Vibration of Mindlin Plates Programming the p-Version Ritz Method
This Page Intentionally Left Blank
Vibration of Mindlin Plates Programming the p-Version Ritz Method
K.M. LlEW School of Mechanical and Production Engineering Nanyang Technological University, Nanyang Avenue Singapore C.M. WANG Department of Civil Engineering The National University of Singapore, Kent Ridge Singapore Y. XIANG School of Civic Engineering and Environment The University of Western Sydney, Nepean, Kingswood Australia
S. KlTlPORNCHAl Department of Civil Engineering The University of Queensland, Brisbane Australia
1998 ELSEVIER Amsterdam - Lausanne - New York - Oxford Shannon - Singapore - Tokyo
-
ELSEVIER SCIENCE Ltd The Boulevard, Langford Lane Kidlington, Oxford OX5 1GB, UK 91998 Elsevier Science Ltd. All rights reserved. This work and the individual contributions contained in it are protected under copyright by Elsevier Science Ltd, and the following terms and conditions apply to its use: Photocopying Single photocopies of single chapters may be made for personal use as allowed by national copyright laws. Permission of the publisher and payment of a fee is required for all other photocopying, including multiple or systematic copying, copying for advertising or promotional purposes, resale, and all forms of document delivery. Special rates are available for educational institutions that wish to make photocopies for non-profit educational classroom use. Permissions may be sought directly from Elsevier Science Rights & Permissions Department, PO Box 800, Oxford OX5 1 D X , UK; phone: (+44) 1865 843830, fax: (+44) 1865 853333, e-mail:
[email protected]. You may also contact Rights & Permissions directly through Elsevier's home page (http://www.elsevier.nl), selecting first 'Customer Support', then 'General Information', then 'Permissions Query Form'. In the USA, users may clear permissions and make payments through the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923, USA; phone: (978) 7508400, fax: (978) 7504744, and in the UK through the Copyright Licensing Agency Rapid Clearance Service (CLARCS), 90 Tottenham Court Road, London W1P 0LP, UK; phone: (+44) 171 436 5931; fax: (+44) 171 436 3986. Other countries may have a local reprographic rights agency for payments. Derivative Works Subscribers may reproduce tables of contents for internal circulation within their institutions. Permission of the publisher is required for resale or distribution of such material outside the institution. Permission of the publisher is required for all other derivative works, including compilations and translations. Electronic Storage or Usage Permission of the publisher is required to store or use electronically any material contained in this work, including any chapter or part of a chapter. Contact the publisher at the address indicated. Except as outlined above, no part of this work may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without prior written permission of the publisher. Address permissions requests to: Elsevier Science Rights & Permissions Department, at the mail, fax and email addresses noted above. Notice No responsibility is assumed by the Publisher for any injury and/or damage to persons or property as a matter of products liability, negligence or otherwise, or from any use or operation of any methods, products, instructions or ideas contained in the material herein. Because of rapid advances in the medical sciences, in particular, independent verification of diagnoses and drug dosages should be made. First edition 1998 Library of Congress Cataloging in Publication Data A catalog record from the Library of Congress has been applied for. British Library of Cataloguing in Publication Data A catalogue record from the British Library has been applied for. ISBN: 0 08 043341 3 | paper used in this publication meets the requirements of ANSI/NISO Z39.48-1992 (Permanence of Paper). Printed in The Netherlands.
FOREWORD Having been involved myself with the study of plate vibrations for some four decades, I am especially pleased to see this monograph which is based entirely upon the Mindlin Theory. A tremendous amount of research has taken place on plate vibrations. My own monograph, completed in 1967 and published in 1969, presented frequencies and mode shapes taken from approximately 500 references. Since then at least 2000 additional relevant publications have appeared; however, the vast majority of these, on the order of 90 percent I would estimate, consider only thin plates. The present book deals with thick plates, although thin plates are also accounted for. A plate is typically considered to be thin when the ratio of its thickness to representative lateral dimension (e.g., circular plate diameter, square plate side length) is 1/20 or less. In fact, most plates used in practical applications satisfy this criterion. This usually permits one to use classical, thin plate theory to obtain a fundamental (i.e., lowest) frequency with good accuracy. However, the second frequency of a plate with thickness ratio of 1/20, determined by thin plate theory, will not be accurate. It will be somewhat too high. And the higher frequencies will typically be much too h i g h - too high to be of practical value. The inaccuracies described above are largely eliminated by use of the Mindlin theory, for it does include the effects of additional plate flexibility due to shear deformation, and additional plate inertia due to rotations (supplementing the translational inertia). Both effects decrease the frequencies. There are still other effects not accounted for by the Mindlin theory (e.g., stretching in the thickness direction, warping of the normals to the midplane), but these are typically unimportant for the lower frequencies until very_ thick plates are encountered. For such situations a three-dimensional analysis should be used. Some of my students and I have made such analyses during the past three decades. As for all boundary value problems, a few exact solutions for plate vibration problems exist in rectangular and polar coordinates, applicable to some cases of rectangular, circular, annular and sectorial plates. But for the vast majority of problems, including these shapes, approximate solutions must be found. The present monograph uses the well-known Ritz method exclusively. Displacements are assumed in the form of algebraic polynomials which satisfy the geometric boundary conditions, a procedure that has been effectively used for at least a half century. If this is done properly, then one can approach the exact frequencies and mode shapes as closely as desired as sufficient polynomial terms are utilized. The present monograph lays out the Mindlin theory briefly, including the appropriate equations in polar, rectangular, and skew coordinates. In each chapter it is shown how the procedure (Ritz method, with algebraic polynomial displacement functions) may be applied straightforwardly to solve a host of free vibration problems. In a series of researches during the past decade, resulting in numerous published papers, the authors have developed further the algebraic equation manipulation procedures previously initiated by others (most notably
vi Professor Yoshihiro Narita of Sapporo, Japan), which results in the rather general computer programs displayed throughout this book. The authors go one step further by presenting extensive numerical results - frequencies for circular, annular, sectorial, elliptical, triangular, parallelogram and trapezoidal plates, all according to the Mindlin theory. This serves several purposes: It permits one to verify the correctness of the computer programs listed, and of one's utilization of them. 2.
Considerable new, previously unpublished, frequency data are presented. The effects of shear deformation and rotary inertia may be readily seen. The tables typically give frequencies for thin, as well as thicker, plates.
.
Using the accurate, benchmark data presented, one may determine the accuracy of other approximate methods, especially finite element codes which take various forms.
I congratulate the authors for having taken the time and effort to produce this work. It should be useful to many persons.
Arthur Leissa Columbus, Ohio March 1, 1998
vii
PREFACE Ever since Chladni in 1787 observed nodal pattems on square plates at their resonant frequencies, there has been a tremendous research interest in the subject of plate vibrations. To date, abundant thin plate vibration solutions based on the Kirchhoff plate assumptions are available in the literature. A good reference source on this subject may be found in the monograph entitled "Vibration of Plates" by Professor Leissa of The Ohio State University. This invaluable document, initially published by NASA in 1969 and recently reprinted by the Acoustical Society of America in 1993 due to a great demand, presents mainly vibration results based on the Kirchhoffplate theory. This classical plate theory, however, overpredicts all the vibration frequencies for thick plates, and the higher frequencies for thin plates, as it neglects the effects of transverse shear deformation and rotary inertia. This shortcoming of the Kirchhoff theory forced researchers to develop more refined plate theories. As a result, we now have many such theories ranging from the first-order shear deformation plate theory of Mindlin to higher-order plate theories such as the one proposed by Reddy. Recent advances into this subject of plate vibration have focused more on these shear deformable plates that are somewhat complicated to analyse. This trend in plate research is further fueled by the availability of powerful digital computers that permit large numbers of variables to be processed within a relatively short time. Over the last several years, the four authors have jointly conducted research into the analysis of vibrating Mindlin plates as a collaborative project between Nanyang Technological University, The National University of Singapore, and The University of Queensland. The research was prompted by the fact that there is a dearth of vibration results for Mindlin plates when compared to classical thin plate solutions. To generate the vibration results, the authors have successfully employed the Ritz method for general plate shapes and boundary conditions. The Ritz method, once thought to be awkward for general plate analysis, can be automated through suitable trial functions (for displacements) that satisfy the geometric plate boundary conditions a p r i o r i . This work has been well-received by academicians and researchers, as indicated by the continual requests of the authors' papers and the Ritz software codes. The present monograph is written with the view to share this socalled p-Ritz method for the vibration analysis of Mindlin plates and its software codes with the research community. To the authors' knowledge, the monograph contains the first published Ritz plate software codes of its kind. Since it is a voluminous task to provide engineers and researchers with vibration solutions of Mindlin plates of various shapes and boundary conditions, the software codes listed in this monograph enable easy generation of the required results. The classical plate solutions can be readily computed from the software by setting the plate thickness to a small value. As it is more convenient to handle certain plate shapes in their natural coordinate systems, four versions of the p-Ritz software are given. The software code VPRITZP1 is based on a one-dimensional polar coordinate system for solving axisymmetric plate problems. VPRITZP2 allows the analysis of nonaxisymmetric plates in polar coordinates. VPRITZRE is based on the rectangular Cartesian coordinate system, and the software can be used to analyse any plate shape whose edges are defined by polynomial functions. Finally VPRITZSK is based on the skew coordinate system that is expedient for handling
viii parallelogram plates and plates having parallel oblique edges. Although the software codes are written for isotropic plates, they may be readily modified for laminated plates and for complicating effects such as initial stress effects, foundation effects, etc. The programs can also be modified to accommodate the bending and buckling analyses of Mindlin plates. The authors would like to thank Professor A.W. Leissa for providing useful comments and for writing the Foreword to this book, Dr C.W. Lim for generating the vibration mode shapes, Dr K.K. Ang for useful comments on the software code, Mr W.H. Traves for proofreading the manuscript, and finally to our wives for their patience and support.
K.M. Liew Nanyang Technological University, Singapore C.M. Wang The National University of Singapore, Singapore Y. Xiang The University of Westem Sydney Nepean, Australia S. Kitipornchai The University of Queensland, Australia
ix
CONTENTS FOREWORD PREFACE
V
vii
INTRODUCTION
1.1 Background of vibration 1.2 Plate vibration 1.3 About this monograph MINDLIN PLATE T H E O R Y AND RITZ M E T H O D
5
2.1 Mindlin plate theory 2.1.1 Displacement components 2.1.2 Strain-displacement relations 2.1.3 Stress resultant-displacement relations 2.1.4 Energy functionals 2.1.5 Governing equations of motion 2.1.6 Boundary conditions 2.2 Relations between Kirchhoff and Mindlin plates 2.2.1 Reduction of Mindlin theory to Kirchhoff 2.2.2 Frequency relationship for a class of plates 2.3 Shear correction factor 2.4 Ritz method 2.4.1 Preliminary remarks 2.4.2 Application of Ritz method to Mindlin plates
5 6 7 7 8 9 12 15 15 16 23 24 24 25
F O R M U L A T I O N IN P O L A R COORDINATES
3.1 Introduction 3.2 Energy functionals 3.3 Eigenvalue equation 3.3.1 Circular and annular plates 3.3.2 Sectorial and annular sectorial plates 3.4 Computer program 3.4.1 Software code: VPRITZP1 3.4.2 Sample files for VPRITZP1 3.4.3 Software code:VPRITZP2 3.4.4 Sample files for VPRITZP2 3.5 Benchmark checks 3.5.1 Annular plates 3.5.2 Sectorial plates 3.5.3 Annular sectorial plates
27 27 33 35 35 37 40 40 54 56 71 74 74 74 76
F O R M U L A T I O N IN R E C T A N G U L A R COORDINATES
89
4.1 Introduction 4.2 Energy functionals 4.3 Eigenvalue equation
89 92 93
4.4 Computer program 4.4.1 Software code: VPRITZRE 4.4.2 Input file 4.4.3 Output file 4.5 Benchmark checks 4.5.1 Isosceles triangular plates 4.5.2 Trapezoidal plates 4.5.3 Elliptical plates
96 96 108 113 118 118 118 118
F O R M U L A T I O N IN S K E W C O O R D I N A T E S
133
5.1 5.2 5.3 5.4 5.5
Introduction Skew coordinates transformation Energy functional in skew coordiantes Eigenvalue equation Computer program 5.5.1 Software code: VPRITZSK 5.5.2 Sample files 5.6 Benchmark checks
133 133 134 135 137 138 153 156
PLATES W I T H C O M P L I C A T I N G E F F E C T S 6.1 Introduction 6.2 Initial inplane stresses 6.3 Elastic foundations 6.4 Stiffeners 6.5 Nonuniform thickness 6.6 Line/curved/loop internal supports 6.7 Point supports 6.8 Mixed boundary conditions 6.9 Reentrant corners 6.10 Perforated plates 6.11 Sandwich construction
165
165 165 167 169 173 175 176 177 178 179 179
REFERENCES
183
RELEVANT REFERENCE BOOKS
189
APPENDIX I - GAUSSIAN QUADRATURE SUBROUTINES
191
A P P E N D I X II - S U B R O U T I N E S F O R M A T H E M A T I C A L O P E R A T I O N S ON POLYNOMIALS
197
SUBJECT INDEX
201
CHAPTER ONE
INTRODUCTION
1.1
BACKGROUND OF VIBRATION
Vibration, in mechanics, is the to and fro motion of an object. Examples of vibration abound in nature as nearly everything vibrates; though some vibrations may be too low or too weak for detection. Vibration can be felt by the sense of touch when a vehicle passes by or felt by our eardrums when a guitar string is being plucked. Large vibrations occur during earthquakes and when the ocean level rises and falls causing tides. Vibration can be exploited for useful tasks, such as the use of a vibrator to massage the body, to compact loose soil, to increase the workability of wet concrete and to shake sugar, pepper and salt from their containers. On the other hand, vibration can cause discomfort for people and problems for machines. Too much vibration can cause people to loose concentration and to fall sick. In machines, vibration causes wear and tear and can even cause the malfunctioning of the machine. In view of the intensive use of structural components in various engineering disciplines, especially in the aerospace, marine and construction sectors, a thorough understanding of their vibratory characteristics is of paramount importance to design engineers in order to ensure a reliable and lasting design. The negligence of considering vibration as a design factor can lead to excessive deflections and failures. An unforgettable incident showing the destructive nature of vibration is the dramatic collapse of Tacoma Narrows Bridge in 1940 that was captured on film. Other failures due to wind induced vibrations include collapse of chimneys, water tanks, transmission towers, etc. There are also failures triggered by seismic shocks leading to large-scale destruction of cities such as the 1995 Kobe earthquake. The vibration design aspect is even more important in micromachines such as electronic packaging, micro-robots, etc. because of their enhanced sensitivities to vibration.
1.2
PLATE VIBRATION
The study of plate vibration dates back to the early eighteenth century, with the German physicist, Chladni (1787), who observed nodal patterns for a flat square plate. In his experiments on the vibrating plate, he spread an even distribution of sand which formed regular patterns as the sand accumulated along the nodal lines of zero vertical displacements upon induction of vibration. In the early 1800s, Sophie Germain, a French mathematician, obtained a differential equation for transverse deformation of plates by means of calculus of variations. However, she made the error of neglecting the strain energy due to the warping of the plate midplane. The correct version of the governing differential equation, without its derivation, was found posthumously among Lagrange's notes in 1813. Thus, Lagrange has been credited as being
2
Sec. 1.2 Plate Vibration
the first to use the correct equation for thin plates. Navier (1785-1836) derived the correct differential equation of rectangular plates with flexural resistance. Using trigonometric series introduced by Fourier around that time, Navier was able to readily determine the exact bending solutions for simply supported rectangular plates. Poisson (1829) extended Navier's work to circular plates. The extended plate theory that considered the combined bending and stretching actions of a plate has been attributed to Kirchhoff (1850). His other significant contribution is the application of the virtual displacement method for solving plate problems. Lord Rayleigh (1877) presented a theory to explain the phenomenon of vibration which to this day has been used to determine the natural frequencies of vibrating structures. Based on the plate assumptions made by Kirchhoff (1850) and Rayleigh's theory, early researchers used analytical techniques to solve the vibration problem. For example, Voigt (1893) and Carrington (1925) successfully derived the exact vibration frequency solutions for a simply supported rectangular plate and a fully clamped circular plate, respectively. Ritz (1909) most probably was one of the early researchers to solve the problem of the freely vibrating plate which does not have an exact solution. He showed how to reduce the upper bound frequencies by including more than a single trial (admissible) function and performing a minimization with respect to the unknown coefficients of these trial functions. The method became known as the Ritz method. Improving on the Kirchhoff plate theory, Hencky (1947) and Reissner (1945) proposed a first order shear deformation plate theory to cater to thick plates where the effect of transverse shear deformation is significant and thus cannot be neglected. Mindlin (1951) presented a variational approach for deriving the governing plate equation for free vibration of first-order shear deformable plates and incorporated the effect of rotary inertia. The first order shear deformation plate theory of Mindlin, however, requires a shear correction factor to compensate for the error due to the assumption of a constant shear strain (and thus constant shear stress) through the plate thickness that violates the zero shear stress condition at the free surfaces. The correction factors not only depend on material and geometric parameters but also on the loading and boundary conditions. The study of Wittrick (1973) indicates that it may be impossible, in general, to obtain the shear correction factors for a general orthotropic plate. A more refined plate theory that does away with the shear correction factor is that proposed by Reddy (1984, 1997). His third-order shear deformation theory ensures that the zero shear stress condition at the free surfaces of the plate is satisfied at the outset. Even higher-order theories have also been proposed, but the tractability of solving the equations become too difficult to warrant the relatively small improvement in the accuracy of the plate solutions. Owing to the technological advances in recent years, plate elements are commonly selected as design components in many engineering structures because of their ability to resist loads by two-dimensional structural action. With the evolution of light plate-structures, tremendous research interests in vibration of plates are generated. From what has been done, plates of almost any conceivable shape, support and loading conditions have been investigated. Along with this, various analytical and numerical methods have been proposed. Of these, the finite element method is the most commonly used because of its versatility to handle any plate shape and boundary conditions. The use of the finite element method started around the mid of 1950s. In 1956, Turner, Clough, Martin and Topp introduced the method, which allows the numerical solution of complex plate and shell problems in an efficient way. Numerous contributions in this field are also due to Argyris (1960) and Zienkiewicz (1977). In recent years, especially, the Ritz method has been shown to be an efficient alternative to other numerical techniques for the free vibration analysis of plates of arbitrary shape and
Chap. 1 Introduction
3
boundary conditions. This is made possible by using a set of geometrically generated Ritz functions that automatically satisfy the geometric boundary conditions. The development of the Ritz method for a single general plate brings us a step closer towards the ultimate goal of generalizing the Ritz method for the analysis of complicated plate-structures.
1.3
ABOUT THIS MONOGRAPH
This monograph provides software codes for the free vibration analysis of thick plates. The computer programs were written based on the p-Ritz method. The Mindlin plate theory was employed to incorporate the effects of transverse shear deformation and rotary inertia. Chapter 2 presents the plate theory of Mindlin and its underlying assumptions. The goveming plate equations and the boundary conditions were derived using the Hamilton's principle. Also highlighted herein is the existence of an exact relationship between the frequencies of the classical thin (Kirchhoff) plates and Mindlin plates of polygonal shape and simply supported for all the straight edges. The relationship allows one to obtain the vibration frequencies of Mindlin plates from widely available Kirchhoff plate solutions. The shear correction factor required in the Mindlin plate theory is discussed. The implementation of Mindlin plate theory into the Ritz method is detailed. Chapter 3 gives the Ritz formulation for plate analysis in a polar coordinate system. Such a polar coordinate formulation is expedient for circular, annular and sectorial plates. Some exact solutions for circular and annular Mindlin plates are given for validation purposes. The software codes VPRITZP 1 and VPRITZP2 are provided with illustrative input and output files. The former code is designed for the analysis of axisymmetric plates and the latter for non-axisymmetric plates. Tables of vibration frequencies are also given for sectorial and annular sectorial plates with the view to providing benchmark results. Chapter 4 details the Ritz formulation in a rectangular coordinate system. This coordinate system is the most commonly used as it can readily handle almost any plate shape. The software code VPRITZRE is given with illustrative examples. Benchmark vibration frequencies are also presented for isosceles triangular plates, trapezoidal plates and elliptical plates. Chapter 5 fumishes the Ritz formulation in a skew coordinate system. This coordinate system is useful for plates with oblique parallel edges. The software code VPRITZSK is given with an example. Vibration frequencies for skew plates with various boundary conditions are also presented. Finally, Chapter 6 discusses the treatment of various complicating effects such as inplane stresses, an elastic foundation, presence of stiffeners, non-uniform thickness, line/curved/loop intemal supports, point supports, mixed boundary conditions, re-entrant comers, perforations and sandwich construction.
This Page Intentionally Left Blank
CHAPTER TWO
MINDLIN PLATE THEORY AND RITZ METHOD
2.1
MINDLIN PLATE TIIEORY
In the well-known classical thin plate or Kirchhoffplate theory for vibration, the following assumptions have been made (Kirchhoff 1850):
9 No deformation occurs in the midplane of the plate; 9 Transverse normal stress is not allowed; 9 Normals to the undeformed midplane remain straight and normal to the deformed midplane and unstretched in length; and 9 The effect of rotary inertia is negligible. The assumption regarding normals to the midplane remaining normal to the deformed plane amounts to neglecting the effect of transverse shear deformation. This effect, together with the rotary inertia effect, become important when the plate is relatively thick or when accurate solutions for higher modes of vibration are desired. Wittrick (1987) pointed out that excluding edge effects, the error in the Kirchhoff plate theory is O(hZ/fl 2) where h is the thickness and /,t is a typical half-wavelength of the vibrating plate. If the Kirchhoff plate theory is used, the frequency responses are overpredicted. A more refined plate theory is thus necessary for thick plate analysis. There have been many thick (shear deformable) plate theories proposed with the implicit objective of reducing the error to less than O(h 2/t~2 ). Reissner (1944, 1945) proposed the simplest thick plate theory by introducing the effect of transverse shear deformation through a complementary energy principle. Unlike Reissner's work, Mindlin (1951) presented a first-order theory of plates where he accounted for shear deformation in conjunction with a shear correction factor. In this theory, the first two Kirchhoff assumptions are maintained. To allow for the effect of transverse shear deformation, the theory relaxes the normality assumption so that
Normals to the undeformed midplane remain straight and unstretched in length but not necessarily normal to the deformed midplane. This assumption implies a non-zero transverse shear strain, but it also leads to the statical violation of zero shear stress at the free surfaces since the shear stress becomes constant through the plate thickness. To compensate for this error, Mindlin (1951) proposed a shear correction factor Ic2 to be applied to the shear force. Besides, Mindlin (1951) modified the fourth assumption so that the
6
Sec. 2.1 Mindlin Plate Theory 9 Effect o f rotary inertia is included
In the literature, vibrating plates based on the first-order shear deformation plate theory assumptions are widely referred to as Mindlin plates. 2.1.1
DISPLACEMENT COMPONENTS
In the Mindlin plate theory, the displacement components are assumed to be given by: u(x, y , z , t ) = zNx(x, y,t )
(2.1a)
v(x, y , z , t ) = Zp'y (x, y,t)
(2.1b)
~(x, y , z , t ) = w(x, y,t)
(2.1c)
where t is the time, u, v are the inplane displacements, w the transverse displacement and ~x, ~y the bending rotations of a transverse normal about the y and x axes, respectively, as shown in Fig. 2.1. The notation that Nx represents the rotation about the y-axis and vice versa may be confusing to some and in addition they do not follow the right-hand rule. However, these notations will be used herein because of their extensive use in the open literature. Note that by setting r = - d w / d x and p,y = - dw/dy, the Kirchhoff plate theory may be recovered. For higher-order plate theories, higher-order polynomials are used in the expansion of the displacement components through the thickness of plate (see, for example, papers by Nelson and Lorch 1974, Lo et al. 1977, Levinson 1980, Reddy 1984, Lim et al. 1989). Notable among them is the one proposed by Reddy (1984, 1997) who derived the displacement field by imposing zero transverse shear strain condition at the free surfaces a priori to the expanded inplane displacements up to the third power for the thickness coordinate. Based on this displacement field, he derived variationally consistent equations and boundary conditions for the so-called Reddy (third-order shear deformation) plate theory.
c%v ax
~x
LZ x Fig. 2.1 Rotations of the normals
Chap. 2 M i n d l i n P l a t e T h e o r y a n d Ritz M e t h o d
7
2.1.2 S T R A I N - D I S P L A C E M E N T RELATIONS In view of Eq. (2.1), the linear components of the engineering (non-tensorial) strains can be expressed as c3~,x
~x~ = z ~ &
s
:Z
(2.2a)
(~/'Y Oy
(2.2b)
ezz = 0
(2.2c)
}'xy : Z
+ OW
7 " = ~'x + Y yz "-- ~bCy "[-
(2.2d) (2.2e)
aX OW
(2.20
cry
where c a , Cyy,Czz, are the normal strains and Yxy, Yxz, Yyz, the shearing strains. 2.1.3 STRESS R E S U L T A N T - D I S P L A C E M E N T RELATIONS Based on the above strain-displacement relations and assuming a plane stress distribution in accordance with Hooke's law, the stress-resultants are obtained by integrating the stresses: M xx =
J-h~2
Crxxz dz =
d-h~2
I_V 2
(2.3a)
M y y = J-h~2
=D
M ~y =
o ' y y z d z = d-h~2
1-v
+v
(2.3b)
f h/2 f h/2 %, z dz = G T ~yz dz l-h~2 9 ,l-h~2
D(I- v) &,x +
J-h/2 rxz d z = K G h ~'x +
(2.3c)
(2.3d)
8
Sec. 2.1 Mindlin Plate Theory =
"['yz
.l-h~2
dz =
tf2Gh
~l'y Jr-
(2.3e)
where Mx~, Myy, Mxy are the bending moments per unit length of plate, Qx,Qy the transverse shear forces per unit length of plate, Crx~,Oyythe normal stresses, rxy,rxz,ryz the shear stresses, h is the plate thickness, E the modulus of elasticity, G = E/[2(1 + v)] the shear modulus, v the Poisson ratio, D = Eh3/[120-v2)] the flexural rigidity and tr 2 the shear correction factor to compensate for the error in assuming a constant shear stress throughout the plate thickness. A discussion of the shear correction factor will be given in the sequel. The stresses, bending moments and shear forces are shown in Fig. 2.2 in their positive senses. 2.1.4 ENERGY FUNCTIONALS The strain energy functional U due to bending of the Mindlin plate is given by
6r B6dV
u=lf -
2
(2.4)
v
Z
Z
,xy I ' [ ' ~ _ l
"
O'xx
i i
Mxy ~QY.
Y x
O'nn
J'k "~_
x "
Mxx+
i~
- ~~
? xx a~ /
M xv+ Y
C3Mx" " dx OX
/ ....
~,,"xy
Q d x ~
9 ~M -
xu
yy l
\ ~
Ox
~
I
x
Y
C3Mxy 092
ely
0 +"~Y d~
,, C3Myy . Myy"]- Oy ay
Fig. 2.2 Stresses, bending moments and shear forces of a plate
where c r = {Cx~eyy YxyYxzYyz}, V is the plate volume and the material property matrix B for an isotropic elastic plate is given by
Chap. 2 Mindlin Plate Theory and Ritz Method vE
E l_v 2
1 --V 2
E 1--V 2
B
0
0
0
0
0
0
__
9
(2.5) 0
0
K.2G
0
G
K.2G
symmetrical
The substitution of Eqs. (2.2) and (2.5) into Eq. (2.4), and after the integration over the plate thickness, yields U = -1 2
D
Ogx + e?gy v3c ~
- 2(1 - v) O~,x C)~y v3c 03,
1
O~x
4
@
+
d~y &
A
+ tc2Gh ~ +
+ ~y +
dA
(2.6)
where A is the plate area, and dA = dxdy. The kinetic energy T of the vibrating Mindlin plate is given by T =1 IpI(--~-/2 2
+
("~/2
+
(-~/21
(2.7)
dV
v
where t denotes time, p the mass density (per unit volume). By substituting Eqs. (2.1a-c) into Eq. (2.7), and integrating through the thickness dimension, the kinetic energy T may be expressed as
--&
+--~ [k, Ot )
( Ot )
dA
(2.8)
The Lagrangian FI is thus given by 1-I = T - U 2.1.5
(2.9)
GOVERNING EQUATIONS OF MOTION
The governing equations of motion may be derived from the Hamilton's principle which requires 6 I,/'f YIdt = 0
(2.10)
10
Sec. 2.1 Mindlin Plate Theory
where 6 is the variational operator. Note that Hamilton's principle states that of all the paths of admissible configurations that the body can take as it moves from configuration "i" at time ti to configuration "f" at time t I , the path that satisfies Newton's second law at each instant during the interval is the path that extremizes the time integral of the Lagrangian during the interval. The substitution of Eqs. (2.6), (2.8), (2.9) into Eq. (2.10) yields
- ~
2
Oy
-tf2Gh
+
Ox
Nx +
Oy
+
d~Y'x }'-~x
Ox -}- ~ll'y q-
6~bry +
----+Owc36wPhZCONx C36Nx F any c36NY)}dAdt=0 +__oh Ot c3t 12 ~. 3t c3t c3t c3t
(2.11)
Performing integration by parts, Eq. (2.11) results in
9{ It i +
fi 2o2 3 ~x
D
6~x +
3 Ny
d ~x
6Ny + v
3 ~y 6~x
i
D(1 - v) (c72Nx s s 2 ~/)rx 021//y 61//'x ] 2 ~ & 2 61/]'x nt- O~X2 6~]'y nt" ~ & 6[pCy nt- O'~&
)
- x 2Gh Nx rNx
ONXfw+Ny rNy _ fiw+ ax Of ox
\
02W
~
d2W
- ~----r~w+-g~,,--g-~w - ph--~-fw-
fdt i +
6Ny + v
D
12
Ot 2
6NxdY-
x
)
J 6Nx +
c3t2
/t
6Ny dAdt
6Nydx- v
OX
6Nydx + v O~y &&dy) @
D(1- v) ( aNx ONx any oN, ) 6NxdX+ 6Nydy 6NxdX+ fig/y@ 2 -~ Oy --~-x c3x (2.12)
where F is the boundary path.
Chap. 2 Mindlin Plate Theory and Ritz Method
11
By grouping the terms in the foregoing functional with respect to the variation terms, we have tz ~
I ti
{I 2 D
0 ~x OX 2
+v
~'y
"t-
Oxdy
- Ph---~30Ot 2 2 6p'x + D .~_
2
Ox2
~t-
Ox
D
fJti
~r
+
-- I~ 2 G h
02~x OY2 +
My Ow -- tfZGh I//x + Oxdy -~x
,5,
Oy
~Oey +
-
12
+
Ox ~
dy+v
Iv)
2
cTY2 + v c3cc32
c3xdy
+ tc2Gh C3~x + - -
D(1
~)
dy-
-ph
2
+ - D C~y dx+vCT~xdx + c~ cgx + tr2Gh p,'xdy+---~dy-~tydx-
fiw dAdt
Oy
dx+
c3x
dy+
2
6~bCy
Ot2
dx 5~x
dy 6gy
dx 6w dt = 0
(2.13)
Equating the coefficients of the variation terms to zero for the functional over the plate area and assuming free harmonic motion, the following three goveming equations of motion (after omitting the factor e i~ ) are obtained: D(1-V)v 2
( l + v ) 0(I)
D(1 v ) z
(l+v)0cI)
2
~ x + - - - - - t r Ox
v~,~+
~
2
(
~x)
(
~)
Gh ~x +
~ - , c ~ C h ~ty +
tc2 Gh(V2 w + ~ ) = -phco 2w
ph3co2
= - 12
ph3
~x
2
= - 12 coV/~
(2.14a)
(2.14b)
(2.14c)
where the right hand sides of Eqs. (2.14a) and (2.14b) are the rotary inertia terms, co is the angular frequency of vibration in radians per second, V 2(,) = 8 2(,)/c3x 2 + 0 2(*)/c~ 2 is the two-dimensional Laplacian operator and
~ = D ( ONxcgx+ c~Y)c~= M~x(I+v)+Myy
(2.15)
12
Sec. 2.1 Mindlin Plate Theory
The auxiliary function 9 may be referred to as the Mindlin Marcus-moment (or moment sum). Marcus (1932) proposed the moment sum so as to convert the fourth-order differential plate equation of classical theory into two Poisson equations. The governing equations of motion may also be expressed in terms of the stressresultants [defined by Eqs. (2.3a-e)] as follows: OMx,
OMxy
-Qx
OMyy
0)14xy
Oy
Ox
~ +
OQx
2.1.6
+
-ay
ph 3
= - ~
ph 3
= - ~
cO2gx
(2.16a)
cO2gy
(2.16b)
12
OQy +~=-phco
2 w
(2.16c)
BOUNDARY CONDITIONS
For boundary conditions, the line integral of Eq. (2.13) is set to zero, i.e.
@
1
+
2
Oy
+~
@ Ox
6~ydy-~
2
ox j Oy
+
Ox
6~xdx
(2.17)
In view of the stress-resultants expressions given in Eqs. (2.3a-e), Eq. (2.17) leads to
+ OxaWdy - O, awdx }dt = O
(2.18)
Considering a portion of the path F, as shown in Fig. 2.3, the rectangular coordinates (x, y) are related to the normal and tangential coordinates (n, s) by dx = - sin 0 ds dy = cos0 ds
(2.19a) (2.19b)
In view of Eq. (2.19), Eq. (2.18)can be further written as
~t,tl ~ {M= cos 08gx + Myy sin 08gy + M~y cos 08gy + M,y sin 06g + Qx cos ONv + Qy sin ONv}dsdt = 0
(2.20)
Chap. 2 Mindlin Plate Theory and Ritz Method
13
The bending rotations can be expressed in terms of their normal-tangential counterparts by the following relations g x = ~. cos 0 - ~"s sin 0
(2.21a)
y = ~. sin 0 + ~/s cos 0
(2.21b)
where the subscripts n, s denote the normal and tangential directions, respectively, gs the rotation of the midplane normal in the tangent plane sz to the plate edge and g , the rotation of the midplane normal to the edge.
Fig. 2.3 Rectangular coordinates and normal-tangential
By substituting Eq. (2.21) into Eq. (2.20), one obtains
sT / ooos0(oosO .-sinO
+
-- 0
(2.40a) (2.40b)
Chap. 2 Mindlin Plate Theory and Ritz Method
17
where i = 1 if j = 2 and vice versa. For the hard type of simply supported (S) polygonal plate, the boundary conditions are given by Eqs. (2.27a-c). Since along the straight edge ~, = 0 implies that c3~, /Os = 0, then together with the condition M,, = 0, one may deduce that c3g//On = 0. In view of this fact and Eq. (2.14c), the boundary conditions may be given as w = O, 9 = O, V 2w = O, ~ = 0 on the boundary.
(2.41a-d)
The following governing equation for the vibrating Kirchhoff plate is given by Eq. (2.32) or may be obtained from Eq. (2.37) by setting tc 2 ~ oo and omitting the rotary inertia
term [=(ph3 go2V2w)/(12D) ]
+yX -y>-o
(2.42)
y2 = Ph~)______~ 2
(2.43)
D For a simply supported polygonal Kirchhoff plate, the deflection and the Kirchhoff Marcus moment are zero at the boundary, i.e. ]~ -" 0, V 21,~ = 0
on the
(2.44a,b)
boundary.
As pointed out by Conway (1960), and later proven by Pnueli (1975), the frequency solutions of the fourth order differential equation (2.42) and the boundary conditions given by Eq. (2.44) are the same as those given by solving simply the following second order differential equation, (V 2 + )7> = 0
(2.45)
and the boundary condition if, = 0. Owing to the mathematically similarity of Eqs. (2.40b) and (2.41d) with Eqs. (2.45) and (2.44a), it follows that the aforementioned vibration Mindlin plate problem is analogous to the vibration Kirchhoff plate problem. Thus, for a given simply supported, polygonal plate Yj = )7
(2.46)
The substitution of Eqs. (2.39) and (2.43) into Eq. (2.46) furnishes the frequency relationship between the two kinds of plates,
C02N= - -
ph
-
1+
1+
ff)Nh2
-i2
ff_)Nh2
l
1 + ~ tc2(l-v)
+
~
tc (1 - v)
--
3tr
2Gff)N2
(2.47)
18
Sec. 2.2 Relations Between Kirchhoff and Mindlin Plates
where N = 1,2,...., corresponds to the mode sequence number. If the rotary inertia effect is neglected, it can be shown that the frequency relationship simplifies to ~2
^2
coN
coN "--
ff)Nh 2
1+ 6(1:v)-K2
~ph
(2.48)
D
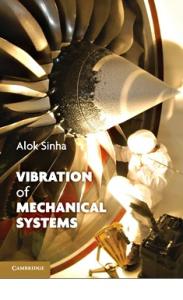
where cb is the frequency of Mindlin plate without the rotary inertia effect. This frequency value cb is greater than its corresponding co but smaller than o3. Graphical representations of the frequency relationships given by Eqs. (2.47) and (2.48) are shown in Fig. 2.4, where v=0.3 and tr 2 = 5 / 6 have been assumed. By nondimensionalizing the circular frequency using p,h and D , the curves shown in Fig. 2.4 become independent of the plate shape! Note that as one moves along the curves away from the origin, the plate gets thicker or the frequency value becomes higher. It is clear from the figure that when the frequencies are low (lower modes of frequency or thin plates), the Mindlin solutions are close to the Kirchhoff solutions. When the plate thickness increases and for higher mode frequencies, the Mindlin solutions decrease relative to the Kirchhoff solutions. The effect of rotary inertia is also shown in the same figure and it can be seen that this effect becomes significant for high frequency values. Although the relationship given in Eq. (2.47) is exact only for polygonal plates with straight edges, it has been shown by Wang (1994) that the relationship provides reasonably accurate frequencies for Mindlin plates from Kirchhoff solutions even when the simply supported edges are curved. This relationship enables a quick deduction of simply supported Mindlin plate frequencies from the abundant Kirchhoff plate vibration solutions. It may be used as a basic form in which approximate formulas may be developed for predicting the Mindlin plate frequencies for other boundary conditions. Moreover, the exact relationship provides a useful means to check the validity, convergence and accuracy of numerical results and software. Note that Wang et al. (1998) have also established a similar frequency relationship between Kirchhoff plates and Reddy plates. Conway (1960) pointed out the analogies between the vibration problem of the Kirchhoff plate, the buckling problem of Kirchhoff plate and the vibration problem of uniform prestressed membranes. Owing to these existing analogies, one may choose to substitute into Eq. (2.47) the buckling solution for the corresponding simply supported Kirchhoff plate under hydrostatic inplane load, or the frequency of the corresponding uniformly prestressed membrane, instead of the Kirchhoff plate frequency. In other words, o3N may take any one of the following expressions:
_
NN
_(~NIUl D
(2.49)
-i ph
where N N is the buckling load for the N-th mode,
(/)N
the N-th frequency of the vibrating
prestressed membrane, p the mass density per unit area of membrane and T the uniform tension per unit length of membrane.
Chap. 2 Mindlin Plate Theory and Ritz Method
Kirchhoff plate \
5 tt~
/ ~
19
Mindlin plate (without rotary ia) 9
4
ID
E
3 //"~.... 2
o
Mindlin plate ~ ( w i t- h " '" ary inertia)
1
.E t
i
i
J
3
4
5
6
.,..~
0
1
2
Kirchhoff frequency parameter, o3 V'(phS/D)
Fig. 2.4 Frequency relationships between Mindlin and Kirchhoff plates
Owing to the importance of having exact solutions for checking the convergence and accuracy of numerical results, highly accurate simply supported Kirchhoff (classical thin) plate frequencies for various polygonal shapes are presented in Tables 2.1-2.4. These Kirchhoff solutions when used together with Eq. (2.46) or Fig. 2.3 provide benchmark Mindlin plate vibration results for analysts. The accurate results for simply supported circular plates, annular plates, sectorial plates and annular sectorial plates are also presented in Tables 2.4 to 2.7, respectively as they may be used to generate the corresponding Mindlin results quite accurately.
Sec. 2.2 Relations Between Kirchhoff and Mindlin Plates
20
Table 2.1 Frequencies o f triangular and rectangular Kirchhoff plates
with simply supported edges Frequency Parameters ~a 2 = ffg.a2~ p h / D
Plate Shapes
d/a
b/a
Mode Sequence Number
Triangle
1 1/4
~ 1 ~d a~x
1/2
2/5 1/2 2/3 1.0 2/~/3 2.0 2/5 1/2 2/3 1.0 2/'43 2.0
23.75 27.12 33.11 46.70 53.78 101.5 23.61 26.91 32.72 45.83 52.64 98.57
12 40.80 49.47 65.26 100.2 115.9 195.8 40.70 49.33 65.22 102.8 122.8 197.4
31415[ 60.54 75.18 88.68 117.2 134.7 275.0 60.55 76.29 87.38 111.0 122.8 256.2
70.33 78.27 106.1 171.8 198.1 315.6 69.78 76.30 106.0 177.3 210.5 335.4
83.39 107.4 141.2 197.0 229.2 427.7 83.42 108.0 142.5 199.5 228.1 394.8
Rectangle
0
,J v!
Source 6 101.8 117.4 156.4 220.4 252.0 464.2 101.5 116.4 154.8 203.4 228.1 492.5
Liew (1993a)
Leissa (1969)
where m and n are the number of half waves
Chap. 2 Mindlin Plate Theory and Ritz Method
21
Table 2.2 Frequencies of parallelogram Kirchhoffplates with simply supported edges Plate Shape
F r e q u e n c y Parameters ~ 2 "-- O)nb - 24 p h / D
a/b
fl
M o d e Sequence N u m b e r
Parallelogram 1.0
|..q
/_2
1.5
,,J vl
a
I 2
1
2.0
Source
3 1 4 1 5 ] 6
15 ~
20.87
48.20
56.12
79.05
104.0
108.9
Liew, Xiang,
30 ~
24.96
52.63
71.87
83.86
122.8
122.8
Kitipornchai,
45 ~
35.33
66.27
100.5
108.4
140.8
168.3
and Wang
60 ~
66.30
105.0
148.7
196.4
213.8
250.7
(1993)
15 ~
15.10
28.51
46.96
49.76
61.70
75.80
30 ~
18.17
32.49
53.48
58.02
76.05
78.61
45 ~
25.96
42.39
64.80
84.18
93.31
107.5
60 ~
48.98
70.51
96.99
127.3
162.3
171.1
15 ~
13.11
20.66
33.08
44.75
50.24
52.49
30 ~
15.90
23.95
36.82
52.64
56.63
63.26
45 ~
23.01
32.20
46.21
63.50
82.08
83.00
60 ~
44.00
56.03
72.79
92.80
117.4
151.7
Table 2.3 Frequencies of symmetrical trapezoidal Kirchhoffplates with simply supported edges Plate Shape
F r e q u e n c y Parameters ~ 2
i/
r~
I
1/5
3.336
4.595
6.860
10.19
10.23
11.53
Liew and
2/5
2.198
3.479
5.499
5.789
7.737
9.027
Lim
3/5
1.654
3.066
3.728
5.394
6.037
6.156
(1993)
4/5
1.356
2.833
2.879
4.560
5.086
5.192
1.5
t
a
J
2
1.0
C
F
--
c/b
M o d e Sequence N u m b e r
1
Symmetric Trapezoid
=