This content was uploaded by our users and we assume good faith they have the permission to share this book. If you own the copyright to this book and it is wrongfully on our website, we offer a simple DMCA procedure to remove your content from our site. Start by pressing the button below!
0).
--
1
i]
N,
~
Up
id
1 8,
c tL~
D1
'\ 17
( D~Ud
c
82 L ~ D2 '\ -
~
- f-
- L
UL
U
N2
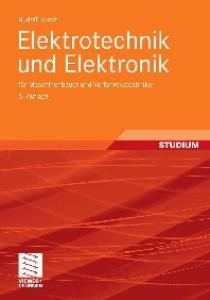
S] wird geöffnet, S2 geschlossen. Beim Öffnen von S] ändert UL die Polarität und hält i2 aufrecht. Die primäre Teilspannung Up überschreitet dabei Ud und schaltet die Freilaufdiode D 2 ein, wodurch auch i] weiter fließt.
R
Uuv
UR
V
i2
--
N,
2
.~
Up
i]
id -
L~
\ 8,
D,
( D~Ud ,7822
,17 f-
-----. L
UL
U
N2
..
~
D2
UR
V
h
--
N,
3 e~ L
D,
\ 8,
,17 f-
id
·
Der Strom i] ist vom Schalter S] auf die Freilaufdiode D2 kommutiert
• der Energießuss ist umgekehrt. • S2 ist noch stromlos.
i]
R
UUV
Der Laststrom i2 zeigt mit der Lastzeitkonstunten LlR einen exponentiellen Verlauf.
~
Up
( D~Ud
·
i] ~
Unter dem Einfluss von Ud ändert seine Richtung. Nach dem Stromnulldurchgang von i] blockiert D2 und der Strom i] wird von Ud über S2 weitergetrieben (uuv> 0, i2> 0). Der Strom i] ist von der Freilaufdiode D 2 auf den Schalter S2 kommutiert.
82 L ~ D2
~l
AbbUduog 12-2 Schaltermodell des I-phasigen Wechselrichters mit ohmseh-induktiver Last
207
12.1 Wechselrichter mit eingeprägter Spannung (UWR)
Die Ausgangsspannung UUv ist näherungsweise rechteckf"önnig. Die Amplitude ist von der Gleichspannung Ud und dem Übersetzungsverhältnis des Transformators abhängig. Auf der Primärseite fließt i l über unterschiedliche Pfade, die in Abb. 12-2 dargestellt sind.
12.1.2
Ausf'lihrungsbeispiel mit Thyristorschalter
Werden die Schalter in Abb. 12-2 durch Thyristoren realisiert, so erhält man zunächst die Schaltung nach Abb. 12-3. Hierin ist auch der Kondensator CK zur Bereitstellung der erforderlichen Kommutierungsspannung fiir die Thyristoren TI und T2 dargestellt uuv
"UV
ULA::JV
UL ... jV
I Ud
1:~
Du
""
01
0,
CK
T, ,
'~T1
Cd
~
f'>
udl
~01
r-T1
.~~
~ T,
0,1
r- D, ~
Cd
LK
I Grundschaltung
Verbesserte Schaltung
Der Kondensator CK ist auf 2Ud aufgeladen.
Die Dioden DI\ und D22 verhindern eine ungewollte Kondensatorentladung, die induktivität L K verhindert den Einfluss von D\ und D2 auf die Thyristor-Kommutierungen.
Abblldung 12-3 Selbstgeführter Thyristorwechselrichter
Um zu vermeiden, dass sich der Kondensator CK im Löschaugenblick über die Freilaufdioden D\ bzw. D2 über einen Kreisstrom iKrcis entladen kann, ist eine Kommutierungsdrossel L K erforderlich. L K wirkt auch auf die Stromübergabe zwischen Thyristor und Freilaufdiode, die dadurch verzögert wird. Die Dioden D ll und D 2\ sollen ein vorzeitiges Entladen von CK verhindern. Die Wirkungsweise soll ausgehend von Abb. 124 betrachtet werden (T2 leitet). Abblldung 12-4
CD --+
~
,
1:~.
l-phasiger Wechselrichter mit AC-seitigem Mittelpunkt und Kommutierungseinrichtungen
u~v -
1Du
01
',,-Tl
"CK
",
UCK
Cd
LK
Ausgangssituation: 021
T2
0, ~ L
T21eitet, uCK ~2Ud>
UUV>O.
208
12 Se1bstgefiihrte Stromrichter
In Abb. 12-5 wird TI gezündet. CK löscht T2. Der Strom ist von der InduktivitätL der Lastseite eingeprägt und fließt daher weiter über TI und CK. Dabei wird CK umgeladen. Es fließt zusätzlich ein Kreisstrom iKreis über D2-D2rCK-TI> welcher sich zum Laststrom in CrTrLK überlagert. Abblldung 12-5
-
,
--
~
1"
1::.
~
DILl"
f=
J
UCK_ •.......................... ( iLOsCH \,
Tl \',. _______________
Cd
Tbyristorkommutierung mit anschließender Umladung von CK • Der Löschstrom fließt nur fiir kurze Zeit und ändert die Kondensatorspannung UCK praktisch nicht.
+ ___./
,
F--T2 I"
•
UCK
baut über D2 den Kreisstrom iKrcis
auf. Ao der Primärwicklung des
LK
Transformators wirkt die Spannung up.
iKnn.
Up~
Ud+UCX:
Ist CK soweit umgeladen (Nulldurchgang von ueid, dass sich der Kreisstrom durch D 2 umkehren will, so verlöschen D2 und D21. Der Strom wechselt aufDI> wodurch die Durchflutung des Transformators auf die andere Wicklungshälfte wechselt (Abb. 12-6). Der Gleichstrom id wechselt dadurch seine Richtung, und es wird Energie zur Gleichstromquelle übertragen (Rückspeisung). Abblldung
12~
Rückspeisemodus, UUV < 0, iu > 0
-[7
1::
Cd
DI
" cK ,"
~TI
"CK
Die Last speist Energie in die
,[7
Gleichspannungsquelle zurück.
'~
Der Kreisstrom iKreis baut sich in der Praxis langsam über ohmsehe Verluste und Durchlassspanoungen ao den Ventilen ab.
T2
iKreis
LI'
.
LK
Dieser Zustand dauert solange, bis der (induktive) Verbraucherstrom unter dem Einfluss der Spannung UUv seine Richtung ändert. Dann ändert sich die Durchflutungsrichtung des Transformators, die Freilaufdiode D I sperrt, und TI führt den Strom allein (Abb. 12-7). Bei der Stromübergabe an den Ventilen DI und TI wirkt sich die Induktivität L K nachteilig (d. h. verzögernd) aus. Deshalb wird L K in der Praxis mit einer Mittelanzapfung als Saugdrossel ausgeführt. Der Kreisstrom sollte vollständig abgebaut werden.
209
12.1 Wechselrichter mit eingeprägter Spannung (UWR)
Abblldung 12-7
Ende der Kommutierung @)
Der Laststrom iu hat seine Richtung umge-
--
kehrt, womit die Kommutierung abgeschlossen ist. Es gilt: uuv < 0, iu < O.
s~ 11 CK
L~
1:~
Dl
,
~Jl
," UCK
T2S
Der Kuodensator CK ist mit der dargestellten Polarität löschbereit für die Ablösuugvon Tl durch T2' (UCK~2 Ud!
K0,L~
Cd LK
Die vollständige Periode der Ausgangsspannung UUv und des Stromes i u zeigt Abb. 12-18. Die Spannung Uuv ist idealisiert rechteckf"6rmig dargestellt. Der Einfluss der Kondensatorspannung uCK in Abb. 12-5 ist somit vernachlässigt. Der Verlauf von i u entspricht daher einer Exponentialfunktion mit der Zeitkonstanten TL. Die Höhe des Effektivwertes der Ausgangsspannung (Uuv) kann über die Eingangsspannung Ud und das Übersetzungsverhältnis des Transformators eingestellt werden. Die stets vorhandene Streuinduktivität des Transformators sollte so klein wie möglich sein, da sie zu einer Vergrößerung der Zeitkonstanten TL führt.
N2
+U·- d N I
R.ückspeisung
Uuv
Or-~~---------+~~------~~~--~
t
(j)
!al!
I. ;'4 ~,"
@)
~ Abblldung 12-8 Ausgaogswechselspannuog (idealisiert) uuv uod Ausgaogsstrom iu (Die Zahlenaogaben beziehen sich auf die entsprechend gekennzeichoeten Schaltbilder.)
210
12 Se1bstgefiihrte Stromrichter
12.1.3
3-phasige Brückenschaltungen
Als Beispiel für eine Brückenschaltung wird eine 3-phasige Wechselrichterschaltung vorgestellt. Den prinzipiellen Aufbau der 3-phasigen Wechselrichterschaltung mit Einspeisestromrichter (ESR) und Zwischenkreiskondensator (UZK) zeigt Abb. 12-9. Die Phasenspannung Uv und die Leiterspannung Uuv wird mit den Schaltfunktionen SU. SV und Sw nach Gl. (12-1) bzw. (12-2) hergeleitet. Näheres dazu siehe Kap. 13.1.7.1. In Tab. 12.1 sind die Schaltzustände des Wechselrichters mit den entsprechenden Spannungen uu und uuv aufgelistet. -----------------------------------------"1
r-
l '[ l '[ l
,-----------------~
--
Phasenspannung
'[
~~ jUd!
-"
\.J "2
Cd
2
o
';;;
Cd
0-
N'--"
,--------------------------------------
Sv
+1
i
+1
-I
!
Sv
-I
2'[ 2'[ 2'[
~ UUV
.
'v
-I ,,;' +1
:
UU
iv
K
iw Sw
~
Mittelpunkt-
spannung
1- "Wo
ESR
Wechselrichter
UZK
Abbildung 12-9 Schaltermodell des 3-phasigen V-Wechselrichters (UWR) mit symmetrischer Last Tabelle 12.1 Schalterstellungen und Spanoungen (uuv. uuo. uv) des UWR Cl!
Su
Sv
Sw
Grad
"UV
"UD
Uu
Ud
Ui 2
Ui 3
1
0-60
+1
-1
+1
1
1
1
2
60-120
+1
-1
-1
1
1
2
3
120-180
+1
+1
-1
0
1
1
4
180-240
-1
+1
-1
-1
-1
-1
5
240-300
-1
+1
+1
-1
-1
-2
6
300-360
-1
-1
+1
0
-1
-1
u
W
=
(s
U
Ud - s ).V
2
Sw Ud -).2 3
(12-1)
(12-2)
12.1 Wechselrichter mit eingeprägter Spannung (UWR)
211
In Abb. 12-10 sind die Zeitverläufe der Ausgangsspannung des UWR dargestellt. Für die Phasenspannungen wurde ein symmetrischer Verbraucher angenommen. Die Kennwerte der Spannungskurvenform sind in Tab. 12.2 angegeben. Die Betriebsart des Wechselrichters wird wegen der blockförmigen Spannung als Grundfrequenz- oder Blocktaktung bezeichne!.
U
T3
rot Abbildung 12-22 Spannungs- und Slromverläufe für die Kommutierung voo TI --> T3
222
12 Selbstgeführte Stromrichter
Der Spitzenwert uD! liegt nach GI. 12-7 erheblich über der Kondensatorspannung. Die Bemessung der Löschkondensatoren muss deshalb hinsichtlich der Spannungsbeanspruchung der Ventile erfolgen und fiihrt gegenüber vergleichbaren U-Wechselrichtem mit Spannungszwischenkreis zu mehrfach größeren Kapazitätswerten.
>
Bei bekannter Schaltungsdimensionierung kann durch Messung von Uco• Uo bzw. duc und Id mit GI. (12-6) auf die Motor-Streuinduktivität La geschlossen werden.
Die erreichbare Schonzeit tc für die Thyristoren berechnet sich nach Abb. 12-22 und Abb. 12-23 mit GI. (12-8). (12-8) Durch die Kapazitätsbemessung nach der Spannungsbelastung der Ventile ergeben sich für die Schonzeit tc relativ große Werte. Wegen der dadurch geringen Anforderungen an die Freiwerdezeit können somit auch normale Netzthyristoren eingesetzt werden. UTi
• Uo
t Uo
AbbUdung 12-23
e
Verlauf der Ventilspannung
~H?-!e e e ges
=
zur Berechnung von tc nach GI. (12-8) Während der Umladung ist UTl = uc.
le 2
Da jede Kommutierung über zwei Stränge des Lastkreises verläuft, gehen die Daten der Last in die Schaltungsbemessung ein. Daraus folgt, dass die Schaltung nicht für veränderliehe Belastungsimpedanzen geeignet ist. Sie wird einem Lastkreis fest zugeordnet. Ausgeführte 1-Wechselrichter erreichen Ausgangsfrequenzen bis 150 Hz. Der Laststrom hat durch die harmonischen Kommutierungsvorgänge cosinusförmige Flanken. Für die Kondensatorumladung ist ein Mindeststrom erforderlich. Die Schaltung ist daher nicht leerlauffest. An den Maschinenklernmen treten durch die Kommutierung Überspannungen auf. Bedingt durch die Grundfrequenztaktung des Wechselrichters entstehen - verglichen mit einem Pulswechselrichter - nur geringe Schaltverluste. Vergleicht man den Schaltungsaufbau des Wechselrichters für eingeprägten Strom nach Abb. 12-21 mit dem Wechselrichter für eingeprägte Spannung nach Abb. 12-16. so zeigen sich folgende Unterschiede: •
Der 1WR benötigt keine Freilaufdioden. Der 1WR benötigt keine zusätzlichen Induktivitäten.
223
13 Die Wirkungsweise selbstgeführter UWR Wegen der Bedeutung des Wechselrichters mit eingeprägter Spannung (UWR) wird im Weiteren die Wirkungsweise des UWR vertiefend behandelt. Wir unterscheiden in Abb. 13-1 Wechselrichter in Zwei- und Dreipunkttechnik sowie Multi-level-Wechselrichter. Schaltermodell
Zweipunkt-WR (2-1evel-inverter)
Ud
"uo
r
Ud 2
r-
--t
I-
2
~
Su U
Ud
2
~
juuo 0
Dreipunkt-WR (3-1evel-inverter)
Ud 2
UUo
--t
Ud 2 0
Multi-level-inverter (4-1evel-inverter) uuo
Die Spannung "uo kann bei dem hier dargestellten Brückenzweig eines 4-level-inverters vier Werte annehmen. Die Spannungsstufung kann durch weitere Kondensatoren noch feiner eingestellt werden. Abbildung 13-1 Arten von Wechselrichtern mit eingeprägter Spannung (UWR)
J. Specovius, Grundkurs Leistungselektronik, DOI 10.1007/978-3-8348-8270-7_13, © Vieweg+Teubner Verlag | Springer Fachmedien Wiesbaden GmbH 2011
L...-_-o
224
13 Die Wirkungsweise selbstgefiihrter UWR
13.1
Schaltungen in Zweipunkttechnik (2-level-inverter)
Zur Beschreibung der Betriebsweise eines Stromrichters in Zweipunkttechnik wird die Mittelpunktschaltung nach Abb. 13-2 als Universalschalter betrachtet. Die Last liegt zwischen den Mittelpunkten des Briickenzweiges U und des Zwischenkreises 0 (Bezugspotenzial). Die Zwischenkreisspannung Ud und der Ausgangsstrom iu seien fiir den betrachteten Zeitraum konstante Größen, symbolisiert durch eingangsseitiges C und ausgangsseitiges L.
~d 1
c+
id+
I·················1
~d 1
, .................... !
0
Su_ )
1.
Der Strom fließt unabhängig von seinem Vorzeichen im oberen Schaltelement Su+ und die Ausgangsspannung "Do beträgt Ud /2.
2.
Der Strom iu fließt unabhängig von seinem Vorzeichen im unteren Schaltelement S Aund die Ausgangsspannung "Do beträgt -U,y2.
3.
Dieser Zustand würde den Zwischenkreis korzschließen (verboten).
4.
Der Strom iu fließt je nach Vorzeichen im oberen oder im unteren Schaltelernent. Die Polarität der Spannung uuo ist demzufolge abhängig von der Stromrichtung. Dieser Zustand tritt im Betrieb nur während der Verriegelungszeit der Transistoren auf.
13.1 Schaltungen in Zweipunkttechnik (2-level-inverter)
13.1.1
225
Schaltfunktionen
Ordnet man den Schalterstellungen I (offen) und 2 (geschlossen) eine Schaltfunktion 3U gemäß Tab. 13.1 zu, dann lassen sich die Schaltzustände I und 2 mit Hilfe der Schaltfunktionen su+ und su- und GI. (13-1) nach Tab. 13.2 darstellen. Das + f - Zeichen kennzeichnet den oberen und unteren Schalter des Brückenzweiges. Tabelle 13.1 Schaltfunktion
-
Symbol 1
2
~
SteUung
NU
offen
0
geschlossen
I
(13-1) Tabelle 13.2 Schaltfunktionen und Ausgang.größen der Ersatzschaltung
z
su+
NU_
1
1
0
2
0
I
uUD
id+
i _ d
Ud 2
iU
0
Ud 2
0
iu
-
Die Ausgangsspannung uuo verläuft sprungförmig und ist eine Funktion der Schalterstellung und der Zwischenkreisspannung Ud' Der hier als konstant angenommene Phasenstrom iu wird je nach Stellung der Schalter auf einen der Leiter des Zwischenkreises geschaltet. Der Verlauf der Zwischenkreisströme weist daher ebenfalls Sprünge auf - die eingangsseiligen Kondensatoren müssen daher zur Vermeidung von Überspannungen induktivitätsfrei mit den Transistoren verbunden sein. Ein Brückenzweig nach Abb. 13-2 hat im Betrieb 2 Schaltzustände und kann somit durch einen Umschalter Su nach Abb. 13-3 ersetzt werden. Seine Schalterstellung wird durch eine Schaltfunktion Nu beschrieben, die sich aus der Differenz von su+ und SUnach GI. (13-2) berechnet. Su kann in diesem Fall die Werte +1 und -1 annehmen. (13-2) Tabelle 13.3 Schaltfunktion su eines Briickenzweiges
SchaitersteUung
SchaitersteUung -I
I 11
Die Ausgangsspannung UUD und die Zwischenkreisströme berechnen sich zu:
.
1+ Su .
'd+ = -2-"U
.
1-.U.
'd- = -2-"U
(13-3)
226
13 Die Wirkungsweise selbstgefiihrter UWR
Die hier am Beispiel der Mittelpunktschaltung entwickelte Ersatzschaltung nach Abb. 13-3 für einen Bruckenzweig mit den entsprechenden Gleichungen GI. (13-3) bildet die Grundlage für alle systembezogenen Betrachtungen +1 spannungsgespeister Stromrichter. Unter der Annahme, dass der Ausgangsstrom iu keinen Su Einfluss auf die Zwischenkreisspannung Ud hat, kann der ideal schaltende Stromrichter -I mittels Schaltfunktionen exakt beschrieben werden. In Abb. 13-4 ist die Ausgangsspannung der Mittelpunktschaltung für eine perl"DO odische Umschaltung (Pulsbetrieb) mit der Schaltperiode Ts dargestellt. Im Pulsbetrieb ie!kann der Mittelwert der Ausgangsspannung UUO durch Veränderung des Verhältnisses '--_ _ _ _ 0 TE/Ts beliebig eingestellt werden (TE: siehe Abb. 13-4). Die Mittelwertbildung für uUO erAbbildung 13-3 Bruckenzweig mit Umschalter folgt über eine Periode der Taktfrequenz Ts und wird als Kurzzeit-Mittelwert bezeichnet. Bei einer zeitveränderlichen Schaltfunktion SU kann der Kurzzeit-Mittelwert zeitveränderlich gesteuert werden (gleiteoder Mittelwert) und man erhält z. B. den in Abb.13-4 dargestellten Verlauf für "uo. Bei Blocktsktung arbeitet der Umschalter mit der Grundfrequenz der Ausgangsspannung, so dass Ts = l/f] ist. Das Verhältnis TE/Ts ist konstant 0,5, und es besteht keine Möglichkeit, außer der Frequenz die Kurvenform oder Amplitude der Ausgangsspannung zu beeinflussen.
13.1.2
Kurzzeit-Mittelwert
Die Ausgangsspannung "uo des Bruckenzweiges nach Abb. 13-3 kann nur 2 Werte annehmen. Ein vorgegebener zeitveränderlicher Sollwert uuo Soll kann daher nur über den Mittelwert der Ausgangsspannung "DO abgebildet werden. Weg";" der geschalteteo Charakteristik erfolgt die Mittelwertbildung jeweils über eine Taktperiode Ts, wobei während Ts u uo Soll = "uo angenommen wird (Kurzzeit-Mittelwert, GI. (13-4) ). "uo folgt dem in Abb. i3-4 dargestellteo treppenIormigen Spannungsverlauf. Die Abweichungen von der Sollwertkurve sind in Abb. 13-4 grau dargestellt und heben sich innerhalb einer Taktperiode auf.
(13-4) Durch Auflösung von GI.(13-4) nach der für "uo erforderlichen relativen Einschaltzeit (Tastgrad D) Tp/Ts erhält man GI. (13-5). Bedingt durch die Mindestschaltzeiteo der Bauelemente ist der praktisch erreichbare Steuerbereich von TE/Ts jedoch eingeschränkt. Ud
_
Ud
für·. - -2 < " uo
V10
Te~~
/ V12
L
.....
/ V11
V4
I
~
Dreipunktschaltung, Prinzip.
0 ..
"Do
~dl
L
-'
\ Vd2
\ V41
2"
011
2" 0,2 c
L -' 0d2
c
041
"Uo
L -'
Die vereinfachend dargestellten Schalter haben praktisch eine Ventilwirkung und müssen für Blindströme durch geeignete Dioden ergänzt werden. Dadurch entsteht das Schaltbild b).
Abblldung 13-22 Herleitung der Dreipunktschaltung mit Ventilreihenschaltung
244
13 Die Wirkungsweise selbstgefiihrter UWR
Schaltzustände: Spannung Uuo durch Phasenverschiebung bestimmt
Spannung UUo durch SchaltersteIlung bestimmt
011
7V11
.~~: .010 V,2
--
0,2 •
+--t-'''-
uuo
I
2
3
uuo UUo
4
5
6
Die Schalter V 11, V 12 sowie V 41 und V 42 symbolisieren jeweils ein Halbleiterventil und lassen daher nur eine Stromrichtung (hier von oben nach unten gerichtet) zu. Die Spannungsbelastung der Ventile ist durch die Spannung eines Eingangskondensators festgelegt Tritt zwischen den Ausgangsgrößen u und i eine induktive Phasenverschiebung auf, so sind daher parallel zu den Schaltern Freilaufdioden vorzusehen. In Schaltung 3 und 6 sind für beide Stromrichtungen Freilaufdioden vorgesehen (vollständige Schaltung nach Abb. 13-21). }>
UUo = 0 bei SchaltersteIlung 2 kann bei einer durch die induktive Phasenverschiebung vorgegebenen Stromrichtung (3) nur durch SchaltersteIlung 5 erreicht werden!
13.2 Schaltungen in Dreipunkttechnik (3-level-inverter)
13.2.1
245
I-phasige Brückenschaltung
Mit 2 Brückenzweigen kann die Brückenschaltung nach Abb. 13-23 aufgebaut werden. Abhängig von den Schaltfunktionen su und Sv treten insgesamt 9 verschiedene Schaltzustände auf. Diese sind mit den entsprechenden Ausgangsspannungen in Tab. 13.8 aufgelistet.
~d
,
+1
C+
0
,
iu
Su -1
idO
~d
Tabelle 13.8 Schaltzustände der Brückenschaltung
id+
U
+1
0
Sv
Iv
luuv V
-1
C_ ie!-
Ahhildung 13-23 Ersatzschaltbild der I-phasigen Brückenschaltung in Dreipunkttechnik
Die Ausgangsspannung Uuv berechnet sich durch GI. (13-39), den entaprechenden Zeitverlauf zeigt Abb. 13-24. Die Zwischenkreisströme id+, id- und idO berechnen sich mit GI. (13-40).
Uuv
su
SV
1
1
1
0
2
1
0
112
3
1
-I
1
4
0
1
-112
5
0
0
0
6
0
-]
]/2
7
-]
]
-]
8
-]
0
-112
9
-1
-I
0
Ud
(13-39)
Su + 1 Sv + 1 (sU-2- - sV-2-)'iu s -1 u
s-1 v) .
(13-40)
(sU-2- - sV-2- 'I U Abbildung 13-24 Ausgangsspannung "uv
246
13 Die Wirkungsweise selbstgefiihrter UWR
13.2.2
3-phasige Brückenschaltung
Mit 3 Brückenzweigen erhält man die 3-phasige Brückenschaltung nach Abb. 13-25. Diese Schaltung erlaubt 27 unterschiedliche Schaltzustände. Bei einigen Schaltzuständen erhält man jednch dieselbe Ausgangsspannung, so dass für den Verlauf der Ausgangsspannung Uuv in Abb.13-26 insgesamt 14 Schaltzustände ausreichen.
-
2
-
~
C+
+1
0' ,---
Su
idO
-1
iu +1
0
Sv
~d ~ =;:C_
U
"'-1
iv
V +1
iw
0
Sw
W
-1
UUo
id-
Uy
-----.
+---
""0
o
K
Abbildung 13-25 Ersatzschaltbild der 3-phasigen Dreistufenschaltung
Die Ausgangsgrüßen berechnen sich analog zu GI. (13-12) bis GI. (13-25): (13-41)
(13-42) Su + 1 .
i d+ = sU-2-"u
Sy + 1 . Sw + 1 . + sY-2-"y + Sw --2-"y
(13-43) (13-44)
In Abb. 13-26 sind als Beispiel die Schaltfunktionen und die Leiterspannung Uuv mit der Phasenspannung Uu dargestellt. Der Vergleich mit den entsprechenden Größen der Zweipunktschaltung in Abb. 13-15 zeigt die zusätzlichen Schaltstufen. Durch diese zusätzlichen Schaltstufen kann die Spannungskurvenform mit der Dreipunktschaltung feiner eingestellt werden. Dieser Vorteil ist jedoch mit einem erhöhten Aufwand verbunden. Wegen des vergleichsweise hohen Aufwandes wird die Dreipunkttechnik überwiegend in Schaltungen für höchste Leistun gen (bis ca. 30 MW) eingesetzt. In diesen Schaltungen kann mit einer Zwischenkreisspannung Ud gearbeitet werden, die dem zweifachen Wer! der Zweipunktschaltung entspricht.
13.2 Schaltungen in Dreipunkttechnik (3-level-inverter) 14
i
9
2 10 3 11 i 4 12 5 13: 6
247
14 1
9
Zustand
~l~.-+~-.~-r-T-+~--.r,-+~--r-+-+-~-T-+------L--w~~~t
~1"
" w t
SV;
~1~~-+-+~~~+-~~~~~-r-------.·
!-_______ w t
-1
...., ÜUVI
.....
./
:'
".
/
au,1 ... w t
_._. __._.-'-------'
AbbUduug 13-26 Schaltfunktiouen und Ausgangsspannungen der Dreiponktschaltung
Ein Vorteil der Dreipunkttechnik ist die im Vergleich zur Zweipunkttechnik bei gleicher Zwischenkreisspannung halbierte Spannungssteilheit. Diese Eigenschaft führt auch zu einem verbesserten elektromagnetischen Verhalten. Folgende Tabelle zeigt den Aufwand sowie die Spannungsbelastung der Ventile für eine vergleichbare Zwei- und Dreipunktschaltung:
Zweipunktschaltung
Dreipunktschaltung
Dioden
6
18
Transistoren
6
12
Kondensatoren
I bzw. 2
2
Spannungsbelastung
100%
50%
Über die Schaltfunktionen kann bei der Blocktaktung nach Abb. 13-26 die Ausgangsspannung gesteuert werden. Abb. 13-27 zeigt den Einfluss des Steuerwinkels ß auf uuv.
248
13 Die Wirkungsweise selbstgefiihrter UWR
p=
0
rot
Uuv
-6:i
ß
_TT
j"
'--+-----.
Ud 2 rot
rot
TT
ß=-
2
i·
ß=2TT
3
rot Abbildung 13-27 Leiterspannung "uv bei unterschiedlichen Steuerwinkeln
13.3 Multi-level-Schaltungen
13.3
249
Multi-level-Schaltungen
Zusätzliche Spannungsebenen lassen sich durch die Kombination von Teilspannungen erzielen. Die Teilspannungen werden durch kapazitive Spannungsteiler bereitgestellt und sind von der Einschaltdauer der Ventile bestimmt. Den Aufbau eines Phasenbausteins in Multi-IevelTechnologie zeigt Abb. 13-28. Für den Anwender ergeben sich folgende Vorteile: Die Spannungskurvenform kann feiner an die Sinusform angenähert werden, wodurch ein eventueller Filteraufwand verringert wird. Die Leistung des Wechselrichters wird erhöht, ohne die Ventilspannung zu vergrößern. Die Spannungssteilheit ist durch die stufenweise Spannungsumschaltung reduziert. Abbildung 13-18
c
Typischer Aufbau eines Brückenzweiges in Multi-level-Technologie
Sm+
Die Kondeosatoreo sind unterschiedlich aufgeladen. Die Kondeosatorspannungeo werden im Betrieb aktiv durch die Schaltmuster aufrechterhalteo.
D
~~~------------------~-----o
Die 6 Schalter einer Phase lassen sich so konfigurieren, das sich am Ausgang vier unterschiedliche Spannungen einstellen lassen. Die möglichen Schalterstellungen zeigt Abb. 13-29 mit den Schaltzustiinden 1-6. Tabelle 13.9 Schaltzustände und Spannungeo eines Multi-Ievel-Brückenzweigs 2
I
uuo=
Ud
U·d 3
Abb.13-29/--+
I
2
3
4
5
6
SI+
I
0
0
I
0
0
S2+
I
I
0
0
I
0
S3+
I
I
I
0
0
0
SI-
0
I
I
0
I
I
S2-
0
0
I
I
0
I
S3-
0
0
0
I
I
I
0
U·d 3
250
13 Die Wirkungsweise selbstgefiihrter UWR
2
I
3
7 SU3+ 7 Sill+
---l
---l
7 SU1+
udl:
c, :
~
C2
t jV
Sm+
'/ SU1+
Ud
C,
I: C,
SUl-
Clf" C,
C,
UUo ~ Ud -
4
C,
C2
Cl
Su2+
Ud
Sm0
UUo~ Ud-"C2~
SUl-
7 Sm-
C,
Ud
Su,- V
C, : C,
ri:
;: ........ U C, SUI_
'---I
Suz-
uu.
, SU3-
Sm-
uu.
0
0
"VO ~ "C2 - "Cl ~
"".
Su>-
Su30
"uo ~ "c2 ~ 113 Ud
113 Ud
Su3+
~~ ~8: ~ C,
"".
Sm_
6
sm+
C,
---I
C,
SUI-
2/3 Ud
Su3+
7 SUl+
I:
UCI ~
Sill+
~V
SUI+
"---1
5
UCI~
sm+
0
Ud
---I
SU3+
r_ ...... u
C2
( Sill0
:
~l
~-C,
Sm_ uu.
SU3-
Ud
Ud
SUl_
Sill_
Uvo~
ri
Sill+
113 Ud
UUo~O
Abbildung 13-29 Schaltzustände des Multi-level-Inverters
Die Zustände nach 3, 4, 5 liefern alle die gleiche Ausgangsspannung. Die Kondensatoren q und C2 sind hierbei aber abwechselnd in unterschiedlicher Funktion (laden, entladen, offen), so dass sich diese Schaltzustände zum Ausgleichen (symmetrieren) der Kondensatorspannungen ausnu1zen lassen.
251
14 Drehstromgrößen in Raumzeigerdarstellung Als ,,Raumzeiger" wird eine Darstellungsform bezeichnet, die speziell fiir Berechnungen in 3und 4-Leitersystemen geeignet ist. Die Raumzeigerdarstellung, anfangs nur fiir die Magnetfeldbeschreibung von Drehfeldmascbinen entwickelt, wird wegen der erheblichen Vereinfachung und Anschaulichkeit auch fiir die Beschreibung von Strömen und Spannungen in Mehrphasensysternen eingesetzt [5, 6]. Sie sind nicht zu verwechseln mit den (Zeit-) Zeigern der Wechselstromtechnik. ~
Der Raumzeiger stellt die Größen eines mehrphasigen symmetrischen Systems durch eine Komplexe Zahl mit den Koordinaten a-j3 dar.
14.1
Raumzeigertransformation
Als Raumzeigertransformation bezeichnet man die Umwandlung dreier zeitabhängiger Spannungen oder Ströme beliebiger Kurvenform mit den räumlichen Koordinaten U,V,W in • •
eine komplexe Zahl, dem eigentlichen Raumzeiger mit den Koordinaten IX und ~, sowie ein Skalar, das so genannte Nullsystem.
Raumzeiger sind Scheitelwertzeiger. Sie haben die Komponenten u'" und u~. Das IX-~-Koordi natensystem ist räurulich so orientiert, dass die positive Richtung der Phasenspannung !!u mit der positiven Richtung der IX-Koordinate übereinstimmt (Abb. 14-2). Der Raumzeiger !I. soll aus praktischen Gründen die gleiche Länge wie die Phasengrößen im UVW-System aufweisen, so dass im IX-~-System ein Normierungsfaktor von (2/3) zu berücksichtigen ist. Die Transformationsgleichungen sind in GI. (14-1) auf Basis des Drehoperators !! mathematisch definiert.
Drehoperstor : (14-1)
Raumzeiger : Nullgröße
GI. (14-2) beschreibt mit den Spannungen UU, Uy und Uw ein symmetrisches sinusförmiges Drehspannungssystem (die Phasenverschiebung ,,-2lli3" bedeutet, dass die Spannung Uy gegenüber Uu um 1200 nacheilend ist (uw eilt um 120 0 vor).
uu(t)
=
u·cos(rot)
uy(t) = u·cos(rot - ~rr) uw(t)
=
u.cos(rot+i rr)
I (e jrot = u'A
2
A
I
j(rot-t~)
2 I
j(rot+~~)
= u·-(e =
+ e -jrot)
u.-(e 2
3
+e +e
-j(rot+t~)
-j(rot-~~)
)
3)
J. Specovius, Grundkurs Leistungselektronik, DOI 10.1007/978-3-8348-8270-7_14, © Vieweg+Teubner Verlag | Springer Fachmedien Wiesbaden GmbH 2011
(14-2)
252
14 Drehstromgrößen in Raumzeigerdarstellung
Der Raumzeiger des symmetrischen sinusförmigen Dreiphasensystems nach Gl. (14-2) hat eine konstante Länge und beschreibt in der ",-ß-Ebene während einer Periode eine vollständige Drehung in mathematisch positiver Richtung, d. h. er ist linksdrehend (linksdrehend durch die hier gewählte Phasenfolge des Drehspannungssystems!). Er beschreibt gleichzeitig die Mittelpunkt- und Phasenspannungen, da in der Mittelpunktspannung UKO enthaltene Gleichkomponenten nicht in den Zeiger Y. eingehen. Abb. 14-1 zeigt den Verlauf dieses Drehspannungssystems als Liniendiagrauun und die entsprechende Zeigerdarstellung. Zeigerdiagrauun
Liniendiagrauun U
UU
o I-I--ir-----j'----\--f---T-
Abblldnng 14-1 SinusfOnnige Speisung, Drehspannnngssystem nach GI. (14-3)
In Abb. 14-1 ist die Zeigerlänge durch den Normierungsfaktor 2/3 an die Amplitude der Phasenspannung des Drehspannungssystems angepasst. Zusätzlich ist fiir zwei Winkel (0° und 90°) die Zusammensetzung des Zeigers y. angedeutet. Die Beträge der Komponenten sind dem Liniendiagrauun (rechts im Bild) entnommen.
3-phasige Wicklnngsanordnung und UVW-Koordinatensystem: In Abb. 14-2 ist die Anordnung der drei Statnrwicklungen einer Drehstrommaschine und das dazugehörige UVW-Koordinatensystem dargestellt. W
u
V
-
u V
3-phasige Wicklung Ahblldnng 14-Z 3-Phasensystem
W 3-phasiges Koordinatensystem
14.1 Raumzeigertransfonnation
253
2-phasige Wicklungsanordnung und a-p-Koordinatensystem: Das 2-phasige Ol-ß-Koordinatensystem in Abb. 14-3 ist räumlich stillstehend und bezieht sich auf den Stator der betrachteten Drehfeldmaschine, wobei die positive Richtong der aKoordinate mit der Richtong von Strang U bzw. mit der Phasenspannung Uu übereinstimmt.
a 2-phasige Wicklung
2-phasiges Koordinatensystem
Abbildung 14-3 2-Phasensystem Die Komponenten ua und uß werden aus den Phasenspannungen uU,Y,W nach GI. (14-3) ermittelt (die positiven Richtongen der U- und a-Achsen stimmen überein!). Zunächst werden die U-V -W Komponenten des Zeigers im a -fl-Koordiantensystem beschrieben:
a U
Ua
=
I . "u
1
- 2" .u y
-
1
(14-3)
2" . Uw
u.=O·u +.!.v'3,u y _.!.v'3,u " U 2 2 w Die Normierung von GI. (14-3) (d. h. Multiplikation mit 2/3) liefert GI. (14-4): Ua
up
=
2
3" . Uu - 3"1 . u y ,fj
= 0 . Uu + ""3 .u y
3"1 . Uw
-
-
(14-4)
,fj
""3 . Uw
Umformung der Darstellung in Matrixform:
11
=
ua up
=
2 3 0
-1 3 1
,fj
-1 3 -1
uy
,fj
U
Uu
(14-5)
w
Vereinfachung durch Ausnutzung der Symmetriebedingung: Für
~u =
0 =
U
u
+
uy
+ Uw
folgt
U
w
= -uu -
uy
254
14 Drehstromgrößen in Raumzeigerdarstellung
Mit dieser Symmetriebedingung lässt sich GI. (14-5) vereinfachen:
u
= "" =
1 0 IL 2 lU ../3../3 "v
=
lulei '" mit
lul = ~ u~
+u~
(14-6)
In der Praxis wird der Raumzeiger oft aus den leichter zugänglichen Leiterspannungen "uv, Uvw und"wu gebildet. Dazu legt man die VW-Achse in die ß-Achse des 2-phasigen Systems, so dass man folgende Beschreibung des Spannungszeigers !!. erhält:
ß VW
"" u
"~
=
../3 2 -1 2
"" "ß
0 I
-../3 2 -1 2
"uv "vw
(14-7)
"wu
~ Aufgrund der Symmetriebedingungen kann GI (14-7) wieder durch 2 Leiterspannungen ausgedrückt werden. Wählt man wieder die Normierung auf die Phasenspannungen (Multiplikation mit 2/3), so erhält man schließlich GI. (14-8).
u
= "" = "ß
2 ../3
o
1 ../3 1
Uuv Uvw
(14-8)
Um eine Normierung auf den Scheitelwert der Leiterspannungen zu erreichen, muss die Normierung mit dem Faktor 2/(3../3) erfolgen. Man erhält schließlich GI. (14-9).
!!.
"a "ß
2 3
0
1 3 1
/3
"uv "vw
(14-9)
Die hier am Beispiel eines symmetrischen sinusförmigen Drehstromsystems gewonnenen Gleichungen lassen sich - wie eingangs erwälmt - auch auf andere Kurveuformen anwenden. Bei Stromrichterspeisung ist die Leiterspannung durch Schsltvorgänge bestimmt, d. h. sie kann nur bestimmte (diskrete) Werte annehmen. Der Raumzeiger der Spannungen wird daher keinen Kreis beschreiben, sondern jeweils nur einen Punkt in der af}-Ebene abbilden. So hat ein 2Punkt-UWR 8 Schaltzustiinde, so dass max. 8 Punkte dargestellt werden können. Im Falle des 2-Punkt-UWR liegen im Nullpunkt die Punkte 7 und 8 übereinander, d. h. sie sind redundant (Ein Raumzeiger der Länge Null wird als NuUzeiger bezeichnet!). Es sind also nur 7 Punkte sichtbar. Der 3-Punkt-UWR zeigt bei 27 Schaltzustiinden 19 verschiedene Spannungsraumzeiger. Auch hier treten bei bestimmten Schaltzustiinden ,,redundante" Spannungszeiger auf, so dass nur 19 Punkte sichtbar sind.
14.2 Stromrichterspeisung
14.2
255
Stromrichterspeisung
Der zeitliche Bewegungsablauf des Zeigers !! bei Stromrichterspeisung unterscheidet sich nach der Art des Wechselrichters und des Steuerverfabrens. Der Spannungszeiger dreht sich nur bei einer Änderung des Schaltzustandes in eine neue Winkelposition.
uuv
r······· .... ······· .... ·········!
Uu
t
i................................i Abbildung 14-4 Stromrichter in 2-Punkt-Technik und Grundfrequenztaktung
Bei Z Schaltzustiinden resultieren beim 3-phasigen 2-Punkt-Wechselrichter Z = 2'= 8 diskrete Raumzeiger. Der Raumzeiger beschreibt in Abb. 14-4 ein Sechseck mit dem Radius 2/3 Ud. Die Nullzeiger!!.7 und !!.g treten bei der Grundfrequenztaktung (s. Abb. 13-15) nicht auf. 4
d
11
3
Abbildung 14-5 Stromrichterspeisung in 3Punkt-Technik Der 3-Punkt-Wechselrichter
--
2 5
Cl
liefert mit Z
= 33 = 27
Schaltzuständen 19 unterschiedliche Spannungsraum-
zeiger. (Nullzeiger: Schaltzustände 7, 8 und27). Alle Schaltzustände des 2Punkt-Wechselrichters sind
hierin enthalten.
6
14
1
Der Spannungsraumzeiger des 3-Punkt-Wechselrichters beschreibt in Abb. 14-5 ein Sechseck wie der 2-Punkt-Wechselrichter, jedoch ändert sich bei einigen Schaltzustiinden auch die Zeigerlänge, so dass bei der Grundfrequenztaktung auch Punkte innerhalb des äußeren Sechseckes erreicht werden können. Die innen liegenden Punkte können jeweils durch zwei verschiedene Schaltzustiinde eingestellt werden. Die angegebenen Ziffern beziehen sich auf die Schaltzustiinde nach Tab. 14.1.
256
14 Drehstromgrößen in Raumzeigerdarstellung
Tabelle 14.1 Schaltzustände des UWR
Nr.
SUSVSW
1 2 3 4 5 6 7 8 9 10 11
12 13
14 15 16 17 18 19 20 21 22 23 24 25 26 27
Spannung
Schaltfunktion
+1 +1 +1 -1 -1 1 +1 -1 +1 +1
1+1 -1 -1 +1 -1 +1 -1 +1 +1 1+1 +1 +1 -1 -1 -1 0 o -1 o +1 1 -1 +1 0 -1 o +1 o -1 +1 +1 o +1 +1 0 0 +1 +1 0 o +1 0 o +1 +1 0 0+1 0 1 0 o -1 -1 0 o -1 -1 o -1 -1 0 0 -1 -1 0 0 0 0
(2/3 ~ 0,667
1/,f3
UUo
"vo
Ud +112 +112 +112 -112 -112 112 +112 -112 +1/2 +1/2 0 -1/2 -1/2 0 1/2 1/2 1/2 0 0 0 0 0 0 -1/2 -1/2 -1/2 0
Ud
~
0,577
verkettet
uwo
Ud
112 -112
+1/2 -112
+112
-112 -112
+1/2 +1/2 112 +112 -112
-1/2 0 1/2 1/2 0 -1/2
0 0 1/2 1/2 1/2 0 1/2 -1/2 0 0 0 -1/2 0 112 ~ 0,5
1-1
L I -1
3-Punkt
2-Punkt
_o~
Zeiger
DC-Mittelpunkt
+1/2 +1/2 +112
Uuv Uvw Ud 1 1 0 -1 -1 0 0 0 1 1/2 1/2 -1 -1/2 1/2 1/2 1/2 0 -1/2
-112 0 -1/2 1/2 0 1/2 1/2 1/2 0 0 0 1/2 -1/2 1/2 0 0 1/2 -1/2 1/2 -1/2 0 -1/2 -112 0 -1/2 0 0 0 0 1/3 ~ 0,333
Ud 2 Ud 2
Ud 1 0 1 1 0 1 0 0 -1/2 1/2 1 1/2 -1/2 -1 -1/2 0 1/2 1/2 0 -1/2 1/2 0 1/2 1/2 0 -1/2 0 ../3/6
+# +:~ --
Komponenten
ua
uß
Ud 1/3
Ud -1/,f3 0
213
1/3 -1/3 -213 113
0 0 1/2 1/2
0 -1/2 -1/2 0 1/6 1/3
1/6 -1/6 -1/3 -1/6
1/6 1/3 1/6 -1/6 -1/3
-1/6 0 ~
+11-/3
+1/../3 0 -IN3
0 0 -../3/6 + -13 16
+ 1/../3 + ../3 16 -../3/6
-1/../3 -[3/6 0 +.,f3/6
+../3/6 0 - ../3 /6 - ";3/6 0 +.,f3/6
+../3/6 0 -[3/6 0
Zeiger lul L(u) Deg. Ud 60· 2/3 O· 2/3 60· 2/3 120· 2/3 180· 2/3 120· 2/3
-
0 0 -30· 1/../3 1/[3 30· 90· 1/../3 150· 1/../3 1/../3 -150· -90· 1/../3 -60· 1/3 O· 1/3 60· 1/3 120· 1/3 180· 1/3 1/3 -120· 60· 1/3 O· 1/3 60· 1/3 120· 1/3 180· 1/3 -120· 1/3 0 -
0,289
1/6 ~ 0,167 )
UWR
'UUV
-r-'UVWl
"vO
257
15 Steuerverfahren für UWR Die Aufgabe eines UWR, d. h. eines Wechselrichters mit eingeprägter Spannung, besteht im Allgemeinen darin, ein im gleitenden Mittelwert sinusfönniges Drehspannungssystem variabler Grundschwingungsfrequenz zu erzeugen. Dabei wird eine Gleichspannung durch Halbleiterschalter in gepulster Form an die Last weitergegeben. Der Klirrfaktor (s. GI. (15-3» dieser gepulsten Spannung ist zunächst unabhängig von der Schaltfrequenz oder der Pulsweitenmodulation konstant. Erst durch Filterung dieser gepulsten Spannung z. B. durch ein Filter oder die Impedanz einer angeschlossenen Asynchronmaschine (ASM) und den daraus resultierenden Stromverlauf ist der Vorteil einer Pulsung ersichtlich. Je höher die Pulsfrequenz wird, desto geringer werden die Oberschwingungen im Strom - und somit auch die Zusatzverluste und Drehmoment-Oberschwingungen (pendelmomente) einer ASM. Mit einer erhöhten Schaltfrequenz bzw. angepassten Pulsweitenmodulation können erforderliche Filterwerte reduziert werden. Dies hat ein geringeres Volumen und eine kostengünstigere Anschaffung der Anlage zur Folge. Daröber hinaus bedentet eine erhöhte Eckfrequenz des Filters auch eine geringere Dämpfung der Grundschwingung. Ein wesentlicher Nachteil einer erhöhten Schaltfrequenz ist allerdings eine gleichzeitige Erhöhung der Schaltverluste in den Leistungshalbleitern, die neben einem verringerten Wirkungsgrad auch einen steigenden Aufwand in der Kühlung der Halbleiter bedeuten. Dies lässt wiederum Volumen und Kosten der Anwendung steigen. Eine Aufgabe für die Projektierung ist es, für diesen Widerspruch bei der Auslegung und Stenerung eines Pulsstromrichters in Verbindung mit einer Drehfeldmaschine einen vernünftigen Kompromiss für einen Energieeflizienten Antrieb zu finden. Im Folgenden werden dafür grundlegende Begriffe und Methoden für die Steuerung eines UWR vorgestellt. Schwerpunkt dieser Betrachtongen ist die Anwendung des UWR in Verbindung mit einem Drehstromantrieb, vorzugsweise einer ASM.
15.1
Begriffe
Viele wichtige Kennwerte für den Betrieb eines UWR beziehen sich auf den stationären Betrieb und sind damit Grundlage für vergleichende Untersuchungen. Ausgangspunkt der Betrachtungen sei ein einphasiger Wechselrichter nach Abb. 15-1.
.......... _-
.....
Abblldung 15-1
Brückenzweig
o
_.._---- l_l~ R
L
U
Su
+1
..
UUD
Cl I:
2
~
u
Ol
:::J
.SI
CI)
Einphasiger Wechselrichter mit eingeprägter Spannung Die Steuerong setzt die Sollwerte für U undfin die Schsltfunktion su um.
~ f
..
' - - - - - - - - - - - " , , --..-. . --'---_ .....
J. Specovius, Grundkurs Leistungselektronik, DOI 10.1007/978-3-8348-8270-7_15, © Vieweg+Teubner Verlag | Springer Fachmedien Wiesbaden GmbH 2011
15 Steuerverfahren fiir UWR
258
Die Ausgangsspannung UUO,RMS lässt sich in einen Grundschwingungsanteil UUO,I und einen Verzerrungsanteil Uuo,vz aufspalten. Der Effektivwert der Grundschwingung ist die eigentliche Nutzgröße. Die Grundschwingung überträgt die Leistung und erzeugt das Drehmoment einer Drehfeldmaschine. "uO,1 entspricht der zeitkontinuierlichen Beschreibung des Stromrichters und lässt sich mit GI. (15-1) durch die Modulationsfunktion m beschreiben. uUO,1 =
Ud
mT
M=
UUO•1 Ud
(15-1)
2 Die Frequenz Ji heißt Ausgangs- oder Grundfrequenz mit der Periode Tl ~ IIJi. Alle weiteren Frequenzkomponenten der Ausgangsspannung UUO bilden den Verzerrungsanteil UUO vz. Der Effektivwert Uuo,vz berechnet sich mit GI. (15-2). '
U UO,VZ
= ~ utO,RMS -
(15-2)
UtO,1
"uO,1
/
~lUUO,1
~
uuo
Ud 2
/1
Grundschwingung "uo,vz
t
1 Ausgangsspannung "uo eines einphasigen Wechselrichters nach Abb. 15-1 mit PWM und einer Taktzahl von q = 20
Verzerrungsanteil
Abbildung 15-2 Ausgangsspannung eines einphasigen Wechselrichters mit PWM
Zur Beschreibung der Spannungsqualität wird der Klirrfaktor k (auch Total Harmonie Distortion, THD) bzw. der GrundschwingungsgehaIt g nach GI. 15-3 ermittelt. kund g werden oft auch in Prozent angegeben. (Bei eindeutigen Größen kann der Index RMS entfallen.)
k
__ U VZ,RMS UUO,RMS
0" k" 1
sowie g
= V~ 1- k-
(15-3)
Verzerrungsfaktor Aufgrund des Verzerrungsanteils der Ausgangsspannung entstehen in den Wicklungen einer Maschine Stromoberschwingungen. Die Folge sind zusätzliche Stromwärmeverluste (siehe
259
15.1 Begriffe
auch Kapitel 16.4). Diese Verluste sind proportional zum Quadrat des Verzerrungsstroms Iv. Der Verzerrungs strom Iv kann nach GI. (15-4) aus dem Stromistwert iu abzüglich Grundschwingungskomponente iU,1 in Abb. 15-3 ermittelt werden. T
I
v
=
(15-4)
Lf(i -iU,I )2 dt T U o
Bezieht man den Verzerrungsstrom Iv eines beliebigen Pu1smusters auf den Wert bei Grundfrequenztaktung IV,GT, so erhält man mit GI. (15-5) für dieses Stromrichter-Maschinen-System den Verzerrungsfaktor d:
IV d=--
(15-5)
I VGT
Abbildung 15-3 Zur Definition des
Verzerrungsstromes Iv
iu: Stromistwert iU,l: Stromgrundsehwingung
T
tTr~vV' ~ A
----------------~
~v
/\/\AAA
v
AAA/
VV'
VIT:
Als Schaltfreqnenz fs wird die Anzahl der Schaltzyklen eines Schalters pro Zeiteinheit bezeichnet Ein Schaltzyklus besteht nach Abb. 15-4 aus einem Ein- und Ausschaltvorgang. Bezieht man die Schaltfrequenz Is auf die Grundfrequenz I1 der Ausgangsspannung, so erhält man mit GI. 15-6 die Schalt- oder Taktzahl q: Taktzahl
(15-6)
Wenn die Taktzahl q ganzzahlig ist, spricht man von synchroner Taktung oder synchroner Modulation. Das Pulsmuster ist dann mit der Ausgangsfrequenz synchronisiert. •
Bei synchroner Taktung können Ausgangsspannungen und -ströme durch Linienspektren beschrieben werden.
Das Linienspektrum der Ausgangsspannung erhält man durch die Entwicklung einer Fourierreihe für die Schaltfunktion. Für die Ausgangsspannung UUo kann somit die Fourier-Reihe nach GI. (15-7) formuliert werden. Durch die Viertelperiodensynunetrie der Schaltfunktion in Abb. 15-4 vereinfacht sich die Fourierreihe, und das Spektrum der Ausgangsspannung UUo wird nach GI. (15-7) nur durch Sinusfunktionen ungerader Ordnungszahl v beschrieben. Es treten nur ganzzahlige Oberschwingungen auf.
260
15 Steuerverfahren fiir UWR Viertelperiodensymmetrie:
u{t)
=
-u{t + ;)
(15-7)
u uo
Ud T'L cv·sin{v w
j
v = I, 3, 5, 7,9, 11, ...
t)
v
IIfI
P
+1
I 0 -I
T/2
IT/4
Schaltzyldus
I
Schaltzyldus,
+1
I
~
---,p
, . . -_ _
_, 1~ .1 PU Schaltzyklus
T
I
t
I
'J .W -I
r-
1 TI>
m I I
TF.·
L -_ _ _---I
!
R±JlL...-----..lF. ~ T
AbbUdong 15-4 Schaltfunktionen mit Viertelperiodensymmetrie, Taktzahl q ~ I, 3, 5
In Abb. 15-5 ist das typische Spektrum fiir synchrone Taktung (q = 40) dargestellt. Neben der Ausgangsfrequenz 11 und den Vielfachen der Scbaltfrequenz Is treten Anteile mit Summenund DifTerenzfrequenzen (Seitenbänder) auf. Arbeitet der Wechselrichter mit variabler AusgangsfrequenzfI, aber konstanter Schaltfrequenz/s, so ist die Taktzahl q im Allgemeinen nicht mehr ganzzahlig. Die Betriebsart wird als asynchrone Taktong bzw. asynchrone Modulation bezeichnet. Die Ausgangsspanoung"DO kano dano nicht mehr durch ein diskretes Linienspektrum nach GI. (15-7) beschrieben werden, sondern nur durch ein kontinuierllches Spektrum. Ein Beispiel zeigt Abb. 15-6 fiir a ~ 0,9 und eine Taktzahl q = 145/50 = 2,9. •
Ein kontinuierliches Spektrum enthält auch Frequenzanteile unterhalb der GrundschwingungsfrequenzfI. Diese Frequenzanteile werden als Sobharmoniscbe bezeichnet.
Bei asynchroner Modulation treten daher Schwebungen mit der Summen- und Differenzfrequenz von TrägerfrequenzfT und Grundschwingungsfrequenz/l auf. Abb. 15-7 zeigt den Einfluss von 2 Seitenbändern (45 Hz und 245 Hz) auf die Ausgangsspanoung beifI = 50 Hz. Diese Schwebungen erzeugen zusätzliche Verluste und Leistungspulsationen. Liegt die Trägerfrequenz fT nahe der Ausgangsfrequenz fI, so treten die niederfrequenten Leistungspulsationen durch eine zunehmende Welligkeit der Zwischeokreisspanoung störend in Erscheinung.
15.1 Begriffe
261
Geregelte Antriebssysteme können durch diese Schwebungen instabil werden. Für höhere Ausgangsfrequenzen muss daher auf eine synchrone Taktung gewechselt werden.
............... fs ................ ...................................•.................. ... ... ... ··unteres
~ . oberes
.•
........ ··2fs ..................... -·3's ·· ..................... ·l· .... .
nfl• . !~~~~~~;~~ 12fS-~I~+"113~,~~lp+2fII • • • • •T• 2_00
00
4.00
8.00
6.00
fuqu=(I 10). Die Höhe der Trägerfrequenz wird durch die Schaltverluste begrenzt. Langsame Schalter wie z. B. GTO-Thyristoren erlauben bei einer Schaltfrequenz von 400 Hz eine asynchrone Taktung bis zu einer Grundfrequenzli von max. 40 Hz. IOBTs erlauben je nach Leistung Schaltfrequenzen von 1,5 kHz und mehr, so dass dann türJi " 150 Hz grundsätzlich die asynchrone Taktung eingesetzt weIden kann.
- -/,,- -
1
fs 145 Hz Ji - 50Hz a
=
0,9
Frequenz ____
500Hz
AbbDdong 15-6: Spektrum bei asynchroner Taktung mit q - 2,9 (Ausschnitt)
j
mit unterem S.lIIInblnl
~=U~dUm-n
j,
•
'.'
0
0
100ms •
200m,
300ms
400ms
•
Abblldug 15-7 Einfluss der Seitenbinder auf die Ausgangsspannung (fi - 50 Hz)
t
~
15 Steuerverfahren fiir UWR
262
15.2
Die Grundfrequenzsteuerung
Die Grundfrequenz- bzw. Taktsteuerung ist die einfachste Betriebsart eiues Wechselrichters und lässt sich mit verhältnismäßig geriugem Aufwand realisieren. Hierdurch erklärt sich die weite Verbreitung dieser Steuerungsart. Als Beispiel fiir eiuen Wechselrichter dient hier die eiuphasige Mittelpunktschaltung nach Abb. 15-8. Der siuusfönnige Sollwert "uO,Soll wird über eiuen Komparator (K) iu die Schaltfunktion SV umgewandelt und steuert den Schalter Su. Brückenzweig
~d !
"oj
~"jJC'_. .
R_"u-o_L__U
"vO,Soll
u
~ .........
~ 11
1-----
TI ----~
UUO "uO,1
... +-_ .... ~su ! ~ ... _........ _........ _;
Abbildung 15-8 Wechselricbter mit Grundfrequenzsteuerung (Blocktaktung, q ~ I)
Die Ausgangsspannung uuo dieses Wechselrichters ist proportional zur Schaltfunktion SV. In diesem Fall ist die Ausgangsspannung "uo eiu symmetrisches Rechteck mit der Höhe Ur!2. Der Effektivwert ist gleich Ur!2. Die Grundschwiugungsamplitude iluo ist konstant und berechnet sich nach GI. (15-8). Diese Betriebsart wird auch als Blocktaktung bezeichnet.
Es gilt: u... ~ uO,1
folgt fiir die Grundschwiugung: Amplitude:
Effektivwert:
I
=
Ud 4 T'rr
UUO,I =ll, U d
=
U d·O,45
"UO I
=
Ud
-·e 2
..fi
=
2 rr'Ud
=
(15-8)
UlO,637
Der Wechselrichter iu Grundfrequenzsteuerung kann nur die Ausgangsfrequenz festlegen. Die Steuerung von fi erfolgt über die Taktfrequenz.
fi
15.3 Die Pulsweitenmodulation (PWM)
263
Eine Steuerung des Effektivwertes der Ausgangsspannung Uuo kann nur über die Gleichspannung Ud erfolgen. Der Modulationsgrad M dieser Schaltung ist nach GI. (15-9) konstant (GI. (13-10».
Ua/2
"Uo wt
11 f!
wt
wt
----o.j
AbbUdung 15-9 Uuo-Spannungssteuerung über die Zwischenkreisspannuog Ud
Modulationsgrad
M
A
Aussteuerung
=
UUO,1
U1. d
Ud
Ud
2
2
TI
4 TI
1,27 (15-9)
1,00
Hinweis: Der Modulationsgrad M gibt das Verhältnis von Grundschwingungsamplitude zur Gleichspannung Ua/2 an. Dieses Verhältnis folgt aus der Fourier-Analyse der Kurvenfonn. Die Aussteuerung A beschreibt dagegen das Verhältnis der aktuellen Grundschwingungsamplitude zum theoretischen Maximalwert, d. h. zur Grundschwingungsamplitude eines Rechtecksignals (vgl. Kap. 13.1.4 und 5).
15.3
Die Pulsweitenmodulation (PWM)
Führt der Wechselrichter zusätzlich zur Grundfrequenztaktung weitere Schalthandlungen durch, so kann neben der Frequenz auch die Höhe der Ausgangsspannung eingestellt werden. Man spricht dann von einer Pulsweitenmodulation des Wechselrichters (Pulse Width Modulation, PWM). Die Pulsweitenmodulation des Wechselrichters kann mit einer konstanten, ganzzahligen Taktzahl q (synchrone Taktung) erfolgen (Abb. 15-10), oder mit einer frequenzabhängigen, nicht ganzzahligen Taktzahl q (asynchrone Taktung) nach Abb. 15-12. /';.t
:'MJ ßJ n~. U Nl/1
wt
/';t
wt
wt
AbbUdung 15-10 Polsweitenmodulation - Einstellung der Grundschwingong UUO,! durch einen zusätzlichen Spannungspuls einstellbarer Breite (At) bei syochroncr Taktung
15 Steuerverfahren fiir UWR
264
Bei der synchronen Taktung wird durch mindestens einen zusätzlichen Spannungspuls der Breite !J.t die Amplitude der Grundschwingung eingestellt. Bei asynchroner Taktung arbeitet der Wechselrichter mit fester Taktfrequenzh und mit einer Taktzah1 q > 10. Dabei werden über eine Periode der Ausgangsspannung die Pulsweiten so gesteuert, dass sich der Mittelwert uuo über eine Pulsperiode Ts (Kurzzeitmittelwert) auf einen vorgegebenen, im Allgemeinen sinusförmigen Kurvenverlauf einstellt (gleitender Mittelwert). Abb. 15-11 zeigt die Ausführung eines einphasigen Wechselrichters mit Pulsweitenmodulation durch einen Sinus-Dreieck-Vergleich im Komparator K. Abb. 15-12 zeigt den Verlauf der elektrischen Größen bei einer ohmsch-induktiven Last. uuo,Sou: uf> :
Sinusförmige Sollwertgröße mit Ausgangsfrequenzfi Dreiecksignal der Trägerfrequenzh
Ein Träger- bzw. Dreiecksignal Uf> mit der Trägerfrequenz h wird mit einem sinusf6rmigen Sollwert der Frequenz fi im Modulator K verglichen. Die Schnittpunkte beider Signale bilden die Umschaltzeitpunkte fiir den Umschalter Su, die Schaltfunktion S(]. Die Frequenz und Amplitude der Grundschwingung werden somit durch die Frequenz fi des Sollwertsignals
.... ------- .....
Brückenzweig
Abbildung 15-11 Wechselrichter mit Pulsweitenmodulation
o
R
L
"Uo
U
Su
+1
lfr~m4.
.... _-----_ ....
Der Komparator K steuert die Schalterstelluog über die SchaltfunktionSU f>u>O: f>ul
"'min
rt--
~I u~n I~ 0
1T
6
UUV
Oll
271
"'min .;
r-
b)
•
------li>l :.---
"'min
UUV Oll
0
1T
1T
6
2
----!,"'min
c)
Oll
------.j!1"'min
1T
2
Abblldung 15-21 F1ankeumodulation
Abb. 15-21 zeigt, wie bei konstanter Pulsbreite Ilmin der Aussteuerungsbereich fiir die Grundschwingung UUV,l bei der 3-fach-Taktung durch seitliche Verschiebung erweitert werden kann. Den Maximalwert fiir UUV,l ergibt Abb. 15-21c, den Minima1wert Abb. 15-2Ia. Durch die Begrenzung der Aussteuerung und der Schaltfrequenz fs,max wird bei drehzahlvariablen Antrieben mit geringer max. Schaltfrequenz während des Drehzahl-Hochlaufs die Taktzahl q geändert und die Modulationsart zwischen den verschiedenen Referenzkurven (Sinus-, Supersinus-, Trapez- und Rechteck-Referenz) nach Bedarf in Abhängigkeit von der Frequenz und Aussteuerung) umgeschaltet. Abb. 15-22 zeigt beispielhaft die Betriebsarten eines drehzahlverällderlichen Traktionsantriebes. Die maximale Schaltfrequenz fs max beträgt bei einem GTO bestückten Stromrichter derzeit 400 Hz. Schneller schaltende Bauelemente wie z. B. IGBTs arbeiten je nach Leistung mit mindestens 600 Hz und erlauben die Ausdehnung der asynchronen Taktung bis über den gesamten Drehzahlbereich.
synchron
---------'~
AusgangsfrequenzJi
Ji
Abblldung 15-22 Betriebsarten bei begrenzter Schaltfrequenz Die Wechselrichtertotzeit ist vernachlässigt, q ~ 1: Taktbetrieb, q > 1: Pulsbe1rieb.
Beim Anfahren mit asynchroner Taktung beträgt die Ausgangsfrequenz des WR nur wenige
Hz. Bei länger andauerndem Anfahrbetrieb arbeiten die einzelnen Wechselrichterphasen praktisch im Dauerbetrieb. Zur Venneidung einer Überlastung des Stromrichters durch Schaltverluste wird für Frequenzen unterhalb 5 Hz häufig die Schaltfrequenz des WR reduziert. Im Allgemeinen wird die Schaltfrequenz in diesem Bereich auf ca. 50 Hz (fs,recV herabgesetzt.
15 Steuerverfahren fiir UWR
272
15.3.4
Off-Iine optimierte Schaltfunktionen
Ein grundsätzlich anderer Ansatz fiir die Bestimmung der Schaltwinkel als beim Trägerverfabren basiert auf der Fourier-Reihe der Ausgangsspannung. Dieses Verfahren wird insbesondere bei relativ geringen Schaltfrequenzen und Antrieben geringer Dynamik eingesetzt. Zusätzlich zur Taktzahl q kann durch F estlegung der Schaltwinkel Ol das Spektrum der Ausgangsspannung direkt beeinflusst werden. Folgende Verfahren stehen zur Auswahl: Die E I i m i n a t ion diskreter Frequenzen im Spektrum zur Vermeidung von Resonanzanregungen, Die 0 p tim i e run g des Spektrums hinsichtlich minimaler Motorverluste, Drehmomentpulsation oder Motorgeräusche.
15.3.5
Eliminationsmethode
Damit eine E1imination von Oberschwingungen erfolgen kann, sind zusätzlich zu den festen Schaltwinkeln bei wt ~ 0 und TI (vgl. Abb. 15-4) freie Schaltwinkel erforderlich. Deshalb muss eine bestimmte Mindesttaktzahl q vorliegen.
su::l
I
F ta l = ta
I
S'{
I I Ud I
uuvl
I
su ,....----,,....----, ..J
L.J
SV ---I"'"
UUVo n
sv
L.J
r- .. t
L..--...J
L..--
mUd
000
[
n n
r----1 n r----1 L..--...J U U L...--
uuvO 0 0 0 [lUd D0 0 0 D
..
t
Bei der Taktzahl q ~ 3 kann die Aussteuerung der Grundschwingung bereits über einen freien Winkel eingestellt werden (Al> GI. (15-16».
a
t
r-----1 n r-----1 n n r..J U U L..--...J U L..--...J ....J U
a
t
,....----,,....----,
L..--...J
su
,...,
L..--...J
[
Bei der Taktzahl q I gibt es wegen der Viertelperiodensymmetrie nur feste Winkel, und die Grundschwingung ist eine konstante Größe.
• t •
t
o. t
Bei höheren Taktzahlen als 3 kann zusätzlich zur Grundschwingung die Aussteuerung fiir weitere Harmonische eingestellt bzw. nuIlgesetzt werden. Bei der hier dargestellten Taktzahl q ~ 5 lässt sich zusätzlich die Ausstenerung fiir eine Oberschwingung einstellen.
AbbUdung 15023 KllIvenformen unterschiedlicher Taktzahl q
Die Anzahl der freien Schaltwinkel Nberechnet sich aus der Taktzahl q zu:
N =
'l.=! 2
freie Schaltwinkel pro Viertelperiode
(15-14)
Für eine Taktzabl von q ~ 5 ergeben sich mit GI. (15-14) N ~ 2 freie Schaltwinkel (Oll> 0l2)'
15.3 Die Pulsweitenmodulation (PWM)
273
s c-
+1
I I
I
~
II
o
I I
1-, TI
TI
2
2
rot
i TI
Abbildung 15-24 Schaltfunktion s mit q ~ S. Definition der Schaltwinkel a".
Eine Definition der Schaltwinkel Cl. am Beispiel der Taktzahl q ~ 5 (N ~ 2 freie Schaltwinkel) zeigt Abb. 15-24. Zur Berechnung der Schaltwinkel Cl. ist abhängig von der für eine Harmonische geforderten Aussteuerung (A v) nach [2, 4] folgende Gleichung zu lösen: Aussteuerung der u-ten Harmonischen: N
A = (I v
+2'L (-!)··COS(V·Cl )) n
11",1
(15-15)
1.) v ~ I, Einstellung der gewünschten Aussteuerung Al für die I. Harmonische (Grundschwingung) U I :
mit:
(15-16)
2.) v > I, für die auszublendende Harmonische Uvwird die Aussteuerung AvNull gesetzt. N
A =(1 +2·L(-I)··cos(v·Cl)) = 0 v
.. "',
n
für v=5 bzw.v=7, 11,13, ...
(15-17)
GI. (15-15) ist nichtlinear und muss numerisch gelöst werden. Für die Elimination einer Harmonischen können mehrere mögliche Winkelkombinationen auftreten, die sich in ihrer Wirkung hinsichtlich der Harmonischen höh= Ordnungszahl unterscheiden. Bei der Auswahl der Schaltwinkel müssen daher auch die Veränderungen bei Harmonischen mit höherer Ordnungszahl berücksichtigt werden. Es ksnn sein, dass trotz Unterdrückung einzelner Harmonischer der Klirrfaktor ansteigt. Aus dieser Überlegung heraus wurden die optimierten Pulsmuster entwickelt.
15.3.6
Optimierte Pulsmuster
Bei optimierten Pulsmustem geht es primär nicht um die Unterdröckung einzelner Harmonischer, sondern um die Absenkung des Gesamteffektivwertes aller Oberschwingungen zusammen (Verzerrungsanteil), d. h. einem minimalen Klirrfaktor ku. Die Elimination von Harmoni-
15 Steuerverfahren fiir UWR
274
schen kann aber zusätzlich erforderlich sein, z. B. um zu vermeiden, Resonanzstellen im Antriebsstrang anzuregen, was auch hinsichtlich des vom Antrieb erzeugten Schallpegels wichtig sein kann. In der Praxis wird daher ein Pulsmuster unter vielen Gesichtspunkten entwickelt und ,,nachoptimiert" . Ein fertig entwickeltes Pulsmuster wird in einem Speicher abgelegt. Das Steuergerät verwendet dann nur noch diese festen Pulsmuster-Tabellen fiir die Einstellung der Ausgangsspannung (Offline-Verfahren). Neben den bisher behandelten gesteuerten Verfahren werden auch geregelte Verfahren eingesetzt, bei denen die Schaltsignale nach dem Prinzip des Zweipunktreglers erzeugt werden (Online-Verfahren). Für dieses Verfahren ist die Bezeichnung DirekJe-Selbst-Regelung (DSR) üblich. Bei der DSR wird die Ausgangsspannung so geschaltet, dass der Stromzeiger bzw. der magnetische Fluss im Luftspalt der Maschine innerhalb eines festgelegten Toleranzbandes liegt. Geregelte Verfahren sind im Vergleich zu gesteuerten Verfahren unempfindlich gegenüber Parameteränderungen.
15.3.7
Raumzeigermodulation
In Abb. 15-25 sind die Schaltzustände des 2-Stufen-Wechselrichters bei Grundfrequenztaktung mit Spannungsraumzeigern dargestellt. Eine Wechselrichtersteuerung, wie sie bisher mit verschiedenen synchronen oder asynchronen Pulsmustern vorgestellt wurde, bedeutet in Raumzeigerdarstellung, dass zwischen diesen Schaltzuständen I bis 8 umgeschaltet wird. Der Spannungsraumzeiger durchläuft bei Grundfrequenztaktung daher die Schaltstufen I bis 6 diskontinuierlich und verbleibt in jeder Stufe die gleiche Zeit. Der Wechselrichter stellt keine kontinuierlichen Werte fiir die Amplitude und Phasenlage des Spannungsraumzeigers zur Verfügung. Ein kontinuierlicher Verlauf des Spannungsraumzeigers kann jedoch durch das Verfahren der Raumzeigermodulation angenähert werden. Dazu werden innerhalb des von den Zeigern I bis 6 aufgespannten Sechsecks immer nur die drei Schaltstufen pulsweitenmoduliert ------------------
Pm=J'n
Asynchronmaschine (DAM)
Synchronmaschine (DSM)
Abblldung 16-15 Leistungsbilanz von Synchron- und Asynchronmascbine
übersynchron
Abblldung 16-16
Bctriebszustände einer DAM mit eingeprägter Spaonung
•
Die Betriebsart als Motor oder Generator ist durch das Vorzeichen des Drehmomentes M festgelegt.
o
I
l-s GENERATOR
Aufgabe des Wechselrichters ist es, eine sinusförmige Spannung einstellbarer Frequenz und Amplitude (bei der Synchronmaschine auch Phasenlage) zu erzeugen. Da ein Wechselrichter nur im Schalterbetrieb arbeitet, treten in der Spannung und im Strom Oberschwingungen auf. Die Folge sind elektrische Zusa1zverluste und mechanische Pendelmomente und Geräusche.
288
16 Stromrichter und Maschinen
16.5
Zusatzverluste durch Stromrichterspeisung
Ein Stromrichter stellt stets eine rechteckförmige Wechselspannung zur Verfiigung. Der Effektivwert der Spannung setzt sich aus einem Grundschwingungsanteil U1 und einem Verzerrungsanteil UyZ zusammen (s. Kap. 15) und kann allgemein mit GI. (16-11) beschrieben werden. Die erste Oberschwingung hat hier die Ordnungszahl 5. U
=
~U~ + U~z
mit
Uvz =
H:, U~ s
und
U v = k U,v U 1 folgt: (16-11)
Der Faktor k" v ist bei reiner Sinusform der Spannung Null. Im getakteten Betrieb (q = 1, rechteckförmige Spannung) verhält sich k",v entsprechend GI. (16-12). Für den gepulsten Betrieb (q > 1) folgt k",v aus der Fourieranalyse der jeweiligen Spannungskurvenform u. 1 k U,v = (16-12) v Für den StromeffektivwertIfolgt analog zu GI. (16-11):
mit I
v
= k.I,V 1 1
folgt:
I
= 1 1 ~11+
i: k S
2
(16-13)
I,V
> Die
Stromrichterspeisung fiihrt durch die Verzerrungsanteile zu einer Anhebung des Gesamt-Effektivwertes von Strom und Spannung - und damit zu einem Anstieg der Stromwärmeverluste der Maschine, ohne die Leistung der Maschine zu steigem.
Hierbei ist noch zu beachten, das sich für höhere Ordnungszahlen ein Widerstandsanstieg durch den Skin-Effekt bemerkbar macht. GI. (16-14) und (16-15) zeigen die Berechnung der Stromwärmeverluste P eu bei Stromrichterspeisung einer Asynchronmaschine unter Berücksichtigung des frequenzabhängigen ohrnschen Widerstandes von Ständer (Rs,v) und Läufer (RR,v)' Der jeweils erste Summand beschreibt die Grundschwingungsverluste, der zweite Summand die Zusatzverluste durch Stromrichterspeisung. ~
Ständerverluste:
Peu,s
= 3[I~,IRs,1 + ~ I;,vRs)
(16-14)
~
Läuferverluste:
>
>
Peu,R
= 3[ILRR,1 + v=s ~)~v~)
(16-15)
Wegen der thermischen Bestimmung der Bemessungsleistung eines Antriebes muss die mechanische Leistung eines Antriebes um den Anteil dieser Zusatzverluste reduziert werden oder ein Motor mit entsprechend vergrößerter Bemessungsleistung gewählt werden. Man kann dabei von einer pauschalen Leistungsminderung von bis zu 10 % ausgehen. Wegen des Skin-Effektes (GI. 17-16) kann eine Anhebung der Wechselrichter-Taktfrequenz zu erhöhten Zusatzverlusten fiihren.
289
16.6 Leistungssteuerung bei konstanter Ständerfrequenz
16.6
Leistungssteuerung bei konstanter Ständerfrequenz
Diese Verfahren nach Abb. 16-17 sind nur möglich bei einer Asynchronmaschine. Die Leistungssteuerung erfolgt über den Schlupf s. Die Schlupfleistung Ps wird entweder in einem externen Widerstand (gepulster Läuferwiderstand) oder anein im Rotorwiderstand in Wärme umgewandelt (Drehstromsteller). In iedem Falle hat der Antrieb wegen der Schlupfleistong einen schlechten Wirkungsgrad. Besser ist es, wenn die Schlupfleistong aus dem Läufer über einen Umrichter abgefiihrt und wieder dem speisenden Netz zurückgeliefert wird. Solche Anordnungen werden als Stromrichterkaskaden bezeichnet (USKlOSK). Den Leistungsfluss verdeutlicht Abb. 16-18. Läuferspannung gesteuert
I Ständerspannung gesteuert I
I I
I
Läuferwiderstand
Gegenspannung
1
t
gepulster Läuferwiderstand
Drehstromsteller
I
I
Käfigläufer
USKIOSK I
.j. Schleifringläufer
Asynchronmascbine (ASM) Abbndung 16-17 Steuerverfahren mit konstanter Ständerfrequenz
Wellenleistong Pmech=(I-s)Pn
Po
~etz Po
Po
r --=R Schlupfsteuerung
~
Käfigläufer
Pmech
...............
Schleifringläufer
t
'1 .
i 3-
Umrichter
Stromrichterkaskade, Motorbetrieb
Abbndung 16-18 Leistuogsfluss bei Drehzahlsteuerungen mit konstanter Ständerfrequeoz
290
16 Stromrichter und Maschinen
16.6.1
Drehstromsteller W3
Der Drehstromsteller W3 besteht aus drei Wechselstromstellern WI und steuert den Effektivwert des Drehspannungssystems. Bedingt durch die Anschnittsteuerung ist das Spannungssystem oberschwingungshsltig, wodurch in der Maschine Zusatzverluste und Geräusche entstehen. W3
Abblldung lfi.19
"I
Drehstromsteller
-
Der Drebstromsteller steuert den Effektivwert der Motorspannung durch Phaseoanschnittsteuerung. Dadurch kann das Drehmoment der Maschine abgesenkt werden. Die Drehzshländerung ergibt sich durch den Arbeitspunkt mit dem Gegemunment.
M,n
"2
ASM
"3
Das Verfahren hat wegen der hohen Schluptleistung einen schlechten Wirkungsgrsd 1'\.
M
K
Abblldung 16-20
Drehzahlstellbereich _____
U parameter!L.
M
Steuerung des Drehmomentes
n ' .................................. .
Mdn)
Die Drehzahl ergibt sich durch den Schnittpunkt von Drebmoment- und Gegenmomentkurve. Der Arbeitspunkt ist stabil, wenn OMM
OM L
M L = MM und - - < - dn dn
r--======::-::~_---'~___ ns
nK
Dieses Verfahren ist günstig für Lasten mit quadratischen bzw. kubischen Drehmomentverlauf über der Drehzahl wie z. B. Pwnpen und Lüfter.
Die Drehzahl n liegt im. Bereich nK < n < ns.
~
ns: synchrone Drehzahl
Das erzeugte Drehmoment MM ändert sich mit dem Schlupf s nach der Klossschen Formel (GI. (16-16», das Kippmoment MK ändert sich quadratisch mit der Ständerspannung Uso
MM
= MK
2
mit
sK
S
S
sK
-+-
M
K
U US,n
_ (_S)
2
SK:
Kippschlupf
Us:
Ständerspannung
(16-16)
US,n: Nennspannung
Der Schnittpunkt des Lastmomentes ML mit der Drehmomentkurve der ASM kann sinnvoller Weise nur oberhalb der Kippdrehzahl nK liegen. Deshalb ist diese Art der Leistungssteuerung nur für einen kleinen Drehzahlbereich geeignet. Die Schlupfleistung Ps entsteht allein im Läufer, so dass bei Dauerbetrieb mit erhöhtem Schlupf eine vergrößerte Bernessungsleistung der Maschine erforderlich ist. Für den Wirkungsgrad ~ gilt GI. (16-17). Wirkungsgrad:
Pm PD
11 = -·100 % = (1- s)·100 %
(16-17)
16.6 Leistungssteuerung bei konstanter Ständerfrequenz
16.6.2
291
Pulsgesteuerter Läuferwiderstand
Der Kippscblupf sK einer DAM verhält sich proportional zum Läuferwiderstand. Zur Steuerung des wirksamen Läuferwiderstandes dient ein pulsgesteuerter Widerstand nach Abb.16-21.
f1 ~50Hz
Abbildung 16-21
i2
DAM mit Schleifringläufer und pulsgesteuertem Läufcrwidcnrtand !
[' i
GR
Rx --------------------------
i2
--Bt-
ASM
T
R
Der Gleichstromld wird durch die DrosselLd ideal geglättet. In den Rotorwicklungen fließt daher ein blockf"örmiger Wechselstrom mit dem Effektivwert lz (Abb. 16-21). Die auf der Läuferseite umgesetzte Wirkleistung Ps setzt sich aus einem rotorseitigen Anteil (R2) und einem Anteil des externen Widerstandes R zusammen. Der externe Widerstand wird über den Thyristor T mit der Takt:frequenzh ~ \lT gesteuert und geht mit dem Effektivwert Rx in die Leistungsrechnung nach GI. (16-18) ein. Abbildung 16-22
R
Ermittlung des effektiven Widerstandes R x T~ Taktperiode, TE ~ Einschaltt1auer, a ~ Aussteuerung
Rx.+-I--+---1fOL--+--~f---r~t·
(16-18) Ps: Rotorleistung, R2: Rotorwiderstand Der wirksame Widerstand ist der um den R2Z vergrößerte Wert von R2. Bei nicht lückendem Stromld ergibt sich GI. (16-19) für den Zusammenhang zwischen dem Gleichstromld und dem Effektivwert des LäuferstromesI2. Durch Einsetzen in GI. (16-18) folgt GI. (16-20). (16-19)
(16-20)
292
16 Stromrichter und Maschinen
Über die Aussteuerung a des Thyristors T kann daher die Drehmomentkennlinie nach Abb. 16-23 eingestellt werden. Abbildung lli-23
Drehzahlverstellung bei konstantem Kippmoment M K Die zusätzliche Schlupfleistung fiillt außerhalb der Maschine an.
Rx
Aufgrund der hoben Schlupfleistung bat dieses Verfahren jedoch eineo schlechteo Wirkongagrad. Die Betriebsdrehzahl stellt sich über deo Schnittpunkt mit der Lastmomentkeonlinie aoa1og zu Abb. 16-20 ein.
's
• 16.6.3
Stromrichterkaskade UJ,fi
PI
~ (l-s)·Po ~ Po
~
--
Abbildung lli-24
Stromrichtetkaskade
P2
.,...
Der Frequeozumrichter (FU) speist die Schlupfleistung Ps in das speisende Netz zurück. Bei idealer Maschine und idealem FU eotsteheo dabei keine Verluste. Abhängig vom Umrichtertyp kann durch Steuerung der Leistung Ps nach GI. (16-21) die Drehzahl n in weiten Grenzeo verstellt werden und zwischen motorischem und geoeratorischem Betrieb umgesteuert werdeo.
(UJ,fi )
3FU
3-
n Pm~(I-s)·Po
~P2~S·PO
P l : zugefiihrte Leistung Po: Drehfeldleistung, Ps: Schlupfleistung Pm: mechanische Leistung
(U2,h)
Wenn die im Rotor auftretende Schlupfleistung Ps über einen Frequenzomrichter (FU) wieder in das Netzzurückgespeist wird, so lassen sich die Verluste des vorherigen Verfahrens weitgehend venneiden und man erhält einen Antrieb mit sehr hohem Wirkungagrad. Der läuferseitige Frequenzomrichter muss fiir die Schlupfleistung der Asynchronmaschine bemessen sein. Je nach Anwendungafall bis ca. 20 % der Maschinen-Bemessungsleistung. Die Zusammenschaltung von Asynchronmaschine und Frequenzomrichter nach Abb. 16-24 wird als Stromrichterkaskade bezeichnet. Wir unterscheiden zwischen Stromrichterkaskaden mit Strom- und Spannungszwischenkreisumrichter sowie Stromrichterkaskaden mit Direktumrichter.
n ~
.s·(I- s)
.
lUlt
.s
~
I -
1
P
und
s ~
Die Steuerung von Ps erfolg! über den Frequenzomrichter (FU).
Ps PI
(16-21)
16.6 Leistungssteuerung bei konstanter Ständerfrequenz
M
Untersyncbron
293
AbbUdung 16-25
Übersyncbron
Drehzahlsteuerung mit einer Stromricbterkaskade Die Asynchronmaschine ist statorseitig mit einer festen Frequenzfi gespeist, wodurch die synchrone Drehzahl ns als Bezugsgröße festliegt.
Die seitliche Verschiebung der Kennlinien erfolgt durch den rotorseitigen Frequenzumrlchter. GENERATOR
16.6.3.1
Ausführung mit Stromzwischenkreis
In Abb. 16-26 ist der Stromrichter über eine ungesteuerte B6-Diodenbrücke mit dero Zwischenkreis verbunden. Der Zwischenkreisstrom Id ist mit GI. (16-19) clirekt proportional zum Läuferstrom. Die Kommutierung des läuferseitigen Stromrichters GR erfolgt maschinengefiihrt durch die Rotorspannung. L d begrenzt die Welligkeit von id und verhindert ein Stromlücken. Die Rotorfrequenzh wird nicht beeinflusst, der asynchrone Charakter der Mn-Kenn1inie bleibt erhalteu. fi
~50Hz
il
id
f2~
I
Id
(1-')/1
Trafo
\
t /1
iu
iSl
fi Ld
id
iRI
ASM
GR
--#
t
WR Ud
~
P2
Gegenspannung AbbUdung 16-26 Stromrichterkaskade mit Stromzwischenkreisumrichter
Cl
16 Stromrichter und Maschinen
294
U ÖtI:::::'::::::l 2,h I
~
~Uj,fiqU2,h I ~
B6
:B6C
I~P:]IU'
Abbildung 16-27 Unter- und übersynchrone Betriebsart
Der netzseitige Stromrichter steuert die Spannung Ud> Ld entkoppelt die Span-
nungsoberschwingungen von netz- und
I~~:]tu,
maschinenseitigen Stromrichtern oben: Untcrsynchronc Kaskade (USK)
unten: Übersynchrone Kaskade (ÜSK)
Die Leistungssteuerung erfolgt über die Gleichspannung Ud des netzseitigen Stromrichters. Dieser stellt für den Läufer eine konstante Gegenspannung Ud dar. Für Ud = 0 V verhält sich die ASM wie eine Asynchronmaschine mit Kurzschlussläufer. Arbeitet der Netzstromrichter als Wechselrichter (WR), so ist Ud< 0, wodurch der Nulldurchgang der Mn-Kennlinie schon bei Drehzahlen kleiner als ns erfolgt. Die ASM arbeitet im untersynchronen Drehzahlbereich. Das System wird daher als untersynchrone Stromrichterkaskade (USK) bezeichnet. Durch den eingeprägten Zwischenkreisstrom (siehe id und iu in Abb. 16-26) können ungünstige Drehmomentpendelungen und Netzrückwirkungen auftreten. Wird auch der maschinenseitige Gleichrichter als steuerbare Brücke (B6C) ausgeführt, so kann die Energieflussrichtung umgekehrt werden, d. h. dem Läufer kann Energie über den Zwischenkreis zugeführt werden. In diesem Fall arlJeitet der maschinenseitige Stromrichter als Wechselrichter und der netzseitige Stromrichter als Gleichrichter. Die Gleichspannung Ud unterstötzt den Zwischenkreisstrom Id. Der Nulldurchgang der Mn-Kenulinie wird zu Drehzahlen oberhalb der synchronen Drehzahl ns verschoben (s < 0). Daher nennt man diese Schaltung übersynchrone Stromrichterkaskade (ÜSK). Die Stromrichterkaskade wird häufig zur Leistungssteuerung von Windkraflgeneratoren (optimaler Arbeitspunkt) eingesetzt. Die Drehmomentkennlinie eines Windgenerators zeigt Abb. 16-28 zusammen mit der Kenulinie einer Schleifringläufer-Asynchronmaschine (DAM). Abbildung 16-28
t
optimaler Arbeitspunkt ~>:::'-:+--LL.
Drehmoment-Drehzahl "wind
Kennlinien eines Windrades mit einer Asynchronmaschine als Generator (parameter: vw;oo)
~
Windrad Drehzahl
16.6.3.2
___
AusfiJhrung mit Spannungszwischenkreis
Durch den Einsatz selbstgeführter Stromrichter kann die Rotorfrequenz h von Außen eingestellt werden, so dass sich die mechanische Drehzahl aus dem Verhältnis von Rotor- und Sta-
16.6 Leistungssteuerung bei konstanter Ständerfrequenz
295
torfrequenz ergibt. Die Maschine verliert dabei ihren asynchronen Charakter und verhält sich wie eine Synchronmaschine. Der Energieaustausch wird über die Einstellung der Phasenlage gesteuert, wobei auch induktives und kapazitives Verhalteu der Maschine erzeugt werden kann. Die Schaltung ist wegen der giinstigen Netzverhältnisse sehr gut für die Anwendung bei Windgeneratoren geeiguet. Ein solches Anwendungsbeispiel zeigt Abb. 16-29. fi =50Hz >-31 Aufbau und Leistungsfluss bei Zwischenkreisumrichtern. hn Gegensatz zur SM muss der ASM über den Statcr die Maguetisierungsenergie zugeführt werden.
16.7.1
Prinzip des Direktumrichters
Der Wechselstrom-Direktumrichter (cyc/o converter) besteht aus der Gegenparallelschaltung zweier netzgefiihrter B6C-Schaltungen (Teilstromrichter ST1 und ST2) nach Abb. 16-32.
16.7 Leistungssteuerung bei variabler Ständerfrequenz
- f""""- f""""- f"""" L
"
L"
~
L -'
L
~
L
-'
"
~
L -'
,~
~ ~ ~ 17f-
,~
~~ ~~
!~
i~
297
i2
Symbol
.--------------- _____________ c
ST2
Abbildung 11>-31 Einphasiger Direktumrichter, Schaltbild und Symbol Werden die Teilstromrichter ST I und STz abwechselnd mit Vollaussteuerung betrieben, so ergibt sich die Ausgangsspannung Uz in Abb. 16-33 als Hüllkurve über mehrere Perioden des Drehspannungssysterns. Der Umrichter wird dementsprechend als Hüllkurven- oder Trapezumrichter bezeichnet. u
, , , , , -' ':
):::
~::
L '
Wenn der Motor in _
~
Bereich ~ wird, erfbl&teino ~
""'11 in dc:n. Z'I1riII:hmlIn:i In 4ietcm F.n lIcigI die Zwioclx:nlc'c:ioij_1IDIIIIjj U, enIIpoppcr cing ' ! Der WIder_ lIDd Ra IDUI mder I.qe lC:iD. bei mDimIla" EmocIIIitdmc:r (Ts,-) die VOll der Mw.rhjn" ~ llDer&io bei der n!ll• • (~)Spumnna; (U~ afnneIrtnen Dcl' Wert "'"" Ra bnn mit GL (16-29) JmII:r BcrIlcbidrtiSlm! der """"-iocl> ~ Lcio_ tlml!P.IIIlIl4cm~ 'IM (Ta: 9oJ..hpmoo"'''Iern) cnpjn..Jt wmlca. VerfIIaimlI (z. B.
II1II"
(16-19)
16.8 Energieeffizienz von elektrischen Antrieben
16.8
307
EnergieefTlZienz von elektrischen Antrieben
70 % des Stromverbrauches der Industrie entf"allt auf elektrische Antriebe. Besonders in energieintensiven Branchen, bei mechanisch geregelten Strömungsmaschinen wie Pumpen, Lüftern oder Kompressoren, bei Antrieben mit hoher Betriebsstundenzahl oder Antrieben, die häufig im Teillastbetrieb laufen, gewinnt neben dem Wirkungsgrad zunehmend die Energieeffizienz des gesamten Antriebsstranges an Bedeutung. Abgegebene Leistung Wirkun sgrad = g Aufgenommene Leistung E
in einem Betriebspunkt
. ffizi Abgegebene Energie nerglee enz = Aufgenommene Energie
über ein Lastspiel
In der Europäischen Union wurden daher Gesetze verabschiedet, mit dem Ziel, den Energieverbrauch und damit den COz-AusstoB zu reduzieren. Diese Tatsache schlägt sich in gesetzlichen Vorgaben u. a. zum Wirkungsgrad elektrischer Maschinen nieder (IEC 60034-30). Die Wahl der richtigen Komponenten und Technologien schließt die Lebenszykluskosten der gesamten Anlage mit ein. In der Antriebstechnik sind die Folgekosten im Vergleich zum Anschaffungspreis besonders hoch. So entfallen z. B. 95 % der Lebenszykluskosten eines Motors auf den Betrieb. Dabei sind die Energiekosten der weitaus höchste Kostenfaktor - die Energieeffizienz des Antriebes ist daher von hoher wirtschaftlicher Bedeutung. Ein typisches Antriebssystem setzt sich aus Komponenten mit unterschiedlichen Verlustarten zusammen. Neben den Leerlauf- und lastabhängigen Verlusten treten bei Stromrichterschaltungen schaltfrequenzabhängige Verluste auf. Abb. 16-46 zeigt eine typische Struktur eines netzgespeisten Antriebsstranges (Pulsgleichrichter, PGR) mit Spannungszwischenkreisumrichter (PWR). Die Last bzw. der angeschlossene Prozess legt über die Drehzahl- und Drehmomentanforderungen die eleklrischen Ra\unenbedingungen fest. p
Getriebe
Kupfervertuste
Durchlassverluste
Kupfervertuste
/i"--
ZShnveriuste
"--
i- 1')
(-M)
Lagervertuste (-n) Schaltverluste (-U, fs)
Zusatzverlusta
Eisenverluste
Abbildung 16-46 Struktur eines Antriebsstranges mit Verlustarten
Last
308
16 Stromrichter und Maschinen
Der Gesamt-Wirkungsgrad des Antriebsstranges ('1GesamU nach Abb. 1646 ergibt sich für jeden Arbeitspunkt aus dem Produkt der Teilwirkungsgrade. Optimale Wirkungsgrade werden im Allgemeinen bei Nenulast der jeweiligen Komponente erzielt. hn TeilIastbetrieb liegen die einzelnen Werte deutlich niedriger. (16-30) Typische Größenordnungen für Wirkungsgrade (1]) im Nennpunkt sind:
Komponente
Wirkungsgrad in % bei Nenn/ast
Getriebe
97
Asynchronmotor
94 (je nach Baugröße: > 80)
Stromrichter (pGR+PWR)
96
Transfonnator
95 (je nach Baugröße: > 50)
Typische Lastabhängigkeit von '1 1
+ '1 0
171 0
1
P/Pn~
Zur Vermeidung einer unnötigen Überdimensionierung ist daher die genaue Kenntnis der elektrischen bzw. mechanischen Bedingungen notwendig. Wird z. B. jede Komponente mit einem Sicherheitszuschlag von pauschal 20 % bemessen, so folgt daraus für den Eingangstransfonnator eine Überdimensionierung von ca. 100 %: 1,2 . 1,2 . 1,2 . 1,2 '" 2,0 Der Eingangstransfonnator arbeitet in diesem Fall nur mit max. 50 % Auslastung. Bezogen auf einen Antriebsstrang nach Abb. 16-46 sind folgende Maßna1nnen zur Steigerung des Wirkungsgrades bzw. der EnergieeffIzienz möglich: Einsatz von Energiesparmotnren
In Teil ll der EuP-Richtlinie (EuP ~ Energy using Products) bzw. EU-Richtlinie 2005/32/EG wird der Energieverbrauch bzw. die Effizienz von Asynchronmotoren im industriellen Umfeld behandelt. Diese Richtlinie wurde inzwischen in allen Ländern der Europäischen Union in nationales Gesetz umgesetzt. In der IEC 60034-30 wurden für Asynchronmotoren neue JE-EffIzienzklassen festgelegt (JE ~ International Efflciency):
> > >
JE I (Standard Efflciency, nur noch bis 20 ll zugelassen) 1E2 (High Efflciency, ab 2015 nur noch in Verbindung mit Frequenzomrichter) JE3 (Premium Efflciency)
Betroffen sind alle Motoren:
> > > >
bis 1000V SO/60Hz Leistungsbereich 0,75 - 375kW 2-, 4-, 6-polig Alle Bauformen, Betriebsart S I (Dauerbetrieb)
Die Wirkungsgradverbesserung eines Asynchronmotors (ASM) kann z. B. durch einen Cu-Rotor und ein verlustarmes Blechpaket erfolgen. Für einen 5,5 kW ASM führen diese Maßna1nnen zu bis zu 4 % weniger Verlusten [29].
309
16.8 Energieeffizienz von elektrischen Antrieben Asynchronmaschine
t
~ A
Q
o
Synchronmaschine
o
S
M
M
P
o I
n / ns ---....
o
n / ns ---....
I
Abblldung 1(;,47 Drehmoment- Drehzahl Kennlinien im Vergleich (MK : Kippmoment, MA : Anlaufinoment, P: Wirkleistung, Q: Blindleistung
Der Rotorwiderstand bestimmt bei der Asynchronmaschine die Steilheit der Drehmomentkennlinie im NennpWlkt und damit den Wirkungsgrad der Maschine (Abb. 16-47). Der Idealfall eines senkrechten Verlaufs dieser Kennlinie (fiir RRotor -+ 0) bei der synchronen Drehzahl ns ist nur bei der Synchronmaschine gegeben. Deshalb bietet die Synchronmaschine von sich aus einen höheren Wirkungsgrad. Wird die Synchronmaschine zusätzlich mit permanentmagnetischer Erregnng ausgefiihrt, so entfällt auch noch die sonst erforderliche Erregerleistung und der Wirkungsgrad steigt weiter an. Ferner muss der Umrichter fiir die Asynchronmaschine bei gleicher Wirkleistung größer dimensioniert werden als bei der Synchronmaschine, da er neben der Wirkleistung (P) auch die Magnetisierungs-Blindleistung (Q) übertragen muss. Anwendung einer elektronischen Drehzahlregelung Langfristig ist der Betrieb von Motoren der Effizienzklasse IE2 nur noch in Verbindung mit einem Frequenzumrichter zulässig. Der Frequenzumrichter bietet eine Effizienzsteigerung durch:
> verlustarmer Anlauf (Sanftanlauf) durch Frequenzumrichter z. B. mit einer Uif-Kennliniensteuerung oder Drehstromsteller [29]. Direktanlauf
Elektronisch geregelter Hochlauf (Sanftanlauf)
Abblldung 16-48 Enorgieeinaparung durch
elektronisch geregelten Hochlauf
• o
•
w....
o
t
_
o .jL..-~~----rt _ o
Wrot: Verlustenergie
> Optimierter Teillastbetrieb des Motors. Ein Frequenzumrichter mit
Uif-Kenn1iniensteuerung berücksichtigt im Allgemeinen nicht den aktuellen Belastungszustand des Motors. Durch eine Anpassung des Motorstroms an die aktuellen Lastverhältnisse kann durch den
310
16 Stromrichter und Maschinen
Frequenzomrichter beim Halten der eingestellten Soll-Drehzahl die Frequenz und Spannung abweichend von der Uif-Kenn1inie energieeffizient eingestellt werden. Dem Motor wird lediglich der minirnal benötigte Strom für den aktuellen Belastungszustand zur Verfiigung gestellt. Über diese energieoptimierte Uif-Stenerung lassen sich gerade im Teillastbereich Motorverluste verringern. Der Motor wird dabei nicht mit konstantem Fluss betrieben, hat daher eine etwas verminderte Dynamik. ,--------------- -------------.•.•./.
M
~
.. .\•.•..
o o
._---...
,
.....---'
• _____________________________ J' ~
Abbildung 16-49 Drehmoment- Drehzahldiagramme fiir den 1- und 4Quadranten-Betrieb
Durch Umrichtcrspeisung kann jeder Punkt des MnDiagrammes eingestellt werden.
Aktive Netzrückspeisung der Bremsenergie. Der Einsatz eines Pulsgleichrichters erlaubt die Energieröckspeisung in das Versorgungsnetz und den Verzicht auf einen Bremswiderstand incl. Brems-Chopper. Insbesondere bei Industriezentrifugen oder Fahr- und Hubantrieben kann durch Netzrückspeisung die Energieeffizienz verbessert werden. Bei Schranken-, Garagentor- oder AufZugsanlagen können die HalbleiterSchaltverluste jedoch den Vorteil der Energieröckspeisung wieder aufheben, wenn der Antrieb nur gelegentlich genutzt wird. Hier kann der Verzicht auf die Energierückspeisung und der Einsatz eines konventionellen Diodengleichrichters mit Brems-Chopper vorteilhaft sein. Integration - Mechatronik
> >
Getriebelose Antriebssysteme (Torquemotoren) z. B. bei Papiermaschinen, Servopressen, Schiffshauptantrieben, Bugstrahlruder, Extroder, Zucker- Zentrifugen Kompaktantrieb, Integration von Motor und Anstenerung
Optimierung des Antriebs-Stromrichters
> > > > >
Optimierter Teillastbetrieb z. B. durch Anpassung der Schaltfrequenz oder Zwischenkreisspannung an die aktuelle Belastung Ein aktiver Netzstromrichter (pulsgleichrichter) kann über die Vorgabe cos
Optimale Auswahl und Bemessung der Systemkomponenten (Motor, Getriebe, Leitungen)
311
17 Leistungselektronik und EMV Durch die europäische Vereinheitlichung sind gesetzliche Regelungen fiir die elektromagnetische Verträglichkeit (EMV) von elektrischen Betriebsmitteln erlassen worden. Die zulässigen Grenzwerte werden durch die Fachgrundnorm EN 50081 fiir die Störfestigkeit und EN 50082 fiir das Störvermögen von Betriebsmirteln festgelegt. Für drehzahlveränderliche Antriebe gilt die EMV-NormDIN EN 61800.
17.1
Grundbegriffe
Wie alle Betriebsmittel, so haben sich auch leistungselektronische Einrichtungen wie z. B. Frequenzumrichter in einer elektromagnetischen Umwelt zu bewähren. Er muss äußeren elektromagnetischen Einflüssen widerstehen und produziert selbst wiederwn elektromagnetische Störungen. Das Verhalten von Betriebsmitteln hinsichtlich dieser Kriterien bezeichnet man als elektromagnetische Verträglichkeit. Mögliche Beeinflussungswege, auf denen Störgrößen zu den Störsenken gelangen können, zeigt Abb. 17-1 am Beispiel eines IGBT-Transistorschalters. I elektromagn~
Ud
l
l
Ui
i
c
c4itiv I
tj
A
c4uktiv I
A R
L
"-y----J I galvanisch I
AbbHdung 17-1 Beeinf\ussungswege von Störgrößen
Der Beeinf\ussungsweg läuft über eine oder mehrere Kopplungen zwischen Störquelle und Störsenke, wobei unter Kopplung die Wechselbeziehung zwischen Stromkreisen zu verstehen ist, bei der Energie von einem Stromkreis auf einen anderen Stromkreis übertragen werden kann. Wir unterscheiden nach Tab. 17.1: TabeHe 17.1 Arten der Kopplung
Kopplung
Kopplungspfad
galvanisch
Leitungsimpedanz ZK
induktiv
zeitveränderliches Magnetfeld
kapazitiv
zeitveränderliches elektrisches Feld
elektromagnetisch
hochfrequente elektromagnetische Strahlung
J. Specovius, Grundkurs Leistungselektronik, DOI 10.1007/978-3-8348-8270-7_17, © Vieweg+Teubner Verlag | Springer Fachmedien Wiesbaden GmbH 2011
312
17 Leistungselektronik und EMV
Die elektromagnetische Strahlung spielt erst ab Frequenzen größer I MHz eine Rolle. In den darunterliegenden Frequenzen werden die Störgrößen praktisch nur durch galvanische, kapazitive und induktive Kopplung übertragen. Eine Aussage über die auftretenden Frequenzen und deren Intensität kann nur eine Signalanalyse liefern. Typische Kurvenformen einer geschalteten Spannung zeigt Abb. 17-2.
17.1.1
Störgrößen in der Leistungselektronik
Die Schaltzeit moderner Leistungshalbleiter beträgt weniger als 200 ns. Wird z. B. in der Zeit von !!.t = 200 ns ein Spannungshub von !!.U = 1000 V geschaltet, so erhält man an den Anschlussklemmen des Wechselrichters eine Spannungssteilheit von 5 kV/lls. Die Auswirkung der Schaltgeschwindigkeit auf das Frequenzspektrum der Störgrößen lässt sich am Beispiel eines Spannungsimpulses, wie er z. B. auf einer Motorzuleitung beobachtet werden kaun, demonstrieren. Abb. 17-2 zeigt drei typische Fälle am Beispiel eines Dreieck-, Trapez- sowie Rechteck-Spannungsirnpulses [19]. Abbildung 17-2
u
Rechreck
Spannungsimpulse gleicher Spannungszeitfläche, aber unterschiedli-
Trapez
as
...../
••
cher Steilheit
Dreieck
Tr : Anstiegszeit T: mittlere Impulsbreite
..............
,-
üs: Impulshöhe (Spannungshub 1'1U)
Alle drei Impulse haben die gleiche Spannungszeittläche, aber eine unterschiedliche Flankensteilheit (500 V/IlS (Dreieck), 5000 V/IlS (Trapez) und 00 (Rechteck». Die Spannungshöhe betrage jeweils 500 V. GI. (17-1) zeigt das Amplitodendichtespektrum eines nicht periodischen Spannungsimpulses entsprechend Abb. 17-2.
us
A
= "ST I(
. ("'T) sm 2 WT
",T
H
. (-2-T) sm
2
wTr
)1
(17-1)
2
Diese Funktion wird in der logarithmischen Darstellung durch drei Geradenabschnitte mit den KnickfrequenzenfKI undfK2 nach GI. (17-2) angenähert.
f KI
I
=TIT
f K2
I
=TITT
(17-2)
Das Geradenstück für Frequenzen kleiner fKI ist durch die Spannungszeittläche des Spannungsimpulses bestimmt und ergibt sich in Dezibel (dB) zu: für f« fKI
(17-3)
17.1 Grundbegriffe
t
Abbildung 17-3
'.'.
Verlauf der Spektren bei unterschiedlicher Flankensteilheit
.•.•... .•.•... .•.•...
A
dB
313
AO
~'lo'
•••••
q,........
'.'
......
'
..•.•..
!In
In
I
-
Betrachtet man den Verlauf der spektralen Amplitudendichte nach Abb. 17-3, so lässt sich folgendes feststellen:
I. Beim Dreiecksignal sind die Amplituden bis zu einer Kenufrequenz fKl konstant. Der konstante Wer! A o ist durch die Spannungszeitfläche des Impulses bestimmt und berechnet
sich nach GI. (17-3). OberhalbfKl fallen die Amplituden mit -40 dBlDekade (- 1If2 ) ab. 2. Beim Trapezsignal verhalten sich die Amplituden zunächst konstant bis zur Kenufrequenz fKb fallen danach aber nur mit -20 dBlDekade (- IIf) ab. Erst oberhalb der Kennfrequenz fK2, die abhängig von der FIankensteilheit duldt des Impulses (und damit von der Schaltgeschwindigkeit) ist, fallen die Amplituden mit -40 dBlDekade ab. 3. Beim idealen Schalter, der ein Rechtecksignal erzeugt, tritt fK2 praktisch nicht mehr auf. Der ideale Schalter erzeugt damit im oberen Frequenzbereich um bis zu 20 dB höhere Amplituden bei Hochfrequenzkomponenten als der "langsame" Schalter. Beispiel (u s = 500V):
T (du =500 V ) r dt IJ.S
IlJ.s
=>
f K2 = 0,318·10 s
T (du = 5000Y...) r dt IJ.s
= 100ns
=>
f
6 -1
K2 = 3,18H06 s- 1
Eine Steigeruog der Spannungssteilheit um den Faktor 10 fiihrt zu einem Anstieg der (kapazitiven) Störstromamplituden im oberen Frequenzbereich um +20 dB. Eine nahe liegende Maßnahme zur Reduzierung der Spannungsamplituden ist die Absenkung von Au durch Anwendung der Mehrpunkttechnik. Umrichter in Mehrpunkttechnik (s. Kapitel 13, 3-Punkt-Wechselrichter bzw. Multi-level-inverter) schalten die Spannung über Zwischenstufen, wodurch die Impulshöhe entsprechend reduziert ist. Dieser Effekt wirkt sich bei allen Frequenzen giinstig aus, ist aber mit einern erheblichen Mehraufwand im Umrichter selbst verbunden. Häufig werden so genannte du/dt-Filter zur Reduzierung der Spannungssteilheit eingesetzt. Eine weitere Möglichkeit zum "verschleifen" der Spannungsflanken besteht in langsamen bzw. resonanzgefiihrten Schaltvorgängen (Resonanzstromrichter, s. Kap. 11). idealer Schalter
S
langsamer Schalter
J
Dreipunkt-Schalter
Resonanz-Schalter
J S
Abbildung 17-4 Schaltflanken mit unterschiedlichem Störspektrum
314
17.1.2
17 Leistungselektronik und EMV
Störfestigkeit
Die Störfestigkeit ist das Vennögen eines Frequenzumrichters nach Abb. 17-5, äußeren elektrostatischen bzw. elektromagnetischen Einflüssen zu widerstehen. Abblldung 17-5
einwirkende Störungen, z.B. magnetische Felder
Netz..-.
~:=:::=:::=:::$:==~J
Eingangsfilter
17.1.3
Frequenzumrichter, Störfestigkeit und Störvermögen
Vom FrequenzumrIchter ausgehende Störungen, leItungsgebunden bzw. nicht leitungsgebunden
Auf den Frequenzumrichler
Ausgangsfilter
Störvermögen
Das Störvennögen charakterisiert die vom Frequenzumrichter ausgehenden elektromagnetischen Störungen. Die Störungen werden im Wesentlichen durch schnelle Schaltvorgänge im Leistungsteil des Umrichters verursacht. Bei Frequenzumrichtem mit Pulshreitenmodulation (PWM) bestimmt die Taktfrequenz die vom Umrichter ausgehenden Störungen. Die Störungen werden nach dem Weg charakterisiert, den sie für ihre Ausbreitung nehmen.
17.1.4
Leitungsgebundene Störungen
Hierbei handelt es sich um eine galvanische Kopplung. Die Störungen hreiten sich als symmetrische oder asymmetrische Störströme über die Netzzuleitung, Erdungsleitungen sowie über die Motorzu!eitung aus. Wirksames Gegenmittel ist der Einbau eines Funkentstörfilters.
17.1.5
Nicht leitungsgebundene Störungen
Hierbei handelt es sich um eine Feldkopplung. Abhängig von der Störgrößen-Welleu1änge A. und dem Abstand d zwischen Störquelle und Störsenke unterscheidet man zwischen Nahfeldbeeinflussungen (d < 1J21t, Kopplung kapazitiv oder induktiv) und Femfeldbeeinflussungen (d> 1J21t, Strahlungskopplung elektromagnetisch).
17.1.5.1
Kapazitive Beeinflussungen
Ursache: Koppelkapazität C 12 zweier paralleler Leiter (typisch 5 ... 100 pF/m)
C
"EOE
= 12
d
I
r g;;s2
ln(- + (-) -I) D D
Störstrom: .
dU 12
'C=C I2dt
(17-4)
Die Koppelkapazität erzeugt bei Potenzialsprüngen in einer Stromrichterschaltung (Schaltvorgänge von IGBT, Thyristor usw.) in benachbarten Stromkreisen kapazitive Störströme (ie) und muss daher so klein wie möglich sein. Dafür eignen sich:
17.1 Grundbegriffe
315
kurze Leitungslängen (l), großer Abstand (d) zwischen den Leitern I und 2, kleine Leiterquerschnitte (D) und kleine Er-Werte der Isolierung, Schirmung von Leitungen und Geräten, Belegung freier Kabeladern auf Bezugspotenzial, verdrilltes Mitfiihren eines BezugspotenzialIeiters in Kabeln und Leitungen.
17.1.5.2
Induktive Beeinflussungen
Ursache: magnetische Flussverkettung, beschrieben durch die Koppelinduktivität M]2 zweier paralleler Leiterschleifen (I und 2). I
2
R
!
USt
Koppelinduktivität:
a M
di
1'0 1
a 2
= -ln(1 + (-) 12 2TT d )
(po: Permeabilität des Vakuums)
dt
(17-5)
-d
'/
I
di 1 USt=MI2dt Störspannung:
Die Koppelinduktivität M12 erzeugt bei hohen Stromsteilheiten (z. B. bei Dioden-Kommutierungen, Kap. 3.2) in benachbarten Stromkreisen eine induktive Störspannung USt und muss daher so klein wie möglich sein. Dafiir eignet sich: großer Abstand (d) zwischen Signa\- und Energieleitern, kleine effektive Schleifenflächen (a'l) durch verdrillte Leitungen, Leitungen in ferromagnetischen Rohren, Einbau von Baugroppen und Geräten in ferromagnetischen oder elektrisch gnt leitenden (Cu-) Gehäusen.
17.1.5.3
Elektromagnetische Beeinflussungen
Störgrößen, deren Wellenlänge A in die Größenordnung der räumlichen Gegebenheiten des Stromrichtersysterns passt, breiten sich als elektromagnetische Welle aus. Alle Komponenten und Leitungen wirken fiir diese Frequenzen als Antennensystem. Gegenmaßnalunen sind eine EMV-gerechte Auslegung von Einbau und Verkabelung. So ist nach Abb. 17-6 beispielsweise das Motorkabel geschirmt auszufiihren, der Stromrichterschrank muss HF-dicht sein. Motor, geerdet
geschirmte Leitung ,-------------------------------------,
Frcquenzumrichter
Netzzu1citung. so kurz wie möglich
beidseitig aufgelegt Funkentstörlilter
Mcta1lrückwand des Schaltschrankes mit Erde verbunden
AbbUdung 17-6 Maßnahmen gegen niebt leitungsgebundene Störungen
316
17 Leistungselektronik und EMV
17.1.6
Psophometrischer Störstrom
Für die Beurteilung der Störbeeinflussung von Femsprecheinrichtungen erfolgt fiir die Stromoberschwingungen eine psophometrische Bewertung nach DIN 57 228 Teil I bzw. VDE 0228. Jeder Störfrequenz wird ein so genanntes Störgewicht P/zugeordnet. Nach GI. (176) wird anschließend ein psophometrischer Stör.trom Ist als Ersatzstörgröße ermittelt. Prinzip: Man ersetzt das gesamte Störspektrum durch eine einzelne Frequenz von 1kHz, welche in der Fernsprecheinrichtung den gleichen subjektiven Störeindruck wie das gesamte Störspektrum vermittelt. Diese Ersatzgröße wird als psophometrischer Störstrom bezeichnet.
(17-6) h/ : Faktor, der die frequenzabhängige Kopplung zwischen beiden Leitungen und die Bedingung der Starkstromleitungen berücksichtigt. PI: Störgewicht, das der Frequenzjzugeordnet ist ISt: Psophometrischer Störstrom Stromoberschwingung der Frequenzj
It:
17.2
Netzfdter
Von einer erdfreien Störquelle (Q in Abb. 17-7) gehen zunächst nur symmetrische Störströme aus, die sich längs der angeschlossenen Leitungen ausbreiten (Gegentaktstörung, differential mode). Wie derNetzstrom, so fließt auch der symmetrische Störstromls in Abb. 17-7 auf dem einen Leiter zur Störsenke hin und auf dem anderen Leiter zur Störquelle zurück.
-
Störquelle
las
Störsenke
~---..
UCI
I, I
,
R
Cp
.---~~
t
UC2
~
PE __~_____________.~___~~las~~~
Abblldung 17-7 Durch parasitäre Kapazitäten (Cp) kann sich ein Störstromkrcis über die Erdleitungen (PE) schließen.
las:
asymmetrischer Störstrom
1, : symmetrischer Störstrom Cp: parasitäre Kapazitäten "C: unsymmetrische Störspannung un: symmetrische Störspannung
Symmetrische Störungen liegen vorwiegend im Bereich niedriger Frequenzen bis zu einigen hundert kHz. Parasitäre Kapazitäten Cp in der Störquelle und Störsenke oder beabsichtigte Masseverbindungen rufen jedoch auch einen Störstrom im Erdkreis hervor. Dieser asymmetrische Störstrom las fließt auf beiden Anschlussleitungen zur Störsenke hin und über Erdleitungen zurück (asymmetrische Störung, common mode). Da parasitäre Kapazitäten mit steigender Frequenz immer mehr in einen Kurzschluss übergehen, treten asymmetrische Störströme bei Frequenzen oberhalb einiger MHz in den Vordergrund. Die Entstehung asymmetrischer Störgrößen in der Leistungselektronik soll mit der Schaltung nach Abb. 17-8 verdeutlicht werden. In einem elektrisch leitfähigen und mit PE verbundenen Gehäuse befmden sich ein Eingangstransformator Tr mit nachfolgendem Gleichrichter und
17.2 Netzfilter
317
Glättungskondensator. Der Transistor T arbeitet als Tiefsetzsteller und taklet die Spannung am Widerstand R.
( ......
.................; ................:
~;:c8~mnnnmn
I:
LN
-
.L
.L
t. * \
PE~..
I
T
~Gi
~'i
Abbildung 17-8
Beispiel zur Entstehung asymme1rischer Ströme
R)
.... _-------------------_ ....................................
Aufgrund parasitärer Koppelkapazitäten von den Transistoranschlüssen zum Gehäuse (hier durch C EG dargestellt) und zwischen den Transformatorwicklungen (CI2) fließt bei jedem Schaltvorgang durch Umladung der Kapazitäten ein Verschiebungsstrom aufbeiden Netzzuleitongen (LI, N) hin zum Gerät (Tr), über CI2 und CEG zum Gehäuse und über den Schutzleiter (PE) zurück zum Netz. Dieser Strom wird als asymmetrischer Störstrom las bzw. Gleichtaktstrom bezeichnet. Zur Vermeidung einer Feldkopplung zu anderen Stromkreisen muss der PE räumlich unmittelbar bei den Netzzuleitongen (LI, N) verlegt sein, so dass keine Schleifenflächen zwischen Hin- und Rückleitem auftreten können. Zur Begrenzung der symmetrischen und asymmetrischen Störströme werden Funkentstörfilter vorgesehen. Netzseitig wird ein solches Funkentstörfilter als Netziliter bezeichnet. Netzfilter sind ihrer Wirkung nach Tiefpassfilter, welche die Nutzgrößen (netzfrequente Spannung bzw. netzfrequenter Strom) ungehindert durchlassen sollen und die in der Nutzgröße enthaltenen höherfrequenten Anteile herausfiltem. Die Längsglieder (Induktivitäten) der Filter sind fiir den Betriebsstrom der angeschlossenen Leitongen bemessen. Querglieder (Kondensatoren) sind fiir die Betriebsspannung auszulegen. Da genaue Angaben zur Quellen- und Senkenimpedanz im Allgemeinen nicht vorliegen, wählt man eine Filterschaltong nach Abb. 17-9 mit stromkompensierter Drossel als Standardlösung .
...-.. ----------------------------------------------------- ..... L
Netz
Xl ITJ""" ... XII I I!Vyll i
Abbildung 17-9 Aufbau eines Slandard-Netzfilters mit stromkompensierter Drossel L
Gerät
~ :,...... _-------------------------------------------------_ . ......i:
PE
Außer der stromkompensierten Drossel L zur Bedämpfung von asymmetrischen Störströmen enthält die Schaltong den Kondensator Cx zur Dämpfung symmetrischer Störspannungen und zwei symmetrische Kondensatoren Cy zur Ableitong asymmetrischer Störströme. Diese sind mit dem geerdeten Gehäuse des Gerätes verbunden. Beim Berühren des Gerätes oder bei unterbrochenem Schutzleiter darf keine gefährliche Gehäusespannung aufueten. Aufgrund der VDE-Vorschriften sind zur Vermeidung gefährlicher Gehäusespannungen die Kapazitätswerte fiir Cy auf wenige nF begrenzt. Femer gelten fiir die eingesetzten Kondensatoren erhöhte Sicherheitsanforderungen.
318
17 Leistungselektronik und EMV
Ein sehr effektives Bauelement der Filterschaltung nach Abb. 17-9 ist die stromlwmpensierte Drossel, auch Common-Mode-Drossel genannt, die zwischen Netz und Verbraucher geschaltet wird. Eine stromkompensierte Drossel nach Abb. 17-10 verfUgt über zwei identische Wicklungen, die sich auf einem gemeinsamen Kern befinden.
..
icm
Abbildung 17-10 Ausführung einer stromkompensierten Drossel
in
i~
Der Nutzstrom i" hat keioen resultierenden magneti-
schen Fluss im Kern zur Folge. Damit ist für in nur
-----
.
in
icm
die Streuinduktivität (ca. I % von La) wirksam. Die Gleichtaktströme icm erzeugen den resultierenden Fluss "'cm. Für i cm ist daher die InduktivitätLo wirksam. Der Kern ist geblecht oder besteht aus Ferrit.
cl>cm
Eine stromkompensierte Drossel wirkl fiir den Nutzstrom In bzw. fiir symmetrische Stürströme nur mit der Streuinduktivität (ca. I % von Lo), da sich die magnetischen Flüsse des Hinund Rückstromes (,,) im Kern kompensieren. Bei asymmetrischen Störströmen (Ic:rrJ addieren sich die magnetischen Flüsse (c",), und die Induktivität Lo der Drossel ist voll wirksam. Der magnetische Kreis dieser Drossel muss fiir den zu erwartenden asymmetrischen Störstrom und nicht fiir den Nutzstrom bemessen werden, was sich vorteilhaft auf die Baugröße auswirkt. Die Übertragung des Nutzstromes wird nur durch die Streuinduktivität der stromkompensierten Drossel beeinflusst. Abbildnng 17-11 Stromkompensierte Drossel Stromabhängigkeit der Induktivität einer stromkompcnsierten Drossel
Einfluss eines Differenzstromes auf die wirksame Induktivität L Mit La wird die Induktivität bei Strom Null als Bezugsgroße bezeichnet.
o
o U M U U
l~
U
U U
~
i1iR
-
Damit die Induktivität LO voll wirksam werden ksnn, müssen die Wicklungen völlig symmetrisch ausgefiihrt werden. Abb. 17-11 zeigt als Parameter den Einfluss eines Differenzstromes auf die Stromkompensation. Differenzströme entstehen z. B. durch einen unsymmetrischen Filteraufbau bzw. durch unzulässige Toleranzen der Kondensatoren Cy. Die Kondensatoren müssen in einem weiten Frequenzbereich bis über 30 MHz symmetrisch arbeiten. Den beispielhaften Aufbau eines vollständigen Netzfilters mit den entsprechenden Strompfaden fiir
17.2 Netzfilter
319
symmetrische und asymmetrische SlÖrströme zeigt Abb. 17-12. Während Gx nur die Ausbreitung symmetrischer Spannungen behindert, werden asymmetrische Ströme durch die Induktivität L o der stromkompensierten Drossel LI und Gy begrenzt. Der asymmetrische SlÖrstrom fließt über die Kondensatoren Gy zum Schutzleiter PE. (Ohne Schutzleiter arbeitet dieses Filter nur für symmetrische Störströme.) symmetrischer Störstrom - nur La wirksam
..... -------------------------------------------------------------------...,. , L
: XI
']
:~
:!:
f
N
Ableitung von symmetrischen und
xT-i
LI
Abbildung 17-12
YI
asymmetrischen
Gerät
Störstromen
YI
:
I : PE •. _;"'_ .. _ - _ .. _-_ .. _-_ .. _-_ . .1
..... _------------------------------------------------------------------_....
Asymmetrischer Störstrom - Hauptinduktivität wirksam ... -................................................................... -
...
L
:~ XI
N
PE
'] LI
YI XI: :
:!:
I ""'"
YIT
... _.. - - _.. - -_ .. - -_ .. - --_. --:-
Gerät
I I I I I
'.",-------------------------------------------------------------------_ ..-
Ist das Netzfilter in einem Gerät eingebaut, welches über einen Netzstecker betrieben wird, so muss zur Vermeidung einer gefährlichen Berührungsspannung zusätzlich ein Entladewiderstand parallel zu Gx vorgesehen werden. Tabelle 17.2 Zusammenfassung der Störungsarten
Störungsart Gegentaktsigna1
symmetrisches Slärsignal Gleichtaktsigna1
asymmetrisches Slärsignal
Störspannung
Störstrom
Spannung zwischen Hin- und Fließt über den Netzleiter L hin Rückleitern zum Gerät und über den Neutral(Differential mode voltage) leiter N wieder zurück Spannung zwischen den Leitern und Erde
(Gommon mode voltage)
Fließt über Netz- und Neutra11eiter N gemeinsam zum Gerät hin, über die Erdungsleitung PE zurück
320
17 Leistungselektronik und EMV
17.3
Motoranpassung an den Stromrichter
Die Leiterspannungen am Ausgang eines Wechselrichters können Spannungssteilheiten von 5 kV/l's (IGBT) bis 20 kV/l's (IGCT) aufweisen. Aufgrund dieser Spannungssteilheiten kann es über die Motorzu1eitungen zu einer Abstrablung elektromagnetischer Wellen, zu Wanderwellenproblemen, zu asymmetrischen Störströmen über die Wicklungskapazität (einige nF) und Rotorlager des Motors (Lagerströme) sowie zu Teilentladungen (TE) an der Motorwicklung kommen.
17.3.1
Lagerströme
Potenzialsprünge der Motoranschlüsse führen über parasitäre Kapazitäten zu Verschiebungsströmen innerhalb des Motors, die nach außen als asymmetrische Störströme in Erscheinung treten. Die typischen Wege eines solchen Verschiebungs stromes zeigt Abb.17-13. UVWPE
Lagerstrom
~",~cws~
CSL
~-~-~--~-~J
r CWR IsOla:ellagm::
Csa Wicklung
R_
Abbildung 17-13 Parasitäre Kapazitäten einer Drehstrom-Asynchronmascbine (DAM) und Darstellung eines Strompfades über die elek1riach isolierte Motorlagerung Cws : Kapazität Wicklung-Stator CWR: Kapazität Wicklung-Rotor
CsL: Kapazität Stator-Kugellager (außen)
Stator
Die Belastung der Motorisolation und Rotorlager (die Stromdichte beim Übergang Kugel-Lauffiäche ist theoretisch unendlich und raut die Lauffiäche auf, wodurch die Lebensdauer der Lager deutlich reduziert ist, weitere Hinweise dazu in VDE 0530 Tl. 25) macht Maßnahmen zur Reduzierung der Spannungssteilheiten durch spezielle Umrichter (z. B. Multi-LevelTechnologie, Abb. 17-4) oder durch Ausgangsfilter erforderlich. Motoren werden für den Umrichterbetrieb auch mit verstärkter Isolierung ausgestattet.
17.3.2
WanderweUenprobleme
Verbindungskabel zwischen Wechselrichter und Motor können wenige Meter lang sein oder bis zu mehreren hundert Metern Länge aufweisen. Das Motorkabel wirkt wie eine Antenne, d. h. es erzeugt in seiner Umgebung ein elektromagnetisches Feld, welches mit der Frequenz des Wechselrichters pulsiert. Das Kabel kann unterschiedlich ausgefiihrt werden: ungeschirmt geschirmt » Folienschirm (Alufolie) Folien- und Geflechtschirm (Alufolie I Kupfergeflecht)
»
Um die elektrischen Eigenschaften eines Motorkabels genauer zu beschreiben, müssen zunächst einige technische Daten für ein typisches vieradriges geschirmtes Motorkabel angenommen werden. Die Angaben in Tab. 17.3 sind auf die Längeneinheit I m bezogen.
17.3 Motoranpassung an den Stromrichter
321
Tabelle 17.3 Typische Werte eines geschirmten Motorkabels (4 x 6 mm')
Induktivitätshelag
Ader Schirm
IlIlf/m O,71'H/m
Ader-Ader
120pF/m
Ader - Schirm
190pF/m
Ader
3,6mO/m
Schirm
5,4mO/m
L'
Kapazitätsbelag
C'
Widerstandsbelag
R'
Mit Hilfe dieser Daten ist es möglich, Kennwerte für ein Kabel zu berechnen. Zur Vereinfachung ist ein verlustfreies Dielektrikum angenommen worden. Wellenwiderstand:
Z=~
Wellengeschwindigkeit:
v
Retlektionsfaktoren:
R-Z ru = R + Z
1
h·c·
(17-7)
in m
(17-8)
s
(17-9)
mit R = Abschlusswiderstand Eigenfrequenz :
mit I
= Kabellänge in Meter
(17-10)
Zur Untersuchung der möglichen We11enausbreitung wird in Abb. 17-14 das Umrichtersystern vereinfacht dargestellt.
. . 2· ~1
[. . . . . . . . . . . . . . . . . . . . . . ,
1"li.WRI
Ud
RA
Kabel~ZL
CAAI
ULLldl
~-------------------------------------------_:
Wechselrichter
ZWR
-:
Kabellänge I
ZM
Motor ZM
Abblldung 17-14 Einpolige Darstellung des Umrichter-Kabel-Motorsystcms
Für die in Tab. 17.3 angegebenen Daten folgt ein Wellenwiderstand von ZL = 91 0 und eine We11engeschwindigkeit v = 91287 kmls ~ 91 mll'S bzw. 10,9 nslm. Schalttlanken der Wechselrichterausgangsspannung uLL WR breiten sich mit der We11engeschwindigkeit v entlang der Kabellänge I aus. Daraus folgt eine SignallaufZeit /',/: . . _ Kabellänge ' digkeit SignallaufzeIt/',I - W e11engesch wm
=
I v
(17-11)
322
17 Leistungselektronik und EMV
Ist die Schaltzeit (Tr in Abb. 17-2) des Wechselrichters kleiner als diese Signallaufzeit M, so muss das Kabel als Wellenleiter betrachtet werden. In diesem Fall sollten Wechselrichter und Motor die Impedanz des Kabel-Wellenwiderstandes (Zr) aufweisen, damit es zu keinen Reflexionen auf der Motorleitung infolge Fehlanpassung kommt •
Die in der Nachrichtentechnik übliche Leistungsanpassung ist wegen des geringen Wirkungsgrades bei energietechnischen Anwendungen nicht möglich.
Praktisch ist die Impedanz des Wechselrichters (ZWRl durch den Zwischenkreiskondensator C für hochfrequente Komponenten annähernd Null. Die Induktivität des Motors führt zu einer vergleichsweise hohen Impedanz ZM. Die Reflexionsfaktoren für die Spannungsflanke lauten mit GI. (17-9) an den Wechselrichterklennnen ru ~ -I (-I '" Kurzschluss) und an den Motorklemmen ru~ I (I '" Leerlauf). Eine am Motor eintreffende Spannungsflanke läuft daher zum Wechselrichter zurück, wobei am Motor eine Spannungsverdopplung aufuitt. Der Wechselrichter spiegelt die Schaltflanke mit umgekehrten Vorzeichen zum Motor hin. Abb. 17-15 zeigt den idealisierten Spannungsverlauf entlang des Motorkabels und den Zeitverlauf der Spannung am Motor für einen Einschaltvorgang mit hoher Steilheit und ZWR « ZL «ZM. WR
Kabellänge I
U:~,'___~ __
Motor
·~i__..
Motorspannung:
l -______________
2· Ud rnnn ... n... n... n... n... n...;;;;
2
Ud: o ~,- - - - - - - - - - ' - _ + .
2.Ud!J
Ud
I ---------- ---------
lrul ~ I lrul< 1f----1
-j------- --------- ""
x v
Ud.
o
uIL,M
x
~--------------------~_..
I: Kabellänge zwischen WR - Motor
x
~~!--------~~~~-+. x
AbbUdung 17-15 Ausbreitung einer Spannungsflanke (idealisiert) zwischen Umrichter (WR) und Motor und Zeitverlauf der Leiterspannung uLL,M (Motorspannung)
Auf der Leitung können sich, abhängig von der Leitungslänge I und Schaltfrequenz fs des Wechselrichters, gleichzeitig mehrere hin- und rücklaufende Spannungsimpulse befinden. Ortsabhängig erfolgt dann eine Überlagerung (Superposition) verschiedener Spannungsimpulse. Im ungiinstigsten Falle findet diese Superposition direkt an den Motorklemmen statt, wodurch erhebliche Überspannungen hoher Steilheit am Motor auftreten. Abhilfe kann hier ein Wechsel der Schaltfrequenz oder ein zusätzliches duldt-Filter bringen.
17.3 Motoranpassung an den Stromrichter 17.3.3
323
AusgangsfIlter
Ausgangsfilter werden direkt am Ausgang des Wechselrichters angeordnet. Die Leitungen zwischen Wechselrichter und Filter sowie zwischen Filter und Motor werden im Allgemeinen geschirmt ausgeführt. Der Einsatz eines Ausgangsfilters sowie geschirmter Leitungen ist mit Kosten, Platz und zusätzlichem Gewicht verbunden. Man wird den Aufwand daher nur so groß wählen, wie es zur sicheren Funktion der jeweiligen Anlage und zur Einhaltung der jeweiligen Vorschriften unbedingt erforderlich ist. Man unterscheidet daher je nach Aufwand zwischen: Ausgangsdrosseln zur Verbesserung der Stromkurvenform, duldt-FiIter, Filter zur Begrenzung der Spannungssteilheit aufmax. 500 V/IIS, Sinn.fiIter, Filter zur Unterdrückung der Spannungsoberschwingungen. Die Filter sollen vom Kabel und Motor ausgehende elektromagnetische Störungen reduzieren und die Spannungskurvenform am Motor verbessern. Bestehende Umrichter lassen sich im Allgemeinen mit einer Drossel, einem duldt- oder Sinusfilter nachrüsten. Hierbei ist jedoch der zusätzliche Spannungsabfall zu beachten. Bei einer Drossel kann pauschal mit einem Spannungsabfall von bis zu 10 V, bei einem Sinusfilter von bis zu 60 V gerechnet werden. Ein Sinusfilter bietet nahezu sinusförmige Spannungen, stellt aber auch den größten Aufwand (Masse, Volumen) dar. Den typischen Aulhau eines duldt-Filters zeigt Abb. 17-16. Das du/dt-Filter befindet sich unmittelbar am Ausgang des Wechselrichters. Die Kombination eines duldt-Filters zusammen mit einer zusätzlichen Motordrossel ist möglich. [24]
+
WR
rI
=r=
UI
Cd Cd
LF
CF=
F := :=
VI
Schaltungsbeispiel für ein duldt-Filter
U2 V2 M
WI
-
1
Abblldung 17-16
Filter
W2 =
F := :=
J._._._._._._._.-.-._._._.PE ... _._._._._._._._.
Zur Dämpfung von asymmetrischen Slörströmen kann noch eine zusätzliche stromkompensierte Drossel zwischen Wechselrichter und Filter geschaltet werden.
PE
.. _._._.- ._._._._.-
Die Induktivität einer Filter-Drossel muss im gesamten Betriebsbereich konstant sein. Bedingt durch die mögliche Sättigung des magnetischen Kreises durch asymmetrische Störströme liegen damit fiir ein Filter Vorgaben fiir die Ausführung und Länge der Motorzuleitung sowie über die Anzahl parallelschaltbarer Motoren fest. In Abb. 17-17 ist dargestellt, welche Parameter sich bei Verlängerung der Motorleitung bzw. bei der Parallelschaltung von Motoren ändern. In jedem Fall nimmt die Erdkapazität - und damit der asymmetrische Störstrom - zu. Hier unterscheidet sich die Parallelschaltung der Motoren, bei der sich die Erdkapazität mit der Anzahl der Motoren erhöht, von einer Leitungsverlängerung, bei der sich neben der Erdkapazität auch die Leitungsinduktivität proportional zur Länge erhöht. Ein Ausgangsfilter arbeitet
324
17 Leistungselektronik und EMV
daher nur bis zu einer bestimmten Leitungslänge bzw. Anzahl parallel betriebener Motoren zufriedenstellend. Da die Leitungsverlegung Einfluss auf die Wirksamkeit der eingesetzten Filter hat, muss die Wirksamkeit der Filterung experimentell überprüft werden. Abb. 17-18 zeigt den Weg der Ladeströme der Leitungs- und Motorkspazität. Bei jedem Schaltvorgang fließt ein Ladestrom als asymmetrischer Störstrom i as über die Masseverbindungen. Das Filter F soll diesen Störstrom unterdrücken und die Spannungssteilheit vermindern. Zwischen Motorzuleitung und Masseverbindung darf keine resultierende Fläche existieren, d.h. die Leitungen müssen so nahe wie möglich zusammen verlegt werden.
(LA: Ader-Induktivität, CAS : Kapazität Ader-Schirm, CWG: Kapazität Wicklung-Gehäuse)
,..-----
Längere Motorleitung
U2 _. PE
+i~:~~A~:-lt""""'-+'I-'[hl ! '..
.~·········Z···I····;i~······I!·
U2
I
~I""""1
I ITcwJ
i.. CAST CAST PE • l....~......................._.............................i • !...................J Leitung, 2fache Länge Motor
!
T! !TCwG!
l....~ ........................; I...................; Leitung
U2
Motor
PE •
Parallelschaltung von Motoren
:i-"'·······;~""'-~:~IT··········+-+j'["...,....~·---,······~··..........j
...o--i'
!i.! .............................. ;
~
Leitung
!rw~ CWG!
•.................•.................;
2 Motoren
Abbildung 17-17 Beeinflussung des asymmetrischen Störstromes iss am Beispiel einer Motor-Phase
a)
b)
.....:
d)
Cd
'*'
!:L...9J
····················T··········;
"as
LA
·._ ..............................L
.v-1
.",T-.,
!: TCAS :! Tcwo Tl, :. Cd', ... ..:'u ia s:'T'~ CWG .CAS:.L . .........••
•• ___________________ . . __________ .L_________ .••
Ahbildung 17-18 Stromwege beim Umladen von Kabel- und Motorkapazität (p: Filter)
17.4
Weitere Maßnahmen
Man muss sich der Tatsache bewusst sein, dass eine Energieübertragung auch in leistungselektronischen Einrichtungen allein über elektromagnetische Felder erfolgt. Sämtliche strom- und spannungsfiihrenden Konstruktionseleroente (Kabel, Leitungen, ... ) dienen (nur) der Feldfiihrung. Mathematisch winl dieser Zusammenhang durch das Vektorprodukt von elektrischer Feldstärke g und magnetischer Feldstärke H, dem Poynting-Vektor S. nach GI. (17-12) beschrieben. Dieser Vektor beschreibt die Leistungsdichte in einero Raumpunkt.
S=EXH
.W
m m'
(17-12)
Abb. 17-19 zeigt beispie1haft zwei stromdurchflossene Leiter im Abstand d, zwischen denen die Spannung U herrscht.
17.4 Weitere Maßnahmen
325
Abbildung 17-19 Poynting-Vektor !i Das Potenzial spannungsfiihrender Teile wird durcb ideale Scbalter mit Steilheiten bis zu 20 kV/~s gesteuert. Ferner treten Stromänderungsgeschwindigkeiten bis ca. 1 kA/~s auf. Unter diesen Bedingungen kann sich das elektromagnetische Feld vom Leiter ablösen und als Radiowelle ausbreiten. Hierin liegt ein besonderes Problem beim
Einsatz moderner Bauelemente. Schirmung sowie Erdung müssen äußerst sorgfältig erfolgen.
Die übertragene Leistung P erhält man durch Integration der Leistungsdichte :i. über die Querschnittsfläche A des von den Leitern erzeugten elektromagnetischen Feldes.
P =
f S. A
dA
(17-13)
Zwar ist das elektromagnetische Feld immer vorhanden, bei geringen Betriebsfrequenzen oder Gleichgrößen tritt es im Allgemeinen nicht störend in Erscheinung. Durch hochdynarnische Schaltvorgänge in leistungselektronischen Einrichtungen machen sich störende Einflüsse zunehmend bemerkbar. Bei ungünstiger Anordnung von Komponenten, wie z. B. Sensoren, sind diese direkt dem hochfrequenten elektromagnetischen Feld ausgesetzt, d. h. sie werden kapazitiv und induktiv beeinflusst. Während sich eine kapazitive Beeinflussung bei Leitungen durch eine mehrfach geerdete Schirmung weitgehend ausschalten lässt, muss der Ableitstrom der Schirmung unschädlich abgeführt werden. Ein besonderes Problem besteht hier bei der Wicklungsisolation eines Motors. Verschiebungsströme durch hohe Spannungssteilheiten lassen die Isolation vorzeitig altem und verursachen Lagerströme, wodurch die Laufgüte und Lebensdauer der Kugellager reduziert wird. Die von Leitungen gespeicherte magnetische Energie muss bei Schaltvorgängen sehr schnell geändert werden. Hierbei können zerstörerische Überspannungen an den aktiven und passiven Bauelementen entstehen. Der Aufbau eines Stromrichters muss daher äußerst induktivitätsarm erfolgen. Hin- und Rückleiter sollten so eng wie möglich beieinander liegen, Leiter sind zu verdrillen oder als Schienen auszuführen. Nur durch diese Maßnahmen kann die Schaltleistung moderner Leistungshalbleiter überhaupt ausgeschöpft werden. Beim Aufbau einer Stromrichterschaltung bieten Halbleitennodule Vorteile, da durch die modulinterne Zusammenfassung und Verbindung mehrerer Halbleiter in einem Gehäuse auf eine externe Verbindung verzichtet werden kann. Die Energioübertragnng erfolgt im Idealfall nur zwischen den Stromschienen, also in einem sehr engen Spalt (d in Abb. 17-21). Bei gleichem Leiterquerschnitt haben eng aneinander liegende Stromschienen im Vergleich zu Runddrähten, je nach Seitenverhältnis eine bis zu 90 % reduzierte Induktivität. Bezieht man die Induktivität L auf die Länge I, so erhält man fiir parallele Runddrähte nach Abb. 17-20 die GI. (17-14) und fiir Stromschienen nach Abb. 17-21 die GI. (17-15).
326
17 Leistungselektronik und EMV
Runddrähte:
E..ln(2.~) in H
L
I
t
(17-14)
m
D
TI
Abbildung 17-20 3 ..................................... .
Iili. m
2 -
Uingenbezogene Induktivität voo parallelen Runddrähteo nach GI. (17-14)
Es gilt:
o1-----,---,--------,---1 5
10
d
->I D
50 100 dlD-
Verschienung: L
2·E.·ln(1
I
TI
+
I
H
a) in m I + b
~-----::..-'-b
t
d«b und d«a
Abbildung 17-21 0,3
Uingenbezogeoe InduktivitätL nach GI. (17-15) voo parallelen Stromschienen
Iili m
(17-15)
0,2
0,1
(a·b ~ konstant)
o f - - ' I----,----,----'''1 I
5
10
50 100 a/b-
Hinweis: Der effektive Leiterquerschnitt wird durch die frequenzabhängige Strom-Eindringtiefe I) beschrieben. Bei der Eindringtiefe I) ist die Stromdichte im Leiter auf ein e-tel (~37 %) abgefallen. Die Eindringtiefe I) berechnet sich nach GI. (l7-16) (Skin-Effekt, [26]). ö _
~
-
2 "'!-10
w = 2TIf I.L : magnetische Permeabiltät des Leiters CI : elektrische Leitflihigkeit des Leiters
(17-16)
Für einen langen runden Kupferleiter ergibt sich z. B. bei einer Frequenz vonf= 50 Hz eine Eindringtiefe von I) ~ 9,5 mm, bei I MHz beträgt I) nur noch 67 !-Im.
327
18 Gleichspannungswandler Zur Anpassung einer Spannungsquelle an einen Verbraucher mit geringerer Spannung kann man einen einfachen Spannungsteiler verwenden. Wegen des ungünstigen Wirkungsgrades ist diese Maßuahrue jedoch auf kleine Leistungen beschränkt. Legt man Wert auf einen hohen Wirkungsgrad, was besonders bei batteriebetriebenen Geräten der Fall ist, oder benötigt man höhere Leistungen, so erfolgt die Spannungswandlung durch periodisch schaltende Wandler. Als Schalter kommen fiir Leistungen bis ca. I kW iro Allgemeinen MOSFET-Leistungstransistoren zum Einsatz. MOSFETs ermöglichen Schaltfrequenzen »100 kHz. Die komplette Baueinheit eines schaltenden Spannungswandlers wird als Gleichspallllullgswandler bezeichnet. Nachfolgend werden die verschiedenen Prinzipien der Wandlerschaltungen vorgestellt.
18.1
TiefsetzsteUer u2 U\
U2 =8' Ul s~1
-
s~O
o
~ttelwertJ TE
f-
U2 t
-T
Abbildung 18-1 Prinzip des Tiefsetzstellers
Das Prinzip eines schaltenden Spannungswandler zeigt Abb. 18-1 am Beispiel des Tiefsetzstellers. Der Schalter S stellt am Ausgang der Schaltung eine pulsierende Gleichspannung U2 zur Verfiigung. Der Schalter S arbeitet periodisch mit der Periodendauer T und wird mit der Schaltfunktion s beschrieben (siehe Tabelle 13-1), die Einschaltzeit ist mit TE angegeben. Die Spannung U2 wechselt mit der Schaltfunktion s zwischen u\ (s ~ I) und 0 (s ~ 0). Die Gleichspannung U2 erhält man als zeitlichen Mittelwert von U2 nach GI. (18-1).
TE mit: Aussteuerung a ~ T
18.2
(18-1)
Ausitihrungsbeispiel zum TiefsetzsteUer Abbildung 18-2
---, iD
S
T
D
Schaltermodell und praktische Ausfiihrung des Umschalters mit Transistor und Freilaufiliode fiir i2 ::" 0
In der Praxis treten parasitäre Induktivitäten auf, die fiir die Funktion der Schaltung berücksichtigt werden müssen. Man kann von I nHImm Leiterlänge ausgehen. Nachfolgende Schaltung zeigt Induktivitäten auf der Gleichspannungsseite, iro Transistor und in der Diode. J. Specovius, Grundkurs Leistungselektronik, DOI 10.1007/978-3-8348-8270-7_18, © Vieweg+Teubner Verlag | Springer Fachmedien Wiesbaden GmbH 2011
18 Gleichspannungswandler
328
Berücksichtigung parasitärer Induktivitäten:
La : Leitungsinduktivität (I IlH I m) LT: Emitterinduktivität (10--20 nH) LD : Diodeninduktivität (5-10 nH)
a)
c)
b)
iD iD
h
Die graue Fläche soll so klein wie möglich ausfalleo! T sperrt, die Freilaufdiode D leitet, U2 "0.
T schaltet ein, i2 wird langsam von T übernommen. Die max. Stromsteilheit ist durch rL im Stromkreis bestionnt.
SiC-Diode
~\ S~Diode
IRM*
0/
t
Die Rückstromspitze I RM der Freilaufdiode D belastet deo Transistor zusätzlieh. Der Stromabriss erzeugt Überspaonungen.
Zur Senkung der Schaltverluste und Vermeidung von Überspannungen ist zu beachten: •
Ein zusätzlicher Kondensator C unmittelbar arn Kollektoranschluss des Transistors T zur Kompensation eingangsseitiger Leitungsinduktivitäten (La)'
•
Der Transistor T und die Diode D sind so eng wie möglich beieinander anzuordnen, besser verwendet man ein Modul zur Vermeidung unnötiger Verdrahtungsinduktivitäten.
•
Die Leitungen zwischen Kondensator C und Diode D sind als großflächige, enge Schienenpaare auszufiihren damit die aufgespannte Fläche (in b) grau dargestellt) minimal ist.
Besonders kritisch ist das Abschaltverhalten der Freilaufdiode D. Die Dioden-Rückstromspitze iRM muss vom Transistor T geschaltet werden und verursacht hohe Schaltverluste. Hierdurch wird die Schaltfrequenz begrenzt. Bei der Dioden-Auswahl muss daher besonders auf iRM geachtet werden. Es gibt seit einiger Zeit SiC-Dioden, die sich hinsichtlich der geringen Rückstromspitze sehr gut fiir diese Anwendungen eiguen (c) und hohe Schaltfrequenzen zulassen. Derzeit ist aber nur ein SiC-Diodentyp im Handel (siehe Tab. 5.1).
18.3
GleichstromsteUer Abbildung 18-3 Gleichstromsteller mit passiver Last D: Freilaufdiode
L: Glättungsinduktivität
Wendet man den Tiefsetzsteller auf eine ohmsch induktive Last art, so kann mit dem Schalter S in der Schaltung nach Abb. 18-3 der Gleichstrom id gesteuert werden. Diese Schaltung ist durch zwei Arbeitstakte des Schalters S gekennzeichnet. Ist der Schalter S geschlossen (Stel-
18.3 Gleichstromsteller
329
1ung 1 in Abb. 18-1), so wird der Gleichstrom id von Uo aufgebaut. Der Gleichstrom id wird beim ersten Schaltvorgang durch G1. (18-2) beschrieben.
. Uo L mtt: 10 = R und T = R
(18-2)
Den Gleichstromverlauf zeigt Abb. 18-5. Wird der Schalter S bei 1 = 11 geöffnet (Stellung 0 in Abb. 18-1), so fließt der Strom id über die Freilaufdiode D und die Spannung "2 ist Nul1. Der Gleichstrom id fällt nach G1. (18-4) vom Aufangswert lt ausgehend auf Null ab. Durch Wiedereinschalten von S bei 1 = 12 kann id nach G1. (18-4) wieder aufgebaut werden. Bei 13 wird der Schalter wieder geöffnet. (18-3)
(18-4) Der Gleichstrom id verläuft exponentiell zwischen den Grenzwerten 11 und h. Die Differenz
lt - h wird als Schwankungsbreite t.id bezeichnet.
(18-5) Die Zustiinde (Aufladen (s = 1) und Entladen (s = 0) der Speicherdrossel L) zeigt Abb. 18-4. Arbeitstakt: Aufladen, "2 = Uo, S = 1
Arbeitstakt: Entladen, "2 = 0, S = 0
Abblldung 184 Arbeitstakte eines Gleicbstromstellers
u, i "2
11
1 S=l Is=o 1 --
-- -- --,------,--- --------------------
..
Abblldung 18-5 S1romverlauf eines Gleichstromstellers mit passiver Last (TL < 1)
330
18 Gleichspannungswandler
Zur Bestimmung der Schwankungsbreite Aid wird h und 12 (oberer und unterer Grenzwert des Gleichstromes iM berechnet. Mit der Ausschaltzeit TA ~ T - TE folgt: TE
TE
I 1 = 10 (1 - e ~)
+
12 e ~
(18-6)
Durch Eiusetzen von lz formt sich GI. (18-6) um: TE
I1
=
10 ( 1 - e
~)
T
+ I 1e
(18-7)
~
Aus GI. (18-6) und (18-7) folgt fiir die Grenzwerte hund lz: TE
1- e
T ~
'T
10
1- e
1 ,-e----e'-;T::0
und
T
~
1 -e
'T
(18-8)
T
Die Eiuführung der Aussteuerung a liefert mit TE ~ a Tund TA ~ (1 - a) Tschließlich für die Schwankungsbreite Aid : aT
Aid(a) = 10
-(I-a)1: T 'T+eT
l-eT-e
T
1- e ~ Den Verlauf von Md iu Abhängigkeit von der Aussteuerung a zeigt Abb. 18-6 iu normierter Form für konstante Schaltfrequenzfs bei nicht lückendem Strom. Bei a ~ 0,5 ist Md maximal, so dass dieser Aussteuerungswert Grundlage fiir eine Dimensionierung der Induktivität List.
t
Die maximale Schwankungsbreite Md wird um so kleiuer, je größer die Lastzeitkonstante t im Verhältnis zur Periodendauer der Schaltfrequenz T ist.
0,25 0,2
0,1
° Abbildung
18~
0,2
0,4
0,6
0,8 a
•
Schwankungsbreite Aid bei unterschiedlicher Schaltfrequenz fs
1
Der Glättnngsaufwand reduziert sich daher mit zunehmender Schaltfrequenzfs· Bei der Schaltungsentwicklung wird stets eiu Kompromiss zwischen den Schaltverlusteu des Schalters S, dem Abschaltverhalten der Freilaufdiode D und der Baugröße der Glättnngsmittel gesucht.
18.4 Gleichstromsteller mit aktiver Last
18.4
331
GleichstromsteUer mit aktiver Last
Als aktive Last wird eine Gleichstrommaschine angenommen. Es wird zwischen lückendem und nichtlückendem Betrieb unterschieden.
Laden (0 < I< (1)
-
..., Uo
i
S
j( )
L
~D
R
(
)1_
Uo
j(D
-
e
T
-
--
uL
id = id(/l)e
DP ( DIL
U2! L t-
L)
id
--------
S
t
= _0_(1 R
id ~
L
U21
U -e
d
ur.
........
Entladen (lI < I < (2)
t-
1 1
TL
R
- ~ (1 - e
1
1
TL )
R
"2=0
"2= Uo
Mit jedem Einschaltvorgang wird die Drossel L aufgeladen (positive Spannungszeitfläche in Abb. 18-7), bei geöffnetem Schalter wird die Energie wieder abgegeben (negative Spannungszeitfläche in Abb. 18-7). Der Gleichstromverlauf entspricht prinzipiell Abb. 18-17. Ist die Drossel jedoch entladen (i2 = 0), bevor der Schalter bei 1 = 12 wieder geschlossen wird, so bleibt der Gleichstrom bis zum Einschaltvorgang (bei (2) 0, man sagt, der Strom lüc1ct. Der Zeitpunkt ist in Abb. 18-7 mit IL gekennzeichnet. Im Lückbetrieb ist die Gleichspannung "2 gleich der Gegenspannung e. Zur Venneidung dieses Lückbetriebes ist die Taktfrequenz anzuheben (kürzere Entladezeit), die Induktivität L zu vergrößern oder ein höherer Mittelwert Id erforderlich. Speziell im Leerlautbetrieb einer Gleichstrommaschine, d. h. bei fehlendem Lastmoment, kann daher ein Lückbetrieb auftreten. Im Lückbetrieb setzt sich die Ausschaltzeit TA aus TA' (D leitet) und TA" (stromlose Pause) zusammen.
- 10
Freilsufdiode
~~
t j
I te I {o
TE
p
r--.-
p
Abbildung 18-7 Lückbetrieb, Strom und Spannung der Speicherdrossel
I
1
332
18 Gleichspannungswandler
Wird die Tiefsetzstellerschaltung nach Abb. 18-3 um einen Schslter (SG) und eine Diode (DG) erweitert, so kann der Gleichstromsteller auch fiir die Energierückspeisung eingesetzt werden. Die im Bremsbetrieb des Motors anfallende generatorisehe Energie kann in das Gleichstromnetz zurückgespeist werden. Der Gleichstromsteller erhält dadurch den bereits in Abb. 4-60 vorgestellten Briickenzweig. Im motorischen Betrieb wird die Schaltung als normaler Gleichstromsteller betrieben, SM taktet, SG bleibt gesperrt, die Diode DG ist stromlos. Im generatorisehen Betrieb wird nur SG getaktet, SM bleibt gesperrt.
• •
Ist SG geschlossen, so wird von der Motorspannung e in der Drossel ein Gleichstrom in negativer Richtung aufgebaut. Wird anschließend der Schalter SG geöffnet, so fließt id von der in der Drossel gespeicherten Energie getrieben zurück in die Gleichspannungsquelle. Die Spannung an der Induktivität addiert sich zu e, so dass "2 auf Uo angehoben ist. Die Schaltung arbeitet dann als Gleichspannungs-Hochsetzsteller. Die Energierichtung ist durch den negativen Gleichstrom umgekehrt. Abb. 18-9 zeigt die beiden Arbeitstakte im Rückspeisebetrieb. Brückenzweig
,··········································V
'DG
U. )
,Lid
[;';1 '"~) V1
......
U·)f
L
f- S L~ G ~
I'1
Index M: Motorbetrieb
~e
.------------------------------. DG
Rückspeisefähiger Gleichstromsteller
R
n. '".
id
R
r\ ) ~
Abbildung 180S
Index G: Generatorbe1rieb
DG blockiert, der Eingangsstrom ist unterbrochen, die Rotationsspannung e treibt einen Strom riickwärts durch die Drossel L. Dabei wird ein Teil der generatorisehen Energie in R in Wärme umgesetzt, der andere Teil in der Induktivität L gespeichert
(W ~ 1/2 L ii).
L aufladen
DG
.-4
L
~
Uo
1--T
I c f-
LI'
I
SG
1
id
R
'( )
je
Nach dem Öffnen von SG fließt der durch L eingeprägte Motorstrom nun über die Diode DG in das Gleichspannungsnetz. Die erforderliehe Spannungsanhebung auf Uo erfolgt durch die in L induzierte Spannung. Für den Fall, dass die Batterie nicht mebr aufuahmefähig ist, muss zusätzlich ein "Bremswiderstand" parallel zu SG vorgesehen werden.
Rückspeisung Abbildung 18-9 Rückspeisebetrieb des Gleichstromstellers
18.5 Lückbetrieb
18.5
333
Lückbetrieb
hn folgenden wird der Einfluss des Lückbetriebes auf die Ausgangsspannung des TiefsetzsteIlers mit aktiver Last nach Abb. 18-10 beschrieben. Abbildung 18-10 Tiefsetzsteller mit aktiver Last
Bei Berücksichtigung des Lückbetriebes treten insgesamt drei Betriebszustände auf:
während TE (laden, S leitet, D sperrt)
während TA" (lücken, S und D sperrt)
während TA' (entladen, S sperrt, D leitet)
. . . . . . _,. 4 . \
-
r
~, ~u, t
t
L:):i ...
: +.,:
~.......... ,
t
t Abblldung 1&-11 Betriebszuslände des Tiefsetzstellers im Lückbetrieb
Für den Lückbetrieb ist das Spannungsverhältnis U;/U, zu ermitteln. Dazu erfolgt zunächst die Berechnung der Stromhöhe I!.iL fiir den steigenden und fallenden Strom im Lückbetrieb. Die Stromhöhe !J.iL berechnet sich nach GI. (18-10) aus der an der Induktivität L liegenden Spannung "L' Die Ausschaltzeit des Transistors TA wird im Lückbetrieb in zwei Abschnitte unterteilt. Während TA' leitet die Diode, während TA" sperrt die Diode und der Strom ist Null. Es gilt: TA' + TA" = TA sowie TA + TE = Ts.
334
18 Gleichspannungswandler
mit
T '
mit
(18-10)
a'=~ Ts
Die Division der beiden ML-Beziehungen nach GI. (18-10) fiihrt auf einen Ausdruck fiir a':
=
U!
a
(--1)U2 a'
(18-11)
a'= Mit GI. (18-11) berechnet sich der Mittelwert des lückenden Stromes
_
'2 zu:
U! Ai 2 TE+T A ' Ai2 Ai 2 Ai2 U! )=-(a+a')=-(a+a(--l))=-a2 Ts 2 2 U2 2 U2
i =-( 2
(18-12)
Ersetzt man schließlich M2 durch G1. (18-10) für steigenden Strom, so folgt:
Ts U! a 2L (U! - U 2)'a U
2
=
a
2TSU!(U!-U2) U
---u:-
(18-13)
2
GI. (18-13) kann durch den iu G1. (18-14) ermittelten Maximalwert Ai2,max für TE = Tsl2 weilässt sich dann mit GI. (18-15) al1gemeiu berechnen.
ter vereiufacht werden. Der Mittelwert
'2
. U! - U 2 Aus A'2= L TE Ai 2 =
U!T S
-L-
(18-14)
a(1 - a)
2 U! 2Ai2,max a (U- -1)
(18-15)
2
Durch Umstellen von G1. (18-15) folgt die Spannungsgleichung für den Lückbetrieb: für
Ai 2,max 2
(18-16)
SeId IIIIID 12 - ~ /2 ein, tu c:obilt IIIIID mit 01. (18-17) die Betrieb deI TiefJetzIte11en an der Iiickgratze:
u,
I
U,
1+-
'"
Spemmwcidlunr fIlr den
I
(18-17)
,..'
,
!u,
•,
u,
• , ,
"~
",
,
,
, , , , ,
,
",--....
,
-
\.
"-/ /'
I
, ,
""d. ., L.l!..... !
'c , D==
I
..., ----- ---- ...,
~ '-.....
~"
o.~
0 .1 0 .1 0 .] 0 _' 0 .' 0 _" 0 .1 0 ." 0 .'
,
,-
im J/IeWendm UIId nichtlOckwnd"" BeIriob ImLllokbcbi!:bilt4ie Spanmma U, rImIlIII>-
hiDIiIr: mbiibI.
1.1 1-" L3 U
U
r,~lr.~n~·;~zt·" :
i ....-+... i
;;V~
! : ;;!iZ~ i--- TE-i
»
»
-
L
!~ i%~
Im liiekftdcn Betrieb Qt
, ",,
f.>-
LIIctiooI.1eb, TB
fnrU:z _ _
•
die A1I'II""P"Pmrnmll Ul 1l1li" ilx:r d.ic AulIsteuc:rung IJ I»-
Im LOckbetrieb verIDdem lieh die SpamIlllglWlhlltDil Ul iIt diam lUCb. _ _
Hiilu: deI OkidIt\roJJa -bhingill
336
18.6
18 Gleichspannungswandler
HochsetzsteUer
Soll die Ausgangsspannung U2 größer als die Eingangsspannung Uo sein, so wird in Abb. 18-14 mit Hilfe eines induktiven Energiespeichers L eine zusätzliche Spannung bereitgestellt, deren Wert sich zur Eingangsspannung Uo addiert. Dabei gibt es wieder einen Arbeitstakt zum Aufladen der lnduktivität und einen Arbeitstakt zum Entladen der lnduktivität. Am Ausgang bildet ein Kondensator C den Mittelwert der Spannung. Der Kondensator C wird über eine (Boost-)Diode gegen Entladung durch den Schalter geschü1zt. Die Ausgangsspannung Ud ist bei dieser Schaltung mindestens gleich der Eingangsspannung Uo. Zur Vereinfachung ist die Speicherdrossel L verlustfrei angenommen.
L: Speicherdrosse1 D: Boost-Diode C: Glättungskondensator
L
ud;:" U o
Arbeitstakt: Aufladen von L,
U2 =
0
Arbeitstakt: Entladen von L, u2 =
Ud
.............
uoj() LU2j~ Abbildung 18-14 Hochsetzstcller
Die Spannungs- und Stromverläufe der Speicherdrosse1 L zeigt Abb. 18-15. Der Mittelwert von i L ist so groß gewählt, dass kein Stromlücken auftreten kann. Die Kondensatoren sind so groß, dass Ud annähernd konstant ist und durch den Mittelwert Ud erse1zt werden kann.
iL
uL
Uo
Uo UO-Ud
t
TE T Laden
Entladen
Abbildung 18-15 Die Größen der Speicherdrossel bei unterschiedlichen Ausgaogsspannungen
t
18.7 Hoch-Tiefsetzsteller
337
Die Schwankungsbreite des Stromes iL lässt sich für den Lade- und Entladevorgang dann mit Gl. (18-18) beschreiben. (18-18) Durch Umformung folgt Gl. (18-19) für die Ausgangsspannung Ud'
1
.
nnt
Ud = U o' - -
1-a
18.7
TE
(18-19)
a =T
Hoch-TiefsetzsteUer
Damit die Ausgangsspannung auch für kleinere Werte als Uo eingestellt werden kann, muss die Hochsetzstellerschaltung entsprechend Abb. 18-16 abgeändert werden. Diese Schaltung erlaubt die Ausgangsspannung von 0 V an einzustellen. Wegen der gegenüber dem Hochsetzsteller geänderten Anordnung der Bauelemente ist die Ausgangsspannung jedoch invertiert. Ein typisches Anwendungsgebiet sind akkubetriebene Geräte, um die bei Lade- und Entladevorgängen schwankende Gleichspannung auszugleichen.
Uo j(
D
--
/1
I""
S
L
L: Speicherdrossel
-
D : : c l ud
i Arbeitstakt: Aufladen, u2 ~ U o
)
'd
...,
C: Glättungskondensator D: Boost-Diode
--
Arbeitstakt: Entladen, S
I""
S
Uol (
.
D
U21! L i
:~CfUd.
Abbildung 18-16lnvertiereuder Wandler
'd
uol (
u2 ~ -Ud ,'-'
D U21 ii LD::cfUd.
'd
Abb. 18-17 zeigt die Spannungs- und Stromverläufe der Speicherdrossel L für zwei unterschiedliche Ausgangsspannungen. Die Spannung u2 liegt unmittelbar an der Induktivität L und entspricht der Spannung uL in Abb. 18-14. •
Da der Energiefluss bei offenem Schalter S erfolgt, arbeitet diese Schaltung nach dem Prinzip des Sperrwandlers.
Die Schwankungsbreite des Stromes iL lässt sich für den Lade- und Entladevorgang bei idealer Glättung der Ausgangsspannung Ud, nicht lückendem Strom iL und verlustfreier Induktivität L mit Gl. (18-20) beschreiben.
338
18 Gleichspannungswandler
b)
Ud =-2
Uo
iL _=----------,r---. i L ... ···r···········
uL
i
Uo
Uo t
t
T-----I Laden I
Entladen
Abbildung 18-17 Strom- und Spannungsvcrlauf der Induktivität L
Durch Umformung folgt GI. (18-21) für die Ausgangsspannung Ud.
a
Ud=U.-o l-a
t
. TE mlt a-
(18-21)
-T
3
Abbildung 18-18 Normierte Darstellung der Ausgangsspannungen 1: Tiefsetzsteller
2: Hochsetzsteller 3: Hoch-Tiefsetzsteller
1
I
°
0,25
0,5
Aussteuerung:
1
0,75
a-
339
18.8 Sperrwandler
18.8
Sperrwandler
Führt man die Speicherdrossel L in der Schaltung nach Abb. 18-16 mit 2 Wicklungen aus, so arlJeitet sie als Speichertransformator T, und man erhält deo Sperrwandler nach Abb. 18-19. Beim Sperrwandler ist für jeden Arbeitstakt eine Wicklung vorgesehen. Die Primärwicklung NI dient zum Aufladen der Induktivität LI> die Sekundärwicklung N2 dient zum Entladen. Somit sind beide Wicklungen nur abwechseInd stromfiihrend. Die Schaltung ist nicht leerlauffest. Die magnetische Kopplung der Spulen des Speichertransformators sollte ideal sein, damit es bei Schaltvorgängen nicht zu unerwünschten Überspannungen durch die Streuinduktivitäten kommt. Durch die galvanisch getrennten Wicklungen steht eine potenzialfreie Gleichspannung zur Verfügung. Durch zusätzliche Sekundärwicklungen können weitere potenzialfreie Gleichspannungen generiert werden, deren Spannungsverhältnis über das Windungszablenverhältnis der Sekundärwicklungen bestimmt ist. In Abb. 18-19b sind die Ströme und Spannungen des Speichertransformators T dargestellt. Die Höhe der Schalterspannung Us ist vom Windungszahlenverhältnis mitbestimmt. Anwendungsbereiche des Sperrwandler sind z. B. Kfz-Zündanlagen, die Energiesparlampe oder ein Pe-Netztei!.
-
a)
b)
Us
-----, S NI •
UO! (
D
UI!
T
:! i '.
C
U2:~
R
il i T'2 D
t
TE
2
2
I
I,AV
Ausgangsspannung:
U o TE L 2T I s
=--
Ud = ~Uo'II,Av'R
- .. t T
S
uo! ( )
ul
id Arbeitstakt: Aufladen
•
•
t
N2
I I
Ud;1
2
l
U'II I
I
, t
Uo
• t
I
N
2 uON I
• t
Strom- und Spannungsverlauf des Speichertrafos ~.
,
. i20/' D
~ !
;n I.
NI Schalterspannung(AUS): Us = U o - U2'Jr
T •
t;::;NI~
i2
Ud
(.: Wicklungsanfang)
Eingangsstrom:
28. J~~:~: Al!.~. . . ..
.N2
u2: :
c
!
Ud
-----,
ul
~ i
i, i
l'
Arbeitstakt: Entladen
Abbildung 18-19 Sperrwandler (idealisiert, Betrieb an der Lückgrenze,
~
• Ji2~D
S
uo!( )
T
Ud konstant)
t
u2 :
~
!
Ud
c
340
18.9
18 Gleichspannungswandler
Durchflusswandler
Beim Schsltungskonzept des Durchflusswandlers nach Abb. 18-20 dient der Transformator Tr nicht als Energiespeicher wie beim Tiefsetzsteller, sondern nur zur Potenzialtrennung und der Spannungsanpassung. Zur Venneidung der magnetischen Sättigung des Trafo-Eisenkerns ist jedoch eine zusätzliche Wicklung fiir die Entmagnetisierung erforderlich. Bei abgeschsltetern Transistor T fließt der Magnetisierungsstrom über die Diode D 3 zurück in den Eingangskondensator CE und baut die magnetische Energie im Trafokern ab. Im Stromnulldurchgang ist die magnetische Energie im Transformator abgebaut und D 3 sperrt. iD3 Tr iDl Dl iLS
D3 iT UE
1
CE TJ
) Us
D2
Ls
CA iD2
Abbildung 18-20 Durchflusswandler
~UA
RL
) UDS
Wenn T eingeschaltet ist, wird Energie auf die Sekundärseite übertragen. Schaltet Tab, so sperrt D 1 und die Energieübertragung ist beendet. Die Entmagnetisierung von Tr erfulgt über D3' iLS fließt über D2 weiter. • Der Transformator Tr wird mit einem magnetischen Gleichfeld beansprucht.
Abbildung 18-21
UDS
t
Ströme und Spannungen des Durchflusswandlers ill : Magnetisierungsstrom
t t iOl
t
t t
t Wird in der Schaltung nach Abb. 18-20 die Diode D3 durch einen weiteren Transistor (TI) ersetzt, so kann der Primärstrom auch seine Polarität wechseln, wodurch der Kern mit einem magnetischen Wechselfeld belastet ist. In diesem Fall werden beide Transistoren im Gegentakt betrieben, weshalb dieser Wandler nach Abb. 18-22 auch als Gegentaktwandler bezeichnet wird. Auf der Sekundärseite findet über eine Mittelpunktschaltung bei jedem Arbeitstakt eine Energieübertragung statt. Bei symmetrischer Steuerung der Transistoren Tl und T2 kann sich kein magnetischer Gleichfluss im Kern entwickeln, und eine Sättigung wird vennieden. Der Transfonnator Tr ist besser ausgenutzt als beim Durchflusswandler, so dass bei gleicher Transformator-Baugröße mit dem Gegentaktwandler höhere Leistungen realisierbar sind.
18.10 Schaltnetzteile
341 Tr
Abblldung 18-22 Gegentaktwandler Die Gleichrichtung erfolgt wegen der
D4 Ls '-H>I---' iD4
r".
geringen Durchlassvcrlustc mit einer
RL UJ>S2
Mittelpuoktschaltung (D3' D.)
CA
Der Transfonnator wird mit einem Wechselfeld beansprucht.
Tl D1 T2 D2
Abblldung 18-23 Ströme uod Spanuuogen des Gegentaktwandlers
t UDSl
t
Beide Transistoren arbeiten im Gegentakt uod habeo gleiche Einschaltzeiten. Ts: Periodeodauer der Schalt-
frequenz eines Transistors
iTl,2 ~--~--~--~--~--~--~--~-t~
t iD4
t
t
18.10
Schaltnetzteile
Aus Gründen der Betriebssicherheit wird von Netzteilen im Allgemeinen eine Potenzialtrennung gefordert. Den Aufbau eines einfachen linear geregelten AC-DC-Netzteiles mit Eingangstransformator zeigt Abb. 18-24. Der Stelltransistor T steuert die Ausgangsspannung UA nach dem Prinzip eines ohmschen Spannungsteilers. Die Spannungsdifferenz AU = UE - UA fiillt arn Stelltransistor T ab und wird in Wärme umgewandelt. Netzteile mit linearen Stellgliedem haben daher stets einen schlechten Wirkungsgrad. Abhilfe schafft da ein getaktetes Netzgerät. Tauscht man in Abb. 18-24 den linearen Spannungsregler z. B. gegen einen getakteten Tiefsetzsteller nach Abb. 18-2 aus, so erhält man ein Schaltnetzteil. Da sich der getaktete Spannungsregler auf der Sekundärseite des Transformators Tr befindet, bezeichnet man diese Schaltnng als sekundärseitig getaktetes Schaltnetzteil.
342
18 Gleichspannungswandler
Tr
G
linearer Spannungsregler
Abbildung 18-24 AC-DC-Wandler (Netzteil) mit linearem Spannungsregler
18.10.1
Sekundär getaktetes Netzteil (AC-DC-Wandler)
Das Beispiel eines sekundär getakteten Schsltnetzteiles, bestehend aus Transformator Tr (potenzialtrennung und Spannungsanpassung), ungesteuertem Gleicbrichter G und Tiefsetzsteller zeigt Abb.18-25. Der Transformator Tr ist für die Netzfrequenzjj auszulegen. Tiefsetzsteller
Tr
G
············'f···············Ls········1
Abbildung 18-25 AC-DC-Wandlermit sekundärer Taktung (Tiefsetzsteller)
-*+ D • ___________________________________________ J
Der Transistor T wird als Schslter betrieben, so dass nur die Verluste des Schalterbetriebes (Durchlass- und Schaltverluste) entstehen. Die Differenz von Ein- und Ausgangsspannung wird nicht in Wärme umgewandelt. Ein getaktetes Netzteil hat einen hohen Wirkungsgrad.
18.10.2
Primär getaktetes Netzteil (AC-DC-Wandler)
Bei primärer Taktung erfolgt die transformatorisehe Potenzialtrennung mit der hohen Schsltfrequenz Is. Dazu formt z. B. ein Sperrwandler die gleichgerichtete Wechselspannung mit der Taktfrequenz/s um. Durch die im Vergleich zur Netzfrequenz jj hohe Schsltfrequenz erhält man wesentlich kleinere und leichtere Transformatoren als bei den sekundär getakteten SchsltAbbildung 18-26 ACDC-Wandler mit primärer Taktung
(Sperrwandler)
netzteilen. Auf der Sekundärseite erfolgt mit D, die Gleicbrichtung der hochfrequenten Wechselspannung mit anschließender Glättung. Die primäre Taktung ist für primäre Gleich- und Wechselspannungsnetze gleichermaßen geeignet (Universalnetzteil). Durch den Einsatz unterschiedlicher Wandlertypen existiert eine große Anzahl von Schsltungsvarianten [21].
18.10 Sehaltnetzteile
18.10.3
343
ElektrooDeher TraDJformator (AC-AC-WlUldler)
Verzichtet man in der Gegentaktwandlersc:haltung nach Abb. 18-21 auf die sckundlirscitige Gleichrichtung und werden die primlrscitigen Schalttransistoren im Gegentakt geschaltet, 110 steht am AmIgang eine hochftcquente Wecll!Iebpanmmg"s nach Abb. 18-27b zur Verfagung. Der Scheitelwert dieser WechselspBmL1lDg folgt der Kurvenform der NetzspBmL1lDg !IN und ist mit dem ~tnis des TraIIlIfoIIllldurll sblicrt. DeIartige SclJaHnetzteil. werden all ek/ctroItischo 'l'rtuJsftmnatw bezeichnet und häufig für Bekuchtungszweeke als 230 VlI2 V-Transformator eingesetzt. Wegen da-hoch:ftequenten Spannung"s sind für die Leitungsverlcgung besondere Richtlinien ZU beachten Speziell für Be1euchtungszweck werden die Niedervoltleitlmgen daher zur Venneidung von emv-ProbIcmcn fertig konfektioniert geliefert. Abb. 18-27& zeigt den Verlauf der NetDpanmmg !IN, deI!I llinganpstromea ~. Abb. 18-27b zeigt in gede\mtem Maßstab die Ausgangsgrößen "s und Es eines hmdelJl1h1ichen 100 WNetzgerites. Der Netutrom iN ist durch ein Ejngangsfilter geglättet. Die Periodendauer daAusgangsspannung "s ~ ca. SO JlS ents~cmd einer Schaltfrequenz von 20 kHz. Die Amplitude von"s folgt dem sinusftirmigen Vedaufda- SO Hz-Netztpmmung UN (Us - 12 V) .
•
)
b) I
LJ ~
l.,.--
• PaIsgleicluichter Im Folgenden IIOll verdeutlicht werden, wie der Gleichspamrungl-Hochse1meller nach Abb. 18-14 ZIDD. Wechselspsnnunga-Pulsgleichrichter mit 4-Quadrantenbe1rieb und einstellbarem coa ("') umgebBUt werden kann. Das gleiche Prinzip wird auch bei Drcllstromscllloltungen angewendet und dort als Aetive Frcmt End (APE) bczcielmct. Beim AFE cntfillt wegen da- 3phasigen Einllpeisung im Zwiscllenkreis die Wecllsels1romkomponente 2-faeher Ne1z:frequenz (IN). Das Grundprinzip der aldiven PFC-Schaltung wurde ~ts in Kap. 10.2.2.2 mit den Zeigerdiagrammen da- Netzgrö&n vorgestellt. 18.10.4
Dnreh die schaltende Arbeitsweise 1Ieten S1rom-Obemchwingungen au( die insbesondere bei geringen Takdi-equenzen Is eine Beachtung (Filter) c:rfordem. Im Frequenzspektrum liegen diese Oberschwingungen bei den F'requenzeniinach OL (18-22). (vgL Abb. 15-5).
I1
-
m-fs
± n·/N mit m-l,2,3 ... und n-I,2
(18-22)
In Abb. 18-29 ist der S1romver1auf für einen 3-phasigen Pulsglcichrichter mit ll-fach-Taktung am SO Hz-Netz dargestellt (fs = 11·50 Hz = 550 Hz).
344
18 Gleichspannungswandler
I) Hochsetzsteller
Hochsetzsteller für Gleichspannung. Die Speicherdrossel Ls befindet sich auf der Gleichstromseite, die Aufladung von L s erfolgt durch Uo (Kurzschluss). Es gilt:
Ls R
Ud>UO
2) Pulsgleichrichter
R
3) Pulsgleichrichter
R
Wie unter 2), aber L s liegt auf der Wechselstromseite (AC-Drossel). Die 2 Schalter arbeiten abwechselnd Ge Halbschwingung von us) d. h. jeweils mit halber Schaltfrequenz. Nur 2 Ventile in Reihe, daher für hohe Leistungen geeignet.
R
Durch 2 zusätzliche Schalter kann die Aufladung der Speicherdrossel jetzt auch mit der Gleichspannung Ud erfolgen, wodurch ein 4-Quadrantenbetrieb möglich ist. Der cos ("') kann beliebig eingestellt werden. Die Höhe der Gleichspannung kann auch bei schwankender Netzspannung sichergestellt werden. Netzstromverlaufsiehe Abb. 18-29.
Ls
4) 4-Quadrantensteller (------------- ..,.. ----
iS
Ls
.........• ................. J
_5ms_
Ergänzt man die Schaltung 1) um einen Eingangsgleichrichter, so erhält man den Pulsgleichrichter. Jetzt gilt: Ud> üs. Die Aufladung von L s ist nur über Us möglich (Netzkurzschluss). Durch sinusförmige Steuerung der Schaltzeit wird ein sinusförmiger Strom konstanter Phase erreicht (aktives PFC-Netzteil). Immer 3 Ventile in Reihe (Verluste!)
Abbildung 18-28 Entwicklung des Vierquadrantenstellers
iS
A~
~
~V
An ' TN
I
~~
.,
An
~ I
1
Abbildung 18-29 Netzstrom bei II-fachTaktung (ungefiltert)
t
Netzfrequenz 50 Hz, Taktfrequenz 550 Hz
18.10 Schaltnetzteile
18.10.5
345
Kontaktlose Energieübertragungssysteme
Für viele transportable Geräte wie z. B. Handy oder Notebook besteht der Wunsch nach einer kabeHosen Stromversorgung. Physikalische Grundlage einer derartigen ,,kontaktlosen" Energieübertragung ist die induktive Kopplung. Eine vom Strom i\ durchflossene Spule 1 erzeugt den magnetischen Fluss 01>10 wovon der Anteil 01>2\ Spule 2 durchsetzt (Abb. 18-30). Das Verhältnis 01>2\/01>\ wird als Koppelfaktor k bezeichnet (0 :'0 k :'0 1). Diese Anordnung bildet einen Transformator, bei dem beide Spulen über einen guten magnetischen Leiter, den EiSpule 2 senkem, magnetisch gekoppelt sind und räumlich eng beiein ander liegen. Der Koppelfaktor einer solchen Anordnung liegt nahe 1. Bei einer kontaktlosen Energieübertragung sind Abblldung 18-30 Schematische beide Spulen im Allgemeinen räumlich getrennt und haben Darstellung zur magnetischen keinen gemeinsamen Eisenkern, weshalb beide Spulen nur Kopplung "lose" gekoppelt sind (k« 1). Das elektrische Ersatzschaltbild entspricht aber weiterhin dem eines Transformators. Die lose Kopplung hat eine große Streuinduktivität zur Folge, wodurch die Ausgangsspannung stark lastabhängig wird und die Anordnung in dieser Form fiir eine Energieübertragung ungeeignet ist. Kompensiert man jedoch die Streu- und Hauptinduktivitäten über eine geeignete Kapazität, so ist diese Lastabhängigkeit aufgehoben, wenn Spule 1 über einen Wechselrichter mit der Resonanzfrequenz dieser Anordnung betrieben wird (Prinzip des "Tesla-Transformators").
I
kontaktloser Rasonanzübertrager
1T
Spule 1
Spule 2
Wechselrichter
Abblldung 18-31 Prinzip einer kontaktlosen Energieübertraguog
Die Ausgangsspannung kann entweder direkt mit dem Verhraucher wie z. B.einer Glühlampe verbunden sein oder steHt über einen Gleichrichter eine Gleichspannung z. B. zum Laden eines Akkus zur Verfiigung. Die Betriebsfrequenzen liegen zwischen 20 KHz und 10 MHz. Ändert sich die relative Position und Orientierung beider Spulen, so ändert sich der Kopplungsfaktor und damit die Resonanzfrequenz der Anordnung. Der Wechselrichter muss die Betriebsfrequenz automatisch nachführen und wird bei höheren Frequenzen vorzugsweise in MOSFETTechnologie ausgeführt. Befindet sich kein Sekundärteil (Spule 2) im magnetischen Feld, muss dieses abgeschaltet werden (z. B. Ladegerät). Begrenzend auf die Übertragungseigenschaften wirken sich die parasitären ohmsehen Widerstände aus, deren Wert info1ge Skin-Effekt frequenzabhängig zunimmt. Beim praktischen Einsatz von Geräten mit induktiver Energieübertragung sind Grenzwerte entsprechend DIN EN 62311 zu beachten.
18.10,6
E:aeqiaparlampen
18.10.6.1
L1mptIJa-LcuchtstoJfltzmpa Bino KOIßP"kt-LeuchIltoHlampe setzt Iidi l1IS meIIrenm bcnitII Mn""'twJ itompoDeJItlII zu............ Dm typiBchc:n Aulbu. ~ Abb. 111_32. Die Ri"ll""lP'ochall1mg C1111picht der in XapOlIO ~ ~tuag (aktift PFCSdIIituag). Der IUlgaapseitip HF_~ bcltcht Da zwei im Gc:pntakt ubc:itmdcn MOSFET (Tl, 1'3), dic iibcr eine Serien-lIe1'ooanz ~te1Il) dic BmmIpmmmg der LeuchtrlSln eaeugm. Dill: LImpl2Wrumpulsiatim~ 20 ... 50 kHz.
Die elektrjocb'" Gri!BeD. einer )andelsObJic:hen J'ornpoIkt-LeuchIltoHlampe aiad in Abb. 18-33 duptclll Der Nclzllboom oziat bei.n.n derzeit vcrfiigbmcn I-npcn dc:D ~!)pi_ lCbea Veriluf. Diuer Veriluf IDIISS beim &SItz von Glf!bJunpen durch EmqieIpcIunpen h!:njc:bic:htigt wcnIm.. Ein EimchaItvorpng reduziert die Lcbcmd."crlllD 2 - 5 Sbmdcn (dic ZIDdIpImumg l&t (1pIIItlert) FJ&IdrodemDaterill her-, ~ lieh mit dem QueckIilbel: vabindct). Am dicKm Effi:kt b.icrt dic VOD dc:D Haotclla::n msqdx:nc TrJ.cn"k"'T vtnI JOOOh bis 10000 h. Diele Werte beziehen D:h mfS ScJwlhmgen am Tag d. h. em... 3-StundI:II. Zyldlll (165 Minuten .,e:ID'" 15 Minuten"IUI"). Da- volle Lichtattom (d. h. 90 %) lteht ent DICh eiMr AvfWIrmze:it va:! 1 - 3 Mlnulm zur Verfi1cuDc. WIbmId der Lelo..,dlllM" reduziert lieh dic LiOOttmheute ktmtinui«Iid:L Wegen ckt- hohm Sdwktoflbelaatwlg (u.L
Qucd<Jilbel:) -vcn ddcktc Kompü:t-LeuchIItofBampc Ih StmdcrmilIl bch·ncklt Die 1Jchta..1beute(E:D«gieefflzi) liest bei ca. 6OlmIW. Vergleio:h: Gliihbimoca. 13lm1W)
NctzopauuuDa: lIJi lIDIi 1Irom. ~ einer 20 W KMnfII""P" ~)
otu= 100 V IIm 111(.
SOO!DA I DiY
18.10 Schaltnetzteile
18.10.6.2
347
Leuchtdioden (LEDs)
Wesentlich umweltfreundlicher als Kompakt-Leuchtstoftlampen sind Energiesparlampen auf LED-Basis. Die Gründe, die für eine Beleuchtung aufLED-Basis sprechen, sind:
» » » »
Hoher Wirkungsgrad, Lichtausbeute ca. 30 1m/W « 150 lm/W) Sofort volle Helligkeit (keine Aufwärmzeit), farbig oder weiß Höhere Lebensdauer (ca. 50 000 h, stromabhängig) Mechanische Rohnstheit (günstig für portable Geräte)
LEDs erzeugen Photonen (Licht) durch einen direkten Übergang der Elektronen vom Leitungs- in das Valenzband. Der pn-Übergang wird dafür im Gegensatz zu nonnalen pn-Dioden nicht aus Silizium, sondern als sogenannter ill- V-Verbindungshalbleiter auf GalliumarsenidBasis hergestellt (Verbindungshalbleiter werden zuje gleichen Teilen z. B. aus einem Element der ill. und der V. Hauptgruppe gebildet). Die Vorwärtsspannung ist von der Photonen-Energie, d. h. von der Lichtfarbe bestimmt und liegt im Bereich 1,5 V (Infrarot) und ca. 4 V (Ultraviolett). Die Farbeinstellung erfolgt bei der Herstellung der Halbleiter-Zusammensetzung z. B. durch die Zugabe von Phosphoratomen. Die Sperrspannung ist mit ca. 5 V relativ gering [31]. Um den hohen Wirkungsgrad einer LED als Lichtquelle voll auszunutzen, werden Ansteuerschaltungen mit einem optimal angepassteu Wirkungsgrad benötigt. Die Austeuerschaltung muss die LED mit einem konstanten Strom versorgen. Abb. 18-34 zeigt als Anwendungsbeispiel die Schaltung für eine Display-Hintergrundbeleuchtung (LED-Backlight). Boost Regulator
PWM-Current Source
.,._-------_ ... __ .. ., LED String 1111 "'11 .,.11 11.,.
'
Abbildung 18-34 Anwendungsbeispiel: Display Hintergrundbeleuchtung in LED-Technologie LEDs werden hier mit Strömen zwischen 10 mA - 100 mA
._-_ ................. LEDArray
betrieben (bis zu 20 LED je String in Serie).
Für eine gleichmäßige Ausleuchtung wird eine große Zahl an LEDs schachbrettartig angeordnet. Abhiingig von der Bildschimgröße sind z. B. 80 LEDs für einen l4"-Bildschirm erforderlich. Damit alle LEDs mit gleicher Helligkeit bzw. Farbe leuchten, müssen sie mit gleichem Strom betrieben werden. Dazu bietet sich eine Reibenschaltung an. Wegen der bei Reibenschaltung hohen Versorgungsspannung wird die Zahl der in Reibe geschalteten LEDs im Allgemeinen auf etwa 20 begrenzt. Die Vorwärtsspannung beträgt dann ca. 70 V und wird über einen Hochsetzsteller (Boost-Regulator) bereitgestellt. Eine LED-Reibenschaltung wird als ,,LED-String" bezeichnet. LED-Strings können - wie in Abb. 18-34 dargestellt - parallel betrieben werden. Die Einheit aller parallelgeschalteter LED-Strings wird als "LED-Array" bezeichnet. Jeder LED-String verfügt über einen Stromregler (pWM Current Source), der eine gleichmäßige Beleuchtung aller Strings über die gesamte Lebensdauer sicherstellt (BacklightAlternative: OLEDs). Als Lebensdauer wird die Zeitdauer bezeichnet, nach der die Lichtstärke auf 50 % abgefallen ist. Ursachen sind mechanische Veränderungen durch thermischen Stress (LEDs sind strom-
348
18 Gleichspannungswandler
betrieben und hsben daher eine hohe Eigenerwännung) sowie Alterung der Kunststoflkomponenten. Da gleichzeitig die Durchlassspannung der einzelnen LEDs ansteigen, ist fiir den Spannungsregler eine ausreichende Regelreserve vorzusehen. Die Lebensdauer einer LED ist stromabhängig und kann allgemein mit ::: 50 000 Stunden angegeben werden. Neben der Display-Anwendung werden LEDs vermehrt zu allgemeinen Beleuchtungszwecken eingesetzt. Hochleistungs-LEDs erreichen je nach Ausführung und Durchlassstrom einen Lichtstrom von 125 lm bis zu 1100 lm. Vomussetzuog ist eine ausreichende Wänneabfuhr. Derartige LEDs werden in Zukunft verstärkt als PKW-Leuchtmittel eingesetzt (2009: Audi R8, erstes Serienfahrzeug mit LED-Scheinwerfer). Farbwiedergabeind",,: Anders als Glühlampen sind LEDs keine Tempemturstrahler. Sie emittieren Licht in einem begrenztem Spektmlbereich. Die Farbwiedergabe eines beleuchteten Körpers wirkt daher unterschiedlich. Zwar tritt im Vergleich zum Tageslicht auch bei Glühlampenlicht eine leichte Veränderung des Farbeindrucks auf, aber die Farbwiedergabe ist aufgrund des kontinuierlichen Spektrums beider Lichtarten (Tempemturstrahler) vergleichbar. Zur Beschreibung der Farbwiedergabe unterschiedlicher Lichtquellen wurde auf Basis von 8 Referenzfarben ein Farbwiedergabeindex (Color Rendering Index, CR!) eingeführt [31]. Für Tempemturstrahler, wie z. B. einer Glühlampe, erreicht dieser den Maximalwert von CRl = 100. LEDs fiir Beleuchtungsan wendungen erreichen CRl-Werte zwischen 70 und 95. Lichtausbeute: Die Lichtausbeute ist eine lichttechuische Größe und wird in Lumen pro Watt (lm/W) angegeben. Da durch die Messung in der Einheit Lumen die Eigenschaften des menschlichen Auges über die ,,Hellempfindlichkeitskurve" berücksichtigt wird, erreichen die Farben Grün und Gelb besonders hohe W erte (das Empfindlichkeitsmaximum des menschlichen Auges liegt am Tag im grünen Bereich bei 555 um), blaue LEDs sclmeiden dadurch deutlich schlechter ab, obwohl der physikalische Wirkungsgmd fiir diese Farben vergleichbar ist. Viele handelsübliche LEDs liegen bei ihrer Lichtausbeute im Bereich zwischen 30 und 110 lmIW. Zum Vergleich beträgt die Lichtausbeute konventioneller Glüh- oder Halogenlampen 13 bzw. 17lm1W, bei Leuchtstoftlampen incl. Vorschaltgerät zwischen 50 und 70 lmIW. Schaltfrequenzen: LEDs lassen sich über den Betriebsstrom sehr sclmell schalten. Sie können mit Schaltfrequenzen bis weit über 100 MHz betrieben werden und kommen somit auch bei vielen Anwendungen der Optoelektronik wie z. B. als Optokoppler oder in der Datenübertragung zum Einsatz. Organische LEDs (OLEDs): Weitere Anwendungsmöglichkeiten speziell fiir großflächige Anwendungen (Handy-, Femsehdisplay, großflächige Beleuchtungselemente) bieten die so genannten orgauischen LEDs (OLED, Orgauic Light-Emitting Device). OLEDs werden aufGlassubstraten hergestellt (biegsame Kunststofffolien in Vorbereitung). Problematisch sind heute noch Alterungsphänomene durch Zerfall der orgauischen Schichten, bei Weißlicht-OLEDs führt unter Umständen eine unterschiedliche Alterung der Farbschichten zu Farbverschiebungen [31].
349
19 Stromversorgungen 19.1
Unterbrechungsfreie Stromversorgungen
Eine Unterbrechungsfreie Stromversorgung (USV) ist ein Stromversorgungssystem mit einem Energiespeicher, der bei Störungen der Versorgungsspannung wie z. B.: • • •
Netzausfall Über- oder Unterspannung Spannungseinbrüche, Spannungsspitzen Störspannungen Frequenzänderungen und harmonische Oberschwingungen
eine beständige Versorgung der Last sicherstellt. Eine detaillierte Klassifizierung erfolgt nach IEC 62040-3. Hinsichtlich der Arbeitsweise unterscheiden wir zwischen einer Online- und einer Oftline-USV. Bei der Oftline-USV muss bei Ausfall der Versorgung die Stromversorgung zunächst umgeschaltet werden, so dass eine kurze "Schaltpause" aufueten kann. Bei einer Online-USV werden die Verbraucher ständig über die USV versorgt, so dass bei einer Versorgungsstörung keine Beeinträchtigung der Verbraucher auftreten kann (Nachteil: Verluste). Eine USV kann einphasig (bis ca. 10 kVA) oder 3-phasig ausgefiihrt werden. Welche Art USV einzusetzen ist, hängt von der Art der Verbraucher ab und dem Schaden, der bei einer Versorgungsstörung auftreten kann. Die Kapazität des Energiespeichers muss den Anforderungen der Verbraucher angepasst sein. Hier genügen u. U. kleine Kapazitäten, um beim Ausfall der Energieversorgung z. B. ein Rechnersystem nach erfolgreicher Datensicherung innerhalb 5 bis 10 Minuten sicher herunterzufahren, oder es muss die Zeit bis zum sicheren Betrieb einer Notstromversorgung (Dieselgenerator bzw. Brennstoffzelle) überbrückt werden können (Autonomiezeit). Die Leistungsbemessung der Stromversorgung richtet sich neben der Nennleistung der angeschlossenen Verbraucher und deren Einschaltstrom (bei einem Motor beträgt der Einschaltstrom bis zum 6-fachen Nennstrom) auch nach der Stromkurvenform. Die Stromkurvenform wird durch den crest factor c, der bei einem PC-Netzteil bis zu c = 3 betragen kann, berücksichtigt. Ferner können Leistungspendelungen zu Spannungsschwankungen fiihren, die sich bei Beleuchtungsanlagen als Flicker störend bemerkbar machen. NSR
UWR
Dy-Transformator
...........................................
LI L2 L3
3- 1---,...--1\
Np
Sinusfilter
~
Ns
Ll'
-
Up
L2' ---!
Us ,!
L3'
LF CF
--! ....,-+..._ . . ._ . . ..:..~. . .>-.._._.....~....._.....~.....--!... _
..............................L....._....._....
N'
AbbUdung 19-1 Typische Ausführung einer batteriegestützten On1ine-Stromversorgung
J. Specovius, Grundkurs Leistungselektronik, DOI 10.1007/978-3-8348-8270-7_19, © Vieweg+Teubner Verlag | Springer Fachmedien Wiesbaden GmbH 2011
350
19 Stromversorgungen
Den Aufbau einer USV fiir Drehstromanwendungen zeigt Abb. 19-1. Für die Bereitstellung sinusformiger Spannungen ist ein Sinusfilter vorgesehen. Der Transfonnator stellt die Potenzialfreiheit sicher, erzeugt den Mittelpunktleiter (N') und passt die Höhe der Ausgangsspannung an. Der UWR kann als Pulswechselrichter betrieben werden, um Toleranzen der Netz- oder Batteriespannung auszugleichen. Im Nonnalfall speist der Eingangsstromrichter ESR die Energie in den Zwischenkreis ein. Das Batterieladegerät sorgt gleichzeitig fiir eine ausreichende Batterieladung. Im Störungsfall wird in Abb. 19-1 der Schalter S automatisch geschlossen, und die Batterie stützt die Eingangsspannung des Wechselrichters.
19.1.1
OnIine-Systeme
Im Nonnalfall erfolgt die Versorgung des Zwischenkreises über den Eingangsstromrichter. Bei Ausfall der Energieversorgung wird der Zwischenkreis automatisch über die Batterie gestützt. Die Spannungsdifferenz durch die geringere Batteriespannung wird über die Aussteuerung des Pulswechselrichters korrigiert. Die Online-USV ist ständig in Betrieb, so dass zur Verlustbegrenzung die USV über einen hohen Wirkungsgrad verfügen muss. Eine Online-USV ist immer dann sinnvoll, wenn hohe Anforderungen an die Qualität der Versorgungsspannung gestellt werden und keine Umschaltzeiten auftreten dürfen.
.-..................................................................................................................
!
Versorgungsnetz
ESR
WR
Abblldung 19-2 Aufbau einer Online-USV ESR: Einspeisestromrichter BLG: Batterie1adegerät WR: Wechselrichter
BLG
I
Onllne-
..................................................................................................................Y.t:!Y........ 19.1.2
Oftline-Systeme
Durch Wegfall des Netzstromrichters ESR in Abb. 19-2 erhält man eine Offiine-USV nach Abb. 19-3. Im Normalbetrieb wird nur der Akkumulator über das Batterieladegerät BLG geladen. Im Störungsfall schaltet sich die USV ein und stellt die weitere Energieversorgung sicher. Die mögliche Dauer der Versorgung hängt wie bei der Online-USV von der Kapazität des Energiespeichers ab. r············
Abblldung 19-3
Versorgungs-
netz
Aufbau einer Offiine-USV Netzbetrieb BLG: Batterieladegerät BLG
WR
Batteriebetrieb WR: Wechselrichter
otnine-i
................................................................................... y.~Y...l
19.2 Photovoltaische Stromversorgungen
19.2
351
Photovoltaische Stromversorgungen Hochsetzsteller
Pulswechselrichter ["-_ ......................
LI SolarPanel
N
:-
CPN
&7////////////////////////////////ff//////7/.
Abbildung 19-4 Prinzipschaltbild eioer transformatorloseo Photovoltaik-Wechselrichteran1age
Die Höhe der Eingangsspannung up ist abhängig von der Anzahl in Reihe geschalteter Solarzellen und schwankt mit der Strahlungsintensität, der Temperatur und dem entnommenen Strom. Die Gleichspannung Up wird deshalb über einen Hochsetzsteller zunächst in eine konstant hohe Gleichspannung Ud umgeformt. Die Höhe der Gleichspannung Ud muss für die Funktion des Pulswechselrichters oberhalb des Scheitelwertes der maximal möglichen Netzspannung "N gewählt werden. Anschließend formt der Pulswechselrichter diese Gleichspannung mit einer Schaltfrequenz von z. B. 20 kHz in eine einphasige Wechselspannung USt um. Dabei wird der PWR so gesteuert, dass der Netzstrom iN einen sinusfönnigen Verlauf zeigt und unmittelbar in Phase mit der Netzspannung "N liegt, so dass die Energie mit einern Leistungsfaktor von I in das Netz eingespeist wird. Über den Effektivwert des Netzstromes wird die Leistung so eingestellt, dass die Solarzelle möglichst im Punkt maximaler Leistung betrieben wird (MPP). Ohne Eingangstransformator arbeitet das Panel aufNetzpotenzial. Zur Minimierung parasitärer Erdströme über die parasitäre Panel-Erd-Kapazität CPE sollte bei dieser Schaltungstopologie die Netzdrossel LN auf die Netzleitung symmetrisch aufgeteilt werden.
U
a.) symmetrische Netzdrossel (LN- ~ LN+)
Abbildung 19-5 Potenzialverlauf im Zwischeokreis
_ Ud 2
80 , llms
352
19.3
BrennstoffzeUen-Stromversorgungen
Um die chemisch gebundene Energie eines Brennstoffes in elektrische Energie umzuwandeln, gibt es nach Abb. 19-6 zwei Verfahren.
I!:tofI- ~ ~:,sche H~~~he I I!:toff- I-I-------,--.~~I ;,=he I ~I Wanne
Thennische Verbrennung
Kalte Verbrennung
I
Abbildung 19-6 Verbrennungsarten
Bei der thermischen Verbrennung wird die Brennstoffenergie zunächst in thermische Energie (Wärme) umgewandelt und auf ein Arbeitsmedium übertragen. Eine Wärmekraftmaschine wandelt die thermische Energie in mechanische Energie um. Ein elektromechanischer Energiewandler (Generator) wandelt schließlich die mechanische Energie in elektrische Energie um. Nach diesem Prinzip funktionieren z. B. fossil befeuerte Kraftwerke. Jede einzelne Umwandlung erfolgt mit Energieverlusten, wodurch dieses Verfahren einen ungiinstigen Wirkungsgrad hat. 1m Gegensatz zur thermischen Verbrennung findet in der Brennstoffzelle eine direkte, elektrochemische Umwandlung statt. Weil das Reaktionsprodukt das gleiche ist wie bei einer thermischen Verbrennung und der Vorgang bei niedriger Temperator stattfindet, spricht man von einer ,,kalten Verbrennung" (Abb. 19-6). Dabei ist der Wirkungsgrad wegen der einmaligen Energiewandlung in elektrische Energie wesentlich höher als bei der thermischen Verbrennung und erreicht ca. 60 %. Die anfa\\ende Wärmeenergie tritt parallel zur elektrischen Energie auf und kann z. B. in einem Blockheizkraftwerk ebenfalls genutzt werden. Als Brennstoff kommt Wasserstoffgas (Hz} zum Einsatz (Energiedichte ca. 30 kWhlkg). Dieses verbrennt mit (Luft-) Sauerstoff (0) und liefert thermische und elektrische Energie mit dem Abfallprodukt Wasser. Der elektrische Minuspol (Elektronenüberschuss) befindet sich an der
.l!. P
t
"
"0
1,0·· I
r-~
" :
..- j -... _
0,8··
... _
....
0,6--
---t-- -
0,4--
-+--
I
:
I
··-1-
0,2
!
0 0
10
20
I
! 30
40 [lA
-
Abbildung 19-7 Typische Strom-Spannungs- und Leistungskennlinie einer Brennstoffzelle
19.4 Energiespeicher
353
Wasserstoffseite. Durch Umkehr der Stromrichtung speichert die Brennstoffzelle elektrische Energie durch Aufspaltung von Wasser io Wasserstoffgas und Sauerstoff io chemischer Form. Die Belastungskennlinie eioer Brennstoffzelle zeigt Ahh. 19-7. Die K.ennlioie zeichnet sich durch drei typische Bereiche aus:
I. Leerlauf, die chemische Reaktion wird durch hohe Ladungsträgerdichten behiodert. Im Bereich kleioer Ströme nionnt die Spannung daber stark nichtlinear ab. Die Leerlaufspannung eioer Zelle beträgt ca. 1,3 V. Durch Reihenschaltung mehrerer Brennstoffzellen zu eioern Stack kann die gewünschte Gleichspannung eingestellt werden.
2. Bei höheren Strömen geht die K.ennlioie io eioe Gerade über. Die Zelle zeigt eio ohmsches Verhalten (Verlustleistung --> thermische Energie). 3. Bei hohen Strömen fiihren Oberflächeneffekte zu einer verminderten Gaszufuhr und zu einer reduzierten Verhrennung, wodurch die Zellenspannung schnell zusammenhricht. Interessant fiir die Anwendung der Brennstoffzelle als Stromquelle ist die maximal erreichbare Leistung. Der Bereich maximaler Leistung liegt ungeflihr bei halber Leerlaufspannung. Die Brennstoffzelle sollte daber io diesern Spannungsbereich betrieben werden. Die Umwandlung der Gleichstromenergie io Wechselstromenergie erfolgt z. B. mit eioern Wechselrichtersystem, wie es bei der photovoltaischen Stromversorgung io Abb. 19-4 vorgestellt wurde. Für die Anwendung der Brennstoffzelle als Energiequelle, iosbesondere auf Fahrzeugen mit Elektroantrieb, ist die ausreichende Speicherung von Wasserstoffgas entscheidend.
19.4
Energiespeicher
Energiespeicher werden zu Zeiten geriogen Energiebedarfs mit Energie geladen und bei hohern Energiebedarf entladen. Durch die Speicherung kann zum einen eioe Vergleichmäßigung der Energieaufuahme erreicht werden, zum anderen kann auftretende Bremsenergie, z. B. bei Fahrzeugen, zurückgewonnen werden. Eio Energiespeicher muss elektrische Energie kurzfristig speichern oder abgeben können. Diese Fähigkeit wird durch die Leistung bzw. den Leistungsgradienten beschrieben. Abb. 19-8 zeigt eioe Übersicht über verschiedene Technologien zur Speicherung elektrischer Energie. Speicherung elektrischer Energie
Abblldung 19-8
Speichertechnologien direkt
indirekt
chemische Energie Kondensator
Akkumulator
Breonstoffzelle
354
19 Stromversorgungen
Elektrische Energie kann direkt im elektrischen oder magnetischen Feld gespeichert werden (Kondensator bzw. supraleitende Magnetspule). Eine indirekte Speicherung erfolgt in chemischer Form (Bleiakkumulatoren, Brennstoffzelle), in mechanischer Form als kinetische Energie in Schwungradspeichern nach Abb. 19-10 oder als potenzielle Energie (Gasdruckspeicher, Pumpspeicherwerke) Die genannten Speichertechnologien weisen unterschiedliche Eigenschaften auf hinsichtlich der speicherbaren Energie W (kWh), > die nutzbare gespeicherte Energie wird als Speicherkapazität bezeichnet •
der erzielbaren elektrischen Leistung P (kW), > der zeitlichen Änderung der gespeicherten Energie (dW/dt) des Leistungsgradienten > maximale zeitliche Änderung der Leistong pro Zeiteinheit (dPldt) der Energie- und Leistungsdichte > Verhältnis der nutzbaren Energie bzw. Leistong zur Masse bzw. zum Volumen der Zugriffszeit > Zeit zwischen Leistongsanforderung und Abgabe von 50 % der gespeicherten Energie der Zyklenfestigkeit > die Anzahl der Ladungen I Entladungen begrenzt die Lebensdauer
•
Darüberhinaus unterscheiden sich die einzelnen Speichertechnologien hinsichtlich der so genannten Selbstentladung und des Wirkungsgrades bei der Auf- und Entladung. Ortsfeste Schwungradspeicher werden beispielsweise zur Speicherung bzw. Bereitstellung von Bremsund Beschleunigungsenergie im schienengebundenen Personennahverkehr (SPNV) eingesetzt. Hierdurch lässt sich die Energieaufuabme aus dem öffentlichen Netz verg!eichmäßigen, wodurch sich insgesamt günstigere Tarife (und damit Kosten) für eine Gleichstrom-Fahrstromversorgnng ergeben.
•
Falnen
Bremsen
= -
+ ,---- Anfahren
I
--l>II
Speicher
Gleichrichter
Abbildung 19-9
I
Anwcndungsbeispicl Energiespeicher im SPNV
Falnzeug
n
n
zur wiederverwertbaren Speicherung überschüssiger
Bremsenergie.
Als Kurzzeit-Energiespeicher werden auch Doppelschichtkondensatoren (Supercap) eingesetzt. Doppelschichtkondensatoren haben Kapazitäten bis über 5000 F. Die Betriebsspannung liegt mit Rücksicht auf die Durchhruchspannung der chemischen Doppelschicht nicht weit über 2,5 V. Durch Reihen- und Parallelschaltong derartiger Kondensatoren lassen sich im SPNV z. B. bei einer Straßenbahn in stationären Anlagen ausreichende Energiernengen speichern und damit Leistongsspitzen bei Aufahr- und Bremsvorgängen abfangen sowie eine Vergleichmäßigung der Energieaufuahme analog zum Schwungradspeicher erzielen. Vergleichbare Anwendungen für Doppelschichtkondensatoren fmden sich bei Hybridantrieben in Kraftfahrzeugen und in unterbrechungsfreien Stromversorgungen (USV).
19.4 Energiespeicher
355
Abbildung 19-10
Lagerung
Ausfiihrungsbeispiel eines Schwungradspeiebers
Stator -----..., Rotor
--++-++-
FU
++ P
LI L2 L3
FU: Frequenzwnrichter Schwungradspeieber aus Kunstfaserverbundwerkstoffhaben:
•
Berstschutz
Drehzahlen bis über n ~ 40000 min- I eine Kapazität bis ca. 3 kWh eine Leistung bis ca. 2 MW
Gehäuse Magnetische Energiespeicher werden zur Verbesserung des Wirkungsgrades mit supraleitenden Spulen ausgeführt. Ohmsehe Verluste sind dann vemachlässigbar, allein der Leistongsbedarf der Kältemaschine bestimmt den Wirkungsgrad. Deshalb lohnen sich derartige Speicher nur für höchste Leistongen. Supraleitende magnetische Energiespeicher (SMES) arbeiten mit einer magnetischen Flussdichte bis \0 T (und daher ohne Eisenkern, der gesättigt und damit unwirksam wäre). SMES haben eine hohe (Kurzzeit-) Leistong. Sie haben einen großen Leistongsgradienten und können in der öffentlichen Energieversorgung zur Verbesserung der Netzqua\ität, als Kurzzeit-Hochleistungsspeicher für USV-Anlagen sowie zur Blindleistongskompensation und GangJinienglättong von Windkraftanlagen eingesetzt werden. Wegen der erforderlichen Hilfseinrichtongen ist ein großflächiger Einsatz nicht zu erwarten. Die von einem beliebigen Energiespeicher bereitgestellte Leistong P ist über die zeitliche Änderung der gespeicherten Energie W definiert (GI. (19-1).
P = dW dt
(19-1)
Für einen Kondensator der Kapazität C erhält man in GI. (19-2) für die Leistong P:
. 1 2 dU dU nnt W = "2 CU und / = C dt folgt P = CU dt = U·/
(19-2)
Die maximale Leistong ist abhängig von der aktuellen Ladespannung und über den möglichen Lade- bzw. Entladestrom begrenzt. So verfiigt ein Kondensator mit einer angenonnnenen Kapazität von 200 F (Doppelschichtkondensator) bei einer Spannung von 42 V mit GI. (19-2) über eine Energie von 49 Wh. Damit kann dieser Kondensator z. B. für \0 s theoretisch eine Leistong von 17,64 kW bereitstellen. Für die maximale Leistong eines Akkumulators mit der Leerlaufspannung Uo gilt wegen des nicht vernachlässigbaren Innenwiderstandes Ri die Beziehung der Leistungsanpassung nach GI. (19-3), der maximale Wirkungsgrad beträgt 50 %.
P max
=
(19-3)
356
19 Stromversorgungen
Beim Lade- und Entladevorgang ist die Klemmenspannung eines Akkumulators bzw. Kondensators abhängig vom aktuellen Ladezustand. Abb. 19-11 zeigt den typischen Verlauf des Ladebzw. Entladevorganges einer Li-Ionen-Akkumulators im Vergleich zu einem Doppelschichtkondensator. Li-Ionen-Akkumulator
Abbildung 19-11
~-4--t--=_=--Laden----. ,
Vergleich der Lade-Ent1adespannung eines Li-lonen-Akkus und eines Doppelschichtkondensators
Entladen-
2
Doppelschichtkondensator
1
o
(Konstantstrombetrieb)
~---r--------~------------T-~
Zur Bereitstellung einer stabilen Ausgangsspannung Ud ist daher eine Stellerschaltong nach Abb. 19-12 erforderlich. Der Akkumulator wird vereinfachend durch eine Spannungsquelle Uo fiir die Leerlaufspaonung und einen Innenwiderstand Ri nachgebildet. Ri wird aus den Gesamtverlusten des Speichers als Ersatzgröße ennittelt. Der DCDC-Steller kaon als Hochsetzsteller DCDC-Wandler
Akkumulator
UO!C D
R.
:....;;.::;
!
!
JE
UB
I
Abbildung 19-12
Ud!
V
Gesamtsystem mit DCDC-Wandler und Verbraucher V
'--
fiir die Klemmenspannung UB (siehe Kapitel 18) arbeiten. Der Wirkungsgrad dieser zusätzlichen Stellerschaltong « 0,99 - abhängig von der übertragenen Leistong) seizt den Gesamtwirkunsgrad des Energiespeichers weiter herab. Für ein Schwungrad mit dem Trägheitsmoment J erhält man zum Kondensator analoge Beziehungen in GI. (19-4). Die Leistong eines Schwungrades ist über das zulässige Drehmoment begrenzt. Die gespeicherte Energie wächst linear mit dem Trägheitsmoment J und quadratisch mit der Drehzahl 00. Man wird daher eine hohe Drehzahl anstreben. Zur Verbesserung des Wirkungsgrades werden Schwungräder bei hohen Drehzahlen magnetisch gelagert und das Gehäuse wird evakuiert. Die Sicherheitsaspekte müssen gewährleisten, das Gefährdungen bei mechanischer Beschädignng ausgeschlossen sind (z. B. Berstschutz). Ferner ist zu beachten, dass der Drehimpuls (JÖJ) eine vektorielle Größe (und daher räumlich orientiert) ist. Eine Änderung der Orientierung des Drehimpulses ist nur über äußere Momente möglich (Kreiselmomente).
.
mtt W
=
I
2
dw
-Jw und M= J 2 dt
folgt P
=
dw dt
Jw-
=
w·M
(19-4)
Die zeitliche Änderung der Leistong, d. h. der Leistongsgradient ist in GI. (19-5) angegeben. Er sagt aus, wie sclmell die geforderte Energie bereitgestellt (oder gespeichert) werden kann. Dieser Begriff ist wichtig z. B. fiir die Fahrdynamik von Fahrzeugen
19.4 Energiespeicher
357
F=
dP dt
(19-5)
Abb. 19-13 zeigt einen typischen Lade-Entladeverlaufeines Energiespeichers. Die hier dargestellte vollständige Entladung ist nicht bei jedem Speichertyp zolässig (Akkumulatoren). Ebenfalls ist die Lade- Entladedauer je nach Speichertyp unterschiedlich. Für diese Eigenschaften dient die Zngriffszeit, die Leistung und der Leistungsgradient als VergJeichsgröße. AbbUdung 19-13
,Zugriffszeit
PIW W/Wh
50%--
Zusammenbang
~l.J:i'~~
zwischen
Laden
~ Energie
(W),
~ Leistung (P)
----------~-------------
idt, ---:r--
und dem
t dP
~ Leistungs-
gradienten (F)
Entladen
Aufgabe der Leistungselektronik ist neben der Überwachung des Ladezustandes die Anpassung bzw. Steuerung des Energieflusses zwischen Energiespeicher und Verbraucher (Energiebzw. Power-Management). In Abb. 19-14 ist ein Beispiel fiir eine Insel-Stromversorgung dargestellt. Die Verbraucher werden von einem Hauptgenerator (legt Netzspannung- und Frequenz fest) versorgt. Zusätzlich speisen 2 Windgeneratoren Energie in das Netz ein. Die Gang1inienglättung der Windenergie erfolgt über einen Schwungradspeicher bzw. durch einen Batteriespeicher. Zusätzlich sind 2 Notstromgeneratoren vorgesehen. Das Power-ManagementPower Management System
DieselSchwungradGeneratoren Speicher Wind-Generatoren
Verbraucher AbbUdung 19-14 Power Management System (Inselnotz)
BatterieSpeicher
HauptGenerator
358
19 Stromversorgungen
System steuert die Komponenten so, das die zur Verfiigung stehende Windenergie möglichst vollständig verwendet wird - bei konstanter Netzspannung und -Frequenz. Werden bei der Steuerung des Energieflusses zusätzlich alle Verbraucher einer Region über so genannte "intelligente" Stromzähler (d. h. fernablesbar und bedienbar) direkt mit einbezogen, so kann der Energieverbrauch dern Energieangebot unmittelbar angepasst werden, man bezeichnet diese Methode dann als Netz-Management bzw. Smart-Grid. Hierfiir ist eine zusätzliche Informations-Infrastroktur erforderlich. Ein weiteres Beispiel für ein Power-Management-System zeigt Abb. 19-15. Darin ist die Steuerung der Stromversorgung eines mobilen GPS-Navigationsgerätes dargestellt. Energiespeicher ist hier ein Lithium-Ionen-Akkumulator. Die Aufgaben sind die Akku-Ladung,Versorgung der elektronischen Baugruppen mit konstanter Spannung, des Displays, sowie des USB-Anschlusses. Die Exteme Versorgung erfolgt z. B. über einen Kfz-Adapter. I
KfzAdapter
I I
I~SBI Anschluss I
----------------------------------, (5 V)
~
Akku-Lader mit dynamischem Leistungsmanagement
u.
0 ...
Li thium-
Ion
Ak ku
."""
Reset Inlerrupls
Converter 1
ElAI
Buck Converter2
I'().
LD01
l_
:
~ ~ ~
I:
LD02
ADU
LD03
RGB-Treibel
,I
TPS6S820
:
LD04
I
Re...
f-f-
Boost.co"""... I :' filrwelße LEDs
(1,2 V)
T
(1,8 V)
I
:
T
4>h
···························T······: :1:=
Uxem
I ~
ViFlA USl). ud (1.8 V) UGPS
Uus. TX
:;~:.(
I
Für diese komplexe Aufgabe stehen wegen der hohen Stückzahlen spezielle Schaltkreise als Standardkomponenten zur VertUguog. Die integrierten Funktionen sind hier gestrichelt eingera1unt
nungsregler
(arbeitet auch noch bei sehr
3-6weiße LEDs
v, v, v,
Power-Manageroent-Systero
einer GPS-Stromversorgung
LDD: Low Drop Output -Span-
(3.3 V) U AwUo.
25
Abbildung 19-15
mAl
geringer Betriebsspannung
(L\.u < 50mV)
Bei Desktop-Computern, Notebooks und Servern unterliegt der Energiebedarf einzelner Komponenteu starken Schwankuugen. Ein Power-Management-System schaltet bei diesen Einrichtungen nach einer bestimmteu Leerlaufphase einzelne Hardware-Komponenteu teilweise oder ganz ab bzw. schaltet diese Komponenten bei Bedarf wieder zu. Ein Desktop-Computer kann auf diese Weise verschiedene Betriebszustände (Modi) zwischen "voll funktionsfähig", "Schlaf-Modus (CPU-Taktsperre), Standby-Modus (suspend to Memory, Motherboard-Hardware ist größteuteiis abgeschaltet), Ruhezustand (suspend to Disk, Betriebszustandsdateu sind auf einem nicht flüchtigen Speicher gesichert) und dem "Soft-Off-Modus", bei dem schließlich das Netzteil softwaremäßig ausgeschaltet ist, annelnnen. In diesem Zustand kann der Rechner über externe Signale wieder eingeschaltet werden (Wake On). Um dies zu vermeiden, ist ein Netzschalter erforderlich (Hardware-Oft). Dieses Power-Management-System setzt eine kompatible Hardware voraus, die über Betriebssystem-Software überwacht und gesteuert werden kann. Für Systeme, deren Energieverbrauch durch verschiedene Betriebs-Modi über das Betriebssystem dem Bedarf angepasst wird, hat sich ein Industriestandard durchgesetzt, der als ,,Advanced Configuration and Power Interface (ACPI) bezeichnet wird.
19.4 Energiespeicher
19.4.1
359
Konzepte für akkugestützte Fahrzeugantriebe
Energiespeicher in Fahrzeugen war bisher der Treibstollt.nk. Der bei Norma1temperatur und -druck flüssige Treibstoff ist leicht zu lagern, kann schnell ersetzt werden (tanken) und ist beliebig haltbar. Aufgrund der hohen Energiedichte flüssiger Treibstoffe von ca. 10 kWh/l können mit relativ geringem Speichervolumen und -Gewicht ausreichend große Reichweiten realisiert werden. Bei einer Dichte von 0,83 kg/l (Diesel) lassen sich in einem 60 I Tank 600 kWh unterbringen bei einer reinen Treibstoffinasse von ca. 50 kg. Die gespeicherte Energie kann vollständig entnommen werden (d. h. der Tank kann völlig leergefahren werden). AbbUdung 19-16 Leistungselektronik.
-W
Rein elektriscber Antrieb WR: Wechselrichter W: Energie
Der Vorteil eines Elektroantriebes ist der vergleichsweise giinstige Wirkungsgrad von bis zu 90 %. Der Motor arbeitet somit wesentlich effektiver als ein Verbrennungsmotor mit einem Wirkungsgrad von ca. 30 %. Das mit Abstand am weitesten verbreitete und am längsten und griindlichsten erforschte und dokumentierte Batteriesystem sind die Bleiakkumulatoren. Sie dominieren wegen ihrer Wirtschaftlichkeit unangefochten die Bereiche der Starter-, Antriebssowie der ortsfesten Batterien. In konventionellen Fahrzeugen versorgen Bleibatterien den Starter-Antrieb mit einer (Kurzzeit-) Leistung von bis zu 2 kW. Bisherige Versuche, ein batteriegespeistes, elektrisch angetriebenes Fahrzeug mit Bleibatterien zu rea1isieren, scheiterten wegen der zu geringen Reichweite letztlich am hohen Gewicht bzw. an der niedrigen Energiedichte (0,035 kWh/kg) der Bleibatterie. Der vorhandene Einbauraum sowie die vertretbare Masse des Energiespeichers erlaubten nur Reichweiten unter 100 ktn. Hinzu kommt das Problem der Batterieladung, die über mehrere Stunden erfolgen muss und nicht mit den üblichen "Taukzeiten" vergleichbar ist. Hier kommt nur der regelmäßige komplette Austausch der Batterie an einer"Tankstelle" in Frage, der wegen der großen Masse nur mit speziellem Gerät erfolgen kann. Neben dem allein akkumulatorbetriebenen Elektroauto, welches aus den oben genannten Griinden heute eher als Sonderform eines Fahrzeuges anzusehen ist, wurde daher das Konzept des Akku-gestützen Antriebes (Hybridantrieb) entwickelt. Der Akku dient hierbei (mit üblicherweise ca. 6-15 kWh Speichervermägen) als Kurzzeitspeicher für geringe Fahrleistungen, ein Verbrennungsmotur übernimmt den Antrieb bei höheren Leistungsanforderungen und kann gleichzeitig den Ladezustand des Akkus sicherstellen. Die Steuerung des Verbrennungsmotors kann in weiten Betriebsbereichen allein nach ökonomischen Gesichtspunkten erfolgen, wenn der Elektromotor zur dynamischen Unterstützung des Antriebes (Boost) bei Beschleunigungsund Bremsvorgängen eingesetzt wird. Bremsenergie kann, soweit der Speicher aufualunebereit ist, zurück gewonnen werden und schont damit nebenbei auch die Bremsbeläge. Wird beim Hybridantrieb zusätzlich eine externe Aufladernöglichkeit vorgesehen (Ladegerät-Anschluss), so spricht mau von einem "Plug-in-Hybrid". Die Batteriespannung wird auf die Antriebsleistung abgestimmt. So reicht für den 2 kW-Anlasser eine 12 V-Starterbatterie. Wegen der Stromwärmeverluste (-J2) wählt mau bei höheren
360
19 Stromversorgungen
Leistungen auch höhere Spannungen. Für einen Hybridantrieb mit 6 kW elektrischer Leistung sind z. B. 42 V ausreichend. Bei höheren Leistungen wählt man Spannungen> 60 V. Für ein rein elektrisches Fahrzeug sind für Leistungen> 35 kW Spannungen» 60 V erforderlich. Beim Hybridantrieb sind zwei Ausfiihrungsformen möglich:
» paralleler Hybridantrieb Bei eiuem parallelen Hybridantrieb nach Abb. 19-17 können beide Antriebssysteme sowohl einzelu als auch gleichzeitig zum Vortrieb des Fahrzeugs genutzt werden. Aufgrund der Leistungsaddition können beide Motoren relativ kleiu ausgelegt werden, ohne dass Einbußen beim Beschleunigen oder an Steigungen vorhanden sind. Üblicherweise wird so der elektrische Antriebszweig für den Stadtverkehr ausgelegt (begrenzter, emissionsfreier Fahrbetrieb), während der leistungsstärkere Verbrennungsmotor für Überlandverkehr, auf Autobahnen und die Ladung des Akkus genutzt wird. Abblldung 19-17
Verbrennungs-
motor
Paralleler Hybridantrieb WR: Wechselrichter
W:
'-------,J•...............0-.- - - - - '
Energie
» serieUer Hybridantrieb Kennzeichen serieller Hybridantriebe ist die Reihenschaltung der Energiewandler ohne mechanische Anbindung des Verhrennungsmotors an die Antriebsräder (Abb. 19-18). Der Verhrennungsmotor treibt hierbei einen Generator an, der seiuerseits den elektrischen Fahrantrieb sowie einen im elektrischen Zwischenkreis angeordneten Speicher mit Energie versorgt. Nachteilig ist die mehrfache Energieumformung (Wirkungsgrad).
...c {!.
•...
C ,,~
cO c-
I!0 E
-e
:: 19.4.2
Abblldung 19-18
LeistungBolektronik ----------------- - - - i
~
~
•c • CI
~
~
;=
~
:E
•
.a
Serieller Hybridantrieb
CI
WR: Wechselrichter W: Energie
-!-;
.!.Iw
Speichertechnologien f"ür Elektrofahrzeuge
Die derzeit aussichtsreichste elektrische Speichertechnologie stellt die Klasse der Lithium-Ionen-Akkumulatoren dar. Unter diesem Begriff ist heute eine Vielzahl von technologischen Varianten zu verstehen, deren gemeinsamer Nenner darin besteht, dass der Energietransport innerhalb der Zelle durch den Fluss freier Lithium-Ionen und deren reversible Einlagerung (man spricht von "lutercalation") in die Elektroden erfolgt. Die negative Elektrode (Anode) besteht aus Graphit mit eingelagerten Lithiumionen. Eine Lithium-Elektrode wäre zwar deutlich leis-
19.4 Energiespeicher
361
tungsfähiger, nach der Entladung aber aufgelöst und könnte nicht durch den Ladevorgang rekonstruiert werden (-+ Lithium-Batterie). Die Ausfiihrung der Elekttoden steht im Mittelpunkt vieler Weiterentwicklungen. Insbesondere von nanotechnologischen Werkstoffen verspricht man sich eine deutliche Leistungssteigerung bei gleichzeitig verbesserter Sicherheit, Temperaturstabilität und Lebensdauer. Den Aufbau eines aktuellen Lithium-Ionen Akkumulators zeigt Abb. 19-19. Die positive Elektrode (Kathode) besteht aus einem Lithium-Metall-Oxid, die (negative) Anode aus Graphit Das Graphit ist kugelförmig strukturiert, so das sich in den Zwischenräumen Lithium-Ionen einlagern können. Diese Einlagerung erfolgt während des Ladevorganges (vgl. Ab. 19-19a). Bei der Entladung werden die Lithium-Ionen von der Anode wieder abgegeben und von der Kathode aufgenommen (Abb. 19-19b). Sowohl Ladung als auch Entladung bedeuten einen Materialtansport zwischen den Elekttoden. Die damit verbundenen zyklischen Volumenänderungen stellen einen mechanischen Stress dar, der letztlich die Lebensdauer des Akkumulators auf ca. 1000 Ladezyklen begrenzt. Die elektrische Isolation innerhalb des Akkumulators erfolgt durch eine Ionen durchlässige Zwischenschicht (Solid Electrolyte Interphase, SEI) an den Elektroden, die sich in Verbindung mit dem Elekttolyt während der ersten Lade- und Entladezyklen auf Kosten der Aktivmassen ausbildet (Formierung). Diese Isolierschicht ksnn bei Tief-Entladung (Unterspannung) oder durch Übertemperatur (Stromwänne oder externe Erwännung) zerstört werden, wodurch der Akkumulator intern kurzgeschlossen wird. Ein gefährlicher Zustand, der sich bis zu einer Explosion des Akkumulators aufschaukeln ksnn (Thermal-Runaway). Gerade diese Temperaturempfindlichkeit bereitet große Schwierigkeiten bei der Entwicklung von betriebssicheren Hybridfahrzeugen, die letztlich auch bei Minustemperaturen von bis zu -25°C zuverlässig ihre Leistung abgeben sollen.
u
a)
b)
r'\
J, ~ Ladung
Al
\..J
a----
hntladong
Elektronen-
Strom leitung
+
u ----..
-
Cu
Verbraucher
R
Al
Cu
r-e~ffMJ H~ EfI! lonenH ,Cl
€@ q; dun:hlässiger:C €@ q; NichUeiter (SEI):C
~ ~
~
'r"
effo~ ::=1 ~ €@ €@
c lonen-
stromleitu~
!!!..~~
r-