HANDBOOK OF DYNAMICAL SYSTEMS Volume 2
This Page Intentionally Left Blank
H A N D B O O K OF D Y N A M I C A L S Y S TEM S Volume 2 Edited by
B E R N O L D FIEDLER Freie Universitiit Berlin, Germany
2002 ELSEVIER Amsterdam
9L o n d o n
9N e w Y o r k 9 O x f o r d
9P a r i s
9S h a n n o n
9T o k y o
E L S E V I E R SCIENCE B.V. Sara Burgerhartstraat 25 P.O. Box 211, 1000 AE Amsterdam, The Netherlands 9 2002 Elsevier Science B.V. All rights reserved. This work is protected under copyright by Elsevier Science, and the following terms and conditions apply to its use: Photocopying: Single photocopies of single chapters may be made for personal use as allowed by national copyright laws. Permission of the Publisher and payment of a fee is required for all other photocopying, including multiple or systematic copying, copying for advertising or promotional purposes, resale, and all forms of document delivery. Special rates are available for educational institutions that wish to make photocopies for non-profit educational classroom use. Permissions may be sought directly from Elsevier Science Global Rights Department, PO Box 800, Oxford OX5 1DX, UK; phone: (+44) 1865 843830, fax: (+44) 1865 853333, e-mail:
[email protected]. You may also contact Global Rights directly through Elsevier's home page (http://www.elsevier.com), by selecting 'Obtaining Permissions'. In the USA, users may clear permissions and make payments through the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923, USA; phone: (+1) 978 7508400, fax: (+1) 978 7504744, and in the UK through the Copyright Licensing Agency Rapid Clearance Service (CLARCS), 90 Tottenham Court Road, London W1P 0LP, UK; phone: (+44) 207 631 5555; fax: (+44) 207 631 5500. Other countries may have a local reprographic rights agency for payments. Derivative Works: Tables of contents may be reproduced for internal circulation, but permission of Elsevier Science is required for external resale or distribution of such material. Permission of the Publisher is required for all other derivative works, including compilations and translations. Electronic Storage or Usage: Permission of the Publisher is required to store or use electronically any material contained in this work, including any chapter or part of a chapter. Except as outlined above, no part of this work may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without prior written permission of the Publisher. Address permissions requests to: Elsevier Science Global Rights Department, at the mail, fax and e-mail addresses noted above. Notice: No responsibility is assumed by the Publisher for any injury and/or damage to persons or property as a matter of products liability, negligence or otherwise, or from any use or operation of any methods, products, instructions or ideas contained in the material herein. Because of rapid advances in the medical sciences, in particular, independent verification of diagnoses and drug dosages should be made. ISBN: 0-444-50168-1 First edition 2002
Library of Congress Cataloging-in-Publication Data A catalog record from the library of Congress has been applied for.
| The paper used in this publication meets the requirements of ANSI/NISO Z39.48-1992 (Permanence of Paper). Printed in The Netherlands
Preface This Handbook is Volume 2 in a series collecting mathematical state-of-the-art surveys in the field of dynamical systems. Much of this field has developed from interactions with other areas of science, and this volume shows how concepts of dynamical systems help to clarify mathematical issues that arise in applications. Although modeling issues are addressed, the central theme is the mathematically rigorous investigation of the resulting differential equations and their dynamic behavior. The authors and editors have made an effort, however, to ensure readability on a non-technical level for mathematicians from other fields and for other scientists and engineers. The eighteen surveys collected here do not aspire to encyclopaedic completeness, but present selected paradigms. There is a web of relationships among the chapters, allowing them to be organized in different ways, each somewhat arbitrary. The chapters are grouped into those emphasizing finite-dimensional methods, numerics, topological methods, and
partial differential equations.
Two of the three articles in the section onfinite-dimensional methods deal with dynamics of networks of neurons. One of them focuses on a variety of techniques, geometrical and analytical, for investigating interactions of pairs of oscillators. A complementary review uses geometrical ideas to discuss further aspects of small network interactions, and some interesting consequences for particular neural applications, including sleep rhythms and visual scene segmentation. Many of the mathematical features carry over to more general coupled oscillator networks, ranging from electronics to solid state physics, while other ingredients are specific to the particular applied field, here neurophysiology. This interplay of general mathematical structure with specific applied context is an important underlying theme of the volume, and is demonstrated by the paradigms presented. Addressing fluid dynamics on geographic scales, the third survey illustrates an application of lobe dynamics of transverse planar heteroclinic tangles to global transport phenomena by ocean currents. Methods are geometrical and are based on the analysis of invariant manifolds of hyperbolic trajectories and invariant tori. Numerical simulation has become an omnipresent- and sometimes naively appliedtool in bridging the gap between universal mathematical theory and specific applied context. It is one of the goals of the section on numerics to indicate the level of sophistication necessary to properly deal with various aspects of dynamics, numerically. We start with a thorough survey of state-of-the-art continuation methods, which seek to determine the parameter dependence of particular types of solutions, such as critical points or periodic orbits. This includes computations of normal forms, of codimension two bifurcations, and of homoclinic bifurcations. Stable and unstable manifolds, which may intersect along homoclinic curves for flows, will typically split under time discretization and exhibit exponen-
vi
Preface
tially small separation. This effect and the associated invisible chaos mark a fundamental difference between continuous time autonomous flows and their time discretizations. Both upper and lower bounds for exponentially small splitting effects are provided. More generally, another survey aims at assessing the capability of theory, algorithms, and software to elucidate the structure of dynamical models in mathematics, science, and engineering. Specific dynamical objects include classical initial value problems, periodic solutions, invariant tori, stable and unstable manifolds, and their bifurcations. In the context of chaotic dynamical systems, hyperbolicity-based shadowing estimates provide a tool to diagnose whether it is possible to achieve numerical solutions that are close, over very large time spans, to actual solutions. Finally, set oriented numerical methods are presented which provide a robust tool for the approximation of low-dimensional invariant objects, such as attracting sets or invariant manifolds. These methods are also capable to derive statistical information about the dynamical behavior via the computation of approximate SRBmeasures and almost invariant sets. Topological methods are an important tool for the analysis of dynamical systems. Conley index, in this context, stands for Conley's successful idea of extending Morse theory to the requirements and challenges posed by dynamical systems which, a priori, do not possess a variational structure. Several examples in the first article apply Conley index to corroborate numerical input into computer assisted proofs. While the exposition here, not the method, limits itself to finite-dimensional dynamics, the survey on functional differential equations demonstrates applications of topological fixed point theory to infinite-dimensional dynamics. Partial differential equations are a fascinating infinite-dimensional source o f - and challenge f o r - dynamics. They are represented by eight articles, mostly parabolic, constituting almost half of the entire volume. While three surveys are related to fluid flows, we first comment on the five surveys which address general PDE topics. The intimate relations to finite-dimensional dynamics, in particular when studying global attractors and large-time behavior, are investigated from different perspectives in two surveys. In the non-parabolic case, even mere existence of a global attractor is not always obvious. In addition to dimension estimates and inertial manifold reductions, these articles extract geometrical information about the associated global attractors from structural PDE properties like Lyapunov functions and comparison principles. Such structures can be found in a variety of equations, including reaction diffusion equations, wave equations with damping, Navier-Stokes, Cahn-Hilliard, Kuramoto-Sivashinsky equations and certain integro-differential equations. Partial differential equations involve space coordinates as well as time coordinates. This allows for richer behavior, including spatial and spatio-temporal patterns. For example, travelling waves are solutions of associated ordinary differential equations. Depending on the type of wave, the desired solutions take a particular geometric form such as homoclinic orbits (for pulses), heteroclinic orbits (for fronts), or periodic orbits, as well as more complicated objects corresponding to multiple pulses and spirals. Their bifurcations and their PDE stability analysis pose formidable challenges addressed here. These results are complemented by a survey of some first steps towards understanding the spatio-temporal complexity of higher-dimensional stable and metastable patterns in nonlinear evolution equations of gradient type. The singularities generated by finite time blow-up of solutions
Preface
vii
are yet another PDE phenomenon which illustrates the close interaction of temporal dynamics with spatial profiles. Some of these singularities can be investigated using related equations that come from changes of variables motivated by self-similar blow-up solutions. The article on blow-up emphasizes the unifying role of abstract center manifolds in this spatio-temporal analysis. Two articles in the section on partial differential equations are closely related to questions of fluid flows. We begin with a large survey on the state of the art for existence, uniqueness, and model derivation of the central Navier-Stokes equation itself. Starting from the molecular level with Hamiltonian systems, the survey proceeds to Boltzmann equations, where the original time reversibility is lost, and arrives at the Navier-Stokes equations, which themselves lead to macroscopic models for turbulent flows. This spans a large hierarchy of dynamical systems, and the various limiting processes are made precise. Ginzburg-Landau equations, on the other hand, are almost universally relevant model equations and at the same time closely related to specific fluid flow phenomena. They appear as reduced, albeit infinite-dimensional, modulation equations. In particular they describe bifurcations in unbounded domains and govern the associated dynamics of spatiotemporal patterns. Full mathematical justification of the reduction process from the underlying PDE to the Ginzburg-Landau approximation is addressed. Like the Ginzburg-Landau approximation, the nonlinear Schr6dinger equation can be viewed as an envelope equation for certain idealized fluid flows, but also possesses major applications in nonlinear optics and in plasma physics. It is surveyed here to illustrate sample behavior and phenomena for a general class of PDEs: one-dimensional, nonlinear, dispersive wave equations. These provide examples of infinite dimensional dynamical systems which exhibit diverse and fascinating phenomena, including solitary pulse waves and wave trains, the generation and propagation of oscillations, the formation of singularities, the persistence of homoclinic orbits, the existence of temporally chaotic waves in deterministic systems, dispersive wave turbulence, and the propagation of spatio-temporal chaos. Classes of nonlinear Schr6dinger equations thus provide prototypical PDEs which illustrate the use of geometrical, analytical, and computational methods to capture and to describe the rich behavior of nonlinear dispersive waves. While the survey articles can be read independently, they deeply share recurrent themes from dynamical systems. Attractors, bifurcations, center manifolds, dimension reduction, ergodicity, homoclinicity, hyperbolicity, invariant and inertial manifolds, normal forms, recurrence, shift dynamics, stability, to name just a few, are ubiquitous dynamical concepts throughout the articles. It is this conceptual unity, and its ability to capture and mirror an ever-changing world, which is the innermost source of strength of the dynamical systems approach. Many friends and colleagues have helped bringing this volume to life. I am indebted to Floris Takens for the original idea of the Handbook series, and, with Henk Broer, Boris Hasselblatt, and Anatol Katok, for sharing the dynamics of their volumes with me, to Stefan Liebscher for his untiring care for the web services, to Regina L6hr for expertly keeping track ever so patiently of ever so many versions and revisions, and to Arjen Sevenster at Elsevier for efficient collaboration. Nancy Kopell and G6rard Iooss have helped significantly
viii
Preface
with editing this volume and have very generously shared their stimulating criticism with me. Most of all, of course, I am indebted to all authors for their contributions. Berlin, August 2001
Bernold Fiedler
List of Contributors Auerbach, D., University of Maryland, College Park, MD (Ch. 7) Bardos, C., University Denis Diderot and University Pierre et Marie Curie, Paris (Ch. 11) Beyn, W.-J., Bielefeld University, Bielefeld (Ch. 4) Cai, D., New York University, New York, NY (Ch. 12) Champneys, A., University of Bristol, Bristol (Ch. 4) Dellnitz, M., University of Paderborn, Paderborn (Ch. 5) Doedel, E., Concordia University, Montreal (Ch. 4) Ermentrout, G.B., University of Pittsburgh, Pittsburgh, PA (Ch. 1) Fife, EC., University of Utah, Salt Lake City, UT (Ch. 13) Fila, M., Comenius University, Bratislava (Ch. 14) Gelfreich, V., The Steklov Mathematical Institute at St. Petersburg, Russia and Institut fiir Mathematik I, FU, Berlin (Ch. 6) Grebogi, C., Universidade de $6o Paulo, S6o Paulo (Ch. 7) Govaerts, W., University of Gent, Gent (Ch. 4) Guckenheimer, J., Cornell University, Ithaca, NY (Ch. 8) Jones, C., Brown University, Providence, RI (Ch. 2) Junge, O., University ofPaderborn, Paderborn (Ch. 5) Kopell, N., Boston University, Boston, MA (Ch. 1) Kuznetsov, Y.A., Utrecht University, Utrecht (Ch. 4) Matano, H., University of Tokyo, Tokyo (Ch. 14) McLaughlin, D.W., New York University, New York, NY (Ch. 12) McLaughlin, K.T.R., University of Arizona, Tucson, AZ (Ch. 12) Mielke, A., Universitiit Stuttgart, Stuttgart (Ch. 15) Mischaikow, K., Georgia Institute of Technology, Atlanta, GA (Ch. 9) Mrozek, M., Uniwersytet Jagiellohski, Krak6w (Ch. 9) Nicolaenko, B., Arizona State University, Tempe, AZ (Ch. 11) Nussbaum, R.D., Rutgers University, Piscataway, NJ (Ch. 10) Polfi6ik, E, Comenius University, Bratislava (Ch. 16) Poon, L., University of Maryland, College Park, MD (Ch. 7) Raugel, G., CNRS et Universit6 de Paris-Sud, Orsay (Ch. 17) Rubin, J.E., University of Pittsburgh, Pittsburgh, PA (Ch. 3) Sandstede, B., Ohio State University, Columbus, OH (Chs. 4, 18) Sauer, T., George Mason University, Fairfax, VA (Ch. 7) Terman, D., The Ohio State University, Columbus, OH (Ch. 3) Yorke, J.A., University of Maryland, College Park, MD (Ch. 7) Winkler, S., Brown University, Providence, RI (Ch. 2) ix
This Page Intentionally Left Blank
Contents P refa c e List of Contributors
V
ix
A. Finite-Dimensional Methods 1. Mechanisms of phase-locking and frequency control in pairs of coupled neural oscillators N. Kopell and G.B. Ermentrout
2. Invariant manifolds and Lagrangian dynamics in the ocean and atmosphere
55
C. Jones and S. Winkler
3. Geometric singular perturbation analysis of neuronal dynamics
93
J.E. Rubin and D. Terman
B. Numerics 4. Numerical continuation, and computation of normal forms
149
W.-J. Beyn, A. Champneys, E. Doedel, W. Govaerts, YA. Kuznetsov and B. Sandstede
5. Set oriented numerical methods for dynamical systems
221
M. Dellnitz and O. Junge
6. Numerics and exponential smallness
265
V. Gelfreich
7. Shadowability of chaotic dynamical systems
313
C. Grebogi, L. Poon, T. Sauer, J.A. Yorke and D. Auerbach
8. Numerical analysis of dynamical systems
345
J. Guckenheimer
C. T o p o l o g i c a l M e t h o d s 9. Conley index
393
K. Mischaikow and M. Mrozek
10. Functional differential equations
461
R.D. Nussbaum
D. Partial Differential Equations 11. Navier-Stokes equations and dynamical systems C. Bardos and B. Nicolaenko
503
xii
Contents
12. The nonlinear Schr6dinger equation as both a PDE and a dynamical system D. Cai, D.W. McLaughlin and K.T.R. McLaughlin 13. Pattern formation in gradient systems P.C. Fife 14. Blow-up in nonlinear heat equations from the dynamical systems point of view M. Fila and H. Matano 15. The Ginzburg-Landau equation in its role as a modulation equation A. Mielke 16. Parabolic equations: asymptotic behavior and dynamics on invariant manifolds P. Pold(ik 17. Global attractors in partial differential equations G. Raugel 18. Stability of travelling waves B. Sandstede
599 677 723 759 835 885 983
Author Index
1057
Subject Index
1077
A. Finite-Dimensional Methods
This Page Intentionally Left Blank
CHAPTER
1
Mechanisms of Phase-Locking and Frequency Control in Pairs of Coupled Neural Oscillators* N. Kopell Department of Mathematics and Center for BioDynamics, Boston University, Boston, MA 02215, USA E-mail: nk@bn, edu
G.B. Ermentrout Department of Mathematics, University of Pittsburgh, Pittsburgh, PA 15260, USA
Contents 1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2. Phase oscillators and averaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1. Derivation of phase-difference equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2. Computing frequency, phase lags and stability for pairs of coupled oscillators . . . . . . . . . . . . 2.3. Delays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4. Frequency effects and the rise/fall time of synapses . . . . . . . . . . . . . . . . . . . . . . . . . . 2.5. Interaction near a Hopf bifurcation or a homoclinic orbit . . . . . . . . . . . . . . . . . . . . . . . 3. Interactions of spiking cells . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1. Spike response method and periodic solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2. Networks with inhibitory connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3. Spike response method and electrical coupling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4. Oscillators with multiple spiking cells . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1. Long-range synchronization of the g a m m a rhythm . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2. G a m m a to beta transition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3. Long-distance synchronization of the beta rhythm . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.4. Changing ionic currents changes synchronization properties . . . . . . . . . . . . . . . . . . . . . . 4.5. Synchronization of excitatory cells . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5. Interactions ofbursting neurons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1. Fast threshold modulation (FTM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2. Electrical coupling of cells or compartments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3. Electric coupling of heterogeneous cells . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 7 7 10 12 15 16 20 20 23 27 31 31 34 35 38 40 41 42 49 51 51
*Work partially supported by NIH grant RO1-MH47150 to NK and GBE, NSF grant 9706694 to NK and a NSF grant to GBE. We thank J. Ritt and S. Epstein for careful readings and helpful comments. H A N D B O O K OF D Y N A M I C A L SYSTEMS, VOL. 2 Edited by B. Fiedler 9 2002 Elsevier Science B.V. All rights reserved
This Page Intentionally Left Blank
Mechanisms of phase-locking andfrequency control
5
1. Introduction Oscillations occur in many networks of neurons, and are associated with motor behavior, sensory processing, learning, arousal, attention and pathology (Parkinson's tremor, epilepsy). Such oscillations can be generated in many ways. This chapter discusses some mathematical issues associated with creation of coherent rhythmic activity in networks of neurons. We focus on pairs of cells, since many of the issues for larger networks are most clearly displayed in that context. As we will show, there are many mechanisms for interactions among the network components, and these can have different mathematical properties. A description of behavior of larger networks using some of the mechanisms described in this chapter can be found in the related chapter by Rubin and Terman. For reviews of papers about oscillatory behavior in specific networks in the nervous system, see Gray [21], Marder and Calabrese [41], Singer [55], and Traub et al. [62,64]. The chapter is organized by mathematical structure, focusing on some of the techniques that have been found to be useful to understand the behavior of networks of neurons. The behavioral repertoire of two-component networks includes synchronized oscillations, antiphase oscillations, phase-locked oscillations with phase difference other than zero or 7r, as well as non-phase-locked solutions and steady states. We concentrate on the oscillatory phase-locked solutions, including some that occur when neither of the cells is itself an oscillator. One aim of the chapter is to provide methods for understanding what aspects of the cells and their interaction determine which of these behaviors are found, especially in complicated contexts. We pay particular attention to how changes in various time scales associated with the cells and their connections affect the behavior of the network. Though the focus is on pairs of components, we discuss implications for larger networks throughout the chapter. The component cells we have in mind are modeled by voltage-gated conductance equations, which have the form 61)
Cd-t -- -- ~
lion + IA
(1.1)
(Rinzel and Ermentrout [49]). Here lion represents an ionic current; it is the product of a driving force of the form v - VR and a conductance (inverse of resistance). Here VR denotes the "reversal potential" of the current, which depends on the ion carried by the current. The value of VR determines whether the current is depolarizing (inward, moving the voltage toward the threshold and making it easier for the cell to fire an action potential) or hyperpolarizing (outward, moving the voltage away from threshold for firing an action potential). The conductance depends in a dynamic way on the voltage, adding further differential equations; there are voltage-dependent "gates" that open or close with kinetics that also depend on the particular current. For example, for a sodium current, the conductance is usually written in the form ~,m3h, where ~ is the maximal conductance, and m and h satisfy the equations dx
at
=
-
6
N. Kopell and G.B. Ermentrout
where x = m or h. m ~ ( v ) is a monotone-increasing sigmoidal function (saturating for large and small v), while h ~ (v) is a monotone-decreasing sigmoidal function). The kinetic functions r (v) are different for h and m, and also differ between currents in the same cell; in general, the gating equations have slower kinetics than the voltage equation. Thus, the full equations are highly nonlinear, and have a range of time scales. The term IA is the applied current, sometimes referred to as the drive to the cell. It can model current injection by an experimenter, or a modulatable (time-independent) quantity representing processes slow enough to be treated as constant, and affecting the overall excitability of the cell. None of the techniques we present deals directly with the full Hodgkin-Huxley equations, though the last deals with some equations of this type. Rather, in each of the succeeding sections, we first present reduction techniques that allow us to deal with a class of simpler equations. We then present methods of analysis for that class, and some contexts in which the analysis gives answers about phase and frequency of the networks. In some cases, such as electrical coupling between cells or parts of cells, we visit the subject in several different sections, producing complementary insights with complementary methods. Section 2 concerns weakly coupled oscillators. If the oscillators have robust limit cycles, the full equations reduce (to lowest order) to ones whose interactions are through the differences of their phases. Though much has been written about such equations, e.g., (Hoppensteadt and Izhikevich [24], Kopell [31], Kopell and Ermentrout [34]), we focus here on some novel uses of these equations, including analysis of interactions with conduction delays. Another regime we discuss concerns oscillators near a Hopf bifurcation. In this case, the equations can be analyzed using normal forms that take into account amplitudes as well as phases. Using analysis and geometry, we apply these ideas to showing how interactions via diffusion can lead to non-synchrony between oscillators. Section 3 describes the interaction of spiking neurons, for which other approximations can be made that enable analysis. In this section, we treat the cells as "integrate-and-fire" (I&F) neurons. We describe the "spike-response method", a formalism that describes the time-dependent response of the voltage of the cell to the history of the pulsatile inputs that it has received. Though this method can in principle be used quite generally, it is most useful when the dynamics are fairly simple in the interval between spikes (as in I&F neurons). We use this method to see how the dynamics of the synapses affects the network behavior, including synchronization and emergent frequency; we focus mainly on inhibitory networks. We also apply the method to electrically coupled neurons to show how the shapes of the spikes can affect whether or not the electrical (diffusive) coupling is synchronizing, and how, in turn, that depends on the frequency of the network. The spike-response method can sometimes be applied to networks of excitatory and inhibitory neurons. But when there are small numbers of cells, different kinds of cells in the network, and complicated dynamical patterns, another kind of reduction, considered in Section 4, can be more effective for analysis. This reduction looks at Poincar6 maps in a neighborhood of a particular periodic solution. Though the full equations (and the Poincar6 map) can be high-dimensional, the spread of time scales in the system can allow it to be well approximated by low-dimensional maps. We use these ideas to discuss precise synchronization in the presence of conduction delays.
Mechanisms of phase-locking and frequency control
7
Section 5 deals with bursting oscillators. A bursting neuron is one that emits a fast sequence of spikes, interspersed with a well-defined inter-burst interval. Such a neuron has at least three time scales even without coupling: the time scale of the voltage change within a spike, the scale of the recovery variable within a spike, and some slower process that starts and/or ends the bursts. There has been much work on mechanisms that produce such bursting. (See Izhikevich [26] for many references, and the chapter by Rubin and Terman [52] of this volume.) In this section, we shall simplify the bursting neurons by working with the envelope of the spikes, ignoring the fast currents that produce the individual spikes. The work in this section is complementary to related work in Rubin and Terman [52]; we focus on network behavior when there are fast excitatory or inhibitory synapses, with no extra time scales associated with the coupling. We introduce geometrical ideas associated with "fast threshold modulation" and time metrics for computing synchronizing effects, and show how synaptic thresholds can affect the frequency of the coupled system. We also discuss how strong electrical coupling of "compartments" of a single cell can have some unexpected mathematical properties.
2. Phase oscillators and averaging It is not possible to analyze the general behavior of a pair of coupled nonlinear oscillators. However, if the coupling is sufficiently weak, then it is possible to reduce the behavior of a general coupled system to something much simpler. In most of this section, we work with an identical pair of oscillators that have stable limit cycles. In that case, the full system can be reduced to a single equation for the difference in the phases of the oscillators. The special structure of neural equations and the kinds of coupling between them translates into constraints on the reduced equations that can be used to understand the circumstances under which the oscillators synchronize or stabilize at other phase differences. In this section, we derive the equation, and show how to make use of the special structure. We then apply the ideas to oscillators with delays in the signals. If the limit cycle of the oscillators is only weakly stable, i.e., comparable in strength to the coupling, then the reduced equations must take into account not only the phases, but how the deviation of the trajectories from the limit cycle affects the phases. Such a situation occurs near a Hopf bifurcation. In that case, there is another reduction procedure, using a normal form, that encodes the behavior of the system. We discuss that derivation and apply it to show why coupling via discrete diffusion need not lead to stable synchrony. The analytical computations have a geometric counterpart, as we show.
2.1. Derivation o f phase-difference equations Consider a system of two similar coupled nonlinear oscillators: dXi dt
= Fi(Xi) + eGi(Xi,
Xj),
X i ~ R'", i -- 1,2, i :/: j,
(2.1)
8
N. Kopell and G.B. Ermentrout
with 0 < e tl, but sufficiently close that the firing of cell 1 does not prevent the firing of cell 2 in that cycle. We start with the analogue of (3.3), namely v i ( t ) -- Ii + ~ ( t - ti) - ~(t - t j ) ,
j =7t=i.
(This ignores the effect of cell 1 on cell 2 in the current cycle, which is permissible if the cells are close together, since ~(0) -- 0.) Cell i fires again when vi (t) -- 1, at t = i/. We wish to compute t2 - t i = A and compare this to t2 - t l -- A to check for stability of the synchronous solution. For simplicity, we again assume that the driving currents Ii a r e equal. The definitions of ti imply that _
,(i.
-,.)
-
1 -
To linearize the equation around the values associated with one cycle later, we let Tp be the period of the coupled synchronous solution, and define pi via ti -- ti -- Tp + Pi. Using the relations il - t2 - Tp + Pl - A and {2 - tl -- Tp + P2 + A, we get r l ' ( T p ) ( p 2 - P l ) -- s'(Tp) [(p2 - Pl) + 2A].
Using P2 - Pl = A -- A, we have A--
~ ' ( T p ) + r/'(Tp)
e'(Tp) - r l ' ( T p )
A.
Note that r/' (Tp) > 0 and we are assuming that Tp is such that e' (Tp) < 0, i.e., the period is high enough that the synapse is decaying when the next spike appears. (See Gerstner et al. [20].) Hence the coefficient of A is less than 1 in absolute value. Thus, if the rise of the synapse is not infinitely fast, we recover the result from the above theory that the condition e' (Tp) < 0 is a necessary condition for inhibition to be synchronizing. But the calculation also shows that the condition e'(Te) < 0 is sufficient for synchrony, and that the size of r?' (Tp) helps determine the rate of synchronization near the synchronous state; if r/' (Tp) is small, as it would be if the period is too long relative to the recovery period of the neuron, the rate of synchronization would be low. Note that the r/(t) in Figure 3.1 decays quickly; however, if the spike of the cell triggers self-inhibition (via an "autapse", or self-synapse), the resulting kernel O(t) decays over a much longer time, and the two cells synchronize much more quickly.
N. Kopell and G.B. Ermentrout
26
A related treatment is done in Chow [8], assuming that the neuron that fires second is influenced both by the last recent firing of the leading cell and the spike on the previous cycle. 3.2.2. F r e q u e n c y regulation in inhibitory networks. In the full Hodgkin-Huxley equations, there can be many different time scales associated with the synapses and the intrinsic dynamics. In order to understand how some of these may affect the p e r i o d of the network solution, we use a slightly more complicated version of the integrate-and-fire neurons, one that is not pre-scaled. It is dV C~ = I - gm(W - Wr) -- g S ( t ) , dt
(3.7)
where gm is an effective membrane recovery conductance and V,. is an effective membrane reversal potential. V (t) is reset to V0 whenever it reaches the threshold potential VT. Note that we are assuming identical cells (11 = 12) and a synchronous solution, so we may drop subscripts. This section is taken mainly from Chow et al. [ 10]. In these equations, there are three natural time scales. The first is the effective membrane time constant g m / C = rm associated with the passive return to the rest potential after a spike. The second is the decay time r of the synapse. (Though the rise time is very important for synchronization, it does not play an important role in frequency determination.) The third is the period T when two identical cells are coupled. This time scale is an emergent property of the system, and can be altered by changing the driving current I. Note that, in the absence of coupling, the frequency of an individual neuron can be very high hundreds of Hz - and the reduced spiking models in White et al. [71 ] and Ermentrout and Kopell [ 17] also behave this way. When coupled, however, the frequency is affected by time scales in the coupling. The aim of the analysis is to understand the circumstances under which different time scales in the equations dominate the determination of the network frequency. As in Section 3.2, we consider different parameter regimes, which we define asymptotically by relationships between T, r and rm. (As usual with asymptotic analysis, the conclusions hold in some regime larger than the strict definition of the regimes.) The tonic and phasic regimes have been introduced less precisely in the previous section. -
Tonic regime: Phasic regime: Fast regime:
T tl. When t2 fires, cell 1 is advanced by an amount P (t2 - t l ) so that tl -- tl + T - P(t2 - tl), where T is the natural period of both cells. (Note that one could have different periods but this complicates the algebra considerably.) By a similar argument, it is clear that t-2 --t2 + T - P(il - t2) m
_
_
is the time that cell 2 fires again. As usual let A -- t2 - tl and A -- t2 -- tl. We then see that A-- A - P(T - P(A) - A) + P(A) = F(A)
and we have again obtained a 1-dimensional map. We now make use of the condition P (0) -- P (T) -- 0 to note that A -- 0 is a fixed point of the map F. PRCs derived from real neurons as well as those derived numerically from conductance-based models satisfy this condition, which implies that there is no effect on spike timing if the input comes at the precise time the cell is spiking. (This is not true for the well-known integrate-and-fire model. Thus, the latter requires artificial "absorption" conditions (Mirollo and Strogatz [45]) that are not necessary for more biological PRCs.) Differentiating F and setting A = 0, we find that F (0) -- (1 +
P' (0)) 2
so that a necessary and sufficient condition for stability of synchrony is that - 2 < P' (0) < 0. Crook et al. [13] showed numerically that the presence of adaptation due to a lowthreshold, slow-potassium current causes the PRC to have a negative region after spiking,
Mechanisms of phase-locking and frequency control
41
with P' (0) < 0. As long as P' is not too negative (for example, if the interaction is not too strong), then the map calculation shows how this alteration of the PRC allows synchrony to be stabilized. In contrast, without adaptation, neurons tend to have strictly positive PRCs when coupled with excitation. The effects of the change on the PRC, and the effect of the latter on stability of synchrony, mirrors changes in the adjoint V*(t); indeed V*(t) is a kind of "infinitesimal PRC" (Hansel et al. [23]). (See Figure 2.1 and Section 2.2.) More recently, Ermentrout et al. [ 18] used such methods to investigate the effects of different kinds of adaptation currents on synchrony between excitatory neurons. They showed that low threshold adaptation currents and high threshold ones can have different mechanisms for creation of synchrony. The effects work in sample model neurons capturing behavior near creation of limit cycles via saddle-node bifurcations on an invariant circle [ 15, 251. The Ermentrout et al. [ 18] treatment is based on weak interactions, using a convolution with an infinitesimal PRC to create the PRC. For larger interactions, predictions from the infinitesimal PRC can be misleading. This was shown by Ackers et al. [ 1], who constructed the PRC numerically from the Hodgkin-Huxley equations for pairs of cells in the medial entorhinal cortex, a structure that gates the inputs and outputs to and from the hippocampus. The more direct construction reveals global properties of synchronization not apparent in the infinitesimal PRC: for large values of the conductance of the low current, which is associated with prominent subthreshold oscillations for the uncoupled cell, the stable antiphase solution predicted by the infinitesimal PRC approach disappears, and the synchronous solution becomes globally stable instead of bistable with antiphase. These global changes are seen to be associated with the Hopf bifurcation that produces subthreshold oscillations in the uncoupled cells (not found in the equations in (Ermentrout et al. [ 18])). Thus, subthreshold oscillations are seen to be relevant to the domain of stability of the synchronous solution. We note that the spike-timing maps associated with the PRCs can be globally defined. This is not true of the maps from the "hold-and-fire" systems, which cease to be valid sufficiently far from the synchronous solution. The reason is that a different set of spike times must be considered far from synchrony: in the maps discussed in Sections 4.1 and 4.3, the independent variable is t2 - tl, where the ti are nearby spike times of the two cells, not dependent on which of the cells is first, provided that the "hold" due to inhibition is larger than It2 - tl [. For larger initial differences in spike time, the input most relevant to the receiving oscillator changes, changing the map. The PRCs discussed above keep the order of the relevant spikes the same from cycle to cycle, and the map does not become undefined for large values of the initial difference in spike times.
5. Interactions of bursting neurons
As described in Rubin and Terman [52] and Wang and Rinzel [70], neurons can have complicated firing patterns known as bursts, consisting of a rapid sequence of spikes followed by a quiescent period. Some biophysical models for bursting are given in those references. In studying the interactions of bursting cells, we consider the envelope of the spikes (as do Rubin and Terman); a much-used simple example of such equations are the so-called
42
N. Kopell and G.B. Ermentrout
Morris-Lecar equations (Morris and Lecar [46]), originally designed to describe a calcium spike in muscle (not nerve) tissue. These equations were introduced as (2.8) in an earlier section. In these equations, the activation w of the potassium current is slow (i.e., 1/ r 7~> 7~ > Bo BI B2 > -".
Under forward iteration of the map, fluid in lobes A l and C1 leaves the recirculation region and enters the region of retrograde motion while fluid contained in lobes B1 and D1 enters the recirculation region from the retrograde region. That is, the exchange of fluid across the exterior boundary takes place when fluid passes from lobes A l . . . . . D1 to lobes A2 . . . . . D2. As mentioned above, the designation of turnstile lobes depends on how the boundary between regions is defined (determined by the choice of qe). However, the identification of which lobe sets are entering and leaving a particular region is not affected by the choice of qe, and therefore the resulting transport estimates (discussed below) are not affected by this choice. The transverse intersection of W u (pl) and W s (p2) indicates that there is fluid exchange across the interior boundary, defined as U[pl, qi] t,3 S[p2, qi] (Figure 6(b)). The turnstile lobes along the interior boundary are labeled E, F, G and H. Lobes Fl and Hi enter the recirculation region from the edge of the jet core while lobes El and G l are mapped from the recirculation region to a region near the edge of the jet core (lobe G2 is not shown completely in Figure 6(b)). Exchange takes place across the interior boundary when fluid is mapped from lobes E1 . . . . . HI to lobes E2 . . . . . H2. Lobe areas are calculated using Green's theorem and can be used to estimate the transport associated with the Lagrangian motion described above. The dimensional transport is simply, A
A
T -- D* A/T1,
Invariant manifolds and Lagrangian dynamics in the ocean and atmosphere
69
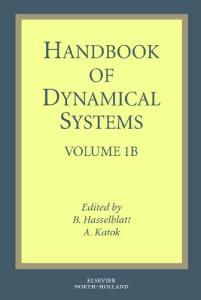
Table 1 Summary of the transport estimates. The exterior boundary separates the recirculation region from the retrograde region. The interior boundary separates the recirculation region and the edge of the jet core. The cumulative nondimensional lobe areas are listed along with the associated dimensional transport in Sverdrups (10 6 m 3 s - l ) . The dimensional scales are described in the text. Fluid leaving vortex
Fluid entering vortex
(Re, r, no)
Bndry
Lobes
Area
Transport
Lobes
Area
Transport
(103,0.103,3)
exter inter
B,D F, H
3.031 0.724
4.69 Sv 1.12 Sv
A, C E, G
3.031 0.724
4.69 Sv 1.12 Sv
WS(pl)
_
_
w~(p~)
3
(~)
Y 2
_
A1 6
i0
8
.
12 .
.
14
q~~.
.
Pl ~ ~ ~ / / o
16
~_~
_
18
20
x
E1
5
"",,
P2
4
(b)
\\ -
-|
\
\
/ /
\~, |
1/ t
i
,
'
Fig. 6. Computed stable (dashed line) and unstable (solid line) manifolds for (Re, fl, n0) = (103, 0.103, 3) and the resulting lobes. The heavier lines define our choice of boundary as described in the text. (a) Along the exterior boundary, U[p2,qe ] U S[pl,qe], fluid in lobes A 1 and C1 moves from the recirculation region to the outer retrograde region while lobes B 1 and D 1 are mapped from the retrograde region to the recirculation region. (b) Along the interior boundary, U[p 1, qi] U S[p2, qi], lobes E 1 and G 1 transport fluid from the recirculation region to the edge of the jet core. Lobes F1 and H1 are mapped from the edge of the jet core to the recirculation region.
70
C. Jones and S. Winkler
where A" is the dimensional lobe area, ~ is the dimensional period of the flow, and D* is a characteristic length scale representing the depth over which the transport takes place. Table 1 shows transport estimates for D* -- 500 m as applicable to the Gulf Stream, along with the horizontal length scale L* - 105 m and velocity scale U* = 1.75 m s - l ( u * -0.87 m s- 1) for nondimensional/3 - 0.103. The resulting transport fluxes are significant, although those associated with the exterior boundary exceed those of the interior by a factor of at least four. In comparison with the flux of water across the Gulf Stream associated with ring detachment, about 3 Sverdrup, the fluxes along the exterior boundary are the same order of magnitude. They must thus be viewed as substantial and cannot be ignored in any overall mass flux budget, see [41] for further discussion.
5. Finite-time transport While the above calculations make a striking case for the significance of Lagrangian transport in the overall budget of ocean transport, the artificial reconstruction of a flow field defined for all time by enforcing periodicity is unrealistic. As mentioned a number of times above, many structures in an ocean flow will persist for only finite spans of time. Moreover, the entire character of a flow may change and thus the templates against which the transport is being calculated may cease to be valid. Despite the temporary nature of coherent structures, they are identifiable for long time spans and they play key organizing roles in the overall flow during their lifetime. For instance, the Gulf Stream rings carry water that is quite saline to the coastal region of the East Coast. The transport of water in and out of these structures is a significant feature in the overall fluid budget and therefore a theory is needed that allows us to quantify that transport in an effective manner. Flows spanning a finite time of observation thus form the appropriate context for which a realistic theory of transport needs to be developed. To dynamicists, the limitation to finite time is a challenge, as the fundamental constructions of dynamical systems are based upon asymptotic information. Stable and unstable manifolds are defined by the behavior of solutions as t - . -+-c~, respectively. A coherent feature such as an eddy could naturally be thought of as defined by a surrounding stable manifold, but if the feature lives in a highly time-dependent flow and persists for only finite time, a stable manifold cannot be defined. A theory of "finite-time" stable and unstable manifolds is clearly needed. In the following, we outline an operational procedure for generating "effective" invariant manifolds. These play the same role in organizing the flow and orchestrating the transport as do stable and unstable manifolds of fixed points in steady or periodic flows. The underlying idea is to proceed in exactly the same way as when computing (numerically) an invariant manifold in a periodic system, or one for which infinite time data is available. The basic numerical strategy is articulated well by Nusse and Yorke [34] who adopt the term "straddling" for this procedure. The operation is most easily visualized for a saddle fixed point in the plane: a segment of initial data is picked that is transverse to the stable direction; under the evolution of the flow, or the map, it will be stretched out in the unstable directions while part of the segment close to the fixed point will be anchored by the exponential contraction along stable direction. The idea in the following is to implement this
Invariant manifolds and Lagrangian dynamics in the ocean and atmosphere
71
procedure in other cases where some semblance of a saddle fixed point exists dynamically, but which is perhaps time dependent in a sufficiently complex manner so as to preclude the existence of an actual fixed point. For instance, the region may have the hyperbolic character of that near a saddle fixed point for only a finite time.
5.1. Effective invariant manifolds A theory was developed in the paper by Miller et al. [32] that gives a practical approach to generating these "effective invariant manifolds". The term "effective" has both its meanings here: they are effective in the sense that they are manifestations in these complex flows of material surfaces that play the role of stable and unstable manifolds in transport studies in simpler systems, and also they are effective in that they do effect the transport under consideration. The idea is as follows. The data available and useful for the meandering jet spans over a time interval of approximately 60 time units. Before that time, the jet is forming out of the (linear) initial data and, after that, the jet is decaying due to the drain of viscosity (note that no forcing is included in that model which might have preserved the jet by balancing viscosity). However, during that time span, the characteristic structures of a meandering jet are evident. These include the central jet itself and its attendant recirculation zones lying in the troughs of the meanders and under the hills. In the analysis described in the previous section, the enforcement of periodicity allowed us to play freely with time integrations without worry as to whether we would run out of data by exiting the time window of available data. The consequence was that fixed points, or more generally trajectories, could be isolated, their stable and unstable manifolds generated, and their role in governing the dynamics determined. The natural question arises as to whether that freedom is really needed for the computations of the stable and unstable manifolds. In other words, even when the periodic approximation is being made, only a finite time span of data is used in generating the invariant manifolds. Of course, this is inevitable as in any numerical computation only a finite span of the data set is used. To answer this question, it is useful to think how an invariant manifold calculation is carried out in practice. If a saddle type fixed point is known, then an initialization of wellchosen data points near that fixed point will be stretched out along the unstable manifold by the flow and trace out the unstable manifold. The initial points can be "well-chosen" in a number of ways. They might, for instance, be chosen as a small circle surrounding the fixed point. The flow will squash the circle onto the unstable directions, the force of the unstable part will then elongate the evolved circle, and a caricature of the unstable manifold will emerge. A more refined technique can be implemented if some information is readily available about the unstable directions. In this case, an initialization of a curve of points could be chosen along an unstable direction and iterated under the flow. Various refinements of this procedure have been used, but ultimately they all largely depend on the stretching of the flow in the unstable directions. Of course, it is important to pack the initial data set densely enough so as to avoid developing gaps in the sketched manifold. The greatest danger lies near the fixed point itself as the flow carries all trajectories away from this unstable point. This potential problem can be resolved by re-seeding the initial data set if neighboring points separate more than some predetermined tolerance.
72
C. J o n e s a n d S. W i n k l e r
The main interest then is whether the finite-time data sets available from the numerical runs of the meandering jet suffice for carrying out this procedure. The physics gives us a hint. A given coherent structure, such as an eddy, appears to generate a hyperbolic trajectory as a key part of what defines it. Indeed, the boundary of such a structure is reasonably viewed in a Lagrangian manner as the stable manifold of a hyperbolic point. We have come to expect these regions of strong stretching and compressing as standard accompaniments of a coherent structure. It is not unreasonable to believe that if a structure is well-defined for a sufficient interval of time, then a data set will be available to generate the invariant manifolds. At the beginning, it was an article of faith that we would be able to obtain invariant manifolds in this way. However, it has been borne out in all the examples, and it is now quite sensible to conjecture that the coherence of a structure and an attendant region of sufficient hyperbolicity to generate the invariant manifolds are really the same thing.
5.2.
Transport
calculations
In Miller et al. [32], finite time invariant manifolds were computed for the meandering jet flow of Section 4 using these ideas. The parameters used in this study were ( R e , fl, n o ) (104, 0.207, 4), and computations were carried out for the time interval 0
0.2
" ~
0.7
o.~5
Y2
0.1 Yl
0
0.5
Fig. 6. A projection of a parabolic bursting solution. The slow dynamics sweep the trajectory from the silent phase across the curve of homoclinic bifurcations to the active phase, where oscillations occur, and back.
where, ica(V) = g c a m ~ ( v ) ( v - Yea), ik(V) = gkW(V-- Vk), il(V) = g l ( v - - Vl), ikca(V, C) = gkcaZ(C)(V -- Vk), and icas(V,S) = gcasS(V - Yea). The constants are given by gca = 4.0, gk - 8.0, gl = 2.0, Vk = --84, Vt -- --60, Yea -- 120.0, I = 65, gkca - 1.0, ~b -1.333, e = 0.002, /z = 0.025, rs -- 0.05, and gcas = 1.0. The nonlinear functions are given by m ~ ( v ) = 0.5(1.0 + tanh((v + 1.2)/18)), w ~ ( v ) = 0.5(1.0 + tanh((v - 12.0)/17.0)), rw(V) = cosh((v - 12.0)/34.0), z(c) = c/(1 + c), and s o = 0.5(1 + tanh((v - 12)/24)).
2.3. Rigorous results f o r square-wave bursting solutions Here we present a theorem that addresses the issue of when, and in what sense, the heuristic description of a square-wave bursting trajectory given in Section 2.2.1 can be rigorously justified. The theorem implies that there may exist a small range of values of e for which the bursting trajectory is not uniquely determined; moreover, for exactly these values, the bursting solution does not closely follow the heuristically defined orbit. The reason why such values of e exist is related to the mechanism by which spikes are added as e decreases, as we describe here. A more complete discussion is given in [46]. For the following theorem, we consider (2.2) and assume that the geometric assumptions described in Section 2.2.1 are satisfied. We also need some technical assumptions concerning the bounded solutions of the fast subsystem (FS). We assume that each of the stable fixed points along the lower branch of S is hyperbolic, the manifold P of periodic solutions is normally hyperbolic, the right knee of S is nondegenerate, and the homoclinic
Geometric singular perturbation analysis of neuronal dynamics
107
orbit arises from the transverse intersection of stable and unstable manifolds. Finally, we assume that S, P, and orbits heteroclinic to S and P represent all the bounded solutions of (FS). THEOREM 2.1. The periodic bursting solution is uniquely determined and asymptotically stable f o r all values o f e > 0 sufficiently small except f o r those in a set o f the f o r m O. Moreover, U i % 1(ei -- 3i, ei + 6i) 9The F~i and 3i can be chosen so that limi__+e~ei 6i - - 6 i + 1 >
C182
and
~i ~ C2 e -k/ei
f o r some positive constants C1, C2 and k.
The proof of Theorem 2.1 is given in [46]. An important step in the proof is to explain how the bursting solution adds spikes as e varies. It is during these transitions that the heuristic construction is not justified. Here we give a geometric description of how these transitions take place. The number of spikes is determined by how many times the bursting trajectory spirals around in phase space near P. The active phase terminates when the bursting trajectory passes near the homoclinic orbit of (FS) and jumps down to the lower branch of S. The key to understanding how spikes are added, therefore, is to understand what determines when the trajectory jumps down to the silent phase. As we describe below, this crucially depends on the center-unstable and center-stable manifolds of the fixed points along the middle branch of S. The center-stable manifolds serve to separate those trajectories which continue to spiral in the active phase and those which jump down to the silent phase. Note that, when e = 0, there are two trajectories in the unstable manifold of each of the fixed points along the middle branch of S. The union of these trajectories forms the centerunstable manifold of the middle branch. One of these trajectories evolves towards the active phase, looping around the upper branch. Suppose that the homoclinic orbit of (FS) is at Y = Yh. If y < Yh, then this trajectory approaches one of the periodic solutions along P, while if y > Yh, then it ultimately approaches a stable fixed point along the lower branch. The other unstable trajectory evolves directly towards the silent phase and approaches the stable fixed point along the lower branch. Now the stable manifolds to the fixed points along the middle branch separate the two branches of unstable trajectories. Hence, if a trajectory lies close to the middle branch, it will either give rise to a spike or jump down to the silent phase depending on which side of the appropriate stable manifold it lies on. What we have described so far holds for e = 0, however, this all carries over for small e > 0. To make this more precise, let W~ and W~ be the union of all the stable and unstable manifolds to the fixed points along the middle branch when e = 0. (We exclude small neighborhoods of the left and right knees.) These are both smooth, two-dimensional, invariant manifolds. For e > 0, these manifolds perturb to manifolds Ws and W~ (see [23]), which are also both smooth, two-dimensional, invariant, and lie a Cl-distance O(e) close to W~ and W~ near the middle branch. If we let W~ = Ws n W~, then We, Ws, and We are the center, center-stable, and center-unstable manifolds corresponding to the middle branch, respectively. As discussed before, W~ divides Wff into two pieces; one piece 'points' towards the active phase, while the other piece 'points' towards the silent phase.
108
J.E. Rubin and D. Terman
We now can see the significance of this separation to bursting solutions. We begin a bursting solution in the active phase near the branch of periodic orbits P. The orbit gives rise to spikes as it tracks near P moving slowly to the right. As the orbit approaches the homoclinic orbit, it passes close to the middle branch. As long as the orbit lies on the 'jump-up' side of Ws , it will keep spiking. Once it crosses over to the other side of Ws, it will jump down to the silent phase. It is possible, however, that the orbit lies precisely on W~, and it is important to understand the fate of the trajectory in this case. If the orbit lies on Ws, then it must track close to the middle branch (actually we), slowly moving to the fight. The orbit eventually jumps down near the fight knee. Note that if we start (exponentially) close to W~, then the trajectory will track close to the middle branch for some finite distance before it either jumps up or jumps down. If the bursting solution behaves in this way, then it will not lie close to the heuristically defined bursting orbit. It is precisely this mechanism (lying close to W~) that can destroy the uniqueness and stability of the bursting solution. Now consider the transition of adding a spike as e decreases. Suppose, for concreteness, that when e = e2, (2.2) exhibits a solution with 2 spikes per burst and when e = e3, there are 3 spikes per burst. When e = e2, the bursting solution winds around P two times. After the second cycle, it lies on the jump-down side of Ws so it falls down to the silent phase. When e = e3, however, the bursting solution winds around P three times before jumping down. After two cycles, the solution still lies on the jump-up side of Ws, and thus it returns to the active phase. There must exist, therefore, some e* 6 (e3, e2) for which a burstinglike solution lies precisely in W~. It is for values of e very close to e* that the singular construction breaks down.
3. Two mutually coupled cells 3.1. Introduction In this section, we consider a network consisting simply of two mutually coupled cells. By considering such a simple system, we are relatively easily able to describe how we model networks of oscillators, the types of behavior that can arise in such systems and the mathematical techniques we use for the analysis of the behavior. For this discussion, we assume that each cell, without any coupling, is modeled as the relaxation oscillator v' = f (v, w), w' = eg(v, w).
(3.1)
Here e is assumed to be small; that is, w represents a slowly evolving quantity. We assume that the v-nullcline, f (v, w) = 0, defines a cubic-shaped curve and the w-nullcline, g -- 0, is a monotone decreasing curve which intersects f = 0 at a unique point p0, as shown in Figure 7. We also assume that f > 0 ( f < 0) below (above) the v-nullcline and g > 0 (< 0) below (above) the w-nullcline. If P0 lies on the middle branch of f - 0, then (3.1) gives rise to a periodic solution for all e sufficiently small and we say that the system is oscillatory. In the limit e --+ 0, one can construct a singular solution as shown in Figure 7.
Geometric singular perturbation analysis of neuronal dynamics
109
W
~
f=O
g =0
lP()
V
Fig. 7. Nullclines and singular periodic orbit for an oscillatory relaxation oscillator.
If P0 lies on the left branch of f = 0, then the system is said to be excitable; Po is a stable fixed point and there are no periodic solutions for all e small. System (3.1) can be viewed as a simple model for a bursting neuron in which the active phase corresponds to the envelope of a burst's rapid spikes. (See also [43].) Of course, a two-dimensional model for a single cell cannot exhibit the more exotic dynamics described in the previous section for a bursting cell. However, by considering a simple relaxationtype oscillator for each cell, we will be able to discuss how network properties contribute to the emergent behavior of a population of cells. It is, of course, a very interesting issue to understand how this population behavior changes when one considers more detailed models for each cell. Some results for more detailed models are given in [63]. Networks of two coupled cells may display a variety of different rhythms. By a synchronous solution, we mean a rhythm in which both cells exhibit exactly the same behavior, oscillating in phase with each other. An antiphase solution is shown in Figure 8A. This is the simplest example of what we will call a clustered solution. In a larger population of cells, the network is said to exhibit clustering if the population breaks up into distinct subgroups such that all of the cells within each subgroup are synchronized with each other, but cells belonging to different subgroups are desynchronized. Figure 8B shows a suppressed solution. One of the cells oscillates periodically between the silent and active phases, while the other cell always remains in the silent phase. A more exotic solution is shown in Figure 8C. During each period of oscillation, one of the cells fires two action potentials, while the other cell fires just one. In the next section, we describe how we model the two mutually coupled cells. The form of coupling used is referred to as synaptic coupling and is meant to correspond to a simple model for chemical synapses, the primary means by which neurons in the central nervous
110
J.E. R u b i n a n d D. T e r m a n
0.5
I
I
I
I
I
I
I
I
I
] I
j
i'
-0.5 0 0.5
200
400
600
800
1000 t
1200
1400
1600
1800
2000
I
I
I
I
I
I
I
I
I
[
I
I
I
200
400
600
800
1000 t
1200
1400
1600
1800
2000
-0.5 0 0.5
V
I
I
I
I
I '
0
iI
~
iI iI
Ii Ii
iI ii I
-0.5 0
I
I
I
I
1000
2000
3000 t
4000
5000
6000
Fig. 8. Nonsynchronous solutions for two mutually coupled cells [85]. Note that v represents a rescaled voltage. A. (top) Antiphase solution. B. (middle) Suppressed solution. C. (bottom) Two-to-one solution.
system communicate with each other. As we shall see, there are many different forms of synaptic coupling. For example, it may be excitatory or inhibitory and it may exhibit either fast or slow dynamics. We are particularly interested in how the nature of the synaptic coupling affects the emergent population rhythm. A natural question is whether excitatory or inhibitory coupling leads to either synchronous or desynchronous rhythms. There are four possible combinations and we will demonstrate that all four may be stably realized, depending on the details of the intrinsic and synaptic properties of the cells. Many of the results given here are complementary to those in [43] (Chapter 1 in this Handbook) which use the fast-slow structure in a somewhat different way.
3.2. Synaptic coupling We model a pair of mutually coupled neurons by the following system of differential equations !
vI -
f(vl, wl)
-
s2gsyn(l)l -
Ysyn),
Geometric singular perturbation analysis o f neuronal dynamics
111
!
w I -- e g ( v l , w l ) , l)~ - - f ( v 2 ,
(3.2)
1/22) - - S l g s y n ( V 2
-- Vsyn),
l
W 2 = 8 g ( v 2 , W2).
Here (vl, wl) and (v2, 1/22) correspond to the two cells. The coupling term Sj gsyn(1)i -- l)syn) can be viewed as an additional current which may change a cell's m e m b r a n e potential vi. The parameter gsyn corresponds to the maximal conductance of the synapse and is positive, while the reversal potential Vsyn determines whether the synapse is excitatory or inhibitory. If v < Vsyn along each bounded singular solution, then the synapse is excitatory, while if v > Vsyn along each b o u n d e d singular solution, then the synapse is inhibitory. The terms si, i = 1, 2, in (3.2) encode how the postsynaptic conductance depends on the presynaptic potentials vi. There are several possible choices for the si. The simplest choice is to assume that si = H ( v i - 0 s y n ) , where H is the Heaviside step function and 0syn is a threshold above which one cell can influence the other. Note, for example, that if vl < 0syn, then sl = H (vl - 0syn) -- 0, so cell 1 has no influence on cell 2. If, on the other hand, vl > 0syn, then sl = 1 and cell 2 is affected by cell 1. Another choice for the si is to assume that they satisfy a first order equation of the form !
S i - - C ~ ( 1 -- s i ) H ( v i
- 0syn) - f l s i ,
(3.3)
where ot and/~ are positive constants and H and 0syn a r e as before. Note that ot and 13 are related to the rates at which the synapses turn on or turn off. For f a s t synapses, we assume that both of these constants are O(1) with respect to e. For a slow synapse, we assume that ot = O(1) and/~ = O(e); hence, a slow synapse activates on the fast time scale but turns off on the slow time scale. The synapses considered so far are referred to as direct synapses since they are activated as soon as a m e m b r a n e potential crosses the threshold 0syn. To more fully represent the range of synapse dynamics observed biologically, it is also necessary to consider more complicated connections. These are referred to as indirect synapses, and they are m o d e l e d by introducing new dependent variables x l and x2. Each (xi, si) satisfies the equations x~ - - eOtx (1 -- x i ) H ( v i s] -- or(1 - s i ) H ( x i
-- 0v) -- e f l x x i ,
- Ox) - f l s i .
(3.4)
The constants ax and fix are assumed to be independent of e. The effect of the indirect synapses is to introduce a delay from the time one oscillator j u m p s up until the time the other oscillator feels the synaptic input. For example, if the first oscillator j u m p s up, a secondary process is turned on when vl crosses the threshold 0v. The synapse sl does not turn on until x l crosses 0~; this takes a finite amount of (slow) time since x l evolves on the slow time scale, like the wi. Note that indirect synapses m a y be fast or slow. For fast, indirect synapses, the turn off of si, after the xi-induced delay, occurs on the fast time scale.
J.E. Rubin and D. Terman
112
3.3. G e o m e t r i c a p p r o a c h All of the networks in this paper are analyzed by treating e as a small, singular perturbation parameter. As in the previous section, the first step in the analysis is to identify the fast and slow variables. We then dissect the full system of equations into fast and slow subsystems. The fast subsystem is obtained by simply setting e = 0 in the original equations. This leads to a reduced set of equations for the fast variables with each of the slow variables held constant. The slow subsystems are obtained by first introducing the slow time scale r = et and then setting e - - 0 in the resulting equations. This leads to a reduced system of equations for just the slow variables, after solving for each fast variable in terms of the slow ones. The slow subsystems determine the evolution of the slow variables while the cells are in either the active or the silent phase. During this time, each cell lies on either the left or the right branch of some "cubic" nullcline determined by the total synaptic input which the cell receives. This continues until one of the cells reaches the left or right "knee" of its corresponding cubic. Upon reaching a knee, the cell may either jump up from the silent to the active phase or jump down from the active to the silent phase. The jumping up or down process is governed by the fast equations. For a concrete example, consider two mutually coupled cells with fast, direct synapses. The dependent variables (vi, wi, si), i -- 1,2, then satisfy (3.2) and (3.3). The slow equations are 0-
f (vi, Wi) -- Sjgsyn(Vi -- Vsyn),
(3.5)
lbi -- g ( v i , tOi), 0 -- Or(1 -- Si) H (Vi -- 0syn) -- flSi,
where differentiation is with respect to r and i ~ j. The first equation in (3.5) states that (vi, w i ) lies on a curve determined by s j . The third equation states that if cell i is silent (vi < 0syn), then si -- O, while if cell i is active, then si -- ~ / ( ~ + fl) = SA. We demonstrate that it is possible to reduce (3.5) to a single equation for each of the slow variables wi. Before doing this, it will be convenient to introduce some notation. Let ~ ( v , w, s) =-- f ( v , w ) - gsynS(V - Vsyn). If gsyn is not too large, then each Cs = {q~(v, w, s) --0} defines a cubic-shaped curve. We express the left and right branches of Cs by {v - q~L(W, s)} and {v -- q~R(W, s)}, respectively. Finally, let GL(w,s)
- g(~L(W,S),
w)
and
GR(w,s)
- g(cI)R(YO, s), 11o).
Now the first equation in (3.5) can be written as 0 - q~(Vi, tOi, S j ) with sj fixed. Hence, Vi -- Cl)ot(Vi, Sj) where ot - L if cell i is silent and ot - R if cell i is active. It then follows that each slow variable wi satisfies the single equation lbi - G ~ ( w i , s j ) .
(3.6)
By dissecting the full system into fast and slow subsystems, we are able to construct singular solutions of (3.2), (3.3). In particular, this leads to sufficient conditions for when there exists a singular synchronous solution and when this solution is (formally) asymptotically
Geometric singular perturbation analysis of neuronal dynamics
113
stable. The second step in the analysis is to rigorously prove that the formal analysis, in which e = 0, is justified for small e > 0. This raises some very subtle issues in the geometric theory of singular perturbations, some of which have not been completely addressed in the literature. For most of the results presented here, we only consider singular solutions. We note that the geometric approach used here is somewhat different from that used in many dynamical systems studies (see, for example, [59]). All of the networks considered here consist of many differential equations, especially for larger networks. Traditionally, one would interpret the solution of this system as a single trajectory evolving in a very large dimensional phase space. We consider several trajectories, one corresponding to a single cell, moving around in a much lower dimensional phase space (see also [87,86,71,85,63]). After reducing the full system to a system for just the slow variables, the dimension of the lower dimensional phase space equals the number of slow intrinsic variables and slow synaptic variables corresponding to each cell. In the worst case considered here, there is only one slow intrinsic variable for each cell and one slow synaptic variable; hence, we never have to consider phase spaces with dimension more than two. Of course, the particular phase space we need to consider may change, depending on whether the cells are active or silent and also depending on the synaptic input that a cell receives.
3.4. Synchrony with excitatory synapses Consider two mutually coupled cells with excitatory synapses. Our goal here is to give sufficient conditions for the existence of a synchronous solution and its stability. Note that if the synapses are excitatory, then the curve CA -- C~A lies 'above' Co --= {f -- 0} as shown in Figure 9. This is because for an excitatory synapse, v < Vsyn along the synchronous solution. Hence, on CA, f ( v , w) = gsynSA(V -- Vsyn) < 0, and we are assuming that f < 0 above Co. If gsyn is not too large, then both Co and CA will be cubic shaped. We assume that the threshold 0syn lies between the two knees of Co. In the statement of the following result, we denote the left knee of Co by (VLK, WLK). THEOREM 3.1. Assume that each cell, without any coupling, is oscillatory. Moreover, assume the synapses are fast, direct and excitatory. Then there exists a synchronous periodic solution of (3.2) and (3.3). This solution is asymptotically stable if one of the following two conditions is satisfied. (H1) Of /Ow < O, Og/Ov > O, and Og/Ow < 0 near the singular synchronous solution. (H2) [g(VLK, WLK)I is sufficiently small. REMARK 3.1. We note that the synchronous solution cannot exist if the cells are excitable and the other hypotheses, concerning the synapses, are satisfied. This is because along a synchronous solution, each (vi, wi) lies on the left branch of Co during the silent phase. If the cells are excitable, then each (vi, wi) will approach the point where the w-nullcline {g -- 0} intersects the left branch of Co. The cells, therefore, will not be able to jump up to the active phase.
114
J.E. R u b i n a n d D. T e r m a n
lw
CA
Vsyn
v
Fig. 9. Nullclines for an oscillatory relaxation oscillator with (CA) and without (Co) excitatory coupling. Note that cell 2 responds to cell 1 through Fast Threshold Modulation.
REMARK 3.2. The assumptions concerning the partial derivatives of f and g in (H1) are not very restrictive since we are already assuming that f > 0 (< 0) below (above) the v-nullcline and g > 0 (< 0) below (above) the w-nullcline. REMARK 3.3. A useful way to interpret (H2) is that the silent phases of the cells are much longer than their active phases. This is because g(vLK, WLK) gives the rate at which the slow variables wi evolve near the end of the silent phase. Note that g(vLK, wLK) will be small if the left knee of Co is very close to the w-nullcline. PROOF. We first consider the existence of the synchronous solution. This is straightforward because along a synchronous solution (vi, wl, Sl) = (v2, w2, s2) = (v, w, s) satisfy the reduced system
v' = f (v, w)
-
Sgsyn(V -
Vsyn),
w' = eg(v, w), s' = c~(1 - s) H (v - 0syn) - / ~ s . The singular solution consists of four pieces. During the silent phase, s = 0 and (v, w) lies on the left branch of Co. During the active phase s = SA and (v, w) lies on the right branch of CA. The jumps between these two phases occur at the left and right knees of the corresponding cubics. We next consider the stability of the synchronous solution to small perturbations. We begin with both cells close to each other in the silent phase on the left branch of Co, with cell 1 at the left knee ready to jump up. We follow the cells around in phase space by
Geometric singular perturbation analysis of neuronal dynamics
115
constructing the singular solution until one of the cells returns to the left knee of Co. As before, the singular solution consists of four pieces. We need to show that the cells are closer to each other after this complete cycle than they were initially. The first piece of the singular solution begins when cell 1 jumps up. When Vl (t) crosses 0syn, SI (t) --+ SA. This raises the cubic corresponding to cell 2 from Co to CA. If ]Wl (0) w2(0)l is sufficiently small, corresponding to a sufficiently small perturbation, then cell 2 lies below the left knee of CA. The fast equations then force cell 2 to also jump up to the active phase, as shown in Figure 9. Note that this piece takes place on the fast time scale. Hence, on the slow time scale, both cells jump up at precisely the same time. During the second piece of the singular solution, both oscillators lie in the active phase on the right branch of CA. Note that the ordering in which the oscillators track along the left and right branches has been reversed. While in the silent phase, cell 1 was ahead of cell 2. In the active phase, cell 2 leads the way. The oscillators remain on the right branch of CA until cell 2 reaches the right knee. The oscillators then jump down to the silent phase. Cell 2 is the first to jump down. When v2(t) crosses 0syn, s2 switches from SA to 0 on the fast time scale. This lowers the cubic corresponding to cell 1 from CA to Co. If, at this time, cell 1 lies above the right knee of CA, then cell 1 must jump down to the silent phase. This will certainly be the case if the cells are initially close enough to each other. During the final piece of the singular solution, both oscillators move down the left branch of Co until cell 1 reaches the left knee. This completes one full cycle. To prove that the synchronous solution is stable, we must show that the cells are closer to each other after this cycle; that is, there is compression in the distance between the cells. There are actually several ways to demonstrate this compression; these correspond to two different ways to define what is meant by the 'distance' between the cells. Here we consider a Euclidean metric, which is defined as follows: Suppose that both cells lie on the same branch of the same cubic and the coordinates of cell i are (vi, wi). Then the distance between the cells is defined as simply [wl - wz]. Note that during the jump up and the jump down, this metric remains invariant. This is because the jumps are horizontal so the values of wi do not change. If there is compression, therefore, it must take place as the cells evolve in the silent and active phases. We now show that this is indeed the case if (H 1) is satisfied. Suppose that when r = 0, both cells lie in the silent phase on Co. We assume, for convenience, that w2(0) > wl (0). We need to prove that wz(r) - Wl (r) decreases as long as the cells remain in the silent phase. Now each wi satisfies (3.6) with oe = L and sj = 0. Hence,
wi(r)=wi(O)+ f0 T GL(wi(~),O)d~ and, using the Mean Value Theorem,
~T
1/72(l") -- Wl ('t') -- 1/)2(0) -- 1/)1 (0) -Jr= w 2 ( 0 ) - w,(0) +
G L ( ~ 2 ( ~ ) , 0) -- GL(1/dl (~), 0) d~
fo r -0-~w OGL (w*, 0)(w2(~) - wl(~))des (3.7)
116
J.E. Rubin and D. Terman !
for some w*. Now G L ( w , s ) = g(q~L(W), W). Hence, OGL/OW -- gv~L(W) + gu,. We asI sume in (H1) that gv > 0 and gw < 0 near the synchronous solution. Moreover, 4~L (w) < 0 because v = 4~L(w) defines the left branch of the cubic Co which has negative slope. It follows that OGL/OW < 0, and therefore, from (3.7), wz(r) - wl (r) < we(0) - wl (0). This gives the desired compression; a similar computation applies in the active phase. We note that if there exists g > 0 such that OGL/OW < --y along the left branch, then Gronwall's inequality shows that w2 (r) - w l (r) decreases at an exponential rate. We next consider (H2) and demonstrate why this leads to compression of trajectories. Suppose, for the moment, that g(VLK, WLK) = 0; that is, the left knee of Co touches the w-nullcline at some fixed point. Then both cells will approach this fixed point as they evolve along the left branch of Co in the silent phase. There will then be an infinite amount of compression, since both cells approach the same fixed point. It follows that we can assume that the compression is as large as we please by making g(VLK, WLK) sufficiently small. If the compression is sufficiently large, then it will easily dominate any possible expansion over the remainder of the cells' trajectories. This will, in turn, lead to stability of the synchronous solution. V3 REMARK 3.4. The mechanism by which one cell fires, and thereby raises the cubic of the other cell such that it also fires, was referred to as Fast Threshold Modulation (FTM) in [71 ]. There, a time metric was introduced to establish the compression of trajectories of excitatorily coupled cells, which implies the stability of the synchronous solution. A detailed discussion of the time metric can be found in [43]; see also [49]. REMARK 3.5. While the synchronous solution has been shown to be stable, it need not be globally stable. In [45], it is shown that this network may exhibit stable antiphase solutions if certain assumptions on the parameters and nonlinear functions are satisfied. We have so far considered a completely homogeneous network with just two cells. The analysis generalizes to larger inhomogeneous networks in a straightforward manner, if the degree of heterogeneity between the cells is not too large. The major difference in the analysis is that, with heterogeneity, the cells may lie on different branches of different cubics during the silent and active phases. The resulting solution cannot be perfectly synchronous; however, as demonstrated in [87], one can often expect synchrony in the jump-up, but not in the jump-down. Related work on heterogeneous networks include [72,55,8]. One may also consider, for example, an arbitrarily large network of identical oscillators with nearest neighbor coupling. We do not assume that the strength of coupling is homogeneous. Suppose that we begin the network with each cell in the silent phase. If the cells are identical, then they must all lie on the left branch of Co. Now if one cell jumps up it will excite its neighbors and raise their corresponding cubics. If the cells begin sufficiently close to each other, then these neighbors will jump up due to FTM. In a similar manner, the neighbor's neighbors will also jump due to FTM and so on until every cell jumps up. In this way, every cell jumps up at the same (slow) time. While in the active phase, the cells may receive different input and, therefore, lie on the right branches of different cubics. Once one of the cells jumps down, there is no guarantee that other cells will also jump down at this (slow) time, because the cells to which it is coupled may still receive input from other
Geometric singular perturbation analysis of neuronal dynamics
117
active cells. Hence, one cannot expect synchrony in the jumping down process. Eventually every cell must jump down. Note that there may be considerable expansion in the distance between the cells in the jumping down process. If ]g(VLK, WLK)] is sufficiently small, however, as in the previous result, then there will be enough compression in the silent phase so that the cells will still jump up together. Here we assumed that the cells are identical; however, the analysis easily follows if the heterogeneities among the cells are not too large.
3.5. Desynchrony with inhibitory synapses We now consider two mutually coupled cells with inhibitory synapses. Under this coupling, the curve CA now lies below Co. As before, we assume that gsyn is not too large, such that both Co and CA are cubic shaped. We also assume that the right knee of CA lies above the left knee of Co as shown in Figure 10. Some assumptions on the threshold 0syn are also required. For now, we assume that 0syn lies between the left knee of Co and right knee of CA. We will assume throughout this section that the synapses are fast, direct and inhibitory. The main results state that if a synchronous solution exists then it must be unstable. The network will typically exhibit either out-of-phase oscillations or a completely quiescent state and we give sufficient conditions for when either of these arises. We note that the network may exhibit bistability; both the out-of-phase and completely quiescent solutions may exist and be stable for the same parameter values. These results are all for singular solutions. Some rigorous results for e > 0 are given in [86]. The first result concerns the existence and stability of the synchronous solution.
W
g=0
CO
t
Vsyn
Fig. 10. Instability induced by mutual inhibition. Cell 2 jumps to CA when celll fires. The excitable case is shown, while the identical mechanism leads to the instability of the synchronous state in the oscillatory case.
118
J.E. Rubin and D. Terman
THEOREM 3.2. Assume that the synapses are fast, direct and inhibitory. If each cell without any coupling, is oscillatory and 0syn is sufficiently large, then there exists a singular synchronous solution. This solution is unstable. If each cell, without any coupling, is excitable, then there does not exist a singular synchronous solution. PROOF. The existence of a singular synchronous solution for oscillatory cells follows precisely as in the previous section. During the silent phase, the trajectory lies on the left branch of Co, while in the active phase it lies on the right branch of CA. Note that we require that the right knee of CA lies above the left knee of Co. Moreover, when the synchronous solution jumps up and crosses the threshold v = 0syn, it should lie to the right of the middle branch of CA; otherwise, it would fall down to the silent phase. This is why we assume that 0syn is sufficiently large. This solution is unstable for the following reason. Suppose both cells are initially very close to each other on Co. The cells then evolve on Co until one of the cells, say cell 1, reaches the left knee of Co. Cell 1 then jumps up to the active phase. When vl crosses the threshold 0syn, S1 switches from 0 to SA and cell 2 jumps from Co to CA, as shown in Figure 10. This demonstrates that the cells are uniformly separated for arbitrarily close initial data. The synchronous solution must, therefore, be unstable. The synchronous solution cannot exist if the cells are excitable for precisely the same reason discussed in the previous section. If such a solution did exist then each cell would lie on Co during its silent phase. Each cell would then approach the stable fixed point on this branch and would never be able to jump up to the active phase. D We next consider out-of-phase oscillatory behavior. One interesting feature of mutually coupled networks is that such oscillations can arise even if each cell is excitable for fixed levels of synaptic input. The following theorem gives sufficient conditions for when this occurs. We will require that the active phase of the oscillation is sufficiently long. To give precise conditions, we introduce the following notation. Assume that the left and right knees of Co are at (1)LK, tOLK) and (URK, WRK), respectively. If the w-nullcline intersects the left branch of CA, then we denote this point by (VA, WA) = PA- We assume that WA < WLK, as shown in Figure 10. Let "rL be the (slow) time it takes for the solution of (3.6) with ot = L and s = SA to go from w = WRK to W = WLK, and let "t'R be the time it takes for the solution of (3.6) with ot = R and s = 0 to g o f r o m w -- WLK to W ~ WRK. Note that "rL is related to the time a solution spends in the silent phase, while rR is related to the time a solution spends in the active phase. THEOREM 3.3. Assume that the cells are excitable for each fixed level of synaptic input and the synapses are fast, direct, and inhibitory. Moreover, assume that WA < WLK and rE < rR. Then the network exhibits stable out-of-phase oscillatory behavior. REMARK 3.6. We do not claim that the out-of-phase solution is uniquely determined or that it corresponds to antiphase behavior. These results may hold; however, their proofs require more analysis than that given here.
Geometric singular perturbation analysis of neuronal dynamics
119
REMARK 3.7. The rest state with each cell at the fixed point on Co also exists and is stable. Hence, if the hypotheses of Theorem 3.3 are satisfied, then the network exhibits bistability. PROOF. Suppose that we begin with cell 1 at the right knee of Co and cell 2 on the left branch of CA with WA < w2(0) < WLK. Then cell 1 jumps down and, when vl crosses the threshold 0syn, cell 2's cubic switches from CA to Co. Since w2(0) < wLK, cell 2 lies below the left knee of Co, so it must jump up to the active phase. After these jumps, cell 1 lies on the left branch of CA, while cell 2 lies on the right branch of Co. Cell 2 then moves up the right branch of Co while cell 1 moves down the left branch of CA, approaching PA. This continues until cell 2 reaches the right knee of Co and jumps down. We claim that at this time, cell 1 lies below the left knee of Co, so it must jump up. We can then keep repeating this argument to obtain the sustained out-of-phase oscillations. The reason why cell 1 lies below the left knee of Co when cell 2 jumps down is because it spends a sufficiently long amount of time in the silent phase. To estimate this time, note that because cell 2 was initially below the left knee of Co, the time it spends in the active phase before jumping down is greater than rR. Hence, the time cell 1 spends in the silent phase from the time it jumps down is greater than rR > rL. From the definitions, since cell 1 was initially at the right knee of Co, it follows that cell 1 must be below the left knee of Co when cell 2 jumps down, which is what we wished to show. [2 REMARK 3.8. To obtain sustained oscillations, it is not really necessary to assume that each cell is excitable for all levels of synaptic input. Suppose, for example, that the wnullcline intersects Co along its middle branch, but it intersects CA along its left branch. Then each cell, without any coupling, is oscillatory. The hypothesis rL < rR is no longer necessary for sustained out-of-phase oscillations. If rL > rR, then it is possible that both cells will lie in the silent phase on the left branch of Co at the same time. If there is no fixed point of this branch then the leading cell will be able to jump up. At this time, the trailing cell will approach the left branch of CA and remain there until the leading cell jumps down. The trailing cell may then either jump up, if it lies below the left knee of Co, or it may jump back to the left branch of Co. In this latter case, it will eventually jump up when it reaches the left knee of Co. REMARK 3.9. Wang and Rinzel [95] distinguish between "escape" and "release" in producing out-of-phase oscillations. In the proof of the preceding theorem, the silent cell can only jump up to the active phase once the active cell jumps down and releases the silent cell from inhibition. This is referred to as the release mechanism and is often referred to as postinhibitory rebound [24]. To describe the escape mechanism, suppose that each cell is oscillatory for fixed levels of synaptic input. Moreover, one cell is active and the other is inactive. The inactive cell will then be able to escape the silent phase from the left knee of its cubic, despite the inhibition it receives from the active cell. Note that when the silent cell jumps up, it inhibits the active cell. This lowers the cubic of the active cell, so it may be forced to jump down before reaching a right knee. These issues are also discussed in [43], where there is a detailed discussion of properties of the antiphase solutions, including the control of their frequencies.
120
J.E. Rubin and D. Terman
3.6. Synchrony with inhibitory synapses 3.6.1. Introduction. In the previous section, we showed that an inhibitory network cannot exhibit stable synchronous oscillations if the synapses are direct and fast. Synchronous oscillations in an inhibitory network have been observed experimentally, however [77,79, 98]. We now show that these oscillations are possible with slow and indirect synapses. Recall that the synapse is slow if ot = O(1) and fl - - O ( e ) with respect to e. We now assume that fl = e K where K does not depend on e. As before, we analyze the network by considering singular solutions. The first step in this analysis is to derive fast and slow equations. This is done in the next subsection. We then show that the synchronous solution may exist with either direct or indirect slow synapses and that this solution cannot be stable if the synapses are direct. In Section 3.6.5, we state the main result concerning the stability of the synchronous solution with indirect synapses. This result is proved in [85]. We then demonstrate that mutually coupled networks with slow inhibitory synapses may exhibit numerous other types of solutions besides the synchronous one. In fact, all of the solutions shown in Figure 8 are generated by this class of networks. 3.6.2. Fast and slow equations. We derive slow subsystems valid when the cells lie in either the silent or the active phase. There are several cases to consider and we only discuss two of these in detail. Here, we only consider direct synapses; the derivation of the slow equations for indirect synapses is very similar. If both cells are silent, then vi < 0syn and the first term in (3.3) is zero. Hence, after letting ~: = et and setting e = 0, (3.2) and (3.3) become 0--
f ( v i , W i ) -- S j g s y n ( V i --
lbi ~- g ( v i ,
l)syn),
tO/),
(3.8)
Si -- -- K s i ,
where j :~ i. This system can be simplified as follows. We write the left branch of C~ as v = q~L(W, s) and let GL(W, s) = g(q~L(W, s), s). Each (wi, sj) must then satisfy the system
&=GL(w,s),
(3.9)
~= -Ks.
These equations determine the evolution of the slow equations while in the silent phase. If both cells are active, then si is a fast variable. The only slow variables are the wi. Instead of (3.8), the slow equations are now 0 - ~ f (l)i, Wi) -- gsyn(1)i -1]Oi -- g(13i, Wi ), l=si.
Vsyn), (3.10)
Geometric singular perturbation analysis of neuronal dynamics
121
This can be reduced to a system for just the slow variables as before. Denote the right branch of C, by v = q~R(W, s) and let GR(w,s) = g(~R(W,S),S). Then each wi satisfies the scalar equation tb = GR(W, 1).
(3.1 1)
In a similar fashion, we can derive the slow subsystem for when one cell is active and the other is silent. For indirect synapses, there are further cases depending on whether the xi-variables have crossed their threshold 0~ or not. This is discussed in detail in [85]. 3.6.3. Existence of synchronous oscillations. The singular synchronous solution is easily constructed; here we consider the case of direct synapses. We begin with both cells at the right knee of the right branch of C j. From this point, the cells jump down to the silent phase. While in the silent phase, the slow variables evolve according to (3.9). The cells can only leave the silent phase once they reach a left knee of one of the left branches. If the cells are able to reach such a point, then they will jump up to the active phase and return to the starting point. Hence, the existence of the synchronous solution depends on whether the cells can reach one of the jump-up points while in the silent phase. If the cells are oscillatory, then the synchronous trajectory must reach one of the jumpup points. This is demonstrated in [85], where it is also shown that a synchronous solution can exist even though both cells, without any coupling, are excitable. This will be the case if the rate K of decay of inhibition is small enough and the cells are oscillatory for some fixed values of s E (0, 1); if the cells are excitable for all s c [0, 1], then the only stable solution is the quiescent resting state. Exit from the silent phase is not possible if K is too large, since then the inhibition decays quickly and the system behaves in the slow regime like the uncoupled excitable system with s -- 0. The construction of the synchronous solution for the case of indirect synapses is very similar. There are some additional complications due to the additional slow variables xi. The complete analysis is given in [85]. 3.6.4. Instability of the synchronous solution for direct synapses. The synchronous solution is not stable when the synapses are direct for precisely the same reasons described in Section 3.5. This holds because with direct synapses, when one cell jumps, the other cell begins to feel inhibition as soon as the first cell's membrane potential crosses threshold. This instantly moves the second cell away from its threshold by an amount that stays bounded away from zero no matter how close to the first cell the second cell starts. Thus, infinitesimally small perturbations are magnified, at this stage of the dynamics, to finite size, and the synchronous solution cannot be stable. 3.6.5. Statement of the main result. We now consider indirect synapses and show that the synchronous solution can be stable in some parameter ranges. We shall show that there are two combinations of parameters that govern the stability. Furthermore, only one of those two combinations controls stability in any one parameter regime.
122
J.E. Rubin and D. Terman
For this result, it is necessary to make some further assumptions on the nonlinearities and parameters in (3.2) and (3.4). It will be necessary to assume that fw < 0 ,
gv > O
and
gu, < O
(3.12)
near the v-nullcline. For Theorem 3.4 below, we also assume that f (v, w) is given by f (v, w) = f l (v) - gcw(v - VR),
where gc > 0 and VR ~< Vsyn represent a maximal conductance and reversal potential, respectively. This holds for the well-known Morris-Lecar equations [51]. The analytical framework we develop, however, also applies to more general nonlinearities which satisfy (3.12). Some technical assumptions are also required on the nonlinear function g(v, w). We need to assume that gv is not too large near the right branches of the cubics Cs, for example. We assume that the parameters O~x and fl~ are sufficiently large, and c~.r/(C~x +/3x) > Ox. This guarantees that each xi can cross its threshold in order to turn on the inhibition. Precise conditions on how large Oex and fix must be are given in [85]. We also need to introduce some notation. Let a_ be defined as the minimum of - O g / O w over the synchronous solution in the silent phase. Note from (3.12) that a_ > 0. Let (w*, s*) = (WE(S*), s*) be the point where the synchronous solution meets the jump-up ' (s*) be the reciprocal slope of the jump-up curve at this point in curve, and let )~ = w E (w, s)-space. Finally, let a+ denote the value of g(v, w) evaluated on the right hand branch of Co at the point where the synchronous solution jumps up. The main result is then the following. THEOREM 3.4. Assume that the nonlinear functions and parameters in (3.2) and (3.4) satisfy the assumptions stated above. I f fl = e K with K < a_ and Ks* < a+/I)~l, then the synchronous solution is asymptotically stable. REMARK 3.10. The first condition in Theorem 3.4 is consistent with the numerical simulations of [95], who obtained synchronized solutions when the synapses recovered at a rate slower than the rate at which the neurons recovered in their refractory period. REMARK 3.1 1. To interpret the second condition in Theorem 3.4, note that Ks* is the rate of change of s at the point at which the synchronous solution jumps, while a+ is the rate of change of w on the fight hand branch right after the jump. Since )~ = d w L / d s , multiplication by I)~l transforms changes in s to changes to w. Thus, the second condition is analogous to the compression condition that produces synchrony between relaxation oscillators coupled by fast excitation as described in Theorem 3.1 of Section 3.4. I~,l may be thought of as giving a relationship between the time constants of inhibitory decay and recovery of the individual cells; a larger I)~l (corresponding to a flatter jump-up curve) means that a fixed increment of decay of inhibition (As) has a larger effect on the amount of recovery that a cell must undergo before reaching its (inhibition-dependent) threshold for activation.
Geometric singular perturbation analysis of neuronal dynamics
123
REMARK 3.12. The two conditions given in the statement of Theorem 3.4 correspond to two separate cases considered in the proof of Theorem 3.4. These two cases correspond to whether the two cells preserve their orientation (case 1) or reverse their orientation (case 2) on the right branch of the s -- 1 cubic after one cycle. Theorem 3.4 says that, whatever case the synchronous trajectory falls into, if both conditions hold, then the synchronous solution is stable. Note, however, that the different cases require different conditions. Case 1 requires K < a_ and case 2 requires Ks* < a+/l,kl. Thus, by changing a parameter, such as gsyn, that switches the system between cases 1 and 2, one can change which combinations of time scales and other parameters control the stability of the synchronous solution. In particular, stability of synchronous solutions can be lost or gained without changing any time constants. See [85] for details. REMARK 3.13. In this section, we have considered rather simple models for each cell; in particular, each cell contains a single channel state variable w and there is only one intrinsic slow process. In this case, the synchronous solution can be stable only if the synaptic variable decays on the slow time scale. This is true even if the cells are oscillatory [85,64]. In fact, if the cells are excitable, then the slow synaptic variable is required even for the existence of a synchronous solution; it allows the cells to escape from the silent phase. In [63-65], more complicated models for the cells are considered. It is shown that mutually coupled networks with more complex cells can give rise to stable synchronous solutions even if the cells are excitable for all s E [0, 1] and the synapses are fast; the synapses must still be indirect, however. The main conclusion of the analysis in [63] is that what is needed for the existence of stable synchronous solutions is the presence of two slow variables; one of these slow variables may correspond to an intrinsic process and the other to a synaptic process, or both slow variables may correspond to intrinsic processes. REMARK 3.14. The models discussed here represent bursting neurons. Synchronization of spiking neurons, namely neurons with very short active phases, that are connected by inhibition is considered in [90,25,6,43]. We have also assumed that cells and coupling are homogeneous. The effect of heterogeneities on cells coupled with inhibition is analyzed in [26,97,12].
3.6.6. Nonsynchronous solutions. The network of two mutually inhibitory cells can display other behaviors. We will not give rigorous conditions for the existence and stability of these other solutions; instead, we give simulations of the other solutions and a general description of the parameter ranges in which they are expected. The heuristic explanations we give are based on the techniques developed in the previous section. For all of the examples, we consider direct synapses, although the analysis for indirect synapses is very similar. We start with the antiphase solution. Such a solution is shown in Figure 8A. The antiphase solution is the most well-known solution for a pair of mutually inhibitory oscillators, expected when the inhibition decays at a rate faster than the recovery of the oscillator (K/a_ large); see, for example, [94,68]. Though K/a_ small favors stability of the synchronous solution and K/a_ large favors the existence of a stable antiphase solution, there is a parameter range in which both solutions are stable.
124
J.E. Rubin and D. Terman
s = 1
C 2(0) = C 12 2 ) _..,,
~(~1 )
CELL 2 t CELL I
'
'
'
' ""lb~
. . . . . . . .
C l ( Z 1)
c1(0)
I
Fig. 11. The projection of an antiphase solution onto (w, s) [85]. One-half of a complete cycle is shown; during this time, cell 1 remains silent (solid curve). The dashed curve shows the evolution of cell 2 in the silent phase, while the dotted curve shows its evolution in the active phase; cell 2 jumps up at time rl and jumps down at time r2.
One can describe the evolution of the antiphase solution in phase space in a way that is similar to the description of the synchronous solution given earlier. In Figure 11, we illustrate the projection of an antiphase solution onto the (w, s) plane. We choose the initial (slow) time so that both cells lie in the silent phase after cell 1 has just jumped down from the active phase. This implies that the inhibition sl felt by cell 2 satisfies Sl (0) = 1. Both cells then evolve in the silent phase until cell 2 reaches the jump-up curve, say at time r -rl. At this time, the inhibition s2 felt by cell 1 jumps up to the line s -- 1. Cell 2 then evolves in the active phase; we illustrate the projection of cell 2's trajectory during the active phase with a dotted curve in Figure 11. Note that sl (r) still satisfies kl = --Ksl; hence, it keeps decreasing while cell 2 is active. During this time, cell 1 lies in the silent phase with s2 -- 1. This continues until cell 2 reaches the jump-down curve WR(s). We denote this time as r2. Cell 2 then jumps down and this completes one-half of a complete cycle. For this to be an antiphase solution, we must have that wl (r2) = w2(0) and sj (r2) = s2(0). Rigorous results related to the existence and stability of antiphase solutions for systems with slow inhibitory coupling are given in [86,62]. In the introduction to this section, we referred to another kind of nonsynchronous solution obtained in this system as a suppressed solution; an example is shown in Figure 8B. In such rhythms, one cell remains quiet while the other oscillates. They occur in the same parameter range as the stable synchronous solutions, i.e., K / a _ small. The behavior of these solutions is easy to understand: if the inhibition decays slowly enough, the leading cell can recover and burst again before the inhibition from its previous burst wears off enough to allow the other cell to fire. This type of solution cannot exist if the cells are excitable rather than oscillatory, since there is no input from the quiet cell to drive the active one. On the other hand, suppressed solutions only arise if the cells are excitable for some fixed levels of inhibition; i.e., some s ~ (0, 1]. If this is not the case, then the w-coordinate of the
Geometric singular perturbation analysis of neuronal dynamics
125
suppressed cell must keep decreasing until that cell eventually reaches the jump-up curve and fires. If the synaptic inhibition decays at a rate comparable to the recovery of the cell, complex hybrid solutions can occur, in which one cell is suppressed for several cycles, while the other fires, and then fires while the other is suppressed. An example is shown in Figure 8C. In this example, each cell is excitable when uncoupled but is oscillatory for some intermediate levels of inhibition. Hence, if K / a _ is sufficiently small, then a cell can fire a number of times while the other cell is suppressed. The inhibition of the firing cell must eventually wear off, such that that cell can no longer fire. This then allows the inhibition of the suppressed cell to wear off to the level from which it can fire. The roles of the two cells are then reversed. The synchronous solution exists stably in parameter regimes in which one or more of the above nonsynchronous solutions is also stable. Thus the choice of solution depends on the initial condition. The basin of attraction of the synchronous solution depends mainly on the delay of the onset of the inhibition. For a trajectory to be in the domain of attraction of the synchronous solution, the lagging cell must be activated before the inhibition from the leading cell suppresses it. As the onset time of inhibition decreases, the domain of stability of the synchronous state vanishes, but the nonsynchronous solutions remain.
3.7. Desynchrony with excitatory synapses We now briefly discuss results in [5] which demonstrate that excitatory coupling can lead to almost synchronous solutions if the active phase of a single cell is much shorter than the silent phase; that is, the cells here correspond to spiking neurons. This work is motivated by simulations in [55] which showed that there can be a stable state close to synchrony when the fully synchronized state is unstable. Here we write the equations for a single oscillator as
v'--f(v,w),
(3.13)
w' = eg(v, w)/r~c(V), where the function r ~ ( v ) is given by
vo, ifv>~v0.
1
r~c(v)-
if v
Vst, the effect of the coupling term is to raise the nullcline and change its shape; if gsyn is not too large, then the v-nullcline is still qualitatively cubic. We denote this cubic by Cl. Note that there are two thresholds vo and Vst in the equations. To simplify the discussion, we assume here that Vst = vo. As in previous sections, we analyze the solutions by treating e as a small, singular perturbation parameter. We construct singular solutions after formally setting e -- 0. An interesting feature of the model considered here is that the structure of the corresponding flows is quite different depending on whether cells are silent or active. We first demonstrate how to construct a singular periodic orbit for a single uncoupled cell. When e is set equal to 0 in (3.13), we obtain the equations for the fast flow -
v' = f (v, w), ,
w --0
(3.15)
if v < vo and v' = f (v, w), w tm vg(v,w)
(3.16)
if v >~ vo. By introducing the rescaling r = et into (3.13) and then setting e -- 0, we obtain equations for the slow flow in the silent phase, 0 = f (v, w), = g(VL(W), w)
(3.17)
if v < vo, where I)L(W) is obtained by solving 0 = f ( v , w) along the left branch of the cubic Co. Note that Equations (3.15) and (3.17) are simply scalar equations; in (3.15), the variable w serves as a parameter in the v' equation. The full two-dimensional system (3.13) has been reduced to two one-dimensional equations and solutions of these are easy to characterize. However, (3.16) is not reduced. In other fast-slow systems of the form (3.13), typically the entire v-nullcline consists of rest points for the fast flow. In this case, however, only the portion of Co with v < vo consists of rest points. The singular periodic orbit for a single uncoupled cell is constructed as follows. We begin the orbit with the cell at the left knee of Co, which we denote by (VLK, WLK). The first part of the singular orbit is a solution of (3.15) which connects (VLK, WLK) and (vo, WLK). The second part is a solution of (3.16) which connects (vo, WLK) to (vo, Wh), where Wh > WLK; this corresponds to the active phase. The third part is a solution to (3.15) which connects (vo, Wh) back to Co at some point (VL(Wh), Wh). The fourth and final part is a solution to (3.17) which connects (VL(Wh), Wh) to (I)LK,WLK). The construction of a synchronous solution for the coupled system is done in the same manner as that of the periodic solution for the uncoupled cell; the only difference is that the
127
Geometric singular perturbation analysis o f neuronal dynamics
dynamics are changed as the voltage passes across vst -- vo. Thus, if each (3.16) is replaced by v; -- f (v, w ) - gsyn(V - Vsyn), !
w --vg(v,w).
Vi > ldst,
then
(3.18)
The synchronous solution is not the same as the uncoupled periodic solution, since they satisfy different equations while in the active phase. There is no difficulty in proving that these singular periodic solutions perturb, for s > 0 small, to actual solutions of either (3.13) or (3.14). See, for example, [50]. The actual periodic orbits for s small lie O(s) close to the singular orbits, except near the left knee of Co, where the distance is O(s 1/2). To construct the almost-synchronous solutions, we again work with singular solutions. There are now more cases to consider, depending on which of the cells is silent or active. If both cells are silent (that is, each vi < vo), then the fast flow corresponding to each cell is given by (3.15), while the slow flow is given by (3.17). If both cells are active, then the fast flow for each cell is (3.18); there is no slow flow. Finally, suppose that one of the cells, say cell 1, is active and cell 2 is silent. Then the fast flow for cell 1 is (3.16) and the fast flow for cell 2 is v' -
f (v, w )
w' -- 0.
-
gsyn(V - Vsyn),
(3.19)
There is no slow flow for this case since all cell 1 dynamics in the active phase occurs on the fast time scale. We now give a heuristic argument to explain why there may exist a stable almost synchronous solution. We describe the construction of a singular solution of (3.14) in which one of the cells, say cell 1, begins at the left knee of Co and cell 2 lies on the left branch of Co just above cell 1. We follow the cells around in phase space until one of the cells returns to the left knee. If the other cell returns to the initial position of cell 2, then this will correspond to an almost synchronous solution. As in the previous constructions, the singular solution consists of several pieces. The first piece starts as cell 1 leaves the left knee; it satisfies (3.15), moving horizontally in (v, w)-space, until it crosses vo. Suppose that this occurs when t - tl. At this time, H ( v l -- vo) switches from 0 to 1 and cell 2 then satisfies (3.19). If cell 2 initially lies below the left knee of Cl, then it will jump up, continuing to satisfy (3.19) until v2 crosses vo. Suppose that this occurs when t = t2. For tl < t < t2, cell 1 satisfies (3.16). Note that its trajectory is no longer horizontal. We assume in this heuristic argument that vl > vo for tl < t < t2. When t - t2, H ( v 2 - vo) switches from 0 to 1 and both cells then satisfy (3.18). Assume that cell 1 is the first cell to cross vo again and this occurs when t - Tl. Then cell 2 satisfies (3.16) until it crosses vo, say when t = T2. Once a cell crosses vo, it moves horizontally to a point on the left branch of Co. The cells then evolve along the left branch of Co until one of the cells returns to the left knee and this completes the cycle. We note that it is possible for either of the cells to be the first to reach the left knee.
128
J.E. Rubin and D. Terman
The singular flow naturally gives rise to a one-dimensional map, which we denote by 17. More precisely, if (v2, w2) is the initial position of cell 2 on the left branch of Co and @, ~) is the position of the trailing cell after the other cell has returned to the left knee, then 17(1/32) - - ~ . This map is well defined if tO2 - - tOLK is sufficiently small; in particular, this requires that cell 2 initially lies below the left knee of the excited cubic C l. A fixed point of H corresponds to a periodic singular almost-synchronous solution. The orbit may be orientation preserving or orientation reversing, depending on whether the first cell to reach the left knee of Co is cell 1 or cell 2, respectively. This periodic solution is referred to as an O(e)-synchronous solution for the following reason. The analysis demonstrates that if w, is the fixed point of 17, then this must lie below the left knee of the excited cubic C1. Hence, if cell 1 is the first to jump up, then cell 2 will jump up as soon as cell 1 crosses vo. The difference between the times the cells reach vo is therefore O(1) in t-time. Since the total period in t-time is O(1/e), the normalized time difference (Atime/period) is O(e). We prove the existence of an asymptotically stable fixed point of 17 by showing that H defines a uniform contraction on some interval. We find A l < A2 such that 17 maps the interval [Al, A2] into itself. In particular, H(A1) > Al so expansion between cells takes place if they are initially close to each other. This leads to instability of the synchronous solution. The reason why this expansion takes place is because the cells satisfy different equations during their initial times in the active phase. Cell 1 does not feel excitation from cell 2 when it first enters the active phase, so it satisfies (3.16) there. Cell 2, on the other hand, does feel excitation from cell 1 when it enters the active phase, so it satisfies (3.18). Note that in Section 3.4, we proved that the synchronous solution is stable for excitatory synapses if there is slow dynamics in both the silent and active phase. The main difference between the analysis for that system and the one considered here arises during the jumping up process. In Section 3.4, the jump-ups are horizontal and it does not matter that different cells satisfy different fast equations during portions of the jump-ups. Here the jump-ups are not horizontal, so expansion of trajectories can arise. We conclude by stating two theorems proved in [5]. We will need the following notation. Assume that the right knee of C1 is at (I)RK, tORK) and choose fl so that g(fl,//)RK) = 0. We say that constants 61 and 62, which depend on V, are O(v) apart if there exist K I and K2 such that K19/ < 161 -- 62 ] < K2)I for V small. THEOREM 3.5. Suppose that the constants vo and fl satisfy one of the following conditions: (R) Either vo > fl, or vo < ~ and fl - vo is sufficiently small. (P) vo < fl and gsyn is sufficiently small. Then, for g sufficiently small, there exist A1 < A2 such that H defines a uniform contraction from the interval [A1, A2] into itself If w, is the resulting asymptotically stable fixed point of 17, then w, and WLK are O(y) apart. If (P) is satisfied, then 17 is orientation preserving on (A1, A2), while if (R) is satisfied, then 17 is orientation reversing on (AI, A2).
THEOREM 3.6. The asymptotically stable singularperiodic solution given by Theorem 3.5 perturbs, for e > O, to an asymptotically stable O(e)-solution of (3.14).
Geometric singular perturbation analysis of neuronal dynamics
129
4. Globally inhibitory networks 4.1. Introduction We now consider the network illustrated in Figure 12. This is composed of a population of excitatory (E-)cells and a single inhibitory (J-)cell. Each E-cell sends excitation to the J-cell, while the J-cell sends inhibition back to every E-cell. We assume that all of the E-cells are identical, but they may differ from the J-cell. This network, analyzed in [63, 62] is motivated by models for thalamic oscillations involved in sleep rhythms. In those networks, there may be a population of J-cells with inhibitory coupling among the Jcells. This application is explored in Section 5. This type of network was also introduced in [87,91 ] as a model for scene segmentation. We distinguish two types of rhythms in which the network may engage. In a synchronous oscillation, the E-cells are completely synchronized. When the E-cells fire, or become active, they excite the J-cell to fire in response. However, the J-cell is not necessarily synchronized with the E-cells throughout the entire oscillation; this is because the J-cell need not have the same intrinsic properties as the E-cells. Alternately, in a clustered oscillation, the E-cells form subpopulations or clusters; the cells within a cluster fire synchronously but cells from distinct clusters act out of synchrony from each other. The J-cell will be induced to fire with each cluster. Two types of solutions for a network with just four E-cells are shown in Figure 13. Figure 13A shows a synchronous solution, while a 2-cluster oscillation is shown in Figure 13B. Note that in each of these figures, the E-cells within a cluster are perfectly synchronized; moreover, the J-cell jumps up together with each cluster. To obtain the different cluster states, as well as a 3-cluster state (not shown), we adjusted a parameter in the equations for the J-cell; this parameter controls the duration of the J-cell's active phase, which, in turn, controls the amount of inhibition sent back to the E-cells. The analysis that follows will clarify why the level of inhibition produced by the J-cell is an important factor in determining the network behavior of the E-cells. We model the globally inhibitory network as follows (see [63,62]). Here we assume that all of the synapses are direct. Each Ei satisfies equations of the form v;
11)i'
s~
f (vi, wi) -- eg(vi, Wi),
--
-
-
or(1
-
ginhSJ(Vi
si)H(vi
--
Vinh), (4.1)
-O)
- flsi,
Inhibition
Excitation
J-cell
0 0
0
0 0
E-cells
Fig. 12. Globally inhibitory network. The J-cell inhibits the E-cells, which excite the J-cell.
J.E. Rubin and D. Terman
130
-10
r
\
-20
\
-30
I
I
.......
I
.....
J
\ \
\
\ \ \
_
\
\
-40
\ \
\
\
\
-50
\
\
\
_ \
-60
_
-70
_
-80
0
I
20
40
60
80
1O0 t
120
140
160
I
I
I
I
I
I
I
I
-20 -40-30--
." "
v -50 _
6
iI
~ \
l
.'1
\~
E2
200
. \
19
0
180
".. ~.
....... ~ . . . . .
-70 -80
0
I
20
i
40
I
i
60
80
I
1O0 t
i
120
I
140
J
160
I
180
200
Fig. 13. Solutions for a globally inhibitory network of four E-cells and one J-cell. A. (top) A synchronous solution; the solid curve is the time course of E-cell voltage and the dashed curve is the time course of J-cell voltage. B. (bottom) A 2-cluster solution; the solid and dotted curves are the voltage time courses of two different E-cell clusters of two cells each. The dashed curve is the time course of J-cell voltage. Note that the J-cell fires less powerful, shorter bursts in B than in A.
while the J-cell satisfies the equations ,
Vj-
1
f J ( V J , Wj) -- ~
S i g e x c ( V J - Vexc),
Z i
(4.2)
tOj - - 6 g J ( l ) J , WJ), S~ - - OtJ(1 -- sJ)H(uJ - - O J ) -- 6 g j s j .
Unlike the previous section, we assume f > 0 ( f < 0) above (below) the v-nullcline for sj = 0 and g > 0 (g < 0) below (above) the w-nullcline. The nullclines are illustrated in Figure 14. Note that the nullclines are "upside-down" relative to the figures in Section 3. This orientation is motivated by the biological model in Section 5. The variable sj denotes the inhibitory synaptic input from the J-cell, while si denotes the excitatory synaptic input from cell Ei to the J-cell. The sum in (4.2) is taken over
Geometric singular perturbation analysis of neuronal dynamics
A) /
PL
/
131
sj=l
sj - 0
Ei
W
B) ~
~
Sto t -- 0 -..-..
J
/
Q2
./ Stot-- SA
Qo 1
wj
Fig. 14. Nullclines for (A) E-cells and (B) J-cells in a globally inhibitory network [63]. The heavy lines and points Pi, Qi correspond to the singular synchronous solution discussed in the text. Note that sj decays on the slow time scale.
all N Ei-cells. Note that turn on of inhibition and excitation both occur on the fast time scale, while the inhibitory variable sj turns off on the slow time scale. This turn off may be 'fast' or 'slow', depending on whether Kj is large or small. We assume that/3 = O(1), representing fast turn off of excitation, although there is no problem extending the analysis if/3 = O(s). Note that if 1)i > 0, then Si ---> S A -m- Ol/(Ol -+- fl) on the fast time scale. Each synapse in (4.1) and (4.2) is direct. If the inhibition is indirect, then sj satisfies system (3.4), with the appropriate adjustment of subscripts and a new variable xj included, instead of the equation given in (4.2). Indirect synapses will be necessary to obtain stability of synchronous and clustered solutions to (4.1) and (4.2). As in previous section, we analyze this network by constructing singular solutions. The trajectory for each cell lies on the left (right) branch of a cubic nullcline during the silent (active) phase. Which cubic a cell inhabits depends on the total synaptic input that the cell receives. Nullclines for the Ei are shown in Figure 14A and those for J in Figure 14B. Note in Figure 14A that the sj -- 1 nullcline lies above the sj = 0 nullcline, while in Figure 14B, the Stot ~ ~1 Z Si -- SA nullcline lies below the Stot - - 0 nullcline These relations hold because the Ei receive inhibition from J while J receives excitation from the Ei. We
132
J.E. Rubin and D. Terman
assume that each cell is excitable for fixed levels of synaptic input. In the next section, we give sufficient conditions, first presented in [63], for when a globally inhibitory network exhibits a stable synchronous solution. Clustered oscillations are considered in Section 4.3, which follows [62]. Analyzing the stability of clustered solutions entails consideration of two issues, namely what prevents separate clusters from firing together and what maintains the synchrony of the cells belonging to the same cluster. Note that these issues may become especially subtle in cases for which a clustered solution is stable but the completely synchronous state is unstable.
4.2. Synchronous solution We now give sufficient conditions for the existence of a singular synchronous periodic solution and for its stability. For existence, we assume that each synapse is direct; there is no problem in extending the analysis to indirect synapses. Indirect synapses are needed for the stability of this solution. To state the main result, it is necessary to introduce some notation. Let Cs denote the cubic f ( v , w) - g i n h S ( V - - Vinh) = 0. Since the E-cells are excitable for fixed levels of the inhibitory input sj, there is a fixed point on the left branch of Cs of the first two equations in (4.1) with s = sj held constant. We denote this fixed point by (VF(Sj), WF(SJ)) and the left knee of Cs by (VL(Sj), WL(Sj)). THEOREM 4.1. A singular synchronous periodic solution exists if WF(1) > WE(0), Kj is sufficiently large, the active phase of the J-cell is sufficiently long, and the recovery of the J-cell in the silent phase is sufficiently fast. If the inhibitory synapse sj is indirect and the active phase of the J-cell is long enough, then the synchronous solution is stable. REMARK 4.1. The condition WF(1) > I/)L ( 0 ) simply states that the fixed point on the left branch of C l lies above the left knee of Co. This allows the possibility of the E-cells firing upon being released from inhibition from the J-cell. REMARK 4.2. Recall that K j corresponds to the rate of decay of the inhibition. We will see that synchronous oscillations cannot exist if this synaptic decay rate is too slow, given the fact that each E-cell is excitable for fixed levels of synaptic input. PROOF. We prove the existence by demonstrating how to construct the singular synchronous solution if the hypotheses of Theorem 4.1 are satisfied. We assume throughout this construction that the positions of the E-cells are identical. The singular trajectory is shown in Figure 14. We begin with each cell in the active phase just after it has jumped up. These are the points labeled P0 and Q0 in Figure 14. Then each Ei evolves down the right branch of the sj = 1 cubic, while J evolves down the right branch of the Stot - - SA cubic. We assume that the J-cell active phase is long, such that the Ei have a shorter active phase than J; thus, each Ei reaches the right knee PI and jumps down to the point P2 before J jumps down. The assumption of a long J-cell active phase implies that at this time, J lies above the right knee of the Stot = 0 cubic; otherwise, J would jump down as soon as the E i did. J
Geometric singular perturbation analysis of neuronal dynamics
133
must therefore jump from the point Q I to the point Q2 along the Stot - - 0 cubic when the Ei jump down. On the next piece of the solution, J moves down the right branch of the Stot = 0 cubic while the Ei m o v e up the left branch of the s~ = 1 cubic. When J reaches the right knee Q3 it jumps down to the point Q 4 o n the left branch of the Stot = 0 cubic. Now the inhibition sj to the Ei starts to turn off on the slow time scale; that is, k~ = - K j s j f o r ' = - d / d r , r -- et. Thus, the Ei do not jump immediately to another cubic. Instead, the trajectory for the Ei m o v e s upwards, with increasing wi, until it crosses the w nullcline. Then each wi starts to decrease. If the Ei are able to reach a left knee, then they jump up to the active phase and this completes one cycle of the synchronous solution. When the Ei jump up, J also jumps up if it lies above the left knee of the Stot = SA cubic; that is, the recovery of the J-cell in its silent phase must be sufficiently fast. Existence of the synchronous solution requires that the E-cells can reach the jump-up curve and escape from the silent phase. We demonstrate that this is indeed the case if the assumptions of Theorem 4.1 are satisfied. It will be convenient to first introduce some notation. This will allow us to obtain simple estimates for when a synchronous oscillation exists and what the period of the oscillation is. This notation will also be useful in the next section. As in earlier sections, we derive equations for the evolution of the E-cells' slow variables; these are (wi, sj). Let v = q~L(W, s) denote the left branch of the cubic f ( v , w) ginhS(V -- Vinh) = 0, and let GL(w, s) = g(q~L(W, s), s). Then each (wi, sj) satisfies the slow equations 6o =
GL(w,
kj -- - K j s j .
sj),
(4.3)
Figure 15 illustrates the phase plane corresponding to this system. Recall that w = WE(sj) denotes the jump-up curve or curve of left knees, and the second curve, which is denoted by WF(Sj), consists of the fixed points of the first two equations in (4.1) with the input sj held constant. This corresponds to the w-nullcline of (4.3). We need to determine when a solution (w(r), sj(r)) of (4.3), beginning with sj(0) = 1 and w(0) < WF(1), can reach the jump-up curve WL(Sj). This is clearly impossible if WF(1) < WE(0). If WF(1) > WE(0) and w(0) > WE(0), with Kj sufficiently large, then the solution will certainly reach the jump-up curve; this holds because the solution will be nearly vertical, as shown in Figure 15. If, on the other hand, Kj is too small, then the solution will never be able to reach the jump-up curve. Instead, the solution will slowly approach the curve WF(Sj) and lie very close to this curve as sj approaches zero. This is also shown in Figure 15. We conclude that the cells are able to escape the silent phase if the inhibitory synapses turn off sufficiently quickly and the w-values of the cells are sufficiently large when this turn off begins. Escape is not possible for very slowly deactivating synapses (although it would be possible with slow deactivation if the cells were oscillatory for some levels of synaptic input). We assume that Kj is large enough so that escape is possible. Choose West so that the solution of (4.3) that begins with sj (0) = 1 will be able to reach the jump-up curve if and only if w(0) >Wesc. The existence of the singular synchronous solution now depends on whether the Ei lie in the region where wi > West when J jumps down to the silent phase.
134
J.E. Rubin and D. Terman
,
W
Wv(1)
+ ~,.~
9
./j/.. ~
Sj
l
;~i,"
~
-w, K j large
,,;.?" _.,*::>'" t v
W
wv(O)
K j small
we(O)
Fig. 15. The slow phase plane for an E-cell [63]. The curve WL(Sj)is the jump-up curve, which trajectories reach if Kj is large enough. The dotted curve WF(Sj)consists of zeros of GL(w, sj) in system (4.3); trajectories tend to WF(0) as sj ~ 0 for smallKj. Note that wt < 0 for w > WF.
This will be the case if the active phase of J is sufficiently long. One can give a simple estimate on how long this active phase must be as follows. Let rE (rj) denote the duration of the E-cell (J-cell) active phase. Further, let w + denote the value of w at the right knee of the sj = 1 cubic (see Figure 15). If gsyn is not too large, then w + < WL(0). Finally, let rest denote the time for wi to increase from w + to West under tb - GL(W, 1). Since the Ei spend time rj - rE in the silent phase before they are released from inhibition, the singular synchronous solution exists if resc < rj - rE. For the stability of the synchronous solution, we need to assume that sj corresponds to an indirect synapse, as in Section 3.6. Suppose we slightly perturb the synchronous solution. If sj is direct, then when one E-cell fires, it will excite the J-cell which will, in turn, inhibit the other E-cells on the fast time scale. This will prevent the other E-cells from firing and desynchrony will result. The compression of trajectories if sj is indirect and the J active phase is long enough follows because all the E-cells approach exponentially close to the point wF(1) in the silent phase while the J-cell is still active. This exponential compression easily dominates any possible expansion over the remainder of the cells' trajectories. The domain of attraction of the synchronous solution depends on the ability of the Ecells to pass through the 'window of opportunity' provided by the indirect synapse. The size of this domain grows as the J-cell's active phase increases: More powerful J-cell bursts provide increased inhibition to the E-cells and this further compresses the E-cells near the point wF(1) in the silent phase. We note that this source of compression in globally inhibitory networks is considerably more powerful than any compression mechanism in mutually coupled inhibitory networks. D
Geometric singular perturbation analysis of neuronal dynamics
135
REMARK 4.3. The analysis leads to simple formulas for the period of the synchronous solution. Let r~ be, as above, the time cell J spends in the active phase and let rs be the time for the E-cells to reach the jump up curve after the J-cell jumps down. Then the period of the synchronous solution is simply rj + rs. Now rj is determined by the dynamics of the J-cell, while rs is primarily controlled by the rate at which the synapses turn off; this is the parameter Kj in (4.3). Other parameters play a secondary role. Note, for example, that the parameter gsyn mildly influences the period by controlling the slope of the jump up curve. REMARK 4.4. The domain of attraction of the synchronous solution increases with Kj, since a large Kj yields rapid decay of sj. If Kj is too large, however, then the J-cells actually cannot recover in time to respond to the excitation from the firing E-cells. Hence, this analysis shows that the combination of fast J-cell recovery and a large Kj promotes stable synchronization. REMARK 4.5. An important difference between mutually coupled and globally inhibitory networks arises in the way they use inhibition to synchronize oscillations. In mutually coupled networks with a slow decay of inhibition, the slow decay allows the cells to escape from the silent phase and to come together as they evolve in phase space. In globally inhibitory networks, the J dynamics controls synchronization, and a decay of inhibition on the slow time scale is only needed to allow J-cell recovery.
4.3. Clustered solutions 4.3.1. Singular orbit. Here we describe the singular trajectory corresponding to a 2cluster solution. The number of cells in the network may be arbitrary, but we assume for ease of notation that the clusters have equal numbers of cells. The geometric construction will require certain assumptions on the equations and a precise theorem is stated and proved in the following subsections. As we shall see, the construction of a 2-cluster solution easily generalizes to an arbitrary number of clusters. For the geometric construction of a singular 2-cluster solution, it suffices to consider only one-half of a complete cycle. During this half-cycle, one cluster, call it El, fires, say at r = 0, and evolves to the initial position of the other cluster; the non-firing cluster, call it E2, evolves in the silent phase to the initial position of El. By symmetry, the solution then continues with the roles of the clusters reversed. When El jumps up, it forces J to jump up to the right branch of the Stot - - I S A cubic. Then El moves down the right branch of the sj = 1 cubic, while J moves down the right branch of the S t o t - I SA cubic and E 2 m o v e s up the left branch of the sj -- 1 cubic. We assume, as before, that the E-cells in E I have shorter active phases than the J-cell, so Ei jumps down before J does. The assumption that J has a longer active phase than El implies that it lies above the right knee of the Stot = 0 cubic at this time, so it moves down the right branch of the Stot = 0 cubic until it reaches the right knee and then jumps down. During the time that J remains active, both El and E2 move up the left branch of the sj = 1 cubic.
136
J.E. Rubin and D. Terman
After J jumps down, sj(r) slowly decreases. If E2 is able to reach the jump-up curve, then it fires and this completes the first half cycle of the singular solution. Suppose that r -- rF when this occurs. By abuse of notation, let wi denote the w-value of all cells in cluster El. For the trajectories described above to represent one-half of a 2-cluster solution, we need that w2(rF) = Wl (0), Wl (rF) = W2(0), and WJ(I'F) - - W J ( 0 ) . The analysis in Section 4.3.3 shows that a 2-cluster solution will exist, with stability between clusters, if the active phase of J is not too long or too short, compared with the active phase of the El. If J ' s active phase is too long, then the network exhibits synchronous behavior as described before. If J ' s active phase is too short, then the system approaches the stable quiescent state. To conclude that the 2-cluster state is stable, we must also consider stability within each cluster. The stability mechanism here is similar to that for a synchronous solution; as discussed further in Section 4.3.3. Since each cluster experiences a decay of inhibition and subsequent re-inhibition between firings, stability within clusters does not require as long a J-cell active phase as does stability of the synchronous solution. The singular trajectory for an n-cluster oscillation represents a natural generalization of that for the 2-cluster oscillation. In the singular n-cluster solution, if we start when the Jcell falls down, then inhibition to the E-cells decays until one E-cluster fires and causes the J to fire; while these are active, the other n - 1 E-clusters evolve in the silent phase. The active E-cluster falls down before the J-cell, and the E-clusters then evolve in the silent phase such that each cluster reaches the initial position of the cell ahead of it in the firing sequence at the moment that the J-cell falls down. Precise conditions for the existence and stability of such a solution are given in the next subsection. 4.3.2. Statement of the main result. In this subsection, we state our main result concerning the existence and stability of clustered solutions. To clarify the presentation and notation, we will make some simplifying assumptions. A more complete presentation is given in [62]. We begin by discussing the notation that is needed. While all cells in the network are silent, the E-cell slow variables (wi, sj) satisfy (4.3). Let WL(Sj) and wF(sj) be as in the previous section. We assume that fu, > 0 near the singular solutions. Since sj represents inhibitory input, implicit differentiation of the first l f equation in (4.1) then yields that WL(SJ) and WF(SJ) are both positive. As in the previous section, we assume that wF(1) > WE(0) and that Kj is sufficiently large to guarantee that escape from the silent phase is possible. Thus, there exists West such that the solution of (4.3) beginning at (w0, 1) will reach the jump-up curve if and only if w0 > West. We denote by rs the time it takes for this solution to reach the jump-up curve. Note that rs depends on the initial position w0; however, we ignore this dependence here to simplify notation. Otherwise, we could state our results in terms of minimum and maximum times "t'~nin and r~nax. Note also that West --+ tOL (0) and rs ~ 0 as Kj ~ cx). Let resc, rE and rj be as in the previous section. Recall that resc is the time for w to increase from w + to Wesc under tb - GL(W, 1). Since Kj is large and rs is thus small, it follows that the time for w to increase from w + to Wesc, with several excursions from sj -- 1 of duration rs, is still approximately resc; we use this below but again, a notational adjustment suffices if more precise conditions are desired (see [62]).
Geometric singular perturbation analysis of neuronal dynamics
137
Finally, we need to assume that the J cell jumps up if it receives excitation from sufficiently many E cells. Let C sJ denote the J cell cubic when the J cell receives excitation of strength S t o t - S. Note that (4.2) has a fixed point on the left branch of C0J, call it w J(0). The J can jump up upon receiving excitation of strength S if and only if it lies above the left knee of w~ (S) when it is excited. Thus, we assume that there exists M such that if m >~ M, then tOJ
(m) ~SA
rest, (ii) (n -- 1)rj -- rE + (n -- 2)rs < rest.
l f n rE -r resc. This is exactly the condition derived before for the existence of a synchronous solution. Here, condition (ii) is not relevant. For the 2-cluster case, conditions (i) and (ii) reduce to rj - rE j
where, as before, the i~j(X, Ol) are the eigenvalues of the Jacobian matrix f~ (x, or). This function vanishes at a Hopf bifurcation point, where there is a pair of eigenvalues X 1,2 = +ico0. Clearly, 7rH is also zero if there is a pair of real eigenvalues ~,1
:
K,
~,2
:
--K.
We have to exclude such points when looking for Hopf bifurcations.
160
W.-J. Beyn et al.
DEFINITION 3.3.
A Hopf point (xo, oto) in a one-parameter system (1) is called simple if
/2(0) = Re[p*ii(c~o)q] r 0, where q, p 6 C" satisfy fOq _ icooq,
fO, p _ -icoop X
~
p*q -- 1
'
and d
A(OI) ---- ~
fx(Xe(Ol), Ol) - fxx(Xe(Ol), Ol).~e(Ol) nt- frot(Xe(Ol), Ol),
and where Xe(Ol) denotes the continuation of the equilibrium x0 for oe close to or0. It is easy to show that/2(0) is exactly the u-derivative of the real part of the critical pair of eigenvalues )~1,2(c~) = #(c~) 4- io)(c~), when it crosses the imaginary axis. The following theorem is then obvious, since
~(Ol)-- E1 (~. 1(or)
+ ~.2(ot))
THEOREM 3.2. The test function (10) has a regular zero at a simple Hopf point. The Jacobian of (8) is nonsingular at such a point, and Newton's method can be applied. As in the fold case, one can compute (10) without explicit computation of the eigenvalues of fx (Fuller [30], Guckenheimer and Myers [37]), by using the bialternate product defined in Section 1: THEOREM 3.3 (St6phanos [75]). Let A be an n x n matrixwith eigenvalues Jkl, ).2 . . . . . Then: (i) A (3 A has eigenvalues ~i ~.j, (ii) 2A (3 In has eigenvalues )~i nt- ~.j, w h e r e i = 2 , 3 . . . . . n; j = 1 , 2 . . . . . i - 1 .
~.n.
Therefore, the test function (10) can be expressed as
~H(X, Or)- det(2fx(x, or) (2) In).
(11)
The definition of the bialternate product (see Section 1) leads to the following formula for the elements of 2A @ I,:
(2A (3 In)(p,q),(r,s)=
--aps
ifr =q,
a pr
if r 7~ p and s = q,
app nt- aqq
if r = p and s = q,
aqs
if r = p and s r q,
--aqr
if s = p,
0
otherwise.
Numerical continuation, and computation of normal forms
16 1
Thus, given the matrix A, the computation of the elements of 2A 63/,7 can be efficiently programmed. Also, in Section 3.4, we give an efficient method for computing a function whose value is proportional to (1 1), by solving an extended linear system.
3.3. L o c a t i n g codimension-1 bifurcations o f p e r i o d i c solutions We now describe test functions for the location of codimension-1 bifurcations of periodic solutions in terms of the Jacobian matrix A = p~ of the Poincar6 map associated with the periodic solution: x w-~ P (x, ot ),
x ~ ]Rz'-I
~ ~ IR l
where x provides a smooth parametrization of a codimension-1 cross-section to the closed orbit. Let/z l, #2 . . . . . //,,7-l be the multipliers of the periodic solution, i.e., the eigenvalues of A evaluated at the fixed point corresponding to the periodic solution. Adding #,z -- 1 gives the set of Floquet multipliers introduced in Section 2.3. There are three generic codimension-1 bifurcations of periodic solutions: fold, flip (period-doubling), and Neimark-Sacker (torus) bifurcations. At a f o l d point, the matrix A has a simple unit multiplier #j = 1; at a flip point there is a simple multiplier #~ -- - 1 ; at a torus bifurcation A has a pair of non-real multipliers on the unit circle: #1,2
--exp(+i00),
0 < 00 < Jr.
In each of these cases, we assume that the critical eigenvalues are the only eigenvalues of A on the unit circle. The following test functions locate fold, flip, and Neimark-Sacker bifurcations, respectively: 11-- 1
Of -- U (#i - 11,
(12)
i=1
n-1
On- H(gi
+ 1),
(13)
i=1
7tNS -- 1-I (/zi/zj -- 1).
(14)
n>i>j
To detect a true Neimark-Sacker bifurcation, we must check that ~PNS -- 0 due to nonreal multipliers with unit product: ~i ~ j " - 1. As in the previous section, we can express the test functions (12)-(14) in terms of the Jacobian matrix, namely, Of -- det(A - L , - l ), O n - det(A + L,-l), O N S - det(A 63 A -
In,),
W.-J. Beyn et al.
162
where m -- 89 - 2)(n - 1). The last formula follows from statement (i) of St6phanos' theorem. Using the definition of the bialternate product we get
(A G A)(p,q),(r,s) -- apraqs - aqraps. Actually, a fold point can be more easily detected as an extremum point of the orcomponent of the (discretized) periodic solution branch. For the flip and torus bifurcations, the following approach is often applicable. Recall the BVP (4)-(6) for computing a periodic solution. After discretization, for example, using finite differences or collocation, these equations can be solved by Newton's method. Often the Newton matrix can be numerically decomposed such that the approximate monodromy matrix V (1) (see Section 2.3) is implicitly obtained as a by-product, namely in the form A1 V (1) = - A 0 , for certain nonsingular n x n-matrices A0 and A l; see Doedel et al. [25]. The test functions for flip and torus bifurcation can then be expressed as 1 0n = ~ d e t ( - A 0 + A l), detAl 1 ONs = det(A0 @ A0 - A 1 Q) A l). (detAl @ A1)
To obtain the last test function, we used the identities (AB) (7) (AB) = (A @ A)(B @ B) and (A @ A)-1 = A - 1 Q) A - I . These test functions are used in C O N T E N T (Kuznetsov and Levitin [52]).
3.4. Test functions defined by bordering techniques As we have seen, the detection of codimension-1 bifurcations of stationary and periodic solutions can be reduced to the detection of zeros of certain determinants along the corresponding branches. The numerical computation of a determinant of a square matrix is a simpler task than computing all its eigenvalues. However, scaling problems can arise when the system dimension is large. The following bordering technique avoids such scaling problems. The idea is to construct a scalar function g = g(s) that vanishes simultaneously with the determinant of a parameter-dependent (n x n)-matrix B(s). Suppose that the determinant vanishes at, say, s = 0, and also assume that the eigenvalue )~ = 0 of B0 = B(0) is geometrically simple. Such a g -- g(s) can be computed as the last component of the solution vector to the (n + 1)-dimensional bordered system:
. q0
.0)(.)(0; 0
g
--
1
,
where q0, p0 EI[{ n are certain fixed vectors.
(15)
Numerical continuation, and computation of normal forms LEMMA 3.1 (Keller [421).
163
lf qo q~~(B~) and Po q~~(Bo), then the matrix
M(s) _ ( B(S)q~ PO is nonsingular for all sufficiently small Isl. Therefore, generically, Equation (15) has a unique solution. In practical computations, the vectors q0, p0 should be adapted along the solution branch to make M(s) as wellconditioned as possible. Note that g(s) is proportional to det B(s). Indeed, by Cramer's rule
g(s) =
det B(s) det M(s) '
so g (0) -- 0. Moreover, if s = 0 is a regular zero of the determinant then it is also a regular zero of g. A more general result is given in Section 5. The function g(s) serves as a test function for the fold bifurcation if we let B(s) = f~(x(s), c~(s)), where (x(s), a(s)) is a regular parametrization of the equilibrium branch near the fold. For the detection of a Hopf bifurcation, one can use g(s) for
B(s) - 2 f , (x(s), oe(s)) 63 I,,. Taken literally, this method only applies when n is relatively small. To detect Hopf bifurcation in large systems, the method can be applied after reduction to an invariant subspace corresponding to the dominant eigenvalues; see, for example, the discussion in Govaerts et al. [34]. Alternatively, detection of Hopf bifurcation in such systems can be based on computing dominant eigenvalues using standard numerical linear algebra. If A is the Jacobian matrix of the Poincar6 map, then (15) with
B = A-L,, B = A+In, B = A63A-Ln, gives test functions for the fold, flip, and torus bifurcations, respectively. REMARK. The bordering approach can also be used to detect codimension-1 bifurcations of periodic solutions without explicit computation of the Jacobian matrix of the Poincar6 map. We illustrate this below for the case of the flip (period-doubling) bifurcation. Consider the BVP (4)-(6) for the continuation of a periodic solution. For given (x (-), T), introduce the following auxiliary BVP for (v(-), G) with fixed bordering functions ~oo,7t0:
I v'(t) = T f~(x(t), a)v(t) - Gqgo(t), v(1) -
-v(o),
fd v*(t)d/o(t)dt- 1
(16)
164
W.-J. Beyn et al.
(cf. Equation (15)). The functions r and 7r0 are selected to make (16) uniquely solvable, which is always possible. The solution component G of (16) defines a functional
which can serve as a test function for the flip bifurcation. Indeed, if G = 0 then the first equation in (16) reduces to the variational equation of the periodic solution x(t). The last equation in (16) normalizes the variational solution v(t), and the boundary condition v(1) = - v ( 0 ) corresponds to the multiplier # = - 1 of the Poincar6 map at the flip bifurcation.
4. Branch switching In this section we consider the computation of solution branches that emanate from certain bifurcation points. Specifically, we consider stationary solutions near simple branch points, and periodic solutions near Hopf and near period-doubling points.
4.1. The algebraic branching equation "]1~n + l ~ ~n be as in Equation (2). A solution Xo = X(so) of f ( X ) = 0 is called a simple singular point if fo _ f x (Xo) has rank n - 1. In the parameter formulation,
Let f
where f o _ ( f o I fo), we have that X0 - (x0, or0) is a simple singular point if, and only if, (i) dimA/'(f ~ - 1, f o 6 7~(fo), or (ii) dimA/'(f ~ = 2, f o ~ Tc(fo). Suppose we have a solution branch X (s) of f (X) = 0, where s is some parametrization. Let X0 ---- (x0, or0) be a simple singular point. Then we must have .A/'(f~ = Span{~b,, ~2},
A/(f ~
= Span{~r}.
From differentiating f ( X ( s ) ) = 0, we also have f o _ f ( X o ) - O, f ~ f o x XoXo + f o J(o -- 0. Thus 2(o = ot4~l + fl~2, for some or, fl 6 R l , and
O, and
lP*fOx (O/~bl -~- fl~b2)(ot~bl -~- fl~b2) -b ~*fOz~'O--0. Above, the second term is zero, and we can rewrite the equation as
Cl leg2 -+- 2Cl20tfl -+- C22fl 2 -- 0,
(17)
where l -
r
f~
,
f~
-
r
f~
Equation (17) is the algebraic branching equation (ABE); see Keller [42]. If the discriminant is positive, that is, if c22 - Cl lC22 > 0, then the ABE has two real nontrivial, linear
Numerical continuation, and computation of normalforms
165
independent solution pairs (or l, ill) and (ol2, f12), which are unique up to scaling. In such case we have a simple branch point, that is, two distinct branches pass through Xo. REMARK. Branch points are not a generic phenomenon in one-parameter solution families: they disappear under generic perturbations of the equation f (X) = 0, giving rise to nonintersecting branches. However, in systems with certain symmetries or invariant planes, branch points appear in a persistent manner. 4.2. Branch switching at simple branch points The direction vector of a bifurcating branch can be written Y0 = c~4~l + fl~b2, where (or, fl) is a root of the ABE (17). (Here we write "Yo" in order to distinguish this direction vector from the direction vector X0 of the "given" branch at the branch point.) We can take 4)1 = X0. Then (otl, fit ) -- (1,0) must be a root of the ABE and we must have cll -- 0. If A > 0 then also c12 # 0. The second root then satisfies 012/fl2 = -c22/2c12. To evaluate cl2 and C22 we need the nullvectors. Note that ~ is a simple nullvector of f o , . We already have
f~
chosen ~bl -- )~0. Choose 4)2 • ~bl. Then 4)2 is a nullvector of the matrix ()?~).
REMARK. Note that the above matrix is also the Jacobian of Keller's continuation system at X0. Its null space is indeed one-dimensional at a simple singular point. This implies that ~BP -- det
j~,
(18)
is a test function for singular points. This test function has a regular zero at simple branch points (for a proof, see Keller [43], or Kuznetsov [49]). Locating a branch point of the curve (2) using (18) might be difficult, since the domain of convergence for the Newton corrections (3) shrinks as one approaches such a point. This difficulty can be avoided by introducing (p, fl) E R 'l • •l and considering the extended system (see Moore [58] and Mei [56]): f (x, a) + tip - 0,
f,*(x,~)p - o , p* f~(x, a) --0, p ' p - 1--0.
(19)
A simple branch point (x0, c~0) corresponds to a regular solution (x, c~, fl, p) = (x0, or0, 0, p0) to (19). Therefore, the standard Newton method can be applied directly to (19) to locate a simple branch point. After determining the coefficients or2 and fi2, one must scale the direction vector Y0 = 0/2q91 + fl2~2 of the bifurcating branch so that IlY0ll- 1. The first solution X l on the bifurcating branch can now be computed from
f(Xl) =0,
(Xj - Xo)*I;'o- As = 0 .
(20)
166
W.-J. Beyn et al.
As initial approximation to X1 we can use X(l~ = X0 § As I;'0. For a graphical interpretation see Figure 3. This method is implemented in several codes, including STAFF (Borisyuk [10]), PITCON (Rheinboldt and Burkardt [63]), and C O N T E N T (Kuznetsov and Levitin [52]). Instead of Equations (20), one can also use f(Xl) =0,
(XI - Xo)*~b2 - As -- 0,
where (])2 is the second null vector of f o , with (])2 -[- q~l, t~l -- Xo. For a graphical interpretation see Figure 4. This method is implemented in AUTO and works very well in many applications, although there may be situations where it fails. Its advantage is that it does not require the computation of second order derivatives.
A s
Fig. 3. Switching branches using the correct branching direction.
~2
j m
_
As
Fig. 4. Switching branches using the orthogonal direction.
Numerical continuation, and computation of normal forms
167
4.3. Approximation of periodic solutions near a Hopf point Let (x0, or0) be a simple Hopf bifurcation point of Equation (1). By the Hopf Bifurcation Theorem, this ensures the existence of a bifurcating branch of periodic solutions. Moreover, one has the following asymptotic estimates for periodic solutions near the Hopf bifurcation: X(t" 8) -- XO 4- 8(/)(t) 4-
O(82),
T(e) -- TO 4- O(e2),
~ 0 eigenvalues in the left-half plane and nu >~ 0 eigenvalues in the right-half plane (counting multiplicity), with nu + ns -- n - 1, and in addition the stable and unstable sets B s (xo) and B u (xo) intersect transversally along Xh (t), i.e., for each t 6 ]Rl , c o d i m ( T x h ( t ) B s (xo) + Txh(t)BU(xo)) = O.
(37)
REMARKS. (1) In (37), for both tangent spaces to be defined, it is implicit that x h ( t ) does not lie in the boundary of either B u (x0) or B s (xo), that is {Xh(t) I t ~ IR l } qs W s (xo) U W u (xo). Orbits which violate this condition we refer to as n o n - c e n t r a l s a d d l e - n o d e h o m o c l i n i c orbits (see Figure 5(b)). (2) Unlike Definition 6.1 above, we have not said anything about non-degeneracy with respect to the parameter, but this can be ensured by assuming that ot is well-chosen so that the equilibrium undergoes a simple fold bifurcation upon varying or.
Fig. 5. Illustrating (for n = 2, nc = 1, ns = 1, nu = 0), the differencebetween: (a) a codimension-1 central saddlenode homoclinic orbit, obeyingDefinition 6.2, and (b) a codimension-2 non-central saddle-node homoclinic orbit.
Numerical continuation, and computation of normal forms
179
Indirect methods for computing homoclinic orbits include numerical shooting (Hassard [39], Kuznetsov [48], Rodrfguez-Luis et al. [64]) and continuation of periodic solutions (as in Section 2) up to large period (Doedel and Kern6vez [19]). In this section we shall focus on a direct formulation as a two-point boundary-value problem which may then be solved using continuation methods, as outlined in Section 2 above, to trace out codimension-1 paths of homoclinic solutions in a two-parameter plane.
6.1. A truncated boundary-value problem Equation (1) subject to (36) defines a boundary-value problem on the real line, which cannot be solved directly for t e ( - c o , +co). There are two main approaches for defining problems on finite intervals. One is to use a different parametrization than time, say the arclength along the orbit, and the other is to truncate to t 9 ( - T _ , T+) for some suitably chosen T+ and approximate boundary conditions. We shall concentrate on the truncation method, but the interested reader is referred to Liu et al. [53,54], Moore [59], Bashir-Ali [5] for recent developments in arclength methods. Suppose now that xh (t) is a regular homoclinic orbit to the equilibrium x0 at parameter value or0. If x0 is hyperbolic, there exists a unique equilibrium Xe(O~) for all ot close to or0 such that Xe(Ot0) -- x0. If, on the other hand, x0 is a saddle-node equilibrium, we set Xe(OI) ~ XO.
Consider the following boundary-value problem on an infinite interval x' (t) = f (x(t), o~),
(38)
lim x ( t ) =Xe(Ot).
(39)
t---+-+-oo
Note that any homoclinic solution to the equilibrium Xe is a solution of (38)-(39). Since any time shift of the solution x ( t ) is still a solution, a condition is required to fix the phase. Suppose that some initial guess Z(t) for the solution is known. Then the following integral phase condition
f ~ (x(t) - $(t)) *$' (t) dt - 0
(40)
oo
is a necessary condition for a minimum of the L2-distance between x and s over time shifts (cf. Equation (6)). The boundary-value problem (38)-(40) defined on an infinite time-interval can be approximated by truncation to a finite interval [ - T _ , T+], with suitable boundary conditions as follows (Beyn [6,7]). Suppose that A(ot) = f~-(Xe(~), or) has ns eigenvalues (counting multiplicities) with negative real part, nc eigenvalues with zero real part, and n, eigenvalues with positive real part, so that ns + nc + n, = n. In the hyperbolic case, nc = 0, while if the equilibrium x0 is a saddle-node, one has nc = 1.
180
W.-J. Beyn et al.
Note that (39) can be cast as
x(-T_)
E BU(xe(ot)),
x(T+) E BS(xe(Ol)).
Linearizing this condition about the equilibrium Xe(Ot), w e obtain the projection boundary conditions
Ls(ol)(x(-T_)
- Xe(Ot)) =0,
Lu(Ol)(x(T_I_ ) - Xe(Ol)) --0,
(41) (42)
which replace (39). Here Ls (or) is a ns x n matrix whose rows form a basis for the stable eigenspace of A*(ot). Accordingly, Lu(ot) is a n , x n matrix such that its rows form a basis for the unstable eigenspace of A*(ot). The boundary conditions (41) and (42) place the solution at the two end points in the center-unstable and center-stable eigenspaces of A (or), respectively. Finally, take the phase condition of the truncated problem to be
f T~(x(t) - Yc(t))*Yc'(t)dt = 0 .
(43)
It is not difficult to see that the truncated problem (38), (41)-(43) is a formally wellposed codimension-1 problem, when x0 is hyperbolic, since one has n boundary conditions (41) and (42) plus one integral constraint (43). More precisely, we have the following result. THEOREM 6.1 (Beyn [7], Schecter [72], Sandstede [70]). Let Xh(t) be a regular homoclinic orbit o f (38) to the equilibrium xo at ot = oto. Suppose 2 ( t ) is such that (40) is satisfied with x ( t ) = xh(t), where
f ~ x'h*(t)'2' (t) dt r O. oo
Then there exist constants p, C, T, > 0 such that, f o r any T_, T+ > T,, there exists a solution (2, 6t) to the truncated boundary-value problem (38), (41)-(43) that is unique in the ball
{(x,~) ~ C~([-T-, T+],R ") x R ~" IIx --xhlt-T_.T+]II~ + Iot--OtOI ~ T,, there exists a solution s to the truncated boundary-value problem (38), (41)-(43) with o~ - o~ofixed that is unique in the ball
{x ~ c~ (L-T_, T+], IRn)" IIx --xhl[-~,T§
~ P(T -~ +
T~)},
and satisfies the error estimate
I,
+
PROOF. The statements follow readily from the proofs of Schecter [72, Theorem 2.1 ] and Sandstede [70, Theorem 3.1 ], where non-central homoclinic orbits to saddle-node equilibria have been addressed. D In the case that the saddle-node homoclinic solution is continued in two parameters, we simultaneously need to compute the curve of saddle-node equilibria. This issue has been addressed in Section 5. For numerical experiments, we refer to Friedman [29] and Bai and Champneys [4].
6.2. Implementation details The above codimension-1 truncated boundary-value problems for regular homoclinic orbits or central saddle-node homoclinic orbits can be solved using standard boundary-value codes. For example, a particular implementation is available in AUTO (Doedel et al. [20]), using a suite of routines for homoclinic continuation called HOMCONT (Champneys et al. [12]). Here one can compute codimension-1 curves of homoclinic orbits with two free parameters, detect various codimension-2 points along such branches (see Section 8 below) and switch to continuation of higher codimension homoclinic bifurcations in three or more parameters. Some of the numerical issues involved in the continuation of solutions to such boundary-value problems include: efficient computation, ensuring smoothness with respect to or, of the boundary conditions (41), (42); the choice of T_ and T+; and the accurate determination of starting solutions for two-parameter continuation. The evaluation of (41), (42) requires a method for obtaining robust bases for the stable and unstable subspaces of A(a)*. A good choice is to use the Schur factorization of A*,
182
W.-J. Beyn et al.
as in Champneys et al. [ 12] and Doedel et al. [22]. In the latter reference, smoothness with respect to c~ has been achieved by adding the coefficients of this factorization, subject to various defining equations, to the list of unknowns to be solved for by the continuation algorithm. This is likely to lead to little extra computational work provided n 2 is small compared to the size of the linear systems to be solved by the BVP-solver. A simpler but less robust method is to perform the Schur decomposition exactly at each continuation step using blackbox linear algebra methods; see Champneys et al. [12]. An additional step is then made to normalize the stable and unstable subspaces in order to make them approximately smooth with respect to ot (Beyn [7, Appendix C]). The choice of T_ and T+ can be made adaptively during the continuation process using the error estimate (44) to achieve some desired tolerance, assuming the BVP to be solved exactly (Beyn [7, Section 4]). Starting points for homoclinic orbit continuation may be periodic solutions computed to large period (Doedel and Kern6vez [19]) or small amplitude solutions constructed near certain local codimension-2 bifurcations such as Bogdanov-Takens points (see Section 11.2.2). If neither of the above is available, a careful homotopy technique may be used to successively continue a small piece of the unstable manifold of x0 at a parameter value away from the true homoclinic orbit, into a full solution of the truncated boundary-value problem. An account of this latter method is beyond the scope of this Handbook, but the interested reader is referred to Doedel et al. [22] for the theory and Doedel et al. [21,23] for some applications.
7. Locating codimension-2 equilibrium bifurcations When investigating a two-parameter problem, one usually encounters higher-order degeneracies along codimension-1 bifurcation curves. Some of these degeneracies are determined by the Jacobian matrix, while others can only be detected taking into account nonlinear terms. For this reason we start this section with the nonlinear normal forms for codimension-1 equilibrium bifurcations, namely the fold and Hopf. Appropriate coefficients in these normal forms play the role of test functions for detecting codimension-2 bifurcations. Codimension-2 equilibrium bifurcations are important, as they serve as organizing centers, from which several curves of codimension-1 bifurcations can emanate. For example, the Bogdanov-Takens (BT) point, discussed in this section, gives rise to curves of Hopf points, folds, and homoclinic orbits. The switching to such codimension-1 curves from a codimension-2 point is discussed in Section 11.
7.1. N o r m a l f o r m s f o r c o d i m e n s i o n - 1 b i f u r c a t i o n s Suppose (1) has an equilibrium x = x0 at ot = or0, where ot e R. Let F ( x ) = f ( x , oto) represent the multivariate Taylor series F(x)
1
1
-- A ( x - xo) + -~ B ( x - xo, x - xo) + -~ C ( x - xo, x - xo, x - xo)
Numerical continuation, and computation of normal forms
183
1 + ~ D ( x - xo, x - xo, x - xo, x - xo) 1
-Jr-~
E(x-xo,
x-xo, x-xo, x-xo, x-xo)+O(llx-xoll6),
(45)
where A = f ox ,
B ( p , q) -- f ox x P q ,
C ( p , q, z) - f,,~
To analyze codimension-1 bifurcations we need to take into account the linear, quadratic, and cubic terms. We also introduce the following multilinear terms of order 4 and 5 here, as they will be needed in Section 10. D ( p , q, z, v)
-
-
f~)(4)pqzv,
E ( p , q, z, v, w) -- fA~
where p, q, z, v, w 6 R". The dependence of A, B, C, D and E on (x0, c~0) is not indicated to simplify notation. Assume further that x0 = 0, or0 = 0. If the solution x -- 0, ot -- 0 of (1) corresponds to a f o l d bifurcation, then the Jacobian matrix A has a simple zero eigenvalue )~l - 0 and no other critical eigenvalues. Let Aq =0,
A*p --0,
be the nullvectors, normalized according to (p,q) = (q,q)=
1.
LEMMA 7.1. The restriction o f (1) at ~ = 0 to the o n e - d i m e n s i o n a l center m a n i f o l d W c has the f o r m w ' - a w e + O( Iw 13),
w~R,
where the coefficient a can be c o m p u t e d by the f o r m u l a
l(p
a = -~
,
B(q q))= 1 , o , -~ P f ~ x q q .
(46)
If we have a simple fold with respect to the parameter ot then the restriction of (1) to the (parameter-dependent) center manifold is locally topologically equivalent to the normal form
W' = fl -+-aw 2, where/~ is the unfolding parameter. This normal form predicts the collision of two equilibria when the parameter/~ passes through zero. Note that the unfolding parameter/~ can be expressed in terms of the original parameter ot as
= (p, f (0, (see Section 10).
+
:)
184
W.-J. Beyn et al.
If the equilibrium x -- 0 of (1) has a H o p f bifurcation at ot = 0, then the Jacobian matrix A -- f~ (0, 0) has a simple pair of purely imaginary eigenvalues )~1,2 -- +i coo, coo > 0, and no other critical eigenvalues. Introduce two complex vectors Aq = icooq,
A* p -- -icoop,
and normalize them according to (p,q) = 1. LEMMA 7.2. The restriction of (1) at ot = 0 to the two-dimensional center manifold is locally smoothly orbitally equivalent to the complex normal form w' -- icoow -+-II wlwl 2 -+- O(Iwl4),
w 9 C 1,
where the normal form coefficient I i can be computed by the formula
11 =~1 Re(p, C(q . q ~ ) + .B(-~, (2icooln . - A) . - 1 B ( q . q)) - 2 B ( q A -I B(q -~))). (47) If the Hopf point is simple and its first Lyapunov coefficient 11 7~ 0, then the restriction of (1) to the (parameter-dependent) center manifold is locally topologically equivalent to the normal form w' -- (~ + icoo)w + It wlwl 2.
This normal form describes a bifurcation of a unique periodic solution branch from the equilibrium w = 0, when the parameter fl passes through the bifurcation value 13 = 0. The direction of the bifurcation is determined by the sign of l l. The unfolding parameter fl has the following asymptotic representation: 13 -- [Re(p, ii (0)q)]or + O(ot2), where, as in Definition 3.3, d
f~ ( Ol) -- - ~ f x (Xe(Of), Or),
and Xe(Ol ) is the continuation of the equilibrium for small Ic~l, Xe(O) -- O. The formulas (46) and (47) were derived using the center-manifold reduction and subsequent normalization on the center manifold in Kuznetsov [49]. Originally, an expression equivalent to (47) had been obtained by Lyapunov-Schmidt reduction and asymptotic expansions for the bifurcating periodic solution by Kopell and Howard in Marsden and McCracken [55] and by van Gils [76]. These formulas will be rederived in Section 10 below. The first algorithms to determine numerically the direction of Hopf bifurcation were developed by Hassard et al. [40] and implemented into the code B IFOR2.
Numerical continuation, and computation of normal forms
185
7.2. Locating codimension-2 bifurcations 7.2.1. Codimension-2 points on the fold curve. While tracking a fold curve one can encounter the following singularities. (1) An additional real eigenvalue )~2 meets the imaginary axis, with their geometric multiplicity remaining one, while the center manifold W c becomes two-dimensional: )~1,2 = 0 . These are the conditions for the Bogdanov-Takens (or double-zero) bifurcation. A test function to detect this bifurcation is given by OBT = r ' q ,
(48)
where
A q = A*r=O,
q*q = r * r = l.
Indeed, if grBT # 0, then the zero eigenvalue is simple. If the standard augmented system (29) or the modified minimally augmented system (23), (24) is used to compute the fold branch, then the normalized nullvector q is known from the continuation. The function (48) has a regular zero at a generic Bogdanov-Takens point. (2) Two extra non-real eigenvalues )~2,3 meet the imaginary axis, and W C becomes three-dimensional: )~1 = 0,
~2.3 = -+-i~o0,
for o)0 > 0. These conditions correspond to the fold-Hopfbifurcation, also known as the Gavrilov-Guckenheimer bifurcation. The Hopf-bifurcation test function ~H based on the bialternate product (see Equation (11)) can be used to detect this singularity. It is regular at a generic fold-Hopf point. However, 7rH will also vanish at Bogdanov-Takens points. (3) The eigenvalue )~l - 0 remains simple and the only one on the imaginary axis (dim W C = 1), but the normal form coefficient a in Equation (46) vanishes: )~l = 0 ,
a =0.
These are the conditions for a cusp bifurcation. One cannot detect this bifurcation by looking at eigenvalues of the equilibrium, because quadratic terms of f (x, 0) are needed to compute a. The coefficient a can be used as a test function to detect this bifurcation: ~cp = a .
(49)
Again, if the standard or the modified minimally augmented system is used to compute the fold branch, the nullvector q is known from the continuation. The function (49) has a regular zero at a generic cusp point.
186
W.-J. Beyn et al.
7.2.2. Codimension-2 points on the H o p f curve. While following a Hopf bifurcation curve for Equation (1), one can encounter the following new singular points: (4) Two extra non-real eigenvalues )~3,4 m e e t the imaginary axis and W c becomes fourdimensional: XI,2 - -4-icol,
X3,4 - - -4-ico2,
with o91,2 > 0. These conditions define the two-pair or double-Hopfbifurcation. This bifurcation is most easily detectable if the double-bordered bialternate-product system (28) is used for the Hopf continuation. At this bifurcation, 2A (3 In has rank defect 2, so that all elements of the matrix G vanish. For example, the test function ~ D H = g22
will have a regular zero at a generic double-Hopf point. (5) Finally, the first Lyapunov coefficient l l (Equation (47)) may vanish, while X 1.2 = +ico0 remain simple and therefore dim W e = 2: )~1,2 ~-~ +ioa0,
11 = 0.
At this point, a "soft" Hopf bifurcation turns into a "hard" one (or vice versa). It is often called a generalized Hopfbifurcation (or Bautin bifurcation). The test function is given by lpG H "-- ll.
The Bogdanov-Takens bifurcation can also be located along a Hopf bifurcation curve defined by the augmented system (32) (or (33)) as x passes zero. At this point, two purely imaginary eigenvalues collide and we have a double zero eigenvalue. Following the curve further, we will continue a neutral saddle equilibrium with real eigenvalues X l = -X2. The value of tc can be calculated if the defining system (27) (or (28)) is used to continue the Hopf curve. One has in that case (v*Av)(w*Aw) - (w*Av)(v*Aw) K
-(V*V)(W*tO)
--
(V'W) 2
where v, w 6 ~;~n are two real vectors such that Q = v A w, where A denotes the wedge product, and Q is a right nullvector of 2A (3 In. We recall that the wedge product v A w of two vectors in R n is a vector in R n(n-l~/2 indexed by pairs (i, j ) where 1 ~< j < i ~< n such that (v A w ) ( i , j ) = l ) j w i -- l ) i w j . In the present case v, and w span the two-dimensional eigenspace that corresponds to the pair of eigenvalues with zero sum. This is an invariant subspace of A. An easy computation shows that ~ 2 ( = / r is the product of the two zerosum eigenvalues. A fold-Hopf bifurcation can also occur while tracing a Hopf bifurcation curve. In this case it can be detected as a regular zero of Of = det A.
Numerical continuation, and computation of normal forms
187
REMARK. In order to be able to use the above test functions to detect codimension-2 points, the underlying defining systems for the codimension-1 bifurcations must remain regular at the codimension-2 points. Otherwise, the continuation algorithms may not be able to pass such a point. The following two lemmas provide necessary information. LEMMA 7.3. If (x, c~) is a point corresponding to any generic codimension-2 equilibrium bifurcation of (1), except the double-Hopf singularity, then rank J = n § 1, where J is the Jacobian matrix of the corresponding minimally augmented system (21) or (22). A generic double-Hopf point is a simple branch point for (22). LEMMA 7.4. The Jacobian matrix of the augmented system (29) has rank 2n + 1 at generic Bogdanov-Takens and cusp bifurcation points of (1), while the Jacobian matrix of the augmented system (30) has rank 3n + 2 at generic Bautin, fold-Hopf and doubleHopf bifurcation points of (1). The first interactive software to detect all codimension-2 points was LOCBIF (Khibnik [45], Khibnik et al. [46]). Detection of all codimension-2 points as described above is implemented in CONTENT (Kuznetsov and Levitin [52]).
8. Locating codimension-2 homoclinic bifurcations In Section 6 we considered numerical methods for the two-parameter continuation of homoclinic orbits to equilibria. Suppose that we continue a branch of regular codimension-1 homoclinic orbits to (1) in two parameters, i.e., ot E R 2, so that a homoclinic loop to the equilibrium xe(s) exist whenever ot = or(s) with s 6 ~1; see Section 2.2 and Section 6. Here the one-dimensional parameter s is typically Keller's pseudo-arclength. We refer to these homoclinic solutions as the primary homoclinic orbits. Along this primary branch, codimension-2 homoclinic bifurcation points may arise. Such bifurcations may, for instance, lead to more complicated homoclinic connections such as so-called n-homoclinic orbits which follow the primary homoclinic loop n times. Another possibility is that the stability of the periodic solutions which accompany the primary homoclinic orbit changes. The issue addressed in this section is the detection of such codimension-2 homoclinic bifurcation points. We shall focus only on those known codimension-2 bifurcations that, at the critical parameter value, involve a unique finite-amplitude homoclinic orbit. Also, we confine ourselves to numerics. Details of the dynamics near each codimension-2 point are given elsewhere in the Handbook; see also the review papers: Fiedler [28], Champneys and Kuznetsov [ 11 ]. Codimension-2 homoclinic bifurcation points are detected along the primary branch ot = or(s) by locating zeroes of certain test functions; see Section 3 for the concept of test functions. The issue of defining these test functions is actually two-fold. First, consider the primary codimension-1 homoclinic orbits to the original problem (38)-(40) on the infinite time interval. A test function for a certain codimension-2 homoclinic bifurcation is a smooth function defined along the primary branch such that its regular zeroes correspond to the occurrence of the bifurcation. Afterwards, we need to define test functions for the
188
W.-J. Beyn et al.
truncated boundary-value problem (38), (41)-(43) on the finite time interval ( - T _ , T+). We require that each such test function is a smooth function along the branch of primary homoclinic orbits to the truncated problem such that the limit of the test function exists as T_, T+ --+ oo, and is equal to the test function of the original problem on the infinite time interval. We call such test functions well-defined. In the simplest cases, test functions are computable via eigenvalues of the equilibrium. In other cases, the homoclinic solution at the endpoints or solutions to the adjoint variational equation with appropriate boundary conditions are utilized. We address these two different types of test functions in the following two sections. Test functions along branches of central saddle-node homoclinic orbits are considered in the last section. The stable and unstable eigenvalues of A - f x ( X e ( S ) , a ( s ) ) are denoted by ~.~, i -ll 1 . . . . . ns, and )~i, i = 1. . . . . nu. In addition, if a branch of central saddle-node homoclinic orbits is computed, we have nc = 1, i.e., there is a simple eigenvalue ,kC1 -- 0 at zero. We assume that the eigenvalues are ordered so that Rel1.,s } ~N".
(72)
The restricted equation can be written as w' = G(w),
G : R"~ -+ R ''c.
(73)
Substitution of (72) and (73) into (71) gives the following homological equation: Hw(w)G(w)-
(74)
F(H(w)).
We expand the functions G, H in (74) into multivariate Taylor series, 1
Ivl~l
1
Ivl~l
and assume that the restricted equation (73) is put into the normal form up to a certain order. The coefficients gv of the normal form (73) and the coefficients hv of the Taylor
W.-J. Beyn et al.
204
expansion for H(w) are unknown, but can be found from (74) by a recursive procedure, from lower to higher order terms. (Obviously, one has Y~'~lvl=lhvwV ~ Tc') Collecting the coefficients of the wV-terms in (74) gives a linear system for the coefficient hv
Lhv=Rv.
(75)
Here the matrix L is determined by the Jacobian matrix A and its critical eigenvalues. The right-hand side Rv depends on the coefficients of G and H of order less than or equal to Ivl as well as on the terms of order less than or equal to Ivl of the Taylor expansion (45) of F. When Rv involves only known quantities, the system (75) has a solution because either L is nonsingular or Rv satisfies Fredholm's solvability condition (p, Rv) = 0 , where p is a nullvector of the adjoint matrix L*, and (p, q) = p*q. When Rv depends on the unknown coefficient g, of the normal form, L is singular and the above solvability condition gives the expression for gv. For all codimension-2 bifurcations, except Bogdanov-Takens, the invariant subspace of L(L*) corresponding to the zero eigenvalue is one-dimensional in C n, i.e., there are unique (up to scaling) nullvectors q and p,
Lq=O,
L'p=0,
(p,q}=l,
and no generalized nullvectors. Then the unique solution h v to (75) satisfying (p, h v) = 0 can be obtained by solving the following nonsingular (n + 1)-dimensional bordered system:
("o)
L p*
We write h v = LINV Rv. The Taylor expansion of H (w) simultaneously defines the expansions of the center manifold, the normalizing transformation on it, and the normal form itself. Since we know a priori which terms are present in the normal form, the described procedure is a powerful tool to compute the normal form coefficients at the bifurcation parameter values. In the following sections, we summarize results obtained by this method with the help of the symbolic computation software MAPLE. Details can be found in Kuznetsov [50].
10.3. The cusp bifurcation At such a bifurcation point, the system (1) has an equilibrium with a simple zero eigenvalue )~1 -- 0 and no other critical eigenvalues. Let q, p 6 R" satisfy
Aq = 0 ,
A*p = 0 ,
(p,q} = 1.
Numerical continuation, and computation of normalforms
205
The restriction of (1) to the corresponding center manifold has the form t O ' - - a w 2 if- b to 3 -+- O ( w 4 ) ,
with unknown coefficients a and b. Applying the normalization technique described above, one gets an~
l (p , B(q , q)},
which already appears in (46) for the fold bifurcation. For the coefficient b we obtain
b--~l(p . C(q. q. q)+ . 3B(q . h2)) where h2 = -AINV[B(q, q) - (p, B(q, q))q], which can be computed by solving the nonsingular (n + 1)-dimensional bordered system A p*
qo)(h2)_(-B(q'q)q-(P'B(q'q)) s 0
q)
"
Recall that a = 0 at the cusp bifurcation. Thus the coefficient b in the normal form (62) can be expressed more compactly as
1 C(q, q, q) - 3B(q, b - -~(p, 10.4.
A INV B(q,
q))).
Bogdanov-Takens bifurcation
Here the equilibrium of system (1) has a double zero eigenvalue )~1.2 = 0, and there exist two real, linearly independent, (generalized) eigenvectors, q0, q l 6 R", such that
Aqo = 0 ,
Aql = q o .
Moreover, there exist corresponding vectors Po, Pg 6 R n of the transposed matrix A*: A*pl = 0,
A ' p 0 = Pl.
One can choose these vectors so that they satisfy (q0, p0) = (ql, pl) = 1,
(ql, p0) = (q0, pl) = 0.
Then one obtains
1 a -- ~(p,, B(qo, qo)) and
b-{p0
, B(qo, qo))+ (Pl, B(qo, ql)),
for the coefficients a, b of the normal form (63).
206
W.-J. Beyn et al.
10.5. Bautin (generalized Hopf) bifurcation At such a bifurcation point the system (1) has an equilibrium with a simple pair of purely imaginary eigenvalues, k 1,2 - - -+-i O)0, COO > 0, and no other critical eigenvalues. As in the simple Hopf case, we introduce two complex eigenvectors q, p 6 C nA q - i cooq ,
A *p -- - i coop ,
and normalize them according to (p,q) = p ' q - - 1.
The normalized restriction of (1) to the two-dimensional center manifold can be written as 1 G32wlw 14 + O( Iw 16), w , -- icoow + ~1 G21wlwl 2 + -~ where Gjk E C I. An application of the normal form algorithm gives the cubic normal form coefficient G21 - - ( p , C ( q , q,-q) + B(-~, (2icOoIn -
A) -1B(q, q)) - 2B(q, A -1B(q,-~))), (76)
while I I - - 1 Re G21 is given by (47). The second Lyapunov coefficient is given by
1
12 -- ~ Re G32, with G32 - (p, E(q, q, q, q, q ) + D(q, q, q, h 2 0 ) + 3D(q,-~,-q, h20) m
+ 6D(q, q,-~, hll) + C(-~,-~, h3o) + 3C(q, q, hzl) + 6C(q,-~, hzl) + 3C(q, hzo, h2o) + 6 C ( q , h l l , h l l ) +6C(-q, hzo, hll) + 2B(q-, h31) m
+ 3B(q, h22) + B(hzo, h3o) + 3B(hzl,h2o) + 6 B ( h l l , h 2 1 ) ) ,
where h20 = (2icooln - A) -1B(q, q), hll -- - A - 1 B ( q , - 4 ) .
The complex vector h21 is found by solving the nonsingular (n + 1)-dimensional complex system iwoIn - A p*
0
s
=
0
'
Numerical continuation, and computation of normal forms
207
while h3o - (3icooi,, - A) -l [C(q, q, q) + 3B(q, h20)], h31 -- (2icooln - A ) - l [ D ( q , q , q , - q ) + 3 C ( q , q , h l l ) + 3C(q,-q, h20)
+ 3B(h2o, hll) + B(q-, h3o) + 3B(q,h21) - 3G21h2o], h22 -- - A - I [ D ( q , q, q, q ) + 4C(q,-~, hll) + C(-~,-~, h2o) + C(q, q, h20)
+ 2 B ( h l l , h l t ) + 2B(q, h21) + 2B(q-, h21) + B(h20, h20) - 2hll(G21 +G21)].
10.6. Fold-Hopf bifurcation At a fold-Hopf bifurcation point of (1) the Jacobian matrix A -- fx (0, 0) has a simple zero eigenvalue ,kl -- 0 and a pair of purely imaginary simple eigenvalues: X1 -- 0,
~k2.3 -- -+-icoo,
with wo > 0, and no other critical eigenvalues. Introduce two eigenvectors, qo 6 R" and ql E C n,
Aqo - 0,
Aql -- icooql ,
and two adjoint eigenvectors, Po 6 R 'z and pl E C '7, with A*po -- 0,
A'p1 -- -icoopl.
Normalize these vectors such that (po, qo) -
(pl,qt)
- - 1.
The following orthogonality properties hold" (pl, qo) -- (po, ql) - 0. One obtains the following expressions for the quadratic coefficients in (66)" G2oo - ( p o , B(qo, qo)),
Gl 1o - - ( P l , B(qo, ql)),
G o l l - - ( p o , B(ql,-ql)), and the following formulas for the cubic coefficients in (66): G3oo - ( p o , C(qo, qo, qo) + 3B(qo, h2oo)),
Glll --(PO, C(qo, qt,-ql) + B(qo, holl) + B(ql, hllO) + B ( q l , hi 1o)), G21o--(pl, C(qo, qo, ql) + 2B(qo, hllo) + B(ql,h2oo)), Go21 --(Pl, C(ql,ql,-ql) + 2B(ql,holl) + B(-qi,ho2o)),
208
W.-J. Beyn et al.
where h2oo = - A I N V [ B ( q o , qo) - ( P o , B(qo, qo))qo], h020 = (2icooIn - A) - | B(q|, ql), hll0 -- (icoOIn -- A)INV[B(qo, ql) - ( P l , B(qo, ql))ql], h01l -- - a INV [B(ql,-ql) - (PO, B(ql, q-l))q0]. Here the vectors h200 and h01| can be computed by solving the nonsingular (n + 1)dimensional real systems A
Po
s
0
s ) (
0
and
(Ao.
while the vector h 110 can be found by solving the nonsingular (n + 1)-dimensional complex system
icooln -- A
q.) 0)(.+q..+.+oq.>q.) 0
s
=
0
"
10.7. Double-Hopf bifurcation At the double-Hopf bifurcation the system (1) has an equilibrium for which the Jacob|an matrix A -- fr (0, 0) has two pairs of purely imaginary simple eigenvalues" )~1,4 = -+-|col,
)~2,3 = -+-|co2,
with col > 0)2 > 0, and no other critical eigenvalues. Assume that condition (68) holds. Since the eigenvalues are simple, there are two complex eigenvectors, ql, q2 E C n, corresponding to these eigenvalues"
Aql -- icolql,
Aq2 -- ico2q2.
Introduce the adjoint eigenvectors pl, P2 E C n by
A* pi = -|col Pl ,
A ' p 2 -- -ico2P2.
These eigenvectors can be normalized using the standard scalar product in C n, (pl, ql) -- (p2, q2) -- 1.
Numerical continuation, and computation of normal forms
209
The resonant cubic coefficients in the normal form (69) are given by G2100 - (pl, C ( q l , q i , - q l ) + B(h2000, q-l) + 2B(hlloo, ql)), GI011 - - ( p l , C(ql, q2,-q2) + B(h 1010, q-2) -+- B(hlool, q2) -+- B(hool 1, ql)), G i l l 0 - - (P2, C ( q l , - q l , q 2 ) + B(hlloo, q2) + B(hlolo, q-l) + B(h-lool, ql)), Go02! --(P2, C(q2, q2, q-2) + B(ho020, q-2) + 2B(hool l, q2)), where hi loo -- - - A - l B(ql, -ql), h2000
--
(2icol L,
-
A) -1B(ql,
h 1010 - - [i (c01 + co2)In
--
ql),
A] - 1 B ( q l , q2),
hl001 -- [/(col - co2)I,, - A] - 1 B ( q l , q2), hoo2o = (2ico2l, - A) - l B(q2, q2), hool l -- - A -1B(q2,-q2)" All matrices involved in the above formulas are nonsingular, due to the conditions (68) on the critical eigenvalues. Expressions for the fifth-order coefficients in (69) are given in (Kuznetsov [50]).
11. B r a n c h s w i t c h i n g a t c o d i m e n s i o n - 2
bifurcations
Suppose that the system (1) has a codimension-2 equilibrium x --- 0 at ot = 0. Generically, one expects curves of codimension- 1 bifurcations to emerge from the origin in the a-plane. In this section we describe methods to start the continuation of such curves based on the information available at the singularity. As we mentioned in Section 10, there are not only codimension-1 equilibria that emanate from codimension-2 points but, depending on the type, there may also be codimension-1 families of periodic and homoclinic orbits. The analogous problem of switching from codimension- 1 bifurcations to codimension-0 equilibria or periodic solutions was treated in Section 4. Here we will not consider switching between bifurcations of the same codimension, which is typical for nongeneric parameter situations (e.g., in systems with symmetries). One way to set up a computational procedure is to consider the normal form of the codimension-2 singularity including the parameters/3 E R 2 w' - G(w, fl),
G" R no+2 --+ R n'.
(77)
For all five codimension-2 bifurcations these normal forms are listed in Section 10. Suppose that an exact or approximate formula is available that gives the emanating codimension-1 bifurcations for the normal form (77). In order to transfer this to the original equation (1) we need a relation a -- K (fl) ,
K" IR2 -+ ]R2
(78)
210
W.-J. Beyn et al.
between the unfolding parameters/3 and the given parameters c~ and, moreover, we need to extend the center manifold parametrization (72) with respect to 13 x = H(w, fl),
H:IR n~+2 ---+IR".
(79)
Taking (78) and (79) together as (x, or) = (H(w, fl), K(fl)) yields the center manifold for the suspended system x' = f (x, c~), or' = 0. The homological equation (74) now turns into
(80)
Hw(w, fl)O(w, fl) -- f (H(w, fl), K(fl))
and the method of Section 10.2 extends readily to this case. We assume the Taylor series of G to be known as 1
G(w, fl) -
v!#v
wV
flu,
Ivl+lul~>l and the Taylor series of H and K to be unknown
H(w, ~) --
y~
1 hvuw vfl/~, v!#!
Ivl+l~l~>l
1
;5 lul~l
t~ ~
We insert these expansions into Equation (80) and apply a recursive procedure as in Section 10.2. For # = 0 this reproduces the coefficients from Section 10 while the coefficients with [/z[ ~> 1 yield the necessary data on the parameter dependence. Again, as in Section 10, we emphasize that this approach requires the knowledge of the normal form (77) and derives necessary conditions for the transformations. We also notice that the Taylor terms are not always determined uniquely in this way and that the number of terms needed depends on the type of codimension-1 singularity we want to follow. For example, folds and Hopf points usually need fewer Taylor terms than periodic and homoclinic orbits. In the following sections we give some results for the cusp, Bogdanov-Takens, and Bautin bifurcations and comment on the remaining cases.
11.1. Switching at a cusp point The cusp is the simplest case for branch switching because there is a smooth and regular curve of folds passing through it, and no other codimension-1 points are nearby. To be more specific, suppose that a cusp of (1) has been located at some (x0, or0) by solving the augmented system which consists of (2) and (59). The tangent vector to the curve of folds passing through it is then given by (q, 0, 0) where fOq = 0. Note that according to (26) we have gx (xo, c~o)q = - p* fxx (xo, oeo)qq = 0
Numerical continuation, and computation of normal forms
211
and hence (q, 0, 0) spans the null space of the Jacobian of (f, g). We may then continue the fold branch with the predictor (xo, do) + s(q, O, O)
for some small s r O.
To obtain more information on the location of the fold curve in the parameter plane we use the normal form
G ( w , fl )
= fl l -+- f1211o + c w 3 - + - . . . .
For simplicity, let x0 = 0, o~0 = 0 and consider the expansions K(r
gl/~ -4-0(11r
1
1
H(w, fi) -- Holfl + qw + -~ H20w 2 + H, lwfl + -6 H30w 3 +
1
2
o(11/~11 + w4),
1
f (x, or) - a x + alo~ + -~ B(x, x) + B1 (x, or) + -~ C(x, x, x) + O(llc~ II2 + Ilx 114). Using the method described above one finds as in Section 10.3 that H20 = - A I N V B ( q , q ) ,
C ~
l p*(3B(H2o , q ) + C ( q
,
q , q))
and Hol, Hi l, H20, H30, Kl are in addition determined through the following bordered systems
( A
p*Bq p*
A1 )(O01)_ (~ 0)l
p*Blq 0
Kl
Hll -- A INv ([H20,q] -
0
B(q,
0
H01)-- B1(q, K1)),
/-/3o -- A INv (6cq - 3B(H2o, q) - C(q, q, q)). It turns out that the first bordered system is nonsingular for generic cusps and can be reduced to one left and two right solves with AINV and to a small 2 x 2 system. Since the curve of folds for the truncated normal form is given by 112=/3,
fll = 2ce 3,
f12 = - 3 c s 2
we obtain an O(6 4) approximation of the fold curve in the original system as follows 2
._
(..o1 ( o ) 2
1 H2o) 1
W.-J. Beyn et al.
212
11.2. Switching at a Bogdanov-Takens point 11.2.1. Switching to folds and Hopfpoints. According to Section 7.2, any generic BTpoint (x0, c~0) in a two-parameter system is a regular solution of the minimally augmented fold equations f = 0, gF = 0 (see (23), (24)) as well as of the corresponding Hopf equations f = 0, gH = 0 (see (23), (27)). In this sense there is no problem of starting either of the two branches by solving the appropriate system. However, if one replaces the large system (27) by the Hopf system (30), then the BTpoint becomes a simple (actually symmetry-breaking) branch point for (30) and the branch switching methods of Section 4 apply, cf. Spence et al. [74]. Starting Hopf curves at BTpoints was suggested by Roose [65] and the use of bordered systems in Griewank and Reddien [36]. We provide here some higher-order approximation for the functions in (78), (79) which will be used in the next subsection for the fold and Hopf branches as well as for the homoclinic branch. Let x = 0, ot = 0 be a BT-point; then choose vectors q0, ql, p0, pl and compute the coefficients a, b in the normal form
G(w, fl) --
(Wl
)
/31 § fl2tO0 § aw 2 + b w o w l §
'
as in Section 10.4. We use the homological equation (80) with the expansions 1
K ( / 3 ) - K1/3 § ~K2/3 2 + 0 ( / 3 2 § 1/3t/321 § 1/3213), H(w,
fl) --
1
1
H01/~ § [qo, ql]W + -~ H20,OW2 4- H20, lWOWl 4- -~ Ho2,1fl 2 + O(w 2 + Iwow~l + Iwol3 §
§ I/~0r I + 1/3213),
1
1
f (x, ~ ) - Ax + Alc~ + -~ B ( x , x ) + B l ( x , ~ ) + -~ B2c~2 + O(llxll 3 + Ilotl13). (81) The linear terms K l, H01 are easily determined through
KI--(Y?+Y2)-I(Yly2-Y2),yl
where (Yl, Y2) - Pl A l,
H01 - - A INv ([ql, 0] - A ! K1).
(82)
[A Pl Here we have defined A INV by solving the bordered nonsingular matrix ~,q~ 0) as in Sec-
tion 10.2. Note that Pl*([ql, 0] - A I K 1 ) - - ( 1 , 0) - (p~A1)Kl = O. This equation does not define K1 uniquely and the above choice of Kl was made for convenience.
Numerical continuation, and computation of normal forms
213
Letus introduce columns in K1 -- [KI,0, Kl,l] and in H01 = [H01.0, H01, l], respectively. Then the fold curve for the normal form ll) 0 = / 3 ,
1101 "~ 0 ,
f l l --- a /3 2 ,
132 --- - - 2 a / 3
transforms into ot -- -2a/3 KI. 1 + O(/32),
x --/3(q0 -- 2all01,1) + 0(/32)
and the Hopf curve w0 = wl = 0, fll = 0, f12 = --/3 < 0 into -
x = --/3Hol.1 with/3 > 0.
+
With AINV as defined above, one finds for the quadratic terms H20,0 -- A INV (2aql - B(qo, qo)), -
-(pTz)K,
o,
H20,1 = AINV(bql + H 2 0 , 0 -
B(qo, ql)),
H02,1 =--AINV(z -+- A1K2),
(83)
where
z = B(HoI,1, Hol,l) -+- 2Bl (H01,1, Kl.l) -+- B2(Kl,1, Kl,1). Using the expressions for a and b it is easily verified that the right-hand sides in the first two equations are in the range of A. With the formulae above and (81) one can write down an 0(/3 3) approximation of the fold and the Hopf curve. 11.2.2. Switching to homoclinic orbits. The key to the construction of the homoclinic orbits in the normal-form system is a blowup transformation which anticipates the cuspoidal shape of the phase curves in the (wo, Wl)-plane. Introduce new parameters r,/3 and phase variables ~, r/via
f12 -- Z'62,
1
fll -- ~aa (T2 -- 1)/34 , /33
(t)
-
Ua
,
/3 t) .
This transforms w' = G (w, fl) into ~' /7'
r/ ~2 _ 4
+ ~a
0 b~r/- 2br
~).
At e = 0 this system is Hamiltonian and has a homoclinic orbit given explicitly by (~0, r/0) (t) -- 2(1 - 3 sech 2 (t), 6 sech 2 (t) tanh(t)).
(84)
214
W.-J. Beyn et al.
One can now apply well-known techniques due to Pontryagin [61] and Melnikov [57] to obtain periodic and homoclinic orbits for the perturbed Hamiltonian system. Alternatively, according to Hale [38], one may treat this problem as a bifurcation problem in suitable function spaces. For this purpose take r as a parameter and write (84) as an operator equation
F(z, r) -- O,
where
1 Z -- (~,/7, 8) 9 Cbounde d X ]l~1 .
Setting z0 = (~0, r/0, 0) we have F (z0, r) = 0 for all r 9 ]1~ 1 and a computation shows that a simple (in fact, a pitchfork) branch point occurs at r0 - - 5 . This proves the existence of a branch of nontrivial homoclinic orbits for the system (84) and leads to a first order approximation of the bifurcating branch as z = (~0, 00, s),
r = r0.
For the normal form system we obtain an approximate homoclinic at
fll --
6 64 _[_0(66)
- 49----a
82((2) Wo(t)-- ~aa ~0
'
f12 --
5 82 + 0@4)
7
10) t -t--- -t-0(83),
'
83 ( 8 ) Wl(t)-- 8aa 170 2t
-F0(84).
Finally, with the data collected in (82), (83) and using (78), (79), (81) we arrive at a homoclinic predictor for the original system or----if5 e2K,, 1 + ~
+ 0(8 6)
--6Kl,o + -~- K2
--ffHol,l+~a a
~o
t
lO
))
+--7-+O(8)qo
+~aar/O
~t
ql
--FO(64). This predictor can also be used to set up a phase fixing condition and thus start the continuation of a branch of codimension-1 homoclinics with the methods from Section 6. Starting homoclinic orbits at Bogdanov-Takens bifurcations was first considered in Rodr/guez-Luis et al. [64] and Beyn [9].
11.3. Switching at Bautin (generalized Hopf) bifurcation Since for this bifurcation there exists a continuation of the critical equilibrium xo(a) for all sufficiently small I1~ II, with x0(0) = 0, we can write (1) in a coordinate system with the origin at x0(ot) as
x' = A(ot)x + F(x, or),
F :N n+2 --+ R n,
Numerical continuation, and computation of normal forms
215
where F = O(llx 112). This allows one to avoid expanding the center manifold and the normal form into Taylor series in the parameters. We have 1
1
F(x, or) -- -~ B(x, x, or) -t- -~ C(x, x, x, or) + O(llx 114), 1
1
H(w,-~,ot) -- wq(a) + ~ ( o t ) + ~h20(ot)w 2 -F-h,,(a)w-~ + ~h02(c~)w 2
(85)
+ O(Iw13), and w' -- )~(c~)w + cl (ot)wlwl 2 + c2(ol)wlwl 4 -~- O(Iw16), where )~(ot) = #(or) + / c o ( a ) , #(0) = 0, co(0) = coo > 0,
A(ot)q(c~) = X(ot)q (or),
A* (ot)p(ot) = ~.(c~)p(ot),
and p, q are normalized in the standard way for all IlotII small. From the homological equation (80) we now get 1
c, (or) -- -~{p(ot)C(q(ot), q(a), ~(a), a) + B(~(c~), h2o(a), (~) + 2B(q(ot),h,,(ot),ot)), where h2o(u) -- [2)~(u)I,, - A ( u ) ] - ' B(q(ot), q(ot), or), h,, (or) -- [(k(ot) q- k(ot)) In -- A(c~)] -I B(q(ot),-~(ot), or). Note that cl (or) is not uniquely defined and the above choice gives a C1 (0) that coincides with (76) from Section 10.5. To arrive at the normal form with real coefficients of the nonlinear terms
w' -- (#(o~) + ico(ot))w + ll (oe)wlwl 2 -I- 12(ot)wlwl 4 + O(Iwl6),
(86)
one has to reparametrize time (Kuznetsov [49]) according to
dt-
1-
Imcl (Or) 2 3) co(a) Iwl +O(Iwl ) dr,
which gives 11(or)= Recl(ot) -
~o(~)
Imcl (or).
(87)
216
W.-J. Beyn et al.
The unfolding parameters of the normal form (65) can then be expressed as ill -- #(Or), f12 -- 11 (0/),
(88)
where 11 (or) is defined by (87). Equations (88) can be written as fl = K I ~ "1- 0(11c~112),
ce, r ~ R 2,
where K1 is the 2 x 2 Jacobian matrix of (88) that is nonsingular at a generic Bautin point. Thus, o t - g l l / 3 --t-0(11/3112). This allows relating the equation for the curve of fold periodic solutions in the truncated normal form (86), namely
Iwl : ~ ,
~ =12e 4,
f12 : --21262,
to the original parameters. We also obtain an asymptotic estimate for the periodic solution using (85). Recall that an expression for 12(0) is given in Section 10.5. Relating the Hopf curve in the truncated normal form with that in the original system is easy, since it is defined by fll = 0, f12 : 6, w -- 0.
11.4. Other codimension-2 cases A more delicate situation appears at a fold-Hopf bifurcation point (Section 10 and [49]). Assuming an approximate normal form as in Section 10.1, asymptotic formulae for a curve of Shilnikov homoclinic orbits and for a curve of torus bifurcations have been derived in Gaspard [31 ] and applied to a specific example, the R6ssler model. Note that the Shilnikov orbits appear in an exponentially narrow wedge in the parameter plane and their precise form depends on the higher-order terms of the approximate normal form. In addition there may be curves of heteroclinic tangencies of periodic solutions and torus bifurcations. Similar phenomena arise at double-Hopf bifurcations (cf. [49]). A complete set of formulae suitable for switching to homoclinic and heteroclinic orbits in the fold-Hopf and the double-Hopf case seems not to be available.
References
[1] E.L. Allgower and K. Georg, Numerical path following, Handbook of Numerical Analysis, Vol. 5, EG. Ciarlet and J.L. Lions, eds, North-Holland, Amsterdam (1996). [2] U.M. Ascher and R.J. Spiteri, Collocation software for boundary value differential-algebraic equations, SIAM J. Sci. Comput. 15 (1995), 938-952.
Numerical continuation, and computation of normal forms
217
[3] U.M. Ascher, J. Christiansen and R.D. Russell, A collocation solver for mixed order systems of boundary value problems, Math. Comp. 33 (1979), 659-679. [4] E Bai and A.R. Champneys, Numerical detection and continuation of saddle-node homoclinic bifurcations ofcodimension one and two, Dynam. Stability Systems 11 (1996), 325-346. [5] Z. Bashir-Ali, Numerical solution of parameter dependent two-point boundary value problems using deferred correction, Ph.D. thesis, Department of Mathematics, Imperial College, London (1998). [6] W.-J. Beyn, Global bifurcations and their numerical computation, Continuation and Bifurcations: Numerical Techniques and Applications, D. Roose, A. Spence and B. De Dier, eds, Kluwer, Dordrecht (1990), 169-181. [7] W.-J. Beyn, The numerical computation of connecting orbits in dynamical systems, IMA J. Numer. Anal. 10 (1990), 379-405. [8] W.-J. Beyn, Numerical methods for dynamical systems, Nonlinear Partial Differential Equations and Dynamical Systems, W. Light, ed., Advances in Numerical Analysis, Vol. I, Oxford Univ. Press, Oxford (1991), 175-236. [9] W.-J. Beyn, Numerical analysis of homoclinic orbits emanating from a Takens-Bogdanov point, IMA J. Numer. Anal. 14 (1994), 381-410. [ 10] R.M. Borisyuk, Stationary solutions of a system of ordinary differential equations depending upon a parameter, FORTRAN Software Series, Vol. 6, Research Computing Centre, USSR Academy of Sciences, Pushchino ( 1981) (in Russian). [11] A.R. Champneys and Y.A. Kuznetsov, Numerical detection and continuation of codimension-two homoclinic bifurcations, Internat. J. Bifur. Chaos Appl. Sci. Engrg. 4 (1994), 795-822. [12] A.R. Champneys, Y.A. Kuznetsov and B. Sandstede, A numerical toolbox for homoclinic bifurcation analysis, Internat. J. Bifur. Chaos Appl. Sci. Engrg. 6 (1996), 867-887. [13] P.H. Coullet and E.A. Spiegel, Amplitude equations for systems with competing instabilities, SIAM J. Appl. Math. 43 (1983), 776-821. [14] C. de Boor and B. Swartz, Collocation at Gaussian points, SIAM J. Numer. Anal. 10 (1973), 582-606. [ 15] B. Deng, Homoclinic bifurcations with nonhyperbolic equilibria, SIAM J. Math. Anal. 21 (1990), 693-720. [16] E Deuflhard, B. Fiedler and P. Kunkel, Efficient numerical pathfollowing beyond critical points, SIAM J. Numer. Anal. 24 (1987), 912-927. [ 17] E.J. Doedel, AUTO, a program for the automatic bifurcation analysis of autonomous systems, Congr. Numer. 30 ( 1981), 265-384. [18] E.J. Doedel, Numerical analysis of bifurcation problems, Technical report, Hamburg-Harburg Summer Schools, 1997 and 1999 (ftp.cs.concordia.ca, pub/doedel/doc/hamburg.ps.Z) (1999). [19] E.J. Doedel and J.-E Kern6vez, AUTO: Software for continuation problems in ordinary differential equations with applications, California Institute of Technology, Applied Mathematics (1986). [20] E.J. Doedel, A.R. Champneys, T.E Fairgrieve, Y.A. Kuznetsov, B. Sandstede and X.-J. Wang, AUTO97: Continuation and bifurcation software for ordinary differential equations (with HomCont), Computer Science, Concordia University, Montreal, Canada (1997), ftp.cs.concordia.ca/pub/doedel/auto. [21] E.J. Doedel, M.J. Friedman and J. Guckenheimer, On computing connecting orbits in the sine-Gordon and Hodgkin-Huxley equations, IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences E77-A (11) (1994), 1801-1805. [22] E.J. Doedel, M.J. Friedman and B.I. Kunin, Successive continuation for locating connecting orbits, Numer. Algorithms 14 (1997), 103-124. [23] E.J. Doedel, M.J. Friedman and A.C. Monteiro, On locating connecting orbits, Appl. Math. Comput. 65 (1994), 231-239. [24] E.J. Doedel, H.B. Keller and J.-P. Kern6vez, Numerical analysis and control of bifurcation problems: (I) Bifurcation in finite dimensions, Internat. J. Bifur. Chaos Appl. Sci. Engrg. 1 (1991), 493-520. [25] E.J. Doedel, H.B. Keller and J.-E Kern6vez, Numerical analysis and control of bifurcation problems: (II) Bifurcation in infinite dimensions, Internat. J. Bifur. Chaos Appl. Sci. Engrg. 1 (1991), 745-772. [26] C. Elphick, E. Tirapegui, M.E. Brachet, EH. Coullet and G. Iooss, A simple global characterization for normal forms ofsingular vector fields, Phys. D 32 (1987), 95-127. [27] T.F. Fairgrieve and A. Jepson, O.K. Floquet multipliers, SIAM J. Numer. Anal. 28 (1991), 1446-1462.
218
W.-J. Beyn et al.
[28] B. Fiedler, Global pathfollowing of homoclinic orbits in two-parameter flows, Dynamics of Nonlinear Waves in Dissipative Systems: Reduction, Bifurcation and Stability, G. Dangelmayr, B. Fiedler, K. Kirchg~issner and A. Mielke, eds, Pitman Res. Notes Math. Ser., Vol. 352, Longman, Harlow (1996). [29] M.J. Friedman, Numerical analysis and accurate computation of heteroclinic orbits in the case of centre manifolds., J. Dynamics Differential Equations 5 (1993), 59-87. [30] A.T. Fuller, Condition for a matrix to have only characteristic roots with negative real parts, J. Math. Anal. Appl. 23 (1968), 71-98. [31] E Gaspard, Local birth ofhomoclinic chaos, Phys. D 62 (1993), 94-122. [32] W. Govaerts, Numerical Methods for Bifurcations of Dynamical Equilibria, SIAM, Philadelphia, PA (2000). [33] W. Govaerts and J.D. Pryce,, Mixed block elimination for linear systems with wider borders, IMA J. Numer. Anal. 13 (1993), 161-180. [34] W. Govaerts, J. Guckenheimer and A. Khibnik, Defining functions for multiple Hopf bifurcations, SIAM J. Numer. Anal. 34 (1997), 1269-1288. [35] A. Griewank and G.W. Reddien, The calculation of Hopfpoints by a direct method, IMA J. Numer. Anal. 3 (1983), 295-303. [36] A. Griewank and G.W. Reddien, Computation of cusp singularities for operator equations and their discretizations, J. Comput. Appl. Math. 26 (1989), 133-153. [37] J. Guckenheimer and M. Myers, Computing Hopf bifurcations. II. Three examples from neurophysiology, SIAM J. Sci. Comput. 17 (1996), 1275-1301. [38] J.K. Hale, Introduction to dynamic bifurcation, Bifurcation Theory and Applications, L. Salvadori, ed., Lecture Notes in Math., Vol. 1057, Springer, Berlin (1983), 106-151. [39] B.D. Hassard, Computation of invariant manifolds, New Approaches to Nonlinear Problems in Dynamics, P.J. Holmes, ed., SIAM, Philadelphia, PA (1980), 27-42. [40] B.D. Hassard, N.D. Kazarinoff and Y.-H. Wan, Theory and Applications of Hopf Bifurcation, Cambridge Univ. Press, London (1981). [41] M. Holodniok and M. Kubi6ek, DERPER - An algorithm for the continuation of periodic solutions in ordinary differential equations, J. Comput. Phys. 55 (1984), 254-267. [42] H.B. Keller, Numerical solution of bifurcation and nonlinear eigenvalue problems, Applications of Bifurcation Theory, E Rabinowitz, ed., Academic Press, New York (1977), 359-384. [43] H.B. Keller, Lectures on Numerical Methods in Bifurcation Problems, Springer, Berlin, Notes by A.K. Nandakumaran and M. Ramaswamy, Indian Institute of Science, Bangalore (1987). [44] H.B. Keller, Numerical Methods for Two-Point Boundary-Value Problems, Dover, New York (1992). [45] A.I. Khibnik, LINLBF: A program for continuation and bifurcation analysis of equilibria up to codimension three, Continuation and Bifurcations: Numerical Techniques and Applications, D. Roose, B. De Dier and A. Spence, eds, Kluwer, Dordrecht (1990), 283-296. [46] AT Khibnik, Y. Kuznetsov, V.V. Levitin and E.V. Nikolaev, Continuation techniques and interactive software for bifurcation analysis of ODEs and iterated maps, Phys. D 62 (1993), 360-371. [47] M. Kubi6ek and M. Marek, Computational Methods in Bifurcation Theory and Dissipative Structures, Springer, Berlin (1983). [48] Y.A. Kuznetsov, One-dimensional invariant manifolds in ordinary differential equations depending upon parameters, FORTRAN Software Series, Vol. 8, Research Computing Centre, USSR Academy of Sciences, Pushchino (1983) (in Russian). [49] Y.A. Kuznetsov, Elements of Applied Bifurcation Theory, Springer, Berlin (1995). [50] Y.A. Kuznetsov, Explicit normal form coefficients for all codim 2 bifurcations of equilibria in ODEs, Centrum voor Wiskunde en Informatica, Amsterdam, Report MAS-R9730 (1997). [51] Y.A. Kuznetsov, Elements of Applied Bifurcation Theory, 2nd edn., Springer, New York (1998). [52] Y.A. Kuznetsov and V.V. Levitin, CONTENT." A multiplaOCorm environment for analyzing dynamical systems, Dynamical Systems Laboratory, Centrum voor Wiskunde en Informatica, Amsterdam (1997), ftp.cwi. nl/pub/CONTENT. [53] L. Liu, G. Moore and R.D. Russell, Computation and continuation ofhomoclinic and heteroclinic orbits with arclength parametrizations, SIAM J. Sci. Comput. 18 (1997), 69-93. [54] Y. Liu, L. Liu and T. Tang, The numerical computation of connecting orbits in dynamical systems: a rational spectral approach, J. Comput. Phys. 111 (1994), 373-380. [55] J. Marsden and M. McCracken, HopfBifurcation and its Applications, Springer, Berlin (1976).
Numerical continuation, and computation o f normal forms
219
[56] Z. Mei, A numerical approximation for the simple bifurcation points, Numer. Funct. Anal. Optimiz. 10 (1989), 383-400. [57] V.K. Melnikov, On the stabili~ of the center for time periodic perturbations, Trans. Moscow Math. Soc. 12 (1963), 1-57. [58] G. Moore, The numerical treatment of non-trivial bifurcation points, Numer. Funct. Anal. Optimiz. 2 (1980), 441-472. [59] G. Moore, Computation and parametrisation of periodic and connecting orbits, IMA J. Numer. Anal. 15 (1995), 319-331. [60] G. Moore and A. Spence, The calculation of turning points of nonlinear equations, SIAM J. Numer. Anal. 17 (1980), 567-576. [61] L.S. Pontryagin, On dynamical systems close to Hamiltonian systems, J. Exptl. Theoret. Phys. 4 (1934), 234-238 (in Russian). [62] W.C. Rheinboldt, Numerical Analysis of Parametrized Nonlinear Equations, Wiley, New York (1986). [63] W.C. Rheinboldt and J.V. Burkardt, Algorithm 596: A program for a locally-parametrized continuation process, ACM Trans. Math. Software 9 (1983), 236-241. [64] A.J. Rodrfguez-Luis, E. Freire and E. Ponce, A method for homoclinic and heteroclinic continuation in two and three dimensions, Continuation and Bifurcations: Numerical Techniques and Applications, D. Roose, A. Spence and B. De Dier, eds, Kluwer, Dordrecht (1990), 197-210. [65] D. Roose, Numerical computation of origins for Hopf bifurcations in a two-parameter problem, Bifurcation: Analysis, Algorithms, Applications, T. Kfipper, R. Seydel and H. Troger, eds, Birkhfiuser, Basel (1987), 268-273. [66] D. Roose and V. Hlava6ek, A direct method for the computation of Hopf bifurcation points, SIAM J. Appl. Math. 45 (1985), 897-894. [67] R.D. Russell and J. Christiansen, Adaptive mesh selection strategies for solving boundary value problems, SIAM J. Numer. Anal. 15 (1978), 59-80. [68] J.A. Sanders, Versal normal form computation and representation theory, Computer Algebra and Differential Equations, E. Tournier, ed., Cambridge Univ. Press, Cambridge (1994), 185-210. [69] B. Sandstede, Verzweigungstheorie homokliner Verdopplungen, Ph.D. thesis, University of Stuttgart, Germany (1993). [70] B. Sandstede, Convergence estimates for the numerical approximation of homoclinic solutions, IMA J. Numer. Anal. 17 (1997), 437-462. [71] S. Schecter, Numerical computation of saddle-node homoclinic bifurcation points, SIAM J. Numer. Anal. 30 (1993), 1155-1178. [72] S. Schecter, Rate of convergence of numerical approximations to homoclinic bifurcation points, IMA J. Numer. Anal. 15 (1995), 23-60. [73] R. Seydel, From Equilibrium to Chaos. Practical Bifurcation and Stability Analysis, 2nd edn., Springer, New York (1994). [74] A. Spence, K.A. Cliffe and A.D. Jepson, A note on the calculation ofpaths of Hopf points, J. Comput. Appl. Math. 26 (1989), 125-131. [75] C. St6phanos, Sur une extension du calcul des substitutions lin~ares, J. Math. Pures Appl. 6 (1900), 73-128. [76] S.A. van Gils, On a formula for the direction of Hopf bifurcation, Centre for Mathematics and Computer Science, Report TW/225 (1982). [77] B. Werner, Computation of Hopf bifurcations with bordered matrices, SIAM J. Numer. Anal. 33 (1996), 435-455.
This Page Intentionally Left Blank
CHAPTER
5
Set Oriented Numerical Methods for Dynamical Systems Michael Dellnitz and Oliver Junge Department of Mathematics and Computer Science, University of Paderborn, D-33095 Paderborn, Germany E-mail: dellnitz @uni-paderborn, de http ://math- www. uni-pade rbo rn. de/-a g de l ln itz
Contents 1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
223
2. The computation of invariant sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1. Brief review on invariant sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
223 223
2.2. The computation of relative global attractors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3. Convergence behavior and error estimate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4. Numerical examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
224 227 228
2.5. The computation of chain recurrent sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
230
2.6. Numerical example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3. The computation of invariant manifolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1. Description of the method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2. Convergence behavior and error estimate 3.3. 4. The 4.1. 4.2.
................................
Numerical examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . computation of SRB-measures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Brief review on SRB-measures and small random perturbations . . . . . . . . . . . . . . . . . . . . Spectral approximation for the Perron-Frobenius operator . . . . . . . . . . . . . . . . . . . . . . .
4.3. Convergence result for SRB-measures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.4. 5. The 5.1. 5.2. 6. The
Numerical examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . identification of cyclic behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Extraction of cyclic behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Numerical examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . computation of almost invariant sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1. Almost invariant sets
...........................................
6.2. Numerical examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7. Adaptive subdivision strategies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1. Adaptive subdivision algorithm 7.2. Numerical examples
.....................................
...........................................
8. Implementational details . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.1. Realization of the collections and the subdivision step . . . . . . . . . . . . . . . . . . . . . . . . . H A N D B O O K OF D Y N A M I C A L S Y S T E M S , VOL. 2 Edited by B. Fiedler 9 2002 Elsevier Science B.V. All rights reserved 221
232 233 233 234 235 238 239 241 244 245 246 246 248 249 250 252 254 255 256 258 258
M. Dellnitz and O. Junge
222
8.2. Realization of the intersection test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.3. I m p l e m e n t a t i o n of the m e a s u r e c o m p u t a t i o n Acknowledgments References
..............................
259 262
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
263
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
263
Set oriented numerical methods for dynamical systems
223
1. Introduction Over the past years so-called set oriented numerical methods have been developed for the study of complicated temporal behavior of dynamical systems. These numerical tools can be used to approximate different types of invariant sets or invariant manifolds but they also allow to extract statistical information on the dynamical behavior via the computation of natural invariant measures or almost invariant sets. In contrast to other numerical techniques these methods do not rely on the computation of single long term trajectories but rather use the information obtained from several short term trajectories. All the methods which are described in this chapter are based on multilevel subdivision procedures for the computation of certain invariant sets. This multilevel approach allows to cover the object of interest - e.g., an invariant manifold or the support of an invariant meas u r e - by several small subsets of state space. Since outer approximations are produced and long term simulations are avoided these methods are typically quite robust. Recently also adaptive subdivision strategies have been developed and moreover concrete realizations have been proposed which allow to make the computations rigorous. The numerical methods presented here are similar in spirit to the so-called cell mapping approach, see, e.g., Kreuzer [31], Hsu [24]. However, a significant difference lies in the fact that in the cell mapping case the numerical effort depends crucially on the dimension of state space whereas for the multilevel subdivision procedures the efficiency essentially depends on the complexity of the underlying dynamics. We would also like to mention that by now there exist several relevant extensions and adaptations of the set oriented approach as described here. For instance, in [42,15] the authors develop and analyze set oriented algorithms which can be used for the identification of so-called conformations for molecules. Roughly speaking, these are almost invariant sets for a specific type of Hamiltonian systems. Another direction has been considered in Keller and Ochs [29]. There the set oriented approach has been successfully adapted to the context of random dynamical systems. In this chapter we give an overview about the developments in the area of set oriented methods for general deterministic dynamical systems. We report on both theoretical properties of the numerical methods and details concerning the implementation.
2. The computation of invariant sets In this section we present set oriented multilevel algorithms for the approximation of two different types of invariant sets, namely attracting sets and chain recurrent sets. We demonstrate the usefulness of this multilevel approach by several numerical examples.
2.1. Brief review on invariant sets We consider discrete dynamical systems
Xj+l = f (xj),
j -- O, 1, 2 . . . . .
(2.1)
224
M. Dellnitz and O. Junge
where f:]l~ n ---> ]t~n is a diffeomorphism and begin by recalling some types of invariant sets of such dynamical systems.
Attracting sets.
A subset A C ~n is called invariant if
f(A)=A. Moreover, an invariant set A is an attracting set with fundamental neighborhood U if for every open set V D A there is an N 6 N such that f J (U) Q V for all j ~> N. Observe that if A is invariant then the closure of A is invariant as well. Hence we restrict our attention to closed invariant sets A, and in this case we obtain
A -- A f j (U). jcN
By definition all the points in the fundamental neighborhood U are attracted by A. For this reason the open set UjcN f - J (U) is called the basin of attraction of A. If the basin of attraction of A is the entire ]1~n then A is called the global attractor. REMARKS 2.1. (a) Although the global attractor may not be compact, it typically happens in applications that all the orbits of the underlying dynamical system eventually lie inside a bounded domain, and in that case the compactness of A immediately follows. (b) The global attractor contains all the invariant sets of the dynamical system. This can easily be verified using the definitions.
Chain recurrent sets. Sometimes it is of interest to analyze the fine-structure of the dynamics on the global attractor. This is, e.g., accomplished by extracting recurrent subsets. A notion of recurrence which proved to be particularly useful is that of chain recurrence (see Conley [5]): DEFINITION 2.2. A point x E U C IR" belongs to the chain recurrent set of f in U if for every s > 0 there is an s-pseudoperiodic orbit in U containing x, that is, there exists { x - - x0, x I . . . . . xe_ l } C U such that
]lf(xi)-xi+,model]
~o
(2.2)
In the following remark we summarize some basic properties of A Q. REMARKS 2.4.
(a) The definition of AQ in (2.2) implies that AQ C Q and that f - 1 (AQ) C AQ, but not necessarily that f (A 0) C A Q. (b) A 0 is compact since Q is compact. (c) A Q is a subset of the global attractor A. In fact,
AQ -- {x 6 A" f - J (x) ~ Q for all j >~O}. (d) Denote by A the global attractor of f . Then in general
AQ~AAQ. Subdivision algorithm. The following algorithm provides a method for the approximation of relative global attractors. It generates a sequence B0,/31 . . . . of finite collections of compact subsets of IR" such that the diameter diam(/3k) = max diam(B) converges to zero for k --+ oo. Given an initial collection/30, we inductively obtain/3k from ~k-1 for k - 1,2 . . . . in two steps" (i) Subdivision: Construct a new collection/3k such that U
B-
U
B
(2.3)
and (2.4)
diam(~'k) ~< Ok diam(Bk_ l), where 0 < 0min ~ Ok ~ 0max < 1. (ii) Selection" Define the new collection/3k by 13, -- {B ~ &" 3B" E & such
that f - l (B) (q B"~k fJ}.
(2.5)
226
M. Dellnitz and O. Junge
By construction k xdiam(Bo)~0 diam(Bk) ~< 0ma
fork~cx).
EXAMPLE 2.5. We consider f : R --+ R, f (x) -- otx,
where ot 6 (0, 89 is a constant. Then the global attractor A = {0} of f is a stable fixed point. We begin the subdivision procedure with/3o - {[ - 1 , 1]} and construct Bk by bisection. In the first subdivision step we obtain A
z,-
B5 - {[-1, o], [o, ~]}.
No interval is removed in the selection step, since each of them is mapped into itself. Now subdivision leads to
Applying the selection rule (2.5), the two boundary intervals are removed, i.e.,
{[ Proceeding this way, we obtain after k subdivision steps
{[ 10]E0
We see that the union [.-Jsct3k B is indeed approaching the global attractor A = {0} for k --+ cx~. The speed of convergence obviously depends on the contraction rate of the global attractor. We will come back to this observation in Section 2.3. Convergence result. The abstract subdivision algorithm does converge to the relative global attractor A Q. In fact for the nested sequence of sets
Ok -- U
B,
k=0,1,2
(2.6)
BEBk
one can show the following result (see Dellnitz and Hohmann [8]). PROPOSITION 2.6. Let AQ be a global attractor relative to the compact set Q, and let 13o be a finite collection o f closed subsets with Qo - USEI3o B -- Q. Then lim h(AQ, Qk) = O,
k-----~cx~
Set oriented numerical methods for dynamical systems
227
where h(B, C) denotes the usual Hausdorff distance between two compact subsets B, C c R n . 2.3. Convergence behavior and error estimate We begin by recalling the definition of a hyperbolic set (see, e.g., Shub [43]). DEFINITION 2.7. Let A be an invariant set for the diffeomorphism f . We say that A is
a
U hyperbolic set for f if there is a continuous invariant splitting TAR" = ESA G E A,
Df(EI~. ) _ Ef(x )s
and
D f ( uE, x) -- Euf(x),
for which there are constants c > 0 and )v E (0, 1), such that: (a) if v E E S~,then [[Df j (x)vi[ ~< C~j ]IV[[ for all j E N; (b) if v E Eta!, then [[Df-J (x)v[[ ~< c)U [[v[[ for all j E N. Since the estimates in Definition 2.7 are formulated in terms of the Jacobians, they are just valid infinitesimally for f . A consideration of the asymptotic behavior with respect to the diffeomorphism f itself leads to the definition of stable and unstable manifolds. DEFINITION 2.8. For x E R" and e > 0 we define the local stable (unstable) manifold by
W~~(x) - {y E N"" d ( f j (x), f J (y)) --+ 0 for j --+ ec and d ( f j (x), f J (y)) 0},
W~' (x) -- {y E R"" d ( f j (x), f J (y)) --+ 0 for j --+ - e c and d ( f j (x), f J (y)) 0. Note that A = AQ. As in (2.7) let p >/1 be a constant such that for every compact neighborhood Q c Q of A a we have
h(AQ, Q) 0 for i = 1 . . . . . n, are the center and the radius respectively. In the kth subdivision step we subdivide each rectangle B(c, r) of the current collection by bisection with respect to the j th coordinate, where j is varied cyclically, that is, j = ((k - 1) mod n) + 1. This division leads to two rectangles B _ ( c - , F ) and B+(c+,F), where r~ --
ri
for/r
j,
ri/2
for i -- J,
c/i --
I Ci
for/r
/ ci -4- ri/2
for i -- j.
j,
Starting with a single initial rectangle we perform the subdivision until a prescribed size of the diameter relative to the initial rectangle is reached. The collections constructed in this way can easily be stored in a binary tree. In Figure 21 we show the representation of three subdivision steps in three dimensions (n = 3) together with the corresponding sets Q~, k = 0, 1, 2, 3, see (2.6). Note that each collection and the
Set oriented numerical methods for dynamical systems
259
Fig. 21. Storage scheme for the collections and the corresponding coverings Qk, k = 0, 1,2, 3.
corresponding covering Qk are completely determined by the tree structure and the initial rectangle.
8.2. Realization of the intersection test In the subdivision algorithms as well as in the continuation method we have to decide whether for a given collection Bk the image of a set B 6 Bk has a nonempty intersection with another set B ~ ~ 13k, i.e., whether (8.1)
f (B) N B' = f~.
In simple model problems such as our trivial Example 2.5 this decision can be made analytically. For more complex problems we have to use some kind of discretization. Motivated by similar approaches in the context of cell-mapping techniques (see Hsu [24]), we choose a finite set of test points in each set B E 13k and replace the condition (8.1) by f(x) ~ Bt
for all test points x 6 B.
(8.2)
Obviously, it may still occur that f ( B ) N B t is nonempty although (8.2) is valid. Distribution of test points. It remains to discuss how the test points are distributed inside each rectangle. To define the test points, observe that R(c, r) is the affine image of the standard cube [ - 1 , 1]n scaled by r and translated by c. Using this transformation it is sufficient to define the test points for the standard cube. Simple geometric considerations make it clear that one should obtain the best results for the test in (8.2) if most of the test points are lying on the boundary of the rectangle. An efficient choice for problems of dimension up to three turned out to be N test points on each edge distributed according to t(s
2s
1 N
1
fors
..... N
(8.3)
on [ - 1, 1]. As an additional test point we choose the center c = 0. Since an n-dimensional rectangle has n2 n-1 edges, we end up with p -- N n 2 n-1 + 1 test points per box.
M. Dellnitz and O. Junge
260
Rigorous choice of test points.
The numerical realization of the intersection test can be made rigorous in the sense that no boxes are lost due to the discretization. Indeed, to accomplish this it is sufficient to have estimates for the Lipschitz constants of the dynamical system f on Q. To be more precise let B be a collection of boxes B = B(c, r) = {x: Ix - cl ~< r} (where we write I x l - (Ixll . . . . . Ixnl) and x ~< y for x, y ~ N n, if Xi ~ Yi for i = 1 . . . . . n). We need to compute the set-wise image S'(B)-
{B' ~ B I f ( B ) n B' # 0}, A
for every B 6 B. Our goal here is to construct a set f ' ( B ) of boxes for which A
.T'(B) c .T'(B), so that we get a rigorous covering of f (B). To this end we will need to know local Lipschitz constants for f , that is, we require that for every box B in the current collection there is a nonnegative matrix L = L (B) 6 ]l~n x n such that
If(Y)- f (x)l 0 such that M h ~< 2r,
(8.9) h
and use the mesh as defined by (8.7) as well as the construction (8.5) for f ( B ) . It can easily be shown that the union o f b o x e s in f ( B ) covers f ( B ) , i.e., that f ' ( B ) C 9t-(B), see Junge [26] for details.
8.3. Implementation of the measure computation The feasibility of the computation of invariant measures even for higher dimensional systems relies on the fact that we first compute an outer covering 13 of the underlying invariant set by one of the set oriented methods presented in this chapter. As the ansatz spaces Vd for the discretization of the Perron-Frobenius operator we use the spaces of simple functions on the given collection/3. It is easy to see that the PerronFrobenius operator is then given by a stochastic matrix P = (pij) with entries
Pij =
m(f-l(Bi)nBj)
m(Bj)
'
Bi, B j E ]3.
For the computation of the Pij'S w e either use a Monte-Carlo approach (see Hunt [25]) or an exhaustion technique as described in Guder et al. [22]. The latter method is particularly useful when local Lipschitz constants are available for the underlying dynamical system. For the computation of certain eigenvectors of the resulting (sparse) matrix P an Arnoldi method is used (see Lehousq et al. [34]).
Set oriented numerical methods f o r dynamical systems
263
Acknowledgments Figures 4, 6, 7, 9 and 16 have been produced using the software platform GRAPE, see Rumpf and Wierse [41 ]. References [1] M. Benedicks and L.-S. Young, Sinai-Bowen-Ruelle measures for certain H~non maps, Invent. Math. 112 (1993), 541-576. [2] M. Blank and G. Keller, Random perturbations of chaotic dynamical systems. Stability of the spectrum, Nonlinearity 11 (5) (1998), 1351-1364. [3] R. Bowen and D. Ruelle, The ergodic theory, ofAxiom A flows, Invent. Math. 29 (1975), 181-202. [4] P. Chossat and M. Golubitsky, Symmetry-increasing bifurcation of chaotic attractors, Phys. D 32 (1988), 423-436. [5] C. Conley, Isolated Invariant Sets and the Morse Index, Amer. Math. Soc., Providence, RI (1978). [6] M. Dellnitz, G. Froyland and St. Sertl, On the isolated spectrum of the Perron-Frobenius operator, Nonlinearity 13 (4) (2000), 1171-1188. [7] M. Dellnitz and A. Hohmann, The computation of unstable manifolds using subdivision and continuation, Nonlinear Dynamical Systems and Chaos, H.W. Broer, S.A. van Gils, I. Hoveijn and F. Takens, eds, PNLDE, Vol. 19, Birkh~iuser, Basel (1996), 449-459. [8] M. Dellnitz and A. Hohmann, A subdivision algorithm for the computation of unstable manifolds and global attractors, Numer. Math. 75 (1997), 293-317. [9] M. Dellnitz and O. Junge, Almost invariant sets in Chua's circuit, Internat. J. Bifur. Chaos 7 (11) (1997), 2475-2485. [10] M. Dellnitz and O. Junge, An adaptive subdivision technique for the approximation of attractors and invariant measures, Comput. Visual. Sci. 1 (1998), 63-68. [11] M. Dellnitz and O. Junge, On the approximation of complicated dynamical behavior, SIAM J. Numer. Anal. 36 (2) (1999), 491-515. [12] M. Dellnitz, O. Junge, M. Rumpf and R. Strzodka, The computation of an unstable invariant set inside a cylinder containing a knotted flow, Proceedings of Equadiff '99, Berlin (2000). [13] M. Dellnitz, O. Schtitze and St. Sertl, Finding zeros by multilevel subdivision techniques, IMA J. Numer. Anal. (2001) (to appear). [14] E Deuflhard, M. Dellnitz, O. Junge and Ch. Schtitte, Computation of essential molecular dynamics by subdivision techniques, Computational Molecular Dynamics: Challenges, Methods, Ideas, E Deuflhard, J. Hermans, B. Leimkuhler, A.E. Mark, S. Reich and R.D. Skeel, eds, Lecture Notes in Comput. Sci. Engrg., Vol. 4, Springer, Berlin (1998), 98-115. [15] P. Deuflhard, W. Huisinga, A. Fischer and Ch. Schtitte, Identification of almost invariant aggregates in reversible nearly uncoupled Markov chains, Linear Algebra Appl. 315 (2000), 39-59. [ 16] J. Ding, Q. Du and T.Y. Li, High order approximation of the Frobenius-Perron operator, Appl. Math. Comput. 53 (1993), 151-171. [ 17] J. Ding and A. Zhou, Finite approximations of Frobenius-Perron operators. A solution of Ulam's conjecture to multi-dimensional transformations, Phys. D 1-2 (1996), 61-68. [18] J.R. Dormand and EJ. Prince, Higher order embedded Runge-Kutta formulae, J. Comput. Appl. Math. 7 (1981), 67-75. [19] M. Eidenschink, Exploring global dynamics: A numerical algorithm based on the Conley index theory, Ph.D. thesis, Georgia Institute of Technology (1995). [20] G. Froyland, Estimating physical invariant measures and space averages of dynamical systems indicators, Ph.D. thesis, University of Western Australia (1996). [21 ] J. Guckenheimer and Ph. Holmes, Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields, Springer, Berlin (1983). [22] R. Guder, M. Dellnitz and E. Kreuzer, An adaptive method for the approximation of the generalized cell mapping, Chaos, Solitons and Fractals 8 (4) (1997), 525-534.
264
M. Dellnitz and O. Junge
[23] R. Guder and E. Kreuzer, Control of an adaptive refinement technique of generalized cell mapping by system dynamics, J. Nonl. Dyn. 20 (1) (1999), 21-32. [24] H. Hsu, Global analysis by cell mapping, Internat. J. Bifur. Chaos 2 (1992), 727-771. [25] EY. Hunt, A Monte Carlo approach to the approximation of invariant measures, Random Comput. Dynamics 2(1) (1994), 111-133. [26] O. Junge, Mengenorientierte Methoden zur numerischen Analyse dynamischer Systeme, Ph.D. thesis, University of Paderborn (1999). [27] O. Junge, An adaptive subdivision technique for the approximation of attractors and invariant measures. Part II: Proof of convergence (2000) (submitted). [28] G. Keller, Stochastic stability in some chaotic dynamical systems, Monatsh. Math. 94 (1982), 313-333. [29] H. Keller and G. Ochs, Numerical approximation of random attractors, Stochastic Dynamics, Springer, Berlin (1999), 93-115. [30] Yu. Kifer, General random perturbations of hyperbolic and expanding transformations, J. Anal. Math. 47 (1986), 111-150. [31 ] E. Kreuzer, Numerische Untersuchung nichtlinearer dynamischer Systeme, Springer, Berlin (1987). [32] A. Lasota and M.C. Mackey, Chaos, Fractals and Noise, Springer, Berlin (1994). [33] A. Lasota and J.A. Yorke, On the existence of invariant measures for piecewise monotonic transformations, Trans. Amer. Math. Soc. 186 (1973), 481-488. [34] R.B. Lehoucq, D.C. Sorensen and C. Yang, ARPACK Users' Guide, SIAM, Philadelphia, PA (1998). [35] T.-Y. Li, Finite approximation for the Frobenius-Perron operator. A solution to Ulam's conjecture, J. Approx. Theory 17 (1976), 177-186. [36] K. Mehlhorn, Data Structures and Algorithms, Springer, Berlin (1984). [37] R. Murray, Adaptive approximation ofinvariant measures, Preprint (1998). [38] J.E. Osborn, Spectral approximation for compact operators, Math. Comp. 29 (131 ) (1975), 712-725. [39] G. Osipenko, Construction of attractors and filtrations, Conley Index Theory, K. Mischaikow, M. Mrozek and E Zgliczynski, eds, Banach Center Publications, Vol. 47 (1999), 173-191. [40] D. Ruelle, A measure associated with Axiom A attractors, Amer. J. Math. 98 (1976), 619-654. [41] M. Rumpf and A. Wierse, GRAPE, eine objektorientierte Visualisierungs- und Numerikplattform, Informatik, Forschung und Entwicklung 7 (1992), 145-151. [42] Ch. Schfitte, Conformational Dynamics: Modelling, Theory, Algorithm, and Application to Biomolecules, Habilitation thesis, Freie Universitfit Berlin (1999). [43] M. Shub, Global Stability of Dynamical Systems, Springer, Berlin (1987). [44] Y.G. Sinai, Gibbs measures in ergodic theory, Russian Math. Surveys 166 (1972), 21-69. [45] W. Tucker, The Lorenz attractor exists, C. R. Acad. Sci. Paris S6r. I Math. 328 (12) (1999), 1197-1202. [46] S.M. Ulam, A Collection of Mathematical Problems, Interscience, New York (1960). [47] K. Yosida, Functional Analysis, Springer, Berlin (1980).
CHAPTER
6
Numerics and Exponential Smallness Vassili Gelfreich* The Steklov Mathematical Institute at St. Petersburg, Russia Institut fiir Mathematik I, FU, Berlin, Germany E-mail:
[email protected] Contents 1. A glance on "invisible" chaos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2. Chaotic dynamics of a symplectic integrator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3. Discretization as a rapid periodic forcing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4. Averaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5. Flow box theorems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6. Saddle points and separatrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7. Splitting of complex separatrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8. Exponential smallness of the splitting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9. Lower bounds for the splitting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10. Splitting of separatrices near resonant periodic orbits . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11. Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Appendix A: Fourier modes of analytic functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Appendix B: L e m m a on Cauchy integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Appendix C: Analytic solutions of finite-difference equations . . . . . . . . . . . . . . . . . . . . . . . . . Appendix D: Analytic parameterization of separatrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
267 271 274 278 285 287 289 291 295 298 303 303 304 307 309 311
*The author thanks the Alexander von Humboldt foundation. The work was partially supported by DFG priority program "Analysis, Modeling and Simulation of Multiscale Problems". H A N D B O O K OF D Y N A M I C A L SYSTEMS, VOL. 2 Edited by B. Fiedler 9 2002 Elsevier Science B.V. All rights reserved 265
This Page Intentionally Left Blank
Numerics and exponential smallness
267
1. A g l a n c e o n " i n v i s i b l e " c h a o s
In the recent decades the progress of computers and the development of new numerical tools have produced a great impact on the development of Mathematics (and not only, of course). The m o d e r n computers are quite fast, a n d - although it may seem to be paradoxical - it results that it often requires less time to compute something than to show that the results have something to do with the original problem. Any numerical method has two main sources of errors. The first one is related to unavoidable round-off errors. Their influence can be reduced by multiprecision arithmetics, which is quite fast now. One can repeat a computation with higher precision in order to estimate the importance of the round-off for the computer experiment. The second source of errors is due to the numerical method itself: an original problem has to be substituted by a problem suitable for computer treatment. We avoid a discussion of the round-off errors and try to give at least a partial answer to the following naive questions. Can a numerical method exhibit qualitative behavior different from the original system? If yes, how can we describe and measure this difference? The answer depends on the nature of the problem. We restrict our attention to the behavior of trajectories for an autonomous system of differential equations,
,;c=f(x),
xEDCR".
(1)
The vector field f is assumed to be analytic and bounded. We may say that the independent variable t is "time", and consider the system and its numerical solutions from the viewpoint of Dynamical Systems. The system of differential equations defines a (local l) flow ~ t which moves a point along its trajectory. Let x(t) be a solution of the differential equation. Then q~t (x0) = x(t), provided x (0) = x0. In order to compute a trajectory, it is necessary to choose an integration scheme, which allows to compute a trajectory for a discrete subset of time values, e.g., t = ks, k E N. The numerical trajectory is computed recursively: we define an initial value x0 and then compute the sequence
Xk+l = F~(xk),
k >10.
From the dynamical systems viewpoint the numerical trajectory is a trajectory of a dynamical system with discrete time. This dynamical system is defined by iterations of the map Fe. The numerical scheme is defined by an integrator. An integrator of order p and step-size s is a parametric map, Fe : D --+ R", such that Vx e D.
(2)
I We say that the flow is global, if it is defined for all t and all x 6 D. A flow is not always global - a trajectory can cross the boundary of D and leave the domain of the vector field. In some applications the domain is not bounded and the vector field grows at infinity. Then a trajectory can go to infinity in finite time. In particular, if D = Rn , this is the unique possible reason for a flow to be nonglobal. In such cases it is often possible to find an invariant compact subset, D' C D, then the restriction q~t iD' is a global flow.
V. Gelfreich
268
For example, Euler's method (first order, p = 1) seems to be the most classical one. It is not too difficult to construct an integrator of an arbitrary order p. The Taylor method is naive but very efficient: the system of differential equations (1) can be used to compute consequently an arbitrary large number of derivatives 2 of x(t) at t = 0; using the first p derivatives to compute the first p terms of the Taylor expansion of x(t) for t = e, one obtains an integrator of order p. There are many excellent books and papers, which describe constructions of integrators. The flow ~,t may have some special properties due to special properties of the vector fields itself. For instance if the vector field is Hamiltonian, the flow preserves areas. In this and similar cases it is reasonable to use an integrator which preserves the special properties of the flow. This gives a hope for a better qualitative matching between numerical and exact trajectories. All integrators belong to a remarkable class of close-to-identity maps: F~ (x) = x + O(e). This simple remark will play an important role later. In (2) the term O(e p+I) is the local error, which describes the error of one numerical step. One has to iterate the integrator to get an approximation for a trajectory. For a fixed k and small e
xk-- F (xo . Of course, the constant in the O-estimate generally increases with k. One has to make k = e - I t steps to obtain x(t) for a prefixed value of t. Since the map Fe is t-close to identity, it can be checked that for a fixed positive time the distance between the exact and numerical trajectory is O(e p) provided the original trajectory and the numerical one do not leave the domain D. What happens for larger times? It is easy to compute. For example we consider the pendulum equation, m
y,
-- sin(x), which is Hamiltonian, i.e., it has the form -
OH
~(x,
Oy OH -- - ~ ( x , Ox
y),
y),
2 This can be done either symbolically or by computing the numerical values of the higher order derivatives in a recurrent way based on Leibnitz rule (see, e.g., [5]).
269
Numerics and exponential smallness
where H is the Hamiltonian,
y2 H (x, y) -- - f + cos x - 1. The coordinate x is usually considered as an angle variable. Then the phase space becomes a cylinder. The phase space of the pendulum consists of 3 parts: two zones of pendulum rotations (clockwise and counterclockwise), and a zone of pendulum oscillations. These zones are separated by two curves, which are called separatrices. Each of the separatrices is formed by a trajectory doubly asymptotic to the unstable upper equilibrium. So the dynamics of the pendulum is quite simple - all its trajectories (except 4 of them: 2 equilibria and 2 separatrices) are periodic. The flow of the pendulum is global. It has two remarkable properties: the map 45t is area-preserving; and the Hamiltonian H is an integral of motion, i.e., it is constant along trajectories. We study the pendulum numerically using the area-preserving Euler method, Fe" (x, y) ~ (xm, Yl),
where
xl - - x + eyl, Yt -- Y + e s i n x . The integrator coincides with the famous standard map, well known in the physical and mathematical literature. We showed 4 trajectories of the integrator on Figure 1 (do not forget that the phase space is the cylinder). It is clearly seen that the numerical scheme well reproduces the trajectories of the pendulum. But there is a small exception, namely, the separatrix of the
1
o
-1
-2
-3 --7i-
2
2
Fig. 1. Four trajectories of the standard map, s = 0.25
V. Gelfreich
270
pendulum. The pendulum separatrix is defined by H (x, y) = 0 and it consists of two invariant branches: one belongs to the upper half-plane, and the second branch belongs to the lower half-plane. On the other hand, one of the numerical trajectories of Figure 1 was started very close to the origin, and it draw both "branches" of the separatrix. On Figure 2 we enlarge a small neighborhood of the origin to see more details of these trajectory. The black set is filled by one trajectory only. It is often called a "chaotic layer". The form of this layer is apparently rather regular. But the picture is static, it does not reflects the dynamics. An observer can sit near a computer screen and look how this set is filled by the trajectory: this process seems to be rather chaotic. Some idea of a typical behavior of the trajectory of Figure 2 may be obtained from Figure 3. The trajectory irregularly switches between "oscillation" and "rotations". This is "chaotic" behavior. We give a more precise mathematical meaning to this in the next section. We see that in our case the chaos induced by the numerical scheme appears on extremely small space scales. It was called invisible [9]. One of the main goals of the present paper is to explain that such phenomena are exponentially small with respect to the step-size e and to provide an introduction in perturbation methods suitable for the study of exponentially small phenomena. The exponential smallness makes the chaos, induced by the numerical integrator, almost invisible. Nevertheless, it can lead to important qualitative differences between exact and numerical solutions.
1 e-05
5e-06
-5e-06
- 1 e-05 -1 e-05
i -5e-06
0
5e-06
1 e-05
Fig. 2. One trajectory of the standard map, e = 0.25, around one million iterates of a point (magnification of a part of Figure 1).
Numerics and exponential smallness
271
Fig. 3. The x-component of a numerical trajectory (standard map, e = 0.25, initial conditions are from the chaotic zone of Figure 2).
2. Chaotic dynamics of a symplectic integrator The uniqueness of solutions and the continuous (smooth) dependence from initial conditions are the two basic properties of differential equations. That is, if one defines a position of a point at the initial moment of time, x(O) = x0, then the trajectory x(t) is uniquely defined for all t (provided the trajectory does not leave the domain of the vector field and does not escape to infinity in finite time). In other words, for any fixed time the flow ~ t is well defined and smooth. Of course, the integrator is also well defined and smooth (by its definition). Consequently, the dynamics of the differential equation and of its integrator are both completely deterministic. How can something "chaotic" coexist with the deterministic behavior? There is no way to determine the initial conditions exactly. As we will illustrate it in this section, an arbitrarily small error in initial conditions can lead to the complete loss of precision in comparatively short time. As a result an observer with limited precision of observation has no possibility to distinguish between a completely deterministic trajectory of a differential equation (or a numerical scheme) and a random process, similar to the flipping of a coin. Moreover, a numerical scheme can introduce chaotic dynamics into an originally regular system.
272
V. Gelfreich
Fig. 4. Smale horseshoe. The chaotic behavior of a dynamical system is described in the language of symbolic dynamics, introduced by the Russian mathematician V.M. Alekseev at the end of the 60s [ 1]. One of the simplest models, which exhibits chaotic motions, is the famous Smale horseshoe. It is also interesting, since it appears in many applications. Consider a smooth map F defined on a subset of the plane, which includes the unit square [0, 1] • [0, 1]. We will consider only those trajectories, which remain inside the square. So there is no need to describe the map outside the square. Let the restriction of the map F onto the square be described as a composition of two transformations (see Figure 4). The first one is just a linear transformation, described, for example, by the matrix
t0 ) 3
0
This map transform the square into a long horizontal rectangle. The second transformation bends the rectangle into the form of a horseshoe and puts it onto the original square. The second transformation is identical on the intersection of the rectangle with the square, the part "1". It rotates by re the part marked by "3" and translates it back onto the original square. Let us denote the original square by D, and the gray (closed) rectangles "1" and "3" by A and B, respectively, A, B C D. The initial conditions for trajectories which nether leave D belong to the intersection, K -- ~k~>0 Fk (D). EXERCISE. Show that the set K is a nonempty closed (forward-) invariant set. It is the interval [0, 1] times the Kantor set. 3 Let us consider the set of infinite sequences composed of two symbols A and B. Let ai E { A, B } denote the ith element of a sequence a. By the construction of the set K for any point, z0 6 K, there is a symbolic sequence a = {ai }/~--0 such that F i (zo) E ai. The inverse is also true. For any sequence a there is an initial condition, z0 = (x0, y0), such that F i (zo) E ai for all i. EXERCISE. Prove it. Hint: show that the s e t rqi-o F i (ai) is a nonempty closed set (like in the previous exercise). Any point of this intersection can play the role of z0. If we let k E Z in the definition of the set K and consider bi-infinite sequences a then the correspondence between the set K and the set of the sequences a is one-to-one, thanks to the hyperbolicity. 3 This is a comparatively elementary exercise, which is much easier to do yourself, than to understand arguments written by someone else.
Numerics and exponential smallness
273
Let us suppose that a point zo corresponds to a symbolic sequence, a - - {ai }~=0' so that F i (ZO) E a i . Let zl = F ( z o ) , then F i (Zl) E a i + l . Consequently, the point zl corresponds to the shifted s e q u e n c e , {ai+l}i~=0 . One can say that FIK is semiconjugated to the shift on the set of symbolic sequences, or, in other words, we have constructed the symbolic dynamics. The set of the symbolic sequences can be supplied with a topology a n d - that is very i m p o r t a n t - with a probability measure. In Probability Theory the (Bernoulli) shift on the set of symbolic sequences of two symbols describes r a n d o m processes, like the flipping of a coin. We say that a map is chaotic if its restriction on a closed invariant set is semiconjugated with a Bernoulli shift defined on the space of infinite sequences. Let us suppose that the precision of an observer affords to decide if a point belongs to A or to B (except, perhaps, if it is too close to the boundary), but does not permit to measure positions with higher accuracy. If the initial conditions belong to the set K the observer can not distinguish a trajectory of a point zo 6 K and a randomly generated sequence. 4 The remarkable property of the Smale horseshoe is its stability to perturbations: the symbolic dynamics may be introduced even in the case of a notably d e f o r m e d horseshoe. We use the following example to illustrate, how a Smale horseshoe appears in a symplectic integrator. We consider the Hamiltonian flow, described by the Hamiltonian, 5
1
H -- x y - - ( ~ ( x + y)3
The dynamics of the corresponding flow is rather simple. There are 2 stationary points, one is at the origin and the second is at (1, 1). The separatrix of the saddle point (0, 0) is defined by the equation H (x, y) -- 0 and it has the form of a fish (see Figure 5). Inside the separatrix loop all trajectories are periodic, and outside all trajectories go to infinity both in positive and negative time. We use the following symplectic integrator: 6 F~, :(x, y) w+ (x l, Yl), where x l = ) ~ - l x + c ( x + )~y)2, yl -- )~y - c)~(x + ~,y)2,
and )~ = 1 + e, c = (1 - k - l ) / ( 1 + )~)2. The constant c defines the scaling. We have chosen it in such a way that the point (1, 1) is a fixed points of the integrator for all e. The origin is a saddle point of F~. The eigenvectors of the matrix D Fe (0) are horizontal and vertical. According to the H a d a m a r d - P e r r o n theorem the map Fe has one dimensional stable and unstable invariant manifolds, which are also called separatrices. The stable separatrix has a horizontal tangent at the origin, and the unstable manifold has a vertical tangent 4 On the other hand, in the Hamiltonian case KAM theorem implies that the most part of initial conditions
correspond to regular quasi-periodic behavior. The problem of existence of chaos on an invariant set of positive measure remains mainly open. 5 This is the "fish" Hamiltonian H = p2/2 + q2/2 - q3/3 after rotating by zr/4. We use it in this form to have more beautiful pictures. 6 The integrator F~ coincides with the area-preserving Hen6n map. The splitting of its separatrices for small e was described - as a special case- in [15].
V. Gelfreich
274
0.5
O, such that f o r all e E (0, so) and x E D + i8' the integrator Fe(x) coincides with a succession map o f a
V. Gelfreich
276
differential equation, Jc = f (x, t/e, e), defined by the nonautonomous vector field, f (x, t/e, e) = f (x) + e p g(x, t/e, e), where g (x, r, e) = g (x, r + 1, e) is 1-periodic with respect to the fast time r. The function g is smooth (C~ bounded by an e-independentconstant, and it is analytic in x on D + i6'. REMARK 1. If the differential equation is Hamiltonian and the integrator is symplectic the time-dependent vector field can be also made n o n a u t o n o m o u s Hamiltonian. The corresponding ideas go back to the works by J. Moser in the middle 50s, see, e.g., [3]. REMARK 2. The theorem remains valid if the smoothness in e is replaced by boundedness. That is enough if one is mainly interested in getting upper and lower bounds only. In fact, the smoothness in e has no important influence on the conclusions of all general theorems of this chapter. The function g may be also chosen analytic with respect to time. But the corresponding proof is much more complicated, and it does not add too much to our approach. PROOF OF THEOREM 1.8 First, we produce an explicit expression for trajectories in the extended phase space and then we prove that the corresponding velocities define a nonaut o n o m o u s vector field with the required properties. 9 It is convenient to consider the equation (1) in the extended phase space, (D + i6) x ( N / Z ) , formally adding the angle variable q):
Jc = f ( x ) , ( 9 = lie. If we choose an arbitrary point x0 from the domain of the local flow, then the corresponding trajectory of the extended flow connects the points (x0, 0) and (4~ e (x0), 1). We deform this curve to connect the points (x0, 0) and (Fe (x0), 1). We use the following trick. Let X0 : R ~ R be a C a m o n o t o n e function, such that xo(r)-
1,
O,
r ~< 1/4, r~>3/4,
and let X1 ('g) = 1 - x o ( r ) . 8 Here I rearranged the proof from [9]. Neishtadt [21] used a similar fact as something completely obvious. There are infinitely many ways of constructing the nonautonomous vector field. The simplest construction is to define a trajectory in the following way: it goes along a straight line from a point (x, 0) to the point (Fe(x), 1). This is not a completely satisfactory solution for our problem: (1) the nonautonomous vector field is not smooth (it can have jumps at the points with q9= 0 mod 1); (2) the perturbed trajectories are only e 2-close to the unperturbed ones. So we go by a more sophisticated way. 9
Numerics and exponential smallness
~
277
,I,~(x,) )
.F 1 d; 0
Fig. 7. Construction of the interpolating trajectory. EXERCISE. Write an explicit example of X0. Let us choose the point x l in such a way that the unperturbed trajectory, which starts at x l arrives to the point Fs (x0) after the time t = s, i.e., the point x l has to be chosen from the condition (bS(xl) = G(xo). We can simply let xl = ~-S(Fs(xo)). Since q~S(x) -Fs(x) + O ( e p + I ) , we have xl - x 0 = O ( s P + l ) . Now we can define the interpolating trajectory (see Figure 7),
2(t, xo, s) = Xo(t/s)~ t (xo) + XI (t/s) clgt(Xl),
t 9 [0, s].
(3)
In the extended phase space the equation (x qg) = (2(t x0 s) t_) defines a smooth curve, which connects the point (x0, 0) to the point (Fs (x0), 1). First, this curve follows the unperturbed trajectory of x0, then it smoothly switches to the unperturbed trajectory of x l. For an arbitrary point, (x, 99) E (D + i3') • (IR/Z), there is a unique x0, such that the trajectory with the initial condition at (x0, 0) passes through (x, qg). Indeed, the map x0 w-~ 2(t, x0, s), where t = sqg, is s-close to identity and analytic. Consequently, it is invertible and the inverse map is defined on D + i3' provided s0 is sufficiently small. The inverse map defines x0 as a function of x:
xo(x, s~o, s) - x + O(s). We define the vector field at the point (x, 99) as the velocity vector of the corresponding trajectory, i.e.,
f(~, ~, ~) -
0
~7
2(t,xo(x, s~o, s), s). t = e (fl
We can calculate the derivative explicitly:
f (x, qg, s) -- Xo(t/s) f (~t (xo)) + Xl (t/s) f (~t (x,)) + s -~ (x~(t/s)~' (xo) + xl (ts)~' (x,)),
t =s~o,
V. Gelfreich
278
where we used (O/at)c19 t (x) = f ( ~ t (x)). This defines a smooth vector field on the extended phase space, (D + i6') x (R/Z). For all points, except ~0 -- 0mod 1, the smoothness of f follows from the explicit formula. In a small neighborhood of ~p = 0 mod 1 the vector field f (x, qg, e) -- f (x) which is smooth. Let us estimate the time-dependent part of f . By the definition x0(r) + Xl (r) -- 1 for all r, then x~(r) + XI (r) -- 0. By the construction if a point (x, qg) belongs to an interpolating trajectory with the initial condition (x0, 0), then the point x belongs to a rectilinear segment, which connects the points q0e~~(x0) and q0e~~(x 1). The length of this segment is O(ep+l). Consequently,
cber
-- x + O(e p+')
and
cber
= x + O(eP+'),
since the distance from an internal point of the segment to its endpoints can not exceed the length of the segment. Substituting all this into the formula for f we obtain
f (x, r, E) -- f (x) + O(eP). Consequently, the equality,
g(x, r,e)- e-P(jg(x,r,E)- f(x)), defines a 1-periodic with respect to the fast time r function, which is smooth, bounded by a constant, and analytic in x on D + i6'. This finishes the proof of the theorem. E]
4. Averaging In the previous section we proved that the discretization is equivalent to a small rapid periodic perturbation of the original system, i.e., the integrator of the autonomous system :f -- f (x) coincides with the succession map for the nonautonomous system,
~c -- f (x) + eP g(x, t/E, e).
(4)
In such a situation, we say that the integrator is interpolated by the nonautonomous flow. The interpolating flow is not uniquely defined. In this section we use the averaging procedure to show that the integrator can be interpolated by an almost autonomous flow, the time-dependent term of which is exponentially small compared with the integrator stepsize. We achieve this by a close-to-identity coordinate change, l~
x -- y + ePu(y, t/e, e), 10 The construction of this section provides the coordinate change and the new vector field, which are generally not continuous with respect to ~. This is due to the construction itself. A trivial modification of the procedure leads to C c~ dependence. I leave this step as an exercise for an advanced reader.
Numerics and exponential smallness
279
such that y satisfies the equation,
(5)
= f ( y , e) + ePg,(y, t/e, e) with f (y, e) = f (y) + O(e p)
and
~(y, t/e, e) = O(e -c/e)
for some positive constant c. The coordinate change is 1-periodic with respect to the fast time, r = t/e, and it is identical for r = 0 since we will choose u(y, O, e) = O. Hence Equations (4) and (5) have the same succession map. Thus Equation (5) provides the almost autonomous interpolation for the integrator. In (4) the vector field rapidly oscillates. The classical averaging theory provides a formula to decrease the time depending term using a sequence of close-to-identity timedependent coordinate changes. It was a nice observation by Neishtadt [21 ] that the classical procedure can be repeated O(e -1) times, which leads to an exponentially small time dependent term. 11 Now we formulate and prove the theorem, and then we discuss some of its consequences. THEOREM 2 (Neishtadt's averaging theorem). Assume that the functions f and g in (4) are analytic in x in a complex neighborhood D + i3. The function g is continuous as a function of all its variables and bounded in e. For all e ~ (0, eo) there is a coordinate change x = y + ePu(y, t/e, E),
u = o(1),
such that in the new variables Equation (4) takes the form -- f (y, ~) + ~P~(y, t/~, ~), where
=O(e f o r some positive constant c. The change of the variables and the new vector field are analytic f o r y ~ D + i~/2. PROOF. We. find the desired change of variables in the form of superposition of a large ( O ( e - I ) ) number of close-to-identity coordinate changes. Each of the changes is obtained using the classical averaging procedure. Let us describe the first step with more details. 12 I I It is remarkable that similar estimates can be proved by similar arguments for a vector-field quasiperiodic in time provided the frequencies satisfy Diophantine condition [24]. 12 Although some estimates may seam to be long, the proof itself is quite elementary.
280
V. Gelfreich
We look for the first coordinate change in the form, X -- ~C -Jr- 8 p+I llO(X, 75, 8),
where 75 =
t/s
(6)
is the fast time. The substitution into Equation (4) gives
x + s p+l Ow 9
Ow =
-~x 2 -+- e P 07:
f(.x+ sP+lw)+
sPg(Yc + sP+lw, 75).
From now on we do not write the explicit dependence on s. Note that, in front of the time derivative of w, one power of s disappeared due to the dependence on rapid time. The equation can be rewritten in the form, -~x
f (~ -+- e P + l w ) -k- e P g ( x -+- e P + l w ' 75) -- e P
Ow) Or
(7) '
where I denotes the unit n x n matrix. Now we choose the function w to kill the dependence on time in the "main order". Let us separate the "average" part of g: 1
(g(x, .))--
f0
g(x, r) d75,
and define w by the equation, Ow (s r) = g(~', r) - ( g ( s 075 '
.)),
which can be solved explicitly
w(s
r) --
fo l"(g(s
(8)
r) -(g(Yc, .)))dr.
The integral defines a periodic function of r, because the zero order Fourier mode of the function under the integral vanishes. In other words, subtracting the average we avoided secular terms. We have defined the coordinate change. Let us write explicit formulas for the pull back of the vector field and obtain the upper bounds. We exclude the time derivative of w from Equation (7) and obtain
x-
(l+sp+lOW - l ~) x
( f ( x + 6P+I 1/3)
+ s p g(Yc + s p+I w,
r) -
s pg(yc, r)
+
sP(g(s .))).
In order to finish the first averaging step we define the new principal autonomous part of the vector field adding the average of g:
Numerics and exponential smallness
281
Let eP~ denote the sum of all other terms from the right-hand-side of the equation:
g' (x' T) -- ( I -f- 6p+l Ow
-1 +
-
+ g(x + ~P+Iw, r) - g(x, "r) Ow - e -Ox ( f ( x ) + eP(g(x, .)))1. Then the function 2~ satisfies an equation of the form (4), where all letters should be equipped by a tilde. Now we describe the domain of the change and get bounds for the new vector field. 13 We have arrived to the place, where the analyticity of the functions plays. We use Cauchy-type estimates 14 for the derivatives. We reduce the domain by a small value ~, which will be chosen later. It will have the same value for all averaging steps. An attempt to "optimize" this choice does not lead to any essential improvement. The domain of the new vector field is D + i ~ with ~ = 6 - ~. It is easy to see from the definition (8) that ]lwllo+i~ ~ 211gllo§ Applying the Cauchy estimate we have 2 ~/-h-
oq~/3 D+i6
IlgllD+i~.
The presence of x/-h-is due to the estimate of the matrix norm via the maximal element of the matrix, S?" ~" Let us assume that ~ satisfies
>14 x/ne :'+t ][gllo+is,
(9)
then
eP+lllWllD+ig ~ ~/(2x/-n)
and
1
003 D+i~
This implies that the coordinate change (6) is well defined, and the following matrix function is bounded:
I + e p+l Ow ) - I Ox
~ 0. The standard arguments (see Appendix A) show
Jgkl(e)[ ,o Fk (WlUc)- Correspondingly, the global stable manifold may be obtained by the iterations of the local stable manifold by the inverse map. A local separatrix is the embedding of the unit disk. Consequently, it has no selfintersections. The map F is a diffeomorphism, and the corresponding global separatrix can not intersect itself. It is easy to see directly from the definition that if the map has two hyperbolic fixed points, their unstable manifolds do not intersect. On the other hand, a priori there is no obstacle for existence of intersections of stable and unstable manifolds. A point of intersection of two invariant manifolds associated with one fixed point is called homoclinic. As both manifolds contain the fixed point x0, this point is excluded when we speak about homoclinic points. A point is heteroclinic, if it belongs to the intersection of separatrices associated with two different fixed points. Now let x0 be a singular (stationary) point of the vector field, f (x0) -- 0. The singular point is called nondegenerate, if all eigenvalues of the matrix D f (xo) are different from zero. The stationary point is a fixed point for the corresponding flow. PROPOSITION 1. If xo is a nondegenerate singular point of the vector field f , then there is eo > O, such that for all e E (0, eO) the integrator has a unique fixed point, xE - Fe(xe), close to the singular point: x~ - xo + O(eP). This proposition is rather standard from classical perturbation theory. It can be proved using the implicit function theorem. The point x0 is a fixed point of the local flow, x0 = q~e (x0). The matrix Dq~ e (x0) is invertible due to the nondegeneracy of the fixed point, although its eigenvalues are e-close to zero. Then the equation, xe = F~(xe) = ~ (xe) + O(e p+l ) has a solution, xe = x0 + O(eP), due to the implicit function theorem. Singular points of the vector field can be classified according to the eigenvalues of the matrix D f (xo) too. One special class is of special interest for us. A singular point is called 17 If the map F is not globally defined, and, consequently, the dynamics is not global, one should be careful with this definition.
Numerics and exponential smallness
289
hyperbolic, if the eigenvalues do not belong to the imaginary axis. If the vector field has a hyperbolic singular point, then it is a hyperbolic fixed point of the flow, and the integrator has a hyperbolic fixed point nearby. It is well known that the local separatrices are persistent with respect to small perturbations. In particular, the local separatrices of the integrator are e P-close to the separatrices of the differential equation (see, e.g., [7]). In the following we will mainly study integrators of differential equations on the plane (n = 2). We will call a point on the plane a saddle, if in the linear approximation it has one stable and one unstable directions.
7. Splitting of complex separatrices In the analytical case the geometry of the phase space can determine the separatrices splitting for all hyperbolic saddle points. Let a diffeomorphism have an analytic continuation up to an entire diffeomorphism F" C 2 --+ C 2. Let x l and x2 denote two hyperbolic saddle points, X l -- F (x l) and x2 -F (x2). We do not exclude the case x l = x2. According to the Hadamard-Perron theorem these points have one (complex) dimensional invariant manifolds. It is possible that the intersection W s (x l) A W u (x2) contains a point different from x l and x2. This heteroclinic (or homoclinic) point has to be one of the following types: (1) transversal heteroclinic (homoclinic) point; (2) point of finite order tangency; (3) point of infinite order tangency. We say that the separatrices are split if their intersection contains no points of infinite order tangency. If the separatrices split it is possible that they have no intersections at all, or there is a point of transversal intersection, or there is a point of finite-order tangency. In the last case the tangency may be of odd or even order. THEOREM 4 (Ushiki [27]). All separatrices o f all hyperbolic saddle points o f an entire diffeomorphism F" C 2 --+ C 2 are split. We formulate a nice geometrical corollary before proving this theorem. Let F" R 2 --+ ~2 be an analytic diffeomorphism. We say that the diffeomorphism F has a heteroclinic (homoclinic) connection, if there is a continuous invariant curve, whose ends are saddle points of F. We additionally require that all internal points of the curve are not fixed points for F. COROLLARY 5. If a real-analytic diffeomorphism F has an entire analytic continuation, F'" C 2 --+ C 2, then it has no homoclinic and no heteroclinic connections at all.
EXERCISE. Derive this corollary from the theorem. Hint: show that the heteroclinic (homoclinic) connection 1 is a subset of W S(xl) A W" (x2). The separatrices are one (complex) dimensional analytic curves, which intersect along one real dimension, so they also intersect along one complex dimension, i.e., each internal point of I is a point of infinite order tangency.
290
V. Gelfreich
PROOF OF THEOREM 4. The theorem is proved by contradiction. The stable (unstable) separatrix is the image of an entire map ~os(u)" C ~ C 2. We suppose that the intersection W s ( x 1) N W u (x2) contains a point of infinite order tangency. The supposition allows us to show that the union of separatrices W s ( x l) U W u (x2) is an analytic image of a Riemann sphere. Since the Riemann sphere is compact the union of separatrices is bounded. Then the entire map q9s is bounded, thus it is constant. Since its image is W s (x l) we obtain the contradiction. Let us implement this program. In Appendix D it is shown that the stable and unstable separatrices are images of the entire maps, q9s" C --+ C 2 and q9u" C ~ C 2. In particular, W s ( x l) - - q9s (C) and W u (x2) - q9u (C). These maps are one-to-one maps of C onto their images, and they are normalized in such a way that the images of the origin are the fixed points, Xl -- ~0s (0), x2 - q9u (0). Let U, V C C be the preimages of the set of all points of infinite order tangency of W s ( x l) and W u (x2) with respect to ~0s and q9~', respectively. The sets U and V are not empty due to the supposition. The analytic curves coincide in a neighborhood of a point of infinite order tangency, so the sets U and V are open. We can define an analytic diffeomorphism, h" U --+ V, by h - - ( ~ o U l v ) - J o (~oSlu). Now, we take two copies of the complex plane C and glue them by the diffeomorphism, h. The result is a one (complex) dimensional manifold, which we denote by M. This manifold is defined by two charts and the passage map, h. The functions q9s and ~p~ define in these charts a map, 7r" M --+ C 2, ~p(M) -- W s ( x l ) U W " (X2). This map is analytic (and continuous, of course). The first copy of the complex plane is embedded in M, but its image does not coincide with the whole manifold M since it does not contain the zero from the second copy of the complex plane: this point corresponds to x2, which is a saddle point and not a point of infinite order tangency. The manifold M is obviously connected. By the Koebe classification theorem its universal covering M is analytically isomorphic either to the unit disk, either to the complex plane, or to the Riemann sphe~. Since there is a (proper) subset of M, which is isomorphic to the whole complex plane, M is isomorphic to the Riemann surface. Consequently, M is compact. We can lift the map ~p onto the universal covering, M. The lifted map 7t defines an analytic map of M in C 2. The image is compact as it is an image of a compact set. On the other hand, the image coincides with the union, W s (x l) U W" (x2). Consequently, the union of separatrices is bounded. Each of the separatrices is the image of the entire map, q9T M C ~ C 2. It follows that each component of each of the maps is an entire bounded function, i.e., these maps are constant. This is the desired contradiction, because the separatrices consist of more than one point. D REMARK 6. The generalization of the theorem to the case when F is a diffeomorphism of C n and the invariant stable and unstable manifolds are one-dimensional is almost evident. This theorem has some interesting consequences for integrators. For example, let the original system of differential equations be a Hamiltonian system on the plane. Let this
Numerics and exponential smallness
291
system have a saddle point and a homoclinic connection. The flow preserves the Hamiltonian function H. Let the integrator Fe have an entire analytic continuation (like in the example of Section 1). According to the theorem if the integrator has a homoclinic point, then this point is either transversal or finite order tangency. This is not compatible with existence of an analytic integral of motion (a nice elementary proof can be found in [6]). Consequently, an entire integrator of a plane Hamiltonian vector field has either nor integral of motion or nor homoclinic connections. For a symplectic integrator only the first alternative is possible, since the separatrices have to intersect due to the area-preservation property. EXAMPLE. This example shows that the conditions of complex analyticity is essential. There is an integrable integrator of the pendulum equation, Y - sin x, which has the form, Xk+l -- 2Xk + Xk-1 -- 82f(Xk, 82),
f (x, r
2
__ ~
arctan
e 2 sin x 2 - 62 COSx '
found by Suris [26]. The integral is known explicitly. The function 8
2
I (xk, xk-1, e 2) -- 1 - cos(xk - xk-1) + -~- (cos xk + cos xk-1) is constant along a numerical trajectory. The second component of a trajectory may be recovered by yk = (xk - X k - 1 ) / 6 . Then the integrator, Fe :(xk, Yk) ~ (xk+l, Yk+l), is symplectic (it preserves area). Unlike the integrator described in Section 1 it has a homoclinic connection, which converges to the pendulum separatrix when e --+ 0. Indeed, the integrator separatrix is not split, since it belongs to the set defined by i(x,
x -
= ,(0,
o,
-
It is easily seen from the explicit formula that
,,xx This example does not contradict to the theorem, because the analytical continuation of Fe is not entire. In fact, integrable integrators of integrable Hamiltonian systems are difficult to find, and they are known only as rare exceptions.
8. Exponential smallness of the splitting We consider an autonomous system of differential equations on the plane:
.;c=f(x),
xr
2,
(19)
V. Gelfreich
292
with the vector field analytic in a complex neighborhood, D + if 6 C 2. We assume that the system has a hyperbolic saddle, x0 E D, and there is a homoclinic trajectory o-(t) which forms a homoclinic connection to x0: l i m t ~ + ~ or(t) = x0. Since the vector field is analytic the homoclinic trajectory is also analytic and its domain contains a closed complex strip, /Tp-{t
~ C" IImtl ~ 0. An analytic integrator Fe has a saddle fixed point, xs = xo + O(sP). Its local separatrices are close to the separatrix of the differential equation. But it is quite possible that they form no homoclinic connection, i.e., they can split. In general the integrator Fe may have no homoclinic orbits at all. On the other hand, in many cases one can show that it has homoclinic trajectories due to preservation of the area or due to a symmetry. The whiskers of the integrator separatrices can be represented in parametric form (see Appendix D) by the solutions of the finite difference-equation, +
supplied with the boundary conditions lim cr~ (t) = x0
t---~ -~x~
and
lim cr+ (t) -- x0.
t---~ +cx~
These conditions do not uniquely define the solutions. It is possible to show that the parameterizations can be chosen close to the homoclinic trajectory of the differential equation in such a way that -
+
o-+ (t) - o- t) +
t e l 7 p , Ret < R , teFlp, Ret > -R,
for any fixed R > 0. The constants in the O-estimates depend on R, of course. How one can measure the splitting of separatrices? There are many alternative ways. For example, we can take a point cr (t) on the separatrix of the differential equation and erect a normal from it. Then the splitting distance d(t) is the distance between first intersections of the stable and unstable separatrices with the normal. Here "first" refers to an intersection closest to the fixed point inside the separatrix. Let us assume that for all s E (0, s0) the integrator Fs has a primary homoclinic point Xh, i.e., a point of the "first" intersection of the separatrix segments, { a - ( t ) : t < R} and {tr + (t): t > - R } . The primary homoclinic orbit is close to the separatrix of the differential equation: there is to 6 [ - R , R], such that Ff(xh) = tr(ks + to) + O(s p) for all integer k. THEOREM 6. Let R > O. Let cr(Flp) C D + if and let the integrator Fs be analytic in D + if. If Fs has a primary homoclinic orbit for all s E (0, so), then the splitting distance
Numerics and exponential smallness
293
d(t) is exponentially small, d(t) - O ( e -2rrp/s) for all - R < t < R. The constant in the O-estimate depends on R and eo. In fact, the method, the basic ideas of which we explain later in this section, affords to estimate other characteristics of the splitting, such as areas of lobes formed by segments of split separatrices, or angles formed by the separatrices at a homoclinic point, or even describe how one separatrix oscillates near the second one. The most complete geometrical information may be obtained from the following theorem. THEOREM 7. Under the conditions of Theorem 6, there is an analytic system of coordinates (T, E), defined in an e-independentneighborhood of{or(t): - R < t < R}, such that in the new coordinates the following hold. (1) The integrator Fs takes the form of the translation, (T, E) w-~ (T + s, E); (2) The unstable separatrix is given by E = 0; (3) The stable separatrix is the graph of an s-periodic function 2zrT E = Oo(s) + O1 (s) sin ~ -l- O(e-4rrp/s),
where the coefficients, IO0(e)l, IOl (E)I = O(e-2Jrp/s), are exponentially small. (4) The coordinate change is bounded uniformly in s E (0, eo). REMARK 7. The constants Oo(S) and Ol (e) can vanish, and generally speaking the theorem provides only the upper bound for the splitting. For a class of examples it is possible to improve the method to estimate values of these constants and in this way to prove the transversality of the splitting. One special case is the standard map studied in the next section. REMARK 8. The theorem may be applied to an entire integrator of an entire vector field. In this case or(t) has complex singularities. 18 Let p0 be the distance from the real axis to the closest singularity of cr (t). Then the above theorems hold for any p < P0.
PROOF. 19 The idea of the proof is quite simple: in the (discrete) flow box coordinates any invariant object of the integrator is represented by an e-periodic pattern. The domain of the flow box coordinates is s-independent. This affords to describe the difference of two separatrices by an s-periodic function, which is analytic in an s-independent complex strip. The analysis of its Fourier series (see Appendix A) shows that the Fourier coefficients of all orders, except zero, are exponentially small. In fact, the function is almost sinusoidal. 18 If it was entire, we could use arguments of Section 7 to show nonexistence of homoclinic connection. 19 The proof is based on the ideas first formulated by Lazutkin [19]. A first general exponentially small upper bound for the splitting for close-to-identity maps was obtained by Fontich and Sire6 [8] in a closely related way.
294
V. Gelfreich
The larger is the domain of the flow box coordinates, the sharper are upper bounds. Because of that, we use special coordinates (T, E) instead of the flow-box coordinates of Section 5. The only essential difference is the larger domain, which includes an s-independent neighborhood of the set ~ (Hp) C C 2. The construction of these nonlocal flow box coordinates can be found in [10]. It is similar to the proof of Theorem 3. In the construction of this coordinate system, the complex time t defined on the separatrix of the differential equation, is used as a first order approximation of the first coordinate T. Because of this and the closeness of the integrator separatrix to o-, the domain of the coordinates (T, E) includes an s-independent neighborhood of the sets, {~r~(t)" IRet[ ~< R, IImtl ~< p}. The coordinate change can be normalized by the condition that on E -- 0 the coordinate T coincides with the parameter t on the unstable separatrix o--(t). Then the stable separatrix can be represented in the parametric form, (T, E) -- (t + ~ ( t ) , O(t)), where by definition (t) -- T (o-+ (t)) - t,
(20)
O)(t) - E(cr+ (t)).
These function are s-periodic. Indeed, O ( t + e) -- E ( c r + ( t + e)) -- E ( F s ( a + ( t ) ) )
-- E ( a + ( t ) )
-- O ( t ) ,
(t + 6) = T (~r+ ( t + e)) - t - s = T(Fs(a+(t)))
-t-
s -- T ( a + ( t ) )
-t--
~(t),
where we used that the integrator takes the form of the translation: E o Fs -- E and T o Fs -T + s. Moreover, these functions are analytic in the strip H p . Consequently, we can apply the lemma on Fourier coefficients (Lemma 1), which gives the estimate O ( t ) -- O0(s) + Ol (s) sin
2zc(t -- tl (S))
+ O(e-4Jrpls),
6
(t) -- q:0 (s) + O(e-2JrP/e), where the subscripts refer to the order of Fourier modes. These estimates can be differentiated with respect to s, the error being multiplied by s -1 . Moreover, [O)1 (s) I ~< const 9e -2Jrp/s. The lemma on Fourier coefficients provides an exponentially small upper bound for all Fourier modes except the zero order term. In general, this term can be of the order of O ( 6 P ) , then the separatrices do not have primary homoclinic intersections, which correspond to zeroes of the function 6).
Numerics and exponential smallness
295
We assume the existence of the primary homoclinics, then the function O has zeroes. This implies that 169o1 does not exceed the sum of all other Fourier terms (by modulus), otherwise 69 would have no zeros. That is, it is exponentially small. Then we use the implicit function theorem to show that the stable separatrix is actually a graph, to see it we exclude t using the first of Equations (20). Finally, we translate the coordinate system in T-direction in order to kill the possible phase shift in the sinus function. D
9. Lower bounds for the splitting How sharp are the upper bounds of the previous section? They seems to be optimal, but proving this claim is an extremely difficult problem. There is a set of examples, most of which are polynomial, where lower bounds are available. The longest list can be found in the paper [15]. As an example we consider the standard map, already defined in Section 1. Let us describe the splitting of separatrices for the standard map with more details. The standard map has the form, Fe :(x, y) ~ (x l, Yl), where x l -- x + eyl, y m -- Y + e s i n x . It is a symplectic integrator of the pendulum equation. For small positive e > 0 the standard map has two fixed points, namely, (0, 0) and (0, Jr). The first one is hyperbolic and the other one is elliptic. Indeed, the matrix of the linear part at the origin is (1+~
1) 1 '
and its eigenvalues are X and ) - l , where
)~- 1 + e/2 + / ~
+ e2/4.
The stable W s and the unstable W" manifolds of this fixed point are analytic curves passing through (0, 0), the eigenvectors of the matrix being tangent vectors to these curves at (0, 0). The origin breaks each separatrix into two parts. We denote by W~ (WI') the upper part of the stable (unstable) separatrix. It is convenient to represent the unstable separatrix W I' in a parametric form using a solution (x, y ) = ( x - ( t ) , y - ( t ) ) of the finite-difference system,
x(t + e) - - x ( t ) -+-ey(t + e), y(t + e) -- y(t) + ~ sinx(t).
(21)
V. Gelfreich
296
~0
Fig. 8. Separatrix splitting for the standard map.
We impose the following boundary conditions on the function x - ( t ) " lim x - (t) - 0,
t-+-~
x - (0) - 7r.
(22)
The solution of Equation (21) is not defined uniquely by the boundary conditions (22). We study the solution, whose analytic continuation is entire and has a purely imaginary period 2zri. We assume that t = 0 corresponds to the first intersection of W~~ with the line x -- Jr (if the intersection of the stable and unstable separatrices is transversal, then there are infinitely many such intersections). Under these additional assumptions the solution of the problem (21) and (22) is unique. Originally, the solution of (21) is only defined in a complex half-plane Re t < - R and represents the local separatrix. Since the sine function is entire, iterations of Equation (21) allow to continue the solution up to an entire function. As in some other places we omit the explicit dependence of the functions x - , y - , x +, and y+ on e to shorten the notations. We define the parameterization of Wi~ by
(x+(t), y+(t)) -- (2zr - x - ( - t ) , y - ( - t ) + e s i n x - ( - t ) ) . Direct substitution shows that these functions satisfy the system (2 l) as well as the boundary conditions, lim x + (t) -- 0,
t---+-+-~
x + (0) -- Jr.
(23)
Since x - ( 0 ) = Jr we have x + (0) = Jr and y+ (0) = y - ( 0 ) that is t = 0 corresponds to a homoclinic point. Both parameterizations are close to the homoclinic solution of the pendulum equation, which is known explicitly: cr0(t) -- (4 arctane t, 2 / c o s h t ) , The complex time singularities of this separatrix, closest to the real axis, are at +i7r/2. They play an exceptional role in the estimates of the splitting.
Numerics and exponential smallness
297
Since the standard map has an analytic continuation up to a diffeomorphism of C 2, the homoclinic point is either finite order tangency or transversal. On the other hand, the estimates of the previous sections show that the splitting is exponentially small, namely, it is O(e -2~rp/E) for any constant/9 6 (0, re/2). We will see that the constant in the exponent is arbitrarily close to the optimal value. The splitting angle is not a natural measure for the separatrices splitting. V.E Lazutkin proposed to study the homoclinic invariant defined by o9 _ det ( . f - ( 0 ) ~-(0)
.f+(0) ) ~ +(0) "
(24)
The homoclinic invariant is equal to the value of the symplectic form d x / ~ dy on a pair of vectors tangent to the separatrices at the homoclinic point. The coordinate-independent definition of the homoclinic invariant for a symplectic map on a symplectic two-dimensional manifold may be found in [ 14]. The homoclinic invariant has two remarkable properties: (i) it has the same value for all points of one homoclinic trajectory; (ii) it is invariant with respect to symplectic coordinate changes. THEOREM 8. The homoclinic invariant co o f the primary homoclinic point, z o - ( x - (0), y - (0)), equals
O9=-_
47r o9o _jr2/s 83
e
(1 + 0(o~
The coefficient, o)0 -- 1118.827706 .... was computed in [20] as a solution of an sindependent problem. COROLLARY 9. For all sufficiently small s > 0 the stable and unstable separatrices of the standard map intersect transversally at the homoclinic point zo (the first intersection o f the separatrices with the line x -- re), and the splitting angle is given by rr o9o _ rr2/ s
se
+
The lobe area is given by
2o9o 2/~ S--~e -~ (1+0(8)). ~8
The formula for the splitting angle was first obtained by Lazutkin [19]. The original proof was based on a detailed study of the analytic continuation of the function O(T) (see the previous section). Lazutkin's proof was not complete. A complete and self-contained proof of the formulas for the splitting of separatrices for the standard map can be found in [11].
298
V. Gelfreich
10. Splitting of separatrices near resonant periodic orbits Now we are going to deviate a bit from the mainstream of our chapter and discuss recent results on generic bifurcations of periodic orbits in a Hamiltonian system with two degrees of freedom. It is remarkable that almost all the methods and general results of the present chapter can be successfully applied to this problem [13,12]. We consider an analytic family of area-preserving maps Fe with an elliptic fixed point. We assume that for E = 0 the fixed point is resonant of an order n = 1,2 or 3. In each of these cases the fixed point can be unstable at the exact resonance, and close to the exact resonance there is a hyperbolic periodic orbit of period n. The resonant normal form is integrable and its separatrices form a small loop. Separatrices of the map F~ are close to the separatrices of the normal form but can intersect transversally. In particular Neishtadt averaging theorem and theorems from Section 8 imply an exponentially small upper bound for the splitting of separatrices. In this section we describe asymptotic formulae for the splitting of separatrices, which in particular imply lower bounds for the splitting in a generic situation. The splitting is exponentially small compared to E and can not be detected by Melnikov method. This problem is equivalent to studying a generic family of close-to-resonant elliptic periodic orbits in an analytic Hamiltonian system with two degrees of freedom. Indeed in a Hamiltonian system closed orbits are not isolated but form one-parametric families. As a rule, nearby members of the family belong to different energy levels. Here we consider an analytic Hamiltonian system with two degrees of freedom only. In such a system small oscillations about a family of closed orbits can be described by a time-periodic system with one degree of freedom which depends on a parameter. Let a periodic orbits be of elliptic type. It has a complex multiplicator # with I#1 = 1. We say that the periodic orbit is resonant if #" = 1 for some integer n. We take the smallest positive n to be the order of the resonance. The motion near the resonant periodic orbit can be described using a resonant normal form. The resonant normal form can be reduced to an autonomous system with one degree of freedom and its phase portrait can be drawn. If coefficients of the lowest-order terms in the normal form are in general position, then there are only finitely many different types of phase portraits [2]. The resonances of the order n = 1, 2, 3, and 4 have a special property: the linearly stable periodic orbit may become unstable at exact resonance. At resonance of the order n = 1 or 3 the elliptic periodic orbit is generically unstable. At resonance of the order n = 2 or 4 both stable and unstable cases are possible in general position depending on coefficients of the resonant normal form. Let us consider the problem with more details. It is more convenient to consider an equivalent problem formulated in terms of families of area-preserving maps, which are obtained by considering Poincar6 section near the closed orbits. Let Fe denote an one-parametric analytic family of area-preserving maps. Assume that there is a family of elliptic fixed points pe with a (complex) multiplicator #~, I#~1 = 1. Let /z 0n _ 1, we say that P0 is resonant. Here we study the resonances of the order n - 1,2, and 3. The case n = 4 has some special properties and it is considered. In a small neighborhood of its fixed point the nth iterate F n can be considered as a time-one map of an autonomous Hamiltonian system with one degree of freedom with an
Numerics and exponential smallness
299
5>0
5=0
5 0).
error, which is smaller than any power of s [2]. It is possible to simplify the form of the corresponding Hamiltonian by a canonical transformation. In this way the system is transformed to a resonant normal form. The lower order normal form Hamiltonian H,, depends on 2 parameters: 3 describes deviation from the exact resonance (and it is proportional to a power of s), and A depends on the map F0 only. It is not too difficult to provide an explicit formula for A and 3 as a function of several first coefficients of the Taylor series of F~ in two space variables and s. These formulae are not of big importance for our present purposes since we will formulate our results in terms of quantities, which allow coordinate independent definitions. The phase portraits and the main order terms of the normal forms are given on Figures 9 and 10. This is a complete list of non-degenerate cases for resonances of the order n = 1,2, and 3 [2].
V. Gelfreich
300
c~0
X4
A>0
Fig. 10. Resonant normal form.
The phase portrait of the map Fe looks quite similar to its normal form, but still some explanations are necessary. In the cases n = 1 and 2 the elliptic fixed point pe exists only on one side of the resonance. Exactly at resonance the multiplicator of P0 is real ( + 1, respectively), and the fixed point is not elliptic but parabolic. In the case n = 1 shown on Figure 9 a the elliptic fixed point collides with a hyperbolic fixed point and disappear. This corresponds to a Hamiltonian saddle-center (BogdanovTackens) bifurcation. In the case n -- 2 we see a pitch-fork period doubling bifurcation. There are two possibilities: (a) (Figure 9(b)) the elliptic fixed point collides with a hyperbolic period-two trajectory, after that it becomes hyperbolic and the period-two trajectory disappears; (b) (Figure 10) the elliptic fixed point becomes hyperbolic and a period two elliptic trajectory arises. In the case n -- 3 (see Figure 9(c)) the elliptic fixed point exists on both sides of the resonance. At the resonance it collides with a period 3 hyperbolic periodic orbit. In each of these cases separatrices of the normal form make a small loop around the elliptic equilibrium. At any order the resonant normal form is integrable, and the corresponding stable and unstable separatrices coincide. This is not generically true for the map Fe - as it was already pointed in [2] - the separatrices of the map may intersect transversally. Detecting this is a very difficult analytical problem since in the analytical case the splitting of separatrices is exponentially small in e. Before providing the asymptotic formulae, which describe the splitting of the separatrices, we need in some preliminary definitions. There are many different ways in which one may quantitatively describe the separatrices splitting. We prefer Lazutkin homoclinic invariant, which is defined as a straightforward generalization of (24). Let the separatrices of the hyperbolic n-periodic orbit be parameterized by solutions of the following finite-difference equation ~ + ( t + h) - F n (~p+(t)),
~ + ( t ) ---->x~
as t --+ +oo,
where xe is one of the n points of the hyperbolic periodic trajectory. The " + " corresponds to the stable separatrix and the " - " to the unstable one. We let h -- log Xe and assume that
Numerics and exponential smallness
301
the multiplicator of the hyperbolic periodic orbit )~e > 1. The image ~ + (R) is one whisker of the separatrix. Under an additional condition (27ri periodicity in t) these solutions are unique up to a substitution t ~ t + const. The derivative ~+(t) - d g r + / d t ( t ) defines a vector field tangent to the stable and unstable separatrices, respectively. These vector fields are Fn-invariant. It is easy to see that the vector fields are independent from the choice of the normalization constant in the definition of gr +. Let Xh denote a homoclinic point. Then Lazutkin homoclinic invariant, co'--e_
Ae+,
equals to the area of a parallelogram defined by the tangent vectors ~_ and ~+ at xh. Lazutkin homoclinic invariant has remarkable properties: (1) it takes the same value for all points of the homoclinic trajectory of Xh; (2) it is invariant with respect to canonical substitutions; (3) for a fixed Xh it is proportional to the sine of the splitting angle. We have chosen the homoclinic invariant in order to describe the splitting by one invariantly defined number, which is easy to compute with high precision. This permits a careful comparison of the theory with results of numerical experiments. Of course, inside the proofs there are expressions, which describe the behavior of the separatrices as curves, i.e., much detailed description of the separatrices is also possible by the same method. The main result of the present section is the following asymptotic formula for the Lazutkin homoclinic invariant. Let the map Fc afford one of the nondegenerate resonant normal forms shown on Figure 9. Assume e be sufficiently small, then Fe has exactly one n-periodic hyperbolic trajectory in a neighborhood of pe (only on one side of the resonance if n - 1 or 2). Separatrices of the hyperbolic periodic trajectory form a small loop around pe. There are at least two different primary homoclinic orbits. The homoclinic invariant of one primary homoclinic orbit is given asymptotically by
4re e _2rre/h (iOl co-- ~-5-
+ O(h)),
(25)
where h = log)~c, )~e is the multiplicator of the hyperbolic periodic orbit. It vanishes together with e, so the splitting is exponentially small compared to e. The preexponential factor 1691 is a constant, which depends on the map at the moment of the resonance only. If 69 does not vanish there are exactly two primary homoclinic orbits with different orientation of intersection of separatrices, and both of them are transversal. A similar statement is valid if the map Fc has the resonant normal form shown on Figure 10, but the asymptotic formula for the homoclinic invariant has to be replaced by: co-- 47r ~5- e _~r2/h
(IOI-+- O(h)),
(26)
where h - log )2, )~e < _ 1 is the multiplicator of the hyperbolic fixed point, which appears after the bifurcation. The only difference compared to the previous case is in the exponent. An important ingredient of the asymptotic formulae is the constant 69. The asymptotic formulae above imply transversality of the separatrices for small e only provided 69 does
V. Gelfreich
302
not vanish. This constant can be defined as a symplectic invariant associated with the corresponding map F0. The constant 69 can vanish. For example, if the map F0 is time one map of the corresponding normal form, or if F0 is integrable. Numerical experiments show that 69 may vanish in a nonintegrable case too. We conjecture, that for any map F0, any 69o E C and any natural N there is another map F0, which have the same Taylor expansion as F0 up to the order N and 69 (F0) -- 69o. In other words, the constant 69 is not defined by any final jet of the function F0. On the other hand there are efficient numerical method for its evaluation [20,16]. In some cases it is possible to prove analytically that 69 does not vanish [ 16], making in this way the proof of transversality of separatrices purely analytical even for concrete families and not only in generic sense. If the map FE has additional symmetries its separatrix splitting can be much smaller compared to the above-described general case. For example, consider n = 2 and let the map Fe be odd. Then the constant to(F0) = 0 due to the symmetry, and the splitting of separatrices is essentially smaller compare to the general non-odd case. Nevertheless an asymptotic formula for the splitting of separatrices can be derived by the same method for this case too. Instead of F~ we have to consider an auxiliary map G~ = - F ~ . Note that G~ = F~, so the separatrices of these two maps coincide. The corresponding statements and asymptotic asymptotic formula (26) remain valid for Ge if we use h = l o g ( - ) ~ ) . Note that the multiplicator of the hyperbolic fixed point of G~ equals to -~.e. Thus the new h is a half of the corresponding value for Fe, and the order of the splitting is much smaller (approximately square of the general case); moreover if t0(G0) # 0 then the map Fe has Exactly 4 different primary homoclinic orbits.
Definition of 69. We give a short description of a problem, which leads to the definition of the splitting constant 69. We consider the finite-difference equation
(27)
This system has a formal solution in class of formal series in powers of r - l . It is defined up to a translation r ~ r + r0 with r0 E •. The equation has two analytic solution (u+(r), v+(r)), which are asymptotic to the single formal solution as r --+ 4 - ~ , respectively. We consider their analytical continuation on complex r. They have the same asymptotic behavior as Im r --+ - c ~ . Moreover, their difference decreases exponentially as Im r --+ -cx~. The constant 69 is defined as the following limit
--
,im e2iTdet( "+")
Im r - + - e ~
~
(r).
(28)
V+ -- V -
It is not difficult to check that 1691 is a symplectic invariant of the map F0 - its definition is invariant with respect to area-preserving changes of coordinates.
303
Numerics and exponential smallness
11. Conclusion Many ideas described in this chapter comes back to the works by Poincar6 [23], who discovered the splitting of separatrices, including exponentially small splitting. 2~ H. Poincar6 also discovered the relation between dynamics of differential equations and maps. The perspectives are also related to his discoveries. There are a lot of nice open problems left: What happens in many dimensional systems? Can a numerical method induce Arnold diffusion in a system? How many trajectories (in measure sense) become chaotic? These and many other problems are waiting for a solution.
Appendix A: Fourier modes of analytic functions It is well known that the decay speed of Fourier modes is closely related to the smoothness of a functions. A domain of a periodic real-analytic function always contains a complex strip. The ratio of the strip width to the period determines the decay speed of Fourier modes. LEMMA 1 (on Fourier coefficients). If an h-periodic function 0 is analytic and bounded in the strip {t E C: I Imtl < b}, then its Fourier coefficients are bounded in the following way: [Okl ~ e -2zrblkl/h
sup Io~t~l f o r all k E Z. Ilmtl~ h and that the mean value of O vanishes, then f o r all real t ~ I~:
Io 0) or down (if k < 0), and we have
Ok
--
I f -+-ib+he -2rrkit/hf( t ) h- J q-ib
dt
--
l for7e-2Zrkir
20 Somedetails about the history of this discoverycan be found in the book [4].
f (~"_4_ib) ds
304
V. Gelfreich
The modulus of the integral is bounded by the product of the length of the path times the maximum of the modulus of the function under the integral:
I O k l - e -2rrblkl/h
If(t) l,
sup IImtl--b
which is the desired estimate for the Fourier coefficients.
D
To prove the corollary, we note that for t E IR oo
Io(,)l
oo
E
k=-oc
e-2zrb /h
k=l
2e-2rrb/ h
1
-
e -2rcb/h
sup
If(')l
sup IImtl~ O, there exists a 6 > 0 such that if II.T'(P:v)[I- IIE~ -011 < ~, then there is a fixed point X ~ of ~ such that ]lPor - S o c l ] Ilbt--l(Eor -- f - l ( 0 ) l ] < e. In this suggestive notation, we can identify f" and E ~ as extensions of the error function F and the error vector E, respectively. In addition, this formulation also makes it plain that 9t-- 1 is continuous, and thus the ~-pseudo-trajectory Por is continuously shadowable. The key in showing that the pseudo-trajectory is continuously-shadowable is the use of the implicit function theorem in the form given in Ref. [22]. Before we can apply the theorem, certain conditions need to be satisfied, namely, we need to show that I I O ~ ( Y ~ ) l l c IIIIIc -- 1, and thus IID~IIc and II[D~] -111c are bounded below by K - 1 . ) If we let p = rl/K 2 and o- -- 0 / K and if the above conditions are satisfied, then the implicit function theorem guarantees the existence of a domain s with B p ( P ~ ) C s C B,I(Por such that .T" is oneto-one on s Furthermore, B,~(.T'(P~)) -- B ~ ( E ~ ) C f(s (please refer to Figure 1). In particular, a proper choice of r/(which depends on e) will imply 0 6 B~ (Eor which means there is a unique true trajectory X ~ E s such that .T'(Xor - 0 . Moreover, the choice of 7/is such that II P ~ - x ~ II < rl ~< e. Thus, we have an e-shadowing trajectory. In particular, the implicit function theorem ensures the continuity of f - - I on B~ (Ecr This means that pseudo-trajectories (including P ~ ) in a small neighborhood of X ~ are continuously shadowed by the same true trajectory, namely X ~ . Recall that we cannot apply the theorem until we have shown that the derivative Dr" and its inverse [D.T']-l are bounded. This is where hyperbolicity comes in. Using conditions (i) and (ii) in the definition of hyperbolicity, one can show that the above values are bounded (see [28] for more details).
C. Grebogi et al.
320
F
F-1
F(~) Bo(P~o) Fig. 1. A schematic diagram depicting continuous shadowability.
2.3. Shadowing in nonhyperbolic systems While the shadowing lemma is a very important result, it is not widely applicable because most dynamical systems of interest are not hyperbolic. Furthermore, it is a prerequisite of the shadowing lemma that the pseudo-trajectory be in the hyperbolic invariant set A, but this is generally not the case when A has a fractal measure with respect to the Lebesgue measure. Motivated by these limitations, recent studies [9,18,21,32-34] have concentrated on computer-assisted proofs of the existence of finite-length shadowing trajectories for nonhyperbolic systems. One in particular, [34], was able to formulate a shadowing theorem which states that if certain quantities evaluated at points of the pseudo-trajectory are bounded, then there exists a true trajectory near the pseudo-trajectory. It should be noted that the shadowing lemma for hyperbolic maps follows as a corollary to the above generalized shadowing theorem. Furthermore, a key technique used in the proof is a method of reducing the noise in the pseudo-trajectory, thus generating a less noisy trajectory. This method, which was first introduced in [18,21], is called the refinement method (see Section 3.2 for more details). It was shown in [34] that repeated application of the refinement method will theoretically converge to a true trajectory near the original pseudo-trajectory. In showing that a finite-length pseudo-trajectory is shadowable, one is essentially showing that the pseudo-trajectory is sufficiently close to being hyperbolic, and thus continuously shadowable. To do this, we let Sn and Un denote complementary subspaces of the tangent space ~;~O N at each point Pn of a pseudo-trajectory {p,, }n=0, that is, Sn -q- Un - ]l~m for n = 0 . . . . . N. Assume that the Sn are consistent in the sense that the linearized dynamical system maps Sn to Sn+l within the truncation size 6, and the same for Un. A suitable choice of Sn and Un is to have them approximate the stable and unstable directions of Pn at each n, respectively. They do not need to have any relation to exact global stable and unstable manifolds, and in fact since the system may not be hyperbolic, these manifolds may not exist. The angle On
Shadowability of chaotic dynamical systems
321
between the subspaces [ 1] is defined implicitly by COS On " -
max 13T w , vESn, tUEUn
where v 3: denotes the transpose of v. The quantities which need to be measured to assure the existence of a nearby true trajectory depends on the angle 0,7 in the form of csc 0,,. Thus, if 0,7 is bounded away from zero, then the relevant quantities will have bounded magnitude, and there is a true trajectory near the pseudo-trajectory.
2.4. Glitches Shadowing would fail if the trajectory encounters regions of nonhyperbolicity. Failures of pseudo-trajectories to be continuously-shadowable are called "glitches" [ 14,18,21 ]. We say that a pseudo-trajectory has a glitch at point n if {Pi }tiz=0 can be continuously shadowed, but {pi }iz__+~ cannot. A schematic representation of one type of glitch is shown in Figure 2. Assume that q is a fixed point of the iteration. Assume that the pseudo-trajectory has no error until n, when error pushes p,7 across the stable manifold of q. True trajectories follow the unstable manifold of P,7-1, which separates exponentially from the trajectory located across the stable manifold of q, so that no continuous shadowing trajectory can exist. A second type of glitch can occur when the number of stable directions is not constant along the trajectory, making hyperbolic structures impossible. This can happen when the periodic points embedded in the chaotic attractor have varying numbers of stable eigendirections. If a trajectory spends arbitrary length of times near each of these periodic points,
stable manifold unstable manifold _
lr
oP~ _
V
Fig. 2. A near-tangency from a nonhyperbolic system. A small error in the computation of f (p,_ 1) can push p, across a stable manifold, resulting in a glitch.
322
C. Grebogi et al.
calculation of the finite-time Lyapunov exponents would yield varying number of positive Lyapunov exponents depending on which finite segment of the trajectory was used. This leads to at least one Lyapunov exponent that fluctuates about zero. The manner in which this fluctuation results in unshadowable pseudo-trajectories is nicely demonstrated in a theoretical model studied by Abraham and Smale [1] in 1970. In their example, there is an invariant set containing two fixed points. Let q l denote the fixed point with a single local expanding direction, and q2 the fixed point with a two-dimensional local expanding set. Typical trajectories wandering through the invariant set spend arbitrarily long times near each of the fixed points. The second largest Lyapunov exponent of such a trajectory is positive for trajectory segments near q2, and is negative for trajectory segments near q l, so this exponent fluctuates about zero. A ball of initial conditions beginning near q l will be contracted into a line segment (with small thickness) under evolution of the dynamics (refer to Figure 3). A computer-generated trajectory beginning in the ball, with truncation error 6,
Fig. 3. A diagram showing how a fluctuating Lyapunov exponent can lead to unshadowability of pseudotrajectories.
Shadowability of chaotic dynamical systems
323
will be displaced a distance of 8 from the line segment. When the region around the numerical trajectory develops a second expanding direction by visiting a neighborhood of q2, the numerical trajectory will be pushed away exponentially fast from the line segment of true trajectories, resulting in an unshadowable pseudo-trajectory.
3. Brittleness 3.1. Homotopy continuation and brittleness If a pseudo-trajectory is continuously-shadowable, we can introduce a homotopic parameter c~ such that F(P(a)) = E(c~). We now define or0 and o/f such that E(o~0) = E0 and E (otf) : 0 , and if we vary ot continuously from or0 to otf, then P (or) transforms continuously from P(ot0) = P0 to P(olf) : X where P0 is the original pseudo-trajectory and X is the true trajectory (see Figure 4 for a schematic illustration). Homotopic deformation of P0 continuously to X, and hence moving E0 to 0, requires the straight line approach which decreases the error magnitude in the direction of the error. For homotopy continuation, F satisfies the following differential equation [14]
d F (ot) d~
-- - F ( a ) .
(1)
We note that Equation (1) can be written as
d F ( P ( u ) ) _. DpF(P(ot)) dP(ot) = - F ( P ( o t ) ) do~ du '
(2)
where DpF(P(~)) is the Jacobian matrix of F evaluated at P(c~). This equation is a continuous version of Newton's method. If we approximate d P(~)/d~ ~ (P(~ + Aot) P(u))/Aot and if [DnF(P(~))] -1 exists, then Equation (2) can be rearranged to the form
(3)
P(ot + A o t ) - P(ot) - [D/,F(P(ot))]-' F(P(ot))Aot. In fact, this reduces to standard Newton's method if we set Aot -- 1.
Eo
F1
Po ("
E
X Fig. 4. A schematic diagram illustrating the dependence of the error vector F on the homotopic parameter or.
C. Grebogi et al.
324
Using the homotopy continuation method to move the error vector E to 0 implies that the direction of E (or) stays constant while its magnitude decreases as we homotope from or0 to oef. Consequently, we can write the error vector as E(ot) - ]E(oe)ls162 where d is an NDdimensional vector of norm 1~1 - 1. If we define a new variable ~ such that ~(c~) -- [E(ot)[, then we can rewrite Equation (2) as
dP = [ D p F ( P ) ] _ l ~ .
(4)
d~
For P sufficiently close to the true trajectory vector X, we can make the following approximation: AP
A~
[DpF(P)]-'[l ~ [DpF(X)]-'d.
(5)
Roughly speaking, we see that there exists a constant of proportionality (l[ Dp F (X) ] - 1s162 between the the error magnitude (A~ = IE01) and the distance ( A P ) the pseudo-trajectory P must move in phase space to be deformed into a true trajectory X. We call this constant of proportionality brittleness. If the function F is smooth, then one has that [D F]-1 = D F -1 . Thus, the brittleness is essentially a property of the true trajectory, and it measures the stretching of F -1 near the origin of the error vector E. Alternatively, brittleness can be seen as an indicator of how far the true trajectory will be perturbed if we vary the noise level. For small one-step errors, we can see from Equation (5) that the brittleness should be independent of the error magnitude. However, it is also clear that brittleness as defined in Equation (5) would depend on the error directions s162Technically, if we want the brittleness to be a true constant independent of error directions, we would define it as II[DpF(X)] -1 II where II 9I[ denotes an operator norm. Since [ D F ] -1 is a linear operator defined on R No, that is, [DF] -l" ]t~ND ~ I~ ND, then II" II [30] is defined as the largest amplification of length that the operator [DF] -l is able to induce on a vector v in R N~ or
IIrDf]-' II----sup ~o
I[DF]-I(v)I
Ivl
However, applying the norm to [DF] -1 in Equation (5) involves taking the limit A~ --+ 0 and finding the maximum value of I[DpF(X)] -1 ill over all possible error directions s162so it is not really a workable definition. Instead, we start with a pseudo-trajectory, and when the pseudo-trajectory is continuously moved to a true trajectory by deforming its noise to zero, we call the maximum distance moved by any single trajectory point the shadowing distance. We then define brittleness 13 [14] of a pseudo-trajectory {pi }L0 as simply the ratio of shadowing distance over the magnitude of the one-step error or B =
shadowing distance one-step error
IPi
= max ~ i
-- Xi l
. t~
(6)
Shadowability of chaotic dynamical systems
325
A necessary condition for continuous shadowability is that the brittleness times the error magnitude (IE0l) of the pseudo-trajectory is smaller than the extent of the attractor in phase space. The brittleness of a pseudo-trajectory is thus a measure of its ability to be shadowed. If a pseudo-trajectory is created with noise level 10 -1~ for a chaotic attractor of unit size, and if the brittleness of the pseudo-trajectory is greater than 10 l~ then one cannot expect a true trajectory closely shadowing the pseudo-trajectory. For hyperbolic systems, pseudotrajectories of infinite length have finite (although possibly very large) brittleness [28]. For nonhyperbolic systems, one typically finds the brittleness to be an increasing function of the trajectory length. As the length of a trajectory of a nonhyperbolic chaotic process increases, the brittleness grows as the trajectory visits more nonhyperbolic regions of the dynamics. In regions near homoclinic tangencies, a small amount of noise may end up perturbing the trajectory points from the stable manifold onto the unstable manifold or vice versa. As a result, the perturbation (A P) of the true trajectory X as a response to the noise (A~) will be large. This, in turn, implies that that the magnitude of [DF] - l , and hence brittleness, will be large from Equation (5). The expected length between glitches is therefore related to the amount of hyperbolicity possessed by the system.
3.2. Test brittleness In practice, the true brittleness/3 cannot be computed precisely since it is a property of true trajectories, and our knowledge of the location of true trajectories is limited by numerical noise. However, we usually do not need a very precise value of brittleness since an order of magnitude estimate of brittleness will give us a very good indication of the shadowability of a system~ Thus, we can do a first order approximation of the brittleness, called test brittleness or/3, by performing one full Newton-step which converts the pseudo-trajectory {pi}N 0 into a less noisy trajectory {yi}N 0. The test brittleness is then defined [14] as /3 - max/[pi - Yi ]/6. Note that, unlike the true brittleness, test brittleness is a property of pseudo-trajectories, which is good since these are quantities generated in a computer simulation. The process of reducing the noise in a pseudo-trajectory using finite steps Aot in Equation (3), instead of reducing continuously, is called the refinement method [ 14,18,21 ]. In the refinement method, we use the Jacobians evaluated at pi to help us reduce the noise. Assuming the error at step i of the computation is 6i (that is, 6i = pi - f ( p i - l ) ) , N we need to perturb the pseudo-trajectory {pi}N 0 towards a less noisy trajectory {Yi }i=0 that satisfies the dynamics. If we called the perturbation (or correction) ci at each step i, t h e n Yi = Pi -+- ci. The requirement of a deterministic trajectory implies f (Yi ) = Yi+l or f (Pi + ci) = Pi+l + ci+l for i = 0 . . . . . N - 1. Using first order approximation, we have Pi+l + Ci+l = f (Pi -Jr-ci) ~-, f (Pi) -Jr-D f (pi)ci, a n d since f (Pi) = Pi+l -k- 6i+1, so
Ci+l ~ O f ( p i ) c i
+ 6i+1
for i = 0 . . . . . N - 1.
(7)
A straightforward iteration of the above equation is not feasible since any errors in ci will generally be amplified under iteration if f is chaotic. Instead, Equation (7) is split into two
326
C. Grebogi et al.
parts, one in the stable (contracting) subspace, and the other in the unstable (expanding) subspace. It will be a computationally stable iteration scheme if the stable component is iterated forwards and the unstable component is iterated backwards. In addition, we need to impose certain "boundary" conditions to guarantee uniqueness. In refinement, we are seeking an (N + 1)D-dimensional true trajectory X that satisfies a system of equations, F ( X ) -- 0, of N D dimension. In solving F ( X ) = 0, we arrived at Equation (7) which is N D-dimensional, but we do not have a unique solution until we specify D more conditions, which corresponds to an "initial" condition on the ci's. Since we split up the iteration scheme into two directions, we are imposing "initial" conditions on the ends of the finite-length trajectory or, more appropriately, "boundary" conditions. This can be done by choosing cu to be on the S-dimensional stable subspace and co to be on the U-dimensional unstable subspace where S + U -- D. Consequently, we are setting S components of co and U components of Cx to be zero, and since S + U = D, we have D more conditions on Equation (7). With this particular choice, we see that the true trajectory point x0, if it exists, would emanate from the unstable subspace of P0, and similarly, x u would emanate from the stable subspace of PN. This is a natural choice because, for uniqueness, we want the true trajectory and the pseudo-trajectory to agree outside the finite-length noisy trajectory. Thus, assuming noiseless dynamics before i - - 0 and after i = N , xi and pi would approach each other exponentially since the unstable (stable) subspace of po (PN) contracts for the inverse (forward) map. So if we write ci as the sum ci = si + ui of components in the stable and unstable directions, the above discussion implies we can set so = u U 0 and recursively solve -
-
-
Si +1 -- Sp ( O f (Pi)Si -k- Si)
(8a)
Ui -- l g p ( D f -1 (Pi+l)[Ui+l - 6i]),
(8b)
and
for Si and Ui, i = 0 . . . . . N - 1, where ,gp and lgp denote projections onto the stable and unstable subspaces, respectively. To project the vectors onto the stable and unstable subspaces, we need to determine the span of the stable and unstable subspaces. Specifically, we need to determine two sets of orthonormal vectors, {l)ij }j and {llOij }j, that span the stable and unstable subspaces at each step i, respectively. We begin by choosing an arbitrary set of U orthonormal vectors {wll . . . . . wlu} and an arbitrary set of S orthonormal vectors { v u l , . . . , VNS}. The basis for the stable and unstable subspaces at each step i can then be found by following the linearized map, that is, Df(pi-1)Wi-l,j Wij -- [ D f ( P i - l ) W i - l , j ]
for j -- 1 . . . . . U
(9a)
and Of-l(pi+l)Vi+l,j vij = ] O f _ l ( p i + l ) V i + l , j ]
for j = 1 . . . . . S.
(9b)
Shadowability of chaotic dynamical systems
327
To get an orthonormal basis, we perform G r a m - S c h m i d t orthogonalization procedure on the set {~il . . . . , ~iu} to get {//-)i 1 . . . . . //)IU} (it might be necessary to use a more stable form of orthogonalization procedure [ 17] rather than G r a m - S c h m i d t procedure). Keep in mind that Equation (9b) is iterated backwards to find the set of v e c t o r s { v i j }j spanning the stable subspace since the stable subspace is expanding when it is iterated backwards. It should be noted that since one arbitrary set of orthonormal vectors was chosen at i -- 1 to span the unstable subspace and another set was chosen at i ---- N to span the stable subspace, we expect minimal refinement near the ends of the trajectory. The refinement method does a very good job of reducing the noise in the middle portion of the trajectory. The reason is that the computed span of the stable subspace approaches the true span of the stable space after only a few iterates due to the expanding nature of the unstable subspace under the map. The same is true for the stable subspace when it is iterated backwards. In any event, the problem of minimal refinement near the ends of the trajectory is not a major concern if one works with a sufficiently long pseudo-trajectory. After completing one full set of iterations using Equation (8) (one Newton-step), we can now compute the test brittleness, which is the ratio of the maximum magnitude of correction c i to the magnitude of one-step e r r o r ~i or .~
Icil
/3 -- max - - . i I~il
(10)
If extra precision is available (beyond that which {pi } was calculated), we can compute f ( p i - l ) in extra precision, and thus find ~i in extra precision (since f ( p i _ l) = Pi + ~i) and solve for the corrections ci. If not, we estimate the size of max/ I~il and choose ~i to have randomly varying directions. As we saw in Section 3.1, brittleness is dependent on the error directions, thus we need to amend the definition of test brittleness so that it takes on the maximum value over all possible error directions if extra precision is not available. Since this is not feasible in practice, one only needs to repeat the computations for sufficiently many different sets of error directions to get a good estimate of the test brittleness of the pseudo-trajectory.
4. Numerical evaluations of brittleness 4.1. Brittleness of the forced damped pendulum The first system we performed numerical experiments on is the forced damped pendulum ~i + v~ + sin y - F cos t. We discretize the system by taking the time-T map, where T -- 27r/n and n is the number of steps per cycle of forcing. In the computer simulations, we used the parameters v = 0.2 and F -- 2.4. It is known that a forced damped pendulum satisfying the above equation is chaotic [20].
328
C. Grebogi et al.
To numerically estimate the value of brittleness, we created a pseudo-trajectory of the forced damped pendulum with a constant one-step error of magnitude 3. The direction of the error at each point of the trajectory was assigned randomly. Using the same error directions, a set of six different pseudo-trajectories were produced with 6 = 10 -10, 10 -9 . . . . . 10 -5. The ODE solver took 30 steps per 2zr-cycle of the forcing, and we integrated the trajectory for eight cycles for a total of 240 steps. We then used extra precision (machine precision ~ 10-14) to deform each pseudo-trajectory into a nearby true trajectory up to the extra precision. The distance between the original pseudo-trajectory and the true trajectory, as a function of the 240 trajectory points (eight cycles of forcing), is graphed in Figure 5. The lowest curve, for instance, corresponds to error magnitude 6 -- 10 - l ~ From the figure, we see that the ratio of the maximum of the curve (e.g., 8.5 • 10 - l ~ to the error magnitude ~ (e.g., 10 - l ~ is essentially a constant with a value of 85. This constant is the brittleness of the pseudo-trajectory. The proportionality holds over a large range of noise levels, as long as the pseudotrajectory itself is not significantly changed. To make Figure 5, a relatively short trajectory (0 < t < 167r, covered by 240 discrete time steps of the ODE solver) was used, and the
10 -a
'
''
"
i"
i
'
''
'
'
I
.
]
~
~
J
,
I
~
.
.
.
I
.
I,,
r
.
.
.
I
'"
"
'
~
1 0 -4
10 -s 0 0
0'J ,~..i
10 -6
.,...e 0
10 -7
10 -a
10 -9
~0
-10
,
0
i
~
J
50
~
_,l
t
1O0 150 Trajectory point
i.
,
i
I
t
200
Fig. 5. The vertical axis measures the total distance moved by each point of the pseudo-trajectory as it was continuously deformedinto a true trajectory.
Shadowability of chaotic dynamical systems
329
added noise was small. Larger amounts of noise would change the pseudo-trajectory (because of the exponential divergence of chaotic trajectories), so that the comparison across noise levels would no longer be valid. This effect can be seen to a small degree in Figure 5 for large error values, beginning around step 200. From the discussion in Section 3.1, it was conjectured that for small one-step errors, the brittleness should be independent of the error magnitude. This independence is nicely demonstrated in Figure 5 where each curve has the same general shape, and one curve is essentially a scaled version of another. It was also found that the brittleness should depend on the error directions. To test this dependence, twenty different trials were performed with varying randomly-chosen one-step error directions. This resulted in brittleness estimates of between 15 and 135. Therefore, as discussed in Section 3.2, the brittleness should be defined to be the maximum of this magnification factor found over all possible error directions. In practice, we do not need a very accurate value of brittleness since an order of magnitude estimate of brittleness will give us a very good indication of the shadowability of a system. Along this line, we need to check that the test brittleness algorithm gives a reasonable estimate of the brittleness of a pseudo-trajectory. To do this, we generated a pseudo-trajectory in single precision and deformed it into a nearby true trajectory using double precision. The brittleness generated using this method is then compared to the value of test brittleness created using one full Newton step. We found that the numerical values of the brittleness and test brittleness are close to each other, differing typically by 10% when the trajectory is shadowable.
4.2. Test brittleness of the double rotor system We now examine a dynamical system for which even short pseudo-trajectories have extremely high test brittleness, and hence high brittleness. We believe that most nonlinear high-dimensional systems will be susceptible to this obstruction to the existence of nearby long true trajectories. The double rotor map [ 19] is a four-dimensional map which describes the time evolution of a mechanical system consisting of two connected massless rods lying on a horizontal plane (there is no gravity) as shown in Figure 6. The first rod, of length l l, rotates around a fixed pivot P1; the second rod, of length 212, pivots around P2, the opposite end of the first rod. The angles 01 (t), 02(t) specify the position at time t of the first and second rod, respectively. There is a point mass m l at the free end of the first rod (P2), and two equal point masses m2/2 at the ends of the second rod. Friction at the pivots is accounted for by vl, v2 which are the coefficients of friction at P1 and P2, respectively. A delta-function vertical impulse f (t), of magnitude p and always from the same direction, is applied to one end of the second rod (P3 in Figure 6) at times t -- T, 2T . . . . . The map describing the evolution of the system's four phase variables (the two angular positions and momenta) is given by: 0(,;+l) _ 01,,) + Mll 0 0 for a range of speeds 13, then the synchronized state is convectively unstable. For unidirectionally coupled arrays (Y2 = 0) the comoving Lyapunov exponent is given explicitly as (see Ref. [23]) lmv
A (v) = log I&l - (1 - v) log ~
1 -
13
?'l
- v log - - . ?'J
(25)
It turns out that for v -- ~'1, the comoving Lyapunov exponent is exactly the Lyapunov exponent of the uncoupled single element dynamics. In fact, there is a range of speeds around Fl for which A (v) > 0. We conclude that a unidirectional array of synchronized chaotic elements is convectively unstable yet linearly stable provided condition (23) holds. In general, even if 72 > 0, the spatially uniform state exhibits a convective instability [3,4] provided that condition (23) holds. Weak noise in the dynamics can destroy the coherent state in a convectively unstable array. Disturbances at the boundary will grow to have significant amplitude for a convectively unstable array of sufficient size. In the presence of noise, only the elements near the "upstream" edge will be essentially synchronized, evolving chaotically, while the remaining elements will display complex incoherent time evolutions. In Figure 13, 16 consecutive time steps of the eventual dynamics of an array of 100 sites are overlayed, starting from random initial conditions. A random variable, uniformly distributed on the interval [ - 1 0 -l~ 10 -1~ was added at each time step and at each site to the true dynamics of Equation (15). The coherence length, or the number of elements that are essentially synchronized near the upstream edge can be seen from Equation (24) to grow with reduced noise as log a, where a is the maximum magnitude of the added noise. Therefore, in order to e-shadow a numerical trajectory of an N element array, the noise level cr decreases exponentially with the array size. In other words, for a given noise level the presence of spatial instabilities drastically limits the size of systems whose numerical trajectories have anything to do with the true ones. In other words, a numerical trajectory of an array at the parameters of Figure 13 can be shadowed for a long time to within 10 -7, only if we limit the size of the system to consist of at most 30 elements (assuming that the only noise present is that due to roundoff of O(10-15). Computationally, one way of obtaining more realistic trajectories for large arrays is through applying a sparse array of local feedback controllers, separated by distances that are smaller than the coherence length [4].
C. Grebogi et al.
342
1.0
0.5
"~
0~
-0.5
m
.0
0
I
I
I
I
20
40
60
80
100
Fig. 13. 16 consecutive time steps in the eventual d y n a m i c s of an array with Yl = 0.75, T2 = 0.05, a* -- 1.6, at noise level cr -- 1 0 - 1 0 , are overlayed.
7. Implications for modeling Thus far, we have concentrated on the link between the model and its numerical solutions, but how do these shadowing results impact on the link between the model and nature? In this section, we argue that obstructions to shadowing due to fluctuating Lyapunov exponents impose a severe limitation on modeling. In particular, this means that such a system cannot be modeled faithfully even if one is able to observe and record all data generated from the system, and solutions to any model of the system, even when an exact solution is obtainable, will not reflect the solutions of nature. We begin by examining what one considers a good deterministic model of nature. A necessary requirement for such a model is robustness under small perturbations. Any model has parameter values that are not known with exact precision. One can easily generate two different versions of the model using slightly different parameter values. For chaotic systems, it is well known that the outcome of the system is sensitively dependent on the initial conditions, that is, a slight difference in the initial conditions can result in vastly different outcomes. In view of this, we consider a model robust if the set of all possible outcomes of the two versions of the model are very similar. To illustrate what we mean, consider the simple case where two very closely related models are used to emulate a physical system in nature. Denote these models as model A and model B, and if the differences between the two are small, we can regard one as a slightly different version of the other. Some possible differences between models A and B could be: (1) a small change in one of the parameter values, (2) a slightly different external influence on each, or (3) a different noise level in the models.
Shadowability of chaotic dynamical systems
343
For "well-behaved" physical systems, we expect the set of all possible outcomes from model A to agree closely with the set of all possible outcomes from model B. Specifically, we are interested in outcomes that evolve in time or trajectories. Then, robustness implies that for every trajectory of A, there exists at least one trajectory of B that stays uniformly close to, or shadows, the particular trajectory of A and vice versa. Difficulties appear when trajectories from one model fail to be shadowable by trajectories from the other. The problem becomes critical when no trajectory of A follows closely any trajectory of B (or vice versa) for all but short periods of time. Since trajectories from closely related models do not agree, then either model is useless in representing the physical system. If this problem persists for various configurations of A and B (that is, for a wide parameter range of both A and B), then this poses a major obstacle to modeling the particular physical system. In our study of the double rotor map, we have exactly this problem of the model not being robust in a certain parameter range, namely around p = 8. It was found that the shadowing time for trajectories from slightly different models is very short. Thus, this kind of behavior makes it difficult to rely on any model trajectories for acceptable periods of time, and deterministic modeling has encountered a major stumbling block. The specific cause of this particular problem stems from the fluctuating Lyapunov exponent. Since the double rotor map is a four-dimensional dissipative map and for the parameter ranges in which the system is chaotic, the window in which there is a fluctuating Lyapunov exponent is thus not large, and we only see the modeling problem around p = 8. However, we believe there is no such constraints in much higher-dimensional systems, and thus we conjecture that this modeling difficulty is more common in higher dimensional chaotic systems [25,26].
8. Conclusions
We have examined the various levels of difficulties that can obstruct the shadowability of model trajectories. Along the way, we have defined certain quantities like brittleness and shadowing time that should be of use in diagnosing whether certain dynamical systems are shadowable. These ideas and concepts were applied to the double rotor map which leads to the recent discovery that fluctuating Lyapunov exponent poses a major obstacle to deterministic modeling. Furthermore, we believe this difficulty to be more common in higher dimensional chaotic systems as the possibility of having one or more finite-time Lyapunov exponents fluctuate about zero increases with the dimensions of the system. This raises the interesting question: How common is this problem? It is unclear at this point how many physical systems suffer from this problem, but we believe one should at least check whether any of the Lyapunov exponents fluctuate about zero when modeling is undertaken for any chaotic system. Given the vast array of models ranging from climate modeling to turbulent fluid flow which are both high-dimensional and chaotic, it is imperative that the limits to deterministic modeling be examined carefully if scientists are to obtain faithful portrayals of nature. We should mention that, in addition to the work in Ref. [9], Chow and collaborators also published in [7,8,10-13].
344
C. Grebogi et al.
Acknowledgements This research was supported by grants from FAPESP and CNPq, both Brazilian agencies, and from ONR and NSE References [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [ 16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36]
R. Abraham and S. Smale, Proc. Sympos. Pure Math., Vol. 14, Amer. Math. Soc., Providence, RI (1970), 5. D.V. Anosov, Proc. Steklov Inst. Math. 90 (1967), 1. I. Aranson, D. Golomb and H. Sompolinsky, Phys. Rev. Lett. 68 (1992), 3495. D. Auerbach, Phys. Rev. Lett. 72 (1994), 1184. K.L. Babcock, G. Ahlers and D.S. Cannell, Phys. Rev. Lett. 67 (1991), 3388; A. Tsameret and V. Steinberg, Phys. Rev. Lett. 67 (1991), 3392. R. Bowen, J. Differential Equations 18 (1975), 333. S.N. Chow, X.B. Lin and K.J. Palmer, Differential Equations: Proc. EQUADIFF Conference, C.M. Daftermos, G. Ladas and G. Papanicolaou, eds, Marcel Dekker, New York (1989), p. 127. S.N. Chow and K.J. Palmer, Dynamics Differential Equations 3 (1991), 361. S.N. Chow and K. Palmer, J. Dynamics Differential Equations 3 (1991), 361; J. Complexity 8 (1992), 398. S.N. Chow and K.J. Palmer, J. Complexity 8 (1992), 398. S.N. Chow and E.S. Van Vleck, Random Comput. Dynamics 1 (1992), 197. S.N. Chow and E.S. Van Vleck, SIAM J. Sci. Comput. 15 (1994), 959. S.N. Chow and E.S. Van Vleck, Contemp. Math. 172 (1994), 97. S. Dawson, C. Grebogi, T. Sauer and J. Yorke, Phys. Rev. Lett., 73 (1994), 1927. R.J. Deissler, J. Statist. Phys. 40 (1985), 371; R.J. Deissler, Phys. D 25 (1987), 233. W. Feller, An Introduction to Probability Theory and its Applications, Wiley, New York (1957). G. Golub and C. Van Loan, Matrix Computations, Johns Hopkins Univ. Press, Baltimore (1989); Y.C. Lai, C. Grebogi and J.A. Yorke, Nonlinearity 6 (1993), 779. C. Grebogi, S. Hammel, J. Yorke and T. Sauer, Phys. Rev. Lett. 65 (1990), 1527. C. Grebogi, E. Kostelich, E. Ott and J.A. Yorke, Phys. D 25 (1987), 347; R. Romeiras, C. Grebogi, E. Ott and W.P. Dayawansa, Phys. D 58 (1992), 165. E.G. Gwinn and R.M. Westervelt, Phys. Rev. Lett. 54 (1985), 1613; K. Hockett and P.J. Holmes, Ergodic Theory Dynamical Systems 6 (1986), 205. S. Hammel, J.A. Yorke and C. Grebogi, J. Complexity 3 (1987), 136; Bull. Amer. Math. Soc. 19 (1988), 465. P. Hartman, Ordinary Differential Equations, Wiley, New York (1964). K. Kaneko, Phys. D 23 (1986), 437; R.J. Deissler and K. Kaneko, Phys. Lett. A 119 (1987), 397; K. Kaneko, Phys. Lett. 111 (1985), 321. Y. Kuramoto, Chemical Oscillations, Waves and Turbulence, Springer, Berlin (1984). Y.C. Lai and C. Grebogi, Phys. Rev. Lett. (1999). Y.C. Lai, C. Grebogi and J. Kurths, Phys. Rev. E (April 1) (1999). J. Liu and J.P. Gollub, Phys. Rev. Lett. 70 (1993), 2289. K. Meyer and G.R. Hall, Introduction to Hamiltonian Dynamical Systems and the N-body Problem, Springer, New York (1992). J.I. Palmore and J.L. McCauley, Phys. Lett. A 122 (1987), 399; J.L. McCauley and J.I. Palmore, Phys. Lett. A. 115 (1986), 433. L. Perko, Differential Equations and Dynamical Systems, Springer, New York (1991). O. Reynolds, Philos. Trans. Roy. Soc. 44 (1883), 51. J.M. Sanz-Serna and S. Larsson, Appl. Num. Math. 13 (1993), 181. T. Sauer, C. Grebogi and J.A. Yorke, Phys. Rev. Lett. 79 (1997), 59. T. Sauer and J. Yorke, Nonlinearity 4 (1991), 961. M.E Schatz, R.P. Tagg, H.L. Swinney, P.E Fischer and A.T. Patera, Phys. Rev. Lett. 66 (1991), 1579. I. Waller and R. Kapral, Phys. Rev. A 30 (1984), 2047; K. Kaneko, Prog. Theor. Phys. 72 (1984), 480.
CHAPTER
8
Numerical Analysis of Dynamical Systems* John Guckenheimer Mathematics Department, Malott Hall, Cornell Universi~, Ithaca, NY 14853, USA
Contents 1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2. Numerical integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1. Classical theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2. Limit sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
347 348 348 352
2.3. Error estimation and verified computation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3. Computation of invariant sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
355 358
3.1. Periodic orbits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2. Invariant toil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3. Stable and unstable manifolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4. Chaotic invariant sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.5. Statistical analysis of time series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4. Bifurcations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1. Bifurcation theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2. Continuation methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3. Numerical methods for computing bifurcations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
358 365 366 369 372 374 374 379 381 385
*This work was partially supported by grants from the Department of Energy, Air Force Office of Scientific Research and the National Science Foundation. H A N D B O O K OF D Y N A M I C A L S Y S T E M S , VOL. 2 Edited by B. Fiedler 9 2002 Elsevier Science B.V. All rights reserved 345
This Page Intentionally Left Blank
Numerical analysis of dynamical systems
347
1. Introduction
This paper presents a brief overview of algorithms that aid in the analysis of dynamical systems and their bifurcations. The viewpoint is geometric and the goal is to describe algorithms that reliably compute objects of dynamical significance. Reliability has three facets: (1) the probability that the algorithm returns an answer for different choices of starting data, (2) whether the computed object is qualitatively correct, and (3) the accuracy with which the objects are computed. Numerical analysis has traditionally concentrated on the third of these topics, but the first two are perhaps more important in numerical studies that seek to delineate the structure of dynamical systems. This survey concentrates on exposition of fundamental mathematical principles and their application to the numerical analysis of examples. There is a strong interplay between dynamical systems theory and computational analysis of dynamical systems. The theory provides a framework for interpreting numerical observations and foundations for algorithms. Apparent discrepancies between computational output and theoretical expectations point to areas where phenomena have been overlooked in the theory, areas where algorithms produce misleading results, and areas where the relationship between theory and computation is more subtle than anticipated. Several examples of simple systems are used in this article to illustrate seeming differences between computation and theory. Geometric perspectives have been introduced relatively recently to the numerical analysis of ordinary differential equations. The tension between geometric and more traditional analysis of numerical integration algorithms can be caricatured as the interchange between two limits. The object of study are systems of ordinary differential equations and their flows. Numerical solution of initial value problems for system of ordinary differential equations discretize the equations in time and produce sequences of points that approximate solutions over time intervals. Dynamical systems theory concentrates on questions about long time behavior of the solution trajectories, often investigating intricate geometry in structures formed by the trajectories. The two limits of (1) discretizing the equations with finer and finer resolution in time and (2) letting time tend to infinity do not commute. Classical theories of numerical analysis give little information about the limit behavior of numerical trajectories with increasing time. Extending these theories to do so is feasible only by making the analysis specific to classes of systems with restricted geometric properties. The blend of geometry and numerical analysis that is taking place in current research has begun to produce a subject with lots of detail and richness. Interesting examples from diverse applications infuse the subject and establish mathematical connections between other disciplines. Thus, the development of better algorithms and software can have far reaching consequences. This paper takes a pragmatic view of this research. The focus here is on understanding the mathematical properties observed in numerical computation and on assessing the capability of theory, algorithms and software to elucidate the structure of dynamical models in mathematics, science and engineering. Issues that have been investigated from this perspective are presented and a few pointers are provided to the rapidly growing literature.
348
J. Guckenheimer
2. Numerical integration 2.1. Classical theory Systems of ordinary differential equations Jc -- f (x),
(1)
f : IRn --+ R n,
define vector fields. Vector fields on manifolds are also defined by systems of the form (1) in local coordinates [148]. The existence and uniqueness theorem for ODEs [86] states that a Lipschitz continuous vector field (1) has a unique flow q0 : IRn x IR --+ I[~n defined in a neighborhood of ]Rn x 0 with the properties that r 0) - x and 4~(x, t) = f ( ~ ( x , t)). The time t m a p ~t :IR n ~ IR'z is defined by ~bt(x) -- cI)(x,t). The curves cI)(x,t) defined by fixing x and letting t vary are trajectories, denoted by xt. There are seldom explicit formulas for 4} in terms of f . Iterative n u m e r i c a l integration algorithms are used to compute trajectories with discrete time approximations that march along the trajectories. Numerical integration is a mature subject, but still very active - especially with regard to algorithms designed for special classes of equations. The subject is supported by extensive theory and abundant software. Several excellent texts and references are Henrici [91 ], Gear [66], Hairer et al. [86], Hairer and Wanner [87], and Ascher and Petzold [ 10]. Part of the intricacy of the subject lies in the fact that no single integration algorithm is suitable for all problems. Different algorithms reflect trade-offs in ease of use, accuracy and complexity. The basic concepts of numerical integration are explained here only briefly. Explicit Runge-Kutta algorithms are described, followed by a short survey of refinements, alternate approaches and terminology for numerical integration of ODEs. Explicit Runge Kutta methods construct mappings ~Ph from the vector field (1) that depend upon a parameter h, called the time step of the method. Several partial steps are taken from an initial point, and the values are combined to produce the map gth. The primary goal is to produce a family of mappings 7th depending on h, whose Taylor series expansion in the time step h agrees with that of the flow map q~h to a specified degree. Each function evaluation is called a stage of the method. The method is said to have order d if the Taylor series agree to degree d 4- 1. Each stage is performed at a point that depends upon the preceding stage. The scheme for an s-stage method has the following form: kl -
f (x),
k2 = f (x + haz l k l ) ,
ks -- f (x 4- h(aslkl 4- as2k2 4-...-Jr- as,s-lks-l)), r
-- x + h ( b l k i + b2k2 + . . .
+ bsks).
(2)
Formulation of higher order Runge-Kutta methods for system (1) is based upon repeated differentiation of this equation. With each differentiation, substitution of f (x) for ,f on the right hand side yields expressions for the derivatives of trajectories in terms of derivatives
Numerical analysis of dynamical systems
349
of f . For example, the second and third derivatives of x ( t ) are given by Y- Dvf/c- Dxff, X (iii) ~- Dxx f f 2 + (Dx f ) 2 f .
Taylor expansion of ~h in the system of equations (2) gives expressions in the derivatives of f and the coefficients aij and b j of the method. Equating the degree d -+- 1 expansions of ~Ph and x ( h ) obtained from repeated differentiation of system (1) produces a system of polynomial equations for aij and b j . The number of equations obtained in this manner grows faster than d. For d ~< 4, there are order d methods with d stages [86]. Order d methods with d > 4 require more than d stages. As d increases, the complexity of solving the equations for order d methods grows rapidly. The fourth order method k l = h f (xo), k2 = h f (xo + kt /2), k3 = h f (xo + k2/2), k4 = h f (xo + k3 ), 1 xl - x0 + -7(kl -+- 2k2 + 2k3 -+- k4) b
is a "standard" choice [86]. The simplest Runge-Kutta method is the forward Euler method defined by Eh (x) = x + h f (x). This is a single stage explicit Runge-Kutta method, but it receives limited use for two reasons. First, it only has order one. For example, if f (x) = x, then Eh (x) = (1 -+- h)x and ~Ph(x) = exp(h)x = (1 + h + h 2 / 2 ) x + O(h3). If I --+ oo and h --+ 0 so that lh = t, then the iterates E~ (x) converge to ~Pt(x). This expresses the convergence of the method. In the example f ( x ) -- x with x(0) - 1 and t - 1, Eti/l(1) -- (1 + 1/l) l while ~Pl (1) -- e. Taking logarithms, we estimate the difference log(e) - log(Etl /t(1)) -- 1 -- I log( 1 + 1/ l) -- l / 2 + o(l). The order gives the degree of the lowest order term in the difference between the Taylor series expansion of ~Pt(x) and its computed value from 1 steps of steplength h with lh = t. Computing the value of the vector field to single precision (seven decimal digits) of accuracy for moderate times with a first order method can be expected to take millions of time steps. This can be reduced to a few tens of time steps with a fourth order method. Even with fast computers, the performance of the Euler method is awful. The second limitation of the Euler method is its instability for stiff systems. This is exemplified by the example ~ = -)~x with Eh(x) = x - h)~x and ~ t ( x ) = exp(-)~t). All of the solution trajectories tend to zero as t ~ cx~. However, if h)~ > 2, then the trajectories of the numerical method are unbounded, with oscillating signs. This phenomenon persists in multidimensional linear systems with negative eigenvalues of large magnitude. Many examples, in particular those obtained by discretization of partial differential equations, have rapidly decaying modes whose eigenvalues place stringent limits on the time steps with which the Euler method gives trajectories that even qualitatively resemble the trajectories of a vector field.
350
J. Guckenheimer
Explicit, fixed time-step Runge-Kutta methods are only one group of widely used methods. We give here a list of criteria that are used to distinguish and classify numerical integration algorithms. Explicit vs. implicit. In explicit methods, the next time step is computed by direct evaluation of function(s) of previously computed data. In implicit methods, the next step is computed by solving a system of equations, often using Newton's method. The use of implicit methods is motivated by the difficulties of solving stiff systems. Compare the explicit Euler method with the implicit Euler method, defined by x,7+l = x,, + h f (Xn+l). This differs from the explicit Euler method in that the function evaluation takes place at the still unknown next point along the approximate trajectory. The equation for x,,+l is implicit since x,,+l appears on the right hand side of the equation. For the linear example ,f - -)~x with large )~ > 0, the equation is readily solved, giving the formula x,,+l = x,,/(1 § h)~). When )~ > 0, ]xnl ~ 0 monotonically for any initial condition and any positive step size h. The limitations on step length that were necessary to achieve stability for the explicit Euler method have disappeared, at least for this system. All explicit Runge-Kutta methods applied to a linear equation yield polynomials that are unbounded as the step length increases. Therefore, they all become unstable when applied to the equation ,f = -)~x with large enough )~ > 0. When the desired time span for an integration is long enough compared to the step length required for stability by explicit integrators, the differential equation is called stiff. Development of stiff integrators was a particularly active research area in the 1970s. The guiding criterion that was applied to this work was Dahlquist's concept of Astability [35], namely that the integrator should remain stable for all positive step sizes when applied to a linear system with negative eigenvalues. Explicit Runge-Kutta methods are not A-stable, a fact that provided strong motivation for improvement of implicit methods. One-step vs multi-step. One-step methods only use information from the last computed step while multi-step methods use information from several previously computed steps in determining the next step of the integrator. Multi-step methods have the advantage over one-step methods that higher order accuracy can be achieved with a single function evaluation at each time step. On the other hand, theoretical interpretation of one step methods is easier since they can be regarded as giving approximations to the flow map 4~. A kstep multi-step method can be viewed as a discrete mapping on a product of the phase space with itself k times, but it is difficult to single out the class of mappings on this larger space than correspond to multi-step methods. A k-step method also needs a way to compute the first k steps, for example by using a Runge-Kutta algorithm. Implicit multi-step methods called backwards differentiation formulae are used widely as integrators for stiff systems [ 10,87]. Fixed step vs. variable step. The most common type of adaptation in numerical integrators is the use of prediction-correction to adjust step size. Variable time step algorithms incorporate criteria for assessing the accuracy of each computed time step. With RungeKutta methods, accuracy is commonly assessed by formulating methods of different orders that share intermediate time steps. By comparing the solutions with the principal terms in the asymptotic expansions of the truncation error for each method, an estimate of the error
Numerical analysis of dynamical systems
351
for the time step can be made. If the estimate is larger than a predetermined error criterion, the time step is reduced and the step is repeated. Typically, there are also criteria used to determine when time steps can be increased while maintaining the desired error criteria. For the most part, heuristic arguments and tests with sample problems form the basis of adaptive strategies that are used to vary time steps. As with multi-step methods, variable step methods are hard to interpret as discrete approximations to a flow. The use of variable time step methods is an area in which practice is far ahead of theory. There are few theorems describing the qualitative properties of adaptive time step algorithms viewed as dynamical systems. Extrapolation is a technique that can be used to improve the order of accuracy of either explicit or implicit integrators. Many integrators have asymptotic expansions in step size h for the errors made in computing 4~t as h tends to zero. When numerical computations of qSr are performed with different step sizes, the sequence of computed values can be fit to the beginning of the asymptotic expansion for the errors. These can then be extrapolated to the limit h = 0, giving a higher order estimate for 4~t. The extrapolation process is independent of the integrator that is used, so that high orders are achievable using simple low-order integrators. Most implementations of extrapolation methods are based upon integrators for which only even terms appear in the asymptotic expansion of the error. The methods can readily vary their order adaptively by selecting the number of intermediate time-steps and the segment of the asymptotic expansion that is fit. These properties give these methods more flexibility in automatically adapting to ongoing computations than high order RungeKutta methods. There is renewed interest in Taylor series methods for numerical integration at this time, some of it motivated by work on verification discussed below in Section 2.3. Series solutions of trajectories are easy to construct theoretically: substitution of a power series expansion x(t) = ~ ai ti into the system (1) yields a recursive system of equations for ai. Implementation requires that the series expansion of f ( x ( t ) ) is computed, and this is not straightforward. On the one hand, finite difference approximations of the derivatives of f are no more accurate than the Runge-Kutta methods. On the other hand, symbolic differentiation of f produces long complicated formulas that are expensive to evaluate. But there is a third way. Automatic differentiation [73] is a technique for computing derivatives with only round-off errors that makes the computation of highly accurate Taylor series approximations to solutions practical. The series can be computed readily to sufficiently high order that the radius of convergence and truncation errors of the Taylor polynomials can be estimated, enabling choice of time steps based entirely upon information at the initial point of the step. Moreover, the methods produce dense output in that the Taylor polynomials give the value of the trajectory at all intermediate times to uniform order. In Runge Kutta methods, there is no procedure to directly evaluate the trajectory at fractional time steps while maintaining the order of accuracy of the methods. A posteriori tests of the Taylor polynomials can form the basis for adaptive reduction of step size. For example, error criteria can be formulated in terms of the difference between the vector field evaluated along the Taylor polynomial approximation to a trajectory and the tangent vectors to these approximate solutions [32]. While Taylor series methods long ago were demonstrated to work extremely well on a broad range of examples [32], they have not yet been widely adopted. The advent of improved programming languages and environments may change this situation.
352
J.
Guckenheimer
Complementary to the classification of numerical integrators as explicit/implicit, onestep/multi-step and adaptive/fixed-step are questions about whether numerical integrators preserve mathematical structure found in special classes of problems. The most intense effort has been devoted to the development of symplectic integrators [ 134]. A Hamiltonian vector field is one that has the form of Hamiltonian's equations in classical mechanics: D - O H / O q and ~) - - O H / O p with Hamiltonian function H" IR" x R 'Z --+ R. The flow of a Hamiltonian vector field is symplectic, meaning that it preserves the two form ~ d p i / x dqi and energy preserving, meaning that H is a constant of the motion. A symplectic integrator is one for which each time step is given by a symplectic map. The differences between symplectic integrators and other methods become most evident when performing very long time integrations. A common feature of non-symplectic integrators is that the value of H changes slowly along trajectories, but eventually drifts far from its original value [151]. Symplectic integrators do not usually preserve energy either, but the fluctuations in H from its original value remain small. On a deeper level, KAM theory implies that quasiperiodic motions are frequently observed in symplectic flows [ 134]. Symplectic integrators define maps that satisfy assumptions of the KAM theory while nonsymplectic integrators generally do not. The construction of symplectic integrators is still sufficiently new that it is early to tell how prevalent they will become as the methods of choice for investigation of conservative systems.
2.2. Limit sets Classical theories of numerical integration give information about how well different methods approximate trajectories for fixed times as step sizes tend to zero. Dynamical systems theory asks questions about asymptotic, i.e. infinite time, behavior. Only recently has there been emphasis upon understanding whether numerical methods produce good approximations to trajectories over arbitrarily long periods of time [ 143]. We investigate the question as to when the limits of step size tending to zero and time tending to infinity can be interchanged in numerical computations, but there are additional questions that give a different perspective on long time integration. Two phenomena shape our discussion on the limitations of long time integration. The first phenomenon is based upon a slow drift of numerically computed trajectories from those of the underlying vector field. Consider the explicit Euler method applied to the harmonic oscillator k
~
~y~
m
X.
The flow trajectories are circles, but the non-zero trajectories of the numerical method 2 .2 satisfy x,,+l + Yn+l - (1 + hZ)(xn2 nt- y2) n and are all unbounded. The second phenomenon is closely related to structural stability of hyperbolic invariant sets. Hyperbolic invariant sets have the property that trajectories do not remain close. There is a bound 6 > 0 so that no two distinct trajectories in the invariant set remain within distance 6 of each other. Given this fact, it is unreasonable to expect that a numerical computation will remain close to the trajectory of its initial condition for all time. Nonetheless, there is a sense in which
Numerical analysis of dynamical systems
353
numerical trajectories can give excellent approximations to trajectories within the invariant set. The concepts of pseudoorbits and shadowing described in this section help explain this apparent paradox. Further discussion of infinite time behavior of flows and approximating numerical methods will be facilitated by the following definitions and concepts from dynamical systems theory: 9 I n v a r i a n t set.
A is an invariant set if 4~t(A) = A for all t. A is forward invariant if 4~t(A) C A for all t > 0. A is backward invariant if ~bt(A) C A for all t < 0. 9 co-limit set o f a trajectory.
y is in the co-limit set of the trajectory x ( t ) if there is a sequence ti -+ e~ so that x ( t i ) y. 9 u - l i m i t set o f a trajectory.
y is in the or-limit set of the trajectory x ( t ) if there is a sequence ti --+ -cx3 so that x ( t i ) --+ y. 9 W a n d e r i n g point.
x is a wandering point if there is a neighborhood U of x and a T > 0 so that t > T implies x (t) r U. 9 N o n - w a n d e r i n g set.
The non-wandering set is the complement of the set of wandering points. 9 (Uniformly) hyperbolicstructure.
A hyperbolic structure of a compact invariant set A is an invariant splitting of tangent spaces T A R " - - E s G E u | E c so that E c is the one dimensional space tangent to the vector field and for t large Ddct expands vectors in E u at an exponential rate while contracting vectors in E s at an exponential rate. The wandering set of a flow is open and the nonwandering set is closed. One of the goals of dynamical systems theory is to decompose the nonwandering set into disjoint closed subsets, called basic sets, which have dense orbits. When this can be done, the entire phase space can be partitioned into the stable sets of the basic sets. The stable set of a basic set is the set of points whose co-limit is in the basic set. Similarly, the unstable set of a basic set is the set of points with or-limit set in the basic set. The geometric characterization of structural stable dynamical systems advanced by the seminal work of Smale [ 140] gives a large class of systems for which these decompositions have a particularly nice form. On a compact manifold M, structurally stable systems have a finite number of basic sets A i , each of which possess a uniformly hyperbolic structure. Chaotic dynamical systems display sensitive dependence to initial conditions: nearby trajectories diverge from one another, typically at exponential rates. In the presence of sensitive dependence to initial conditions, it is hardly reasonable to expect that a numerical method will accurately track the trajectory of its initial condition for long times, since trajectories of nearby initial conditions do not remain close to the chosen one. Any error made in a single step of a numerical integration will be amplified by the inherent divergence of trajectories. This fact underlies fundamental limitations in the accuracy of numerical integration over long times. In hyperbolic invariant sets, it is inevitable that errors in the numerical solution of the initial value problem grow exponentially. This is even true for
354
J. Guckenheimer
iteration of diffeomorphisms where there is no truncation error of numerical integration, only round-off error in the evaluation of the diffeomorphism. The effects of sensitivity to initial conditions prompt new perspectives on the initial value problem. Over short times, we expect numerical integration to be accurate. What positive results can be established about long time integration? In the case of hyperbolic invariant sets, there is a satisfying theory whose ultimate conclusion is that numerical trajectories approximate actual trajectories of a different initial condition. The concepts of shadowing and pseudoorbit [20] have been used to explore these issues. For a discrete dynamical system defined by the mapping F : ~ n ~ ]Kn, a 6-pseudoorbit is a sequence of points xi with the property that Ixi+l - F(xi)l < 3. On each iterate, there is an error of at most 6 in the location of the next point relative to the location of the mapping applied to the current point of the pseudoorbit. If there is a point y whose trajectory has the property that IFi (y) - x i l < e, then we say that the trajectory of y e-shadows the pseudoorbit. The extension of the shadowing concept and this theorem to a flow q~ requires allowance for time "drift" along trajectories. If (xk, hk) 6 ~n x R is a sequence of points and time increments, it is a 3-pseudoorbit if q~(xk, tk) - xk+l < 3 for each k. The pseudoorbit eshadows the orbit of y if there are times tk with [xk - q~(y, tk)l < e and Ihk - (tk+l -- tk)] < e [30]. For a numerical iteration or integration, we can view the algorithm as producing a pseudoorbit. The one step accuracy of the method determines a ~ for which the numerical trajectory is a pseudoorbit. We can ask for which systems, which one step methods grh, which initial conditions x and which e there is a point y so that 9 (y, nh) e-shadows the numerical trajectory ~p~'(x). The qualitative characteristics of the invariant sets of a flow 9 are a big factor in determining whether they satisfy shadowing properties. Hyperbolic basic sets do. Here is the statement of a result for discrete time systems. THEOREM 1 [20]. Let A be a hyperbolic invariant set o f a C 1 diffeomorphism F. If e > O, there is a ~ > 0 such that every 3-pseudoorbit f o r a trajectory in A e-shadows a trajectory of FinA. Numerical trajectories that start near a hyperbolic attractor A will stay near A and they will be shadowed by trajectories within the attractor. Thus, the shadowing property of hyperbolic sets enables us to recover long time approximation properties of numerical trajectories when they are computed with sufficient accuracy for fixed, moderate times. This theorem is very satisfying mathematically, but we note with caution that there are few examples of hyperbolic attractors that arise from physical examples. The chaotic attractors that have been observed in applications seem not to be hyperbolic and structurally stable. The discrete Henon mapping is the example that has been studied most intensively [89]. The details of its dynamical properties are much more subtle and complex than those of hyperbolic attractors [20], but they appear to be typical of chaotic attractors with a single unstable direction. Additional complexity is present in partially hyperbolic attractors in which the dimension of the unstable manifolds of points vary within attractors [2,127]. Hammel et al. [88] have investigated the shadowing properties of one dimensional mappings and the Henon mapping. They demonstrate that very long sections of trajectories have the shadowing property, but that one cannot expect it to hold for infinite time.
Numerical analysis of dynamical systems
355
Coombes et al. [30] implemented methods for shadowing trajectories of vector fields. Convergence of a numerical integration algorithm proves that it provides shadowing of trajectories for fixed, finite times. Nonetheless, the theory of these algorithms says little about the precision of a pseudoorbit required to provide an e-shadow of a trajectory. The ability to shadow trajectories for long periods of time is closely related to their Liapunov exponents (discussed in Section 2.3) and exponential dichotomies. If there are no Liapunov exponents close to zero, then an infinitesimal neighborhood of a trajectory x(t) can be decomposed into unstable directions that diverge from x(t) and stable directions that converge towards x(t). Deviations from x(t) in the stable directions (eventually) become smaller in the forwards direction while deviations from x (t) in the unstable directions become smaller in the backwards direction. Heuristically, to find an orbit shadowed by a pseudo-orbit, take the trajectory that matches the projection of the pseudoorbit onto the stable directions at its beginning and onto the unstable directions at its end. Several authors, including [28-31,88], have formalized this conceptual framework to give explicit estimates for the shadowing constants of a vector field. Consider a set of points (xk, tk), k = 0 . . . . . N, along a trajectory of the vector field f with flow 45. These points satisfy the equations
9 (xk, tk) --xk+l = 0
(3)
for = 0 . . . . . N - 1. We can view the left hand side of these equations as a map F:IR (n+l)(N+l) -+ R N. A one-step numerical method for integrating the vector field gives an approximation to this map. The analysis of Coombes et al. [30] applies Newton's method and its extensions to analyze how much the solutions of the system (3) change with perturbations of q}. To deal with the flow direction itself, these authors constrain the points xk to lie on a fixed set of cross-sections to the vector field. The important quantities in determining the shadowing data are the magnitude of a right inverse to the map F and the C 2 norm of the vector field in a neighborhood of the trajectory. The right inverse of F is not determined uniquely: there are essentially n degrees of freedom that specify a trajectory. To obtain a right inverse whose norm is relatively small, the trajectory is decomposed into its expanding and contracting directions. The contracting coordinates are chosen at the beginning of the trajectory and the expanding coordinates are chosen at its end. Using their methods, Coombes et al. [30] demonstrate shadowing of very long trajectories in the Lorenz system [ 113]. 2.3. Error estimation and verified computation Numerical integration algorithms are fundamental tools for the investigation of dynamical systems, but the results they produce are seldom subjected to verification or rigorous error estimation. Indeed, the exponential divergence of trajectories in systems with sensitive dependence to initial conditions sets limits on the time for which one can expect a numerical trajectory to remain close to the actual trajectory with the same initial condition. Naive attempts at estimating the errors of numerical integration tend to introduce artificial instability coming from varied sources such as the rectilinear geometry inherent in interval arithmetic [33]. This wrapping phenomenon amplifies the expected exponential growth of
356
J. Guckenheimer
errors, typically producing pessimistic results. This state of affairs creates a tension between simulation and the mathematical theory of dynamical systems. On the one hand, numerical integration seems necessary in the investigation of systems that do not have analytically explicit solutions. On the other hand, the difficulty in estimating the errors in these integrations makes it hard to use simulations in rigorous analysis. There has been recent progress in attacking this issue, and the number of successful examples in which numerical computation gives rigorous results about dynamical systems is growing steadily. The variational equations ~(t) - Dfx(t)~(t) of a trajectory x(t) for system (1) give an infinitesimal picture of how nearby trajectories differ. The exponential growth rates of solutions to this time varying linear system of differential equations are the Liapunov exponents of the trajectories. Their existence is discussed in the next section. The computation of Liapunov exponents must contend with two phenomena. The first phenomenon is that the rates of expansion and contraction along a trajectory may vary dramatically. This is particularly evident in canard solutions to systems of differential equations with multiple time scales [47,48,57], also discussed in the next section. The second phenomenon is that the directions of expansion and contraction may twist along a trajectory. Changes in twist are intimately involved in the bifurcations that take place in chaotic invariant sets. Both of these phenomena are common, so general algorithms for computing Liapunov exponents should take them into account. Suppose that (xk, tk) is a sequence of points along a trajectory and that Dk is the Jacobian of the flow map from (xk, tk) to (xk+l, tk+l). Denoting by al . . . . . an the singular values of Ju = D N . . . DzDo, the Liapunov exponents are defined as the limits of log(a/) / tN as N --~ oe. Thus computation of the Liapunov exponents requires computation of the singular values of Ju. Performing this computation by first computing the product and then computing the singular values is ill-conditioned in general. If the largest Liapunov exponent is separated from the remaining ones, the Ju tend to rank one matrices and small perturbations of the Di produce large relative changes in the magnitudes of its smaller singular values. To accurately compute the smaller singular values, two basic strategies have been proposed [136,152]. The first is to form exterior powers of the Jacobians that represent its action on subspaces. The dominant singular values of exterior power i will be the product of the largest i singular values, so the Liapunov exponents can be recovered from the ratios of the largest singular values of the exterior powers. The second strategy is perform a matrix decomposition of Ju by working with its factors iteratively. For example, the QR factorization of Ju can be computed by first computing the QR factorization Do = QoRo. Then one computes the QR factorization of Dl Q0 = Ql RI. Proceeding inductively, one computes Dk-.. Do = Qk Rk... R0. The inductive step is to compute the QR factorization Dk+l Qk = Qk+l Rk+l. Dieci et al. [41] have proposed a continuous analog for this factorization of Ju based upon solving Riccati equations. The goal is produce a frame, i.e., a smoothly varying set of orthogonal coordinate systems along the trajectory, so that the variational equations become triangular when transformed to this frame. The differential equations satisfied by the frame are a Riccati system for which there are special methods of numerical integration [39,111 ]. The most direct approaches to error estimation for numerical integration are based upon interval arithmetic. Numbers are replaced by intervals and operations are replaced by enclosures. For example, the sum of two intervals is an interval that contains the sum of any numbers contained in the two summands. For calculations involving a moderate number of
Numerical analysis of dynamical systems
357
operations, interval arithmetic is often an effective means of obtaining rigorous estimates for calculations. As an example, interval implementations of Newton's method often work well to give precise estimates on the location of all the zeros of a function, including proofs of their existence. Within the context of dynamical systems, Lanford's computer based proof for the existence of a fixed point for the period doubling renormalization operator on unimodal functions [ 108,109] exploits the application of interval arithmetic to Newton's method. Application of interval arithmetic to numerical integration is an old idea [33], but the results are frequently disappointing, leading to poor bounds on the computation of a trajectory compared to the apparent accuracy of the calculation. Unless the flow is uniformly contracting in the phase space, each step of an interval based numerical integration tends to produce larger enclosing intervals. The continued growth of enclosing intervals limits severely the number of time steps that can be taken before the bounds become useless. The work on shadowing described above and three additional examples illustrate ways of circumventing these limitations of interval arithmetic. The first example comes from the work of L6hner. He replaces intervals by Taylor series (or jets) augmented by bounds that enclose function values. These Taylor series with bounds are the fundamental objects with which computations are performed. Thus, a function f :R" -+ R is approximated on a domain D C R" by a polynomial P and ~ > 0 with the property that [P (x) - f (x)l < e for all x ~ D. This is a much richer class of objects than intervals, and it is possible to construct a precise numerical calculus for these objects in the context of floating point arithmetic. Lanford's numerical proof of the Feigenbaum conjectures uses these data structures [108]. Berz has implemented this calculus in his COSY software, using the term differential remainder algebra [ 15], and applied it to normal form calculations of Hamiltonian systems to achieve strong estimates of the stability properties of accelerator designs [ 115]. L6hner uses algorithms that compute Taylor series approximations of trajectories for differential equations with automatic differentiation, and then obtains error estimates for these approximations. The error estimates come from an adaptation of the contraction operator used in the Picard proof of existence of solutions to ordinary differential equations. If f : R " --+ R" is Lipschitz continuous and T is small enough, then the operator I-l(g)(t) -- xo +
f0 t f
(g(s)) ds
acting on continuous functions g:[0, T] --+ R" with g(0) = x0 has a contracting fixed point at the solution to the differential equation 2 = f (x) with initial condition x0. Bounds on T are readily computed in terms of the domain, magnitude and Lipschitz constant of f . L6hner applies this operator in the context of Taylor series with remainders to obtain good bounds on Taylor series approximations to the solution of the differential equation. This work complements the use of automatic differentiation to produce high order numerical integration algorithms based upon Taylor series. The second example of error estimates for solutions of differential equations exploits transversality in the context of planar dynamical systems. Guckenheimer and Malo [80] observed that numerical integration of rotated vector fields [54] can be used to compute curves that are transverse to the trajectories of a planar vector field. Using the terminology
358
J. Guckenheimer
of Hubbard and West [94], we expect the numerical trajectories of the rotated vector fields to be fences that provide barriers the trajectories of the original vector field can cross only once. Interval arithmetic can be used to verify that the trajectories of the rotated vector fields are indeed transverse to the trajectories of the original vector field. The advantage of this method compared to direct error estimation of trajectories is that the transversality computations are all local to individual time steps of the rotated vector field. The interval estimates for each time step are independent of one another, so the growth of the estimates does not propagate from one time step to the next. Using these ideas, Guckenheimer [75] described an algorithm to rigorously verify the correctness of phase portraits of structurally stable planar vector fields defined by functions for which interval evaluations have been implemented. The third example of rigorous results based upon numerical error estimates is the recent analysis of the Lorenz system by Tucker [ 146]. In 1963, Lorenz described the first strange attractor that was observed via numerical computation [ 113]. A more complete geometric model of the Lorenz attractor was formulated fifteen [84] years later. Verification that the assumptions underlying the geometric model are satisfied by the Lorenz system has been a benchmark problem in the numerical analysis of dynamical systems. The key assumption can be expressed as the statement that there exists a family of cones in the tangent spaces of points in the attractor that are forward invariant. Tucker has solved this problem. His work is based upon a careful dissection of a neighborhood of the attractor into regions on which the behavior of the variational equations can be described with interval computations. The interval analysis itself does not need to be precise once a suitable covering of the attractor has been constructed.
3. Computation of invariant sets Invariant sets with complex geometry are common in dynamical systems. The complexity comes both in the local structure of the sets and in convoluted shapes of smooth objects. Smale's horseshoe [ 141] is an important example of a fractal invariant set for a discrete time dynamical system. The analog of the horseshoe in continuous time dynamical systems is the solenoid [140]. The stable and unstable manifolds of periodic orbits in the horseshoe and solenoid are folded, with regions of arbitrarily large curvature. The Lorenz system [ 113] has been a rich source of complex geometric objects, including the convoluted, two dimensional stable manifold of the origin and its fractal, chaotic attractor. The algorithmic aspects of computing invariant sets is a relatively new subject compared to numerical integration. The list of successful methods for directly computing invariant sets has been growing. This section surveys research on computing four types of invariant sets: periodic orbits, invariant tori, stable and unstable manifolds of equilibria and chaotic invariant sets.
3.1. Periodic orbits
Aperiodic orbit of a flow ~bis a non-equilibrium trajectory x(t) with x(0) = x(T) for some T > 0. The minimal value of T is the period of the orbit. Perhaps the most common way of
Numerical analysis of dynamical systems
359
finding stable periodic orbits is to identify them as the limit sets of trajectories computed by numerical integration. However, there are circumstances in which numerical integration does not yield an accurate representation of a stable periodic orbit. An example is given below. There are also circumstances in which theoretical considerations suggest that the computation of periodic orbits with numerical integration may fail. A one-step numerical integration method with fixed steps is a diffeomorphism, and periodic orbits of flows become invariant curves of the time h map ~bh of the flow. The theory of normal hyperbolicity implies that if the periodic orbit is hyperbolic, then the map defined by a numerical integration algorithm will have an invariant curve near the periodic orbit if it is a sufficiently accurate approximation of ~b/,. On this invariant curve there may be resonance, with numerical trajectories converging to a stable, discrete periodic orbit with a finite number of points rather than filling the periodic orbit densely. This cannot happen for ~b/, if h is incommensurate with the period. When T is a multiple of h, the periodic orbit is a continuous family of periodic orbits of 4~/1.This qualitative discrepancy between the generic behavior of a numerical integration algorithm and the flow map seldom impedes the identification of stable periodic orbits as the limits of numerical trajectories. Nonetheless, when trying to compute periodic orbits whose stability is weak enough, normal hyperbolicity breaks down and the numerical algorithm may acquire more complex limit sets close to the periodic orbit. In particular, using numerical integration to accurately identify the location of saddle-node bifurcations of periodic orbits is problematic. It is desirable to have direct methods for locating periodic orbits for at least three reasons: 9 Numerical integration may fail as described above. 9 Direct methods may be more efficient than numerical integration for computing periodic orbits. 9 Unstable periodic orbits are not readily obtainable as limit sets of trajectories. The equations defining periodic orbits are boundary value problems for ordinary differential equations. Most of the extensive literature and software dealing with boundary value problems applies to two point boundary value problems with separated boundary conditions [9]. While the equations for periodic orbits can be recast in this form by enlarging the dimension of the phase space, this approach has not been successfully applied to many problems. Instead, most studies of periodic orbits use algorithms that are specifically designed for the solution of boundary value problems with periodic boundary conditions. There are two methods that dominate these studies: simple shooting methods and the collocation method implemented in the computer code AUTO [50]. For these methods to work well, the periodic orbit should itself be robust with respect to perturbation: the periodic orbit should vary continuously with deformations of the vector field. A sufficient condition for this robustness can be formulated in terms of the monodromy matrix of the orbit y. The monodromy matrix A of a point x ~ y is the Jacobian of the time T flow map at x. The monodromy matrix A always has 1 as an eigenvalue (with f ( x ) as eigenvector), but if 1 is a simple eigenvalue of A, then the periodic orbit perturbs smoothly with perturbations of f . A periodic orbit for which 1 is a simple eigenvalue of A is called regular. The periodic orbit equations of a vector field do not have isolated solutions. If Y(t) is a periodic orbit and c 6 R, then 9/(t + c) is also a periodic orbit. To obtain a regular system of equations for points approximating a periodic orbit, this degeneracy coming from
360
J. Guckenheimer
translation in time must be removed. In s i m p l e s h o o t i n g methods, this is typically done by restricting initial conditions to lie in a cross section to the periodic orbit. The return m a p for the cross section is defined by mapping each point to the next point on its trajectory lying in the cross section. Simple shooting methods compute the return map using a numerical integration algorithm. This is augmented by using a root finding algorithm such as Newton's method to compute a fixed point for the return map. Implementing simple shooting methods is straightforward, but their performance is subject to numerical limitations that are explained below. There have been many implementations of simple shooting methods, for example in the code LOCBIF [ 102]. There is one detail worth noting. Computing the return map requires that the intersection of a trajectory with the cross-section be computed. Many numerical integration algorithms do not yield values at intermediate points of a trajectory between time steps with the same accuracy as those at the time steps. In this case, interpolation using several computed points of the trajectory or a change of time step that yields a point on the trajectory can be used to complete the calculation of the return map. If the cross-section is given by the equation xk = c, E. Lorenz observed that one can rescale the vector field by dividing by its kth component to obtain a vector field near the cross-section in which the kth component evolves with unit speed. Choosing the time step for the rescaled vector field to be c - xk gives a time step that ends on the cross-section. The numerical difficulties with simple shooting come from two sources. The first source of difficulty is the accuracy of the return map. Newton's method requires the Jacobian J of the return map. If J is computed with finite differences, this can make application of Newton's method to the return map erratic. The second source of difficulty with simple shooting is due to the potential ill-conditioning of the problem. The return map may have a Jacobian with very large norm at the intersection of a periodic orbit with a cross section. This norm can readily become large enough that changes in initial condition of unit precision produce changes in the value of a return map that are larger than a desired error tolerance in the fixed point procedure used to locate the periodic orbit. In the canard example discussed below, integration over part of the cycle produces an extremely ill-conditioned flow map. While simple shooting works with many problems despite these potential difficulties, more elaborate methods for computing periodic orbits are often required. Multiple shooting algorithms address the difficulties associated with ill-conditioning of the return map. Instead of solving the single equation q~(x, t) = x for a fixed point of the return map, one seeks a set of points (xk, tk), k = 0 . . . . . N, with to = 0, x u = xo and 9 (xk, tk+l -- tk) = xk+l for k = 0 . . . . . N - 1. This forms a system of n N equations in (n + 1) N variables. For a regular periodic orbit, there is a smooth N dimensional manifold of solutions coming from different choices of xk on the periodic orbit. Multiple shooting algorithms either constrain the (xk, tk) to lie in a set that yields a unique point on the periodic orbit, or they augment the system of equations to yield a regular system of (n + 1)N equations. Conceptually, multiple shooting is simple. By judicious choice of the length of segments along the periodic orbit, the condition number of the system of equations q~(xk, tk+l - tk) -- xk+l can be reduced to manageable levels on problems where simple shooting fails completely. We illustrate this with an example. Problems with multiple time scales are especially prone to ill-conditioned return maps since the periods of the periodic orbits may be very long when measured in the faster time scales of the problem. The following example exhibits stable periodic orbits that cannot be
Numerical analysis of dynamical systems
361
computed readily with numerical integration or a simple shooting method. These orbits are examples of trajectories called canards due to their visual appearance in a family of vector fields that generalizes the van der Pol equation [47,48]. The vector field 2 - x 3),
1
y~a~x is a translate of the van der Pol equation when a = - 1 / 3 and has two time scales when s > 0 is small. The single equilibrium point at (a, a 2 -Jr-a 3) undergoes supercritical Hopf bifurcation at a = 0 with decreasing a. Figure 1 shows periodic orbits from this family with s = 0.001, computed with a multiple shooting algorithm based upon automatic differentiation. The periodic orbits that emerge grow very quickly in a to a relaxation oscillation approximated by a pair of segments that follow the nullcline y -- x 2 + x 3 and a pair of horizontal segments that are tangent to the nullcline. The growth of the periodic orbits occurs during an interval of a whose width shrinks to zero proportionally to e x p ( - 1/e) [47]. The cycles of intermediate size in the family have a segment that follows the unstable middle portion of the nullcline with x e ( - 2 / 3 , 0). In this region, trajectories of the vector field diverge rapidly from one another at a rate comparable to e x p ( - 1/e). This divergence makes it essentially impossible to compute a trajectory that follows the nullcline using numerical integration forwards in time with double-precision (64 bit) floating point arithmetic. Starting near the local minimum of the nullcline, an error in the computation of one step comparable to the unit precision of the floating point arithmetic produces a point whose tra0.18 0.16 0.14 0.12 0.1 0.08 0.06
0.04 0.02
_0.021
-1
J
-0.8
I
-0.6
,
-0.4
I
-0.2
I
0
I
0.2
I
0.4
Fig. 1. Periodic orbits of the extended van der Pol equation. The orbits which follow the middle, unstable branch of the "slow" manifold are canards.
362
J. Guckenheimer
jectory will leave a moderate sized neighborhood of the nullcline in a time comparable to 50e, the factor 50 being approximately the logarithm of the unit precision. For e = 0.001, this time is approximately 0.05, only long enough for y to travel a short distance up the nullcline at the rate I~1 - a - x. Consequently, forward numerical integrations of trajectories appear to "peel off" from the unstable portion of the nullcline without traveling very far along it. Varying a appears to produce almost a discontinuity in the numerical co-limit sets. Attempts to find the canard solutions with Runge-Kutta algorithms find a narrow interval of a of width comparable to 10-14 in which the integration algorithm becomes chaotic, erratically producing a combination of small and large loops along the same numerical trajectory. Such a trajectory is illustrated in Figure 2. Thus, despite the fact that the canard cycles are stable, they cannot be computed readily with numerical integration. Guckenheimer et al. [77,81 ] have been developing new algorithms for the computation of periodic orbits based upon the use of Taylor series and automatic differentiation. Automatic differentiation is used to achieve high orders of accuracy while maintaining coarse meshes and relatively small systems of equations to solve. We describe here the multiple shooting 0.2
-0.02 0.4
Fig. 2. Fourth order Runge-Kutta integration of the canard vector field. Due to the massive instability of the unstable branch of the slow manifold, the integration is unable to compute trajectories that follow this branch. Compare with the family of canards shown in Figure 1.
Numerical analysis of dynamical systems
363
algorithm used to produce Figure 1. Approximations to the periodic orbit are parametrized by a discrete mesh of points (xk, tk) near the periodic orbit, including the times associated to these points. Numerical integration from one mesh point to the next is performed using Taylor polynomial approximations to the trajectories, with step sizes chosen adaptively so that estimated errors of the trajectory lie below a predetermined threshold. The Taylor series and the Jacobians of the Taylor series coefficients with respect to variation of the mesh point are computed using procedures that are part of the program ADOL-C developed at Argonne National Laboratory [73]. The variational equations for the orbit are solved along with the original differential equation. The system of equations q~(xk, tk+l -- tk) = xk+l, k - - 0 . . . . . N, is augmented with N additional equations. These additional equations express constraints that force updates of (xk, tk) to be orthogonal to the trajectory of (xk, tk) in IK''+l . The tangent vector to this trajectory is given by ( f (xk), 1). (In the case of k = 0 where we fix to = 0, the times tl . . . . . tN -- 1 are varied instead of to.) For a regular periodic orbit, the augmented system of equations is regular and Newton's method is used to solve it. The algorithm requires an initial approximation to a periodic orbit as starting conditions, say a set of points obtained from a numerical integration. New mesh points are created adaptively when the norm of the Jacobian from the previous mesh point exceeds a specified bound. Mesh points are removed when the remaining points adequately represent the periodic orbit. Continuation, described in the next section, is easily implemented in this algorithm. Automatic differentiation is used to compute derivatives of the Taylor series coefficients with respect to parameters as well as with respect to the phase space variables. A parameter is regarded as an additional independent variable in the augmented system of equations. Continuation steps are taken by computing the tangent vector to the curve of solutions of the augmented equations and adding an increment of this tangent vector v 6 ]K('7+l)x+l to the current solution. Yet one more equation is added to the augmented system, constraining Newton updates to be orthogonal to the tangent vector v. Global boundary value methods for computing periodic orbits project the equation ~(t) = ( 1 / T ) f ( v ( t ) ) onto finite dimensional approximations of the space f" of smooth functions v : S l ~ •". Alternatively, we can try to solve ~(t) -- f ( v ( t ) ) for curves with ~, (0) = V (T). In both alternatives, the period T is an unknown that is part of the equations to be solved. The global method used in the code AUTO [52,53] is collocation. The approximations to/-" consist of continuous, piecewise polynomial functions. A discretization of V is determined by a mesh of N points (xl . . . . . xu) and N time intervals t l . . . . . tx. Inside each of the N mesh intervals k collocation points are chosen. In AUTO, as well as the boundary value solver colsys and its descendants [9,52,53], the collocation times for each mesh interval are at Gauss points in order to produce superconvergence of the method. The polynomial function on each mesh interval is required to satisfy the differential equation at the collocation points and to be continuous at the endpoints of the mesh intervals. For an n dimensional system, this yields a total of n x N x (k + 1) independent equations on the same number of variables. The orbit period is one additional independent variable, and it is balanced by an equation that removes the degeneracy associated with time translation. This can be done by restricting a point of the orbit to a cross section or it can be given by an integral phase condition in the form f g ( v ( s ) ) d s = 0 for a function g :]K'7 --+ R. The system of n x N x (k + 1) + 1 equations defined by the collocation algorithm is quite large. Fortunately, the Jacobian of this system is sparse. AUTO exploits the sparsity using
J. Guckenheimer
364
a special Gaussian elimination procedure in its Newton iterations to obtain solutions of the periodic orbit equations. The accuracy and efficiency of the Taylor series methods are demonstrated in the following example. The planar vector field .~ __ y _ y 2 _ X (X 2 -- y 2 +
2y3/3 + c),
5~ -- x + (y - y2)(x 2 _ y2 + 2y3/3 + c) has a periodic orbit that lies in the zero set of the polynomial h - x 2 - y2 _+_2y3/3 + c when c E (0, 1/3). The value of h along a computed curve measures the distance of the curve from the periodic orbit. Figure 3 displays values of h along approximate periodic orbits with c = 0.07 and period approximately 7.7 computed in three ways. The top panel presents values of h at the 60 mesh points of an AUTO calculation of the periodic orbit. The data is representative of the most accurate approximations to the orbit produced by
1
x 10 -1~
Collocation Errors
,
I
I
[
I
I
I
0.5
-0.5 -1
-1
I
0 0.1 x 10 -14
0 x 10 -15 I
--1
0
I
I
0.2
0.3
I
0.4 0.5 0.6 Runge-Kutta Integration Errors
I
I
I
0.7
0.8
0.9
I
I
I
I
I
I
I
1
2
3
4
5
6
7
I
Multiple Shooting/Automatic Differentiation Errors I
1
I
I
I
I
I
I
I
I
I
I
J
1
2
3
4
5
6
7
8
9
Fig. 3. Three different methods have been used to compute a periodic orbit that lies along the level curve h = 0.07 of the polynomial h = x 2 - y2 + 2y3/3. Values of h are plotted as a function of time during one traversal of the periodic orbit. The numerical periodic orbit in the top panel was computed with AUTO, the three in the middle panel with a fourth order Runge-Kutta method, and the bottom one with a multiple shooting algorithm employing automatic differentiation.
Numerical analysis of dynamical systems
365
AUTO while varying the number of mesh points, the number of collocation points and the error tolerances allowed by the algorithm. The middle panel shows three numerical trajectories computed with a fourth order Runge-Kutta algorithm using step sizes of fixed lengths 0.00125, 0.001 and 0.0001. The step size 0.001 appears to provide close to optimal accuracy for this method, with round-off errors apparently dominating truncation errors for smaller step sizes. The lower panel displays the results of a calculation using a multiple shooting algorithm based on automatic differentiation. There are five mesh intervals with the solution approximated on each half of a mesh interval by the degree 16 Taylor series polynomial at the boundary mesh points. Convergence was obtained in 6 Newton steps starting with mesh points that are far from the computed solution. The maximum value of Ihl in the three calculations is approximately 6 x 10 - l l , 8 x 10 -15 and 6 x 10 -16 The Taylor series methods achieve the best accuracy, comparable to the inherent precision of the floating point arithmetic, with surprisingly coarse meshes. Further development of methods based upon Taylor series appears to be very promising. 3.2. lnvariant tori Invariant tori are a prominent feature of symplectic flows and also arise through Hopf bifurcation of periodic orbits in dissipative systems. For flows with a global cross-section on a two dimensional torus, a fundamental invariant is the winding number, or equivalently the rotation number of a return map [90]. This invariant is rational if and only if the flow has periodic orbits. If the flow is C 2 and the winding number is irrational, then all trajectories of the flow are dense [38]. KAM theory [90] and the theory of normal hyperbolicity [93] provide theoretical tools for the analysis of invariant tori. There is a modest body of research on algorithms for computing these objects, much of it framed in the context of invariant curves of discrete time systems. Three different approaches, quite different from one another, are discussed here. The first approach to computing invariant tori of discrete maps has been to represent one dimensional tori as graphs of functions and to formulate a system of equations that gives a finite dimensional approximation to the invariance of these curves. This approach has been pursued in different ways. KAM Theory restricts attention to invariant tori on which the motion is conjugate to irrational rotation and solves for the Fourier series of the conjugacy. In the case of invariant curves, piecewise polynomial approximations of invariant curves lead to general algorithms that apply to invariant curves that contain periodic orbits as well as tori that have irrational rotation numbers. Implementations of such methods have been described by Kevrekidis et al. [ 101 ] and van Veldhuizen [ 147]. Their results indicate that it is difficult numerically to follow a family of invariant tori to the point at which they begin to lose smoothness and disappear. Aronson et al. [8] give a comprehensive description of ways in which tori with rational winding numbers can lose smoothness. The second approach to computing invariant tori was pioneered by Greene [72]. This method seeks to compute invariant tori in symplectic systems by approximation with periodic orbits. Most of the research has concentrated on area preserving diffeomorphisms of the plane. KAM theory proves that each periodic orbit of elliptic type is surrounded by a family of invariant curves with irrational rotation numbers satisfying Diophantine inequalities [72,155]. Each of these invariant curves is the limit of periodic orbits whose
366
J. Guckenheimer
rotation numbers are obtained by truncating the continued fraction expansion of the irrational rotation number. Periodic orbits of high period are computed with root finding algorithms analogous to either shooting or global boundary value methods. Estimates of the convergence of the approximating periodic orbits to the (unique) invariant measure of the invariant curve gives information about the structure of the invariant curve. If the diffeomorphism depends upon a parameter, some of the invariant curves may evolve into Cantor sets. Renormalization methods have been applied to study this transition, especially for invariant curves for the golden mean and other rotation numbers with periodic continued fraction expansions [ 110]. The numerical computations of these "last" invariant curves have been based upon computations of approximating periodic orbits. Dieci et al. [42-45] have investigated the computation of invariant tori for vector fields. Their starting point has been the formulation of a partial differential equation that implies the invariance of the torus. This partial differential equation states that the vector field is tangent to the torus. The innovative aspects of these studies lie in using algorithms for solving PDE's to address this problem. The torus is represented as the image of a mapping on a discrete grid, and then partial differential equations are approximated to yield a set of equations for this mapping analogous to global methods for computing periodic orbits. Implementations of the algorithms have been tested on a few examples like the forced van der Pol equation, but experience as to the domain of problems for which these algorithms work well remains limited.
3.3. Stable and unstable manifolds Stable and unstable manifolds of equilibrium points and periodic orbits are important objects in phase portraits. In physical systems subject to disturbances, the distance of a stable equilibrium point to the boundary of its stable manifold provides an estimate for the robustness of the equilibrium point. The closer the boundary, the more likely disturbances will kick the system out of the basin of attraction of the equilibrium. In the simplest situations, these boundaries are formed by stable and unstable manifolds of saddles. In more complex situations, the basin boundaries are fractal, chaotic invariant sets containing large numbers of periodic orbits and their stable manifolds. Thus, there is great interest from both theoretical and practical perspectives in computations of stable and unstable manifolds. From a naive perspective, it would appear that the computation of stable and unstable manifolds of equilibria is no more difficult than numerical integration. For one dimensional manifolds this is true. One dimensional stable and unstable manifolds of equilibria of flows consist of pairs of trajectories, so their computation can be implemented by applying an initial value solver to a well chosen initial condition. Higher dimensional stable and unstable manifolds are harder to compute. The two dimensional stable manifold of the origin for the Lorenz system [113] 2-
lO(y-x), - 28x-y-xz, 8 -- - - ~ z + x y
Numerical analysis of dynamical systems
367
has served as a benchmark problem. There are two difficulties in computing this manifold. First, the stable eigenvalues at the origin of this system are approximately - 2 . 6 7 and - 2 2 . 8 with a ratio that is approximately 8.56. As a result, backwards trajectories in the manifold tend to flow parallel to the strong stable direction. Numerical integration of initial conditions in the stable manifold uniformly clustered near the origin produces only a strip along the strong stable direction. The second difficulty in computing this stable manifold is that it becomes highly convoluted far from the origin. Part of the manifold spirals around the z-axis while part of it curls around the stable manifolds of the equilibria located at (-+-6 x/2, -+-6x/2, 27) [126]. Symbolic methods can be used to compute high order approximations to the Taylor series of stable and unstable manifolds at equilibrium points. One approach to these algebraic calculations is to subsume the computation of stable and unstable manifolds of equilibria into the linearization problem: finding a smooth coordinate transformation that transforms the system 2 = f (x) into a linear system of equations near an equilibrium. In the transformed coordinates, the stable and unstable manifolds are linear subspaces. Formally, the linearization problem can be reduced to a sequence of systems of linear equations for the Taylor series of the coordinate transformation [78]. These linear systems degenerate if the eigenvalues )~i at the equilibrium satisfy resonance conditions of the form il
)~i -- ~
aj)~j
j=l
with non-negative integer coefficients aj. The order of the resonance condition is ~ aj. When resonance conditions are satisfied, transformation to normal forms containing only nonlinear terms associated with the resonance conditions can still be accomplished but the system can only be linearized with finite smoothness related to the order of the resonance conditions [96]. Transformation to simpler nonlinear systems, called normal forms, is used extensively in the analysis of bifurcations [78,131]. Algebraic computation of linearizations and normal forms are readily implemented in symbolic systems for vector fields of moderate size [133]. Nonetheless, the complexity of these computations grows quickly with problem size. For large problems, instead of computing a full linearization, one would like to extract more limited information. Problems are common for which almost all modes are highly damped and a low dimensional submanifold in the phase is attracting. These problems often arise from investigations of instability when a system is driven by external forces until its attractors are time dependent, but not highly disordered. Beyn and Kless [ 17] have examined the computation of low dimensional invariant manifolds within this context. They study the use of iterative methods in linear algebra to compute the location and normal forms of invariant manifolds while avoiding such operations as the factorization or inversion of the full system Jacobian at an equilibrium. The most complete work on computing stable and unstable manifolds has been done in the context of one dimensional stable and unstable manifolds of fixed points of discrete time dynamical systems. These methods have been applied to the return maps of periodically forced continuous systems and to computation of two dimensional stable and unstable
368
J. Guckenheimer
manifolds of periodic orbits [24]. One dimensional stable and unstable manifolds of fixed points for maps have fundamental domains: if the eigenvalue of the manifold is positive, each half of the manifold is the union of iterates of a segment joining a point to its image. Moreover, the manifold lies close to its tangent near the fixed point. Thus an initial approximation of the manifold can be obtained by iterating points that lie in a small fundamental domain of the linearized map of the fixed point. However, this procedure does not always give a well resolved approximation to the manifold because the points may separate from one another as they iterate away from the fixed point. Algorithms that avoid this difficulty have been implemented [ 104]. Yorke et al. [ 114] have used a divide and conquer algorithm to compute one dimensional stable and unstable manifolds of saddles in two dimensional maps. These straddle algorithms locate a stable manifold by finding segments whose endpoints iterate towards the saddle point and then proceed in opposite directions along the unstable manifold of the saddle. Continuity implies that a point of the segment lies in the stable manifold. Iteratively following the midpoint of the segment and selecting the half that straddles the stable manifold, the intersection of the stable manifold with the segment can be located precisely. The method is inherently very robust, but it does not emphasize computational efficiency. Recently, Osinga and Krauskopf [ 104] have described a different procedure to compute one dimensional stable and unstable manifolds. Some research has been done on the global computation of two dimensional stable and unstable manifolds of equilibria for flows. Several different strategies have been used with reasonable success on such problems, all tested with the stable manifold of the origin in the Lorenz system. Johnson et al. [97] rescaled the vector field so that it had constant length. This approach makes trajectories advance at uniform speed, but their direction continues to follow the strong unstable manifold. Guckenheimer [85] experimented with computation of the geodesic rays in the induced metric of the stable manifold. This procedure appeared to work well, but developed numerical instabilities far from the equilibrium. Osinga [ 125] and Osinga and Krauskopf [ 104] have developed methods based upon the graph transform. The graph transform is an operator that is used to prove the stable manifold theorem, and Osinga in her thesis implements methods that follow closely the proof. As the Lorenz system stable manifold grows, it acquires complex folds and twists [126]. Tracking the manifold through these folds and twists has been difficult. The graph transform methods are based upon a decomposition of the phase space into a product of linear stable and unstable manifolds near the equilibrium, but the manifold does not remain transverse to the unstable manifold of the equilibrium. Therefore, an adaptive set of coordinate systems is required to track the manifold as it turns. In the methods of Guckenheimer and Johnson, the manifold is computed as a set of curves that bound a growing disk in the manifold. These curves grow in length quickly enough that an interpolation procedure that places new points on the curves as they grow is required to resolve the stable manifold adequately. In places where the manifold develops sharp folds, it becomes difficult to perform this interpolation accurately. A complementary method for computing the stable and unstable manifolds of low dimensional systems similar to the straddle algorithms of Yorke et al. was implemented by Dellnitz and Hohmann [37]. To compute a compact portion of the manifold, a region in phase space is partitioned and each partition element is marked as to whether it might intersect the desired manifold. Starting with a coarse partition, many partition elements can
Numerical analysis of dynamical systems
369
usually be marked as not containing an intersection point. These are discarded, and the remaining elements of the partition are refined and then tested to see whether they intersect the manifold. The number of rectangles in successive refinements that must be tested depends on the dimension of the manifold being computed rather than on the dimension of the phase space, so the methods appear feasible for two dimensional manifolds of rather large systems. Doedel [51 ] has suggested yet another procedure for computing stable and unstable manifolds based upon the solution of boundary value problems. The idea advanced by Doedel is to formulate an iterative procedure in which each step is the solution of a two point boundary value problem. If W is the invariant manifold and U C W is a neighborhood of the equilibrium point that has been determined, then one wants to compute a larger neighborhood of the equilibrium in W. The boundary value solver end point conditions for one end of the interval will be chosen so that the end point of the desired trajectory lies on the boundary of U. If W has dimension d, then these boundary conditions have dimension d - 1. The other end point is required to lie on a specified manifold V transverse to W. If V has complementary dimension to W, one more boundary condition is needed. This can be obtained either by enlarging the dimension of V or by allowing the transit time from one end point to the other to vary. The latter strategy is similar to that used by a boundary value solver to obtain the period of a periodic orbit by fixing its length in time while rescaling the vector field with a free parameter. Robust implementations of algorithms to compute two dimensional stable and unstable manifolds of equilibria have not yet been achieved. The work described above reveals some of the obstacles that have been discovered. These obstacles appear surmountable. Recent improvements in computers should make methods feasible that previously required too much floating point computation or memory use. Better adaptive methods to discretize the intricate geometry of two dimensional stable and unstable manifolds are needed before we will have general purpose codes that reliably compute two dimensional stable and unstable manifolds of equilibria.
3.4. Chaotic invariant sets Chaotic invariant sets have been the focus of a large amount of dynamical systems research. Chaos is a term that has come to mean any type of asymptotic dynamics more irregular than quasiperiodicity. Numerous papers have made the claim that chaos occurs in a particular system, but most of these claims are based only upon visual observation of numerical trajectories. Infrequently, the claims are substantiated with arguments demonstrating that the system has a property that implies the existence of chaos. The strongest criterion for the existence of chaos is the existence of horseshoes in discrete systems or solenoids in flows [ 140]. These are invariant sets which are topologically equivalent to subshifts offinite type in the case of discrete time and their suspensions in the case of flows. All of these objects have been extensively studied from measure theoretic and statistical viewpoints. They carry invariant measures which are ergodic and have positive entropy and Liapunov exponents [59,158].
370
J. Guckenheimer
Horseshoes and solenoids vary continuously with C l perturbations of a map or flow, lending credence to numerical observations of chaotic structure. The Smale-Birkhoff Homoclinic Theorem [140] gives a necessary and sufficient criterion for the existence of horseshoes for diffeomorphisms, namely that there are transversal intersections of stable and unstable manifolds of a periodic orbit. Application of this theorem to return maps of a flow gives the same result there. When stable and unstable manifolds of periodic orbits can be calculated, this result gives a procedure for verifying the existence of chaotic dynamics in a system. The Melnikov method [78,132] gives criteria for perturbations of nontransversal homoclinic orbits of periodic orbits to become transversal as a system is deformed. Note, however, that many examples have intersections of stable and unstable manifolds in which the angles of intersection are small, making numerical verification of chaotic dynamics difficult [78]. This is especially true in Hamiltonian systems [ 123] where Melnikov theory applied to resonant layers of nearly integrable systems fails. Asymptotic analysis of these systems reveals that the angles between stable and unstable manifolds in these layers is "beyond all orders" of the perturbation theory [ 135]. Simo and his collaborators have investigated carefully several Hamiltonian systems arising in celestial mechanics, including the restricted three body problem [139]. They have made significant strides in demonstrating the existence of very small transversal intersections between stable and unstable manifolds of periodic orbits. Although numerical evidence is often used to substantiate claims of chaotic behavior, this evidence can be unreliable. One step numerical integration algorithms with fixed time step h define maps that approximate the time h maps of flows. There is a notable qualitative difference between these objects, namely that the trajectories of flows are one dimensional curves while the trajectories of the numerical integrators are sequences of points. Homoclinic orbits of an equilibrium point for a flow cannot be transverse because the stable and unstable manifolds have complementary dimension and any intersection has dimension at least one. The numerical method will have a fixed point near the equilibrium with stable and unstable manifolds of the same dimensions as those of the flow. However, their intersection can be zero dimensional since the trajectories of the numerical method are sequences of points rather than curves. Indeed, the Kupka-Smale Theorem states that for a generic set of maps, homoclinic intersections of periodic points will be transverse [ 140]. Thus numerical integration can be expected to introduce chaotic behavior to simulations of dynamical systems that cannot have chaotic behavior. The canard example in the previous section displays this property in a slightly different setting. The scale on which such chaos occurs is frequently small, but claims for chaos in a dynamical system based upon observations of a numerical simulation should be bolstered by additional analysis. Conversely, chaotic dynamics is sometimes difficult to observe in simulations of systems that are indeed believed to be chaotic. Guckenheimer et al. [ 103] studied an example of this kind in a family of diffeomorphisms of the two dimensional torus. Investigating resonances in these maps, they discovered the presence of codimension two Takens-Bogdanov bifurcations. Generic two parameter families of maps that undergo Takens-Bogdanov bifurcation have nearby parameters at which a saddle has transversal intersections of its stable and unstable manifolds. In the example investigated by Guckenheimer et al., the region in which this behavior was found was very, very small - a strip of width less than 10-l0 in a problem for which the parameter space is naturally the unit square. Moreover, the angle be-
Numerical analysis of dynamical systems
371
tween the manifolds became large only in very small neighborhoods of the periodic orbit. Without a systematic search, the chaotic behavior in this family is difficult to find. Similar phenomena occur in the analysis of unfoldings of bifurcations of flows. Two parameter families of flows near codimension two bifurcations of equilibria with a zero eigenvalue and a pair of pure-imaginary eigenvalues have chaotic dynamics in a persistent manner. However, truncated normal forms of these bifurcations do not have chaotic dynamics and once again the angles of transverse intersections of stable and unstable manifolds are initially very small. Thus the failure to detect chaos in numerical simulations does not always mean that it is not present. Compare the study of toral maps by Yorke et al. [71 ] with the torus maps described above as an example where chaos is almost certainly present but hard to stumble across. The existence of chaotic attractors has been a subject of intense theoretical investigation. Structurally stable chaotic attractors have uniform hyperbolic structures [140], but it is apparent that many examples which appear to have chaotic attractors cannot have uniform hyperbolic structures on these attractors. The most studied discrete system of this kind is the Henon attractor [89]. Beginning with the theory of iterations of one dimensional mappings [36], an understanding of the properties of chaotic attractors that do not have uniform hyperbolic structures has begun to emerge. Benedicks and Carleson [ 11 ] proved that there are families in which non-uniformly hyperbolic attractors occur on parameter sets of positive measure. Their theory and its extensions [ 12] lend credibility to the belief that chaotic dynamics observed in numerical simulations does indicate that the underlying system has a chaotic attractor. One of the principal theoretical tools for investigating uniformly hyperbolic invariant sets has been the concept of Markov partitions [20]. These partitions lead immediately to representations of these invariant sets as images of subshifts of finite type by maps for which most points have a single preimage. From a statistical perspective, the invariant sets behave like subshifts of finite type. Anosov diffeomorphisms are defined to be diffeomorphisms with dense trajectories and uniform hyperbolic structures on a compact manifold. For two dimensional Anosov diffeomorphisms, the elements of Markov partitions are rectangles whose boundaries are smooth segments of stable and unstable manifolds [3]. In odd dimensions, the boundaries of Markov partitions of Anosov diffeomorphisms are always fractal [21,26]. Algorithms to compute these partitions have only recently been studied [100,137]. The work thus far has been restricted to linear Anosov diffeomorphism of the torus and is heavily dependent on algebraic constructions. There are several phenomena that occur in other examples of chaotic attractors that highlight the bewildering complexity of dynamical systems. One such phenomenon is partial hyperbolicity. Higher dimensional attractors may exhibit partial hyperbolicity in which the dimensions of the unstable manifolds of points are always positive, but vary from point to point. Abraham and Smale [2] described an early example of this phenomenon. More recently, Pugh and Shub [ 127] and others have devoted renewed attention to the analysis of partial hyperbolicity. Numerical investigations of partial hyperbolicity have hardly begun. A second complex phenomenon is riddled basins of attraction [4] in which two or more invariant sets have positive measure "domains" of attraction that are densely intertwined. Every open set that contains points tending to one of these invariant sets also contains points tending to another invariant set. In these circumstances, there appears to be an in-
372
J. Guckenheimer
herent unpredictability about the limit behavior of initial conditions in large regions of phase space.
3.5. Statistical analysis of time series The numerical analysis of chaotic dynamics has dealt with the statistical properties of invariant sets as well as with algorithms for locating the sets and describing their basins of attraction. Most of the statistical methods are based upon ergodic theory [99] and formulated in terms of invariant measures. From this perspective, the analog of topological transitivity for invariant sets is ergodicity of invariant measures. Hyperbolic invariant sets support many ergodic invariant measures, including the measure theoretic limits N - 1 6 ( F i (x)) of atomic measures along trajectories tending to the invariant set. lim ~1 ~ i-0 These limit measures are frequently called the time averages of the trajectories. They do not always exist, even for almost all initial conditions, as has been demonstrated for one dimensional mappings [79]. For attractors, special emphasis has been given to natural measures, defined as the limits attained from sets of initial conditions having positive Lebesgue measure. For hyperbolic attractors, these natural measures are the SBR (Sinai-Bowen-Ruelle) measures characterized by a variational principle [58]. The convergence of trajectories to measure theoretic limits has been investigated for various examples [13,14]. Three important statistics of ergodic attractors are their entropy, Liapunov exponents and dimension [ 156,157]. Computation of entropy has received relatively little attention compared to computation of Liapunov exponents and dimension. Most algorithms to compute these quantities use data from trajectories, and the methods have been applied to observational data as well as simulations. Nonlinear time series analysis based on these methods provides tools that help assess whether a system might be modeled effectively by one with a low dimensional chaotic attractor. Reconstruction of attractors and construction of models from a scalar time series is a topic that has been extensively studied. The theoretical basis for methods of recovering attractors from one dimensional data was studied by Takens [ 145] who formulated adaptations of the Whitney Embedding Theorem [92]. This theorem states that generic mappings of an n dimensional manifold into a manifold of dimension 2n + 1 are embeddings. Extensions of the theorem have been used to justify the view that the method of time delays can be used to embed a chaotic attractor of dimension d into IKk when k > 2d. The method begins with a scalar time series of observations yi that are assumed to be values of the function y at points x(i A) sampled along a trajectory of the attractor. Vectors of the form (Yi, Yi+l . . . . . Yi+lk) are used as observations of the map Ek(x) = (y(x), y ( x ( l A ) . . . . . y ( x ( l k A ) ) . Takens [145] demonstrates that for a generic observable y, attractor of dimension d and k > 2d, Ek is a 1 - 1 map of the attractor into •k. Procedures for choosing l and k to obtain reliable estimates of the dimension of an observed attractor have been extensively investigated. The accuracy of the methods tends to degrade rapidly with the dimension of the attractor [74]. Liapunov exponents measure the exponential rates of growth of solutions of the variational equations of a vector field. Oseledec [124] proves their existence as measurable functions with respect to any invariant measure. Consequently, the Liapunov exponents of an ergodic measure are invariants of the measure. If xt is a trajectory of the vector
Numerical analysis of dynamical systems
373
field ~ = f ( x ) in Euclidean space R", then the variational equations of f along xt are -- Df~., (~), a nonautonomous system of linear differential equations. Its fundamental solution 3 (t) is the matrix solution with initial condition ,T,(0) = I, the identity matrix. Denoting cri (t) the singular values of ,E (t) in decreasing order, the Liapunov exponents of xt are defined to be liminf(1/tlog(cri(t))). Positive Liapunov exponents indicate that there are nearby trajectories that diverge from xt at an exponential rate. Computation of the largest Liapunov exponent is straightforward: cri (t) is comparable to 113 (t)ll. Determining smaller Liapunov exponents is more difficult because, when the largest Liapunov exponent is simple, Z (t)/ll ,T,(t)ll tends to a rank one matrix and round-off errors interfere with the calculation of the smaller Liapunov exponents. This problem has been addressed by reorthogonalization of the solutions of the variational equation. The time interval [0, T] is subdivided into k segments of length 6j, and ,T,(t) is written as a product ,~k""" ,F,l of the fundamental solutions for each of these segments. A series of QR factorizations is then calculated so that 3 j . . . ,El = Qj Rj. At step j of this iteration, the QR factorization of the matrix 3j+l Qj is needed. The matrices Rj a r e products of right triangular matrices of moderate size, so their singular values are expected to be more reliable estimates of ~ri than those obtained from a singular value decomposition of the matrix obtained for ,~ (t) by numerical integration. The continuous methods of Dieci et al. [46] provide an alternate approach to this decomposition. There are several distinct definitions of the dimension of an attractor. The two that have been used the most in analysis of numerical and observational data are the pointwise dimension and the correlation dimension [58,59]. Both of these concepts implicitly rely upon an invariant measure of the attractor. The starting part for their computation is a time series of a trajectory x(t) sampled at N discrete times ti. Appealing to the ergodic theorem, one assumes that the discrete measure ~1 y~Uol (~(x(ti)) approximates an invariant measure # of the attractor. For any measurable set U, the proportion of the points x(ti) that lie in U is then approximately # ( U ) . The calculation of the pointwise dimension of/Z and of the correlation dimension of the attractor use interpoint distances di,j = d(x(ti),x(tj)) with respect to a metric d on the phase space. The pointwise dimension gives the rate at which the volumes of balls shrink as their radius tends to zero. Denoting Bx (r) the ball of radius r centered at x, the point-wise dimension of the measure/Z is lim(log(#(Bx(r)/log(r)) as r -+ 0 for/z-almost all x in the attractor [ 156]. To estimate the pointwise dimension, x is chosen to be one of the points x(ti) in the time series and the sequence di.j, j ~ i, is sorted to produce an increasing sequence r,. A proportion s / ( N - 1) of the points x(t~) lie in the (closed) ball Bx (rs), so/z (Bx (rs)) is estimated to be s / (N - 1). Extrapolating the slope of log(s) vs log(rL,) as r, --+ 0 yields an estimate of the pointwise dimension. There are statistical fluctuations in this estimate that depend on N and the choice of x = xi [74]. Noise in data affects these calculations, so judgment must be exercised about the range of scales above which deterministic dynamics dominates the location of the observed points and below which noise dominates. If the points on a trajectory are regarded as a random sample of points drawn from the measure/z, variance due to sampling can be reduced by averaging the results for several choices of initial points xi. Estimating the volume of small balls with feasible amounts of data is problematic for attractors of large dimension c~, since the volume decreases like r ~. The correlation dimension is computed with a similar calcu-
374
J. Guckenheimer
lation to the pointwise dimension, but instead of sorting the sequence of N - 1 numbers j :/: i, all of the N ( N - 1)/2 interpoint distances di,j, j < i, are used. "Nonlinear" methods for the analysis of time series data have been extensively investigated since the early 1980s [ 149]. This research is an inverse problem to the numerical analysis of dynamical systems models, in that it seeks to identify models that fit data. The research began with the observation that linear time series analysis methods did not readily distinguish characteristics of data produced from low dimensional attractors from data produced by systems with large random fluctuations or from systems with high dimensional attractors. The Ruelle-Takens theory of transition to turbulence [ 130] motivated this research, prompting careful scrutiny of time series data from fluid systems as flows evolved from steady states to turbulent flow [22,76]. A rich set of methods has been developed using many of the ideas described above, as well as others such as multi-fractal analysis [6] There have been attempts to reconstruct dynamical models directly from data [ 1]. The mathematical foundations for most of this work is poor compared to the remainder of the material reviewed in this survey. Nonetheless, from a practical standpoint, this area of research has great potential to enhance industrial design and scientific study of systems that can be adequately represented by dynamical systems with low dimensional attractors. The methods are less appropriate for systems that have high dimensional attractors because the amount of data required to reconstruct attractors grows very rapidly with the dimension of the attractors.
di,j,
4. Bifurcations
Bifurcation theory is the study of how phase portraits of families of dynamical systems change qualitatively as parameters of the family vary. It is a subject filled with complex detail. Singularity theory [67] is an analog to bifurcation theory, providing a framework that has been partially transplanted to the setting of dynamical systems. These efforts have produced a wealth of valuable information, but some of the mathematical completeness and elegance of singularity theory does not carry over to bifurcation theory. The intricacy of dynamical phenomena act as a barrier to the formulation of a theory that classifies all bifurcations that occur in generic families of dynamical systems. Nonetheless, the mathematical concepts adapted from differential topology and singularity theory provide the foundations for successful algorithms. The focus here is upon describing those concepts that are used in numerical methods. Less attention is devoted to results concerning structural stability or genericity.
4.1. Bifurcation theory Let f :R n x R k ---> ]R'1 be a k-parameter family of vector fields on R '1. Equilibrium points (x, ~,) of f are the solutions of f ( x , ~,) = 0. The goal of local bifurcation theory is to analyze the set of equilibrium points and their stability, taking into account the dependence upon the parameters [68]. We discuss the location of equilibrium points first and then consider their stability. Near equilibrium points (x, ~) where Dx f is regular or, equivalently,
Numerical analysis of dynamical systems
375
has full rank n, the Implicit Function Theorem states that the solutions of the equilibrium equations form a k-dimensional submanifold of R 'Z x R k that can be parametrized as the graph of a function Xe:R k --+ IR" from the parameter space to the phase space. Continuation methods implement the computation of xe. By changing coordinate systems to mix parameters and phase space variables, equilibrium point manifolds that are not graphs from phase space to parameter space can be computed. Local bifurcations include all points where Dx f is singular. To use equation solvers that rely upon the regularity of the system being solved, we require reformulation of the problem at bifurcation points. A fundamental example, saddle-node bifurcation, introduces the methods used to do so. Saddle-node bifurcation occurs at equilibrium points (x,)~) where Dx f has a simple eigenvalue zero. Thus (n + 1) defining equations in R n x IRk for saddle-node bifurcations are given by zeros of the map
F(x, )~) =
f(x,)~)
det(Dxf)(x,)~)
)
"
If the system of equations F = 0 is regular, then Newton's method can be used to locate the points of saddle-node bifurcation. Consider the case in which there is a single parameter: k = 1. Assume that (x0,)~0) is an equilibrium point at which the defining equations are satisfied. The derivative of DF is then a square (n + 1) x (n + 1) matrix with block structure
DF =
Dx f
Dx det(Dx f )
D)~ det(Dx f )
and Dx f singular. In order for this matrix to have full rank, Dx f must have rank at least n - 1 since the addition of a single row or column to a matrix increases its rank by at most 1. Here, DF can be obtained from Dx f by the successive addition of one column and one row, so the difference between the ranks of DF and Dx f is at most 2. If Dx f has rank (n - 1), then it has unique left and right eigenvectors w T, v ~ R 'Z up to scalar multiples. The regularity of DF implies that the products (w v O)DF and DF(o ) are nonzero, yielding that w D)~f :/: 0 and Dx(det(Dr f ) ) v 7/=O. The second of these equations is satisfied if wDxx f (V, v) :/: O. The inequalities w D ~ f :/: 0 and w D x x f (v, v) :/: 0 are nondegeneracy conditions for saddle-node bifurcation. Together with the assumption that Dx f has rank (n - 1), they give sufficient conditions that the defining equations F -- 0 for the saddle-node bifurcation are regular. Regularity of the defining equations for saddle-node bifurcation are not quite enough to characterize the dynamics of a family in the neighborhood of the bifurcation point. However, if the nondegeneracy conditions are strengthened to the requirement that the only eigenvalue on the imaginary axis at the bifurcation point is a simple zero eigenvalue, then the local dynamics near the bifurcation are determined up to topological equivalence and perturbations of the family will have topologically equivalent phase portraits in the neighborhood of the bifurcation. The following theorem summarizes this discussion.
J. Guckenheimer
376
THEOREM 2. Let Yc = f (x, )~) be a smooth n-dimensional vector field depending upon a scalar parameter )~. Let (xo, )~o) be a solution of the system of equations
f (x,)~) = 0 , det(Dx f ) ( x , )~) = O.
This system of equations is regular at (x0,)~0) if (1) Dx f has rank n - 1. Denote the left and right zero eigenvectors of zero by v and w. (2) w Dxx f (v, v) =/:O. (3) w D z f =fi O. If properties (1)-(3)are satisfied, the curve y of equilibrium points f (x, )~) = 0 is smooth. Furthermore, if zero is a simple eigenvalue of Dx f and Dx f has no pure imaginary eigenvalues, then there is a neighborhood U of (xo, )~o) such that all trajectories that remain in U for all time are equilibrium points o n / . Singularity theory [7,67] provides a set of tools for analyzing the variation of equilibrium points with respect to parameters in generic families of vector fields. Before tackling the general theory, consider one more example, the family of scalar vector fields )c - - )~1 -+- ~.2X -~- X 3 9 For fixed ~-2 and varying ~.l, this family fails to satisfy the condition wDxx f ( v , v) ~ 0 when ~.2 = 0. However, as a two parameter family, the system of equations
f(x,~) =0, Dx f (x, ~.) = 0 , Dxx f (x, )~) = 0 is regular. The curve on which saddle-node bifurcation occurs in this family is obtained by eliminating x from the pair of equations ~.1 -q- ~.2X -Jr- X 3 - - 0
and
Df(x)
- - ~2 -+-
3x 2 - - 0 .
Parametrically, the curve is given by )~2 - - 3 x 2 and )~l - 2x3. This implies that ()~1/2) 2 -k(~,2/3) 3 - 0. Solutions of this equation form a cusp in the ()~1,)~2) parameter plane. It is not smooth at the origin. The example illustrates that the locus of local bifurcation in a generic multi-parameter family may not be a smooth manifold. Nonetheless, singularity theory gives a set of geometric tools that can be used to formulate regular systems of defining equations for local bifurcations. The theory is typically applied at the level of germs [67], but the description here avoids this language. Jets are objects that give coordinate-free expressions for the Taylor series of smooth maps between manifolds. The r-jet extension of a map f associates to each point of the domain of f the Taylor expansion of degree r, viewed as an object in a suitable jet space. Thom's transversality theorem [92] states that if P is a submanifold of a jet space, then any smooth map can be perturbed so that its jet extension is transverse to P. In the example of the cusp, the two-jet extension of the family of maps g(x, )~l, )~2) - )~l + ~.2x + x 3 is
Numerical analysis of dynamical systems
377
given by j2g(x, AI, A2) -- (g, g', g") = (s + A2X -q- X 3, A2 Jr- 3X 2, 6X) which vanishes at the origin. The Jacobian of J 2g at the origin is the non-singular matrix
(il 0) 0 0
1 0
.
Therefore, the cusp gives a family of maps whose two jet extension is transverse to the zero dimensional manifold consisting of the origin. Local bifurcations determined by smooth submanifolds of the jet spaces have regular systems of defining equations in those jet spaces. The transversality theorem implies that solutions of these defining equations yield smooth submanifolds of the product of parameter and phase spaces in generic families of vector fields. The Thom-Boardman stratification in singularity theory illustrates concretely how these procedures work. The T h o m - B o a r d m a n decomposition of a map g" R m ~ R'; is constructed as follows. Partition R m into the sets 27 / on which Dg has rank min(m, n) - i or corank i. For generic maps g, the sets 27i are submanifolds. The defining equations for 27i c a n be expressed (locally) in the space of 1-jets in terms of minors of Dg. Partition each of the 27i by restricting g to 27i and repeating the construction. This produces sets 2 7 i , j on which gl s; has rank j. For non-increasing sequences of integers (il, i2 . . . . . ik), Thorn defined 2 7 i l , i 2 ..... ik inductively as the set on which the derivative of g restricted to r i l ' i 2 ..... ik-I has corank i~. Boardman proved that, for generic maps g, these sets are submanifolds of R m . The saddlenodes and cusps described above correspond to the singularities 271 and 27 l, 1. Interest in the T h o m - B o a r d m a n stratification was motivated by its relationship to the stability of mappings. The groups of diffeomorphisms of R'" and R" act on C ~ (Rm, R';) by composition on the left and right: (h, k) 6 Diff ~ (R m) • Diff ~ (R") send g to hgk. If g is an interior point of its orbit with respect to this action, then it is stable. The action clearly preserves the T h o m - B o a r d m a n stratification, so transversality with respect to this stratification is necessary for stability. In a seminal series of papers [ 116-121], Mather formulated necessary and sufficient conditions for stability of a mapping. In some cases, transversality with respect to the T h o m - B o a r d m a n stratification is sufficient, but in other cases it is not. Local bifurcation theory seeks stratifications of the jet spaces of families of dynamical systems that are analogous to the T h o m - B o a r d m a n stratification. These stratifications are expected to give necessary conditions for the structural stability of a family, but they will give sufficient conditions in only a limited number of cases. The definition of a stratification used here is naive: a stratification of a closed set V is a sequence of closed subsets V - V1 D Vt-l D ... D V0 D V-i -- 0 such that each difference S i - - V i - Vi-1 is a smooth manifold of dimension i, called a stratum, or empty. The codimension of the stratum Si is k - i. Locally, there are regular systems of k - i defining equations that define Si as a subset of R k. These are defining equations for the bifurcations in Si. Ideally, Si has a finite number of components, each consisting of vector fields with similar properties near their bifurcation points. A k - i parameter family that is transverse to Si is an unfolding. A particular choice of a point in Si and an unfolding is a normal form. In the "best" circumstances, the normal forms are structurally stable k - i parameter families. Even when this is true, it can be difficult to prove and each case requires a separate analysis.
378
J. G u c k e n h e i m e r
The analyses of local bifurcations have tended to follow a common pattern. The first step is to identify submanifolds of the space of vector fields that fit into a stratification. These submanifolds should be preserved by topological equivalence or other equivalence relations that are used to describe when vector fields are qualitatively similar to one another. Once the submanifolds are identified, the next step is to choose normal forms for each submanifold. The choice of normal form is usually based upon polynomial coordinate transformations that simplify the analytic expression of the vector field near the bifurcation. The third task in the analysis of local bifurcations is to study the dynamics of the normal form families, seeking to establish their structural stability. The unfoldings of a bifurcation of codimension j will contain in their parameter spaces submanifolds of bifurcations of codimension smaller than j. Many of these lower codimension bifurcations are global bifurcations, making it awkward to maintain a separation between the theories of local and global bifurcation. The primary distinction from a computational perspective is that the defining equations for local bifurcations are formulated directly in terms of the Taylor series of the vector field rather than in terms of the flow of the vector field. Part of the bifurcation analysis is to identify geometric properties of how strata of smaller codimension limit on the codimension j bifurcation. When the normal forms do not produce structurally stable families, there are two possible scenarios. The first possibility is that a more refined analysis with normal forms of higher degree and additional nondegeneracy conditions on the normal form leads to a structurally stable family. The second possibility is that normal families defined by finite Taylor expansions never produce structurally stable families. As in some cases of double Hopf bifurcation, there may be an infinite number of families of bifurcations that intersect the neighborhood of a bifurcation of codimension j and no simple decomposition of the bifurcation set as a stratified set is possible. Takens-Bogdanov bifurcation [19,144] provides a good illustration of the analysis of a local bifurcation of codimension two. This bifurcation occurs at equilibrium points of a vector field for which zero is an eigenvalue of (algebraic) multiplicity two and no eigenvalues are pure imaginary. The defining equations can be expressed easily in terms of the characteristic polynomial of the Jacobian at an equilibrium. Near a point of Takens-Bogdanov bifurcation, the Taylor expansion of degree two for an unfolding can be transformed to .~ ~ y , - - ~1 +
ax 2 -+- Y()~2 -+- bx)
in the plane corresponding to the generalized eigenspace of zero. This is a normal form for Takens-Bogdanov bifurcation. The normal form is a structurally stable family and the phase portraits near the bifurcation are determined if neither a or b is zero. In the two dimensional parameter plane there are three bifurcation curves that meet at the TakensBogdanov point: a curve of saddle-node bifurcations that passes through the TB point, a curve of Hopf bifurcations that terminates at the TB point and a curve of homoclinic bifurcations that terminates at the TB point. These three curves meet with a quadratic tangency, and in the region of parameters between the Hopf and homoclinic bifurcation curves, the vector field has a periodic orbit. This picture illustrates that global bifurcations can appear in the neighborhood of local bifurcations.
Numerical analysis of dynamical systems
379
The classification of local bifurcations up to topological equivalence of their unfoldings is hardly complete, even for relatively low codimension. There are examples beginning with codimension two bifurcations of three dimensional vector fields in which chaotic dynamics appear in the unfoldings. These examples have an infinite number of bifurcation curves that terminate at the codimension two point in the parameter space, and the families are never structurally stable. Kuznetsov [ 106] gives a comprehensive summary of information about codimension one and two local bifurcations. Dumortier, Roussarie and Sotomayor [55,56] have analyzed codimension three local bifurcations of planar vector fields. Their work is the current frontier in attempts to systematically classify local bifurcations of increasing codimension. Similar principles to the ones discussed above apply to global bifurcations, but the defining equations are expressed in terms of the flow maps instead of directly in terms of the vector field. Chapter 4 of this volume contains more specific information about global codimension one and two bifurcations, including discussion of bifurcations of homoclinic and heteroclinic orbits and the numerical methods implemented in the HomCont package [27] that is part of the 1997 version of AUTO [50]. If flow maps and their derivatives can be computed accurately with numerical integration, then similar numerical methods can be used to compute bifurcations of periodic orbits. There are aspects of global bifurcations that have no counterparts in the theory of local bifurcation. One example is the breakdown of invariant tori. In generic two parameters of vector fields, invariant two dimensional tori with fixed irrational winding number may be present along curves in the parameter space. These parameter space curves corresponding to invariant tori with an irrational winding number may have endpoints beyond which the invariant torus "breaks down" into a Cantor set or a chaotic invariant set. The singularity theory based methods described above are inadequate to analyze the break down process. Renormalization methods that search for self-similar patterns in these phenomena have been used [60].
4.2. Continuation methods Continuation methods solve underdetermined systems of equations F = c,
F : R m -+ R '~,
with m > n. They usually assume F is smooth and and regular; i.e., DF has rank n on the level set of c. In these circumstances, the Implicit Function Theorem implies that the level set is a smooth manifold of dimension m - n whose tangent spaces are given by the null spaces of DF. Sard's Theorem [92] implies that for almost all c (with respect to Lebesgue measure in ~"), the level set is a manifold. Continuation algorithms are best developed when m = n + 1 and the solution manifolds are curves. Multiparameter continuation with m > n + 1 is not yet in widespread use, but remains an active research area [5,23]. The topological complexity of higher dimensional level sets has not been fully incorporated into robust algorithms. Single parameter continuation can be formulated as a combination of numerical integration and root finding. The goal is to compute the level curve F --c. On the set of regular
380
J. Guckenheimer
points of F, one can define the line field that assigns to x the null space of DF(x). This line field can be represented by vector fields in a variety of ways: for example, as a unit vector field determined by an orientation of the null space or via a parametrization of the level curve in the form y ( x ) where (x, y) are coordinates on IR''+l with D y F a regular n • n minor of DF and Dxy -- - ( D y F ) - l Dx F. The integral curves of this vector field are level curves of F. Continuation methods exploit this fact to choose predicted steps along a level curve, but they then utilize root finding methods to refine these steps so that they once again satisfy F = c. Without this cycle of prediction and correction, numerically integrated curves will likely drift away from the level curve on which they start. The use of the initial prediction step (typically an Euler step that gives a tangent approximation to the level curve) helps pick seeds for iterative root finders that are close to the desired solutions. This is important when using a root finder like Newton's method that is not globally convergent. As with numerical integration, the choice of step length in a continuation method is important. Large step lengths tend to make the root finding less reliable or slower. Small step lengths take more steps to traverse a level set. Choosing unit vectors to parametrize the level curves leads to pseudo-arclength continuation. Fixed step sizes yield points along the curve that are approximately equidistant. If the level curve has tight folds with areas of large curvature, then pseudo-arclength continuation is likely to require very small steps. Therefore, adaptive strategies typically monitor the curvature of the level curve and adjust the step length to control the estimated error from each prediction step. The final choice that needs to be made in implementing a continuation method is the choice of subspace in which to perform the root finding. To obtain a "square" system, the original system of equations is constrained to a hypersurface on which F is regular. Common choices are to fix one coordinate; i.e., use a subspace parallel to a coordinate subspace, or to use the hypersurface that is orthogonal to the continuation step. Continuation methods have been extremely useful in the study of dynamical systems. Here, we examine their use in computing information about local bifurcations. Consider the system of differential equations .;c = f (x, ~.)
with x 9 R n and )~ 9 IRk. Local bifurcations locate parameter values ~, at which equilibria of this dynamical system have qualitative changes. The Transversality Theorem [92] implies that the equilibrium set of f is a smooth manifold for generic f . In this case, continuation methods can be used to compute the equilibrium manifold. As we compute the set of equilibria f = 0 with continuation, we expect to occasionally see bifurcations along the branch. These occur when Dx f is singular or has eigenvalues along the imaginary axis. Thus the problem of computing local bifurcations consists of a continuation problem together with solving additional equations that explicitly depend upon the derivatives of f . Bifurcations of high codimension serve as "organizing centers" where multiple types of lower codimension bifurcations meet. The branching patterns of many bifurcations of codimension 2, 3 and 4 have been analyzed by first computing their normal forms and then studying the dynamics exhibited by the normal form families. Single parameter continuation has been used to locate and identify high codimension bifurcations with the following strategy, implemented in CONTENT [107]. In computing branches of equilibria for a
Numerical analysis of dynamical systems
381
generic dynamical system with one active parameter, one expects to meet saddle-node and Hopf bifurcations. These are detected by evaluating a function that changes sign at the bifurcation. When a bifurcation point is located, a new continuation can be started to follow the bifurcation curves. The defining equation is added to the equilibrium equations and a second parameter is made active, producing n + 1 equations in n + 2 variables. At selected points along these bifurcation curves, codimension two bifurcations may be encountered and detected by evaluation of suitable functions. When this happens, a new continuation is established with a pair of defining equations for the codimension two bifurcation and three active parameters. This process can bootstrap from codimension j to codimension j + 1 bifurcations as long as explicit defining equations for the bifurcations have been formulated and the root finding converges. The package CONTENT implements computations of all local codimension two bifurcations of vector fields and discrete maps (and much more as well). There are important cases in which we want to study systems whose equilibrium sets are not manifolds. For example, systems that are equivariant with respect to a symmetry group are common in varied applications. Equivariance can force the zero level set of a vector field or family of vector fields to have singularities. This complicates the computation of bifurcations substantially. The analysis of these systems is framed in terms of group theoretic concepts. Dynamical analysis of the normal forms of even moderately complex normal forms of symmetric systems is incomplete [61 ]. Computation of the equilibria and local bifurcations in these systems can require substantial amounts of algebra [ 153]. Gatermann [65] and Sanders [133] have made initial steps towards the construction of general software for the computation and analysis of normal forms of symmetric systems. Continuation methods have been used to track curves of periodic orbits as well as equilibria. AUTO [49] implements continuation methods superimposed on collocation algorithms for periodic orbits. The basic advantages of using a continuation method to compute periodic orbits is that initial conditions close to the desired orbit are used for each point along the continuation path after the first. Thus, convergence of the method to the desired orbit is much more likely than with random or fixed data to start each periodic orbit calculation, and fewer calculations are required at each step along the continuation path. There are circumstances in which the use of a global boundary value solver like that employed in AUTO offers additional advantages when coupled with continuation. First, unstable periodic orbits can be computed. As an iterative method, the algorithm has stable fixed points corresponding to all approximate periodic orbits, not only those that are attracting in the flow. With suitable procedures for choosing dependent and independent parameters in the root finding, curves can be followed around folds in which the periodic orbits do not vary smoothly with the parameters. Second, in problems with multiple time scales, one finds families of stable periodic orbits that cannot be computed readily with numerical integration. The canard example in Section 3.1 shows periodic orbits that can be computed with boundary value solvers but not with numerical integration. 4.3. Numerical methods for computing bifurcations Bifurcation theory provides a mathematical foundation for algorithms that locate bifurcations in specific families. Implementation of methods based upon singularity theory en-
382
J. Guckenheimer
counters three types of numerical issues: (1) Formulation of regular systems of defining equations. (2) Accurate evaluation of defining equations that depend upon derivatives of a vector field. (3) Numerical condition number of the defining equations, especially for large systems and systems with multiple time scales. These issues can be viewed from both theoretical and practical perspectives. Practically, the most desirable numerical methods are those that give accurate answers for large classes of interesting systems. There are several important choices that enter the construction of software for computing bifurcations, so the potential number of distinct methods is large. Yet, different methods are seldom compared carefully with one another. There have been few attempts to gather suites of test problems in this domain as there has been for numerical integration [95]. Picking parameters in bifurcation algorithms that make methods work well remains an art. Thus, opinions of different methods tend to be very subjective, based upon the experience of users and the skill they develop in adjusting algorithmic parameters when a method initially fails. Regular systems of defining equations for saddle-node bifurcations are presented above in terms of the determinant of the Jacobian of a vector field. This choice of defining function is natural from a theoretical perspective, but may lead to numerical problems. If the Jacobian has eigenvalues of large magnitude, then these eigenvalues contribute to the condition number of the determinant and may make it difficult to satisfy the defining equations to a desired tolerance. The larger the system, the worse this problem becomes. Thus there are circumstances in which it is desirable to seek alternate defining equations for saddlenode bifurcation that avoid calculation of the determinant. The singular matrices do not form a smooth submanifold of the space IR'1x,l of n x n matrices, so there is no regular function whose values measure the distance of a matrix from being singular. However, the corank one matrices are a smooth hypersurface in It~n xn. Saddle-node bifurcations occur at matrices of corank one, and this fact can be used in the formulation of defining equations. The following result about bordered matrices is the basis for one method. THEOREM 3 [70]. Let A be an n x n matrix that has a single eigenvalue zero. For most choices o f n vectors B and C and scalar D the (n + 1) x (n + 1) block matrix
M--
Ct
D
is nonsingular. There are constants cl > 0 and C2 and a neighborhood U o f A so that if A ~ U with smallest singular value or, then the unique solution (u t, v) o f the system o f equations m
.4
satisfies c l o
O, V(x) > V(~p(t,x)). PROOF. Observe that if A or R equals the empty set, then the result is trivially true. So assume that A :/: 0 # R. The proof is now broken down into three steps. The first is to define a function f :S --+ [0, 1] by
f(x) =
#(x,A) #(x,A)+#(x,R)
Clearly, (since A A R = 0) f is continuous, f - l (0) = A, and f - l ( 1 ) -- R. Second, define g : S --+ [0, 1] by
g(x)-
t/>0
x))}.
Again, it is obvious that g-1 (0) = A, and g - I (1) = R and g(~o(t,x)) 0, i.e., g(qg(~, x)) = ~ a constant for all ~ ~> 0. This implies that co(x) n (A U R) -- 0, a contradiction. Thus V(x) - V({p(t, x)) > 0, and condition (iii) is satisfied. D
2.2. Morse decompositions EXAMPLE 2.8. Consider the following modification of Example 2.3. m
y,
= cy +
(x 2 -
1)(X -Jr 1/2),
C > 0.
(2)
As before, N = [ - x , x] • [ - x , K] C ]R 2 is an isolating neighborhood for large x. This system still possesses a Lyapunov function H ( x , y) "= y 2 / 2 - ( x 4 / 4 + x 3 / 6 - x Z / 2 - x / 2 ) . However, in this case there are three equilibria ( - 1 , 0 ) , ( - 1 / 2 , 0), (1, 0) and it would be nice to decompose the isolated invariant set Sc into three isolated subsets. This requires a generalization of the concept of an attractor repeller pair. In an attractor repeller pair (A, R) decomposition of S there is a natural total ordering that can be imposed on these two isolated invariant subsets given by R > A, implying that there is no connecting orbit from A to R. If one has a multitude of isolated invariant subsets, then it is more natural to use partial orders. A partial order I on a set 79 is a relation > which satisfies: (i) p > p never holds for p 6 79. (ii) I f p > q a n d q > r t h e n p > r . If, in addition, the partial order satisfies (iii) for all p, q E 79, either p > q or q > p. Then > is called a total order. From now on (79, >) will be used to denote afinite indexing set 79 with a partial order >. DEFINITION 2.9. A finite collection
,A4(S) - { M ( p ) I p ~ 79} 1 Actually w e are defining a use the above definition.
strict partial order, however, to save the use of an unnecessary adjective we shall
Conley index
403
of disjoint compact invariant subsets of S is a Morse decomposition if there exists a partial order > on the indexing set 7J such that for every
x6S\
UM(p) pc T~
there exists p, q E 7) such that p > q and
co(x) C M(q)
and
oe(x) C M(p).
The sets M(p) are called Morse sets. Observe that it is not assumed that there is unique order on 7~. In fact, any ordering on 7) with the above property is called admissible. Having chosen an admissible order > we shall often write
M(S)-
{M(p) I p ~ (79 , >)}.
Strictly speaking this is an abuse of notation since the Morse decomposition only refers to the collection of Morse sets. In applications, however, the construction of a Morse decomposition typically involves knowledge of a Lyapunov function, which can be used to define an admissible order. EXAMPLE 2.10. Returning to Example 2.8, let M(3) := ( - 1 / 2 , 0), M(2) = ( - 1 , 0) and M (1) := (1, 0). Then, for c > 0 we have the Morse decomposition
A d ( S c ) - {M(i) l i -
1 , 2 , 3 , 3 > 2 > 1},
where the ordering is determined by the Lyapunov function H. Observe that > is an admissible ordering for all c > 0. This is not, however, the only partial ordering that is admissible. Consider equation (2) at the two extreme parameter values c = 0 and c -- oo. At c -- 0 we have a Hamiltonian system where the set of bounded solutions has two components: one consisting of the point (1, 0); and the other containing ( - 1,0), ( - 1/2, 0), a variety of periodic orbits, and an orbit homoclinic to ( - 1, 0). From this one can conclude that for 0 < c 0 2 with 1 unrelated to either 2 or 3. A simple rescaling of time allows one to write down ~ = - ( x 2 - 1)(x + 1/2) as the limiting equation as c --+ oc. For this equation it is easy to check that the set of connecting orbits consist of heteroclinic orbits from ( - 1/2, 0) to ( + 1, 0). Thus, for c sufficiently large one can use the ordering 3 > oc 2 and 3 > oc 1. In both these examples the order obtained by an explicit study of the flow at a given parameter value is different from that obtained using the Lyapunov function. In particular, > contains more relations that either >0 and > oc, and therefore, less information about the structure of the dynamics. This example leads to the observation that while there may be many admissible flows for a given Morse decomposition, there is, a unique minimal (in the sense of the number
K. Mischaikow and M. Mrozek
404
of order relations) admissible order which is called the flow defined order. Recall that an order > ' on 7~ is an extension of > if p > q implies p > ' q. Thus, any admissible order must be an extension of the flow defined order. In applications one typically does not know the flow defined order, and therefore, must work with an extension. As in the case of attractor repeller pair decompositions, Morse decompositions are strongly related to the existence of Lyapunov functions. The following result is a direct generalization of Theorem 2.7. THEOREM 2.1 1. Let S be an isolated invariant set. Let
M ( S ) = {M(p) I p ~ 7~} be a finite collection of disjoint invariant compact subsets of S. Then, ,All(S) is a Morse decomposition of S if and only if there exists a continuous function V" S --+ [0, 1] such that: V x, y ~ M(p)
implies
V ( x ) - - V(y)
x ~ S \ U M(p)
implies
V(x) > V(~p(t,x))
Vt>O.
pEP
Observe that given a Morse decomposition WI(S) = {M(p) ] p 6 (7J, >)} one can always coarsen it. To do this systematically we introduce the following notation. A subset I C 7~ is called an interval if p, q 6 I and p > r > q implies that r 6 I. The set of intervals on (7~, >) will be denoted by 2-(7J, >). PROPOSITION 2.12. Let I ~ 2"(7~, >) and define
u
(u
pEI
p,qEl
Then, M ( I ) is an isolated invariant set. The proof is fairly straight forward and follows from the compactness of S. PROPOSITION 2.13. All(S) - {M(p) [ p E "P\l} U {M(I)} defines a Morse decomposi-
tion of S. Furthermore, an admissible partial order >' is given by p>tq p>t I I>~p
~,
p>qif if if
p, q ~ 7 ~ \ l ,
3 q E I such that p > q, 3 q 6 I such thatq > p.
This section began with the statement that Morse decompositions are generalizations of attractor-repeller pair decompositions. To see this observe that an attractor-repeller pair decomposition (A, R) of S defines a Morse decomposition
M(S)-
{M(p)]p-
1,2, 2 > 1}
Conley index
405
where M (1) = A and M (2) = R. In the converse direction, within a Morse decomposition there are many attractor repeller pairs. To make this precise define an adjacent pair of intervals in (79, >) to be an ordered pair (I, J ) of mutually disjoint intervals satisfying: (i) I U J E 2-(79, >), (ii) p E I, q E J implies that p ~ q. The collection of adjacent pairs is denoted by 2-2(79, >). If (I, J ) is an adjacent pair, then setlJ ::lUJ. LEMMA 2.14. If (I, J ) E I2('P, >), then ( M ( 1 ) , M ( J ) ) is an attractor-repeller pair in M(IJ). EXAMPLE 2.15. Returning to Example 2.10, consider c ~ cx~. The flow defined order is 3 > ~ 2 and 3 > ~ 1. Thus (2, 3), (3, 1) E 2-2(79, > ~ ) . Therefore, (M(2), M(3)) and (M(1), M(3)) form attractor-repeller pair decompositions of M(23) and M(13), respectively. Knowing that Morse decompositions can be coarsened it is natural to ask whether given an isolated invariant set S, there exists a finest Morse decomposition. The following example shows that the answer is no. EXAMPLE 2.16. Consider the equation .~ -- X2 sin
zr X
Let N = [ - 2 , 2]. Then, Inv N -- S = [ - 1 , 1] is a compact isolated invariant set. We can define Morse decompositions as follows. Let
.A4,,(S) "= { + l / k l k - - 1 . . . . ,n - 1} U { [ - I / n , l / n ] } . For each n this is a Morse decomposition with 2n - 1 Morse sets and as n increases the Morse decomposition becomes more refined. Since, by definition, a Morse decomposition can only consist of a finite number of Morse sets there is no finest Morse decomposition.
2.3. Conley's decomposition theorem As was indicated by Example 2.16 there need not be a finest Morse decomposition. However, one can still ask the following question. Given a compact invariant set S is there a finest collection of subsets of S off of which one can define a Lyapunov function? One of the fundamental theorems of dynamical systems states that the answer is yes. To present it the notion of chain recurrence is essential. An (e, r) chain from x to y is a finite sequence
{(xi,ti)} C X X ['t', CX3),
i -- 1 . . . . . n,
406
K. Mischaikow and M. Mrozek
such that x = xl, ti >/"c, #(qg(ti,xi),Xi+l) 0 such that r x) ~ N, then there exists to 6 [0, tl] for which r to], x) C N and r x) 6 L. The following theorem gives the existence of index pairs. THEOREM 3.5. Given an isolated invariant set S, there exists an index pair. Isolating neighborhoods and index pairs are very general objects; and as such useful for computational purposes since they are relatively easy to find. A much stricter notion is that of an isolating block. This is a compact set B such that
B-:=
B I
is closed and for all T > 0 InvT(B, ~o) C int B,
T),
r B, VT > 0},
Conley index
409
where InvT(B, ~o):= {x 6 B I ~o([-T, T], x) C B }. THEOREM 3.6. Given an isolated invariant set S and a smooth flow, there exists an isolating block B such that S -- Inv B. Furthermore, (B, B - ) is an index pair for S. DEFINITION 3.7. The homotopy Conley index of S is
h(S) = h(S, ~o) ~ ( N / L , [L]). Observe that the Conley index of S has been defined in terms of any index pair. Furthermore, typically an isolated invariant set possesses a multitude of isolating neighborhoods. Therefore one needs the following theorem. THEOREM 3.8 (The Conley index is well defined). Let (N, L) and (N', L') be indexpairs for an isolated invariant set S. Then
( N / L , [L]) ~ (N'/L', [L']). Observe from the definition that the homotopy Conley index is the homotopy type of a topological space. Unfortunately, working with homotopy classes of spaces is extremely difficult. To get around this, it is useful to consider the homological Conley index defined by
CH,(S) := H , ( N / L , [L]) ~ H,(N, L). Since the homology of two homotopic spaces is the same, the homology index is well defined. REMARK 3.9. It is not true that given any index pair (N, L), H , ( N / L , [L]) ~ H , ( N , L). However, one can prove that one can always find index pairs for which this isomorphism holds. Since for some of the algebra it is more convenient to work with the pair (N, L) directly, rather than the quotient space we will hence forth assume that we are working with these types of index pairs. Finally, we state the continuation theorem for the Conley index. THEOREM 3.10 (Continuation Property). Let Sz o and Sz o be isolated invariant sets that are related by continuation. Then,
CH,(Szo) ~ CH,(Sz, ). Let us now consider some examples of the Conley index.
410
K. Mischaikow and M. Mrozek
EXAMPLE 3.1 1. Observe that the empty set 0 is vacuously an isolated invariant set. Furthermore, (0, 0) is an index pair for the empty set. Thus CH, (0) ~ O.
The contrapositive of this example, though trivial, has significant enough implications to be designated as a theorem. THEOREM 3.12 (Wa2ewski Property). Let N be an isolating neighborhood and assume that C H , (Inv N) ~ O. Then, Inv N ~ 0. This result provides the simplest example of an existence result which can be obtained via the Conley index. It also demonstrates an important point concerning the way one wishes to view the Conley index. The computation of the index was done with knowledge of the invariant set. The theorem of interest was stated in terms of the isolating neighborhood. After the empty set, the simplest isolated invariant sets are hyperbolic fixed points. THEOREM 3.13. Let S be a hyperbolic fixed point with an unstable manifold of dimension n. Then CHk ( S)
|Z I0
i f k = n, otherwise.
PROOF. Let 2 = f ( x ) , x E R n+m, be the ordinary differential equation for which S is a hyperbolic fixed point. By the Hartman-Grobman theorem, the flow in a neighborhood of S is topologically equivalent to the flow in a neighborhood of the origin of -- D f (S)y.
(3)
Thus it suffices to compute the Conley index of the origin under this linear dynamics. A linear change of variables transforms (3) to
[z 0 z, 0 lEz2] where A is an m • m matrix for which the real parts of all its eigenvalues are less that zero and B is an n x n matrix for which the real parts of all its eigenvalues are greater that zero. An isolating neighborhood of the origin is given by [ - 1 , 1]m x [ - 1 , 1],7. The exit set is given by [ - 1 , 1]m x 0 ( [ - 1 , 1]n). The result now follows from computing H. ( [ - 1 , 1] m x [ - 1 , 1]", [ - 1 , 1] m • 0 ( [ - 1 , 1In)). D EXAMPLE 3.14. Consider Example 2.3. Linearizing about the equilibria and counting the number of eigenvalues with positive real part one can check that for c > 0, k = 1, ((-z, 0)) {0z ifotherwise,
Conley index
411
and CHk ( ()~
,0))
/ Z
if k -- 2,
!0
otherwise.
EXAMPLE 3.15. The same type of argument applied to Example 2.8 gives CHk ((--I-1,0)) ~ { OZ
if k - 1, otherwise,
CHk((1/2, 0)) ~ { Z 0
if k = 2, otherwise.
and
The Thom isomorphism theorem [4,49,77] provides a general means of computing the Conley index for normally hyperbolic invariant sets. THEOREM 3.16. Assume that a manifold S is a normally hyperbolic invariant set. Let E be the vector bundle over S defined by the local unstable manifold of S. If E is a rank n orientable bundle and one uses homology with field coefficients, then CHk(S) ~ Hk+n(S).
As a corollary we obtain the following result. COROLLARY 3.17. Let S be a hyperbolic invariant set that is diffeomorphic to a circle. Assume that S has an oriented unstable manifold of dimension n + 1. Then CHk ( S)
[Z I0
i f k = n , n + l, otherwise.
EXAMPLE 3.18. Observe that from Corollary 3.17 the dynamics on the isolated invariant set S plays no role with respect to C H , ( S ) . In particular, it implies that the index of S is the same whether S is a hyperbolic periodic orbit; a circle on which there are two hyperbolic fixed points connected by two heteroclinic orbits; or even a circle consisting entirely of fixed points. One can obtain the same conclusion by a continuation argument. However, the point is that given an isolating neighborhood N with maximal invariant set S -- Inv N and CHk ( S) ~
Z
ifk-n,n
0
otherwise,
+ l,
one may not conclude that S contains a periodic orbit. This is an important issue. Because the Conley index remains invariant under continuation, in general, the index alone does not provide sufficient information to draw conclusions about the structure of the invariant set. The results described in Section 4 are devoted to
412
K. Mischaikow and M. Mrozek
this problem. What will be shown is that index information plus some knowledge about the dynamics on N can, in many cases, be used to obtain reasonably strong conclusions concerning the dynamics of S. In particular, Theorem 4.20 states that if S has the Conley index of a periodic orbit and that the isolating neighborhood possesses a Poincar6 section, then S must contain a periodic orbit. To apply Theorem 3.16 one needs to be able to determine the orientability of the unstable manifold of S. For a general nonlinear differential equation, doing this analytically is extremely difficult. For this reason, the index theory is typically computed using Z2 coefficients. In this case the Thorn isomorphism theorem implies the following result. THEOREM 3.19. Assume that a manifold S is a normally hyperbolic invariant set. Let E be the vector bundle over S defined by the local unstable manifold o f S. I f E is a rank n bundle, then CHk(S; Z2) ~'
Hk+n(S, Z2).
While these theorems provide nice abstract means of determining the Conley index, in applications the most common approach is to perform a continuation to a simple system. EXAMPLE 3.20. Returning to Example 2.3, recall that N is an isolating neighborhood for all ,k E [ - 1, 1]. At X = - 1, Sc,- 1 = 0 and therefore, CH, (Sc,z) ~, O. EXAMPLE 3.21. For Example 2.8 we wish to compute the index of Sc. Consider the one parameter family of equations
.~
m
y,
) -- cy 4- (1 - ~ . ) ( x 2 - 1)(x 4- 1/2)4- X ( x -
1),
c>0.
(4)
N is an isolating neighborhood for all ~, 6 [0, 1]. Furthermore, at ~, = 0 we have Equation (2) while at ~. = 1 we have a system for which Inv N consists of a single hyperbolic fixed point with a one dimensional unstable manifold. Therefore, CHk(Sc)
,~,[Z I0
if k - l , otherwise.
The following theorem is fundamental to many of the most significant applications of the index theory to date. THEOREM 3.22 (Summation Property). Assume S = So U S1 is an isolated invariant set where So and $1 are disjoint invariant sets. Then C H , ( S ) ~ CH,(So) EDCH,(S1).
Conley index
413
PROOF. Since So and S1 are disjoint invariant sets, there exist disjoint isolating neighborhoods No and Nl such that (No, L0) and (Nl, L1) are index pairs for So and Sl respectively. Thus, C H , ( S ) -- H , ( N o U NI, L0 U LI) -- H , ( N o , LO) | H , ( N I , L I ) -- C H , ( S o ) 9 CH,(SI).
U]
EXAMPLE 3.23. Consider yet again Example 2.3. The index computations of Examples 3.14 and 3.20 allow us to apply Theorem 3.22 to conclude that S 7~ {(iX, 0)}. Therefore, Theorem 2.4 implies that there exists a heteroclinic orbit from (-X, 0) to 0v, 0).
3.2. Maps As was indicated in the introduction the Conley index can be defined for discrete dynamical systems, i.e., for continuous maps f ' X --+ X where X is a locally compact metric space. As in the case of flows one begins with the notion of an index pair. DEFINITION 3.24. A pair (N, L) of compact subsets of X is called an index pair for an isolated invariant set S if L C N and (1) cl(NXL) is an isolating neighborhood isolating S, (2) f (L) N N C L (positive invariance), (3) f (NXL) C N (exit set). THEOREM 3.25. For any neighborhood V of an isolated invariant set S there exists an indexpair (N, L) for S such that NXL C V. So far the Conley index theory in the discrete case mimics the flow case. To construct the index we need to take two index pairs (N, L) and (N', L') for the same isolated invariant set S and show that they carry some common information. In the flow case the most general common information is the homotopy type of the quotient space [N/L] and the required homotopies are built along the trajectories of the flow. The difficulty in generalizing the Conley index to maps lies in the lack of such homotopies. Actually things are even worse: the homotopies needed in the construction of the Conley index for flows may not exists at all in the discrete case. Consider the following two examples. EXAMPLE 3.26. Let f : R --+ R be given by f ( x ) := x + 1. For every n E N put L,, := [n, n + 1/2] and N,, := U{Li I i = 0, l, 2 . . . . . n}. One can easily verify that for every n c N the pair (N,, L,) is an index pair for f such that N,, \L,, isolates the empty set. On the other hand [N,,/L,,, [L,, ]] is the homotopy type of a pointed set of n elements. EXAMPLE 3.27 (Smale's Horseshoe). Let N := [0, 1] • [0, 1] C R 2. Assume f : R 2 --+ R 2 is a continuous map such that f maps two rectangles R0 and R l linearly onto rectangles So and Sl, as indicated in Figure 1. Assume also that f maps NX(Ro U Rl) into ]R2XN and 1~2\N into It~2\(80 U S1).
K. Mischaikow and M. Mrozek
414
D
C
R1
>
so
s~
R0
A
B A'
B'
C'
D'
Fig. 1. The U horseshoe.
Put
C n ' - - { o t l / 5 + ' " + O t n / 5 n + o t / 5 n+l Ioti e {1,3}, i - - 1 , 2 . . . . . n, a 6 [0, 1]}, Ln := [0, 1] • cl([O, I]\C,,). Then S "-- Inv N C ["]{Cn • Cn In -- 1, 2 . . . . }. One can easily verify that (N, Ln) is an index pair for S for all n e N and [N/Ln, [Ln ]] is the homotopy type of the wedge sum of 2 n copies of a pointed circle. The examples show that unlike the flow case, the homotopy type of the quotient space [N/L] of an index pair (N, L) is not an invariant of S. This can raise the question if the Conley index in the discrete case makes sense at all. Surprisingly it does, and the theory incorporates the index for flows as a special case. To see how this can happen we need to introduce the index map. Given an index pair (N, L), the index map is the map fN,L : N / L ~ N / L defined by
fN,L([x]) " - - { f L ( ] )
if f ( x ) e N , otherwise.
(5)
The following proposition follows easily from the definition of the index pair. PROPOSITION 3.28. For any index pair (N, L) the index map f N,L is continuous. Index maps turn out to be essential in extracting common information from index pairs of the same isolated invariant set. This may be done in several different ways depending on how general the information we want to extract is. Recently Franks and Richeson [24] proposed to use shift equivalence. Assume c : C --+ C and d : D --+ D are continuous maps. They are shift equivalent if there exist continuous maps r : C --+ D, s : D ~ C and a natural number m such that rc --
Conley index
415
= c m and sr = d m . We say that the homotopy classes of c and d are shift equivalent if there exist continuous maps r : C --~ D, s: D --+ C and a natural number m such that rc "~ dr, s d ~ cs, rs ~ c m and sr ~ d m . It is straightforward to verify that shift equivalence is an equivalence relation.
dr, s d = cs, rs
THEOREM 3.29. I f (N, L) and (N', L') are index pairs f o r an isolated invariant set S, then the homotopy classes o f index maps [fN,L] and [ f N',L'] are shift equivalent.
We define h(S, f ) , the homotopy Conley index of S as the shift equivalence class of [ f u , c ]. The correctness of this definition is justified by Theorem 3.29. One can prove that the Conley index for discrete dynamical systems has the same basic properties as the Conley index for flows. In particular it has the Wa2ewski Property, Continuation Property and Summation Property. The homotopy Conley index it is the most difficult to compute, because we do not know much about shift equivalence in the homotopy category of compact metric spaces. Therefore in applications we usually work with algebraic Conley indices, which may be obtained from the homotopy index by applying algebraic functors like the homology or cohomology functor. In the sequel we will study the simplest case when the homology coefficients are in Q and the phase space X is a compact ANR (for instance a manifold or a polyhedron). Under such assumptions one can show that in every neighborhood of an isolated invariant set there exist index pairs (N, L) such that H , ( N , L) is a finite dimensional vector space. Two endomorphisms of finite dimensional vector spaces e: E --+ E and f : F --+ F are shift equivalent if there exist linear maps r: E ~ E, s: F --+ F and a natural number m such that re -- f r, s f = es, rs -- e m and sr = f m . Applying the homology functor with rational coefficients to the homotopy Conley index we obtain the homology Conley index Con,(S, f ) as the shift equivalence of H , ( f x , c ) . Such shift equivalences may be found easily by means of the Leray reduction. Let e : E --+ E be an endomorphism of a finitely dimensional vector space. The generalized kernel of e is defined by gker(e)
" - -
U le-,, (O) ln ~ 1~}.
Since e(gker(e)) C gker(e), we have an induced isomorphism e"E/gker(e)
9 [x] --+ [e(x)] E E l gker(e).
We call e' the Leray reduction of e. PROPOSITION 3.30. I f e' is the Leray reduction o f an endomorphism e: E --+ E o f a finite dimensional vector space then e and e' are shift equivalent. PROPOSITION 3.31. A s s u m e e: E --+ E and f : F --+ F are two automorphisms o f finite dimensional vector spaces. They are shift equivalent if and only if they are conjugate. Since the Leray reduction of a finite dimensional endomorphism is obviously an automorphism, we have the following theorem.
416
K. Mischaikow and M. Mrozek
THEOREM 3.32. Two endomorphisms e and f of finite dimensional vector spaces are shift equivalent if and only if their Leray reductions are conjugate. By the above theorem we may consider the homological Conley index for maps on compact ANR's as a pair Con(S, f ) = (CH,(S, f ) , x , ( S , f ) ) , where CH,(S, f ) = {CHn (S, f)} is a graded finite dimensional space equal to
H , ( N / L , [L])/gker(fN,L), for any index pair (N, L) such that H , ( N / L , [L]) is finite dimensional and x,(S, f ) = {Xn(S, f)} is a graded automorphism on CH,(S, f ) equal to the Leray reduction of
(fN,L),.
Consider a hyperbolic fixed point x0 6 ]1~n of a C l-diffeomorphism f :]Kn ~ ]Kn. Let k denote the number of eigenvalues of D f (xo) out of the unit circle (counted with multiplicity). Let 1 denote the number of real eigenvalues of Df(x0) which are less than - 1 . The pair (k, l) will be referred to as the Morse index of x0. THEOREM 3.33. Assume xo is a hyperbolic fixedpoint of a Cl-diffeomorphism R n --+ R n. Then {x0} is an isolated invariant set and
Coni({xo})- { 0(Q, ( -
1) lid)
for i~: k, for i -- k.
(6)
PROOF. Without loss of generality we may assume that x0 = 0. We will first consider the case when f is linear, i.e., f ( x ) = Ax for some A 6 ]1~nxn . Let ]1~n = U ~) V be the decomposition of ]1~n into eigenspaces of A corresponding to eigenvalues with modulus greater than one and less than one, respectively. Let
A
c~
be the corresponding decomposition of A. From the decomposition it follows that {0} is the only compact trajectory and consequently it is an isolated invariant set. In order to prove (6) in the linear case first assume that A has n different eigenvalues. Choose a basis in which A has the block-diagonal matrix with one-dimensional blocks [~j ] corresponding to the real eigenvalues )~j and two-dimensional blocks
I rj c o s ~oj --rj sinqgj
rj sin qgj ] rj cos ~0j
corresponding to the pairs of complex eigenvalues rj e x p ( - i 99j) and rj exp(i qgj). For t [0, 1] let At be the matrix of the same block-diagonal structure and with corresponding blocks of the form
[h(Xj, t)]
and
h(rj, t)
[ cost~oj - sint~oj
sin t~oj ] cost~oj '
Conley index
417
where
h(u, t)"-- tu + (1 - t ) s g n ( u ) e x p ( s g n ( l u l - 1)ln2). Then the origin is the only non-trivial isolated invariant set with respect to each At and the homotopy property of the Conley index shows that Con({0}, A l) = Con({0}, A0). Thus we may assume that A = A0, i.e., A has a diagonal matrix in which - 2 appears 1 times, 2 appears k - l times and the remaining non-zero entries are 1/2 or - 1/2. Put N "-- {x + y e U 9 V • ]R"-k I Ilxll ~ 2, IlYll ~ 1}, L "-- { x + y 6 N I I I x l l > l } , B "-- {x E g I Ilxll ~< 1},
S'-
{xEglllxll-1},
It is easy to verify that (N, L) is an index pair of {0}. Let the mappings
d : (B, S) --> (B, S), o t : ( B , S ) --+ (N,L) be given by d(u, v) := (u, - v ) , a ( x ) := (x, 0). One can easily verify that the following diagram
N/L
fN,L> N/L d
B/S
l
> B/S
is commutative up to a homotopy. Thus we get the following diagram in homology
H,(N/L) (fN,L~ H,(N/L)
H,(B/S)
d,
> H,(8/S).
It is straightforward to verify that or. and d. are isomorphisms. Therefore Con({O} f ) = ,
(H,(B/S) d,) - { 0 ,
(Q, ( _ 1 ) / i d )
for/#k, for/=k.
418
K. Mischaikow and M. Mrozek
In order to obtain formula (6) in case of a linear map with multiple eigenvalues it suffices to construct a homotopyjoining the map A with a nearby map A' which has pairwise different eigenvalues and then apply the homotopy property. Now we shall consider the case of a general f. The fact that also in this case {0} is an isolated invariant set follows directly from the linear case and the H a r t m a n - G r o b m a n theorem. Let A := D f (0). We have
f (x) = A x + r(x), where r(x) --
o(llxll). For ,k E [0, 1] define
fz (x) := A x + ~r (x ) . For each fixed ~. 6 [0, 1] we can apply the Hartman-Grobman theorem to find 6()~) > 0 such that B(6()~)) := {x 6 IRn: Ilxll ~< ~()0} is an isolating neighborhood with respect to f)~, isolating {0}. A compactness argument shows that there exists a 6 > 0 such that B(6) is an isolating neighborhood with respect to fz for each ~. 6 [0, 1]. Obviously we can make small enough to ensure that Inv(B(6), f ) = {0}. Since fl = f, f0 = A, the thesis follows now from the homotopy invariance of the Conley index and the proved linear case. [2 THEOREM 3.34. Let xo ~ ]l~n be a hyperbolic periodic orbit of f , i.e., a hyperbolic fixed point of f d for some d E N. Let (k, l) be the Morse index of xo with respect to f d . Assume d is the minimal period of xo, i.e., f i (xo) 7~ xo for i = 1, 2 . . . . . d - 1. Then S := {x0, f (xo) . . . . . f d - l ( x o ) } is an isolated invariant set and Coni (S)
: {0
(Qd, D)
for i 7~ k,
(7)
for i -- k,
where D : Q d --+ Qd is given on the canonical basis {ei } i - - 1 , d of Q d by D(ei)--ei+l
fori=
l,2 ..... d-l,
D(ed)=(--1)lel. PROOF. Choose (N, L), an index pair of {x0} with respect to g := f d . Put x i :-- f i (xo), N i :__ f i (N), L i := f i (L) for i = 0, 1, . . . , d - 1. Taking N smaller if necessary, we may assume that N i 71N j -- 0 for i r j and f ( N d - l ) A N = 0. Obviously x i are hyperbolic fixed points of g with the same Morse index (k, 1). One can easily verify that (N i , L i) for i = 0, 1 . . . . . d - 1 is an index pair for g. It follows that N t := ~ i d--01 Ni is an isolating neighborhood with respect to f and (N', L') with
L' "-- U di =-0 1 L i is an index pair for f which isolates {x ~ x 1' H , ( N ' / L ' ) -- H , ( N ~
"'"
x d - l }" We have
O) G "" 9 H , ( N d - 1 / L d - 1 ) .
Hence it follows from Theorem 3.33 applied to g that H i ( N ' / L ' ) is zero for i ~ k and Hk (N ~/ L') is a d-dimensional vector space.
Conley index
419
Choose arbitrarily a generator a ~ 6 H k ( N ~ ~ and define recursively a sequence {oti}i=l,d_l of generators in Hk(N i / L i) by a i + l := Hk(f)(oti) for i = 0, 1 . . . . . d - 2. Then {ei}i=O,d_l with 8.i : : (0 . . . . . oti . . . . . 0) is a basis of H k ( N ' / U ) . It is straightforward to verify that (fN, L,)k(S i) = S i+l for i = 0, 1,2 . . . . . d - 2. We have also by (6) that -
_
0 .....
0)
= ((-1)lot ~ 0 . . . . . 0) -- ( - 1 ) l s ~ This shows that (fu',L'). is an isomorphism and formula (7) holds. EXAMPLE 3.35. Consider again the horseshoe map from Example 3.27. Take 1
3
4
Then (N, L) is an index pair for f and ( f u , L ) . has the matrix 1 1
-1 11 "
It follows that (fu,L)2 _ 0 and consequently the homological Conley index of the classical Smale's horseshoe is zero. EXAMPLE 3.36. This is not the case for the isolated invariant set S of the horseshoe in Figure 2. (N, L) as above is again an index pair but ( f u , c ) . has the matrix
I'
1
1
1]"
D
C R1
SO
S1
R0 A
B A~
Fig. 2. The G horseshoe.
B~
K. Mischaikow and M. Mrozek
420 Since in this
case
( f N , L ) 2 -- 2 ( f N , L ) , , it follows that
Conk(S) - / 0 / (Q, 2id)
fork#l, f o r k = 1.
3.3. References The original development of the Conley index for flows took place for the most part in the seventies. Again [7] and [75] are excellent sources. Early work includes that of Conley and Easton on isolating blocks [9]. Since that time the theory has undergone several developments. One important direction is the generalization to semi-flows on arbitrary metric spaces. For this one should consult the work of Rybakowski [74], Benci [2] and Benci and Degiovanni [3]. The first version of the Conley index for maps was presented by Robbin and Salamon [70]. Their definition of an index pair is more general than that presented here in that they only require that the compact pair (N, L) possess the property that the induced index map f u , c : N / L --+ N / L be continuous. The index based on the Leray reduction was proposed in [62]. In this paper it was also observed that the index map gives rise to an index automorphism which is also an invariant of the isolated invariant set. Szymczak [78] constructed the homotopy Conley index as a functor into an abstract category and showed that any other Conley index can be factorized through his homotopy Conley index. Recently Franks and Richeson [24] presented a version of Szymczak's approach based on shift equivalences.
4. The index and the structure of invariant sets
4.1. The structure of Morse decompositions In order to fully describe the dynamics of an isolated invariant set for which we have a Morse decomposition we need to understand the connecting orbits between the Morse sets. This will be done by relating the Conley indices of Morse sets to the Conley index of the total isolated invariant set. The construction of the algebraic machinery needed to do this in the general setting of Morse decompositions is rather formidable and will not be presented in these notes. However, to give the reader a flavor of the issues involved we shall indicate in some detail what happens in the setting of an attractor repeller pair decomposition. For the sake of simplicity we will restrict our discussion to the setting of flows. 4.1.1. Attractor repeller pairs. The goal of this section is to show that it is possible to reduce the answer to the question of the existence of a connecting orbit in Example 2.6 to a problem in linear algebra. More precisely we will show that given an isolated invariant set S with an attractor-repeller pair decomposition (A, R), the relationship between their Conley indices can be expressed in terms of a matrix called the connection matrix. The first step is to be able to determine the indices in a consistent manner.
Conley index
421
DEFINITION 4.1. Let S be an isolated invariant set and let (A, R) be an attractor-repeller pair decomposition. An index triple for (A, R) is a collection of compact sets (N2, Nl, No) where No C N1 G N2 such that: (1) (N2, No) is an index pair for S; (2) (N2, N1) is an index pair for R; (3) (Nl, No) is an index pair for A. THEOREM 4.2. Let (A, R) be an attractor-repeller p a i r decomposition o f an isolated invariant set S. Then, there exists an index triple (N2, Nl, No). PROOF. By Theorem 3.5 there exists an index pair (N2, No) for S. It is left to the reader to check that there exists a closed neighborhood U of A and a constant e > 0 such that if x 9 U and ~0([0, t], x) C N2 then #(~0([0, t], x), R) > e. Define Z "-- {y c N2 13 t > 0 x 9 U such that ~0([0, t l , x ) C N2 and ~o(t,x) - y}. Let Nl := No U Z. Then (N2, N1, No) is the desired index triple.
V]
Since No C N1 C N2 there exists on the chain level a short exact sequence 0 --+ C , ( N l , No) --+ C,(N2, No) --+ C , ( N 1 , No) --+ 0
which gives rise to the long exact sequence
9" --+ H n ( N I , NO) --+ H~,(N2, NO) --+ HI,(N1, NO) 2_~ Hn-1 (N2, N1) --+ " " .
(8)
But this is equivalent to 9.. --+ CH,, (A) --+ CH,, (S) --+ CH,, (R) -~ CH,,_ 1(A) --+ . . . .
(9)
The following theorem relates this exact sequence to the underlying dynamics. THEOREM 4.3. Let (A, R) be an attractor-repeller p a i r decomposition o f an isolated invariant set S. I f S = A U R, then On = O.
PROOF. Let U and V be disjoint neighborhoods of A and R, respectively. Since S = A U R there exists an index triple of the form (N a U Nff, N a U NOR, N~ U N~), where N a C U and N~ C V. Equation (8) now takes the form
9.. + H,, (N.~ v N:, No~ . N:) + t+,, ( N # . N~, N 2 . N : ) -+ H~7(NA U Nff , NIA U N~) -~ Hn-i (N # U N~, N~ U N~) - + . . .
K. Mischaikow and M. Mrozek
422
which by excision is equivalent to
9"" -+ Hn (N~, N~) --+ Hn (N1A, N ~ ) + Hn (NR , NR) --+ Hn(Nff , N~) -~ Hn-1 (N R, N A) - + ' " . Since the sequence splits,
0n =
0.
[2
It is the contrapositive of this theorem which is typically of use in applications. COROLLARY 4.4. If On(A, R) 7~ O, then S 7~ A L) R, i.e., C(R, A; S) ~ 0. REMARK 4.5. Example 3.18 shows that the converse of this corollary is not true. In preparation for the rather complicated algebra which will be introduced in 4.1.2, we will now try to present the information that is carried by 0, in the form of a matrix. To simplify the presentation we shall now only consider homology with field coefficients. The information which we have consists of three parts. (1) A collection of graded vector spaces arising from the indices of the attractor and repeller,
CH,(A) ~) CH,(R). (2) The index of the total invariant set S,
CH,(S). (3) The connecting homomorphism or boundary map On which is a degree - 1 operator, i.e., it sends n-level homology to n - l-level homology. We shall, from now on, denote this homomorphism by
O,(A, R) "CH,(R) --+ CH,(A). We now pose the following question. Let us view CH,(A) @ CH,(R) as a chain complex with a boundary operator A. Can we choose A in such a way that the resulting homology H A , is isomorphic to CH,(S)? To be more precise, let
An "CHn(A) ~) CHn(R) --+ CHn-I (A) G CHn-1 (R), denote the obvious restriction of A to each homology level of the indices. Then, by definition ker(An) H A n := . Image(An+l)
Conley index
423
Thus we are asking whether it is possible to choose A in such a way that
HA,;~CHn(S),
n=0,1,2
.....
Observe that if S = A U R, then C H , ( S ) ~, C H , ( A ) G C H , ( R ) . In this case we can choose A = 0. This is a special case of the following proposition. PROPOSITION 4.6. If we define
A=[
~0
O,(A, R) ] I " C H , ( A ) 9 C H , ( R ) --+ C H , ( A ) G C H , ( R ) 0 J
then H A , ~ CH,(S). PROOF. We begin by checking that A is a boundary operator, i.e., that A is degree - 1 and A o A = 0. The first is obvious since On is of degree - 1 . The second condition is equally obvious. We now need to show that
H A,; ,~ CH,, (S),
n = 0, l, 2 . . . . .
Observe that ker A,, = CH,;(R) G ker O,, (A, R) and image A,,_ 1 = i m a g e 0,;- l (A, R). Thus, we need to show that
CH,; ( S) ~
CH,,(A) 9 kerOn(A, R) image 0,,+l (A, R)
~
CHn(A) image 0,,+1 (A, R)
9 ker Ot~(A, R).
Now consider the sequence
9. . - + CHn(A) -~ C H , ( S ) -~ CHn(R) -~ CHn-I (A) - + . . . which, since we are working with field coefficients, can be written as
9.. --> CH,,(A) ---->image/,, • L,, --+ CH,,(R) -~ CH,,-I (A) ---> . . . .
K. Mischaikow and M. Mrozek
424 By exactness Ln ~ ker3n(A, R) and
CH,,(A) image in ~ . image 0n+l (A, R)
IS]
The matrix in Proposition 4.6 is the simplest example of a connection matrix which will be described further in the next section. EXAMPLE 4.7. We now return to Example 2.3 and show that for all c > 0 and 0 < )~ ~< 1, there exists a connecting orbit from ( - ~ / ~ , 0) to (~/~, 0). For the index computations we shall use the field coefficients Z2. In Example 3.20 it was shown that CH,(Sc.x) = O. Linearizing about the equilibria shows that
CHk ( A ) ~
Z2 0
if k = 1, otherwise,
CHk(R) ~'~ { Z2 0
if k - 2, otherwise.
Thus, the portion of the exact sequence (9) which is of interest is
9..--+ CH2(S) --+ CH2(R) -~ CHI (A) --+ CH1 (S) --+ ... which of course reduces to 9 9 9----~ 0 ----~ Z2 - ~ Z2 ~
0---~ . . ' .
Since this sequence is exact 02(A, R) ~ O. By Corollary 4.4 there exists a heteroclinic orbit from R to A. We can abstract this example into the following proposition. P R O P O S I T I O N 4.8. Assume that S is an isolated invariant set with an attractor-repeller pair decomposition (A, R) consisting of twofixed points. Furthermore, assume that
CH,,(R) ~ { Z 0
if n - k + l, otherwise,
CHn(A) ~ { Z 0
and C H , ( S ) ~ O. Then, there exists a heteroclinic orbit from R to A.
if n = k, otherwise,
Conley index PROOF. By Theorem 3.22, S -r A U R. Thus, by Theorem 2.4, C (R, A; S) :/= 0.
425 F-1
Consider Proposition 4.8. This is a pure existence result; the conclusion is that there exists an orbit q)(R, x) C S such that lim (p(t, x) = A, t-----~ r
lim ~0(t, x) = R. t -----~ - - r
What it does not do is describe the dynamics on S as a whole. Clearly, in this simple example it is obvious that the only type of orbits which can occur are the fixed points A and R and the heteroclinic orbits from R to A. However, for the sake of clarity it is worthwhile trying to recast this example in the context of semi-conjugacies. More complicated examples will be presented in later sections, but there the technical difficulties can overwhelm the simple idea. With this in mind, therefore, we shall prove the following theorem. THEOREM 4.9. Let q9 be a flow f o r which S is an isolated invariant set with an attractorrepeller pair decomposition (A, R). Assume that CH,(S) ~ CH,(A) 9 CH,(R). Let ~ : IK x [ - 1, 1] --+ [ - 1, 1] be the flow on the unit interval generated by 2 = ( x 2 - 1). Then, there exists a continuous surjective function p : S --> [ - 1 , 1] such that A = p-l(-1),
R = p-J(1)
and the following diagram commutes RxS
Rx [-1,1]
~p
g,
>~S
> [ - 1 , 1]
PROOF. Let V :S ---> [0, 1] be a Lyapunov function for ~0 as defined by Theorem 2.7. Because V is strictly decreasing off of A U R, given x 6 C ( R , A; S) there exists a unique tx ~ R such that 1
5.
K. Mischaikow and M. Mrozek
426
Observe that the function r :C(R, A; S) ---> IR given by r (x) = tx is continuous. Now, define p : S --+ [0, 1] by -1
p(x) --
1
2 ?tan- 1 tx
i f x ~ A, i f x ~ R, if x 6 C(R, A; S).
Since CH,(S) ~ CH,(A) @ CH,(R), C(R, A; S) 7~ 13, and hence, p is surjective.
D
There are several points that should be remarked concerning the proof of this theorem. The first is that one uses the decomposition and the Lyapunov function to define the semiconjugacy. The second is that it is the Conley index information that allows one to conclude that p is a surjection. On a more general level, the reader should note that a theorem of this form provides a global description of the dynamics. The existence of a semi-conjugacy provides a lower bound on the complexity of the dynamics. Since p is surjective, every trajectory of 7r is lifted to 4~. Of course this lifting need not be one to one, and hence, the dynamics of r may be more complicated than that of gr. Just as one can decompose isolated invariant sets, one can decompose sets of connecting orbits. Let (A, R) be an attractor-repeller pair decomposition of S with associated boundary operator 0 (A, R). A separation of C (R, A) is a collection {Cj (R, A) I j = 1. . . . . J } of open subsets of C (R, A) such that J
C(R,A)--UCj(R,A). j=l
If N is an isolating neighborhood for S, then there exists Nj C N such that Nj is an isolating neighborhood for Sj := A U R U C j ( R , A). Observe that (A, R) is an attractorrepeller pair for Sj, and hence, there is an associated boundary operator O(A, R; j). THEOREM 4.10 (McCord [45]). For any separation of C(R, A) J
O(A,R)--~O(A,R;j). j=l
4.1.2. Connection matrices. In the previous section we constructed a connection matrix for the case of an attractor repeller pair. We now wish to do the same for a Morse decomposition. As was indicated earlier, the construction is not trivial. For this reason we will only describe the properties that connection matrices possess, referring the reader to [2528,69,71 ] for further details. We remind the reader that throughout this section we will be using homology with field coefficients. In practice one usually uses Z2 coefficients since this avoids one having to deal with orientations.
427
Conley index
Let A,4(S) = {M(p) [ p 6 (79, >)} be a Morse decomposition. Each Morse set is an isolated invariant set, and therefore, has a Conley index of the form CH,(M(p)). Let
A "@ CH,(M(p)) ---> ( ~ CH,(M(p)) pET)
pc7)
be a linear operator which will be written as a matrix
A=[A(p,q)] where A(p, q) : CH,(M(q)) --+ CH,(M(p)). A is upper triangular with respect to the partial order > if p ;r q implies A (q, p) -- 0. A is a boundary operator if A o A = 0 and it is a degree - 1 map, i.e., it maps nth level homology to (n - 1)st level homology. Finally, for each interval I E 2-(79, >) define A ( I ) -- [ A ( p , q)]p,qEI "~
CH,(M(p)) --> ~
pEI
CH,(M(p)).
pEI
If A is a connection matrix, then it satisfies the following four properties: (1) A is upper triangular. (2) A is a boundary operator. (3) For every interval I E 2-(7~, >) kerA(1)
H , A ( I ) "-- image A(I)
~ CH,(M(I)).
(4) Consider a pair of adjacent intervals (I, J) E I2 (~, >). Observe that there are three associated chain complexes: (1) ( ~ p E 1 C H , ( M ( p ) ) with boundary operator A(I), (2) CH,(M(p)) with boundary operator A ( J ) , and (3) CH,(M(p)) with boundary operator A ( I J ) . Furthermore, under inclusion and projection the following is a short exact sequence,
(~pEJ
(~pEZJ
0--> ~CH,(M(p)) --> 0 pEI
pEIJ
CH,(M(p)) --->@CH,(M(p)) --+ O. pEJ
Applying the boundary operators one obtains the following long exact sequence
9..-+ H,,A(I) --+ H n A ( I J ) ~ H,,A(J) --+ H,,_IA(/) --+ . . . . Then, this sequence is isomorphic to the long exact sequence for the attractor repeller pair (M(I), M(J)) decomposition of M ( I J)
9..--+ CHn(M(I))--+ CHn(M(IJ))--+ CH,,(M(J)) --+ CHn-, ( M ( I ) ) - - + . . . .
K. Mischaikow and M. Mrozek
428
From property (4) one can deduce that given adjacent Morse sets M (p) and M (q), i.e., a pair of Morse sets such that (M(q), M(p)) ~ 2-2(79, >), then
,4(qp) _ [ O O,(M(q), M(p)) ] 0 0 " It is important to mention that the four properties listed above do not define the connection matrix. For the proper definition the reader is referred to [26]. The fundamental theorem is the following. THEOREM 4.1 1 (Franzosa [26]). For any isolated invariant set S with Morse decomposi-
tion M (S) the set of connection matrices are not empty. As is implied in the theorem, connection matrices need not be unique. EXAMPLE 4.12. Consider once again Example 2.8. We shall u s e Z2 coefficients for the index computations. The associated connection matrices must be linear operators of the form 3
3
,4"~CH,(M(p))--~ OCH,(M(p)). p=l
p=l
From Theorem 3.13 each of these is a one-dimensional vector space implying that A is a 3 x 3 matrix. Using the upper triangularity with respect to > and the fact that ,4 is a degree - 1 map one obtains:
A--
00 0
00 0
?1 ? . 0
Now consider the case of 0 < c 0 2 and 1 is unrelated to 2 or 3. Thus upper triangularity with respect to >0 gives
,4 0
I
O 0 0 0 0 0
O] ? . 0
In Example 3.21 it was shown that CH, (S) is one dimensional. Thus applying property 3 of the connection matrices to the interval {3, 2, 1} forces
Ao--
0 0 0
0 0 0
01 1 . 0
Conley index
429
For the case c ~ ec the unknown entries are computed directly using property 4. In particular, one considers the attractor-repeller pairs (M(2), M(3)) and (M(1), M(3)) and shows that C H , ( M ( 2 3 ) ) ,~ 0 and C H , ( M ( 1 3 ) ) ~ O. This implies that
Aoc--
i
0 0 0
0 0 0
1] 1 . 0
4.1.3. E x a m p l e - bistable gradient like systems 9 In Section 4.1.1 the Conley index was used to obtain a semi-conjugacy describing the dynamics of an attractor repeller pair decomposition for which a connecting orbit exists 9One can ask whether similar results can be obtain in the context of Morse decompositions 9The answer is yes as the following example indicates 9 Consider the following assumptions: (A 1) A is a global compact attractor for a semi-flow q) on a Banach space 9Furthermore, if q9 denotes the restriction of q) to ,4 then ~0 defines a flow on A. (A2) Under the flow q) :IR x .,4 --> .,4
.Ad(A) = { M ( p + ) l p = O . . . . . P - 1} U {M(P)} with ordering P > P - 1+ > . . . > 1+ > 0 + is a Morse decomposition of A. (A3) The Conley indices of the Morse sets are
CHk(M(P))
/ Z2 [0
i f k = P, otherwise,
and for p - 0 . . . . . P - 1
CHk (M ( p + ) ) ~ { Z2 0
if k -- p, otherwise.
(A4) The connection matrix for A4 (A) is given by -0 0 A
m
D1
0
0
D2
0
m
0
where for p - 0 , . . . ,
...
9 9 9
O
"-
0
0 0
Dp 0
m
m
P - 1
cH (M(p )) | cH,(M(p+)) --+ CHp_! ( M ( p - 1-)) (9 CHp_! ( M ( p
-
1+))
K. Mischaikow and M. Mrozek
430
is given by
DP--['
1
1
'1
and Dp "CHp(M(P))
--+ C H p - I ( M ( P
-
1-)) ~ C H p _ 1( M ( P - 1+))
is given by
De--
['] 1
"
These assumptions may seem somewhat strange at first, but in fact are satisfied by a wide variety of systems [52]. (A1) is typical of many dissipative systems [37,36,81]. The simplest interpretation of assumptions (A2) and (A3) is that the Morse sets consist of hyperbolic fixed points, with the equilibria on the pth level having a p dimensional unstable manifold. Finally, (A4) is a statement that each Morse set on the pth level connects to every Morse set on the (p - 1)st level. The simplest ordinary differential equation that possess these properties is the following. Let D P "-- { z -
ze-1) I Ilzll ~< 1} C R P
(zo . . . . .
be the closed unit ball in R P and S P - l = OD P be the unit sphere. Let 7z P : ~ • D P --+ D P denote the flow generated by the following system of ordinary differential equations -
Q~ -
( Q ~ , ~)~,
E S P-I,
(10)
r ~ [0, 1],
(11)
~
? -- r(1 - r), where
O
__
1
0
0
1
o
0
...
0
,
1
T
The dynamics of 7z e is easily understood if one realizes that (10) is obtained by projecting the linear system ~ = Q z onto the unit sphere. Let ep+ - ( 0 . . . . , +1 , ... , 0) be the unit vectors in the pth direction. Then one has the following result.
Conley index
431
THEOREM 4.13. Given assumptions (A1)-(A4) there exists a continuous surjective map f " A ~ D P and ~9 a flow obtained by an order preserving time reparameterization o f r such that the following diagram commutes RxA
idxf I
(o
>A
lPP I f
IR x D e
> De
where M ( p +) -- f - I (eip) f o r 0 0 CH,(M(p-)) ( ~ CH,(M(p+)) p e t)
p e t)
takes the form
where
cm+, (M(p+)) pep
(9 CH,(M(p-)) p e t)
and
Te(q-, p+) "CH.+I (M(p+)) --+ CH.(M(q-)). Two comments need to be made at this point. The first is that technically the entries A+ in A~ cannot be the connection matrices A• for A//(S+), since they are defined on different spaces. One of the contributions of [68] was to overcome this technical obstacle and justify the expression in (14). Second, while in principle TE may change as a function of e, it is always possible to choose a sequence 6n ~ 0 along which Te,, is constant. The set of matrices obtained
Conley index
433
through the above mentioned limiting process are referred to as singular transition ma,]--sing trices and the set of singular transition matrices is denoted by _ 1, l"
Consider T e ,7--sing -~,1 and assume p, q are adjacent elements with respect to the ordering > for which T ( q - , p+) r O. Then, there exists a sequence e,, --+ 0 for which Te,, ( q - , p+) -r 0. This in turn implies the existence of a connecting orbit Fe,, from M1 (p) to M - l (q) for the parameter value e,,. Taking the limit of Fe,, as e,, --+ 0 implies the existence of a connecting orbit Mx (p) to M)~(q) for the dynamical system defined by (12) for some value of )~ between - 1 and 1. Thus, non zero entries in the singular transition matrix can be used to conclude the existence of connecting orbits. A generalization of this argument leads to the following theorem. 9
,-/-.sing
_
THEOREM 4.14 Let T ~ ~__1, l and assume T (q , p+) 7~ O. Then there exists a finite sequence 1 > Xl > )~2 > " ' " > )~k > 0 and rk+l -- p >xk rk > . . " >)~2 r2 >x~ rl = q, elements of (T9, >) where >xi is the flow defined ordering for the Morse decomposition of (12) at parameter value Xi. This form of transition matrix is by far the most general. In fact, the only necessary assumption is the existence of Morse decompositions of isolated invariant sets which are related by continuation. There is, however, a price to be paid for this generality. Observe that the algebraic properties of Te for e small are a complete mystery. For example, it is reasonable to ask what is the relation between Te and T--eI . Unfortunately the spaces on which T, and T_e are defined are different, and hence, even formalizing the question poses some difficulty. These algebraic questions led to the development of another transition matrix called a topological transition matrix denoted by Ttop -l.l
CH,(M1 (p)) ~ ( ~ CH,(M_I (p)). pE~
"~
pET)
Using the same setting as in the discussion of the singular transition matrix, the idea behind topological transition matrices can be described as follows. Since each Morse set M (p) continues over R, there exist isomorphisms
F-l,1 (p) " C H , ( M I (p)) ~ C H , ( M _ I (p)). Similarly, since S continues over R, there is an isomorphism
F_I.I " CH,(SI) --~ CH,(S_I).
UpcPM+l (p),
Furthermore, if S+l there exists an isomorphism -
++, O
peP
i.e., if the set of connecting orbits is empty, then
c m (M• (p>) --, cm(s+,>.
K. Mischaikow and M. Mrozek
434
Thus, if there are no connections at X = 4-1, then the following diagram can be constructed:
~pcP F-t,l (p) (~pcP CH,(MI (p))
~- ~ p c P CH,(M_I (p))
F-I.l
CH,(SI)
~
CH,(S_I)
In general, this diagram is not commutative and it is precisely its failure to commute that gives information about connecting orbits. For the purpose of applications it is useful to be able to express this last statement in the form of a matrix. Of course this requires choices of basis on each of the spaces. This can be done as follows. Let/31 be a basis for ~]~p~p CH,(MI (p)) and let 13-1 = ~
F - l , l (p)(Bl)
p6P be a basis for E[~p~e CH,(M_I (p)). Using these bases define the topological transition matrix by T -1,1 t~ = ~ - l o
p6P
F - l , l (p) o q~-I
Observe that this construction only makes sense when the Morse decomposition continues over the entire parameter space, and when there are no connecting orbits with respect to the Morse decomposition at the parameter values )~ = 4-1. In this setting it is perfectly clear what is meant by the composition of two transition matrices. It is equally obvious that Ttop
-,,,-
top (rl,-l)
- 1
Furthermore, Ttop _ l, l shares many properties with elements o f ,~sing l, l" In particular, non-zero off diagonal entries imply the existence of connecting orbits for some parameter values b e t w e e n - 1 and 1. An important fact is that when both singular and topological transition matrices are defined then they are "equal". Equal needs to be put in quotation marks since the maps are defined on different vector spaces. However, as is shown in [46] there exists a canonical isomorphism between these spaces which justifies this claim. -
EXAMPLE 4.15. To see how the transition matrices can be used in practice, consider Example 2.8. Again, we use Z2 coefficients in the calculations. From Example 2.10 we know that the Morse decomposition continues over the interval c > 0. Furthermore,
435
Conley index
A0 and Aoo were calculated in Example 4.12. Thus, augmenting (2) by the equation -- e(c - co)(c - coo) where 0 < co 0, there exist the desired connecting orbits with arbitrary winding numbers. Under p each orbit with a different winding number projects to a different solution of (15). Therefore, there are an infinite number of distinct connecting orbits.
4.2. Periodic orbits Given an isolated invariant set S with a Morse decomposition .L4 (S), Theorem 2.11 implies that the only type of dynamical objects that lie in S, but not within the Morse sets are connecting orbits. The theme of Section 4.1 was how to use the Conley index to prove the existence of and describe the structure of these solutions. Theorem 2.19 implies that all
438
K. Mischaikow and M. Mrozek
dynamics in an invariant set either consist of connecting orbits or lie in the chain recurrent set. With this in mind we now turn to the question of how can the Conley index be used to understand recurrent dynamics. The simplest form of recurrence is that of a periodic orbit. As Example 3.18 demonstrates it is not enough to know that the index of an invariant set S is that of a periodic orbit to conclude that S contains a periodic orbit. What is surprising, however, is that the only additional necessary hypothesis is that the invariant set have a minimal amount of recurrence. 4.2.1. P o i n c a r d s e c t i o n . To insure recurrence we shall make use of a Poincar6 section. Since we are adopting the point of view that it is the isolating neighborhood which is the observable object rather than the invariant set, we want to formulate all of our hypotheses in terms of N, rather than S. Therefore, we employ the following definition. DEFINITION 4.18. ,~ C X is a P o i n c a r d s e c t i o n for N under tp if Z, is a local section, ~,U " = ~, O N is closed, and for every x E N there exists tx > 0 such that (p(tx,X) 6 E.
(16)
Observe that it is not necessary to know S in order to find a Poincar6 section. Also, Z, is not required to be a subset of N. Indeed, if N has an exit set, no subset of N can be a Poincar6 section, as there will be points in N whose orbits exit N before they cross the section. The following example is included to indicate that this definition is sufficiently weak to make it possible to prove the existence of Poincar6 section in the context of a differential equation. EXAMPLE 4.19. The Nagumo equations (see [76] for a derivation of the equations) are given by, fi
m
i; -
V~
Ov - f (u) + w ,
(17)
0
The nonlinearity f is a cubic like function as indicated in Figure 3. In this problem, 0 is treated as a constant rather than as a parameter value. ~0e denotes the flow on R 3 generated by (17) for a fixed e. For e = 0 the Nagumo equation becomes a parameterized family of differential equations in the plane with parameter w. In particular, for each fixed w one has a flow ~ w ' R • R 2--+R 2 generated by the f a s t s y s t e m
i; -- Ov - f (u) + w.
(18)
Conley index
439
w
q
) u
Fig. 3. The nonlinearity of the Nagumo equation.
At e = 0 the equilibria of (17) are given by the set {(u, 0, w) I f(u) = w}. Let [0, wl] be an interval such that for c 6 [0, wl], there are three branches of solutions to f(u) -- c (see Figure 3). Observe that for each fixed value, w = c, the dynamics of (18) is similar to that described in Example 2.8. In particular, the left and right roots of f (u) -- c give rise to saddle points in flow 7tc. Extending this argument to all w 6 [w0, w l] one obtains two pa'rameterized branches of equilibria q (w) and p(w), respectively. For an appropriate choice of 0 one can prove, using the same type of argument employed in Example 4.15, that there are parameter values w, and w*, with 0 < w, < w* < wl, for which there are heteroclinic connections y, from q(w,) to p(w,) and V* from p(w*) to q(w*), respectively. Let Q be the set of equilibria given by q(w) for w 6 [w0, wl] and P be the set of equilibria given by p(w) for w 6 [w0, wl ]. Now observe that for e > 0, tb < 0 along the curve Q and tb > 0 along the curve P. This suggests that for each fixed 0 < e 0, but small and let K0 -- {(u, v, w) 6 B n TQ I w -- (w* + w,)/2}. Since tb < 0 along the curve Q, choosing B within a sufficiently small neighborhood of Se implies that K0 is a local section. Clearly if (u, v, w) stays in E for all forward time under q9e, then its forward orbit passes through the tubular neighborhoods in the periodic progression of TQ --+ T, --+ Tp --+ T* ~ TQ. This is because the flow in each tubular neighborhood is determined by the flow near the segments. Choose the time T mentioned about to be longer than the time needed for any orbit in Se to pass through all four tubular neighborhoods. Observe that if Se -- 0, then B - is a Poincar6 section for E. Thus, what needs to be dealt with are those points that remain in E for all positive time. Let E "-- ( B - \ K) U K0.
We claim that Z is a Poincar6 section for E. E U Y, is clearly closed. It is a section to the flow because both B - and K0 are. Finally, we must show that the forward orbit of every point in E intersect 3 . Clearly if (u, v, w) stays in E for all forward time under q9e its forward orbit intersects/7. Thus, we only need to worry about points (u, v, w) for which there exists a time r0 > 0 such that qg~(r0, (u, v, w)) ~ E. Since Inv(E, qgc) = Inv(B, qg~), this is equivalent to the existence of rl > 0 such that qge(rl, (u, v, w)) r B. This in turn implies that there exists r2 > 0 such that qge(rl, (u, v, w)) E B - . If qge(rl, (u, v, w)) 6 B - \ K then qge(rl, (u, v, w)) E Y,. So we have further reduced the problem to qge(rl, (u, v, w)) B - n K. Observe, however, that (u, v, w) 6 E implies that there exists a positive time 0 < s < T such that qge([0, s], (u, v, w)) C B and qge(s, (u, v, w)) 6 K0. 4.2.2. Existence ofperiodic orbits. The following theorem provides very general conditions under which an isolated invariant set must contain a periodic orbit. THEOREM 4.20. I f N is an isolating neighborhood which admits a Poincard section Z, and f o r all n E Z either dim CH2n (Inv N) - dim CHzn+l (Inv N)
(19)
dim CH2n (Inv N) -- dim CH2n-! (Inv N)
(20)
or
where not all the above dimensions are zero, then Inv N contains a periodic trajectory.
441
Conley index
COROLLARY 4.21. U n d e r the above hypothesis, iflnv N has the Conley index o f a hyperbolic p e r i o d i c orbit, then Inv N contains a p e r i o d i c orbit. A key step in the proof of Theorem 4.20 is the following exact sequence which relates the index of an isolated invariant set which admits a Poincar6 section with the index of the invariant set under the Poincar6 map. THEOREM 4.22. A s s u m e N is an isolating n e i g h b o r h o o d f o r the f l o w ~p a n d a s s u m e that N admits a Poincard section ,g,. Let H denote the c o r r e s p o n d i n g Poincard map, S = Inv(N, qg), a n d K = 3 fq S. Then, there is the f o l l o w i n g exact s e q u e n c e o f homology Conley indices:
9. . - + C H , , ( S , qg) --+ C H n ( K , H )
i d - X,, ( K, 17) ) CH,,(K,/7)
--+ C H n - l (S, ~p) ~
.... (21)
As was indicated in the introduction and as the following simple examples will demonstrate the Poincar6 map may carry more information than the index of the flow. EXAMPLE 4.23. Let N be an isolating neighborhood for a flow q9 and let S = Inv(N, qg). Assume that N admits a Poincar6 section ~,. L e t / 7 be the induced Poincar6 map. Furthermore, assume t h a t / 7 is the G-horseshoe map of Example 3.36. Let K -- Inv(~,,/7). If we now apply Theorem 4.22, then the only nontrivial portion of (21) is
9.. -+ CHI (S, ~o) -+ CHI ( K , / 7 )
id--xi (K,17) ) CHI
( K , / 7 ) --~ C H o ( S , qg) ~
....
(22) Observe that id - X1 ( K , / 7 ) = 1 - 2 = - 1, and hence (22) becomes 9.. --+ 0 --+ CHI (S, 99) --+ Q -1
Q --+ C H o ( S , qg) --+ 0 --+ . . . .
Exactness of this sequence implies that C H , ( S , 99) = O. It is worth emphasizing just how much information has been lost in the flow index. Since C H , ( S , 99) - - 0 , we can draw no conclusion from this information. Since the map index is nontrivial, the Wazewski principle implies that K and hence S is nonempty. In fact, however, the map index can be used to say much more about the structure of K. In particular, the fact that x I(K, H ) = 2 allows one, by the direct application of a result of Baker [ 1], to conclude that the entropy of K is bounded from below by In 2. On a more general note, as will be made clear in Section 4.3, the spectrum of x , ( K , H ) can be used to conclude the existence of rather complicated orbit structure in K. From (21) it is clear that any information carried by spectral values different from 1 is lost in the flow defined index.
K. Mischaikow and M. Mrozek
442 4.3. The topology of S
As was discussed in the introduction, the topology of invariant sets can change dramatically under even small perturbations. Since the Conley index is stable with respect to perturbations one cannot expect that knowledge of the index will immediately give information about the structure of the invariant set. In fact, even if the Conley index of S is extremely complicated, it is possible that S consists of a single equilibrium point. In Section 4.1, we were able to obtain additional information about the structure of S by assuming knowledge of an index filtration. In Section 4.2, the existence of periodic orbits could be concluded if one knew that there was a Poincar6 section for the isolating neighborhood. Another approach, which we now describe is due to Floer [18] and is based on the idea of restricting the topology of the isolating neighborhood. To be more precise, let qgz : I1~ • X ~ X be a parameterized family of dynamical systems with )~ 6 [0, 1]. Let So be a normally hyperbolic invariant set for qg0 and let N be a tubular neighborhood for So. Then N is an isolating neighborhood for So. There are two observations to make at this point. The first is that any retract ot:N --+ S is homotopic to the canonical projection of N onto S coming from the tubular neighborhood structure. The second is that the homotopy Conley index of S is essentially the Thorn complex for the unstable disk bundle for S. Using this Floer obtains the following theorem. THEOREM 4.24. Assume that N is an isolating neighborhood for r for all )~ ~ [0, 1]. Then
(otls~)* : H*(So) ~ H*(SI) is an injection. In other words, the topology of the invariant set can only increase as the flow is continued. The simplest example of this phenomenon is to consider a hyperbolic saddle in a planer flow. This is clearly a hyperbolic invariant set with a disk as a tubular neighborhood. Now consider a continuation of the flow that preserves the hyperbolic equilibrium but introduces a degenerate fixed point on one of the trajectories that passes close to the equilibrium. This new isolated invariant set consists of two points, thus the topology of the isolated invariant set has become more complicated. This result has far reaching consequences. This lower bound on the co-homology of the invariant set can be used to estimate the cup length of S1. In turn, if one knows that ~01 is a gradient flow, then one has a lower bound on the number of critical points of the potential. It should be noted that in [ 18] Floer showed that this construction can be carried out in the setting of equivariant dynamics. Work in a similar spirit was also carried out by Poiniak [67].
4.4. Symbolic dynamics In Section 3.2 we saw that the Conley index of a U-horseshoe is trivial. This is not surprising, because one may easily continue the horseshoe to the empty set. This also means
Conley index
443
that, similar to the case of periodic orbits, the index itself is not sufficient to reconstruct the horseshoe dynamics. So far we do not know what assumptions, if any, would guarantee the existence of an embedded horseshoe. However it is possible to formulate assumptions in terms of the Conley index which imply the existence of a semiconjugacy onto shift dynamics, i.e., a continuous map onto bi-infinite sequences of prescribed set of symbols, which commutes with the shift dynamics on the sequences. To be more precise, let r k := {a : Z ~ { 1, 2 . . . . . k} } denote the space of bi-infinite sequences on k symbols with the product topology. Let o- : Sk -+ Zk be the shift map given by (o-(a)),, "--an+l. The semiconjugacy onto the shift dynamics is a continuous surjective map p : Inv(N, f ) --+ r k such that the diagram
Inv(N, f )
j
.
> Inv(N, f ) (23)
Sk
~
> Sk
commutes. Returning to Example 3.27 we easily see that replacing the isolating neighborhood N by the set R := R0 U R l we obtain another isolating neighborhood which isolates the same isolated invariant set. This suggests how the semiconjugacy map may be defined in situations when the isolating neighborhood decomposes into a number of disjoint compact components as in the case of R. Namely, if N = No U Nl U - - - U Nk is a union of k disjoint compact sets then we define the map r : N ~ {1,2 . . . . . k} by r (x) = i if and only if x ~ Ni and the map p" Inv(N, f ) --+ Sk by p ( x ) " - - { r ( f / (X))}i~=_~. The map p is continuous and the diagram (23) commutes. The hard part in completing the construction of the semiconjugacy is to show that p is surjective. This is guaranteed by the following theorem. THEOREM 4.25. Let f : X ~ X be a homeomorphism on a locally compact metric space. Assume that N = No U Nl is an isolating neighborhood under f where No and N1 are disjoint compact sets and for k = O, 1
Con,l(Nk)=
(Q, id) 0
i f n ~ 1,
otherwise.
Then, Nkl :-- (Nk n f (Nk)) U (Nk n f (Nl)) U (N1 N f (Nl)) for k, 1 ~ {0, 1}, k 5/: l, are isolating neighborhoods, l f additionally X* (Nkl ) is not conjugate to the identity, then there
444
K. Mischaikow and M. Mrozek
exists a d E 1~ and a continuous surjection p ' I n v ( N , f ) --+ .~v'2 such that the following diagram
Inv(N, f )
fd
> Inv(N, f ) (24)
~r,2
o"
> z~ 2
commutes.
A disadvantage in the above theorem is the fact that one needs four isolating neighborhoods and the corresponding Conley indices to verify the existence of a semiconjugacy onto the shift dynamics. Below we present a theorem which shows that two isolating neighborhoods are sufficient. Given a linear operator M let spec(M) denote the set of eigenvalues of M where the eigenvalues are repeated according to their multiplicity. Given two sets A and B, their amalgamation A H B is obtained by taking the union of A and B but treating elements common to both A and B as distinct elements in A H B. For example, {1, 2, 2, 3 } LI {0, 0, 2, 3 } = {0, 0, 1, 2, 2, 2, 3, 3}. A set Q c C is cyclic if Q = ~ - ~ P l Oi where Oi D Q j = ~ for i :~ j and Qi - {z E g lz ni - mi for some ni E Z +, mi E •}.
THEOREM 4.26. Let f " X --+ X be a homeomorphism on a locally compact metric space. Assume that N C X is an isolating neighborhood which is the disjoint union of compact sets No and N1, i.e., N= NoUNI. Let S "-- Inv(N, f ) and Si "-- Inv(Ni, f ) , i -- 0, 1. If f o r some positive integer n spec(xn(So)) H spec(xn(S,)) q2 spec(xn(S)) or
spec(xn(So))\(spec(xn(So)) H s p e c ( x n ( S , ) ) ) is not acyclic, then there exists a positive integer d and a continuous surjection p" S --+ r 2 such that diagram (24) commutes.
Recently Szymczak [79] presented a generalization of the Conley index theory which keeps track of the components of the isolating neighborhood. The generalization uses index pairs satisfying certain extra conditions and allows one to prove a criterion for a semiconjugacy onto the shift dynamics on k symbols restricted to a certain transition matrix which
Conley index
445
may be deduced from the generalized Conley index. The theorem requires the index computation for only one isolating neighborhood and additionally, guarantees the existence of periodic points corresponding to every periodic sequence of symbols. Unfortunately, the presentation of this generalization of the Conley index is beyond the scope of this paper.
4.5. Fast slow systems We finish this section with a discussion of a new direction of development in the Conley index theory. In Example 4.19 a Poincar6 section for an isolating neighborhood was described. Two points were asserted. The first was that the region described is an isolating neighborhood, and the second was that the index of the isolated invariant set is known. We shall now briefly mention the techniques used to obtain these results. The reader is referred to [8,58,32] for further details. The general framework is that of a family of differential equations on R " given by Ili
-
-
s0(
) +
+
i=1
where e ~> 0. For each s let ~0e:R x •" ~ IK" denote the flow generated by (1) with parameter value e. The reader can check that Examples 4.19 and 4.1.5 are of this form. In both cases for e - 0 there is no isolating neighborhood for the dynamics that is of interest for s > 0. These suggests the following definition. DEFINITION 4.27. A compact set N C R" is called a singular isolating neighborhood if N is not an isolating neighborhood for ~p0, but there is an ~ > 0 such that for all s 6 (0, ~], N is an isolating neighborhood for q)~. The first question that should be addressed is how can one verify that a compact set is a singular isolating neighborhood. The answer requires the following definitions. DEFINITION 4.28. The average of g on S, Ave(g, S), is the limit as T --+ cx~ of the set of numbers { T1 f J g(~oo(s, x)) ds I x ~ S}. g has strictly positive averages on S if Ave(g, S) C (o, ~ ) . DEFINITION 4.29. A point x E S is a C-slow exit point if there exists a compact set Kx C S invariant under (P0, a neighborhood U~ of TC(Kx), an ~ > 0 and a function g : cl(U~-) x [0, ~] --+ R such that the following conditions are satisfied.
(1) co(x, q)o) C Kx. (2) g is of the form g(z, e) = g0(z) + eel(z) + . . . + e mgm (z). (3) If L0 = {z I g0(z) = 0} then K~ n cl(U,-) = S N L0 A cl(U~) and furthermore
go[sncl(Ux) ~ O. (4) Let gj(z) = V=go(z) 9f j ( z ) + V=gl(z) 9f j - l (z) + " - + V=gj(z) 9fo(z). Then for some m, gj -- 0 if j < m, and gm has strictly positive averages on T~(Kx).
K. Mischaikow and M. Mrozek
446
A C-slow entrance point is a point which is a C-slow exit point in the backward flow. Given a compact set N C R n let S = Inv(N, ~00). Let S - (S +) denote the set of C-slow exit (entrance) points. Set S~ = S n 0 N and S f - S~ n S +. THEOREM 4.30. If S N ON C S +, then N is a singular isolating neighborhood. Following the standard assumption underlying the technique of singular perturbations, it is assumed that the dynamics of the "singular" system 2 = fo(x) is simpler to analyze than that of the perturbed system. Thus, the goal is to determine the Conley indices for isolated invariant sets for small e > 0 from the dynamics of ~P0. This motivates the following definition. DEFINITION 4.3 1. A pair of compact sets (N, L) with L C N is a singular index pair if cl(N \ L) is a singular isolating neighborhood, and there exists g > 0 such that for all e 9 (0, ~]
H.(N, L) ~" CH.(Inv(cl(N \ L), ~o~)). Again the crucial point is to obtain results which verify that a given pair is a singular index pair. The simplest approach is to mimic the three conditions in the definition of an index pair as closely as possible. With regard to the exit set requirement, it is clear that L will need to contain
N - "-- {x 9 ON I r
t), x) r N for all t > 0}.
Positive invariance leads to the following construction. Given Y C N its push forward set in N under the flow ~00 is defined to be
p(Y, N) := {x 9 N I 3z 9 Y, t ~> 0 such that ~00([0, t], z) C N, ~p0(t, z) -- x }. Observe that p(Y, N) consists of the set of points which can be reached from Y by a positive trajectory in N and that Y C p(Y, N). The unstable set of an invariant set Y C N under qg0 is
W~(Y) "- {x 9 N [ r
O),x) C N and or(x, r
C Y}.
Notice that Y C W~v(Y). It is easy to find examples of isolating neighborhoods N for which there does not exist a set L such that (N, L) is an index pair for Inv N. The following condition prevents this. A slow entrance point x is a strict slow entrance point if there exists a neighborhood Ox of x and an ~ > 0 such that if y 9 69x n N and e 9 (0, ~], then there exists ty(e) > 0 for which qg~([0, ty(e)], y) C N. Let S ++ denote the strict slow entrance points.
Conley index
447
THEOREM 4.32. Let N be a singular isolating neighborhood. Assume (1) S~ consists of C-slow exit points. (2) S a C S + + U S a. (3) (S ++ \ Sa-) A c l ( N - ) -- O. For each x ~ S~, let Kx denote a compact invariant set as in Definition 4.29. Define
L "--p(cl(N-), N, ~po)U W~( U ~(Kx)). x ~ S~
lf L is closed, then (N, L) is a singular index pair for the family of flows ~o~. Notice that all the computations used in the construction of L involve only the singular flow. The higher order terms in (1) are only used in determining which points are slow exit and slow entrance points.
4.6. References One of the pioneering applications of the Conley index is due to Conley and Smoller and involved the proof of the existence of shocks waves [11-14]. The proofs were based on arguments involving attractor-repeller pairs. For a more complete discussion on this topic see [76]. Since then there have been a large number of applications of these techniques to finding traveling waves [ 10,30,51,53,60] The idea of the connection matrix was due to Conley, but its existence was first established by Franzosa [25-28]. It has since been generalized to the setting of maps, first by Robbin and Salamon [71 ] and later by Richeson [69]. As was mentioned in the text transition matrices were first developed in the singular form [68,50]. The topological transition matrices were defined in [46]. A purely algebraic development of the transition matrix can be found in [29]. The results on the existence of periodic orbits and the long exact sequence relating the index of the Poincar6 map with that of the flow can be found in [48] The first characterization of symbolic dynamics in terms of the Conley index was given in [55]. Theorem 4.26 based on the spectrum of the Conley index was proved in [5]. The optimality of this result is shown in [6].
5. Multivalued dynamics 5.1. Multivalued maps The theorems in Section 4.4 characterizing chaos in terms of the Conley index cannot be applied directly to differential equations, because the automorphism part of the index is always the identity in this case. However, there is hope that they could be applied to a Poincar6 map if such a map exists. The problem is that in most concrete applications our knowledge of the Poincar6 map is based mostly on numerical experiments.
K. Mischaikow and M. Mrozek
448
The only way to obtain rigorous information from numerical computations is to perform rigorous error analysis by means of interval arithmetic. As an outcome one obtains a multivalued map: the exact values are not known but sets enclosing the exact values are computed rigorously. It turns out that the multivalued map may carry sufficient information to make rigorous claims about the dynamics of the differential equation. To keep things simple we will study only dynamics in compact subspaces of Euclidean space. Let X, Y C IRd be two such spaces. Formally, a multivalued (mv) map from X to Y is a map F : X ~ 79(Y), where 79(Y) stands for the family of all subsets of Y. To emphasize that we think of F as a generalization of a single valued map, we will write F : X Z Y to denote a m v map from X to Y. We will also consider mv maps of pairs. We say that F : (X, X0) ~ (Y, Y0) maps (X, X0) into (Y, Y0) if F : X ~ Y is a m v map such that F(X0) C Y0. We assume that all mv maps considered in this paper have non-empty compact values. For A C X we define the image of A under F by
F(A)'--U{F(x)Ix6A
t.
For B C Y we define the weak preimage of B under F by
F * - l ( B ) "-- {x ~ X I F(x) A B # 0} and the strong preimage by
F - l ( B ) "= {x ~ X I F ( x ) C B}. The inverse of a multivalued map F ' X ~ Y is a m v map F - I ' Y ~ X defined by F - l ( y ) "-- {x E X ly ~ F(x)}. We say that F is upper semicontinuous (usc) if F -1 (U) is open for any open U C Y. By a selector of F we mean a single-valued continuous map f " X --+ Y such that f (x) 6 F (x) for every x 6 X. Sometimes we will also consider mv selectors. A m v selector is a mv map G ' X ~ Y such that G(x) C F(x) for every x 6 X.
5.2. Representable multivalued maps The computer can handle only a finite amount of information. In particular all arithmetic operations in the computer are performed on a finite subset IR C R " - IR U {-cx~, co}. We will call R a representation of IR and the elements of ~ representable numbers. In concrete realizations of computer hardware the set R usually contains -cx~, 0, cx~ and a certain set of binary fractions. Since no non-trivial finite set is closed under arithmetic operations, rounding is used whenever the result of an operation is not in IR. To keep rigor in computations, instead of performing the usual rounding to the nearest representable number, the result may be stored as a pair of two representable numbers: a lower and an upper bound obtained via rounding down and rounding up, respectively. The process is known as interval computations or interval arithmetic and may be easily implemented
Conley index A
449 m
A
on most.., computers. We saAythat a representation R l C R is a refinement of I~ if for any x, y ~ R there exists a z e R i such that x < z < y. To work with multivalued maps on the cAomputer we need the class of representable sets and representable multivalued maps. An R-representable interval setAin R d is a Cartesian product of d intervals in R with endpoints in R. An elementary R-representable set is a representable interval set which cannot be decomposed as the union of two non-empty representable interval sets. An R-representable set is a finite union of elementary representable sets. A nice feature of the class of representable sets is that it is closed under the set-theoretic union, intersection and difference as well as under the operations of taking the interior or closure. This means that any finite combination of these operations on representable sets is algorithmizable. A m v map F ' X Z Y is R-representable if for every x e X the set F(x) is R-representable and F restricted to any elementary representable set is constant. The image and preimage of a representable set may be computed algorithmically as the following proposition shows. A
A
PROPOSITION 5.1. The image and preimage of an R-representable set in an Rrepresentable mv map is R-representable. A
In the sequel we will usually drop the prefix R when speaking about representable sets and numbers, although in applications it is usually necessary to work simultaneously with several re~esentations. When working with representable numbers usually it is sufficient to take as R the representation embedded in hardware, though sometimes it is necessary to implement via suitable software larger sets of representable numbers. On the other hand, when working with representable set and mv maps, one usually takes the set of representable numbers which is much smaller than representable numbers embedded in hardware. The reason is that representable sets and mv maps are stored as lists and then large IR results in very large lists.
5.3. Approximation and inheritance As we already mentioned, we would like to study the properties of ~ngle valued maps by enclosing them in multivalued maps. We say that F :X ~ Y is an R-representation of f " U --+ Y if U C X, F is R-representable and f is a selector of Flu. Assume that {IR, },,er~ is a given, monotonically incrAeasing sequence of representations of R such that R,,+l is a refinement of R,, and ~,,cr~ R,, is dense in R. A natural question is whether given a continuous map f : U --+ Y it is possible to find a sequence {F,, },,~r~ of R,,-representations of f such that F,, --+ f , i.e., for every x 6 X and for every e > 0 there exists an N 6 N such that n ~> N, y 6 F,, (x) ~
dist(y, f (x)) ~< e.
A positive answer to the above question gives the following simple theorem.
K. Mischaikow and M. Mrozek
450
THEOREM 5.2. If f : U --+ Y is L-Lipschitz continuous, then there exists a sequence { Fn }ncl~ : X :z~ Y of usc convex-valued representations of f such that Fn --+ f . The above theorem shows that, given a sufficiently powerful computer, any Lipschitz continuous map admits an arbitrarily close multivalued representation. In other words Lipschitz maps may be approximated by representable mv maps. However, this approximation has a feature which distinguishes it from classical approximations. In classical approximations there is no way to extract properties of the approximated function from just one or any finite number of approximating functions. In case of mv approximations it is sometimes possible because of a feature we call inheritance. To explain this simple idea assume ~4 is a collection of mv maps and qg(F) is a property of such maps. We say that q9 is inheritable if for every single-valued selector f of F in r (p(F) ~
qg(f).
We say that an inheritable property q9 is strongly inheritable if for any single valued map f ~ ,A such that qg(f) and for any sequence {Fn} C At satisfying Fn --+ f we have qg(Fn) for n sufficiently large. If or(F) is a term then we say that ot is inheritable (strongly inheritable) if for any x the property or(F) = x is inheritable (strongly inheritable). As an example consider the family A = {F : ~ ~ R}. Then the property
or(F) ~
3x ~ R F(x) > 0
is strongly inheritable. Replacing the strong inequality in the above example by a weak inequality we obtain a property which is inheritable but is not strongly inheritable. A simple example of a non-inheritable property is
y(F) ~
3x E R F(x) ~ O.
Most properties of interest are non-inheritable. However there are cases when one can convert inheritable properties into non-inheritable properties via suitable theorems. For instance a theorem, which converts properties like ot in the above example to property y, is the Darboux Theorem. Note that in case of single-valued maps property y reduces to the existence of a zero of a function. Thus representable mv maps together with the Darboux Theorem provide a way of verifying algorithmically the existence of a zero of a continuous function. In the sequel we will show that the Conley index may be used in a similar way. To do this we need to extend the Conley index to mv maps.
5.4. Conley index for multivalued maps We begin with a definition of a discrete multivalued dynamical system. DEFINITION 5.3. An usc mv map F : X x Z ~ X with compact values is called a discrete multivalued dynamical system (dmds) if the following conditions are satisfied:
Conley index
451
(i) For all x 6 X, F ( x , 0) = {x}; (ii) For all n, m 6 Z with nm >~0 and all x ~ X, F ( F ( x , n), m) = F(x, n + m); (iii) For all x, y 6 X, y 6 F (x, - 1 ) ~ x 6 F (y, 1). It is convenient to use the notation F 'z (x) := F ( x , n). The map F n coincides with the superposition of n copies of F l : X ~ X or its inverse (F1) -1 . This implies that the dmds F is uniquely determined by F l , the generator of the dmds F. For simplicity we will denote the generator also by F. Let F : X x Z Z X be a dmds and let N C X be a compact subset. Let A C Z. We say that cr :A --+ N is a solution to F in N through x if 0 6 A, o-(0) = x and o-(n + 1) F (~r (n)) for n, n + 1 6 A. Define the sets Inv(N, F) := {x E N I 3a :Z --+ N a solution to F in N through x}, Inv+(N, F) := {x 6 N I 3o-:Z + --+ N a solution to F in N through x}, I n v - ( N , F) := {x E N I3a : Z - --+ N a solution to F in N through x}. The set N is an isolating neighborhood for F if
BdiamNF(Inv N)
C int N,
where diamN F is the maximal diameter of the values of F in N. A pair P = (PI, P0) of compact subsets P0 C P1 C N is called an index pair for F in N if the following conditions are satisfied:
F(Pi)ANCPi,
i = 0 , 1,
F(P1 \Po) C N, Inv N C int(P1 \Po). Note that unlike the single valued case we defined here the index pair relative to an isolating neighborhood. This is because of some fundamental problems we encounter when trying to define the index map. The problems come from the fact that the homotopy and homology of multivalued maps are not obvious to define. Probably the most extensively studied is the homology and cohomology theory for multivalued maps [35,34]. In general some assumptions, usually quite restrictive, must be imposed on the mv maps to guarantee that the map in homology makes sense. In most cases the assumptions are satisfied in applications but are lost when we want to form an analogue of the index map (5). Therefore in the multivalued case it easier to construct the index directly on the homology level. A simple class of mv maps which do induce maps in homology consists of star-shaped maps. We say that F : X ~ Y is star-shaped if there exists a selector f : X --+ Y such that for any other selector g : X --+ Y and any x 6 X the segment joining f ( x ) and g(x) is contained in F (x). Notice that convex-valued maps which admit at least one selector are in particular star-shaped. In the sequel we assume that the generator F is star shaped. For a star-shaped mv map we define the map induced in homology by F, := f , : H , ( X ) ~ H , ( Y )
452
K. Mischaikow and M. Mrozek
where f :X --+ Y is an arbitrary selector of F. The definition is correct, because F admits at least one selector and evidently any two selectors are homotopic. If F : ( X , Xo) ~ (Y, Yo) is a star-shaped multivalued map of pairs, i.e., a mv map F :X ~ Y such that F(Xo) C Yo, then in a similar way we define the map
F, : H,(X, Xo) ~ H,(Y, Yo). The process of collapsing the exit set to a point may expel us from the class of starshaped maps. Therefore we have to define the index map differently. First we define regular index pairs. An index pair P for an isolating neighborhood N C X is called regular if f ( U \ P0) C P1 for some U D P0 open in Pl and
cl(F(Po)\P1) A c l ( P l \ P o ) = 0 . One can show that every isolated invariant set admits regular index pairs. We put
T(P) "-- TN, F(P) "-- (P1U ( X \ intN), Po U (X\ intN)). The following proposition follows from the excision property of the homology theory. PROPOSITION 5.4. If P is a regular index pair for N then (i) F(P) C TN, F ( P ) , (ii) The inclusion i p, T(p) : P --+ T(P) induces an isomorphism in homology. Actually, the regular index pair in the above proposition may be replaced by an arbitrary index pair if one uses Alexander-Spanier cohomology instead of homology. Consider the mv map Fp,T(p):P ~ x ---+ F(x) C T(P). The endomorphism le := H,(ip,T(p)) -1 o H,(Fp,T(p)) of H,(P) is called the index map associated with the index pair P. The following theorem lets us extend the Conley index to multivalued maps. THEOREM 5.5. Let S be an isolated invariant set. Then the Leray reduction of Ip : H,(P) --+ H,(P) is independent of the choice of an isolating neighborhood N of S for F and a regular index pair P for N. Now Con, (S, F), the homological Conley index of S is defined similarly to the single valued case as the Leray reduction of Ie : H, (P) --+ H, (P) for any regular index pair P in any isolating neighborhood N of S. As we will see in the sequel, the importance of the generalization of the Conley index to mv maps lies in the fact that the index is inheritable. More precisely we have the following theorem. THEOREM 5.6. The isolating neighborhood, the index pair, and the Conley index are strongly inheritable terms.
Conley index
453
5.5. Continuation As was indicated in the introduction and stated explicitly in Theorem 3.10 the Conley index continues, i.e., as long as the invariant set S remains isolated its Conley index does not change. The same is true in the mv case. To be more precise consider a compact interval A C It~ and F : A x X x Z=~ X
be an usc star shaped map such that, for each X 6 A, F;~ : X x Z Z X given by F;~ (x, n) := F (~., x, n) is a dmds. The first observation is the following easy to prove theorem. THEOREM 5.7. Let Xo c A and let N be an isolating neighborhood for F~o. Then N is an isolating neighborhood for F~ for all X sufficiently close to Xo. Another way of stating Theorem 5.7 is that isolating neighborhoods are stable with respect to small perturbations of generators. To prove the stability of the Conley index itself it would be nice to have stability of index pairs. However, as pointed out in [70], this is not true in general. Never the less, in some settings stable index pairs do exist, as the following theorem shows. THEOREM 5.8. Let f : X --+ X be a homeomorphism, N an isolating neighborhood for f and W an open neighborhood of Inv N. Then there exists an index pair P f o r N with PI \Po C W and an ~ > 0 such that if G : X ~ T)(X) is an usc proper map with the property G(x) C B ~ ( f ( x ) )
for all x E X,
then P also is an index pair for G. In particular P is an index pair for any small perturbation of f .
Observe that an immediate corollary of the above Theorem is the Continuation Property of the Conley index in the setting of homeomorphisms and flows.
5.6. Computability of the index Of course, in order to be able to compute the Conley index of a multivalued representation of a map we need to know how to construct index pairs. Actually, all what we need is to show that a representable mv map in a representable isolating neighborhood admits representable index pairs and find a formula for such an index pair. This is relatively easy for special isolating neighborhoods, namely isolating blocks. A compact set N C R J is an isolating block for F if Bdiamx F ( F *-l (N) N N n F ( N ) ) C intN.
454
K. Mischaikow and M. Mrozek
THEOREM 5.9. If F : X ::~ Y is usc representable and N is a representable isolating block f o r F, then N is an isolating neighborhood and (N,N\F-l(intN)) is an index pair in N consisting of representable sets. Hence, index pairs may be constructed algorithmically.
Unfortunately isolating blocks are much harder to find than isolating neighborhoods. To construct an index pair for an arbitrary isolating neighborhood N we need first the following theorem in which FN denotes the map FN : N g x --+ N A F(x) C N. THEOREM 5.10. If F and N are representable then there exist numbers p, q ~ N such that
Inv-(N, F) -- A F~ (N),
Inv + (N, F) -
i--O,p
A
FN-i(N).
i=O,q
In particular Inv- N, Inv + N and Inv N are representable.
For a given ~-representable set A C R d define the following two sets o~(A) := U {E I E is elementary representable a n d c l E A A # 0}, n~(A) "-- U {cl E I E is elementary representable andcl E N A :fi 0}.
One easily verifies that o~(A) C n~(A) are both neighborhoods of A. Moreover, one can check that they are both representable, therefore they are algorithmically computable. The following theorem shows how one can obtain an index pair from Inv-(N, F) and Inv + (N, F). THEOREM 5.1 1. Assume F : X ~ X is a representable usc multivalued map and N is a representable isolating neighborhood with respect to a representation ~ C IRd. Let ~1 be a refinement of II~. Put Pl " - n~, (Inv- N) N N, P0 "= P1 \o~, (Inv + N). Then P1, Po are A
representable with respect to IRl and P :-- (P1, P0) is an indexpairfor F in N.
Theorem 5.11 leads to the following algorithm constructing index pairs. ALGORITHM 5.12 function
begin A := N; B := N;
repeat A ' := A; B ' := B;
find_index_pair(N, F)
Conley index
455
,-1
A'---- FN(A); B :-- F N (B); until (A = A' and B -- B'); C := A • B ; r := diamN F;
if (B(C, r) C int N) then begin P1 := n ~ (A) fq N" P0 :-- Pl \o~j (B); return (Pt, P0); end else return "Failure"; end; THEOREM 5.13. If Algorithm 5.12 is called with N, a representable compact set and F, a representable multivalued dynamical system on input, then it always stops. If it does not output "Failure", then N is an isolating neighborhood for F and the algorithm outputs an index pair (PI, Po)for F in N. 5.7. References Representable multivalued maps as a tool for rigorous numerical computation of the Conley index appeared in [56,57]. The idea of inheritance comes from [63]. The Conley index for multivalued maps was constructed in [41 ] and the existence of stable index pairs was established in [42]. The algorithms for computing the Conley index were presented in [63] and [80].
6. Examples of computer assisted proofs The use of the computer to numerically approximate isolating neighborhoods and to compute the associated Conley indices represents yet another new direction in the Conley Index theory. The examples presented below are included to emphasize two points: first, it is feasible to employ the computer to obtain rigorous analysis of dynamical systems using the index theory; and two, this approach can be applied to a variety of different types of problems. 6.1. Lorenz equations Representable multivalued maps together with inheritable properties open the way to rigorous computations of the Conley index for concrete dynamical systems. Since there are various qualitative descriptions of dynamics in terms of the Conley index, many new interesting results may be obtained this way. As an example consider a result on chaotic dynamics in the Lorenz equations (see [59] and also [56,57]). The result is based on a generalization of the Conley index theory proposed by Szymczak [79].
456
K. Mischaikow and M. Mrozek
For a k • k matrix A = (Aij)
over
Z2
put
Z ( A ) "-- {or-Z --+ {1, 2 . . . . . k} I'v'i ~ Z Ao~(i)ot(i+l) -- 1 } a:r(A)
9or--+ ( Z 9 i)--+ ot(i + 1) ~ {1,2 . . . . . k} ~ E'(A).
Let n(10,28,8/3) = 6,
A(10,28,8/3)
n(10,54,45) = 4,
n(10,60,8/3)
=
0 0 0
1 0 0
1 0 0
0 1 0
0 1 0
0 0
1
0
0
0
0
0 0
1 0
1 0
0 1
0 1
0 0 0
=
A(lO,6O,8/3) =
I
1
o0 o, 0 0 o 11 1
1
0
0
0
0
1
0
'
'
A(10,54,45)
=
01 I 1 0
1
1
0
0
1
"
We have the following theorem THEOREM 6.1. Consider the Lorenz equations k -- s(y - x), -- R x - y - x z ,
(25)
= xy-qz, and the plane P := {(x, y, z) I z = R - 1 }. For all parameter values in a sufficiently small neighborhood o f (a, R, b) there exists a Poincard section N C P such that the associated Poincard map f is Lipschitz and well defined. Furthermore, there is a continuous map p : Inv(N, f ) ~ Hn(~.R.b) such that po f = a op
and p(Inv(N, f ) D Z(A(a,R,b)). Moreover, f o r each periodic u E Z ( A ) there exists an x ~ Inv(N, f ) on a periodic trajectory o f the same minimal period such that p ( x ) = t~.
An outline of the algorithm which proves the above theorem is as follows: (1) Choose a candidate for a representable isolating neighborhood N for the Poincar6 (2) (3) (4) (5)
map f . Compute a m v representation F of f . Check if N is an isolating neighborhood for F. If no, find a better mv representation of f and go back to 3. If yes, compute the index pair and find the Conley index.
Conley index
457
(6) By inheritance, f has the same Conley index in N. (7) If the computed index satisfies the assumption of the chaos criterion, proclaim SUCCESS, otherwise, proclaim FAILURE.
6.2. The Hdnon map Recall that the H6non map is given by the formula f (x, y ) -
(1 - a x 2 + y, bx).
A. Szymczak gave a computer assisted proof of the following result. THEOREM 6.2. For a -- 1.4 and b principal periods except for 3 and 5.
0.3 the Hdnon map admits periodic orbits of all
The proof is based on rigorous numerical computation of the Conley index.
6.3. Kuramoto-Sivashinsky equations Consider the following system of ordinary differential equations with parameter )v. X'0
m
Xl,
X'I
--
X2,
(26)
-) x(~
x2 -- -1.Xl - T + 1. One easily verifies that the equation has exactly two stationary points: x - : = ( - v ~ , 0, 0), x + "-- (v/2, 0, 0). An interesting question is if the equation admits a solution x (t) such that lim x(t) - x - ,
t---+ - - O G
lim x(t) = x +.
t ---->(X),
(27)
In case of )~ = 1 Equation (26) is the ODE derived from the Kuramoto-Sivashinsky PDE and studied numerically by several authors. It is shown in [82] that for )v = 1 Equation (26) admits heteroclinic connections. In case of )v - 0 the equation becomes a variant of an equation studied by Conley [7], who shows that it also admits a heteroclinic connection. It turns out that combining the technique of Conley and some ideas of Troy with a computer assisted proof that certain sets are isolating neighborhoods one can show that (26) admits a heteroclinic connection for every )~ 6 [0, 1]. In other words the following generalization of the results of Troy and Conley may be proven. THEOREM 6.3. For every ;Z E [0, 1] there exists a solution xz(t) of Equation (26) such that (27) is satisfied.
K. Mischaikow and M. Mrozek
458
6.4.
References
The computer assisted proof of chaos in the Lorenz equations for various parameter values was presented in [56,57,59]. Rigorous numerical verification of Theorem 6.3 was presented in [65] and of Theorem 6.2 in [80].
References [1] A. Baker, Topological entropy and the first homological Conley index map, Preprint (1998). [2] V. Benci, A new approach to the Morse-Conley theory and some applications, Ann. Mat. Pura. Appl. 4 (1991), 231-305. [31 V. Benci and M. Degiovanni, Morse-Conley theory (in preparation). [4] R. Bott and L.W. Tu, Differential Forms in Algebraic Topology, Springer, Berlin (1982). [5] M. Carbinatto, J. Kwapisz and K. Mischaikow, Horseshoes and the Conley index spectrum, Ergodic Theory Dynamical Systems (to appear). [6] M. Carbinatto and K. Mischaikow, Horseshoes and the Conley index spectrum II: the theorem is sharp, Dis. Cont. Dynamical Systems 5 (1999), 599-616. [7] C. Conley, Isolated lnvariant Sets and the Morse Index, CBMS Lecture Notes, Vol. 38, Amer. Math. Soc. Providence, RI (1978). [81 C. Conley, A qualitative singular perturbation theorem, Global Theory of Dynamical Systems, Z. Nitecki and C. Robinson, eds, Lecture Notes in Math., Vol. 819, Springer, Berlin (1980), 65-89. [91 C. Conley and R. Easton, Isolated invariant sets and isolating blocks, Trans. Amer. Math. Soc. 158 (1971), 35-61. [10] C.C. Conley and R. Gardner, An application of the generalized Morse index to travelling wave solutions of a competitive reaction diffusion model, Indiana Univ. Math. J. 33 (1989), 319-343. [11] C. Conley and J. Smoller, Viscosity matrices for two dimensional nonlinear hyperbolic systems, Comm. Pure Appl. Math. 23 (1970), 867-884. [12] C. Conley and J. Smoller, Viscosity matrices for two dimensional nonlinear hyperbolic systems, H, Amer. J. Math. 94 (1972), 631-650. [131 C. Conley and J. Smoller, On the structure ofmagnetohydrodynamic shock waves, Comm. Pure Appl. Math. 27 (1974), 367-375. [141 C. Conley and J. Smoller, On the structure of magnetohydrodynamic shock waves, II, J. Math. Pures Appl. 54 (1975), 429-444. [15] C. Conley and E. Zehnder, The Birkhoff-Lewis fixed point theorem and a conjecture of V.L Arnold, Invent. Math. 73 (1983), 33-49. [16] C. Conley and E. Zehnder, Morse type index theory for flows and periodic solutions for Hamiltonian systems, Comm. Pure Appl. Math. 37 (1984), 207-253. [17] B. Fiedler and K. Mischaikow, Dynamics of bifurcations for variational problems with 0(3) equivariance: A Conley index approach, Arch. Rat. Mech. Anal. 119 (1992), 145-196. [18] A. Floer, A refinement of the Conley index and an application to the stability of hyperbolic invariant sets, Ergodic Theory Dynamical Systems 7 (1987), 93-103. [19] A. Floer, Morse theory for Lagrangian intersections, J. Differential Geom. 28 (1988), 93-103. [20] A. Floer, A relative Morse index for the symplectic action, Comm. Pure Appl. Math. 41 (1988), 393-407. [21] A. Floer, The unregularized gradient flow of the symplectic action, Comm. Pure Appl. Math. 41 (1988), 775-813. [22] A. Floer, Wittens complex and infinite dimensional Morse theory, J. Differential Geom. 28 (1988), 93-103. [23] A. Floer, Symplectic fixed points and holomorphic spheres, Comm. Math. Phys. 120 (1989), 575-611. [24] J. Franks and D. Richeson, Shift equivalence and the Conley index, Preprint. [25] R. Franzosa, Index filtrations and the homology index braid for partially ordered Morse decompositions, Trans. Amer. Math. Soc. 298 (1986), 193-213.
Conley index
459
[26] R. Franzosa, The connection matrix theory for Morse decompositions, Trans. Amer. Math. Soc. 311 (1989), 561-592. [27] R. Franzosa, The continuation theory for Morse decompositions and connection matrices, Trans. Amer. Math. Soc. 310 (1988), 781-803. [28] R. Franzosa and K. Mischaikow, The connection matrix theory, for semiflows on (not necessarily locally compact) metric spaces, J. Differential Equations 71 (1988), 270-287. [29] R. Franzosa and K. Mischaikow, Algebraic transition matrices in the Conley index theory, Trans. Amer. Math. Soc. 350 (1998), 889-912. [30] R. Gardner, Existence of travelling wave solution of predator-prey systems via the Conley index, SIAM J. Appl. Math. 44 (1984), 56-76. [31] T. Gedeon, Cyclic Feedback Systems, Mem. Amer. Math. Soc., No. 637 (1998). [32] T. Gedeon, H. Kokubu, K. Mischaikow, H. Oka and J. Reineck, The Conlev index for fast-slow systems I." One-dimensional slow variable, J. Dynamics Differential Equations (to appear). [33] T. Gedeon and K. Mischaikow, Global dynamics of cvclic feedback systems, J. Dynamics Differential Equations 7 (1995), 141-190. [34] A. Granas and L. G6rniewicz, Some general theorems in coincidence theory, J. Math. Pure Appl. 60 (1981), 661-373. [35] L. G6rniewicz, Homological methods in fixed point theory of multi-valued maps, Dissertationes Math. Vol. 129, PWN, Warszawa (1976). [36] J.K. Hale, Asymptotic Behavior of Dissipative Systems, Math. Surveys, Vol. 25, Amer. Math. Soc., Providence, RI (1988). [37] J.K. Hale, L.T. Magalhhes and W.M. Oliva, An Introduction to Infinite Dimensional Dynamical SystemsGeometric Theory, Appl. Math. Sci., Vol. 47, Springer, Berlin (1984). [38] H. Hofer and E. Zehnder, Symplectic Invariants and Hamiltonian Dynamics, Birkh~iuser, Boston, MA (1994). [39] M. Hurley, Chain recurrence and attraction in noncompact spaces, Ergodic Theory Dynamical Systems 11, 709-729. [40] M. Hurley, Chain recurrence and attraction in noncompact spaces, H, Proc. Amer. Math. Soc. 115, 11391148. [41] T. Kaczyfiski and M. Mrozek, Conlev index for discrete multivalued dynamical systems, Topology Appl. 65 (1995), 83-96. [42] T. Kaczyfiski and M. Mrozek, Stable index pairs for discrete dynamical systems, Canad. Math. Bull. 40 (1997), 448-455. [43] H. Kokubu, K. Mischaikow, Y. Nishiura, H. Oka and T. Takaishi, Connecting orbit structure of monotone solutions in the shadow system, J. Differential Equations 140 (1997), 309-364. [44] H. Kokubu, K. Mischaikow and H. Oka, Existence of infinitely many connecting orbits in a singularly perturbed ordinary differential equation, Nonlinearity 9 (1996), 1263-1280. [45] C. McCord, The connection map for attractor-repeller pairs, Trans. Amer. Math. Soc. 307 (1988), 195-203. [46] C. McCord and K. Mischaikow, Connected simple systems, transition matrices, and heteroclinic bifurcations, Trans. Amer. Math. Soc. 333 (1992), 379-422. [47] C. McCord and K. Mischaikow, On the global dynamics of attractors for scalar delay equations, J. Amer. Math. Soc. 9 (1996), 1095-1133. [48] C. McCord, K. Mischaikow and M. Mrozek, Zeta functions, periodic trajectories, and the Conlev index, J. Differential Equations 121 (1995), 258-292. [49] J. Milnor and J.D. Stasheff, Characteristic Classes, Princeton Univ. Press, Princeton, NJ (1974). [50] K. Mischaikow, Transition systems, Proc. Roy. Soc. Edinburgh Sect. A 112 (1989), 155-175. [51] K. Mischaikow, Travelling waves for cooperative and competitive-cooperative systems, Viscous Profiles and Numerical Methods for Shock Waves, M. Shearer, ed., SIAM, Philadelphia (1991), 125-141. [52] K. Mischaikow, Global asymptotic dynamics of gradient-like bistable equations, SIAM Math. Anal. 26 (1995), 1199-1224. [53] K. Mischaikow and V. Hutson, Travelling waves for mutualist species, SIAM Math. Anal. 24 (1993), 9871008. [54] K. Mischaikow and Y. Morita, Dynamics on the global attractor of a gradient flow arising in the GinzburgLandau equation, Japan J. Indust. Appl. Math. 11 (1994), 185-202.
460
K. Mischaikow and M. Mrozek
[55] K. Mischaikow and M. Mrozek, Isolating neighborhoods and Chaos, Japan. J. Indust. Appl. Math. 12 (1995), 205-236. [56] K. Mischaikow and M. Mrozek, Chaos in Lorenz equations: a computer assisted proof, Bull. Amer. Math. Soc. (N.S.) 33 (1995), 66-72. [57] K. Mischaikow and M. Mrozek, Chaos in Lorenz equations: a computer assisted proof Part H: details, Math. Comp. 67 (1998), 1023-1046. [58] K. Mischaikow, M. Mrozek and J. Reineck, Singular index pairs, J. Dynamics Differential Equations 11 (1999), 399-426. [59] K. Mischaikow, M. Mrozek and A. Szymczak, Chaos in Lorenz equations: a computer assisted proof Part IlL" the classic case, J. Differential Equations (to appear). [60] K. Mischaikow and J. Reineck, Travelling waves for a predator-prey system, SIAM Math. Anal. 24 (1993), 1179-1214. [61 ] M. Mrozek, Index pairs and the fixed point index for semidynamical systems with discrete time, Fund. Math. 133 (1989), 177-192. [62] M. Mrozek, Leray functor and the cohomological Conley index for discrete dynamical systems, Trans. Amer. Math. Soc. 318 (1990), 149-178. [63] M. Mrozek, Topological invariants, multivalued maps and computer assisted proofs in dynamics, Comput. Math. 32 (1996), 83-104. [64] M. Mrozek, An algorithmic approach to the Conley index theory, J. Dynamics Differential Equations 11 (1999), 711-734. [65] M. Mrozek, M. Zelawski, Heteroclinic connections in the Kuramoto-Sivashinsky equation, Reliable Computing 3 (1997), 277-285. [66] D. McDuff and D. Salamon, Introduction to Symplectic Topology, Oxford Science Publ. (1994). [67] M. Po2niak, Lusternik-Schnirelmann category ofan isolated invariant set, Univ. Jag. Acta Math. 31 (1994), 129-139. [68] J. Reineck, Connecting orbits in one-parameter families offlows, Ergodic Theory Dynamical Systems 8* (1988), 359-374. [69] D. Richeson, Connection matrix pairs for the discrete Conley index, Preprint (1997). [70] J.W. Robbin and D. Salamon, Dynamical systems, shape theory and the Conley index, Ergodic Theory Dynamical Systems 8* (1988), 375-393. [71] J.W. Robbin and D. Salamon, Lyapunov maps, simplicial complexes and the Stone functor, Ergodic Theory Dynamics Systems 12 (1992), 153-183. [72] C. Robinson, Stability theorems and hyperbolicity in dynamical systems, Rocky Mountain J. Math. 7, 425437. [73] C. Robinson, Dynamical Systems: Stability, Symbolic Dynamics, and Chaos, CRC Press, Boca Raton, FL (1995). [74] K.P. Rybakowski, The Homotopy Index and Partial Differential Equations, Universitext, Springer, Berlin (1987). [75] D. Salamon, Connected simple systems and the Conley index of isolated invariant sets, Trans. Amer. Math. Soc. 291 (1985), 1-41. [76] J. Smoller, Shock Waves and Reaction Diffusion Equations, Springer, New York (1980). [77] E.H. Spanier, Algebraic Topology, McGraw-Hill, New York (1966), Springer, Berlin (1982). [78] A. Szymczak, The Conley index for discrete dynamical systems, Topology Appl. 66 (1995), 215-240. [79] A. Szymczak, The Conley index for decompositions of isolated invariant sets, Fund. Math. 148 (1995), 71-90. [80] A. Szymczak, A combinatorial procedure for finding isolating neighborhoods and index pairs, Proc. Roy. Soc. Edinburgh Sect. A 127 (1997). [81] R. Temam, Infinite Dimensional Dynamical Systems in Mechanics and Physics, Springer, New York (1988). [82] W.C. Troy, The existence of steady state solutions of the Kuramoto-Shivashinsky equation, J. Differential Equations 82 (1989), 269-313.
CHAPTER
10
Functional Differential Equations Roger D. Nussbaum* Department of Mathematics, Hill Center, Rutgers University, 110 Frelinghuysen Road, Piscataway, NJ 08854-8019, USA
Contents 1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2. The initial value problem for FDEs: existence and uniqueness theorems . . . . . . . . . . . . . . . . . . 3. Linear autonomous FDEs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4. Locating zeros of characteristic equations: some examples . . . . . . . . . . . . . . . . . . . . . . . . . 5. The fixed point index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6. Periodic solutions of functional differential equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
*Partially supported by N S F D M S 97-06891. H A N D B O O K OF D Y N A M I C A L SYSTEMS, VOL. 2 Edited by B. Fiedler 9 2002 Elsevier Science B.V. All rights reserved 461
463 464 468 470 484 489 496
This Page Intentionally Left Blank
Functional differential equations
463
1. Introduction
Roughly speaking, a functional differential equation, or FDE, is a differential equation for which x'(t) depends not only on x(t) but also on the "past history" of the function s --+ x (s) for s ~< t. A precise formulation will be given later. Deceptively simple-looking examples are provided by
x ' ( t ) - - f ( x ( t ) , x ( t - 1)) and x'(t) - g ( x ( t ) , x ( t - 1), x(t - y)), where f and g are given functions and y > 0. Sometimes such equations are called differential-delay equations. Examples of functional differential equations can be traced back two hundred years. A 1911 article by Schmitt [70] lists a variety of early work on linear functional differential equations. However, both the systematic development of the theory of FDEs and the study of nonlinear FDEs are essentially twentieth century phenomena. The past forty years especially have seen an increasing flow of articles on the subject; and in recent years a number of books on FDEs have appeared. The interested reader should certainly consult Introduction to Functional Differential Equations by Hale and VerduynLunel [ 19] (an updating and extension of Hale's classic text [20]) and Delay Equations by Diekmann et al. [9]. The first of these books has a dense bibliography of twenty-five pages while the second has a bibliography of fifteen pages. An intriguing feature of the global study of nonlinear FDEs is that progress in understanding even the simplest-looking FDEs has been slow and has involved a combination of careful analysis of the equation and heavy machinery from functional analysis and algebraic topology. A partial list of tools which have been employed includes fixed point theory and the fixed point index (see [3,4,17,61-64]), global bifurcation theorems (see [40,53]), a global Hopf bifurcation theorem (see [7,55]), the Fuller index (see [7,12,13,15]), ideas related to the Conley index (see [ 14,39,50,69]), and equivariant degree theory. Nevertheless, even for the so-called Wright's equation,
x'(t) = - o t x ( t -
1)(1 + x(t)),
which has been an object of serious study for more than forty-five years, many questions remain open. It will be clear from the previous remarks that the title of this article is hopelessly immodest. A reasonably complete survey of the field of FDEs would require a large book. The goal here is much more limited. I shall first recall some of the basic theory of FDEs, particularly existence and uniqueness theorems for initial value problems and elementary linear theory. Then I shall describe the fixed point index, a tool from algebraic topology which has proved useful in studying nonlinear FDEs, and I shall sketch how the fixed point index can be applied to some equations to prove the existence of so-called "slowly oscillating periodic solutions". I shall also mention some open problems. My hope is that the reader will be encouraged by this introduction to explore further in the literature.
464
R.D. Nussbaum
2. The initial value problem for FDEs: existence and uniqueness theorems The proper abstract framework for the study of an FDE may well depend on the equation in question. However, the following framework is frequently useful. Given R > 0, let X = C ( [ - R , 0], R n) denote the Banach space of continuous maps x : [ - R , 0] --+ N n. As usual, i l l . I denotes a given norm on R n and x e X, we define the norm on X by Ilxll = sup{Ix(t)l: t e [ - R , 0]}. If M > 0 and y : [ - R , M ) --+ IRn is a continuous map, we shall follow standard notation (see [9,19]) and define for each t with 0 ~< t < M a function Yt E X by yt(s) = y ( t + s) for - R ~< s ~< 0. Now suppose that to < T are real numbers, that D is a closed subset of [to, T) x X and that f : D --+ IRn is a continuous map. Given 0 e X such that (to, 0) e D and T > to, one can ask whether there exists a continuous map x : [to - R, T] ~ R n such that (t, xt) e D for to ~< t ~< T and x ' ( t ) = f ( t , xt)
forto~ 0 such that [Ixt - 0 [I < M + eo for all t with to d. The reader should keep in mind that there are important examples which may not have this property. Typically, the characteristic equation of a linear neutral functional differential equation does not have this property, as one can see by considering the neutral FDE x'(t)-
1)--~x(t-
kx'(t-
1)
and its associated characteristic equation z-kze
-~ - - ~ e - : .
Another intriguing class of examples arises in work in progress by J. Mallet-Paret and S. Verduyn-Lunel. Mallet-Paret and Verduyn-Lunel consider x' (t) = a x ( t ) + b x ( t - 1) + c x ( t + 1),
and the associated characteristic equation z-a+be--+ce:.
In view of the central role played by Rouch6's theorem in the analysis of characteristic equations, we begin by stating Rouch6's theorem in a general form. Typically, the theorem is stated less generally in complex variables textbooks, but the usual proofs yield the version given below. THEOREM 4.1. Let G C C be a bounded, open set whose boundary OG comprises a finite number o f simple, closed, rectifiable Jordan curves which are given the standard positive orientation. I f H is an open neighborhood o f G and f " H --+ C is an analytic function such that f (z) =/=0 f o r all z E OG, then f has a finite number n o f zeros in G (counting multiplicity) and n =
~i
a
f(z)
dz " - deg(f, G, 0).
I f F" H x [0, 1] ~ C is a continuous map such that Ft(z) "-- F ( z , t) =/=Of o r all (z, t) E OG x [0, 1] and z --+ Ft(z) is analytic on H f o r 0 0 such that Ft,n(Z) ~: 0 for all z 9 Gn with IRe(z)l /> R. L e m m a 4.3 implies that Ft,n(Z) # 0 for z 9 O(Gn,R) and 0 ~< t ~< 1. Because Gn,R is bounded, T h e o r e m 4.1 is applicable and implies that f~ (z) and f~,, (z) have the same number of zeros in Gn,R. By L e m m a s 4.3 and 4.2, f~,, has exactly one zero in G,, and that zero has multiplicity one. Therefore, T h e o r e m 4.1 implies that f~ (z) has precisely one zero (counting multiplicity) in G,~. The same argument shows that f~ (z) = 0 has precisely two (counting multiplicity) solutions in Go. Using L e m m a s 4.1 and 4.2, one sees that these solutions are distinct for /~ ~ 1/e and that z = - 1 is a double root for/~ = 1/e. For/~ > l / e , the solutions are not real and hence are complex conjugates z0(/~) and z0(/~), with Im(z0(/~)) > 0. For each n ~> l, let zn(/~) denote the unique solution z 9 Gn of f ~ ( z ) = 0. The corresponding solution z-n(/~) 9 G - n is given by z-,,(/~) = z,,(/~). Using L e m m a 4.2, f ~ ( z ) - - 0 implies that f ~ ( z ) # 0, u n l e s s / ~ - 1/e and z - - l , so the implicit function theorem implies that for n ~> 1 and/~ > 0, the map/~ ~ zn (/~) is C ~ and for n = 0 and /~ > 1/e, the map/~ --+ z0(/~) is C ~ . Furthermore, writing z(/~) = Zn (/~), the implicit function theorem gives
z'(r
=
z(~) + Iz(r /311 + z(/3)l 2 "
It follows from this equation that if z(fl) = iv is pure imaginary, then Re(z'(fl)) > 0 and there exist 0 < fl, < fl < fl* with Re(z(fl,)) < 0 and Re(z(fl*)) > 0. If f~ (iv) = 0 for v 9 ]I{ and fl > 0, one easily checks that cos(v) = 0 and v = fl sin(v). If iv 9 Gn, where n is a positive integer, one concludes that v = 2nrr + re/2 = fin and
Functional differential equations
475
fl = fin. Similarly, if iv E Go, one concludes that v = -+-zr/2 and fl = re/2 = 130. Our previous remarks imply that there exists e = en > 0 such that Re(zn (/3,, -Jr-en)) > 0 and Re(zn(fin - en)) < 0 for n >~ 0. If n >~ 0 and there exists 13 > fin with Re(zn(fl)) ~ O, then Re(zn (fl)) < 0. By continuity of the map 9 / ~ Re(z,7(9/)) for 9/ E [/3, + e,,, fl], there must exist 9/ E [/3,, + en, fl] with Re(zn (9/)) = 0, which implies that 9 / = fi,7 and gives a contradiction. A similar argument shows that for n ~> 1, Re(zn(fi)) < 0 for 0 < 13 < fin. If n = 0, L e m m a 4.1 implies that f ~ ( z ) has two (counting multiplicity) negative real roots in Go for 0 < 13 ~< 1/e. Our previous argument shows that f ~ ( z ) = 0 has two roots in Go for /~ > 0, so f~ has only real roots in Go for 0 0 and n a positive integer, Equation (9) has no solution z with (2n - 1)Jr ~< Im(z) ~ 1, the solution z,(/3) in Theorem 4.2 satisfies 2nrr < Im(zn (/3)) < (2n + 1)rr. REMARK 4.2. The proof of T h e o r e m 4.2 depends on L e m m a 4.3, and L e m m a 4.3 is almost a direct proof of T h e o r e m 4.2 in the case 13 :--/~,, := 2nTr + 7r/2, n >~ 0. One can ask whether a different argument, more in the spirit of Rouch6's theorem, can be given; and in fact, there is such an argument. Let n be a nonnegative integer. By using T h e o r e m 4.1 and the homotopy z + [(1 - t)/~0 + t/~l] e - : = 0, one can prove that (assuming/~0/31 > 0) z +/~0 e - : = 0 and z +/~l e - : have the same number of solutions in G,z. As usual, one must work on G,,.R = {z E Gn ]IRe(z)[ < R} for R sufficiently large. Simple estimates comparing the size of Izl and I/~ e - : l for z E G , and Re(z) ~< 0 show that there is a number y, > 0 such that z + 13 e - : r 0 for all z E Gn with Re(z) ~< 0 and all/3 > y,,. It is also true that z +/~ e -~ --/-0 for all z with Ira(z) = 2nTr and 13 > ?',7. Define F, = {z E Gn I Re(z) > 0 and 2nTr < Im(z) < (2n + 1)Tr }. The above remarks show that in order to prove z + 13 e -~ = 0 has precisely one zero in Gn for n ~> 1 and 13 > 0 and precisely two zeros in Go for 13 > 0, it suffices to prove that for n ~> 0 and all sufficiently large/~ > 9/,, z + / ~ e -~ = 0 has precisely one solution in F,,. To prove the latter statement, define 0,7 = 2nzr + (37r/4), and for 13 > 9/,, and 0 Y,, such that Ft (z) =/=0 for z E 0 F,,, 0 fl,7. The delicate part of the argument is to show that Ft(iv) ~ 0 for 2nzr ~< v ~< (2n + 1)7r. Using the homotopy and T h e o r e m 4.1, one concludes that for /~ > fl,, z + 13 e -~ = 0 has precisely one solution in F,,. The case fl < 0 can be handled by similar arguments and yields the following theorem. Details are left to the reader. THEOREM 4.3. For each ~ < 0 and each integer n, the equation 0 = f ~ ( z ) := z + / ~ e x p ( - z ) has (counting multiplicity) exactly one solution z : z,,(~) E G,, = {z E C, I
R.D. Nussbaum
476
(2n - 1)7r < Im(z) < (2n + 1)Tr}. For n = O, zo(~) is a positive real number. The map ~ Zn(~), ~ "< O, is C ~ for all n 9 Z. For n ~ 1 and ~ < O, there exists z 9 Gn with f~(z) = 0 a n d R e ( z ) > 0 if andonly if ~ < -(2nTr - re/2).
Notice that Theorems 4.2 and 4.3 immediately imply that Re(z) < 0 for every solution z of Equation (9) if and only if 0 < 13 < rr/2. One hardly need say that the results of Theorems 4.2 and 4.3 are not new. Equation (9) was already exhaustively analyzed by L6meray [35] in 1897; see, also, Wright's classic article [74]. There may, however, be some novelty in the approach given here. The great advantage of Rouch6's theorem is that homotopy arguments can be used to obtain information about complicated equations from simple equations. The next theorem illustrates this point by deriving information about Equation (10) from Equation (9). Of course one can also observe that z is a solution of Equation (10) if and only if w := z + ot is a solution of w + (/3 e ~) e -w = 0, so results from Theorems 4.2 and 4.3 (with/3 replaced by/3 e ~) give corresponding results for Theorem 4.4 below. THEOREM 4.4. Assume that ot 9 R, ~ > 0 and z 9 C and define g(z; ~, ~) := z + ot + /3 e x p ( - z ) . The equation g(z; or, ~) -- 0 has a real root if and only ifO exp(-ot - 1), these solutions can be written zo(ot, ~) 9 Go and zo(ot, ~), with Im(z0(ot,/3)) > 0. The map (or, ~) --+ zo(ot, 13) is C ~ f o r / 3 > exp(-ot - 1). If ot ~ ~, Equation (10) has no solution z with Re(z) ~> 0. If or e x p ( - o t - 1). If ot >~ /3 and g(z'c~,/3) = 0 for z = # + i v , with Re(z) = # >~ 0, one obtains Re(g(z" or, 13)) -- # + ot + / 3 e - u cos v. This gives lz + o r = l# + ~ l -
I/3e - " c o s v l - / 3 e - ~ l
cosvl ~ / 3 .
If ot > / 3 or # > O, we obtain a contradiction, so the only possibility is ot - / 3 , / z cos v - - 1 and sin v - O. Using sin v - 0 one finds that
- 0 and
I m ( g ( z ; ot, fl)) -- v - - O , so z = 0, which contradicts g(0; or,/3) = ot + I3 > 0. If/3 6 IR, one can check that/3 ~< exp(/3 - 1), with equality if and only if/3 = 1. If ot ~< - / 3 , it follows that/3 0} and H,~- = {z ~ G,, IRe(z) < 0}"' and for R > 0 define H n+, R -- {z E H, + I IRe(z)l ~< R}, with a similar formula for H,~.R. For n ~ 0 and z E H +,,,R and ot ~< - / 3 , consider the h o m o t o p y
~ t ( z ) = g(z" ot, ( 1 - t)fl). The reader can verify that q~t(z) ~ 0 for all z ~ 0(14,+). F u r t h e r m o r e there exists R -Rn > 0 such that ~ t ( z ) =/=0 f o r 0 ~< t ~< 1 and for all t c H, + with Re(z) ~> R. T h e o r e m 4.1 implies that g(z; or,/3) = 0 has the same n u m b e r of solutions i n / 4 , + as z + ot - 0. Thus g(z; or, fl) -- 0 has no solution in the closure o f / 4 , + for n :/= 0. D One is also interested in determining w h e n the solution z,, (or, fl) 6 G,,, n ~ 0, satisfies Re(z,,(c~,/3)) > 0. With the aid of T h e o r e m 4.4, this question can be answered with the same kind of reasoning used in T h e o r e m 4.2. THEOREM 4.5. A s s u m e that ot c ~, fl > 0 and z ~ C and define g(z; or, fl) = z + ot + /3 e x p ( - z ) . For each nonzero integer n and real n u m b e r ot there is a unique positive real = ~,7(ot) such that Equation (10) has a pure imaginary root z -- iv ~ G,,. l f n >~ 1 and v -- v,~ (o~) is the unique real n u m b e r with 2nTr < v < (2n + 1)Tr such that v cos(v)
sin(v)
-- -c~,
(16)
then fl,,(ot) = fl-,z(~) -- v,,(ot)/sin(v,l(ot)). For fl > 0 and n ~ O, the equation g(z; c~, fl) = 0 has a unique solution zn(ot, fl) ~ G,,, and Re(z,,(ot, 13)) > 0 if and only if fl > fl,,(ot). I f - 1 < or, there is a unique real n u m b e r v -- vo(ot) ~ (0, re) which satisfies Equation (16). I f - 1 < ~ and fl >/30(or) : = vo(ot)/sin(vo(ot)), Equation (10) has two
R.D. Nussbaum
478
(counting multiplicity) roots zo(u, fl) E Go and zo(u, fl) E Go, and Re(z0(u, fl)) > 0 and Im(z0(u,/3)) > 0. IfO 0. I f - 1 < u < 0 and 0 < fl < - u , Equation (10) has precisely one solution z E Go with Re(z) > 0, and this solution is real. I f u - u , Equation (10) has (counting multiplicity) two solutions z E Go with Re(z) > 0; and if u 0 if and only if /3 > fin(u) is essentially the same as in Theorem 4.2 and is left to the reader. The point is to show that iv 6 Gn is a solution of Equation (10) if and only if v = v,7 (u) and/3 = fin(u). We restrict attention to n = 0 and let H~-, H o , H +0,R and H0~R be as in the proof of Theorem 4.4. By using Theorem 4.4 for any fixed u 6 R and/3 > 0 we see that there are precisely two root of Equation (10), z+ (u,/3) and z_(u,/3), in Go. These roots are real for 0 < fl < e x p ( - u - 1) and z - ( u , / 3 ) < z+(u,/3). At/3 = e x p ( - u - 1) these roots coalesce into a double real root; and for/3 > e x p ( - u - 1), the roots become a complex conjugate pair with z_(u, fl) = z+(u,/3) and Im(z+ (u, /3)) > 0. By using Theorems 4.1 and 4.4 one can prove that the map (u, fl) -+ z+ (u,/3), u 6 R,/3 > 0, is continuous. The problem is to translate this simple picture into the statement of the theorem. First, assume that u > - 1 and /31 >/30(u). The reader can verify that there exists /32 >/31 such that 1[32e x p ( - z ) l > Izl + I~1
for all z ~ closure ( n o ) .
It follows that for all fl ~> fie, Equation (10) has no solution in H o . Select R > 0 so that Equation (10) has no solution z ~ Go for IRe(z)l ~> R and for/31 ~ - 1 and/3 :=/31 >/30(u), Equation (10) has (counting multiplicities) precisely two solutions in H +. If u ~> 0, these solutions are clearly not real. In general, if - 1 < u, the reader can verify a calculus lemma, namely, v sin v
> exp
(vcosv) sin v
1
Jr f o r 0 < v < -2'
and conclude that/3 > fl0(u) > e x p ( - u - 1). It follows that for/3 > fl0(u), Equation (10) has no real roots. The function v --~ v cos v/sin v is strictly decreasing on [0, Jr) and achieves its maximum value of 1 at v = 0. Thus, if u ~< - 1 , the only possible pure imaginary solution of
Functional differential equations
479
Equation (1 0) in Go is z = 0, and this is a solution if and only if/3 = -or. The same homotopy argument used above shows that if oe ~< - 1 and/3 > -oe, Equation (10) has, counting multiplicity, precisely two solutions in H~-. If ot >7 0, one can argue with the aid of Theorem 4.1 that the number of solutions z 9 H o of Equation (10) (counting multiplicity) is constant for 0 < fl < fl0(ot). For fl sufficiently small and/3 > 0, Equation (10) has two, distinct, negative real solutions. Theorem 4.4 implies that there are exactly two solutions of Equation (10) in Go, so Equation (1 0) has no solutions in H~- for 0 < fl < fl0(ot) and ot >~ 0. The remainder of the proof is left to the reader. [] As an easy consequence of Theorem 4.5, one can determine exactly when all solutions of Equation (10) have negative real part. We state the following corollary for the case/~ > 0, but the same result is true in general. COROLLARY 4.1. Assume that c~ 9 R and ~ > 0 in Equation (10). Then all solutions z o f Equation (10) satisfy Re(z) < 0 if and only if ~ > - 1 , ot + fl > O, and ~ < flo(~), where ~o(oe) "= vo(ot)/sin(vo(ot)) and vo(o~) 9 (0, Jr) is the unique solution v 9 (0, Jr) o f vcos(v) sin(v)
toO/.
PROOF. The case ot - - 0 is covered by Theorems 4.2 and 4.3, so we assume ot 7~ 0. If o t - - / 3 , z - 0 solves Equation (10). If ot ~< - 1 and either/3 > -or or/3 < -or, Theorem 4.5 implies that Equation (10) has a root with positive real part. Thus, if ol ~< - 1 , Equation (10) has a root z with Re(z) >~ 0. If ot +/3 ~< 0, it is clear that Equation (10) has real root z ~> 0. If/3 >/~0(oe), Theorem 4.5 implies that Equation (10) has a root z 9 Go with Re(z) > 0; and if/3 -/30(or), Equation (10) has a pure imaginary root in Go. Conversely, assume that o~ > - 1 , ot +/~ > 0 and 0 /3, (or). By using the facts that w --+ w / s i n ( w ) is strictly increasing on [0, Jr) and w ~ 1/cos(w) is strictly increasing on [0, 7r/2) and on (7r/2, Jr], one can prove that/~, (or) >/~m(Ot) >/30(or) for 0 < m < n. Details are left to the reader. It follows, since 0 ~ 0 i f - o r 0, since otherwise Equation (11) clearly has a nonnegative real root. However, numerical and theoretical studies (see [ 18,38]) show that any complete stability analysis for Equation (11) must necessarily be extremely complicated. Hale and Huang [ 18] fix (a, b, c) ~ R 3 with a + b + c > 0 and consider the "stable region" Da,b,c := D for Equation (l l). If Va.b,c := V := {(r, s) 6 J x J: ( a , b , c , r , s ) ~ S}, D is the maximal connected component of V which contains (0, 0). It is known (see [ 18]) that the boundary of Da,b,c may be complicated, with many "kinks". To make the problems more manageable, Hale and Huang ask asymptotic questions. Given r > 0 and s > 0, when is ()~r,)~s) ~ Da,b,c for all large ~.? When is ()~r,)~s) ~ Da,b,c for all large X? Even these questions are not easy. Aside from stability analysis, one may also need to prove that Equation (11) has a solution which lies in a specified region of C. If I is a given interval of reals, one may need to prove existence of a solution z of Equation (11) with Re(z) > 0 and Im(z) 6 I. Even for simple, special cases of Equation (11), precise answers to such questions may be very complicated: see, for example, the discussion of z + oee -z + / 3 e -3~ = 0 in Theorem 3.3 of [57]. If s / r = n / m , where n and m are positive integers, then writing rz = m w (so sz = nw), Equation (11) is equivalent to w +
(r) --
a +
(
r
) ( r ) b e -mw +
c e -nw - - 0 .
m
The latter equation is of the form studied by Pontryagin, so one can try to apply results from [68], but typically these results only provide a starting point for detailed analysis. Here, we restrict ourselves to some general comments about Equation (11). Define sets U, M a n d M ~ as follows: U = {(a, b, c, r, s) EIR 5 [ a 4 - b + c ~ > 0 , r~>0ands~>0}, M - - { ( a , b , c , r , s , v) ~IR6 l ( a , b , c , r , s ) ~ U a n d i v + a + b e - i r v + c e - i s v - - O } andM ~ = { ( a , b , c , r , s , v) ~ M [a + b + c > 0, r > 0 a n d s > 0}. If (a, b, c) 6 N 3 and a + b + c > 0, define sets Na,b,c and N a,b, c o as follows: Na.b,c -- {(r,s, v) E N 3 1 ( a , b , c , r , s ,
v) e M }
and
N aO, b , c -- {(r,s ' v) e Na.b.c I r > 0 a n d s > 0} The above notation will be used for the remainder of this section. LEMMA 4.4. M ~ is a f o u r dimensional C ~ manifold; and if a + b + c > 0 and N~
7/: 0,
then Na,b. 0 c is a one dimensional C ~ manifold. I f p" R 6 ~ R 5 and q" R 3 ~ R 2 are defined by p ( a , b, c, r, s, v) - (a, b, c, r, s) and q(r, s, v) - (r, s), then p ( M ) is a closed subset o f U, q(Na,b,c) is a closed subset o f R 2 and p ( M ) D {(a, b, c, r, s) 6 R 5 [ a + b + c - 0, r >>.0 and s >~ 0}. PROOF. Take fixed real numbers a, b, c with a + b + c > 0 and define gl (r, s, v) - a + b c o s ( r v ) + c c o s ( s v ) and g2(r, s, v) - v - b s i n ( r v ) - c s i n ( s v ) . If we write x - (r, s, v),
Functional differential equations
481
then Na,t),c o 0 c is a -- {x E ]t~3 I r > 0, s > 0, gl (x) - - 0 and g2(x) ~- 0}. It follows that Na,b, C a , one dimensional manifold if Vgl (x) and V g2(x) are linearly independent for every 0 c. The condition a + b + c > 0 implies that gl (r, s, 0) > 0; so if (r, s, v) E NOa,b,c, x ~ Na,b, v :/: 0. The equation g2 (r, s, v) = 0 then implies (since v :/: 0) that (b, c) r (0, 0). If x = 0 c, a calculation gives Vgl (x) = ( - b y sin(rv), - c v sin(sv), - b r sin(rv) (r, s, v) ~ Na,b, cs sin(sv)) and Vg2(x) = ( - b v c o s ( r v ) , - c v c o s ( s v ) , 1 - br cos(rv) - cs cos(sv)). The above remarks show that if x ~ N~ , then XTgl (x) ~- 0 and Vg2 (x) ~ 0. If Vgl (x) and Vg2 (x) are linearly dependent, there must exist X :/: 0 with Vgl (x) = XVg2 (x). The latter equation yields b sin(rv) - X b c o s ( r v ) and c sin(sv) = )~ccos(sv). Substituting these equalities in the equation X(1 - br cos(rv) - cs cos(sv) = - b r sin(rv) - cs sin(sv), one finds that X = 0, which is a contradiction. Note that it may easily happen that NOa,b,c -- 0. If a > Ibl + Icl, then la + ivl /> a > Ibl + Icl/> [be -i'v + ce-isvl, and Equation (11) has no pure imaginary solution. The proof that M ~ is a (nonempty), four dimensional, C a manifold is similar but easier, and is left to the reader. If v = 0, r ~> 0, s ~> 0 and a + b + c = 0, then (a, b, c, r, s, 0) E M, which implies the final statement of L e m m a 4.4. If (a, b, c, r, s, v) 6 M, then I v l - livl -- la + b e x p ( - i r v )
+ cexp(-isv)]
~ 1, is a bounded sequence. By taking a subsequence, we can assume that vk --+ v; and since M is closed, (y, v) 6 M and p ( y , v) = y E p ( M ) . This proves that p ( M ) is closed. A similar argument proves that q(N~.b.~) is closed. D DEFINITION 4.1. If x, y E U - p ( M ) , we shall say that "x and y are pathwise connected in U - p ( M ) " if there exists a continuous map ~" : [0, 1] --+ R 5 with ~'(0) = x, ~'(1) = y and ( ( t ) ~ U - p ( M ) for 0 ~< t ~< 1. If Q -- {(r, s) E ]R 2 I r ~> 0 and s ~> 0} and a + b + c > 0, two points x ~ Q - q(Na.b.c) and y E Q - q(Na.b.c) are pathwise connected in Q - q(Na.b.c) if there is a continuous map 0:[0, 1] --+ Q - q(Na.b.c) with 7/(0) = x and ~(1) = y. The stability region Da.b.c defined earlier is the set of points x = (r, s) ~ Q - q ( N a . b , c ) which are pathwise connected to (0, 0) in Q - q(Na.b,~). THEOREM 4.6. A s s u m e that (ao, bo, co, ro, so) ~ U - p ( M ) a n d (al, bl, Cl, rl, S1) E U - p ( M ) are p a t h w i s e c o n n e c t e d in U - p ( M ) . Then the equations z + aj q- bj e rjz qcj e - s j : o , j = O, 1, have the same n u m b e r o f solutions z (counting multiplicity) with Re(z) > 0. PROOF. Let ~" : [0, 1] --+ U - p ( M ) be the continuous map in Definition 4.1 and write (t) = (at, bt, ct, rt, st) for 0 e , . If H = {z 6 C IRe(z) > 0} and H e = {z H I lzl < R l, it follows that for R > R , , gt(z) 5~ 0 for Z 6 0 H e and 0 ~< t ~< 1. Using Theorem 4.1, one concludes that go and g l have the same number of zeros in H. D As a trivial corollary of Theorem 4.6, we have the following well-known result. COROLLARY 4.2. l f a > Ibl + Icl, E q u a t i o n (11) has no solutions z with Re(z) ~> 0. PROOF. We apply Theorem 4.6 to the homotopy Ft(z) := z + a nt- t b e -rz -q- tc e -sz for 0 ~< t ~< 1. By Theorem 4.6, it suffices to prove that Ft (iv) 7~ 0 for 0 ~< t Ibl + Icl ~ I t b e -irv -+- t c e - i s v [ .
D
For purposes of locating solutions of Equation (11), we can always assume that bc 7~ 0, rs > 0 and r 7~ s. Otherwise, by a transformation of the form #z -- w, # > 0, we can transform Equation (11) to an equivalent equation of the form of Equation (10), and Equation (10) has already been analyzed. If the numbers r and s in Equation (11) are commensurable, we have already noted that Equation (11) falls in the class of equations treated in [68]. The next theorem shows that Equation (11) is more tractable in this case, and the general analysis of the equation reduces to analysis on certain horizontal strips in C. THEOREM 4.7. Let a, b, c, r a n d s be real n u m b e r s as in Equation (1 l) a n d a s s u m e that c ~ O, 0 < r < s a n d s / r -- n / m , where n a n d m are positive integers a n d n > m. For each integer k define Gk -- {z ~ C I m / r ( 2 k 1)~ < Im(z) < m / r ( 2 k + 1)7r}. I f k 7~ O, there exist n (counting multiplicity) n u m b e r s z E Gk which solve E q u a t i o n (11). I f c > 0 a n d n is even or if c < 0 a n d n is odd, there exist n (counting multiplicity) n u m b e r s z ~ Go which solve E q u a t i o n (11). I f c > 0 a n d n is o d d or if c < 0 a n d n is even, there exist (n + 1) (counting multiplicity) n u m b e r s z E Go which solve Equation (11). PROOF. For z E C, define w ~ C by rz = m w , so sz = n w . We see that z + a + b e -rz -kc e -sz - 0 and z ~ Gk if and only if w E Gk and w + al + bl e -mw -t- Cl e -nw - O, where al = ( r / m ) a , bl = ( r / m ) b and cl = ( r / m ) c . Thus we shall work with the second equation and count solutions in G k. On Gk, consider the homotopy Ft(w) = w + (1-
t)al + ( 1 -
t)bl e -mw + cl e -nu',
O 1, there exists Rk > 0 such that Re(w) ~> - R k if w 6 Gk and F t ( w ) = 0 for some t with 0 ~< t ~< 1. If F t ( w ) = 0 and Re(w) ~> 0, easy estimates imply that Iw[ ~< l a l [ + I b l l + ICl I. Thus Theorem 4.1 is applicable and implies that Fo(w) = 0 has the same number of solutions in Gk as FI (w) = w + cl e -nw = 0.
483
Functional differential equations
If we write n w = ~', FI (w) = 0 has the same number of solutions in Gk as f(~') := + ( n c l ) e -~ = 0 has in the strip {~" I n ( 2 k 1)7r < Im(~') < n ( 2 k + 1)Tr}. By using Theorems 4.2 and 4.3 and Remark 4.1, one sees that for each j ~> 1, the strip {~" I jTr < Im(~') < (j + 2)7r} contains precisely one solution of the equation f(~') = 0 . By taking complex conjugates, one obtains an analogous statement for j ~< - 1. Also, if j ~> 1, Remark 4.1 implies that f(~') ~ 0 if (2j - 1)7r ~< Im(~') ~< 2jzr and c > 0 and f(~') :/: 0 if 2jrr 0 and precisely one solution in Go if c < 0. Combining these facts, one can count the number of solutions ~" of f(~') = 0 with n ( 2 k - 1)Tr < Im(~') < n ( 2 k + 1)Tr and obtain the conclusions of the theorem. [] It is sometimes useful to study a parametrized version of Equation (11): z + )~a + ~.be - ' : + )~c e -s: = 0,
(17)
~. > 0.
Indeed, this is the approach in [ 18] and (after a change of variables) in [57]. If a + b + c > 0, one can easily prove with the aid of the implicit function theorem that there exists ~ > 0 such that for 0 < )~ ~< 6, every solution z of Equation (17) satisfies Re(z) < 0. Generally, given (a, b, c) :/: (0, 0, 0) and 0 < r < s, one can ask for what values of)~ > 0 Equation (17) has a solution z with Re(z) > 0. Obviously, if the hypotheses of T h e o r e m 4.7 are satisfied, this question can be posed much more precisely on each of the strips Gk, k >~ 0. If one poses these questions asymptotically for large )~, the analysis becomes more manageable. ,-,,.,
THEOREM 4.8. A s s u m e that a, b a n d c are real n u m b e r s with (a, b, c) =/= (0, O, O) a n d r and s are nonnegative reals with 0 < r < s. Suppose that z , ~ C is a solution o f multiplicity v o f the equation a + b e -rz -Jr-c e -sz := g(z) = O. There exists 6, > 0 such that g ( z ) ~ 0 f o r 0 < Iz - z,I 0 and x(t) > - 1 for - 1 ~< t ~< 0, then one can easily prove that x(t) > - 1 for all t ~> 0. If one now writes x(t) = exp(y(t)) - 1, one finds that
y'(t)--~[exp(y(t-
1))-
1],
(21)
and Equation (21) is frequently more convenient to work with than Equation (18). More generally, consider an equation of the form
x'(t)--~g(x(t-
1))N(x(t)).
(22)
We assume that g : R ~ ~ and N : R ~ R are continuous maps and that N ( x ) > 0 for - b < x < a, where 0 < a ~< cx~ and 0 < b ~< cx~. If a < cx~ (respectively, b < e~) we assume that N ( a ) = 0 and N is Lipschitzian on some neighborhood of a (respectively, N ( - b ) = 0 and N is Lipschitzian on some neighborhood of - b ) . If 9/ > 0 and x : [ - 1 , y] --+ R is a continuous function which solves Equation (22) for 0 ~< t ~< y and satisfies - b < x (0) < a, one can prove that - b < x(t) < a for 0 ~< t ~< y. Consider now the initial value problem
f ' ( y ) - N ( f (y)),
f(0)--0.
(23)
Elementary existence theory for ordinary differential equations implies that Equation (23) has a solution f (y) defined on a maximal interval ( - d , c), and that limy__._d+ f (y) = - b and l i m y ~ c - f ( y ) = a. If a < cx~ or if a = cx~ and there exist constants A1 and A2 with N ( x ) zo l x(t" 0 ) k - 0 } . One proves that zl - z0 > 1. If there does not exist t > z0 with x(t; 0) = 0, define 05(0) = 0. If there exists t > zl with x(t; 0) = 0, define z2 = z2(0) by 2 2 = inf{t > zl I x(t; 0) = 0}. In this case one proves that z2 - zl > 1 and one defines 05(0) = 7t 6 KA by
R.D. Nussbaum
492
~p(t) = x(z2 + t; 0), --1 ~< t ~< 0. If there does not exist t > zl with x(t; 0) = 0, one defines 4 (0) = 0. One proves that 4 : KA ~ K A is a continuous, compact map. If 4 (0) = 0 and 0 r 0, then x(t; O) extends to an SOP solution of period z2 -- z2(0). Note that both the fixed point 0 and the period z2 (0) are typically not explicitly known. The definition of 4 is elementary and does not involve information about the characteristic equation. However, it is precisely this part of the proof which fails for more complicated equations like x'(t) = - ) ~ g ( x ( t ) , x ( t - 1), x ( t -
y)).
Once 4 is defined, the problem reduces to proving that 4 has a nonzero fixed point in K A. Roughly speaking, we expect condition (4) of Theorem 6.1 to imply that 0 is an unstable fixed point of 4 , and we hope that this instability will imply existence of a nonzero fixed point. If we can find a relatively open subset U of KA such that 0 r U and iKa (4, U) is defined and nonzero, then 4 will have a fixed point in U, and we will be done. The normalization property of the fixed point index implies that i Xa (4, KA) ~- 1. For 3 > 0, define Bs = {0 E KA I I]0]] < 3} and Us = {0 ~ KA: ]]0]l > 3}. If we can prove that there exists 6, 0 < 6 < A, such that 4 ( 0 ) 7~ 0 for 0 6 g z with II011 - ~ and iKz (4, B3) = m ~ 1, then it will follow that iKz ( 4 , U6) = 1 - m r 0, and we will be done. Thus it suffices to find 6, 0 < 6 < A, with iKz (t~, B~) = 0. For notational convenience, define go(x, y) = g(x, y) and gl (x, y) = otox + floy and gs(x, y) = (1 - s)go(x, y) + sgl (, y). Consider the initial value problem
x'(t)---)~gs(x(t),x(t-
1))
f o r t ~>0;
xl[-1,0]--0
E
KA.
(26)
Define 40 = 4 : K A ~ KA. There exists 6, > 0 such that if 0 6 KA and II011 ~ 6,, one can define 4s (0) = 7r E KA corresponding to Equation (26)just as we described above for the original equation (20). One can prove that there exists 6 > 0 such that 4s (0) 7~ 0 for all 0 E K A with 0 < II0 II ~< ~ and all s, 0 ~< s ~< 1. By using the homotopy property, one concludes that
iKA (40, B~)
:=
iKA ( 4 , B~)
=
iKA ( 4 1 , Bs).
Thus it suffices to prove that iKA (41' B~) = 0. Select/~ > 0 with )~/3 > zr/2 and define g2(x, y) = ~y and gs(x, y) = (2 - s)gl (x, y) + (s - 1)gz(x, y). Consider the initial value problem
x'(t)---)~gs(x(t),x(t-
1))
fort ~0;
x][-1,0]--0
E KA.
(27)
Again, there exists 31 > 0 such that if 0 6 KA and II011 ~ ~ and 1 ~< s ~< 2, then one can define 4 s ( 0 ) = 7r E KA just as in the case s = 0. One easily proves that 4 s ( 0 ) ~ 0 for 0 < II0 II ~< ~ and 1 ~ s ~ 2. It follows from the homotopy property that
iKA ( 4 1 ,
B~) - -
iKA ( 4 2 ,
B,S)
for 0 < 6 ~< 31, and it suffices to prove that iKA (42' Bs) = 0.
Functional differential equations
493
N o w define C = {0 6 C ( [ - 1 , 0 ] ) I 0 ( - 1 ) = 0 and 0 is increasing}. Note that by "increasing" we mean that O(sl) ~ 0 for - 1 D D
L OC ( ~2 )
(2.4.14)
Since D is the diameter of the domain s where the particles live one has Ix(0) - y(0)l 1 an estimate of the following type: 0tllull 2,,~
~< c
IIo~r
Ilu II2H3 log Ilu II2MS
(2.4.23)
which gives by integration:
IIu O, 6 > 0 there exists a smooth periodic solution of the 3d periodic incompressible Euler equation Ot U + U 9V x U ~- -- V x p ,
(2.4.25)
V x 9u = O,
which satisfies the estimates:
Ilu IIw.~
and
~
1
~ /Ct p [ [Xl Ip [xz[ p Jt~ I~ 23 (1-0) 1 " The same method can be used to prove the item (ii) with 6, fixed and t going to infinity. Finally if a function 4~(t, s) independent of the viscosity would satisfy (2.4.28) then letting the Reynolds number go to infinity in the Navier-Stokes equation one would contradict the item (i) and the proof is complete. The item (iii) gives some evidence to the difficulty of proving the existence of smooth solutions for the 3d Navier-Stokes equation and could introduce the next section. D
520
C. Bardos and B. Nicolaenko
2.5. Existence a n d regularity results f o r the 3d N a v i e r - S t o k e s equation. The w e a k solution o f J. Leray
In this section it is assumed that the viscosity is non zero (finite Reynolds number) and therefore the equations of the motion in R 3 are Otu + u . V x u -- v A x u = - - V x p ,
(2.5.1)
Vx . u = O .
Assuming that the solution is smooth and multiplying (2.5.1) by u one obtains the local balance of energy
1 (a, + u . Vx - VZXx)-~lu
12 +
vlVxu
12 +
(2.5.2)
Vx " ( p u ) - - 0
which by integration from 0 to t and over 1K3 produces the a-priori estimate.
1
fo
3 ]U(X, t)] 2 d x -Jr-t)
fo'Ilull 2u'
'fo
(R3)(s) ds - -~
3 ]u(x, O)
12
dx.
(2.5.3)
The presence of the term
f0 t Ilu(s)ll 2HI(• 3)(s)ds plus some weak time regularity ensure enough compactness property to prove, with initial data uo(x) ~
L2(]R2),
Vx " uo --O,
the existence of a weak solution
u(.,,)
.,,=0.
(2.5.4)
In (2.5.4), Cw(•+; L2(R3)) denotes the space of function defined in R+ with value in L2(R3)) and continuous with respect to the L 2 weak topology. This is the basic result of Leray (1934). However, as known, even for smooth initial data it has not been possible to prove that the solution will be smooth for all time. Furthermore the class of solutions constructed by Leray is not regular enough to afford a proof of uniqueness (in the same class); also it is not regular enough to show that it satisfies the conservation of energy (2.5.3), a fortiori it is not known if it satisfies the local balance of energy (2.5.2). The following comments are usually made: (1) The instability theorem of P.L. Lions and R. DiPerna proven above shows that uniform estimates (with respect to v) are not available and suggests that the dependence of the regularity with respect to the viscosity may be difficult to control. (2) Some simple regularity results can easily be obtained, for instance:
N a v i e r - S t o k e s equations and dynamical systems
521
(i) If the initial data belongs to the space Hk(R 3) with k > 5/2 then the solution is smooth during a finite time ]0, T[ with T independent of v. (ii) If at the time tl the weak solution (which belongs to C~ Le(R3))) is in H i then it is smooth on a interval tl, T~, with T~ > tl > 0 depending on v and on the norm of u (t l) in the space H 1. (iii) The conjunction of the point (ii) with the fact that u is in Lz(Rt+; HI(R3)) implies that the solution will become eventually smooth for t large enough (how large, up to now, is an open problem). This also implies that the set of points where the weak solution may be singular is small. In fact this idea already was present in the original work of Leray and was refined by several authors. On its present form this refinement culminate with the work of Caffarelli et al. [33] where it is shown that if singularities exists for the Leray solution they should be contained in a set of Hausdorff measure smaller or equal to 1 in R3 • R+. Later on Sohr and von Wahl [ 156] proved for the pressure associated to the Leray solution, the estimate:
p E L 5/3 (if2 •
Z[)
which allowed Fanghua Lin [ 125] to produce a simpler proof of the result of [33]. (3) With the item (ii) the smoothness is realized if one shows that the weak solution is bounded in
Observe that with the divergence free condition one has
3 IVxu(x)]2 dx -- s
3
IV x ul 2 d x .
(2.5.5)
The right hand side of (2.5.5) is usually called the enstrophy and from the Navier-Stokes equation one deduces for co = V • u the equation: Otco + u 9V x c o - co. V x u - v A x c o = O.
(2.5.6)
The energy estimates implies the estimate: v
foTs
t)[ d x d t ~ and Io~(y,,)l
> [sin4~(x, y, t)[ ~
s2 ] (2.5.12)
with ~b(x, y, t) denoting the angle of the two vectors co(x, t) and co(y, t). Then the vorticity, if bounded for t = 0 in Lz(IR3) remains bounded in the same space for t >~0 and therefore the solution is "regular".
REMARK 2.6. The significance of the relation (2.5.11) is: in regions of high vorticity the direction of the vorticity is regular in an averaged sense but uniformly with respect to the initial data and with a 1/v dependence with respect to the viscosity. The significance of the assertion (ii) is that singularities (or loss of control of the regularity) to appear need both large (in modulus) vorticity and large oscillations of the direction of this vorticity. PROOF. As above the proof is made with a priori estimates which are later used for rigorous proof with the introduction of some regularization process. Here the emphasis is put on the a-priori estimates. First, observe that the relation (2.5.11) is just a direct consequence of the estimate (2.5.10). Second, to make the proof simpler and to focus on the key point it is assumed that the estimate (2.5.12) is valid not only at points (x, y) where the vorticity is greater than S-2 but everywhere. Releasing this is hypothesis implies the introduction of terms which are quadratic with respect to the co instead of being cubic and which can be easily handled.
C.BardosandB. Nicolaenko
524
Therefore one writes for the formal estimate:
OtfiR3]('O(X't)[2qL1)fil~3]Vx('O(X't)]2dx~ s ](wVxu,w)]dx.
(2.5.13)
The last term of the right hand side is cubic with respect to w. In fact it involves the strain matrix: S(x,
1 (Vxu + (Vxu)*) } (x, t) = S(w)(x, t),
t) -
where appears the direction
~(x,t) =
co(x, t) leo(x, t)l
of the vorticity. With
~.. Y y --
lyl
and
M 0",
1
co)- ~ [~" | ('~"x co)+ (~" x co)| )']
one has
dy 3 P.V. f M(~', co(x + y ' t))lY13 S(x, t) -- 4--7 and 3
/,
j~ (y, o,~x, ,)) (y, o,(x + y, ,) o,<x ,))dy 3
' t)12 ~-n
JR3
(~', ~x, ,)) (~-, ,o~x + y, ,) ~(x, ,))
dy lyl 3" (2.5.14)
It is in this last term that the hypothesis is used because
](7,~(x,t))(Y,o~(x + y,t),~(x,t))l ~< [o,(x + y,t) I ] sin(~(x + y,t),~(x,t))l l~ clio<x, ,>12f~_~I~ocx+ y, n l ~dy
2
- cl~ocx, ,)l i cx,,)
(2.5.16)
525
Navier-Stokes equations and dynamical systems for which the following estimate can be easily obtained:
Ilz(x,t)llL~ -
,Io,(x+y,t)ll- ~
, dx
V C([]eo(.,t)HL,)2/3(Heo(.,t)[[L2)I/3.
(2.5.17)
With the Cauchy-Schwartz relation and the Gagliardo-Nirenberg inequality which is presently used in the following form:
(fir .,[o,(x)l4dx )'/2 .< c (fR ~lvxo,(x) 12dx )3/4(s ,lo,(x)l-dx .~ )
1/4
one obtains:
s I(~ovxu~o)I dx ~ c s Loo(x,1)12 l ( x , t ) d x > 1, one proves [13] that the corresponding Navier-Stokes system stays smooth for all times (COl is not a small perturbation). Note that the perturbed col-flow is genuinely 3-dimensional. The technique of bootstrapping regularity of solutions of 3-dimensional Navier-Stokes equations by perturbation from limit equations has been done in various contexts: thin domains [146], helical flows [131]. In these previous works, limit equations are 2-D Navier-Stokes equations for which global regularity is well known. In [ 11 ], for the first time, the limit equations are genuinely 3-dimensional, but with restricted wave-number interactions in B(u, u) ("2 89 Their global existence is nontrivial and requires dyadic decomposition methods and Littlewood-Paley theory [ 117]. Similar results for more general Boussinesq equations of geophysics can be found in [9-12,14].
3. H i e r a r c h y of e q u a t i o n s
3.1. Introduction As said in the general introduction one shows that, with the Boltzmann equation, the Navier-Stokes and Euler equations can be derived from a genuine Hamiltonian system of N interacting particles.
C. Bardos and B. Nicolaenko
528
This Hamiltonian system is the beginning of the hierarchy. The end of the hierarchy is the introduction of turbulent models which are in some cases constructed with a statistic description of the fluid. In this case some basic properties of dynamical systems like the ergodic hypothesis are involved and some "magic" numbers like the Kolmogorov exponent appears. Eventually one should observe that the different steps of the hierarchy share in common several features like the evolution of the notion of entropy and the recurrent use of moments or averages.
3.2. The B o l t z m a n n - G r a d limit The purpose of this section is to provide a rapid overview of the derivation of the Boltzmann equation from molecular dynamics. The points that should be emphasized are the following: (i) In this problem there are two natural parameters N the number of particles and a the radius of these particles. N is a very large number and a (expressed in common units, such as centimeters) is very small; Consider a rarefied gas in a box whose volume is 1 cm 3 at room temperature and atmospheric pressure. Then N "~ 10 2~ a -- 10 -8 cm and N a 2 -- 1 m 2 is a sizable quantity. Therefore it is natural to consider situations where lim
N---->o~, a--~O
No -2
is strictly positive and finite. This gives the mean free path and the Knudsen number. (ii) The transition from a reversible problem to a irreversible problem is made by an averaging process which takes in account the self interaction of the particles of the media. The direction of the time appears because one obtains an equation for averaged quantities at time t > 0 only keeping information on averaged quantities at time t -- 0. The same construction should be possible for negative time but would lead to a Boltzmann equation with negative term that would therefore increase the mathematical entropy. (iii) On one hand the nonlinearity helps because at variance with diffusion approximation of reversible linear systems the entropy at the level of the Boltzmann equation (a quantity which naturally decays) is the limit of a quantity which, due to the nonlinearity, is not conserved by the molecular dynamics. Therefore this does not contradict strong convergence results. (iv) On the other hand non-linearity creates also a limitation on the obtaining of rigorous results based on strong convergence because such results would be, when the kinetic limit is involved, in contradiction with the instabilities of the compressible and incompressible Euler equations described in the previous section. At present there are two types of rigorous results. Both involve regular quantities and therefore they should be kept away from the limits leading to singular solutions of the compressible Euler equation and there are two ways to do so.
Navier-Stokes equations and dynamical systems
529
The first one (Lanford [118]) is to start from very regular initial data and prove the results for a very small time that would avoid the time where the compressible Euler equation may present singularities. The second one is to consider a dilute gas (Illner and Pulvirenti [95]) in an infinite media which will never behave like the solution of the compressible Euler equation and therefore global-in-time convergence proof can be obtained in this case. However since this regime does not lead to the Fluid dynamics equations it should not be considered as a pertinent step for our hierarchy. Below only a formal proof is given following the Section 2.2 of Cercignani, Illner and Pulvirenti [43]. The convergence proofs quoted above can also be found in this book. In any case for the derivation it is both natural and compulsory to invoke the B B G K Y hierarchy named after Bogoliubov, Born, Green, Kirkwood and Yvon. This point of view was discovered by Yvon in 1935 and rediscovered independently eleven years later by Kirkwood, Born and Green on one side and by Bogoliubov on the other. It is in the construction of the BBGKY hierarchy that the Boltzmann entropy (which as explained in the previous section is simply related to the macroscopic entropy) appears as a limit process which is not in contradiction to the derivation of a reversible system from an irreversible one. The starting point is the consideration of a family of N particles of radius a which evolve freely in the whole space and interact through elastic collisions. More precisely if two particles with incoming velocity (~, ~,) and centers x and x, collide (i.e., Ix - x , ] - or) then the outgoing velocities (~', ~,) compatible with the conservation of mass momentum and energy are given (in term of the incoming velocities) by the formula:
with X mY*
co - Ix - x, I'
~ - ~* + co[co" (~ - ~* )]"
(3.2.1)
For obvious reason the above problem is called the hard sphere model. Other models are based on mass points interacting with central forces. However in this case the Boltzmann Grad limit is more difficult to obtain and to the best of our knowledge it is up to now only done with the introduction of a ad hoc cutt off (cf. [42, p. 59]). N is the Avogadro number and it is of the order of 102~ and cr is of the order of 10 -8 meters while N o 2 is of the order of 1 square meter. This means that the Boltzmann equation should be derived from the molecular dynamics by letting N go to infinity, o- to zero and letting No -2 go to a positive finite constant which is the inverse of the Knudsen number. It is convenient to denote by z
=
.....
.....
•
the variables of the s dimensional phase space and by ps (z l, Z2 . . . . . Zs) the probability of having jointly the s particles at the point {xl, x2 . . . . . xs} with velocity {~l, ~2 . . . . , ~ }.
C. Bardos and B. Nicolaenko
530
It is assumed that these functions are symmetric with respect to their arguments (observe that if such a property is true at some time it is conserved for all time by the collision rule given by (3.2.1)) and are equal to zero on one hand for s > N and on the other hand for
z ~ A s,
A s = {z s such that Vl 0
while the entropy dissipation rates satisfy
lim sup(C ( Fe ) log Fe ) ~< (C (F) log F}. e---->0
Then the limit F(t, x, v) is a Maxwellian distribution, p(t,x) ( F ( t , x , v ) = (2zrO(t~x))3/2 exp
l lv - u(t,x)[ 2)
2
0~x)
'
(3.3.10)
where the functions p, u and 0 solve the compressible Euler equations, Otp + v~ 9(pu) - O , at(pu) + vx 9(pu | u) + Vx(pO) - 0 ,
Ot(p(~lul2 +23 0 )) + Vx "(PU(21 lu'2
5))
(3.3.11) -o
and satisfy the entropy inequality,
(3.3.12) PROOF. Multiplying (3.3.9) by e(1 + log Fe) and integrating over v gives the entropy relation s(Ot(Fs log Fs) + Vx . (vFs log Fs)) --(C(Fs)log Fs).
(3.3.13)
Letting e go to zero in (3.3.13) and using the convergence assumptions of the theorem regarding the entropic quantities shows that the limiting distribution F must satisfy
0 ~< lim sup(C(Fe)log 8--+0
Fe) ~o is a compact set in the space H, ~A c H, such that
S(t)A = A
gt ) 0
(5.1.6)
and A attracts all bounded sets of H, i.e., for all 13 C H bounded, for all e > O, there exists 7'1 = Tl (e, 13) such that, for t ~ T1 (e, B), S(t)B is included in an e-neighborhood of A. When the viscosity is large enough (small Reynolds numbers) A is reduced to the unique solution of the time independent equation u. V~u-- vAu + V ~ p = f,
(5.1.7)
V~.u=0.
However, as is the case in finite dimensional models (like the Lorentz attractor [128]), which is constructed as the simplest Galerkin approximation of the Boussinesq equation), the structure of the complexity of A increases with the Reynolds number. The first steps in this process are described by adaptation to the Navier-Stokes equation of the standard bifurcation theory and could be found for instance (with other references) in Chossat and Iooss [46]. Then the trend toward the complexity of the attractor should be understood by the introduction of a cascade of bifurcations. However rigorous construction of bifurcations after the second order seem to be out of the scope of our present knowledge and are in any case very different from the analysis in a turbulent regime which is the goal of the present section. Observe that the complexity depends on the viscosity v, the size of the box L and the magnitude of the driving force f ; therefore, it should be described in terms of a dimensional number depending on these three quantities. Such a number is called the generalized Grashoff number. In dimension 2 it is given by the formula:
G-
- -j
(5.1.8)
I/(x)l 2dx
and in dimension 3 it is convenient to replace the above definition by the formula:
a-
L2IA_I/2f[
v2
= Lv22 ( f s 2
(--A-If(x)
9f ( x ) ) d x
)1/2 .
(5.1.9)
For large Grashoff number the fluid should become ergodic and define an intrinsic probability measure. More precisely, one assumes the following ergodicity hypothesis Herg:
Navier-Stokes equations and dynamical systems
559
There exists a unique probability measure # on the phase space H invariant under the action of the Navier-Stokes semiflow such that, for almost any initial data u0 ~ H and any functional @ (u) representing some physical quantity associated with the fluid flow u,
{'(UO))-- T--~o~li(1 m fo T O(S(t)uo)dt)
-- fH O(uo)d#(uo).
(5.1.10)
Using the Fourier series representation:
u(x)-- Z kcZ
ak(u)e2Jr/Lkx
(5.1.11)
D
one can define, for any 0 < tel < K2, UKI.z2
UKI.K2(X) --
Z
ak(u)e2:r/Lkx
(5.1.12)
KI~-.. ~> ot,,(t, uo) >~... ~ 0 of eigenvalues for the self adjoint positive operator (DS* (t, u0) o DS(t, uo))1/2. Classical Lyapunov numbers would be defined as: ~.,,(u0) -- lim {ot,,(t, t--+ oo
u0)}l/t
and
#,,(u0) - log)~,,(u0).
(5.4.22)
However such pointwise Lyapunov numbers may not exist (since we do not know the existence of a canonical ergodic measure # on A), therefore one uses a topological version of uniform (global) Lyapunov numbers introduced in [53] and expanded in [68]. Let:
Pk(t, uo) = otl (t, u0)ot2 (t, u 0 ) ' ' "~k(t, uo),
(5.4.23)
rCk(t) -- sup{ Pk(t, uo)" uo ~ A},
(5.4.24)
because of the subexponential identity rCk(t + s) C. The result is a consequence of the existence of two strictly positive constants c~ and 13 such that one has PROOF.
o~(llu 0, while in the focusing case, the limit c vanishes.) Consider the operator L, Equation (3.4), as an (unbounded) differential operator on L 2 (R), which is known as the "Zakharov-Shabat" operator. Denote its point spectra (eigenvalues with L2(R) eigenfunctions) by {Xl, 1.2 . . . . . ~ , N } - A s the coefficients q ( x , t) of this differential operator evolve in time t according to 1-D NLS equation (3.1), one expects the eigenvalues Xj (t) to change with time. But they do not! A simple calculation using the Lax pair (3.2) shows that the eigenvalues are constant in t. These eigenvalues provide N invariants for the 1-D NLS equation (3.1) - where the number N, as determined by the initial data, can be very large and often exceeds the number of classical invariants of L 2 norm, energy, and linear momentum. Thus, the 1-D NLS equation possesses some unusual invariants, in addition to the classical ones. These invariants arise after considering the eigenvalues as functionals of the coefficients q(-, t): Xj (t) -- Xj [q (., t)] . This viewpoint leads one to consider determining q(., t) from spectral data of the differential operator (3.4). Clearly a finite number N of eigenvalues will be insufficient data to determine the function { q ( x , t) Yx ~ ( - e c , +~x~)}, and the eigenvalues will have to be augmented with additional spectral data. But this is a well known problem in mathematical physics known as "inverse scattering t h e o r y " - particularly so for the Schr6dinger operator of nonrelativistic quantum mechanics, but also for the operator (3.4) which is a form of the Dirac operator of relativistic quantum mechanics.
The nonlinear SchrSdinger equation
611
The appropriate spectral data (see, for example, [78,64,10,11]) is S ---- {~j, cj, j -- 1, 2 . . . . . N" r(s
V~ ~ ( - o c , +r
(3.5)
where )~j denotes the eigenvalues, Cj denotes certain norming constants of the associated L 2 eigenfunctions, and r()~) denotes the "reflection coefficient" defined through the asymptotic behavior (as Ixl --> oo) of the generalized eigenfunctions for the continuous spectrum: if 7s (+) are matrix solutions of Equation (3.3), normalized by ~(+) (x,)~) ~ e izx~r3 ,
x --* +cx~,
(3.6)
then from the transition matrix (which is independent of x)
[~+]-i ~_ = (a0~,b()~,)
)
bO~, t) a()~, t)
'
(3.7)
one defines the reflection coefficient as follows:
rO~)-- a(,k)
(3.8)
(see, for example, [64]). Each member of the spectral data S is viewed as a functional of q, and the data S uniquely determines q by the integral equations of inverse scattering theory [50,78]; that is, the correspondence between q and S is one-to-one and invertible [50]. There exist several equivalent formulations of the integral equations of inverse scattering theory, including the Gelfand-Levitan equations [78] and the equations of Riemann-Hilbert theory [52,54]. The latter have proven to be the most powerful for mathematical analysis of asymptotic behavior. (See Sections 7 and 8.) While these integral equations are difficult to solve analytically, they do provide explicit representations of special solutions which consist of N-solitary waves in interaction, in the absence of any radiation r0~) --= 0 V)~. These representations have the functional form of a "log-determinant", which leads to interesting analysis as N (the number of solitary waves) tends to infinity. (See Section 8.) As q (x, t) evolves in time according to 1-D NLS, one can use the Lax pair (3.2) calculate the time evolution of the spectral data S:
)<j (t) = )<j (0), c j ( t ) = exp[4i~.jt]cj(O),
(3.9)
aO~, t) = a()~, 0), bO~, t) -- exp[-4i)~Zt]bO~, 0).
Thus, r()~, t) -- e x p [ - 4 i ) ~ Z t ] r O ~, 0),
(3.1o)
612
D. Cai et al.
and we have the following (infinite!) number of constants of motion: {~.j(q) Yj -- 1. . . . . N;
]r(Z; q)[ u
E (-~,
+e~)].
(3.11)
Thus, 1-D NLS (3.1) is an infinite dimensional Hamiltonian system with an infinite number of constants of motion. Indeed, exactly one-half of the spectral data is invariant {)~j Vj = 1 . . . . . N; Ir(&)l V& ~ ( - ~ , + ~ ) } , while the other half evolves linearly with t: {log(cj) 'v'j = 1 . . . . . N; logr(~.) 'v'~. E ( - c ~ , +cx~)}. Thus, using the inverse spectral representation, one establishes that 1-D NLS (3.1) is a completely integrable Hamiltonian system. This infinite collection of constants of motion explains the remarkable stability and elastic collision properties of solitary waves: First, one must understand the connection between spectral data and solitary waves. The log-determinant formula for N-solitary waves, together with the invertibility of the map to scattering data [50], establishes that there is a one-to-one correspondence between the solitary waves in the spatial profile and the bound state eigenvalues in the spectral data. The N eigenvalues correspond to N solitary waves, with the amplitude and speed of each fixed by the real and imaginary part of the associated eigenvalue. Moreover, the reflection coefficient r(Z) fixes the amplitude of the )~th radiative component of the nonlinear wave. The temporal behavior of the spectral data (3.10) shows that the speeds and amplitudes of the solitary waves are invariant in time, and are not altered by "interactions of the solitary waves". And, since Ir()~, t)l = Ir()~, 0)1, no radiation can be generated by these interactions. In other words, the infinite number of invariants so rigidly constrain the solution that the elastic collision properties of 1-D NLS (3.1) result! Solitary waves which satisfy the elastic collision property are called solitons, to emphasize the remarkable particle-like properties of these nonlinear waves. 3.1. Periodic spatial boundary conditions In our overview, we have focused upon solutions of 1-D NLS on the whole line, which decay rapidly as Ixl -+ ~ . Now we turn to solutions of (3.1) under periodic boundary conditions of (spatial) period s q(x + s t) = q(x, t). NLS is still equivalent to the Lax pair (3.2), and it is still relevant to view the Zakharov-Shabat operator (3.4) as an (unbounded) operator on L2(R), even though its coefficients q(x, t) are e-periodic functions of x. Since its coefficients are periodic in x, Floquet theory can be used to understand the spectral theory of the differential operator (3.4). The well-known Floquet procedures for Hill's operator [135,161] readily extend to the Zakharov-Shabat operator (3.4). Note that this operator is self-adjoint in the defocusing case, but it is not self-adjoint in the case of focusing nonlinearity. This lack of self-adjointness is the only real difficulty for its Floquet theory, and is also the source of the most interesting phenomena of the NLS equation under periodic boundary conditions [130]. The spectrum of the Zakharov-Shabat operator (3.4) with periodic coefficients, when viewed as an unbounded operator on L2(R), consists entirely of continuous spectrum which resides on a countable number of curves in the complex plane, called "bands of spectrum". In the self-adjoint case, these bands lie on the real axis, while in the nonselfadjoint case, they are not so constrained. In both cases, the bands terminate at periodic
The nonlinear Schr6dinger equation
613
and antiperiodic eigenvalues, which typically have multiplicity one. However, for certain special coefficients, these bands can join at eigenvalues of higher multiplicity. (Consider, for example, the simplest case, q(x) = 0, for which all bands join at eigenvalues with multiplicity 2, and the continuous spectrum consists of the entire real axis.) Again, calculations using the Lax pair (3.2) show that the eigenvalues provide a (countably infinite) collection of constants of motion. Moreover, inverse spectral theory [ 130] (although not as complete for the nonself-adjoint Zakharov-Shabat operator (3.4) as for the Hill's operator [ 161 ]) shows that 1-D NLS (3.1) under periodic boundary conditions is a completely integrable Hamiltonian system. Its integration is accomplished through "Louiville's method" [5,4], as realized by an Abel-Jacobi transformation and theta functions. This procedure amounts to a transformation from q (x) to action-angle variables [99, 98], a beautiful procedure which is most easily described for soliton equations in the case of the Toda lattice [69,71,43]. Generically, the level sets of this countable collection of eigenvalue invariants, {q 6 H l ] ~.j(q) -- Lj(qo) Vj}, are infinite dimensional tori. The solutions to the NLS equation under periodic boundary conditions wind around this torus, executing almost-periodic motion in time t. One should think of the nonlinear Schr6dinger wave as being decomposed into a countable number of oscillators (called "degrees of freedom"), one for each dimension of the torus. Each oscillator has both an amplitude and angle of oscillation, with the amplitudes fixed by the constants of motion and the angles providing coordinates on the infinite dimensional torus. As the values of the constants of motion change, the tori deform and fill out (or "stratify") the function space H 1. As noted above, for special choices of coefficients q,, bands of spectrum can join. As the coefficient approaches a special q,, two eigenvalues coalesce. As this occurs, the torus become degenerate in that its dimension decreases by one. (Intuitively, the amplitude for one of the oscillators vanishes, and the system loses one of its degrees of freedom.) In the self-adjoint case, the pinched torus which results is always stable, in the sense that nearby coefficients have tori for which the oscillatory degree of freedom that was "pinched away" at q, now executes small amplitude oscillations [ 140]. In this stable case the singular level set {q 6 H 1 ] )~j(q) -- Xj(q,) Vj}, consists only in the degenerate torus itself. On the other hand, in the nonself-adjoint case, the degenerate torus T, can be unstable. When it is unstable, the singular level set is larger than the torus itself, containing the unstable manifold W ~'(T,) as well as the torus T,. Intuitively, the circle which is "pinched" becomes one lobe of a "figure eight", rather than just a point. (See [63,130] for pictures.) A homoclinic orbit results which approaches the degenerate torus T, as t approaches infinity: qhom(X, t) --+ T,
as t --+ •
Inverse spectral theory establishes that these unstable tori cannot result from eigenvalues which coalesce on the real axis; hence, instabilities and homoclinic orbits must be associated with complex valued multiple eigenvalues, which must be finite in number. Hence, the dimension of the unstable manifold W u (T,) must be finite. Such spectral matters are discussed in detail in [ 130,149].
614
D. Cai et al.
An elementary example which illustrates these instabilities and their associated integrable geometry begins from the trivial x-independent solution of NLS equation (3.1)"
qc(x,t" c, y ) - - c e x p [ - i ( 2 c 2 t
+ y)],
(3.12)
where (c, y) denote two real parameters. For each value of c, this solution is a single circle. It has only one degree of freedom, with the remaining (countable number) of degrees of freedom all "pinched away". In other words, the torus T, -- S 1, is one-dimensional; hence, extremely degenerate. The linear stability of solution (3.12) is easy to study:
q ( x , t ) -- q c ( x , t ) + ~ f ( x , t ) e x p [ - i ( 2 c 2 t
+ y)],
i ft -- fxx -t- 2 c 2 f + 2 c 2 f + O(6), f (x, t) -- } ( k ) exp[i (kx - co(k)t)], ,0
-
k 2[k 2 - 4
2].
Thus, the wave (3.12) is unstable to fluctuations with wave numbers 0 < k 2 < 4c 2" while shorter wavelength fluctuations are neutrally stable according to linear stability theory. The "quantization condition" which ensures spatial periodicity,
kj=
27rj
j-...,-1,0,+l
.....
shows that the number of unstable Fourier modes scales linearly with the size ~ of the periodic spatial domain. This instability of the plane wave (3.12) to long-wave fluctuations is a special case of a famous instability in nonlinear dispersive wave theory, known as the "Benjamin-Feir instability" [ 12] in the context of water waves and as the "modulational instability" in the context of plasma physics [198]. It is now understood to be the fundamental cause of solitary wave formation, of self-focusing and filamentation of a laser beam, and, more generally, of blow-up in finite time. This calculation of the tangent space to the unstable manifold of the circle S = qc shows dim W u (S) - 2 N + 1, where the "2N" comes from the {cos (kjx), sin (kjx), j = 1. . . . . N} basis of the unstable tangent space, and the "1" is the dimension of the circle S itself. Using integrable theory, one can identify all unstable tori T, for 1-D NLS, and construct rather explicit representations of their unstable manifolds W" (T,), which for the integrable NLS equation equal their stable manifolds W s (T,). This beautiful representation results from B~icklund (Darboux) transformations- a construction which we now describe in its generality [60,130,149]. First, one [60,130,149] establishes that, for each instability, there is an associated complex eigenvalue of with multiplicity at least two. Thus, there is a correspondence between instabilities and complex multiple points in the periodic and antiperiodic spectrum of the
The nonlinear Schr6dinger equation
615
Zakharov-Shabat operator (3.4) - a correspondence which enables us to classify the unstable tori. Fix a periodic solution of NLS which is quasiperiodic in t, unstable, and for which the instability is associated to a complex double point v with multiplicity 2, for the operator L(q). We denote two linearly independent Zakharov-Shabat eigenfunctions at (v, q) by (~+, ~ - ) . Thus, a general solution of the Zakharov-Shabat linear eigenvalue problem at (q, v) is given by $ ( x , t" ~" o+, o _ ) =
c+6 + + o-6-.
We use r to define a transformation matrix G by G-G(X; where N--
o )
v" ~) =-- N ( A -
X-O
N-
,
(3.13)
_&]
r
(/)2
~1
"
Then we define Q and l/, by Q(x, t) = q(x, t) + 2(v - fi)
r
~1~2 -}- r
(3.14)
and
(x,,.
-
c(z;
z),
(3.15)
where ~p solves the Zakharov-Shabat linear system at (q, v). Formulas (3.14) and (3.15) are the B~icklund transformations of the potential and eigenfunctions, respectively. We have the following: THEOREM 3.1. Define Q(x, t) and q-'(x, t" X) by (3.14) and (3.15). Then" (i) Q(x, t) is a solution of NLS, with spatial period g~; (ii) The spectrum a( L(Q)) - a( L(q)); (iii) Q(x, t) is homoclinic to q(x, t) in the sense that Q(x, t) --+ qo+ (x, t), exponentially as exp(-a~ Itl) as t --+ i c ~ . Here qo• is a "torus translate" of q, av is the nonvanishing growth rate associated to the complex double point v, and explicit formulas can be developed for the growth rate av and for the translation parameters 0• (iv) q.' (x, t; A) solves the linear system (3.15) at (Q, x). This theorem is quite general, constructing homoclinic solutions from a wide class of starting solutions q (x, t). Its proof is one of direct verification, following the sine-Gordon
616
D. Cai et al.
model [60,139]. Periodicity in x is achieved by choosing the transformation parameter )~ = v to be a double point. Several qualitative features of these homoclinic orbits should be emphasized: (i) Q(x, t) is homoclinic to a torus which itself possesses rather complicated spatial and temporal structure, and is not just a fixed point; (ii) nevertheless, the homoclinic orbit typically has still more complicated spatial structure than its "target torus"; (iii) when there are several complex double points, each with nonvanishing growth rate, one can iterate the B~icklund transformations to generate more complicated homoclinic manifolds; (iv) the number of complex double points with nonvanishing growth rates counts the dimension of the unstable manifold of the critical torus in that two unstable directions are coordinatized by the complex ratio c+/c_. Under even symmetry only one real dimension satisfies the constraint of evenness, as will be clearly illustrated in the example below; (v) these B~icklund formulas provide coordinates for the stable and unstable manifolds of the critical tori; thus, they provide explicit representations of the critical level sets which consist in "whiskered tori" [3].
An example: The spatially uniform plane wave. As a concrete example, we return to the spatially uniform plane wave qc, Equation (3.12), for which the entire construction can be carried out explicitly: A single B~icklund transformation at one purely imaginary double point yields Q = QH(X, t; c, Y; k = Jr, c+/c_):
Q.-[
cos 2p - sin p sech r cos(2kx + 4~) - i sin 2p tanh r
ce-i(2c2t+v)
1 + sin p sech r cos(2kx + ~b)
eqZ2iPce -i(2c2t+V)
a s "g ~
Too
(3.16)
where c+/c_ =-- exp(p + ifl) and p is defined by 2cexp(ip) = (1 + icr), o = x / 4 c 2 - l, r = o't - p, 4~ = P - (fl + zr/2), and where the spatial period g -- 1 (see Figure 2). Several points about this homoclinic orbit need to be made: (i) The orbit depends only upon the ratio c+/c_, and not upon c+ and c_ individually. (ii) Q H is homoclinic to the plane wave orbit; however, a phase shift of - 4 p occurs when one compares the asymptotic behavior of the orbit as t ~ - o o with its behavior as t --+ + Oo. (iii) For small p, the formula for Q/4 becomes more transparent: Q/-/"~ [(cos 2 p -
i sin2p tanh r) - 2 sin p sech r cos(2kx
+
dp)]ce -i(2c2t+y) .
(iv) The complex transformation parameter c+/c_ = exp(p + ifl) can be thought of as S x R. In the formula an evenness constraint about x -- 0 can be enforced by restricting the phase 4~ to one of two values 4~ = 0, zr. In this manner, evenness reduces the formula for QI-/from S x R to two copies of R. In this manner, the even symmetry disconnects the level set. Each component constitutes one "whisker" of the "whiskered circles". While the target q is independent of x, each of these whiskers has x dependence through cos(2kx). One whisker has exactly this dependence and can be interpreted as a spatial excitation located near x = 0
The nonlinear Schr6dinger equation
617
Fig. 2. Homoclinic orbits associated with one instability (left panel) and two instabilities (right panel).
(Figure 2 (left p a n e l ) ) - while the second whisker (not shown) has the dependence cos(2k(x - zr/2k)), which we interpret as spatial structure located near x -- 1/2. In this example, the disconnected nature of the level set is clearly related to distinct spatial structures on the individual whiskers. In this example the target is always the plane wave; hence, it is always a circle of dimension one, and here we are really constructing only whiskered circles. On the other hand, in this example the dimension of the whiskers need not be one, but is determined by the number of purely imaginary double points, which in turn is controlled by the amplitude c of the plane wave target and by the spatial period. (The dimension of the whiskers increases linearly with the spatial period.) When there are several complex double points, B~icklund transformations must be iterated to produce complete representations of the unstable manifold. While these iterated formulas are quite complicated, their parameterizations admit rather direct qualitative interpretations (see Figure 2 (right panel)). Thus, B~icklund transformations give global representations of the critical level sets. The level sets in the neighborhood of these of critical ones have fascinating topological structure [63,130]. The plane wave example under even symmetry and with only one instability provides the simplest case. Here, dim W '' (q = S) = 2 - the dimension of each homoclinic
F Fig. 3. Trouser diagram.
618
D. Cai et al.
orbit, plus the dimension of the target circle q = S. In addition, NLS also possesses a four-dimensional invariant manifold which contains W u (q = S), and which can be viewed as the result of "shutting-off" all degrees of freedom except for the spatial mean and the "first radiation mode". In this four-dimensional space, the fixed energy level sets topologically form a trouser diagram shown in Figure 3. (The "trouser • S l'' forms the threedimensional, fixed energy manifold.) Note in particular the symmetric pair of homoclinic orbits and their relationship to the two legs, one of which represents a (periodic) soliton located at the center of the periodic domain at x = 0, and the other a soliton located onehalf period away at x = ~/2. When all other radiation degrees of freedom are excited, each forms a small disc (a center for each additional radiation degree of freedom), and the full phase space can be represented topologically (locally, near the trouser) as the product of the trouser with a countable number of discs. More complex examples are described in [130].
4. Temporally chaotic behavior The existence of instabilities and their associated homoclinic orbits for the integrable NLS equation indicates that external perturbations could induce chaotic responses in near by perturbed deterministic pdes. Moreover, the trouser topology nearby critical level sets, together with the correlation of the two legs of the trouser with two distinct spatial locations for a soliton ("center" and "edge" of the periodic domain), indicates that chaotic behavior under deterministic perturbations might involve a "random jumping" of a solitary wave between these two spatial locations. An exciting possibility arises - Smale horseshoes [ 171 ] and chaotic symbol dynamics [191 ] in a pde setting. Moreover, this temporal chaos - involving interactions of solitary waves with each other, with radiation, and with external perturbations- should be easily observed in numerical simulations, and even in laboratory experiments. And indeed this type of chaos does appear to exist for certain near-integrable systems - temporal chaos resulting from competitions between, and instabilities of, spatially coherent solitary waves. 4.1. Numerical experiments As described in the references [15,149], we designed some numerical experiments to investigate this exciting possibility. For example, we considered a damped-driven perturbation of an NLS equation in the form: - 2 i q t + qxx +
(1 )
-~qgl - 1 q -- iotq - V ~ F e -i•
(4.1)
with periodic even boundary condition q ( x + g., t) = q ( x , t),
q ( - x , t) = q ( x , t),
(4.2)
and initial condition a periodic extension of the single soliton waveform q ( x , O) -- 4eme -2ierx sech(2emx),
(4.3)
The nonlinear SchrOdinger equation
619
where e - er 4- ie,n, with er chosen so that e -2ie'x is periodic of period s (usually er = 0 and em = 1/2). These numerical experiments are described in detail in the survey [149], including: (i) the numerical algorithms and their validation, which are essential when studying longtime temporal integrations of chaotic behavior of unstable orbits; (ii) the collection of chaotic diagnostics with which we post-processed the numerical data; and (iii) a detailed discussion of our numerical observations. Here we only give a brief description of typical observations, for the simplest case where temporal 6haos was observed. We organized our numerical studies into bifurcation experiments in which all parameters were fixed (dissipation strength or, spatial period g), except for the amplitude of the driving force F , which was increased from experiment to experiment as a "bifurcation parameter". In the simplest case, we set ot ~ 0.1538 and choose the spatial period g ~ 6.12, for which only one instability is present. (For larger periods g more complicated behavior was observed.) Sample results are pictured in Figure 4. While the details of the bifurcation sequence are somewhat involved [149], the general pattern may be summarized as follows. As F increases, the long-time behavior of the wave undergoes the following sequence of changes in Iq(x, t)[: (i) spatially flat, time independent; (ii) "sech-like" in space, time independent; (iii) sech-like in space, but time periodic; (iv) sech-like in space, quasiperiodic in time; (v) chaotic in time, with the sech-like excitation jumping from center to edge of the periodic spatial domain. We used standard chaotic diagnostics to identify chaotic b e h a v i o r - including Poincar6 sections, power spectra, Lyapunov exponents, and information dimension. Each of these diagnostics is defined and discussed in detail in [149]. In Figure 4, we show four sample "cross s e c t i o n s " - for time-independent, periodic, quasi-periodic, and chaotic temporal behavior. We emphasize that this experiment, which is the simplest that we have found which has chaotic behavior, is extremely important for our theoretical studies. In it, the chaotic state contains only one spatially localized coherent structure. At times this solitary wave is located at the center, and at other times it is seen at the edges of the periodic spatial domain. These two locations are the only two allowed under even boundary conditions. We believe that one source of the chaotic behavior is an irregular (random?) jumping of the solitary wave between center and edge locations (see Figure 5). This center-edge jumping of the solitary wave through homoclinic transitions forms the basis for the simplest description and model of chaotic behavior.
Fig. 4. Perturbed solitonic dynamics. From top to bottom: (1) locked state, (2) periodic state, (3) quasiperiodic state, and (4) temporal chaotic state. Plotted here are Iq(x, t)I. The right panels are the corresponding surface cross sections {Req(0, t), Imq(0, t) Vt}. Note that for the case of the quasiperiodic and chaotic dynamics shown here, the values of the driving F differ only by 0.4%.
620
D. Cai et al.
The nonlinear Schrgdinger equation
621
1.0
i
0.8-
i
L 0.6
i
! _In i i :
7 717: "7
7 '-[ r ,
0.4-
i
!
I
!
0.2-
ii i
I
'
'i 0.0 ~ - - 1000.0
i !
i
I
I
1
1
J J
:
I
I
1200.0
[
!i
!
i
ii
I
ii
I
!, i
i
i
I,
!
!
ii
I
;
i
.,i 1400.0
1600.0
1800.0
2000.0
time
Fig. 5. Center-edge jumps of soliton in the chaotic state. The dark line segments are the temporal traces of the maximum of [q (x, t)l.
4.2. P e r s i s t e n t h o m o c l i n i c o r b i t s The first step toward analytical descriptions of such chaotic behavior is to assess the persistence of homoclinic orbits. These can provide a "skeleton" for chaotic trajectories. That is, persistent stable and unstable manifolds, and their intersections, provide a framework with which chaotic behavior can be described. Procedures for this description are well known for finite dimensional dynamical systems [85,191], and have recently been developed for the NLS p d e [ 131]. See also [ 147] for a rather detailed overview of these mathematical arguments. Here we present a brief sketch of the arguments, taken from [ 147], and state the persistence theorem. Specifically, we study a perturbed nonlinear Schr6dinger equation (PNLS) of the form iqt - qxx +
2[q~ - co2]q + i e [ D q - 1],
(4.4)
where the constant oJ 6 ( 89 1), e is a small positive constant, and D is a b o u n d e d negative definite linear operator on the Sobolev space H e,p i of even, 2n periodic functions. Specific A
examples of the dissipation operator D include the discrete Laplacian and a "smoothed Laplacian" given by A
A
D q -- -o~q - ~ B q ,
(4.5)
622
D. Cai et al. A
where the operator B has symbol given by
b(k) =
k Or
k 0 is required which satisfies a codim 1 constraint. However, in the numerical experiments [ 149], chaotic behavior is observed for/3 = 0, over a range of ot values.) Finally, the construction of the horseshoe is almost always performed for generic
630
D. Cai et al.
abstract models, rather than for a fixed specific dynamical system. To us, this generic situation seems to be a severe limitation of the practice of the m e t h o d - and particularly so for the NLS pde with its singular, two-time scale, homoclinic orbits. 4.3.2. Long complex transients. Recently, Hailer has been developing an alternative perspective, which he has applied to finite dimensional discretizations of the perturbed NLS equation [88,87], and to the pde [86]. In his work, using very similar geometric perturbation methods, he constructs a large class of heteroclinic orbits from the saddle Q to (for example) the sink P. These orbits have complex patterns of center-edge jumps, finite in number. While only transient behavior, the length of the transients is arbitrarily long. In any case, this set of heteroclinic orbits certainly demonstrates very complicated dynamics which depends sensitively upon initial conditions. Moreover, these orbits are associated with a "mixing and entangling" of the unstable manifolds. And, as the second measurement is not required to force the orbit to return to the saddle Q, these heteroclinic orbits exist for a full open set of external parameter values, without any codim 1 restriction. 4.4. Very recent work Our proof [ 131 ] of persistence of homoclinic orbits for dissipative, driven perturbations of NLS is very geometric. While beautiful, this geometric framework can be cumbersome and somewhat tedious. We continue to develop methods which rely upon geometric intuition, but which implement the actual calculations "more mechanistically"- within an integral equation framework, together with natural pde estimates. In [ 148] we prove the persistence of an orbit homoclinic to an isolated unstable fixed point for a nonlinear Klein-Gordon equation (a simpler situation than the orbit homoclinic to a circle of fixed points treated in [ 131 ]) by replacing Melnikov methods with a Lyapunov-Schmidt framework for the pde, together with pde scattering theory. Normal forms, while beautiful when they work as in the NLS case, often depend upon conditions which are extremely difficult to verify- as, for example, in the case of the persistence of an orbit homoclinic to a periodic solution in the sine-Gordon setting. Recently Shatah and Zeng [ 168] have used integral equation estimates to replace the normal form argument. They also have extended our NLS results [ 131 ] to include unbounded dissipative perturbations such as diffusion. They accomplished this extension by replacing our "fiber" representation of the stable manifold with long-time, integral equation estimates. Such improvements in the methods, while technical, are essential for the development of general procedures to establish qualitative results, valid globally in time, for p d e ' s - such as the persistence of homoclinic orbits for pde's. Another set of related questions concerns persistent tori, and persistence of associated periodic and quasi-periodic solutions, for Hamiltonian perturbations of integrable systems. This well studied "KAM" behavior in finite dimensional dynamical systems has recently been extended to infinite dimensional pde settings. While we will not describe these extensions in this review, we do note several representative references: [ 114,115,40,20-22,25, 13,17,48,185,54]. An important example is the persistence of the sine-Gordon "breather". The sine-Gordon equation on the whole line ( - c ~ < x < +cx~) has exact solutions which are periodic in
The nonlinear SchrOdinger equation
631
time, exponentially localized in space, and which can be viewed as nonlinear bound states which consist of two solitons. The question of the survival of such temporally periodic solutions to small Hamiltonian perturbations is known as the "persistence of the breather". For perturbations which do not depend upon derivatives of the field, the breather does not persist [166,167,14]. Rather it decays extremely slowly, generating radiation as it decays at a rate which is exponentially small in the perturbation parameter. The work of Segur and Kruskal [ 166,167] uses formal "asymptotics beyond all orders" [ 165] to capture this decay rate, while that of [ 14] proves that the breather does not persist with mathematical arguments which begin from formulas of "soliton perturbation theory" [ 146]. This persistence problem provides one example of the important interactions between solitary waves and radiation in nonintegrable situations. (See [173,174,30] for others.)
5. Spatiotemporal chaos 5.1. Intuition In Section 4, we have discussed the existence and nature of temporal chaos which consists of spatially coherent localized waves which dance chaotically in time. As Figure 4 clearly indicates, these waves are very regular in space. Their time series at location x, {q (x, t) Yt }, appears to be statistically well correlated to the time series at location y =/:x, {q(y, t) Vt}. On the other hand, waves of dispersive turbulence should behave chaotically in both space and time. At least the time series {q(x, t) Vt} and {q(y, t) u should become statistically independent as the distance from x to y increases. Intuitively, this independence might be achieved by increasing the size e of the spatial domain. The numerical data shown in Section 4 was for small spatial domains, with only one instability and only one solitary wave under even, periodic boundary conditions. Recall that the number of instabilities, and hence the number of solitary waves present in the spatial domain, scales linearly with e. Moreover, with an increasing number of linearly unstable modes, there is, correspondingly, an increasingly large number of distinct classes of spatial excitations in the form many types of quasi-solitons- standing waves, waves traveling to the left and right, bound states which are quasiperiodic in time, etc. Therefore, increasing ~ will place more, and more complex, solitary wave structures into the spatial domain, and should decorrelate in space. Moreover, relaxing even symmetry enlarges the number of spatial locations at which these solitary waves can reside (from a discrete set to the continuum). (See [ 1] for fascinating effects which result from relaxing even symmetry.) Indeed, this decorrelation is seen in our NLS numerical experiments [35,34], provided the constraint of even symmetry is removed. And, similar phenomena occur much more widely than just for near-integrable waves. For example, a similar scenario occurs in studies of purely spatially chaotic, stationary waves [7,80], for which the temporal access of all of these stationary states remains to be fully addressed [41 ]. Specifically, we will describe spatiotemporal chaos for the driven, damped NLS equation,
iqt + qxx + 2lql2q = -iotq +/-'e i(~215
(5.1)
D. Cai et al.
632
Fig. 8. Evolution of system (5.1) with c~= 0.004, F = 0.144, 09- 1. The initial condition q = c + eexp(i27rx/e), c = 0.8, e = 2 • 10-5 . Plotted here is ]q(x, t)l. Left panel: Temporal chaos in the presence of one linearly unstable mode, e = 6.4; Right panel: Spatiotemporal chaos in the presence of two linearly unstable modes, ~ = 9.6.
with periodic boundary conditions,
q(x + g,) = q(x),
(5.2)
where ~ is the system length, and co and y are the driving frequency and phase, respectively. The damping coefficient ot and the driving strength F will be small. A natural question: Given a temporally chaotic solution of the perturbed NLS equation, how large a spatial domain, or how many instabilities, is required for effective decorrelation in space? An example with only one instability is shown in Figure 8 (left panel), while one with two instabilities in Figure 8 (right panel). Clearly, the two figures display drastically different spatial patterns. Before investigating such questions further, we need first to formulate a precise definition of the concept of spatiotemporal chaos.
5.2. A definition of spatiotemporal chaos There have been many definitions proposed to capture the essence of spatiotemporal chaos [41 ]. We prefer a "working definition" which includes two points: (i) A temporally chaotic wave q(x, t), (ii) for which the time series {q(x, t) gt} and {q(y, t) Yt} become statistically independent as the distance from x to y increases. For a definition, we must make precise the meanings of "temporal chaos" and "statistical independence". For temporal chaos we will accept any common definition, such as a bounded attractor with positive Lyapunov exponents. Statistical independence is often estimated through the decay of the two-point correlation function:
C(x - y) -~ lim T--,~T-To
[(q(x, t ) -
(q))(~(y, t) - ( ~ ) ) ] dt,
(5.3)
The nonlinear Schr6dinger equation
633
where (.) denotes the temporal mean, and where we have assumed translational invariance of the system. However, the vanishing of the two-point correlation function is only a necessary condition for statistical independence; thus, we prefer to base the definition upon
mutual information.
For two stochastic variables U and V, with probability density functions p(u) and p(v), respectively, and with joint probability density function p(u, v), the mutual information between these two variables U and V is defined as [ 16] 2-(U, V) = f du dv p(u, v) log
p(u, v) p(u)p(v)
(5.4)
In this application of spatiotemporal chaos, the probability distributions will be generated by the chaotic time series:
px(q)" {q(x, t) Vt} py(q): {q(y, t) Vt} Px,,.(q, r): {[q(x, t), r(y, t)] Yt}, where r(y, t) = q(y, t). Intuitively, px(q) dq is the fraction of time that q(x, .) ~ (q, q + dq), etc. Thus, we define the mutual information between points x and y by
Z(x, y) --
f
dq dr px.~.(q, r) log
px.~.(q,r) px(q)pr(r)
(5.5)
In terms of this mutual information between spatial points, we arrive at our WORKING DEFINITION. A wave q (x, t) is spatiotemporally chaotic if (1) q(x, t) is a temporally chaotic orbit (for example, as characterized by positive Lyapunov exponents); (2) its mutual information between two spatial points, Z(x, y), decays exponentially for large separatons, i.e., as Ix - Yl >> 0. It is well known that temporal chaos signifies a loss of information in time. (This loss of temporal information can be quantified by a positive Kolmogorov-Sinai entropy, which in turn can be estimated by the sum of positive Lyapunov exponents.) It is our view that a key feature of spatial chaos is a similar loss of information, but over space. Mutual information provides a natural measure. First, mutual information is closely related to entropy [ 16]: 2-(x, y) = R ( x ) + ~ ( y ) - R ( x , y),
where H(.) denotes the entropy. Here, H(x) is the entropy of q (x, t) at the space point x, and H(x, y) is the total entropy of q (x, t) and q (y, t) between the two spatial points. This relation shows that the mutual information Z(q(x, t), q(y, t)) measures the shared information between the two spatial points (x, y).
634
D. C a i et al.
Mutual information more faithfully captures the notion of statistical independence than does the two-point correlation, since the vanishing of mutual information is a necessary and sufficient condition for statistical independence. (The factorization of the complete infinite hierarchy of correlation functions to all orders is required for statistical independence - not just the factorization of two point correlations.) In addition, unlike the correlation functions, mutual information is invariant under invertible coordinate transformations. Thus, it provides an intrinsic description of the information propagated under the chaotic dynamics. Unfortunately, the numerical computation of mutual information is far more involved than that of correlation functions. However, we stress the conceptual advantage of mutual information over correlation functions since it renders a unified picture of chaos in time and space - spatiotemporal chaos giving rise to a loss of information in both time and space. 5.3. Information propagation in linear stochastic dynamics Before turning to the discussion of mutual information for chaotic NLS waves, we develop some intuition about the behavior of mutual information for several distinct classes of linear waves. In particular, we describe examples which illustrate very distinct behavior for the propagation of information in space for diffusive, wave, and dispersive systems. We need the mutual information between two random variables (X, Y), each individually normal with means m x, my and variances a 2 and %,, 2 respectively, and whose joint probability density is Gaussian 1 2zrcrxcrv(1 - p2)1/2
p ( x , y) -
• exp
{
1
2(1 - p2)
mx)(y
Ox
Ox
fly
Here p is the correlation coefficient, i.e., p = Cov(x, y)/(Crx~v). In this case, definition (5.4) becomes Zf (X, Y) --
_
F
oo
d x d y p ( x , y)
__1 ln(1-p
2
{
- - x ln(1 - p
/02. /92
m
l,
2
o. x
(5.6)
).
First, consider diffusion dynamics: ut - Duxx = f ( t ) g ( x ) ,
[(xmx2 1
- o o < x < +oo,
The nonlinear SchrOdinger equation
635
where f (t) is a Gaussian white noise with zero mean and a-correlation: ( f (t)) = O,
(s(,)/(,'))
=
where (..-) denotes an average over noise. As any linear transformation of a Gaussian process remains a Gaussian process, the solution t
u(x, t) --
L
[
1
~/4zc D(t - t') exp - 4 D ( t
x2 ] -t')
f (t') dt'
is a Gaussian process, whose correlation can be easily written as
(u(x, , ) u ( x ' , , ) ) -
-4rc----D
Ei( 't -t
'
where Ei is the exponential-integral function Ei(z) -- -
f
OG,
s - l e -s ds
for z < 0,
and where X
@ X t2
~-\ g-6 )" Therefore, according to Equation (5.6), the mutual information between u(x, t) and u(x', t) in the case of diffusion is
z(x,x')- - ~ 1l n ( 1--
Ei2(-~/t) IEi(-~l/t)Ei(-~2/t)l
) '
in which ~1 = x 2 / ( 2 D ) and ~2 = x ' 2 / ( 2 D ) . For a fixed time t and a fixed x' 5~ 0, we have C (x', t)
(5.7)
x
for large x, i.e., x >> ( 2 D t ) 1/2 and Ixl >> [x'l. Here C ( x ' , t) is a positive constant depending on x' and t. Equation (5.7) shows that, in the case o f diffusion, the mutual information decays with a p o w e r law in space. Now we contrast this result with that for wave dynamics: ut - ux = f (t)6(x),
- e ~ < x < +e~,
where f (t) is again Gaussian white noise. Since the solution is u(x, t) -- f (t + x),
D. Cai et al.
636
for x and t within the "light cone" such that - t ~< x ~< 0, we have
-x'). Thus, in the wave case, the mutual information between u(x, t) and u(x', t) for x and t in the light cone is
z(x,x,)_{o,~ , x#x', x = x'.
(5.8)
(Note that the correlation coefficient p = 1 for x = x' by definition.) Therefore, in the wave case, spatially distinct points do not share any information when driven by Gaussian white noise which is 6 correlated in time. If the noise is Gaussian but with a finite correlation function in time,
It-r t'l) '
(f(t)f(t')}-~,exp
(5.9)
then the mutual information between u(x, t) and u(x', t) becomes
Z(x,x')---~ln
1
[l_exp(_21x-x'l
r
)]"
(5.10)
At large distances, Ix - x'l >> r / 2 , the mutual information decays exponentially in space, i.e.,
Z ( x , x ' ) ~,exp - 2 I x -r x ' l ) "
(5.11)
Note that the equal-time two-point correlation function for the wave is
C ( x , x ' ) - (u(x, t)u(x', t)} ~ e x p ( - I x - x'l
(5.12)
Therefore, in this case, the lengthscale of the spatial decay of the correlation function is two times that of the mutual information. Numerical simulations have observed values of this ratio which are close to 2, even for nonlinear systems [ 192,159]. For linear Schr6dinger dispersive waves, i.e.,
iut + Uxx = f (t)6(x),
- o o < x < +c~,
where f ( t ) is real Gaussian white noise, it can also be shown that the mutual information between u(x, t) and u(x', t) is
Z(x,x,)_ { o,oc, xx#x' -- x". That is, the information is not shared between any spatially distinct points.
(5.13)
The nonlinear SchrSdinger equation
637
These discussions show clearly that the propagation of information in space depends distinctly on the class of linear pde. Moreover, for linear Gaussian processes, these calculations illustrate the sufficiency of two-point correlations to compute mutual informations. In contrast, for the information propagation in the situation of spatially extended deterministic nonlinear dynamics, mutual information, in general, requires a full knowledge of joint probability distributions - and not just the two-point correlation functions [ 183].
5.4. Numerical measurements of spatiotemporal chaos for NLS waves Now we return to chaotic NLS waves (5.1), and use mutual information to establish the existence of spatiotemporal chaos. First, we calculate numerically the spatial correlation function C(x) (Equation (5.3)). Figure 9 (left panel) shows the dependence of the correlation function C (x) on the system length. For g -- 6.4, which corresponds to the one linearly unstable mode, clearly, the whole system is correlated. This is intuitively consistent with what one would conclude by observing the spatial structures of Figure 8, since, for the most times of the evolution, there is only one quasi-soliton in space. When the system size is increased so that there are higher numbers of linearly unstable modes present, Figure 9 (left panel) shows that their correlation functions rapidly vanish. Therefore, the system becomes increasingly decorrelated, indicating an onset of spatiotemporal chaos. As shown in the inset of Figure 9 (left panel), the correlation at the half system length as a function of displays a clear transition around the threshold above which the second linearly unstable mode enters (see Equation (3.12)). According to our definition of spatiotemporal chaos, we use mutual information to further corroborate the preceding results. Figure 9 (right panel) summarizes the mutual information as a function of the distance x between any two points in space for both one and two linearly unstable modes, which corresponds to the cases in the left and right panel of Figure 8, respectively. For one linearly unstable mode the mutual information remains nonzero
lO
\
1.4
~
1.2 1.0 S"
~
,.
o.o
/ ~ _ a - _
10~ , ',, ',,
~
0.8
L:9.6 10"
'
•
5
~:
0.6
\
0.4 0.2
',, \ / !
"
"
~~\"~'X~L ....
'\\
lO-~
00
\. L=9.6
0.0 -0.2
, 0.5
1.0 x
1.5
2.0
L=6.4
""'--...~ ......
0.0
011
0.2
x/L
0.3
0.4
0.5
0.0.000
O.10
0.20
x/L
0.30
0.40
0.50
Fig. 9. Numerical measurements. Left panel: Dependence of the correlation C(x) on the system size L. Inset: Transition of C(L/2) around L t h - - 2rr/c (dashed line) (cf. Equation (3.12)). Right panel: Mutual information Z(x). Fine line: one linearly unstable mode; Dotted line: two linearly unstable modes, as also shown in the inset on the linear-log scale (the straight line is a fit to an exponential form).
D. Cai et al.
638
across the system, signifying no sufficient loss of information over the whole system, while it vanishes rapidly for the case of two linearly unstable mode. It can be further determined that this decay is exponential as shown in the inset of Figure 9 (right panel); that is,
(x)
2-(x) --+ exp -~-
for large x
(5.14)
with a decay length ~ ~ 0.30. As solitons are phase-locked to the external driver, we anticipate that the driving frequency co controls this decay length, i.e., the soliton's frequency determines its spatial width, the coherence length in space. These results establish that spatiotemporal chaos exists for NLS waves, with the transition from temporal chaos to spatiotemporal chaos occurring at the system size at which a second instability arises. Only two instabilities seem to be required. Spatiotemporal chaos in such small systems is somewhat unexpected, as the prevalent belief in the physical literature requires very large systems with many unstable modes [41,89,82,57,58,170,137,200, 172,38,112,91,176,39]. (See, however, the recent work [80].) Although only two instabilities are required for spatiotemporal chaos, our most recent results indicate that many (i.e., spatial period very large) are required to ensure the coarsegrained field behaves statistically (and universally) as a Gaussian process.
6. Descriptions of the chaotic state Given a chaotic state, one seeks ways to describe and to understand it. For temporal chaos, dynamical systems theory has provided a framework and some concepts, including: "strange" attractors, horseshoes and symbol dynamics, Lyapunov exponents, different dimensions, and universal routes to chaos - as well as more statistical descriptions of the attractor, including invariant measures and entropy. The application of some of these concepts to temporally chaotic dispersive waves is described in the survey [ 149]. For spatiotemporal chaos much less is known, and we believe that statistical representation will be essential for its description. For waves which occur in nature, such as waves on the surface of the ocean, statistical behavior and properties in the mean become far more important than individual trajectories. Wave spectra are observable, and modelling these with deterministic initial-boundary problems seems unnatural and would be irrelevant. Spatiotemporal chaotic waves call for statistical descriptions. In this section, we briefly describe three such statistical theories- (i) invariant measures of equilibrium statistical mechanics, (ii) weak-turbulence theories, and (iii) effective stochastic dynamics.
6.1. Equilibrium statistical mechanics Nonlinear dispersive waves are frequently related to conservative mechanical systems. The Toda lattice and the sine-Gordon equation (as a continuum limit of coupled pendula) provide two examples. Equilibrium statistical mechanics is the traditional description of conservative mechanical systems with a large number of degrees of freedom; hence, it provides a natural starting point for a statistical description of conservative waves.
The nonlinear Schr6dinger equation
639
We view the 1-D NLS equation under periodic boundary conditions,
iqt -- qxx - 2g(qO)q, q(x, t) = q(x + g., t), as a Hamiltonian system
3H
iqt= 6q' with Hamiltonian
H ( q ) = fo e [Iqx[ 2 -k- glql 4] dx. Statistical mechanics of NLS is the study of the Gibbs measure based upon this Hamiltonian. This measure, on the space of continuous functions, can be written formally in terms of the Hamiltonian H as
1
exp{-/~H[u(.), v(.)]}Du(.)Dv(.),
(6.1)
where q(x) = u(x) + iv(x), and where the normalization constant (partition function) Z is defined as
Z -- f c
(0.~)
exp{-~H[u(.), v(-)] } Du(.)Dr(.).
Here C(0, ~) denotes the space of continuous, periodic functions in which [u(x), v(x)] reside, and the positive parameter fl denotes inverse temperature. For those not familiar with function space integrals, reference [ 102] provides an intuitive introduction which emphasizes a view of the integral over functions as a "sum over paths", and which makes concrete the notation Du(.), etc. In the defocusing (g > 0) case, it is relatively easy to give precise meaning to these formal expressions by writing
1
exp{-/~H[u(.), v(.)] } Du(.)Dr(.) --
-lexp -fig Z
{ fo
_-- _1 exp - f i g Z
[u 2 +
v2]2dx exp - f l
[u 2 + v 2 2 dx
j
[u 2 + v2]dx
Dwu(.) Dwv(.),
where Dwu(.) Dwv(.) denotes unnormalized Wiener measure:
{Jo
Du, u(.) Du, v(.) =exp - f l
}
[u 2 + V2x]dx Du(.)Dv(.).
Du(.)Dv(.) (6.2)
640
D. Cai et al.
With this observation, Wiener measure can be used to give a precise mathematical definition of the Gibbs measure for the defocusing case [19,23,141-143]. Wiener measure is supported on functions which are continuous, but no-where differentiable. As such, these functions are "very rough"; for example, the energy space H 1 has Wiener measure zero. For the Gibbs measure to be invariant, the NLS equation must be well-posed for such rough data. Clearly, energy arguments will not work for such rough data. Resolving these existence issues requires delicate and interesting mathematical arguments [ 19,23,141-143], which establish that the Gibbs measure exists and is invariant for the defocusing NLS case. The focusing (g < 0) case is more subtle, as the formal expressions show. (Note, for g < 0 the integrand (6.2) is unbounded.) In one-dimension, control can be achieved by constraining with the L 2 norm (which is also invariant). The goal of an equilibrium statistical mechanics of waves is to use these invariant measures to extract statistical properties of typical wave configurations. Rose, Leibowitz, and Speer introduced these NLS measures, studied them both numerically and in "mean field", and posed some fascinating problems [127,128]. In particular, they conjectured a phase transition in the focusing case which involves solitons vs radiation- at high temperature (small/3), the typical configuration would consist in radiation, while at low temperature, it would consist in a gas of solitons. While recent evidence seems against this conjecture, the extraction of qualitative information about the statistical ensemble of waves from the Gibbs measure remains open mathematically. (There is a related calculation for the discrete Toda lattice which estimates the expected number of solitons as a function of the temperature, and which agrees well with numerical observations [155,154,138,33,179].) There are many fascinating issues, including: the thermodynamic (~ ~ cx~) limit, together with the possibility of the coupling constant g --+ c~; the extraction of spectra and other mean properties of the waves from the measure; the use of the measure or its moments to produce effective integration schemes, constrained by partial data [37]; "fluctuationdissipation theorems" for ensembles of waves; macroscopic transport [73]; the application of these ideas to vortex filaments of fluid mechanics [ 134] (which can be described by NLS and its perturbations [ 103,104,107,105,106]). Although these issues are fascinating mathematically, the fact that the measure is concentrated on rough functions remains troublesome physically. Typically, dissipation dominates at small scales - exactly where this rough spatial behavior appears. And this description of waves as a conservative Hamiltonian system neglects dissipation. Descriptions which focus upon steady fluxes of excitations between the different spatial scales, rather than upon equilibrium behavior, may be more relevant for ensembles of nonlinear waves. One such description is "weak turbulence theory".
6.2. W e a k - t u r b u l e n c e t h e o r i e s In order to understand dynamics of spatially extended, nonlinear wave systems, an important issue one must first address is the identification of fundamental excitations. In an appropriate coordinate system the fundamental excitations often acquire a very simple representation, such as a soliton in the nonlinear spectral representation, which is far simpler
The nonlinear Schr6dinger equation
641
and more compact than its Fourier (plane wave) representation. Conceptually, these natural representations often allow us to capture the main dynamics of the system. The small residual interactions amongst the fundamental excitations can be then treated perturbatively. The theoretical power, as we demonstrated in preceding chapters, of the spectral representation toward understanding temporal chaos precisely lies in the fact that solitonic excitations and their interactions are the most important features in this dynamics. In this section we present another important theoretical formalism for nonlinear phenome n a - namely, weak-turbulence theories. The dynamical emphasis of this formalism is resonant wave-wave interactions. One origin of this formalism was a description of nonlinear phenomena in plasmas [ 198,197,196], such as the processes of modulational instabilities, decay instabilities, and wave couplings. It turns out that a Hamiltonian formalism, together with normal form transformations, provides a natural language for weak-turbulence, in which dissipative effects can be taken into account as small corrections. The waves described by weak-turbulence must be of small amplitude; and the weak-turbulence formalism fails to capture strongly nonlinear effects such as wave collapse and self-focusing. This is to be expected since these nonlinear phenomena involve a different kind of coherent degrees of freedom than simple resonant wave interactions. Weak-turbulence theories provide a statistical description for the kinetic evolution of correlation functions which describe wave spectra. In the derivation of these kinetic equations, a random phase approximation (i.e., a Gaussian assumption), as well as some technical assumptions, are invoked for the interacting waves, resulting in a certain closure scheme for the weak-turbulence description of the dynamics. These are strong assumptions which are difficult to verify, and often are not valid. Therefore, the applicability of weak-turbulence closures should be carefully examined. We will describe an explicit toy model which was introduced [ 136] to illustrate the hazards of a blind application of the weak-turbulence formalism. We will also describe a heuristic closure scheme [ 136] which provides an accurate representation of a wave spectrum observed numerically for this model problem. 6.2.1. Formalism. If there is only one type of wave dispersion co(k) present in a nonlinear medium, one can describe the waves in the absence of dissipation by the complex amplitude ak satisfying the Hamiltonian system
.Oak 1
~
Ot
6H =
~Dk
.
(6.3)
We consider Hamiltonians of the form H -- H0 + Hint,
(6.4)
where
- f co(k)akDkdk
(6.5)
is the Hamiltonian of the linearized problem, and Hint is the perturbation describing the interaction amongst those degrees of freedom represented by ak. Generally, Hint can be
642
D. Cai et al.
expressed in terms of power series in ak, and ilk, such as Hint - -
f
(Pkk,k2{tkak, ak2 + /3kk,k2akik,~k2)6(k -- kl - k 2 ) d k d k l dk2
+ f(Qkk,k2akak, ak2 + Okk,k2akak, ik2)6(k + kl + k 2 ) d k d k l dk2 +
f
Rkk~kzk3akak~ak2ak36(k + kl -- k2 - k 3 ) d k d k l dkzdk3.
(6.6)
The dispersion co(k) determines the nature of wave interaction and its resulting turbulence properties. For example, if the following condition holds, co(k) = co(kl) + co(k2),
(6.7)
k = kl + k 2 , for some k, the wave interaction leads to the resonant interaction of the waves a k l a n d ak2 into ak~+k2- This situation is called three-wave resonance. If (i) Equation (6.7) does not have solutions, and if (ii) the following condition holds instead, co(kl) + co(k2) = co(k3) + co(k4),
(6.8)
kl + k 2 = k3 q-k4, then the four-wave resonance is responsible for the main energy transfer between weak dispersive waves. In this instance, it can be easily shown that a normal form transformation will place the Hamiltonian (6.4) in the form
.-f
f co(k )ak{tk dk + ] Skk~k2k3akak~ak2ak36(k + kl - k2 - k 3 ) d k d k l dk2 dk3. ,1
(6.9)
This is the general Hamiltonian system with four-wave resonances. Clearly, the "particle" number
N-fnkdk-fn~do~,
(6.10)
is conserved, where nk = [ak [2 and no, = nk dk/dco. In addition, the kinetic energy
E- f o n dk- f onodo is an important quantity.
(6.11)
The nonlinear SchrOdinger equation
643
6.2.2. Direct and inverse cascades. These two conserved quantities under the four-wave resonance have direct implication on the flux of energy and wave number in the co space, when the system is forced at some wave numbers and damped at others. This can be easily seen from a global balance of "particles" and energy. Consider an idealized situation in which N particles are being created per unit time at frequency co, and N_ and N+ particles are being removed at frequencies co_ and co+. In a steady state, conservation of particles and energy leads to N--
N_ + N+,
coN -- co_N_ + co+N+.
Solving for N_ and N+, we have N_ --
N (co+ - c o ) co+
N+ =
N(co - co_) co+
,
(6.12)
.
(6.13)
-- co_
-- co_
Since N_, N+ > 0, co has to lie between co_ and co+. Without loss of generality, we choose co_ < co < co+. As neither N_, N+ nor co_ N_, co+ N+ vanish, there are fluxes of particles and energy in both directions from co. If co_ is near zero, there will be almost no energy removal at the low frequencies, and the energy will flow upward from co to co+, resulting in an upward (direct) cascade of energy from the low frequencies to the high ones. If co+ is very large, Equation (6.13) shows that the number of particles removed at co+ will be very small, and the particles have to flow from co to co_, creating a downward (inverse) cascade of particle numbers. As a consequence, if the dissipation takes place only at frequencies near zero and at very high values, there is an "inertial" range in which the energy flows upward from its source to the sink at the high frequencies, whilst the particles flow downward from their source to the sink at the low frequencies. As we will see below, these cascades provide a physical basis for understanding (nonequilibrium) steady state solutions in weak-turbulence theories. 6.2.3. A simple model. To further illustrate detailed aspects (such as the closure issues and wave spectra) of weak-turbulence via four-wave resonances, we describe a model system introduced by Majda et al. [ 136]. The governing equation of the system is
io,
+ 10xl ,,.(110xl ,,4 l'lo,
(6.14)
The equation has two parameters ot > 0. For fl -- 0, a standard cubic nonlinearity results. The parameter/3 is introduced to control the nonlinearity. The parameter ot controls the dispersion relation co(k) - [ k [ ~, which, for o~ < 1, leads to resonance quartets in this one-dimensional model.
(6.15)
D. Cai et al.
644
The essence of weak turbulence theory is a statistical description of weakly nonlinear dispersive waves in terms of a closed, kinetic equation for certain two-point spectral functions. Starting with the equation of motion for system (6.14) in the Fourier space, and introducing Gaussian randomness through the initial conditions, one has
f
nt(k,t) =
2im(akl ak2hk3~k)
ikll~/4lk2l~/4lk3l~/4lkl~/4
6(kl + k2 - k3 - k)dkl dk2 dk3 (6.16)
for the two-point function
n(k, t) -(ak(t){tk(t)).
(6.17)
The evolution of the four-point functions depends on six-point functions. Under a Gaussian random phase approximation, and the assumption that 0
ot (ak,ak2{tk3{tk) ~ O, one obtains Im(aklak2~k3~k) ~ --27r •
n2r/3nk
-~- n l n 3 n k
-- nln2nk
-- nln2n3
[kl [fi/4lk2[fi/4[k3]fl/4lk[ ~/4
6 (O91 -+- 092 - - 093 - - O ) ) ,
(6.18)
where n2 = n(k2, t), etc. Using this closure condition, one can close Equation (6.16) to arrive at
hk -- 4re
f
nln2n3nk ( 1 k 1 [klk2k3k[~/2 -~ n3 •
6(Wl
-~- 092 - - 093 - -
1 1) n2 nl co)6(kl + k 2 - k3 - k) dkl dk2 dk3.
(6.19)
Equation (6.19) is the kinetic equation for n(k, t). 6.2.4. Zakharov's solutions. time-independent solutions n(co) = c ,
For an angular averaged kinetic Equation (6.19), the trivial
(6.20)
and C
n(co) ------, O9
(6.21)
The nonlinear SchrOdinger equation
645
correspond to equipartition of particle number and energy, respectively. Using a conformal mapping, Zakharov showed that the angular averaged kinetic equations often possess additional (Kolmogorov) power law solutions of the form [ 195] c
nK(0)) = ~ ,
(6.22)
(2)9/
for y ~ 0, or 1, which describes the spectra for the cascades in nonequilibrium situations. These solutions are intimately related to fluxes of particles and energy in 0) or k space as we discussed previously [195]. For system (6.14), it can be shown that for ot = 1/2
n x (0)) = c 0)4/3fi-5/3,
i.e.,
n/((k) = clkl 2/3fi-5/6
for the inverse cascade, and nK(0))
=C0)
4/3/~-2,
i.e.,
nK(k) = clkl 2/3r
for the direct cascade. 6.2.5. Numerical results for the model. In [ 136], numerical experiments were carried out for the direct cascade of energy from long waves to short waves. For ot = 1/2 and/3 = 1, the Kolmogorov spectrum from the weak-turbulence theory is n/~ ~ Ik1-1/3. However, numerically this spectrum was not observed. Instead, the numerical measurements yielded a much steeper spectrum n "-~ Ik[ -3/4 over large inertial ranges. Moreover, in contrast to the weak-turbulence prediction of the existence of a spectral bifurcation at a critical 13, the experiment displayed no spectral bifurcations. Careful postprocessing of the numerical simulations shows clearly that the Gaussian approximation is satisfied. Therefore, one would expect that the weak-turbulence theory should work. It appears that the failure of the weak-turbulence theory prediction for this one dimensional model can be traced to the breakdown of the closure condition (6.18). Using the insight derived from the numerical results, a new closure condition was proposed [136]:
Im(ak, ak2ctk3gtk4) ~ C
(nln2n3n4) 1/2 0)1 -Jr- 0)2 - - 0)3 - - 0)4
(6.23)
for the evolution of the two-point function n(k). The scaling of the Kolmogorov spectrum under this new closure is found to be in excellent agreement with numerical scalings for the model. In general, to find a good closure scheme is a difficult problem. As is demonstrated by our example, although weak-turbulence theories provide a systematic approach to the closure problem, the validity of the closure thus obtained still needs to be carefully tested for the applicability of the weak-turbulence theories. Finally it is worth noting that the weak-turbulence theory for system (6.14) is insensitive to the sign of the nonlinear term. Recalling that modulational instabilities and solitons crucially depend on this sign, one appreciates that weak turbulence, when valid, must be restricted to nonlinear waves of very small amplitudes.
646
D. Cai et al.
6.3. Effective stochastic dynamics In weak-turbulence theories, one uses two-point correlations (6.17) to characterize the spectra of wave-wave interactions over many scales. However, one may also be interested in a "macroscopic" description of the longest waves in the spatiotemporal chaotic system. The long waves in the deterministic chaotic system will be effectively stochastic. One anticipates that their dynamical evolution will be described by a stochastic equation in which the chaotic waves on intermediate spatial scales will act as both a "source of a random stirring force" on the longest waves, and a "sink for the dissipation" of the longest waves. That is, long-wave instabilities create chaotic shorter waves, which, in turn, act as an "active heat bath" which causes the random forcing and dissipation of the longest waves. In contrast to weak-turbulence theory (which can be viewed as a stochastic description of the active heat bath), "effective stochastic dynamics" depends critically on properties of the nonlinearity because it demands the presence of long-wave instabilities. For example focusing, rather than defocusing, nonlinearity is required. Recently, this issue of "non-equilibrium fluctuation-dissipation theorems" has received renewed interest in statistical physics, particularly in the connection between the hydrodynamic limit of the Kuramoto-Sivashinsky equation and the Burgers-KPZ universality class [200,193,172,38,32,100,93]. The formalism used to describe the coarse-grained effective stochastic dynamics is a natural extension to a dissipative system of the Zwanzig-Mori projection formalism for a Hamiltonian system in thermal equilibrium [182]. When applied to the Kuramoto-Sivashinsky model in the spatiotemporal chaotic regime, a noisy Burgers equation results as the effective long-range, large-time dynamics [200,193,172,38,32]. There are two questions: (i) Does an effective stochastic dynamics exist which provides a macroscopic description of long waves in a chaotic deterministic system? (ii) Can a closure theory be developed which derives the effective stochastic equations from the original deterministic system? Most of the work in the literature assumes an affirmative answer to the first question, and develops formal closure schemes to address the second. Often, these heuristic arguments are based on ideas from renormalization group methodology [76,193,194], and are very difficult to convert into precise asymptotic analyses. In this article, we address the first question with numerical experiments designed to validate some necessary conditions for the existence of an effective stochastic dynamics. In [35,34] we extend the methods of reference [200] to perturbed NLS equation (5.1), focusing upon which aspects of chaoticity are necessary for the validity of its effective stochastic dynamics. Specifically, is spatiotemporal chaos necessary or is temporal chaos sufficient for an effective stochastic dynamics? Surprisingly, we find that numerical tests of necessary conditions for an effective stochastic dynamics for the perturbed NLS equation require only temporal chaos, in contrast to the Kuramoto-Sivashinsky equation for which spatiotemporal chaos is believed to play a crucial role for the validity of the effective stochastic dynamics [200,193,172,38,32]. But effective stochastic dynamics fails for quasi-periodic behavior. -
647
The nonlinear Schr6dinger equation
The representation of perturbed NLS equation (5. l) in the Fourier space is 2 iak = (k 2 - i o t ) a k - --~ ~-~aqapDp+q_l( 4-
eFe/(~~
(6.24)
q,P
where
ak-
fo g
q ( x ) e ikx dx
with k = 27rm/g, m being an integer. The effective dynamics is concerned with the dynamics for ak in the long wavelength limit. In other words, the aim is to construct an effective dynamics for the macroscopic observable 1
(1(x) -- -~ Z
ake-ikx'
]k[ 0) and F ( w ) -- ~ w + w 2, c~ >~ O, satisfy these assumptions. In the former case, when u is real F ( u 2) is a double-well function of u with equal depth wells at u - +u0" in the latter case u0 - 0 and it is a single-well function.
684
P.C. Fife
The L2-gradient flow for (9) is (12)
ut -- A u - p B u - f (u),
where f (u) - 2 u U ( l u l 2 ) . We assume this has a global solution u ( t ) E D ( A ) A Lvc, t >~ O, given any initial condition in that space. Our main goal will be to investigate the possibility of stable stationary nonconstant solutions of (12). In fact, we deal mainly with global minimizers of E. We shall call a minimizer ~b nontrivial if 4~ 7~ const. In view of (A3) and F ~> 0, a sufficient condition for this is that E[4~] < 0, since constants have E ~> 0. 2.2.1. The m i n i m i z e r s a n d their properties. A
M(p,k)
We define
A
(13)
= A(k) - pB(k),
an increasing function of p, and p * ( X ) - inf{p" M ( p , km) > 2 F ' ( u 2) ---- t' for some m},
(14)
where 2zrm
km = ~ ,
m-1,2
X
.....
(15) A
We have 0 < p* 0 0 < c~, for if p* (X) - 0, then A (km) - 0 for some m, contradicting (A3). If u0 > 0, then y = 0 in (14). Note the following alternate characterization of p* in that case: A
A(km)
P* 0 0 -- inf ~ A
m O(km) A
when u0 > 0. A
(16)
A
In fact, M (p, kin) -- - B (km) [p - A (km) / B (km) ], and this is positive for some value of m exactly when p is greater than p* as defined by (16). Below, we speak of functions a e ikx . The solution set of (12) and the set of minimizers of E are invariant under rotation, i.e., multiplication by a constant e i~ . Therefore we may, and shall, always assume that a is real and nonnegative. In this sense, our minimizers are really equivalence classes. The following theorem provides existence and nonexistence results for nontrivial minimizers, as well as several properties enjoyed by them. See the explanatory comments after the statement of the theorem. THEOREM 1. (a) For each X > O, p > p* (X), there exists a nontrivial global m i n i m i z e r o f E o f the f o r m ae ikx f o r s o m e a -- a ( p , X) > uo, k -- k ( p , X) > O. I f uo > O, this is also true f o r p -- p*" then a ( p * ( X ) , X) -- u0.
Pattern formation in gradient systems
685
(b) For p < p*(k), the only global minimizers are constants with ]u] = u0. (c) The functions a and k satisfy lim a ( p , X ) = o o , p--~ cx:~
lim
a(p,L)=uo.
(17)
pSp*(k)
(d) If A
A
inf B (k) < B (k)
f o r each k
(~8)
(the former could be - o o ) , then limp~o~ k(p, ~.) = oo. (e) Suppose F' (w) < cw r f o r some r > O, c > O, and all large enough w. Then f o r some C>0, a(p, Jk) >~ Cp 1/2r
(19)
f o r sufficiently large p. (f) Let p ~ ( ~ O) -- the critical (least) value o f p beyond which M ( p , k) > Of o r some k (unrestricted by (15)), and f o r p > p~, let fc(p) > 0 be the least positive value of k at which M (p, k) is maximized (neither Po nor k depend on X). For p > Po, 0 < k (p) = lim inf k (p, X) ~< lim sup k (p, X) < oo )~---->o c
(20)
k----> o e
and u0 ~< l i m i n f a ( p , Jk) ~< l i m s u p a ( p , Jk) < oe. )~--+ o o
(21)
)~--+ o o
Commentary. (1) Items (a) and (b) are threshold results, showing that nontrivial global minimizers exist for p > p*(~.) (>~ p*(X) in the case u0 > 0) and not for p < P*0~). Moreover, these minimizers are given explicitly. In Lemma 2 below, it will be shown that in typical cases, these are the only global minimizers, although other stable stationary solutions may exist, as shown in Section 2.3. One can prove that these minimizers satisfy a somewhat stronger stability statement in d2
the case ~ F (u 2) > 0 for u -- a. Namely, if 4~ is a minimizer of this type and e is any positive number, then for some 6(e) > 0, any solution u(t) with Ilu(0) - 4~11 < 6 satisfies Ilu(t) - ell < e for all t > 0. Here the norm is in L 2. We omit the details. (2) Items (c), (d), and (e) give information about the amplitude and minimal period of the global minimizers which will have been constructed. The amplitude a grows without bound as p -+ e~, and under a reasonable additional assumption (18) the wavenumber k does as well. Thus the minimal wavelength shrinks. The relation (19) gives a more precise lower bound for the rate of growth of the amplitude. For the case F ( w ) -- (w - u2) 2, we have a >~ O(p 1/2) as p -+ c~. It should be noted that this lower bound depends only on the function F. It was shown in [65] that such a bound may sometimes be improved by taking into consideration the operators A and B as well. In fact in the case of the fourth
686
P.C. Fife
order problem given in Section 3.6.2 below and this same convex function F, those authors established that the amplitude grows at least at the rate O(p) as p --+ c~. As p approaches its threshold value p* from above, the amplitude approaches the position u0 of F's well. The behavior of the wavelength for p near p* can also easily be obtained. (3) Item (f) explores the effect on the global minimizer when the size of the basic period interval becomes very large. We conclude that there is no important effect. The wavenumber k and amplitude a are bounded above and below independently of )~. An examination of the proof will show, in fact, that in typical cases they approach finite limits as ~ ~ c~. This means that the structure of stationary patterns is little affected by the domain size ~, when the latter is large. (4) It will be shown in Lemma 1 below that when u0 > 0 the family of exponential minimizers which exist for p ~> p* can be continued as stationary solutions of (12) of exponential type for an interval of values of p < p* as well; however the extended solutions are not global minimizers. The question of their stability is considered in Section 2.3; see also the comment following Lemma 1 below. 2.2.2. Proofs LEMMA 1. Let Um,a(X) = a e ikmx, a > 0 real km given by (15). There exist functions a*(p,)~) and pl(~) ~< p*()~) such that f o r some m, Um,a is a stationary solution of (12) if P > Pl and a = a*. Also a* > uo if p > p* ()~), a* (p*,)~) = uo, and a* (cx~,)~) = cx~.
PROOF. Substituting this function into (12), we obtain the following necessary and sufficient condition for it to be a solution: either a = 0 or M(p, km)-2F'(a2)--O.
(22)
Let Fc(w), w > u 2, be the greatest monotone increasing function with Fc(w) /y for some m, which is true if and only if p ~> p* ()~). Moreover, the quantity 2 F ' (a 2) takes on all negative values in some interval [-c~, 0] as a 2 ranges from 0 to u 2. Let Pl ()~) be such that for each p E (pl, p*), M ( p , km) E (-or, O) for some m(p). There exist exponential solutions for this range of p as well. (Some of them satisfy a linear stability criterion; but generally their minimal wavelength is )~ itself, so they are almost constant when )~ is large.) This proves the existence part of the lemma. The stated properties of a* follow from (22). D
Pattern formation in gradient systems
687
LEMMA 2. When p >~p*(~.), there exists a finite integer m - - m * ( p , ~.) which maximizes M(p, km). It can be chosen so that limp,z,, m*(p, k) -- m0 < oo. lf p >~ p*()v) and a satisfies (22) with m = m* and (23), then Um*.a is a global minimizer of E. PROOF. It follows from (A2) (10) that for any fixed p, M(p, k) < 0 for k large enough. Therefore when maximizing M (p, kin) over m, we need consider only a finite number of values of m, namely those for which M > 0. This establishes the first two statements of the lemma. We shall show that Um*,a is a global minimizer of E when a ~> u0. In the following, we drop the subscripts on u, let v be any function in D(A) A Lee, and calculate E[u + v]. We find that
{A(u + v), u + v}-- (Au, u) + 2~(Au, v) + (Av, v),
(24)
and the same for B. We have chosen the amplitude a so that (23) holds, which means that
F(a 2 -+- Wl) > / F ( a 2) -+- w l F ' ( a 2) for all
1,01.
Choosing
1/31 - -
2~(u~) + Ivl 2, we note that a 2 -Jr-wl - lu
-+-
13]2. Hence
f0 v F(lu + vl 2) dx
fo
/> k F ( a 2) + 2 F ' ( a 2)
3~(uf~)dx + F ' ( a 2)
fo
Ivl 2 dx.
(25)
Combining these expressions, we obtain
E[u + v] >~ E[u] - 2.qt>,0 for all v. We may express Ely] -- - 89(Lv, v), where L is the linear self-adjoint operator given by
Lv--Av-pBv-2F'(a2)v. Therefore E will be positive, as desired, if all eigenvalues # of L are nonpositive. The eigenvalue equation is
Av-pBv-2F'(a2)v--#v.
(28)
688
P. C. Fife
This may be solved by Fourier expansion over the period interval (0, X). It therefore suffices to look for solutions of the form v - e ikmx, km given by (15). We obtain the set of eigenvalues # m = m (,o, k m ) - 2
F' (a 2)
m
--
1
2,
(29)
We subtract (22) with k - km* from this to obtain #m
-
-
-
M (p, km ) - M (p , km* ).
(30)
Therefore since m = m* was chosen to maximize M ( p , km), we obtain from (30) that all eigenvalues satisfy #~~ E[u] for all admissible v. Thus Ua,m* is a global minimizer. It will be the only one if E[u + v] > E[u] for v 7~ 0. This can be verified in case m* is unique and F ( w ) is strictly convex. [3 REMARK. Values of m which do not maximize M ( p , km) generate stationary solutions which may be stable but not global minimizers. This issue is taken up in Section 2.3. LEMMA 3. / f p ~< p*, then E[u] >~0
(31)
f o r any u in the domain o f E. Moreover if equality holds in (31), then necessarily [ul = u0. I f equality holds and p < p*, then u - const. PROOF. By (9), (27), E[u] >~ E0[u]. The form E0 is positive if all the eigenvalues of - A + p B are nonnegative, i.e., all the eigenvalues of A - p B are ~< 0. These latter eigenvalues can be found by using exponential functions, and are given by (29) with the last term set equal to zero, i.e., #m = M ( p , km). But when p ~< p*, this is nonpositive for all m. This completes the proof of the first statement. If equality holds in (31), the last term in (9) vanishes, so that F(lu] 2) = 0, hence lul 2 - u 2. If moreover p < p*, then also (Au, u) = 0, so that u = const, by (A3). D PROOF OF THEOREM 1. Parts (a) and (c) follow directly from Lemmas 1 and 2, and part (b) from L e m m a 3. Consider now part (d). Recall that our construction in L e m m a 2 has m - m*, so that M ( p , km*) is maximal. If the assertion in (d) were not true, then there would exist a sequence Pn --+ ec and an integer rh with m*(pn,X) = rn for all n. Since m* maximizes M, we have that for everAy m > rhAandevery n, M (Pn, km) 0. Letting n --+ ec gives us then a contradiction, which proves item (d). Part (e): From (22) and (23) and the hypothesis, we have
M (p, kin*) < ca 2r. Now let m be any fixed number > 0. We have M ( p , kin*) >/M(p, km) =-- C! -Jr C2p, where the Ci depend on km and C2 = 89 > 0. Thus a 2r > C'l + C~p. This yields (19). Consider now part (f). Let I (p) be the bounded closed interval on the k-axis where
m ( p , k ) >~0. For all )~, the maximization of M (p, kin) over m is the maximization over a discrete set of values of k in I (p), and that in the maximization of M ( p , k) is taken over all of I (p). Therefore the lim sup and liminf appearing in (20) lie in I, and in fact liminfz~oc kin. = ~: > 0. This proves (20). Finally, (21) follows from this and (22). This completes the proof of the theorem. D 2.3. Linear stability of solutions which are not minimizers We now return to the linear stability analysis of solutions uo - a e ikx of (12). The procedure in [69] applies. It is with regard to solutions on the entire real line, rather than on a finite period interval, as in our context. Recall (5), (6) for the perturbation 05. In our case, the equation for 05 takes the form
r
A (d# eikX ) e -ikx _ p B (r eikX ) e-ikx _ 24)F'(a 2) - 4a23tc/) F" (a2).
(32)
Seeking solutions of this equation in the form (6) with scalar Ci, we find the following pair of equations for C l and C2"
Cl[o- - M ( p , k + g) + 2F' + 2 a 2 F ''] + 4 a 2 F " C 2 --0, C2[o- - M ( p , k - ~) 4- 2F' -Jr 2 a 2 F ''] -+-4a2F"C1 --0,
(33)
where the functions F', F " are evaluated at a 2. The determinant condition for the existence of nontrivial solutions leads to the following second order equation for o-, where we set M+ (k, g.) = m ( p , k) - m ( p , k -t- g.) and 27 (k, e) - M+ (k, e) + M_ (k, g)" o-2 + o-(4a2F '' + 27) + M + M _ + 2 a 2 F " Z - - 0 .
(34)
Here we have used (22). The larger of the real parts of the two roots of this equation is ~< 0 for all g iff
4a2F"(a2)+r>~O
and
-2a2F"Z 0 for all ~ # 0 (it is always the case that r > 0 for large ~). This is true if the concave hull of the graph of the function M (p, k) touches the graph itself at the chosen point k and the concavity is strict there. Then from (35) we obtain a sufficient condition for stability, in terms the following function R ( p , k) (which might be 4-c,z), defined simply in terms of the function M and number k: - ( M ( p , k) - M ( p , k + g ) ) ( M ( p , k) - M ( p , k - g~)) R (p, k) -- sup e:/:o ( m ( p , k) - m ( p , k 4- ~)) 4- ( m ( p , k) - m ( p , k - g,))
(36)
Then we have the following linear stability criterion in the case Z'(k, () > 0 f o r all ~#0: R (p, k) ~< 2a 2 F" (a2).
(37)
When it is not true that r > 0 for all ~ # 0, then we revert to the above more general criterion (35). The criterion is easily modified to handle problems in a finite period interval A, as we were doing. Then the numbers ~ are restricted to be multiples of 27r/A. All the above continues to hold. In the case of the global minimizers we have been considering, k has been taken to maximize the function M ( p , k) under the restriction that k be of the form (15), and we also have F" (a 2) >/0. Therefore the quotient in (36) is negative and the condition (37) clearly holds, as expected. But (37) also indicates that other solutions, not global minimizers, may be stable as well. In fact when F " > 0, values of k which are near but not at the maximizer for M satisfy the condition.
3. Nonconserved gradient flows for real-valued functions The foregoing theory falls short in relevance to many applied problems, because it allows complex-valued minimizers; moreover the class of nonlinearities F is restricted to functions of lu] 2 alone and the theory is one-dimensional. We may extend the theory to partially remove these difficulties while losing some completeness of our conclusions, by (1) restricting the class of admissible functions competing for the minimization to realvalued functions, (2) allowing more general nonlinearities, and (3) extending the theory to higher space dimensions (although if A and B are isotropic, our criteria for the existence of patterns differ little from those in the 1-D case). In the N-dimensional context, the operators A and B act on A-periodic functions u (x), where now x - - ( X l , x 2 . . . . . xu) and A - (Al, A2 . . . . . A N ) . The assumptions (A1) to (A3) of Section 2.2 are still assumed, with the obvious notational changes: k = (kl, k2 . . . . . kN), e ikx means e ik'x, and the limit in (10) is taken as Ikl ~ ~ . Let Dr be the set of real-valued functions in D(A).
Pattern formation in gradient systems
691
We restrict u to be real-valued, and consider now energy functionals of the form 1 P (Bu u)+ E [u ] -- - -~ ( a u , u ) + -~ ,
1 L H(u)dx
(38)
-~1
where the C 1 real function H has a minimum of 0 at some value u -- u0 (if it attains this minimum at more than one point, let u0 be the maximal one). The integral in (38) is the integral over one period cell A, and IA[ is the measure of that cell. We also assume that H grows superquadratically as lul ~ ec: lim
[u I--> cx~
H(u)
= cx~.
U2
(39)
The evolution equation (8) now takes the form (40)
ut -- A u - p B u - H ' ( u ) ,
and the minimizers ~p of E in Dr n L ~ are stable k-periodic solutions of (41)
A O - pBcp - H ' (4)) = O.
In the real valued case we do not know the minimizers explicitly, and this diminishes the completeness of our results. For one thing, the linear stability analysis of Section 2.3 is not applicable to patterns which are not sinusoidal, as they will be in this section; we therefore restrict attention completely to global minimizers of the energy. A second point is that the existence of minimizers is not always clear. We shall assume that for each p, k there is ~pP 6 7P~ (A) n L oc such that min E[u]uEZ),.(A)NL~
E[qSP].
(42)
In general condition (42) might be difficult to verify without making additional assumptions on the operators A, B. On the other hand in special cases proving (42) usually involves checking that E is coercive and weakly lower semicontinuous. The condition (39) will be relevant to establishing coercivity. We illustrate this by considering case (b) near the beginning of Section 2.2:
Remark.
A u - Uxx,
Bu = G,
u - u,
H ( u ) -- F ( u 2 ) ,
resulting in the equation (85) below. Here G 9 u represents convolution of u with a nonnegative kernel with unit integral. The corresponding energy is
l ffo
lfokl~ lu ,2[ d x
E [ u ] -- -s
l
+ ~
F(lul
k 4 dx
.
G(y)lu(x
+ y)-
u(x)[ 2 d x d y (43)
P.C. Fife
692
We set XD to be the characteristic function of the set D. For each K > 0 there exist constants C l (K, p), C2 (p) such that
ffo
4
G(y)lu(x + y) - u(y)l 2 dx dy
~< CI (p, K) q-
C2(p)
fo
U2(X)X{u2>K} dx.
(44)
On the other hand
f0 F(u 2)/>f0
(45)
F(u2)X{u2>K}.
Using the fact that F ' ( w ) ~ ec as w --+ ec we conclude that for sufficiently large K we have [F(u 2) - uZ]g{uZ>K} > 0 and thus combining (44) and (45) we see that there exists a constant C3 (K, p) such that
1Efo 1 lu 2I o -2
E[u] >~ --s
C3(K, P)
]
(46)
and thus E is coercive in H 1. From the embedding C a (0, X) ~ H l (0, X), ot E [0, 1) we conclude that E is weakly 1 lower semicontinuous with respect to Hper(0, )~) norm, where H~er(0, X) denotes the space of ,k-periodic H 1 functions. From (46) and the weak lower semicontinuity we can verify (42) by a fairly standard argument. We observe that the minimizers are in fact smooth.
3.1. Dependence of minimizers on p Associated with the function H , we define two other functions H* and H0. In accordance with our periodicity constraint, we consider (as in (15)) wavenumber vectors km _
(kt?l, ,km~ ~2~,.
.
mN .,k u )
(47)
with
mi ki
27cmi --
Xi
(48) '
not all of the mi vanishing. Let ]m] be the number of integers i ~< N with mi ~ O. When k is of this form, it is clear that the integral
l IAI
(49) l
Pattern formation in gradient systems
693
depends only on a, b, and ]m I, i.e., how many indexes m i vanish. This is because when mi 7~ O, the integrand is nontrivially periodic in xi of period h i / m i . For example if all the mi except one vanish (]m[-- 1), we have that the integral on the left of (49) is equal to 1 fo' H(acos(2yrml/)~lxl) + b)dxi = fo H(acos(Zrrx) + b)dx, and if [ml = 2, it is
fo'f'
H (a cos(2yrXl) COS(2yrx2) + b) dxl dx2.
In any case, the function H* is even in a and has a minimum of 0, attained at (a, b) =
(0, u0). We now set
Ho(a, [m[)= minH*(a,b, Im[), b
(50)
with the minimum attained at a value b = b*(a, ]ml). Let
M*([m]) = inf 4H0(a, Im[) a>0
a2
'
(51)
which is either attained at a positive value a* of a (finite because of the superquadratic growth of H ) or approached as a ---> 0 (in which case we set a* = 0). It is important to emphasize that M* depends only on the nonlinearity H and ]m l. For example, in the case H(u) = (1 - U2) 2 and N = 1, it turns out [43] that M* = 0.899. Essentially this same calculation, leading to the same sufficient condition for the existence of stable patterns, was done in the context of the equation (75) below by Mizel, Peletier, and Troy [65]. Recalling the definition (47) of k m, we define r
-- inf{p: M ( p , k m) > M * ( [ m ] ) f o r some m}
(52)
and p~) ( L ) = inf{p: M ( p , k m) > 0 for some m}.
(53)
Note that if H(u) -- F(u 2) and u0 > 0, the number p~ coincides with p* given by (14). THEOREM 2. There exists a number pc(X) 6 [p(~(k), fi(k)] such that: (a) for each p < Pc, there exists no nontrivial global minimizer of the functional E (38)
in the class of real-valued functions; (b) for each p > Pc,, there exists such a nontrivial real global minimizer ckp of E in
Dr N L ~ with E[4) p] < 0.
(54)
694
P. C. Fife
Let E l ( p ) - - l ( a * ) 2 [ M ( p , km) - M*(Iml)], where m is chosen and fixed so that M ( p , k m) > 0 for some p = Po. Since M is an increasing function of p, this will be true for all p > Po as well. For a > 0, let
max(uH'(u)-2H(u)).
P ( a ) -- lul~oc P ( a ) = ec; in fact if u H ' ( u ) - 2 H ( u ) were bounded for large u by some number K, then integrating the inequality u H f (u) - 2 H (u) < K would imply that H ( u ) / u 2 is bounded. THEOREM 3.
For p > Pc, let qbp be a minimizer o f E, and a ( p ) = max 14>p (x)l. Then (55)
P ( a ( p ) ) >~--2El(p).
Since - E l increases linearly with p and P ( a ) increases to ec as a --+ ~x~, we see that (55) provides a lower bound on the amplitude which grows toward eo as p ~ eo. 1. Assume H ( u ) = clu[ r + O([u[ r - i ) as u --+ ex~, r > 2, and that the corresponding differentiated relation H ' ( u ) = rculu] r-2 + O(]u] r-2) holds. Then
COROLLARY
a ( p ) ~ Cfi 1/r
(56)
f o r large p, where C depends only on the function H. COROLLARY 2.
In the case H ( u ) = (1
-
U2) 2, we have, f o r p > Pc,
maxl~bP(x) [ ~> 1.
(57)
PROOF OF THEOREM 2. Any global minimizer ~bp with E[~ p] < 0 must be nontrivial, because constants have E ~> 0. To emphasize dependence on p, we write E[u] = Ep[u]. Let Pc - - i n f { p" E p has a minimizer 4>p with E p [~bp] < 0 }. If Pc < ~ , the assertion (b) holds by virtue of this definition and the fact that Ep[cb] is a decreasing function of p. Now suppose that for some number P0 < Pc, Epo has a nontrivial global minimizer ~bp0. Then Epo[dpPo] = 0, since the minimum of Ep for every p is always nonpositive. Since 4~p0 is nontrivial, we have from Assumption (A3) that (Bob po, 4~p0) < 0. Hence Ep[cb po ] is strictly decreasing in p, so that E p[cbpo] < 0 for p0 < p < pc. The global minimizers for these values of p must be nontrivial, contradicting the definition of Pc. Thus part (a) follows. We show that Pc lies in the indicated interval. If p < Po,9 M ( p , k m ) < 0 for all m, so that the operator A - p B is negative definite, and since H ( u ) > 0, it follows from (38) that E[u] >~ 0 for all u, hence by our definition of Pc, P ~ Po"
Pattern formation in gradient systems
695
To show that pc ~ P, we choose a = a* (51) and b = b*(a*) (50) to obtain from (38), (51 ) that E a*Hcos(k7/x)+b*
]
---~
l(a*)2[M(p , km) - M* ([rnl)]
ft. Hence the minimizer CP for such p has negative energy and must be nontrivial, so that p >~ Pc. [-] PROOF O F THEOREM 3. Since CP is a minimizer, it satisfies (41). Take the scalar product of (41) with CP:
1 L ,PH'(,P)dx
((A - pB)c~ p , 4)p) - -~[
=0,
(59)
so that
1 L (ckPH'(cp p) -
2 E [ r p] + ~-~
Note from (58) that El (p) = E[a* E[ck p ] 0, f . > 0, fv < O,
for iu[ < M and all v,
g. > 0 gv < 0
for all u, v.
(77)
Thus an increase in the amount of u serves to enhance both reactions when u is not too large, namely OuR < M. Commonly the behavior of at least the function f is different for larger values of ]u i, it being such as to effectively limit the growth of u. This results in a limitation on the amplitudes of the patterns. Apparently the first stability analysis of large amplitude patterns for systems in this class was given in [39]. It was for functions f and g of a special type. The following system of FitzHugh-Nagumo type is an example of an activator-inhibitor system (space, time, and the variable v have been scaled to produce a system with few parameters): ut - D V Z u - f (u) - p ( v - u), 6 l ) t - - V 2 1 ) -Jr- u -
1).
(78)
704
P C. Fife
Here the function f (u) is decreasing in a finite interval u 6 I, and an increasing function outside of I. In fact, l i m l u l ~ f ' ( u ) / l u l = ec. If D is an O(1) quantity, the parameter 1/e is a measure of the relative magnitude of the diffusivity of v, as well as of the strength of the v-reaction. The parameter p represents a measure of the strength of v's inhibition and u's activation of the first reaction. 3.7.1. Fast kinetics. Consider, for simplicity, bounded solutions of (78) in the entire space R 3, in the limit e --+ 0. The second equation can be solved for v in terms of u: v
-
-
( - V 2 + 1) -1 u - G . u ,
(79)
where G is Green's function for the operator (--V 2 -~- 1). With this, (78) becomes ut = D V 2 u - p ( G * u - u) - f (u),
(80)
which has the form of (40) with A u = DV2u,
Bu = G 9u - u
(81)
and H ( u ) -- fo ~ f ( s ) d s . The function H has the properties required in Section 3, namely superquadratic growth in lul. If f ( u ) = 2 u F ' ( u 2) for a function F ( w ) with superlinear growth, it fits into the framework of Section 2.2. Models of this sort were presented in [72,80,48]. Models bearing some similarity were studied in [71,55,12]. We consider one space dimension, as entirely analogous results hold for higher ones. In 1D, the convolution involves an integral over the whole line with the Green's function kernel G ( y ) -- 89e -lyl, and the function u is periodic with period ~. It is easily checked that G 9 u is then also periodic with the same period. The operator B in fact satisfies all the requirements of our theory with G ( k ) given below. We have A
AA(k)
--
- O k
2 ,
M ( p , k) - - D k 2 +
_k 2 B'(k) -- G(k) - 1 - 1 + k 2 ~ 0, pk-~2
l + k 2"
(82) (83)
The function M attains positive values only for p > D, which is the critical number identified as l i m z ~ p*()~) (14), or the number p~ in Theorem l(f) in the case f ( u ) 2u F'(u2), u0 > 0. All the conclusions of Theorems 2-6 hold (and Theorem 1 as well, if f ( u ) = -2uF'(]ul2)).
P a t t e r n f o r m a t i o n in g r a d i e n t s y s t e m s
3.8.
Related
705
models
The Green's function G ( x ) used in the previous Section 3.7.1 is just one example of a class of influence functions G in (80) for which our conclusions are valid. We simply require
G(x)
F
~ O,
G(x)
1.
dx-
(84)
OC~
Then B u - - G 9 u - u is a negative self-adjoint operator. If A u - - Uxx, then these two operators satisfy our assumptions throughout, and our conclusions hold regarding patterns for the equation u t - - U.rx -
p(G
* u -
u) -
(85)
f (u).
A complementary model is obtained when p < 0. Although such an equation is still a gradient flow, when f is bistable it has traveling wave solutions defined on the whole line. In [8], the existence, uniqueness, and some stability results were obtained for such waves, with and without the second derivative term on the right of (85) (but with p < 0). This paper was nominally for the equation without the x-derivative, but the results clearly hold with it present. If it is absent, an interesting feature of the traveling waves is that their profile may be discontinuous when the velocity is zero. Finally, we consider another sort of evolution, when A and B are both convolution operators. Let G + (y) be two functions, each satisfying (84). We consider the evolution equation ut
If we set
-- G +
, u - u - p
G -- G + -
ut -- G 9 u -
pG-,
lu -
(G- *
u-
u)
-
f(u).
(86)
then this equation takes the form f(u),
where I - - f-~vc G ( y ) d y . We therefore have an integrodifferential equation similar to that in [8,23,24,45], but with a kernel which can change sign. Identifying A u - - G + 9 u - u , B u - - G - 9 u - u , we obtain (1). Also AA(k)
-- G+ (k) - 1,
B'(k) - G - (k) - 1.
(87)
Although assumptions (A1) and (A3) are satisfied, (A2) is not; in fact A ( k ) / B ( k ) --+ 1. The following theorem applies to a general situation suggested by this example. We consider two cases (one may apply at one value of p > p*()~), and the other at a different value of p): (i) M ( p , k i n ) has a maximum with respect to m at a finite value m * ( p ) . (ii) M ( p , k ) approaches its supremum with respect to k at k = oc.
706
P. C. Fife
THEOREM 7. Assume that (A1) and (A3) hold, and A
lim k~
A(k)
= ~.
(88)
B (k)
If p is such that case (i) holds, then the applicable conclusions of Theorem 1 hold for that p. On the other hand if case (ii) holds, then there is no global minimizer of exponential form for that value of p. However there is a minimizing sequence of exact stationary solutions of (12) of exponential form, along which the wavenumbers approach cx~. The energy levels of these solutions approach a finite limit, as do their amplitudes. The proof is along the lines of the foregoing, and will be omitted. If M(p, k) approaches its supremum only at k = cx~, there exist infinite sequences {km} (see (15)) and am, defined for sufficiently large m, which satisfy (22). They generate exponential solutions whose amplitudes approach a solution of (22) with k = o 0. In order to learn more about the way w approaches k, let us formally linearize Equation ( 1.2) about k. If v (y, s) "-- w (y, s) - k, then 1
Vs -- - V ( p V v ) + v + f (v), P
f (v) "-- ~k v2 -+- g(v),
(1.3)
g(v) - - O ( v 3)
as v --+ 0
and v --+ 0 uniformly on compact sets in y. Let Lp2 denote the space of functions 4} such that
fiRN di)2 (y)p(y) dy < cx~. The linear operator s
1
"-- - V ( p V v ) + v P
(1.4)
defines a self-adjoint operator in L 2p with eigenvalues 1, l, 0, _ l , _ plicities are 1, N,m "-- 89
1, ... , whose multi+ 1) . . . . . respectively. Denote by {e+} u+l the eigenfunc-
tions of s that correspond to positive eigenvalues and similarly {e?}j%l
denotes
the eigen-
functions that correspond to the eigenvalue zero and {el }f~-l eigenfunctions corresponding to negative eigenvalues. (The eigenfunctions are in fact Hermite polynomials.) Let us decompose Lp2 as
Lp2
_
X +
G X0 OX-,
where X +, X ~ , X _ are the closed subspaces spanned b y / ,e j + , N] j+=Il ' {e? } m j - - l ' { e l } j _-- 1' respectively. The presence of a nontrivial null space for the operator s namely the space X ~ suggests the use of center manifold theory. A center manifold for the equilibrium v = 0, which we will denote by W c (0), is defined to be a locally invariant manifold whose tangent space at v = 0 is equal to X ~ Unfortunately, a standard center manifold theory (cf. [75], for example) does not apply. The nonlinear term does not have the required properties in the natural function spaces (cf. [20, Section 3] for a more detailed explanation). Nonetheless, the center manifold theory can work as a good guiding principle. To see this, let us expand v as N+ 1
v(y,s) -- Z
m
cx~
flJ(s)ef (Y) + E ~ J ( s ) e ? (y) + E F j ( s ) e - f (y)
j--1
= "v+ + vo + v - .
j=l
j=l
(1.5)
M. Fila and H. Matano
728
Here v +, v ~ v - are nothing else than the projection of v onto the subspaces X +, X ~ X - , respectively. As we are looking at solutions of (1.3) that tend to zero as s --+ ~:~, the initial data should lie on the center-stable manifold of v = 0. Now, according to the center manifold theory (pretending that it applies), almost all trajectories that converge to v = 0 are asymptotically tangential to W e (0), or, in other words,
to+l+l,
I-o(1
~
,ss--,
and the rate of the convergence is of the polynomial order in 1/s, while some exceptional trajectories (namely those lying on the stable manifold) converge to 0 exponentially fast and satisfy
Io+l+l
~
This formal observation suggests that the following estimate holds "generically":
as s --+ c~ j=l
j--1
(1.6)
j=l
and that there are some exceptional solutions that converge to 0 exponentially fast and in which Y~j~--1 y2 will be the dominant term. To see how the solutions converge to 0, we plug the form (1.6) into Equation (1.3), to obtain ordinary differential equations which govern the motion of the neutral modes c~j:
-
+ o
,
j = 1, 2 . . . . . m,
(1.7)
i=l
where Jrj0 denotes the orthogonal projection onto e j0 and v ~ is as in (1.5) If N = 1 then the eigenvalues of E are simple which makes the analysis easier. The normalized eigenfunction corresponding to the eigenvalue 0 is
e~ c(1
C:---
27/.4 '
and the solution of (1.7) where m = 1 can be written as
Otl = - ~
2"cps + ~
-s
"
Although the center manifold theory does not apply rigorously, the above formal observations suggested by the center manifold theory have been confirmed by Filippas and Kohn [20] by using analyses based on the special structure of Equation (1.1). Among other
Blow-up in nonlinear heat equations
729
things they have established in [20, Theorem A] that either v --+ 0 exponentially fast as s ~ ec or else for any e > 0 there is so such that N+ 1
cx~
!17 2
j=l
j=l
j=l
holds for s ~> so. They have also justified the "equation on the center manifold" (1.7) for solutions of (1.3) that do not tend to zero exponentially. As a consequence, they have been able to show that for any C > 0 there is so such that sup v(y, s) - ~ lyl~so,
(1.8)
provided v does not tend to zero exponentially fast. Restated in the original variables, (1.8) becomes
(T - t ) l / ( P - l ) u ( x , t) = k +
2pl ln(T -t)l
(1-
Ix - al e )
2(T - t )
+ o(]ln(T - t ) ] - l )
as t ~ T, uniformly in parabolas Ix - al 2 ~< C ( T - t). A link between center manifold analysis and the geometry of the blow-up set was also established in [20] by showing that the center of scaling a is an isolated blow-up point provided N = 1 and v does not tend to zero exponentially. This result is weaker than a result from [ 12] which says that if N = 1 blow-up always occurs at isolated points. On the other hand, unlike in [ 12], the argument in [20] is not intrinsically one-dimensional. The refined asymptotics (1.8) was generalized to higher space dimension in [57] and [4] under the assumption of radial symmetry of u. The nonsymmetric case was considered in [21 ] where it was also established that (1.7) can be put in a remarkably simple form and then solved explicitly. Concerning the refined asymptotics of u, it was shown in [21 ] that
(T - t ) l / ( P - l ) u ( x , t )
k
-- k + 2 p l l n ( T _ t)l
(
trA0-
(x - a)T A~- t) - a ) )
+o(]ln(r- t)l-' ) as t --+ T, uniformly in parabolas ]x - a] 2 ~< C ( T - t) provided v does not decay exponentially fast. Here
AO-- Q
IN-j 0
0 )
Oj
Q-
for some j E {0, 1 . . . . . N - 1 }, where Q is an orthonormal matrix, IN-j is the (N - j ) x (N - j ) identity matrix and 0j is the j x j zero matrix. A similar result was proved independently in [77] where refined asymptotics is obtained also for the case when v decays exponentially fast.
M. Fila a n d H. M a t a n o
730
We remark that in the work of Herrero and Vel~izquez on blow-up profiles [40-47,7679], dynamical systems ideas also play an important role. We shall discuss some of their results in Section 1.5.
1.3. Example 2 In this section we discuss a result from [22] on blow-up of solutions of the equation
Ut -- AU 4-IUIP-IU
in ]1~N X (0, T), p > 1,
(1.9)
where U is a function from ]1~N X (0, T) to Ii~M. Introducing the similarity variables as before, we obtain a vector-valued analogue of (1.2) which now has a continuum of stationary points, namely an (M - 1)-dimensional sphere of radius k which will be denoted by S~4-1 . Since the scaling properties and the gradient structure are the same as in the scalar case, many arguments from [36,37] apply. In particular, it follows from [36,37] that if N = 1 or p < (3N + 8 ) / ( 3 N - 4) then inf
[
inf
Iw(y, s ) - Wor ~ o
WoES~4-1 JRN
] W ( y , s ) - W o l 2 p(y)dy--+O
as s --+ cx~,
and
WoESf f -I
a S S ---> OO,
uniformly for lY[ < C. The question addressed in [22] is: Does W(y, s) approach a single point on S~4-1 ? Assume for simplicity that M = 2 and introduce complex notation as in [22]. The following parametrization plays a crucial role in [22]:
W(y, s) - e i~
(V(y, s) + k),
where 69 (s) is obtained for each s by
f l w ( y s) ,
-
ei~ 2p -
min
(-) E S l
here ]. I represents the complex modulus. If E is defined as in (1.4) and
0
s
0)
then V satisfies the equation
V~ = LV + N(V),
f
Iw(y,s)-e~C~
P~
731
Blow-up in nonlinear heat equations
where 1 2 4- Or2 4- gi (V), -s 1 N(V) := (~kk v 2 4- ~-~v
-- O(vi 4- k) 4- g2(V) ) T
with Ig i (V )l ~ CIVI 3 for i - 1,2 and IVI small. The operator L is self-adjoint on (L2) 2 2l , ' " ., and the analysis of the neutral modes is a key step in
with eigenvalues 1, 89
[22] in order to prove that there is Woc E S~4-1 such that W ( y , s) --+ W~c
as s --+ oc,
uniformly for [Yl < C. More precisely, Filippas and Merle show in [22] that V decays exponentially or with the order s - l as s ~ cx). The smallness of V than implies the convergence of tO(s) as s --+ cxz, from which the convergence W --+ W~c follows. The assumption (3N - 4)p < 3N 4- 8 guarantees that W is bounded.
1.4. E x a m p l e 3 In this section we consider the problem ut = A u + e u, u =O,
x E S-2, t E (O, T ) , x E OY2, t E (O, T ) ,
u (., 0) = u0,
x E S2,
where s C ]t~ N is a bounded domain with smooth boundary. In the case s = R N, a study as described in Section 1.2 was performed in [4,57] for radial solutions. Here we focus our attention on the approach of [6,7] which leads to an elegant center manifold analysis in a different manner. Instead of the similarity variables, Bressan introduces the ignition variables r = - ln(T - t),
r/=
x-b ~/-(T
- t) l n ( T - t)
V(~, r) = u ( x , t) 4- ln(T - t),
here b is a blow-up point and T < 1 is the blow-up time. This change of variables was first suggested in [ 15,28]. Performing the ignition change of variables we obtain
V~=-~
V(~,r) = -r V(r/, - l n T )
O . VV +e v-l+-
1(,
r
- . VV + AV 2
ifb4-r/~/re -rEOf2,
-- u o ( b + r / ~ / - T l n T ) + l n T .
)
1
--" A ( V ) + - B V r '
M. Fila and H. Matano
732
Since V is expected to stabilize as r --+ c~ to the solution
of A (V ~ ) = 0, it is natural to linearize the equation
Vr = A(V) formally around V ~ to obtain
Wr = D A ( V ~ ) W , here DA(V ~) is the differential of A at V ~ :
DA(V~)W---rI
2
. VW +
W 1 + 1012/4 .
The eigenvalues of the operator DA(V ~) in C ~ ( R N) are 1, 89 . . . . with multiplicities 1, N, 1 N (N + 1) . . . . . and, as before, the presence of a nontrivial null space suggests the use of center manifold theory. However, the domain of V (., r) depends on r, and the first order approximation is not uniformly valid. Using some delicate a priori estimates and a topological argument, it is shown in [7] that there are solutions which behave as suggested by center manifold considerations. More precisely, if ~2 is convex and b E 12 then there are solutions which blow up at b at the time T and whose final profile satisfies lim (u(x, T ) + 2 In Ix - bl - In]In Ix -
x--+b
bll -
in 8) = 0.
This asymptotic behavior is proved to be stable with respect to small perturbations of the initial conditions.
1.5. Other approaches to blow-up profiles 1.5.1. Here we describe the answer to the question as to which blow-up profiles occur for positive solutions of Equation (1.1) with N = 1. It was shown in [40] that if u blows up at x = 0, t = T and w(y, s) is as in Section 1.2 then one of the following cases occurs: (i)
w(y, s) = k,
(ii) w ( y , s ) - k - ( 4 z r ) l / 4 k
,/~p
H2(Y)+o(~)
s
a s s - - + cx~,
(iii) w(y, s) = k - Ce(1-m/2)SHm(y) +o(e (1-m/2)s) as s ~ oo, where m/> 4 is an even integer and C > 0.
Blow-up in nonlinear heat equations
733
Here Hi is the i th normalized eigenfunction of E, and the convergence in (ii) and (iii) takes j,ot place in H} (R) as well as in Clo c (Ii~) for any j >~ 1 and c~ 6 (0, 1). Herrero and Vehizquez say: "Our approach is deeply influenced by dynamical systems theory . . . " (cf. [40, p. 134]) but their proof does not follow by standard applications of semilinear parabolic theory (as developed in [39], for instance). Its elements include elaborate estimates for the heat equation, Harnack and nondegeneracy estimates as well as a new change of variables. The existence of solutions behaving as in (ii) was conjectured in [48], where (ii) was formally derived for the case p = 3 by singular perturbation techniques. Further formal analysis can be found in [28,26]. In [26], the flatter behaviors (iii) were obtained formally by the method of matched asymptotic expansions. As we mentioned before, it was shown in [20] that either w(y, s) ~ k exponentially (as s ~ ~ ) or (ii) holds. In [40,41], Herrero and Velfizquez proved also that (ii) occurs if u0 has a single maximum and that there exists an initial value u0 such that the solution behaves as in (iii) with m = 4. It was shown later in [9] that all flatter behaviors in (iii) actually occur for some initial data. The main tool in [9] is the renormalization group. In [43], the genericity of the blow-up behavior given by (ii) was established. Analogous results hold also for the exponential nonlinearity (cf. [40,44,9]) which can be treated in the same way using the methods of matched asymptotic expansions and renormalization group. Generalizations to higher space dimension can be found in [76-79]. 1.5.2.
Sign-changing blow-up solutions of the equation
ut--mu+lulP-lu
inIR N x (0, T), p >
1, ( N - 2 ) p < N + 2 ,
were studied in [16]. Let S be the set of all blow-up points. It follows from [62,63] that under some restrictions on p there exists u* E C(oc (It~u \ S) such that
u(x, t) --+ u*(x)
in Clo c as t --+ T.
There are solutions for which u* (x) -- U! (x - a) + o(x - a)
as x ~ a, U l ( x ) " - -
Splloglxll)l/(P-1) ( P _ 1)2lxl 2
and other solutions such that for some integer n ~> 2 and Cn. p > 0 one has
u*(x)-C,,,pU,,(x -a)+o(x
-a)
a s x --+ a, U,,(x) "- Ix[ -2''~(p-l),
cf. [42,78,9,63]. The main aim in [16] is to show that if/~ blows up at (x, t) - (0, T) and (i) lift(x, t)llL~ 0 such that for any u0 6 ~; the solution u blows up at the time T -- T ( u o ) at a unique point a -- a(uo), u ( x , t) >>.0 for (x, t) [ - 6 , 6] • [T - 6, t) and limu(x,t)=u*(x) t--+ T
forxr
u* (x) -- U1 (x - a) + o ( x - a)
as x -->. a.
Moreover, (a(uo), T ( u o ) ) --+ (0, T) as u0 --+ rio. The proof uses a dynamical systems approach similar to what we described in Section 1.2. It consists in showing that a behavior analogous to (1.8) is stable under perturbation of initial data. 1.5.3. Recall from Section 1.2 that a sufficient condition which guarantees the convergence w ( y , s) --+ k as s --+ cxz is: (N - 2)p < N + 2. It is natural to ask whether or not such a condition is also necessary in some sense. In [46,47], there is given an example of a positive radial solution u of (1.1) with N~>ll,
p>
N-
2x/N-
N-4-2x/N-
1
(1.10)
1
such that u blows up at t - T, x = 0 and lim sup(T - t ) l / ( P - l ) u ( t , 0) -- cx~. t/ZT
(1.11)
To indicate how (1.11) is obtained one first observes that 113"(y) :-- C p , N l y 1 - 2 ~ ( p - l )
p
p,X"
-
1 N - 2 - ~
p - 1
'
is a singular stationary solution of (1.2) if (N - 2)p > N and it is in Hlloc near y = 0 if (N - 2 ) p > N + 2. Then one shows that there exist solutions of (1.2) which converge to w* as s --+ c~ in an appropriate way. To do this one linearizes around w* by setting
q, (y, s) -
w ( y , s) - w* (y).
Then !/, satisfies (pointwise for y r 0) the equation __ 1 yVq/+ q/s -- Aq/ 2 /
+
+ N
--" a ~
+ f(ff,).
p
cP-I p,N
ly[ 2
tit
p-
1
p-1 Cp,u p-I -- Cp, N w * ( y ) - p ly12
Blow-up in nonlinear heat equations
735
To prove that ~ (s, y) --+ 0 as s ~ ec in a suitable way, a key point consists in showing that the linear operator A can be extended in a suitable self-adjoint manner. This can only be done if (1.10) holds. 1.5.4. Equation (1.1) with p ( N - 2) > N + 2 was studied in [60,61] where some results on the behavior of w ( y , s) as s ~ cx~ can be found. 1.5.5.
In [1 ], the following system in I~ N is considered ut -- A u + v p,
p ) 1,
(1.12)
ut -- A u -q- u q,
q >~ 1.
(1.13)
Positive solutions which blow up at x -- 0, t -- T are studied there. If one rescales variables as q+l
p+ I
u ( x , t) -- ( T - t) x -
y,/r
,'q ' ~ ( y , s ) ,
v ( x , t) -- ( T - t)
,'q-' O ( y , s ) ,
s -- - ln(T - t),
-t,
then one is lead to the system 1 4) s - -
A c/) -
p+l
-~ y . V c/) +
~ P
1
- q- -
'
(1.14)
q+l - - 0 -
1 Os -- A O - ~ y . V O +~b q
pq-
(1.15)
1
This system possesses the trivial solution 4~ -- ~ -----0 and the positive constant solution (4~, ~ ) = (F, y), where gp =
p+l pq
-
_ 1 I-',
I -'q
q+l pq-
1
y.
Under some assumptions on p, q it is shown in [ 1] that any nonnegative and bounded solution of (1.14) and (1.15) which is defined for all ( y , s ) E ~ U X ~ is either one of the constant solutions or satisfies otherwise
I1~(., s) -/~11 + I10(., s) - •
~
0
I1~(-, s)ll + II0(., s)ll --, 0
as s ~
-oo,
a s s -----~ o o ,
where II" II denotes the L p2 ( ] t ~ N ) _ n o r m . This Liouville-type theorem is then employed to prove the existence of solutions of (1.12) and (1.13) exhibiting a behavior near blow-up which is different from those that occur in the scalar case.
M. Fila and H. Matano
736
1.5.6. A classification of connections between equilibria of (1.2) was given in [64] for (N - 2)p < N + 2. Under this assumption, a bounded nonnegative solution of (1.2) defined for (y, s) E R N x R is one of the following: (i) w = 0 o r w = k ,
or
(ii) there exists so 6 IR such that w ( y , s) = 9(s - so), where q)(s) -- k(1 + eS) - 1 / ( p - ' ) . Note that q9 is the unique global solution (up to a translation) of (/9
p
~Os . . . . p-1
t- ~o
satisfying q) --+ k as s ~ - o o and 9 ~ 0 as s ~ cxz. This classification is used in [64] in order to obtain some optimal bounds for solutions of (1.1) at blow-up time. 1.5.7. A remarkable blow-up behavior was studied in [31,32]. There, Galaktionov and V~izquez considered the problem
ut -- Uxx + (1 + u) ln ~(1 + u),
xeR,
u(x, o) - uo(Ixl)/> o,
xEIR,
t>O,
where fl ~> 2 and u0 E L ~ (R) is nonconstant and nonincreasing in Ix l. This problem was introduced in [27] (see also the references of [73, Chapter IV]). By the results from [31,32], the blow-up behavior is governed by the first-order equation of Hamilton-Jacobi type:
Ut
I+U
+ (1 + U) lnf(1 + U).
To explain the appearance of this Hamilton-Jacobi equation one introduces the change of variable
v(x, t)"-- ln(1 + u(x, t)). Then v satisfies the equation
Vt --Vxx + Vx2 + v ~ 9 If one now rescales as O(~, r ) " - - (T
-
-
t)l/(~-l)v(~(T
Ixl
9-- ~ , (T-t)
m
-
-
t) m, t),
m
.m
[3-2 2(~ - 1)'
r "-- - ln(T - t),
Blow-up in nonlinear heat equations
737
then one arrives at the equation (9r -- .4((O) -+-e-r/(/~-l)(o~,
1
.,4(69) "-- (O~ - m~ (O~: - /3-----~
(O + (O~
Hence, the equation for 6) can be viewed as an exponentially small (as r --~ co) parabolic perturbation of the autonomous nonlinear Hamilton-Jacobi equation hT = Ah.
(1.16)
It is shown in [31,32] that there exists a solution S of the equation .A(S) = 0 such that S >~ 0, S ~ const and (O(~, r) --+ S(~)
as r --+ oo, uniformly in ~.
The proof is essentially based on a general result on w-limit sets of perturbed dynamical systems which was introduced in [30]. A certain reduced co-limit set of the HamiltonJacobi equation (1.16) is shown to be uniformly stable. This makes it then possible to pass to the limit as r --+ oc in the parabolic equation for 6) to get the convergence to the unique stationary solution of (1.16).
1.6. Another application of dynamical systems theory to a blow-up problem The study of critical exponents for parabolic problems was initiated by Fujita in his classical paper [24]. He studied Equation (1.1) and proved that every positive solution blows up in finite time if p < 1 + 2 / N while global positive solutions exist if p > 1 -4- 2/N. For surveys of a number of later extensions and generalizations we refer to [56,14]. Here we only discuss the results from [65,66] since dynamical systems theory plays a crucial role in [65]. Consider the problem
ut=ux~+lul p-iu, u (-, 0) = u0,
xeR, t>0, x 9 R,
where p > 1. For f E HJ (R), er(x) -- e x2/4, f ~_ 0, define z ( f ) "-- sup{j" there exist - oc < xi < x2 < ... < xj+l < oo with f ( x i ) f ( x i + j ) < 0 f o r i -
1,2 . . . . . j},
let
.-Is
Pk then there exists a global solution with u0 6 I7k. To explain the conditions on p, rescale the problem as follows"
v ( y , s ) "--(t + 1 ) l / ( p - l ) u ( x , t ) ,
x "-- y x / t + 1, s "-- ln(t + 1).
Then v satisfies the equation y 1 Vs - Vyy -4- ~v,, 4- ~ w p-1
-4-Ivl p - l v.
"
Let L be defined by y 1 Lq9 "= ~o~,~,+ ~Oy + " p-1 Then the j t h eigenvalue
1.j=
)~j
i0.
of L in H2 is
1
j+l
p-1
2
and )~k < 0 if and only if p > Pk. The eigenfunction corresponding to ~,j is
qgj(y) = H j ( y ) e -y2/4,
Hj is a suitable modification of the j t h Hermite polynomial and z(q)k) = k. If p > pk then the stable manifold of the trivial solution contains a function belonging to r k , which proves the global existence part of the result of [65]. Conversely, if a global solution exists it can be shown to converge to an equilibrium in Z j for some j ~< k or to the trivial solution. If p < pk then there is no equilibrium in s j ~< k, so one has
v(., s) IIv(', s)llnJ
-]'-q)j
in H~ as s --+ ec
for some j / > k + 1. This contradicts the fact that z(v(., s)) O , x ~ S2,
here I2 is a bounded domain in RN. DEFINITION 2.1. By an L l-solution of (P) on [0, T] we mean a function u 6 C([0, T]; Ll (S2)) such that f ( u ) c L l ( Q r ) , Q;r := I2 x (0, T) and the equality
[u Oltr d x -
f'f= r
uqJ, d x ds -
f'f
(uAq* + f ( u ) e P ) d x ds
holds for any 0 ~< r < t ~< T and O E C 2 (Q;r), q / = 0 on O$2 x [0, T]. By a global L l solution we mean an L l-solution which exists on [0, T] for every T > 0. Next we recall some facts about global unbounded L 1-solutions of Problem (P) with f (u) = u p and f (u) = e". For f ( u ) = u p it was shown in [70] that a global unbounded (in L ~ ) positive L lsolution exists if I2 is starshaped and ( N - 2)p ~> N + 2. We now explain the reason why such a solution exists. By the Pohozaev identity, there is no positive equilibrium. The equilibrium u = 0 is stable. If we choose an initial function u0 6 C (S-2), u0 ~> 0, u ~ 0 and denote by u(., t; ku0) the solution of (P) with u(., 0) = ku0 then
k* := sup{k > 0: u(-, t; ku0) is a global classical solution such that u(., t; ku0) --+ 0 as t --> oo } is positive and finite since for k large the solution u(-, t; ku0) blows up in finite time. Now, u(., t; k ' u 0 ) cannot be global and bounded since otherwise its w-limit set would have to contain a nonnegative equilibrium. But the only nonnegative equilibrium is zero and its domain of attraction is open in any reasonable topology. Hence u(., t; k ' u 0 ) cannot converge to zero as t --+ oo. On the other hand, if we take a sequence {k,, } such that k,, / k* then u (., t; k,,u0) is a monotone sequence of global solutions and the Monotone Convergence Theorem can be used in order to pass to the limit in a suitable weak formulation of (P) and show that u(., t; k ' u 0 ) is a global L l-solution (see [70] for more details). For a long time it had been an open problem whether or not u(., t; k ' u 0 ) is classical for all t > 0 and becomes unbounded only as t -+ oo. An answer was given in [33] in the case when S-2 = BR(O) := {x E RN: Ixl < R} and uo is radially symmetric. It is shown in [33]
740
M. Fila and H. Matano
that if (N - 2)p = N 4- 2 and u0 is radially decreasing then u(., t; )~*u0) is indeed classical for all t > 0; while for N4-2 ~,3 > "'" > ~ - 2 j + l ~
)~oo = 2 ( N
- 2),
~,2 < ~,4 < " ' " < ~-2j+2 / 7 ~,oo-
(c) For each )~ ~boo - - I n
2 ( N - 2) ~,r 2
in Clloc((0, 1]).
Next we recall a result on stability properties of equilibria. PROPOSITION B [67]. (a) q~(s) is hyperbolic if and only if X' (s) =/=O. (b) Let m(q)(s)) denote the number of negative eigenvalues of the problem
(L)
~rr+ Cr(0)-
N r
1
~r+
~(1)=0
)~e~(r ) 7t
+u~--O,
r E (0, 1),
Blow-up in nonlinear heat equations
745
I I
A2
A~
A3
A1
A
Fig. 2. Bifurcation diagram for equilibria.
with ~ = dp(s) and )~ = )~(s). Then m(dp(s)) = #{g ~ N +" ~ < s and i/(g) -- 0}. In other words, m(dp~.) = j for any j such that d@. is defined. In particular, dp~ is asymptotically stable for )~ < )~1 and it is the only stable equilibrium of (E). Finally, for the number of intersections of two equilibria the following holds: PROPOSITION C [19]. If )~ < )~l and k > j are such that 4)~ and 4)~ are both defined then
c~ - ~ has exactly j + 1 zeros in [0, 1], all of them simple. 3.3. Global solutions We shall need the following result. PROPOSITION D [19]. l f the classical solution u(]xl, t) of(E) is global, then it is uniformly bounded, that is
sup lu(r, t)l < c~. t>O, r~[O, 1] Recall that global classical solutions exist only if )~ ~ 1 and let ,k be such that 49~ exists. Then (i) for any uo > dp~, the solution of(E) with initial data uo blows up completely infinite time; (ii) for any uo < ~ , the solution of (E) with initial data uo converges to 49~ as t --+ ~ . PROOF. Part (i) follows by combining the results of [51,53]. Part (ii) can be found already in [25] (without proof). We indicate a proof of it here. By the maximum principle, the solution is global and bounded. In particular, u(., t) < 4~ for t 6 [0, c~). Therefore, u converges (as t --+ cx~)to an equilibrium 4~{ such that 4~{ ~< q~. Since 4~ is unstable from below and 4~/z ~< 4~ only if i -- 0 or i - k (cf. Proposition C), one obtains that i -- 0. D
3.4. Classical connections For problem (E) it is rather easy to establish the existence of classical connecting orbits: PROPOSITION 3.5. Let )~ be different from all the bifurcation values )~l , )~2 . . . . . j, k, a connection from dPk to dpj exists if and only if k > j.
Given any
Let us sketch an outline of the proof of Proposition 3.5. Using local analysis near the turning point ()~k, 4~k) (cf. Proposition A statements (a) and (c)) and reduction to onedimensional center manifolds one shows that there exists a connection from 4~k to 4~k-1 so
Blow-up in nonlinear heat equations
749
far as ~. lies in the region where 4~k e x i s t s - that is, either ~.k+l < ~. < ~k or ~.k < ~. < ~.k+l and is sufficiently close to ~.k. We will denote the connection by 4~k ~'* ~bk_ I. Due to the Morse-Smale structure of (E) (see [72]), the connection persists as ~. is moved away from ~k. This way one shows existence of the connections
-
4~k ~ 4~k-l ~ ' " ~
4~0,
provided that all these equilibria exist, or, equivalently, provided that )~k+l < )~ < ~k or ~.k < )~ < )~k+l. Existence of this chain of connections, in conjunction with the MorseSmale structure, further implies that the connection ~bk ~ q~j exists if k > j (cf. [17]). Finally, the Morse-Smale structure implies that the connection 4~k ~ q~j can exist only if the Morse index of q~k is greater than the Morse index of ~ j (cf. [ 1 7 ] ) , thus k > j is necessary (cf. Proposition B(b)).
3.5. Uniqueness results for classical connections In this subsection we will prove some uniqueness results for classical connections between equilibria. Those results will be used later in establishing L l-connections between some equilibria. Let us first recall basic properties of the unstable and stable manifolds of equilibria. The equilibrium solution ~bk exists for ~ 6 ()~k, ~.k+l] if k is even and for ,k 6 [~.k+l, ~.k) if k is odd. This equilibrium is known to be hyperbolic for ~. 6 ()~k,)~k+l) or for )~ 6 (2.k+1, ~.k); more precisely, if we denote b y / / j the eigenvalue of the linearized operator N-1 Ak "-- 0,.9- + - - 0 n
+ )~eq~k,
then / / ! > //2 > ' ' "
(3.3)
> //k > 0 > / / k + l > / / k + 2 > ' ' ' -
In particular, the Morse index of 4)k is equal to k (cf. Proposition B). Now let W ~(q~k) and W u (4)k) be the stable and the unstable sets of q~k, respectively, and define for j < k
W~' (~k)"- {w ~ W ~'( O k ) "
lim
t---~- - O G
e -nt
Ilu(, t
-
II - ol,
where # is an arbitrarily fixed constant satisfying//j < // < / / j + l a n d / / j S a r e as in (3.3). It is not difficult to see that Wy (4~k) is independent of the choice of # 6 ( # j , # j + l ) and is locally, near q~k, a j-dimensional submanifold of Wl"oc(4~k) whose tangent space Tc?kWy (ckk) is spanned by the j eigenfunctions of Ak corresponding to #1,//2 . . . . . / / j . The proof of these statements can be modelled in analogy to [39, Theorem 5.2.1], for modifications which are necessary cf. [10, Lemma 4.1] or [11, Theorem C.5].
750
M. Fila and H. Matano
In view of the fact that dim Wy (r
-- j,
codim W s (dpj_ l) -- j - 1,
one can suspect that the classical connection from Ck to q~j-1 lying on the set Wj (r forms a one-dimensional manifold provided that W] (r and W ~(r 1) intersect transversally, hence the connection is unique or it consists of a finite number of orbits. We will show that the connection is in fact unique: THEOREM 3.6. The classical connection from dpk to dpj-i lying on the set W~!(dpk) is unique up to time shift.
PROOF. As the tangent space Tck Wj' (r is spanned by the first j eigenfunctions of the second order operator Ak, the Sturm-Liouville theory shows that any nonzero element of TCk Wy (r has at most j zeros on the interval 0 ~< r ~< 1. It follows that any two different elements w, t~ E W)~(r \ {r satisfy
where z j is what we defined in Section 3.3. Similarly, as TCj_~ WS(q~j_l) is spanned by eigenfunctions of the operator A j _ ! corresponding to the jth, (j 4- 1)th, (j 4- 2)th . . . . eigenvalues, any two different elements w, ~ ~ W s ( r \ {r satisfy
j. Consequently, if u(r, t) and 5(r, t) are two different classical connections (different even after an arbitrary time shift) from Ck to Cj_ l lying on the manifold Wj (r one has z j (u(., t 4- r) - 5(., t)) -- j,
t6R,
(3.4)
for any choice of a constant r 6 •. Now, since both of the values u (0, t) and 5 (0, t) connect the values r (0) and Cj_ 1(0), one can find to, r E IR such that u(0, to 4- r) = 5(0, to). It follows from Proposition E(iii) that the value z j ( u ( . , t + r) - fi(., t)) drops at t - to, contradicting (3.4). This contradiction shows that the classical connection from r to Cj_ l lying on Wy (r is unique. D
3.6. L l-connection from Ck to r
k ~> 2
In what follows we set Ik -- (~.k,)~k+l], Ik -- 0~k, ~.k+l) if k is even and lk - [~k+l, ~.k), ]k -- (~.k+l, ~.k) if k is odd. As mentioned in the previous subsection, the equilibrium r
Blow-up in nonlinear heat equations
751
exists if and only if )~ 6 Ik, and it is hyperbolic if and only if )~ E i k . We will denote by Cz (k, j ) and Lz (k, j ) the union of orbits for the classical connections from 4~ to 4~jz. and that for the L l-connections from 4)~- to 4~., respectively. DEFINITION 3.7. By an L l-connection from 4~ to 4~. we mean a function u(r, t) such that: (i) u is a classical solution of
ut = Au + )~e",
b/~0,
xEBI(0), -~ j + 1. As for L 1-connection, we have the following: THEOREM 3.9. If there exists an L l-connection from 4)k to ~j, then k >~ j + 2. For the proof, we need several lemmas: LEMMA 3.10. Let u(r, t) be a global L 1-solution as in Lemma 3.2. Then ZJ (b/(', t) - ~bk) is monotone nonincreasing in t ~ IR. PROOF. This l e m m a follows from Proposition E and a certain limiting argument. The details are omitted. V] LEMMA 3.1 1. Let u(r, t) be an L l-connection from c/)k to ~j. Then there exists to ~ R such that j+2 z j ( u ( . , t ) - - d p k ) >~ k + 1
(if j < k), (if j > k)
f o r all t E ( - o c , to). PROOF. By Proposition C, we have
zj(qbj - qbk) --
j+l k + 1
(ifj k).
Considering that u (., t) converges to ~bj as t ~ that j+l z j ( u ( ' , t) - el)k) >~ k + 1
e~ locally uniformly in 0 < r ~< 1, we see
(ifj k)
for all large t. Hence, by L e m m a 3.10, the above inequalities hold for all t E R. This proves the l e m m a for the case j > k. Now, if j < k, then ~bj (0) - q~k (0) < 0. In view of this inequality, and with a close look at the argument which derives z j ( u ( . , t) - 4~k) ~> j + 1, we see that for each t 6 IR there exist points 0 < rl (t) < rz(t) < ..- < rj(t) < 1 such that ( - 1 ) i (u(ri(t), t) - c/)k(ri(t))) > 0
(i -- 1,2 . . . . . j).
Since u(r, t) blows up in finite time at r - 0, there exists to E R such that u ( 0 , to) - 4~k (0) > 0.
(3.5)
754
M. Fila a n d H. M a t a n o
This, together with (3.5), implies that there is another zero of u(., to) - 4~k lying between 0 and rl (to), hence
z j ( u ( . , t o ) - ckk) ~ j + 2. This and L e m m a 3.10 complete the proof.
D
LEMMA 3.12. I f u is a global L l -solution o f Problem (E) which blows up at t - T then >
if,,
< r
0 for tl < T. This is obvious if ~ ~> 3.~ = 2 ( N - 2). A s s u m e that ~. 6 ( 0 , ) ~ ) . Let 7r(r) = In
2(N-
2)
,k(r -Jr-e) 2
= 4 ~ ( r + e),
e > 0.
A straightforward calculation yields N-1
~rr @ ~
V
lPr @ ~.e ~p < 0
for r > O,
~ r (0) - -
2 8
< O.
Also, ~p(1) > 0 if e is small enough. Hence, 7r is a supersolution of (E). If ZI(U(', tl) -4 ~ ) = 0 and e is small enough then u(-, t l) < 7r, therefore, u is a global classical (bounded) s o l u t i o n - a contradiction. Similarly as in L e m m a 3.10, we have that z1(u(., t) - ck~) is nonincreasing in t. Set rl (t) -- min{r ~ (0, 11" u(r, t) - ~oc(r) - 0}. Suppose that Zl (U(', t) - 4 ~ ) does not drop at t - T. Then rl (T) -- l i m t ~ r rl (t) > 0. If Ur(rl (T), T) -- ck~ (rl (T)) then Proposition E(iii) yields a contradiction. ! If ur(rl (T), T) > ck~(rl (T)) then there exist e, 6 > 0 such that
u(~, t) < ~p(~) u(r, T - 6) < ~ ( r )
f o r t e [ T - 6, T), f o r r 6 [0,6].
But then u ~< 7r on [0, 6] • [T - 6, T) since 7t is a supersolution. This means that u does not blow up at t - T - a contradiction. E] PROOF OF THEOREM 3.9. Let u(r, t) be an L l - c o n n e c t i o n from q~k to ~bj. Since u(., t) belongs to W u (~k) for t < T, where T is the blow-up time of u, we have ZJ(U(', t) -- q~k) ~< k
for t < T
Blow-up in nonlinear heat equations
755
(cf. [10]). This and Lemma 3.11 imply that either k ~> j + 2 or k = j. If k = j then z1(u(., t) - cp~) is constant for t 6 IK what contradicts Lemma 3.12. U] We suspect that the converse of Theorem 3.9 is true: CONJECTURE. An L l-connection from dPk to dpj exists if and only if k ~ j + 2. To study the above conjecture, we need to know more about the nature of global L l_ solutions of (E). Among other things, the following fundamental questions still remain open: QUESTION 1 (regularity). Suppose a global L 1-solution of (E) blows up at t = T. Then which of the following three situations occurs? (a) The solution remains singular for all t ~> T; (b) the solution remains singular for a while but eventually becomes classical again; (c) the solution becomes classical immediately after T. QUESTION 2 (continuous dependence). Do L l-global solutions depend on their initial data continuously even beyond the blow-up time? As for Question 1, the self-similar peaking solution constructed in [54] has the property (c), but this solution does not satisfy the right boundary condition. So far we do not know which of the possibilities can actually occur. As for Question 2, an affirmative answer seems unlikely if we consider any global L l-solution satisfying the integral identity given in Definition 2.1. We even do not know whether or not the continuation beyond the blow-up time is unique. However, if we only consider global L l-solutions that are defined as in Lemma 3.2 (which gives minimal solutions among all possible L l-continuations), we suspect that some sort of continuity holds. Note that lower semi-continuity follows immediately from the definition. NOTE A D D E D IN PROOF. It has been shown recently in M. Fila, H. Matano and E PolL6ik, Existence of L l-connections between equilibria of a semilinear parabolic equation, Preprint, that the conjecture from Section 3.7 is true.
Acknowledgment Part of this work was done while the first author visited the University of Tokyo. He was partially supported by VEGA grant 1/4190/97.
References [1] D. Andreucci, M.A. Herrero and J.J.L. Vel~izquez,Liouville theorems and blow up behaviour in semilinear reaction diffusion systems, Ann. Inst. H. Poincar6, Anal. Non Lin6aire 14 (1997), 1-53.
756
M. Fila and H. Matano
[2] S. Angenent, The zeroset of a solution of a parabolic equation, J. Reine Angew. Math. 390 (1988), 79-96. [3] P. Baras and L. Cohen, Complete blow-up after Tmaxfor the solution of a semilinear heat equation, J. Funct. Anal. 71 (1987), 142-174. [4] J. Bebernes and S. Bricher, Final time blow up profiles for semilinear parabolic equations via center manifold theory, SIAM J. Math. Anal. 23 (1992), 852-869. [5] J. Bebernes and D. Eberly, Mathematical Problems from Combustion Theory, Springer, New York (1989). [6] A. Bressan, On the asymptotic shape of blow-up, Indiana Univ. Math. J. 39 (1990), 947-960. [7] A. Bressan, Stable blow-up patterns, J. Differential Equations 98 (1992), 57-75. [8] C.J. Budd, G.J. Collins and V.A. Galaktionov, An asymptotic and numerical description of self-similar blow-up in quasilinear parabolic equations, J. Comput. Appl. Math. 97 (1998), 51-80. [9] J. Bricmont and A. Kupiainen, Universality in blow-up for nonlinear heat equations, Nonlinearity 7 (1994), 539-575. [10] P. Brunovsk2~ and B. Fiedler, Numbers of zeros on invariant manifolds in reaction-diffusion equations, Nonlinear Anal. 10 (1986), 179-193. [11] M. Chen, X.-Y. Chen and J.K. Hale, Structural stability for time-periodic one-dimensional parabolic equations, J. Differential Equations 96 (1992), 355-418. [12] X.-Y. Chen and H. Matano, Convergence, asymptotic periodicity and finite point blow-up in onedimensional semilinear heat equations, J. Differential Equations 78 (1989), 160-190. [13] X.-Y. Chen and P. Polfi6ik, Asymptotic periodicity of positive solutions of reaction-diffusion equations on a ball, J. Reine Angew. Math. 472 (1996), 17-51. [14] K. Deng and H.A. Levine, The role of critical exponents in blow-up theorems: the sequel, J. Math. Anal. Appl. 243 (2000), 85-126. [15] J. Dold, Analysis of the early stage of thermal runaway, Quart. J. Mech. Appl. Math. 38 (1985), 361-387. [16] C. Fermanian Kammerer, E Merle and H. Zaag, Stability ofthe blow-up profile ofnon-linear heat equations from the dynamical system point of view, Math. Ann. 317 (2000), 347-387. [ 17] B. Fiedler and C. Rocha, Heteroclinic orbits of scalar semilinear parabolic equations, J. Differential Equations 125 (1996), 239-281. [18] M. Fila and H. Matano, Connecting equilibria by blow-up solutions, Discr. Cont. Dyn. Systems 6 (2000), 155-164. [ 19] M. Fila and P. Polfi6ik, Global solutions of a semilinear parabolic equation, Adv. Differential Equations 4 (1999), 163-196. [20] S. Filippas and R.V. Kohn, Refined asymptoticsfor the blowup ofut - Au = uP, Comm. Pure Appl. Math. 45 (1992), 821-869. [21] S. Filippas and W. Liu, On the blowup of multidimensional semilinear heat equations, Ann. Inst. H. Poincar6, Anal. Non Lin6aire 10 (1993), 313-344. [22] S. Filippas and E Merle, Modulation theory for the blowup of vector-valued nonlinear heat equations, J. Differential Equations 116 (1995), 119-148. [23] A. Friedman and J.B. McLeod, Blow up of positive solutions of semilinear heat equations, Indiana Univ. Math. J. 34 (1985), 425-447. [24] H. Fujita, On the blowing up of solutions of the Cauchy problem for ut = Au + u 1+~, J. Fac. Sci. Univ. Tokyo Sect. A. Math. 16 (1966), 109-124. [25] H. Fujita, On the nonlinear equations Au + e u = 0 and vt = Av + e v, Bull. Amer. Math. Soc. 75 (1969), 132-135. [26] V.A. Galaktionov, M.A. Herrero and J.J.L. Velfizquez, The space structure near a blow-up point for semilinear heat equations: a formal approach, USSR Comp. Math. Math. Phys. 31 (3) (1991), 399-411. [27] V.A. Galaktionov, S.P. Kurdyumov, A.P. Mikhailov and A.A. Samarskii, On unbounded solutions of semilinear parabolic equations, Preprint Keldysh Inst. Appl. Math. Acad. Sci. USSR 161 (1979) (in Russian). [28] V.A. Galaktionov and S.A. Posashkov, The equation ut -- Uxx + u ~. Localization and asymptotic behavior of unbounded solutions, Differentsial'nye Uravneniya 22 (1986), 1165-1173. [29] V.A. Galaktionov and S.A. Posashkov, Application of new comparison Theorems in the investigation of unbounded solutions of nonlinear parabolic equations, Differential Equations 22 (1986), 116-183. [30] V.A. Galaktionov and J.L. Vfizquez, Asymptotic behavior of nonlinear parabolic equations with critical exponents. A dynamical system approach, J. Funct. Anal. 100 (1991), 435-462.
Blow-up in nonlinear heat equations
757
[31] V.A. Galaktionov and J.L. V~izquez, Regional blow-up in a semilinear heat equation with convergence to a Hamilton-Jacobi equation, SIAM J. Math. Anal. 24 (1993), 1254-1276. [32] V.A. Galaktionov and J.L. V~izquez, Blow-up for quasilinear heat equations described by means of nonlinear Hamilton-Jacobi equations, J. Differential Equations 127 (1996), 1-40. [33] V. Galaktionov and J.L. Vfizquez, Continuation of blow-up solutions of nonlinear heat equations in several space dimensions, Comm. Pure Appl. Math. 50 (1997), 1-67. [34] I.M. Gelfand, Some problems in the theo~ of quasilinear equations, Amer. Math. Soc. Transl., Vol. 29 (1963), 295-381. [35] B. Gidas, W.-M. Ni and L. Nirenberg, Symmetry and related properties by the maximum principle, Comm. Math. Phys. 68 (1979), 209-243. [36] Y. Giga and R.V. Kohn, Asymptotically self-similar blowup ofsemilinear heat equations, Comm. Pure Appl. Math. 38 (1985), 297-319. [37] Y. Giga and R.V. Kohn, Characterizing blowup using similarity variables, Indiana Univ. Math. J. 36 (1987), 1-40. [38] Y. Giga and R.V. Kohn, Nondegeneracy of blow up for semilinear heat equations, Comm. Pure Appl. Math. 42 (1989), 845-884. [39] D. Henry, Geometric Theo~ of Semilinear Parabolic Equations, Springer, New York (1981). [40] M.A. Herrero and J.J.L. Vel~izquez, Blow up behaviour of one dimensional semilinear parabolic equations, Ann. Inst. H. Poincar6, Anal. Non Lin6aire 10 (1993), 131-189. [41] M.A. Herrero and J.J.L. Vel~izquez, Flat blow up in one dimensional semilinear parabolic equations, Differential Integral Equations 5 (1992), 973-997. [42] M.A. Herrero and J.J.L. Vel~izquez, Blow up profiles in one-dimensional semilinear parabolic problems, Comm. Partial Differential Equations 17 (1992), 205-219. [43] M.A. Herrero and J.J.L. Vel~izquez, Generic behaviour of one-dimensional blow up patterns, Ann. Scuola Norm. Sup. Pisa 19 (1992), 381-450. [44] M.A. Herrero and J.J.L. Velfizquez, Plane structures in thermal runaway, Israel J. Math. 81 (1993), 321341. [45] M.A. Herrero and J.J.L. Vel~izquez, Some results on blow up for semilinear parabolic problems, IMA Vol. Math. Appl., Vol. 47 (1993), 106-125. [46] M.A. Herrero and J.J.L. Vel~izquez, Explosion de solutions des ~quations paraboliques semilin~aires supercritiques, C. R. Acad. Sci. Paris, S6r. I Math. 319 (1994), 141-145. [47] M.A. Herrero and J.J.L. Vel~izquez, A blow up result for semilinear heat equations in the supercritical case, Preprint. [48] L.M. Hocking, K. Stewartson and J.T. Stuart, A nonlinear instability burst in plane parallel flow, J. Fluid Mech. 51 (1972), 705-735. [49] D.D. Joseph and T.S. Lundgren, Quasilinear Dirichlet problems driven by positive sources, Arch. Rat. Mech. Anal. 49 (1973), 241-269. [50] S. Kaplan, On the growth of solutions of quasilinear parabolic equations, Comm. Pure Appl. Math. 16 (1963), 327-330. [51] A.A. Lacey, Mathematical analysis of thermal runaway for spatially inhomogeneous reactions, SIAM J. Appl. Math. 43 (1983), 1350-1366. [52] A.A. Lacey and D. Tzanetis, Global existence and convergence to a singular steady state for a semilinear heat equation, Proc. Roy. Soc. Edinburgh Sect. A 105 (1987), 289-305. [53] A.A. Lacey and D. Tzanetis, Complete blow-up for a semilinear diffusion equation with a sufficiently large initial condition, IMA J. Appl. Math. 41 (1988), 207-215. [54] A.A. Lacey and D.E. Tzanetis, Global, unbounded solutions to a parabolic equation, J. Differential Equations 101 (1993), 80-102. [55] O.A. Ladyzhenskaya and N.N. Ural'ceva, Linear and Quasilinear Equations of Elliptic Type, Academic Press, New York (1968). [56] H.A. Levine, The role of critical exponents in blowup theorems, SIAM Rev. 32 (1990), 262-288. [57] W. Liu, Blow-up behavior for semilinear heat equations: multi-dimensional case, Rocky Mountain J. Math. 23 (1993), 1287-1319. [58] Y. Martel, Complete blow up and global behaviour of solutions of ut - Au = g(u), Ann. Inst. H. Poincar6, Anal. Non Lin6aire 15 (1998), 687-723.
758
M. Fila and H. Matano
[59] K. Masuda, Analytic solutions of some nonlinear diffusion equations, Math. Z. 187 (1984), 61-73.
[60] J. Matos, Convergence of blow up solutions of nonlinear heat equations in the supercritical case, Proc. Roy. Soc. Edinburgh Sec. A 129 (1999), 1197-1227. [61] J. Matos, Self-similar blow up patterns in supercritical semilinear heat equations, Comm. Appl. Anal. (to appear). [62] F. Merle, Solution of a nonlinear heat equation with arbitrarily given blow-up points, Comm. Pure Appl. Math. 45 (1992), 263-300. [63] F. Merle and H. Zaag, Stability of the blow-up profile for equations of the type ut = Au + [ulP-l u, Duke Math. J. 86 (1997), 143-195. [641 F. Merle and H. Zaag, Optimal estimates for blowup rate and behavior for nonlinear heat equations, Comm. Pure Appl. Math. 51 (1998), 139-196. [65] N. Mizoguchi and E. Yanagida, Critical exponents for the blow-up of solutions with sign changes in a semilinear parabolic equation, Math. Ann. 307 (1997), 663-675. [66] N. Mizoguchi and E. Yanagida, Critical exponents for the blowup of solutions with sign changes in a semilinear parabolic equation,//, J. Differential Equations 145 (1998), 295-331. [67] K. Nagasaki and T. Suzuki, Spectral and related properties about the Emden-Fowler equation - A u = )~eu on circular domains, Math. Ann. 299 (1994), 1-15. [68] W.-M. Ni and P. Sacks, The number of peaks of positive solutions of semilinear parabolic equations, SIAM J. Math. Anal. 16 (1985), 460-471. [69] W.-M. Ni and P. Sacks, Singular behavior in nonlinear parabolic equations, Trans. Amer. Math. Soc. 287 (1985), 657-671. [70] W.-M. Ni, P.E. Sacks and J. Tavantzis, On the asymptotic behavior of solutions of certain quasilinear pat'abolic equations, J. Differential Equations 54 (1984), 97-120. [71] P. Polfi6ik, Domains of attraction of equilibria and monotonicity properties of convergent trajectories in parabolic systems admitting strong comparison principle, J. Reine Angew. Math. 400 (1989), 32-56. [721 P. Polfi~ik, Transversal and nontransversal intersections of stable and unstable manifolds in reaction diffusion equations on symmetric domains, Differential Integral Equations 7 (1994), 1527-1545. [73] A.A. Samarskii, V.A. Galaktionov, S.P. Kurdyumov and A.P. Mikhailov, Blow-up in Problems for Quasilinear Parabolic Equations, Nauka, Moscow (1987) (in Russian); English translation: W. de Gruyter, Berlin (1995). [741 D. Tzanetis, Asymptotic behaviour and blow-up of some unbounded solutions for a semilinear heat equation, Proc. Edinburgh Math. Soc. 39 (1996), 81-96. [75] A. Vanderbauwhede, Centre manifolds, normal forms and elementary, bifurcations, Dynamics Report. Ser. Dyn. Syst. Appl., Vol. 2, Wiley, New York (1989), 89-169. [76] J.J.L. Velfizquez, Local behaviour near blow up points for semilinear parabolic equations, J. Differential Equations 106 (1993), 384-415. [77] J.J.L. Vel~zquez, Classification of singularities for blowing up solutions in higher dimensions, Trans. Amer. Math. Soc. 338 (1993), 441-464. [78] J.J.L. Vel~izquez, Higher dimensional blow up for semilinear parabolic equations, Comm. Partial Differential Equations 17 (1992), 1567-1696. [79] J.J.L. Vekizquez, Estimates on the ( N - 1)-dimensional Hausdorff measure of the blow-up set for a semilinear heat equation, Indiana Univ. Math. J. 42 (1993), 445-476. [80] E Weissler, Single-point blowup for a semilinear initial value problem, J. Differential Equations 55 (1984), 204-224.
CHAPTER
15
The Ginzburg-Landau Equation in Its Role as a Modulation Equation*
Alexander Mielke Mathematisches Institut A, Universitiit Stuttgart, Pfaffenwaldring 57, D-70569 Stuttgart, Germany E-mail: mielke @mathematik, uni-stuttgart.de http://www, mathematik, uni-stuttgart.de/~ mielke
Contents 1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2. The Ginzburg-Landau formalism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1. Spectral assumptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2. Formal derivation of modulation equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3. Transformations and scalings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4. Symmetries of the problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.5. A simple example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.6. A few other amplitude equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3. Applications in hydrodynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1. The Rayleigh-B6nard problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2. The Couette-Taylor problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3. The Poiseuille flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4. Sideband instabilities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4. Special solutions and dynamics of the Ginzburg-Landau equation . . . . . . . . . . . . . . . . . . . . . 4.1. Plane waves and their stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2. The real Ginzburg-Landau equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3. Special solutions for the complex Ginzburg-Landau equation . . . . . . . . . . . . . . . . . . . . . 4.4. Global existence for the complex Ginzburg-Landau equation . . . . . . . . . . . . . . . . . . . . . 5. Attractors for large and unbounded domains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1. Existence of attractors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2. Comparison of attractors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3. An example with different limit attractors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6. Justification of the Ginzburg-Landau formalism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.1. Kirchgfissner reduction, spatial center-manifold theory . . . . . . . . . . . . . . . . . . . . . . . . 6.2. The approximation property . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.3. The attractivity of the set of modulated patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . .
761 765 765 767 770 771 772 773 775 776 777 779 782 783 784 786 795 798 805 805 806 808 809 810 814 818
*The research was partially supported by D F G - S P P "Dynamische Systeme" under Mi 459/2 and by VolkswagenStiftung under I/71016. H A N D B O O K OF D Y N A M I C A L SYSTEMS, VOL. 2 Edited by B. Fiedler 9 2002 Elsevier Science B.V. All rights reserved 759
A. Mielke
760
6.4. Shadowing by pseudo-orbits and global existence . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.5. Comparison of attractors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.6. Comparison of inertial manifolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.7. Results on the Couette-Taylor problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Abstract The Ginzburg-Landau equation (GLe) ~tA = div[(I -k- i S ) V A ] -+- p A - ~'IAleA, with A(t, x) 9 C, t >~ O, x 9 R d, appears in many different contexts, e.g., nonlinear optics with dissipation or the theory of superconductivity. In addition, it plays an important role as modulation equation and it serves as a simple mathematical model for studying the transition from regular to turbulent behavior when, for ~ > 0 fixed, the dispersion parameters (S, IMP') = s (I, - 5 ) with s >> 1 are considered. The purpose of this work is to review the latter two aspects of the GLe. In a variety of pattern-forming systems the nonlinear modulations of the basic periodic pattern can be described by the solutions of the GLe. We discuss this for three classical hydrodynamical situations: the Rayleigh-B6nard convection, Poiseuille and the Taylor-Couette problem. Indeed, the GLe should be seen as a normal form or the lowest order expansion of a bifurcation equation in the context of a weakly unstable system when continuous spectrum moves over the imaginary axis upon changing an external parameter. In particular, this theory gives a natural and simple approach to the theory of sideband instabilities. We explain the classical derivation of the GLe as a modulation equation of an original partial differential equation 9tu = Lu + N ( u ) and give the abstract setting which allows for the application of the Ginzburg-Landau formalism which is based on the ansatz
u(t, x) ,~ U A (t, x) = sA(~2t, s(x - Cgrt))ei(C~
-+-c.c.,
where e2 is the distance of the external parameter from its critical value. We then study the mathematical properties of the GLe which are relevant for the justification of the formalism. This includes a variety of special solution classes, a global semigroup theory in function spaces containing L ~ (II~d) as well as the construction of the global attractor. Finally we review the results which prove that the solutions A of the GLe inserted into the above ansatz provide good approximations for solutions u of the original system. In particular, the direct implications to hydrodynamical problems are discussed.
820 822 824 827 829
The Ginzburg-Landau equation in its role as a modulation equation
761
1. Introduction
The purpose of this work is to review recent developments in the theory of the GinzburgLandau equation (GLe) as a modulation equation. While the theory of modulation equations is a standard tool in physics and mechanics, its dissemination in mathematics is very restricted. The main goal here is to explain the physical and mechanical background of this theory in mathematical terms to enable researchers in the fields of dynamical systems and partial differential equations to familiarize with the main questions and results. Clearly, we can neither give all the relevant results here nor it is possible to give all the mathematical details which are needed for the full understanding of the phenomena. In this introductory work we can only present the main ideas, motivations and techniques to display the general methodology and the simplest versions of the results associated to the field. Hopefully this survey is a stimulating guide to the recent literature, where more details and results can be found. The mathematical results in this field are roughly divided into two areas, (i) the analysis of the GLe in itself and (ii) the relation between the solutions of the GLe and the original PDE. Since the number of mathematical papers on the GLe published per year exceeds 100, we have to restrict our view, in area (i), to developments which are related to the questions in area (ii). In particular, this relates to questions on the solution behavior on unbounded domains. In Section 2 we give the general setup for the theory of modulation equations which was developed to describe modulations in space and time of a basic periodic pattern which appears in a system when certain control parameters become critical. If we consider the physical domain S2 = ]KJ x 27, where 27 is a bounded cross-section, with x e IKa and y e Z, then the basic periodic pattern takes the form p(t, x, y) -- E(t, x)~o.k0 (y),
where E(t, x) = e i(c~176
(1.1)
Here o9 e R and k0 6 R a denote the temporal frequency and the spatial wave vector of the basic pattern, respectively. A modulated pattern is a function of the form
u(t, x, y) = B(r, ~)p(t, x, y) + c.c.
(1.2)
where the amplitude function B(r, ~) e C depends on a slow time variable r and a large spatial variable ~. In our context we will have r = e 2t
and
~-s(X-Cgrt),
where Cgr is the group velocity of the basic pattern. The amplitude IB(r, ~)1 gives the intensity of the basic pattern while phase changes of B give rise to changes in the temporal frequency and in the spatial wave vector of the pattern. In the theory of modulation equations one starts with a partial differential equation
Otu = L ( # , Ox, Ov)u + N(lz, Ox, Or, u)
(1.3)
A. Mielke
762
which is posed on S2 = IRd • 2? together with suitable boundary conditions on 0 s This systems is supposed to have u -- 0 as the trivial solution for all values of the small parameter #. Moreover, # = 0 is taken to be the threshold of instability, that means that u -- 0 is asymptotically stable for/z < 0 and unstable for # > 0. At criticality/z - - 0 the linear operator admits only the basic pattern p as a neutral mode which is neither decaying nor growing. The aim of modulation theory is to understand the evolution of modulated patterns in the form (1.2). This is done by deriving a partial differential equation for the modulation function B. More precisely, one inserts # -- pe 2 and the multiple scaling ansatz
u(t, x, y) = UA (t, X, y) +
O(62)
with UA (t, x) -- eA(eZt, e(x - Cgrt))p(t, x, y) + c.c.
(1.4)
in (1.3) and equates equal powers of the terms e JE n to 0. The desired partial differential equation, called modulation equation, is then found as a solvability condition for the equation associated to e3E. Our interest lies in those systems for which the associated modulation equation is the GLe
OrA = div~ [AoV~A] + PXo, 1A -~'IA]2A.
(1.5)
Here )~0,I, ~" 6 C, and A0 6 C d • is a symmetric matrix whose real part is positive definite. The precise assumptions of this theory and the formal calculations in the general case are given in Section 2 together with a first simple example. There we also discuss questions of different scalings and of symmetries of the GLe. We will call the procedure described above the Ginzburg-Landauformalism, since it is a formal procedure which derives from the original problem (1.3), via the multiple scaling ansatz (1.4), the associated modulation equation. In our cases this is the GLe, and we refer to Section 2.6 for a few other modulation equations. The general philosophy of modulation theory can be found in the books [92,17] or in the review [ 110]. If A is a solution of the GLe, the function UA is called the Ginzburg-Landau approximation for the solution u of (1.3) which has the same initial data u(0, .) - UA (0, .). The major question in the justification of the GLe as a modulation equation is whether UA (t, .) remains close to the true solution u(t, .) over a sufficiently long time scale. Certainly this time scale has to be of order (_9(1/82) since only then the evolution of A (r, .) with r - e2t has any impact on UA (t, .). This justification question will be treated in Section 6. In Section 3 it is shown how the Ginzburg-Landau formalism can be applied to the three prototype problems in hydrodynamics, namely the Rayleigh-B6nard problem, the Couette-Taylor problem and the Poiseuille problem. In all three problems we have an open flow region with either one or two unbounded directions. At a critical Reynolds number the basic flow becomes unstable and experiments clearly show modulated periodic patterns. Historically these problems mark the origin of the GLe as a modulation equation. In fact, it was the need to explain large scale effects in these hydrodynamical problems which led to the development of the modulation theory in the late 60s and beginning 70s, see [ 111,137, 35,112] for the Rayleigh-B6nard problem and [139,69,32,140] for the Couette-Taylor and the Poiseuille problem.
The Ginzburg-Landau equation in its role as a modulation equation
763
A mathematical theory for strictly periodic patterns was developed in the late 50s and 60s by using the Liapunov-Schmidt reduction, see, e.g., [83]. However, this theory could not explain the pattern selection which was observed in experiments, since many periodic patterns are stable with respect to perturbations of the same spatial period but unstable with respect to perturbations with slightly different spatial period. First explanations of this phenomenon of sideband instability were given in [47,86]. This led already to a linear theory of modulated patterns. In order to understand also the nonlinear evolution of modulated patterns the Ginzburg-Landau formalism was invented. As a by-product the theory of sideband instabilities obtained a simple form, see Sections 3.4 and 4.1. More general large scale effects which are of importance in the Couette-Taylor problem are discussed in [24, Section VII]. In Section 4 we study the GLe in its own right. The huge popularity of the GLe arises from the two facts that it is rather simple and explicit and that it appears in a many different applications, like for instance in superconductivity [62,45,23,14], in laser optics [80,103] and in reaction-diffusion systems [63,85,73,131,121]. In all these fields special solution classes as well as special properties of the GLe are of importance. There is a great distinction between the real GLe (rGL), where X0.1, ~" E R and A0 -- I, and the general complex GLe (cGL). In Section 4.1 we shortly discuss the rotating plane waves A(r, ~) = r e i(r176 together with their stability. This gives the relation between the classical field of sideband instabilities and the modulation theory. In the one-dimensional case the rGL has rather special nodal properties which can be used to study the solution behavior intensively. Moreover, for the GLe in one space dimension there are numerous results on standing, rotating and traveling pulses and fronts. For the two-dimensional GLe it is possible to construct rotating waves which reduce to the Ginzburg-Landau vortices in the case of rGL. At the end of Section 4 we develop a general semigroup theory for the GLe for space dimension d = l, 2, 3 for bounded as well as unbounded domains. For the case Re~"> 0 we show that the semiflow on LeC(R d) is well defined (under the usual conditions on the dispersion parameters if d = 3). Section 5 is independent of the theory of the GLe although the theory and methods were developed mainly for this equation. It is shown that the semiflow on Lvc (R d) has a global attractor when compactness and attractivity is taken with respect to a weighted norm. We use ideas similar to [7,55,54]. The reason for considering the GLe on unbounded domains is motivated by the modulational theory. On the full space it is easy to accommodate the multiple scaling ansatz (1.4) for any e > 0, since we do not have to fulfill boundary conditions. If one wants to work on bounded domains Y2e = ( - g , g)d x r for the full problem (1.3) then the length f has to be chosen at least of order 1/e otherwise the modulations due to A (s2t, s x ) would not be effective in ~2e. Using weighted norms we develop a theory which allows us to compare the global attractors A s?,' for different domains Y2, tending to the full space R d with the attractor A Rd associated to the semiflow on L ~ (Rd). We are able to show upper semicontinuity to this limit but lower semicontinuity is false in general. If the limit Y2,, ~ R d and the limit r -+ ec in the definition of the attractor are done simultaneously we obtain a generalized limit attractor which actually coincides with A RJ . Section 6 treats the question of the mathematical justification of the Ginzburg-Landau formalism. This theory was developed only within the last 10 years starting from [26, 142,
764
A. Mielke
87]. Somewhat earlier a series of papers [74,72,73,2] used the Kirchg~issner reduction (cf. [84]), also called spatial center-manifold reduction, to derive the steady one-dimensional Ginzburg-Landau equation for some hydrodynamical problems, see Section 6.1. The following subsections treat the full time-dependent problem. By now it is not possible to prove that the full problem (1.3) can be reduced to the GLe (1.5) in the sense of dynamical systems. This would mean that there is an invariant manifold in the phase space Y of (1.3) and the reduced flow on this manifold is given by (1.5), perhaps after adding higher order corrections. The main difficulty in proving such a result arises from the fact that the continuous spectrum of the linearization at u = 0 does not have a spectral gap which would allow us to separate the critical modes from the stable modes. Certain attempts to avoid this splitting are given in [96,125,94]. Thus, the best one can hope for is to prove approximation of the solutions u(t, .) by UA (t, .) over a time interval [0, rl/E 2] for rl > 0 fixed. Under suitable assumptions such an approximation result can be shown. Additionally it is possible to show that all small initial data u0 will evolve such that after time t -- 1/e 2 the solution u(1/e 2, .) --Sl/eZ(UO) is a modulated pattern, i.e., there is a function A0 such that u(1/e 2, .) -- Uao ('). Thus after this transient time, the solution can be well described by a solution of the GLe according to the above approximation result. This fact is called the attractivity of the set of modulated patterns, [48,124,125]. Iterating the above-mentioned approximation and attractivity property it is clear that the true solution u(t, .) can be approximated by pieces of Ginzburg-Landau approximations Uan (t, .), t ~ [n/e 2, (n + 1)/e2), where we have to allow for jumps at the times tn -- n/e 2. A delicate analysis controls these jumps showing that they are in fact relatively small. Hence, we say that the true orbit is shadowed by a pseudo-orbit of the GLe. As such Rd pseudo-orbits are attracted into a small neighborhood of the global attractor .AGL (with respect to the weighted norm), it can be shown that the global attractor A Rd• ~ of the full -JRd problem (1.3) has a relatively small distance to the image of r under the mapping A w-~ UA. For the one-dimensional Swift-Hohenberg equation on the interval 12e -- ( - e / e , g/e) with periodic boundary conditions an even better convergence statement can be shown for the comparison of the flows on the inertial manifolds of (1.3) and (1.5), see Section 6.6. The major problem with the present status of the justification of the Ginzburg-Landau formalism is that it only gives information over long but not infinite times. So it is not possible to use standard methods of dynamical-systems theory to transfer results from the 'reduced system' (the GLe (1.5)) to the full system (1.3). For instance, the existence of pulse or spiral waves in cGL does not give automatically the existence of the corresponding solutions in the full problem. A classical counterexample is the existence of the downstream pulses in the two-dimensional Poiseuille flow, see the discussion at the end of Section 3.3. Another example of different long-time behavior is indicated in the discussion at the end of Section 6.6. Similarly the question of stability arises; for instance, if we consider the rotating plane waves, then it is clear that they correspond to space-time periodic patterns of the full problem. The stability of these waves in the GLe is easily investigated as shown in Section 4.1, however, there is no direct way to infer the same stability information for the associated pattern in the full problem. One has to repeat the analogous calculations for the spectral problem associated with the linearization of the full problem at this pattern, see
The Ginzburg-Landau equation in its role as a modulation equation
765
[97,99,100,117] for such an approach. Similar problems arise, if we try to transfer dynamic phenomena like phase slips, diffusive stability or diffusive mixing from the GLe to the full problem, see [51,133,107]. In this situation, the best we can do is to learn from the analysis of the GLe to be able to make good guesses for the full problem. Then we have to transfer the analytical methods used to study the GLe to the according methods for the full problem. Hopefully we are then able to prove the desired result for the full problem directly.
2. The Ginzburg-Landau formalism In this section we describe the general formalism how to derive the modulation equation from a general PDE. We give precise assumptions on the linear part and discuss certain scaling and symmetry effects. We consider general PDEs on unbounded domains S-2 in the form s -- IRd x Z', where Z C IR" is a bounded domain with Lipschitz boundary. We write z = (x, y) for spatial points in I-2 = IRd x Z . The underlying PDE is written abstractly in the form Otu = L ( # , Ox)u + N(lz, Ox, u),
(2.1)
where u :X-2 --~ IR,,1 denotes the unknown function and # is a real parameter. The linear operator L(/z, 0x) is a partial differential operator on I2 including boundary conditions on 0 f2. It involves the derivatives 0x as well as 0,,, but we only display the former ones as x plays a distinguished role as unbounded variable. The nonlinear terms N ( # , Ox, u) are assumed to satisfy N ( # , 0x, e u) 0 ( 6 2 ) for sufficiently smooth u :S-2 --+ IRm. =
2.1. Spectral assumptions In such a situation u = 0 is the trivial homogeneous solution of (2.1) and we are interested in the onset of instability. Throughout we assume that the system has u --= 0 as an asymptotically stable state for # < 0 and u = 0 is unstable for # > 0. The question that is answered by modulation theory is which patterns are seen when the parameter # is close to the instability threshold # = 0. As in finite-dimensional dynamical systems this is determined by the eigendirections associated to those eigenvalues passing the imaginary axis. In our situation of a PDE with x 6 IRa the spectral problem is solved by using Fourier transform in the x-direction. We insert the ansatz u(t, x, y) = e zt ei(x'k)q) (y) into the linear part of (2.1) to obtain the spectral problem X4) = L ( # , ik)4~
(2.2)
which is now posed on the bounded cross-section Z . Thus, for typical problems L ( # , ik) has a discrete spectrum s p e c L ( / z , k ) . Note that s p e c L ( l z , - k ) = s p e c L ( # , k ) since L ( # , 0s) is a real operator. In fact, for the Ginzburg-Landau formalism we only need the
766
A. Mielke
eigenvalue family )v(/z, k) with largest real part to be isolated for/z ,~ 0. More precisely, the general situation leading to the GLe as a modulation equation can be characterized as follows. Basic spectral assumptions. There exist 6, Y > O, ko ~ lRd and eigenvalues )~ : ( - 6 , 6) • Bko (6) --+ C such that f o r all /z ~ ( - 6 , 6) the spectrum of L(/z, k) satisfies the following: (1) F o r k q~ Bko(a) U B_ko(6) we have spec(L(/z, k)) C {Reef ~< -Y}(2) For k ~ Bko(a) we have spec L(/z, k) -- {~.(/z, k)} tO Ss(/z, k)
with Ss(/z, k) C {Reef ~< -?,},
where )~(/z, k) is an algebraically simple eigenvalue with the expansion X(/z, k) - Xo(/z) + (Xl (/z), k - ko) - (A(/z)(k - ko), k - ko)
+ o ( I k - k013).
(2.3)
(3) We impose Re ~0(0) = 0, (d/d/z) Re ~.0(0) > 0, Re )~l (0) = 0 and Re A(0) is a positive definite matrix. Here Ss(#, k) constitutes the stable part of the spectrum of L ( # , ik). The conditions on )~(#, k) guarantee Re )v(0, k) ~ 0 with equality only for k = k0. Moreover, Re)v(#, k0) has the same sign as #, which exactly corresponds to our definition of the threshold of instability. Further on we use the abbreviations d )~0,1 -- ~ , 0 ( 0 )
E C,
Cgr -- -i)vn (0) 6 IRd
and
A0 -- A(0),
where Cgr is called the group velocity of the basic pattern. These assumptions lead to three different generic cases which either lead to the real or the complex GLe. There might be other cases, but we only treat these ones as they associate to generic cases without degeneracies. CASE 1. ko Vk 0 and )v(/z, k) 6 lR. This situation typically appears if the system has an additional reflection symmetry x --+ - x and hence )v(/z, k) = ) v ( # , - k ) = )v(#, k). The diffusion part of GLe will be real and further symmetry properties determine whether the nonlinear term is real or complex. CASE 2. ko ~ 0 and )~(0, k0) = ico with co > O. This is the general situation for which we obtain the anisotropic cGL. CASE 3. k0 = 0 and )~(0, k0) = ico with co > O.
The Ginzburg-Landau equation in its role as a modulation equation
767
In this situation system (2.1) has a spatially homogeneous Hopf bifurcation when # passes the origin. If (2.1) is rotationally invariant we have additionally X(#, k) = X(#, Ikl) and we obtain an isotropic cGL. We will refer to these cases regularly in the subsequent discussions.
2.2. Formal derivation of modulation equations We now want to show how the GLe
3rA--div;(AoV;A)
(2.4)
+ pXo, I A - ~"IAI2A
is obtained from the original system (2.1) by a multiple scale expansion. At this stage the procedure is formal since it assumes that the original problem has solutions which are modulations of the basic periodic pattern over sufficiently long time intervals. The mathematical justification of this assumption is studied in Section 6. To simplify the notations we omit the cross-sectional variable y, however, the approach is fully general. 2.2.1. The linear part. As ,k(/z, k) is an eigenvalue of L(/z, ik) with the eigenfunction 9 ~.k we see that v(t, x) -- e~(rt'k)t+i(k'x)~u.k solves
Otv -- L ( # , 3x)V,
(2.5)
which is the linearization of (2.1). For (#, k) ,~ (0, k0) we use the parameter scaling /,t -- e2p
and
k -- k0 + etc
with 0 < e 0, ~ 6 R and an invertible K 6 Rd •
0~,4-- ldiv"((KtA~ r
With A ~
1/r K tA 0 K
)+
~.0,1
(2.15) we find the equivalent form A
m
iw A + _ I z I 2 x . ,.~
r
C
rs 2
Sl "1t- iS2, Sj 6 IRs~Xm d we choose K .v/TSTI/2Q with Q t Q _ I, then -- I q- i QtS11/2 $2 $71/2 Q and a suitable choice of Q allows us to diago-
nalize the imaginary part. Next, we choose ~ -- p Im)~o, 1 and r - Re )vo, I. For s we either t a k e s - _v/l l/r or, if Re " < 0, we can also t a k e s - y / - R e ~ / r . Then, after dropping the tildes we arrive at
d OrA -- E ( 1
j=l
+ iotj)O ~j 2 A + pA + d"'(fl)lAl2A
(2.16)
771
The Ginzburg-Landau equation in its role as a modulation equation
where either dA(fl) - - e i~ or d'(/3) -- - ( 1 + ifl), respectively. We could also reduce to the case p 6 { - 1 , 0, 1} by choosing r - - I p l k o , l, however, it is sometimes better to keep p as a parameter which may change sign. The parameters 0/1 . . . . . Old are called linear dispersion parameters, and /3 in d ( f l ) -- ( 1 + i/3) is the nonlinear dispersion parameter. GLe is called isotropic if all f f j a r e the same. Taking the complex conjugate of the equation we can interchange the signs of all these dispersion parameters simultaneously. If all otj have a large modulus and have the same sign, e.g., Otj ~ 1 and if ] Im~"l >> [ Re~'l, then (2.16) can be considered as a perturbation of the nonlinear Schr6dinger equation 8T A -- iAA • iIAIZA. By rescaling accordingly we obtain A
OrA -- i
j--l
1---
Otj
~J
A
+ pA -
~
+isignfl
IA A
"
(2.17)
For 1/C~j, IO, 1/fl --+ 0 we obtain the nonlinear Schr6dinger equation; it is the focusing case if sign/3 = - 1 and the defocusing case for sign/3 = + 1. In the global existence theory in Section 5 this difference will be important. Steady solutions or rotating waves of the form A (r, ~) -- e l~ A (~) solve an elliptic problem. In the isotropic case c~ - otj the equation is (1 + iot)AA + (p - i~)A + d ( f l ) l A ] 2 -- 0 which transforms via an appropriate scaling into AA-(I+i0~
)2 A + ( 2 + i 0 2 ) ( I + i 0 2 ) I A I 2 A - - 0
(2.18)
A
as long as d ( f l ) , p - i ~ r (1 + iot)[0, oo). This form allows for the study of pulse solutions, i.e., solutions which decay exponentially, namely like e -I~1. For instance, for d - 1 and 01 - 0 2 there is the explicit pulse A(~) -- (cosh~) -(l+i01) see Section 4.3.1 for more details. For 01 -- 02 -- 0 we obtain the real GLe (rGL), and for d - 2 there exist the steady Ginzburg-Landau vortices of degree n c Z. They have the form A (x) r , ( l x l ) ( x l + i x z ) ' / l x l " with r, "[0, oo) --> [0, oo) satisfying r,,(s) ~ s" for s --> 0 and r,,(s) --+ l / x / 2 for s --+ e~, see Section 4.2.1.
2.4. S y m m e t r i e s o f the p r o b l e m Here we treat the question how symmetries of the full problem (2.1) reduce to symmetries for the associated GLe, where symmetries of GLe are related to restrictions on the coefficients A0, k0, l and ~". Before doing this we recall the general symmetries of GLe, namely invariance under time and space translations (T and ~) as well as the phase invariance A ~ e i4~A, ~ E S 1. The first two arise from the original problem which is also invariant under time and space translations (t and x). However, the phase invariance has to be understood as a normal form symmetry; we refer to [74,94] for a discussion. For a usage of the symmetries of cGL in the study of bifurcations and chaos on finite domains we refer to [6] and the references therein. We now return to the original question about further symmetries and first treat the case k0 ~ 0. Depending on the symmetries of the original problem the derived GLe also has
772
A. M i e l k e
symmetries. Assume that the original problem has a reflection symmetry 7-4" (x, u) w-~ (Rlx, Rzu) with R 2 -- IRe and R 2 -- IR .... Reflecting the basic periodic pattern p ( t , x ) gives the reflected pattern ~ ( t , x ) - R2p(t, Rlx) --ei(C~176 . We have either -- + p or ~ - 4-~. This follows since our assumptions imply that, up to complex multiples a 6 C, there are only two basic patterns; and since ~ is a reflection, we have a - -+-1. Another way to see this is to use 7~L(#, Ox) -- L ( # , Ox)T~ which gives L(#,ik)-- R21L(#,iRtlk)R2
andthus
)~(#,k) - ) ~ ( # , Rtlk).
(2.19)
From ~ -- 4-~ we conclude co - 0, Rtl k0 - - k 0 and R2 q~0,k0 -- -+-~0,k0 9With the general fact )~(/z,-k) - )~(/z, k), (2.3) and (2.19) we obtain ~ l ( # ) -- --Rl~,l ( # ) ,
Zo(#) - ~o(#),
Ao = RI-AoRtl.
This implies ~.0, l 6 R and Cgr -- R lCgr. Thus, GLe is symmetric with respect to the reflection (~, A) w-~ (RI~, + A ) and the coefficients A0, )~0,1 and ~" satisfy
RIAoRtl----Ao,
2.0.1ER,
~'ER.
From this we cannot conclude that A0 is also a real matrix except if it is scalar. However, generically the present situation is associated to the above case 1 with )~(#, k) 6 R for Ik - k01 ~< 6, and then we know A0 6 IRdxd. The case ~ -- -+-p implies Rtl k0 -- k0 and RzqO0,k0 -- -+-qO0,k0, and similar to the above we obtain R l C g r - Cgr and RI AoRtl -- A0. GLe is now invariant under the reflection (~, A) w-~ (RI ~, + A ) which has no consequences for the coefficients )~0.l, ~" 6 C. This is the generic situation described in case 2 above. Case 3 corresponds to k0 - 0 where the basic periodic pattern p does not depend on x. Since p depends on t (co ~ 0), any reflection gives ~ - i p . We obtain the same conclusions as for case 2. However, in this situation the set of reflections is no longer restricted by Rtl k0 -- k0 and it is possible to consider all reflections in the space R d. Then we have an isotropic situation and obtain A0 -- bIRe with b ~ C.
2.5. A simple example To illustrate the above method we study a scalar problem on •2, namely OtU - -
--A2u
--
202u - u + (a, Vu) + (b, VAu) + # u
-+- yl u3 + (F, Vu)u 2 nt- y2ulVul 2.
(2.20)
Here u(t, xl, X2) E I[~ and Ol -- O/Oxl, moreover Yl, Y2 E • and a, b, F ~ ]I~2 are fixed coefficients while # is the small parameter. The operator L ( # , ik) is simply a scalar and thus it coincides with the eigenvalue ~(/~,k)--Ikl
4 + 2k 2 - 1 + i [ ( a , k ) - I k l 2 ( b , k ) ] + #
The Ginzburg-Landau equation in its role as a modulation equation
773
We find k0 -- (1,0) t and the expansion
&(e2p, ko -+- etc)
- ico - 6i(Cgr, K) -+- 62(p _ ( A o K , to)) + (._9(63)
4 - 6ibl with c o - al - bl, Cgr -- b + (2bl, 0) t - a, Ao -- \ - 2 i b 2
-2ib2 ). 2 - 2bl
Since the problem is scalar and the nonlinearity is cubic the coefficient ~" 6 C can be calculated simply by inserting the periodic pattern p(t, x) - E ( t , x) - e i(c~ into the nonlinearity and identifying the term associated to EJ with j - 1. This gives the complex coefficient of the cubic term
~ " - 3gl + iFl + g2. The last two formulae show that we can generate a rich class of GLes. We are particularly interested in versions which have a reflection symmetry with respect to either R(1)'(xi,x2) w-~ ( - x l , x 2 ) o r R(2)'(Xl,X2) ~-+ ( X l , - - x 2 ) . In the first case the coefficients have to satisfy al - bl -- Fl -- 0. This implies co -- 0 and ~" 6 R. Moreover, the group velocity Cgr is orthogonal to the wave vector of the periodic pattern, namely Cgr -'(0, b2 - a2) t. The diffusion matrix A0 may have purely imaginary off-diagonal coefficients. Using the Ginzburg-Landau formalism we find approximate solutions of (2.20) in the form u(t, X) ~ UA(t, X) -- 6A(62t, 6 ( x l , x2 -- (b2 - a 2 ) t ) ) e ir' + c . c . ,
where A solves the associated GLe. In the case with reflection R (2) the coefficients must satisfy a2 -- b2 --/-'2 -- 0. As a consequence co -- al - bl may be different from 0 and Cgr - - (3bl - a l , 0) t is the group velocity. The diffusion matrix is diagonal but with nonreal entries. The approximative solutions take the form
u(t,x) ~ UA(t,x) --eA(e2t, e(xl - ( 3 b , - a l ) t ,
x2))e i((a'-b')'+r') + c.c.,
where A solves the corresponding GLe.
2.6. A few other amplitude equations The theory of modulation equations is much more general than presented in this work. In many different contexts it is possible to employ a multiple scaling ansatz in the form given above. Equating equal powers to 0 one finds an equation for the desired amplitude function. This applies also to cases where several spectral bands become unstable. For each band we obtain an amplitude equation, and they are coupled nonlinearly, see, e.g., [93,40] and the references therein. Typically the coupling of these equations becomes nonlocal in ~ due to the different group velocities associated to the different spectral bands. The question of the mathematical justification of such systems is treated in [ 129].
774
A. Mielke
In hyperbolic systems, where the whole spectrum lies on the imaginary axis, the nonlinear Schr6dinger equation 0 r A - - i [ A ~ A + pA + yIAI2A]
(2.21)
appears as a modulation equation (p, ~, 6 ]K). The most important application in this case is the theory of water waves where modulation equations are used to study the nonlinear interaction of wave packages, see for instance [68,148,31 ]. Mathematical justifications in the sense of Section 6 for such kind of problems are given in [77,87,130,132]. We return to dissipative problems where the associated modulation equations are parabolic. Typical applications occur in hydrodynamics (with viscosity) or in chemical reactions. A first variant of the GLe occurs in the case when the linear theory is exactly as above, but the coefficient ~" of the cubic term vanishes. Such a situation occurs typically in multi-parameter systems when the additional parameter is chosen appropriately. In the Landau equation (2.14) the cubic coefficient satisfies
C"(~) --C" + #d'+ O ( # 2)
for # ---> 0.
We are now interested in the case ~" -- 0 and 3"# 0. With/z -- ps 2 and the scaling a(t) -sl/ZA(sZt) the Landau equation (2.14) produces the scaling limit (d/dr)A = p)~o, lA + pd'lAlZA + ~'(0)[AI4A. If modulations are also taken into account, then the linear part is the same as in the standard case by our spectral assumptions. The modulation ansatz takes the form u ( t , x ) - sl/ZA(sZt, s(x -Cgrt))E(t,x)~o.ko + c.c. and leads to the so-called
generalized GLe OrA -- div~ (AoV~A) + p)~o,,A + p'd[A[ZA + g'(0)lal4a + (VI, V~A)IAI 2 --]-(V2, V~A)A 2,
(2.22)
where Vl, V2 6 C d. This equation is sometimes also called the derivative GLe; in the case V1 = V2 -- 0 it is also called the cubic-quintic GLe. An analysis of this equation is given mainly for the spatially one-dimensional case, see, e.g., [12,49,38,144,46,80,82,119]. The mathematical justification of the generalized cGL is established in [128,118]. In many physical models there is an additional conservation law (e.g., conservation of mass) which implies that the operator L(#, 0) has an eigenvalue 0, which implies that for L(#, k) there is an eigenvalue family )~(0)(#, k). If this family is real and has the form )~(0) (#, k) = oe(/z)lkl 2 - fl(/z)lk] 4 + (Q(lkl 6) where fl(0) > 0, c~(0) = 0 and or' (0) > 0, then the ansatz u(t, x) = 8rv(84t, 8x)~o,o and # = ps 2 yields a modulation equation of CahnHilliard or Kuramoto-Sivashinsky type:
OrV -- -fl(O)A~v - pt~'(O)A~ v + f ( v , V$v, V~v), where f is homogeneous with f ( s r v , sr+lv, s r + 2 w ) = 8r+4f(v, V, W) which determines r. In the Cahn-Hilliard equation we have f = - A ( v 3) and r = 1; and in the
The Ginzburg-Landau equation in its role as a modulation equation
775
Kuramoto-Sivashinsky equation we have f = IVy] 2 which gives r -- 2. We refer to [92, 143,17] and the references therein for derivations of these amplitude equations. The question of justification is treated in [ 134] for the Kolmogorov flow problem in an infinite strip. For rotationally symmetric problems with x E R 2 the eigenvalue curve Z(#, k) is necessarily rotationally symmetric, i.e., we have Z(p, k) - Z(#, Ikl). If k0 :/: 0 then Re)~(/.t, k) -0 along a whole circle. Assume k0 = (r, 0) t and Z(#, k) 6 R, then it is natural to expand k = k0 + (etcl, el/zx2) and we obtain
zk(pe2, ko + (eKI, e l / 2 x 2 ) ) - e2(ZO.lP- A~
+ K2) 2) + O(e3),
with A ~ > 0. The parabola tel -- - x ~ / ( 2 r ) approximates the critical circle {k: Ik] - r} in the point ko. The associated two-dimensional modulation equation is called the NewellWhitehead equation [ 111 ] and reads
OTA -- A~
-i0~2)2A + ZO. lpA -~'IAI2A.
(2.23)
An analysis for the approximation properties of this formal equation is given in [ 126]. In hydrodynamical problems with two unbounded directions, like the Rayleigh-B6nard problem or the Poiseuille problem, there always appear additional modes due to the mean flow. To lowest order this additional equation couples an order parameter ~r 6 R (associated to the mean pressure) with the equation for the amplitude parameter A 6 C. This additional equation is typically elliptic, since the pressure in the Navier-Stokes equation does not appear with a time derivative. In [13,33] the following system is derived for the Rayleigh-B6nard problem between parallel plates:
OrA-
(0~, - i0~2)2A
+ pA -[A[
2A + i a 0~2 ,
0 - a~2~ + yla~, O~21AI2 + y2a~2 Im(AO~2A ).
(2.24)
In Section 3.3 we repeat the arguments in [69,32] for the perturbations of the Poiseuille flow close to the threshold of instability. We obtain the coupled system
OrA -- clO~ A + c2O~2A + pc3A + c4IAI2A + csA O~, ~, O-
div~ V ~ O + V
0
'
with cj E C and y 6 R, where Re ct > 0 for I = 1. . . . . 4. See (3.5) for the exact values of these constants. The mathematical justification of this system was given in [ 18].
3. Applications in hydrodynamics Historically the GLe was first derived in the context of hydrodynamics where the modulated periodic patterns can be seen in lots of experiments and in nature. Famous examples
776
A. Mielke
are cloud streets, water waves and the Taylor vortices of a flow between rotating concentric cylinders. First papers in this contexts were published around 1970, see for instance [ 111,137,35,112,69,32]. For this reason it is suggested in [92] to use the name "HockingStewartson equation" (after [69]) rather than "Ginzburg-Landau equation". In fact, the latter name is not derived from the present context of modulational theory but from its usage in the theory of superconductivity, see [62,45,23]. The connection between superconductivity and the modulation theory arises from the fact that in both cases the rGL plays a central role. In the following three subsections we present the basic cases in hydrodynamics where the Ginzburg-Landau theory is applicable. There are many other cases where the method of amplitude equations gives useful physical insight (e.g., in reaction-diffusion problems), however, due to the limited space we restrict ourselves. The fourth subsection introduces the theory of sideband instabilities which was one of the major driving forces for the development of the theory of modulation equations. 3.1. The R a y l e i g h - B d n a r d problem We consider a two-dimensional fluid layer of an incompressible viscous fluid between two rigid plates which are kept at two fixed temperatures. (In the three-dimensional case a more complicated amplitude equation appears, see (2.24).) After nondimensionalizing the velocity u = (u l, u2), the pressure p and the temperature deviation 0 from the linear profile between the two walls, we find the system Otu + (u . V)u + V p -
RO[~)'"" - A u = 0 , | div u -- 0, P(OtO + (u . V)O) - Ru2 - AO -- O,
f o r t ~> 0, ( x , y ) 6IR x (0, Jr),
(3.1)
together with the stress-free boundary conditions OyUl - - U 2 --- 0 - - 0 for y 6 {0, Jr }, see [111,35,96,13,99]. These boundary conditions are used only for mathematical simplicity, the more physical conditions u l -- u2 = 0 -- 0 can be done similarly, however the calculations can no longer be done analytically, see [33]. Here the parameter P is called the Prandtl number and R 2 is called the Rayleigh number. The latter parameter is considered as bifurcation parameter as it is proportional to the temperature difference at the two boundaries whereas P is a material parameter. For the analysis we insert the ansatz
l
Ul(t,x,y)
with
ofj E C
{OtlCOs(ny)~
u2(t, x, y) O(t, x, y)
= eZ,,t+ikx lot2 s i n ( n y ) / sin(ny)/
p ( t , x, y)
~kOt4cos(ny),]
into the linearization at (u, 0) = 0. We obtain the relation
+
+,,2 +
+
The Ginzburg-Landau equation in its role as a modulation equation
777
from which we derive that the critical parameter is R -- R0 = 3x/3/2, that is for R ~< R0 we have )~n(R, k) G(r/) for some ~(r/) < 0. The critical Reynolds number is then denoted by ~ 0 = Tr and we have k0 > 0. The associated eigenvalue is simple, and hence it is real. Moreover, the associated eigenvectors 4~r,,k must be rotationally invariant. Thus, for 7r = ~ 0 § Pe2 the GLe reads
OrA - - FlO~A + F 2 p A - F3]A]2A, where the real coefficients yj are all positive, the first calculation of these coefficients appears to be in [83] using the Liapunov-Schmidt reduction as in Section 2.2.2. We refer
The Ginzburg-Landau equation in its role as a modulation equation
779
to [74] and [24, Chapter VII] for the first rigorous derivation of the steady part of the GLe in the context of the Couette-Taylor problem. Since the eigenvector q}u,k is rotationally invariant it follows that all solutions which are constructed via the Ginzburg-Landau formalism
v(t,x, y ) - - Vcou + eA(e2t, ex)@o,ko(Y) +c.c. + O ( e 2) are also rotationally invariant. It was established in [135,136] that every perturbation of Vcou approaches the set of rotationally symmetric functions exponentially fast. Moreover there is an associated local attractor ,A in the set of all rotationally symmetric functions which attracts all solutions starting sufficiently close to Vcou, see the above references or Section 6.7 for more details.
3.3. The Poiseuille flow In contrast to the Rayleigh-B6nard problem and the Couette-Taylor problem the Poiseuille flow does not play such an important role in the theory of modulation equations for mainly two reasons 9 First, by now it is experimentally impossible to reach the theoretical threshold of instability which is at Reynolds number 5772 9149 Typical experiments see a stable Poiseuille flow for Reynolds numbers below 2500, while for larger Reynolds numbers the domain of attraction of the Poiseuille solution is too small to be realized by experimental conditions. The second reason involves the bifurcations which are predicted 9 It turns out that the real part of the cubic coefficient ~" in the cGL is positive rather than negative 9 Hence the associated bifurcations are subcritical and lead to unstable phenomena 9 Nevertheless the Poiseuille problem was historically important (cf. [69,32]) and it still serves as a problem on which one can test numerical and analytical methods. We mainly include it here as it is one of the few hydrodynamical problems which leads to a cGL with two unbounded directions. The Poiseuille flow occurs between two plates when a pressure gradient drives the system. Consider in nondimensional form the flow domain 12' = R 2 x ( - 1 , 1) with two unbounded directions x l and x2 and one bounded direction y E ( - 1 , 1). The velocity v(t, x, y) is now in R 3 with components vl, V2 and v3 in the direction xl, x2 and y. The basic equations are the Navier-Stokes equation with no-slip boundary conditions
3tv + (v 9V)v + V p - -R- A v -- 0 ' v = 0
divv--0
in s
(3.4)
on3~.
Here R = Uoh/v is the Reynolds number, where U0 is the typical velocity, h the height of the fluid layer and v the kinematic viscosity 9 The basic Poiseuille solution is Vpois(t, x, y) -- (1 - y2, 0, 0) t which is associated to the pressure p(x, y) = - 2 x l / R which gives a constant pressure gradient in x l-direction. We are now interested in small solutions around the basic Poiseuille flow. Since Vpois is independent of x E IR2 the classical ansatz u(t, x, y) = e ~t+i(/''x) ~ ( y ) can be inserted into the linearization at Vpois. The classical Squire theorem (cf. [32,2]) shows that instability
A. Mielke
780
first occurs with a wave vector parallel to the x 1-direction. In fact, numerically one finds that the critical Reynolds number is R0 ~ 5772.2 and the associated wave vector is k0 (1.0206, 0) t. The eigenvalue expansion can be found numerically and it reads ,k(R - R0, k) - ico + ,k0,1 (R - R0) - i(Cgr, k - k0) - ( A o ( k - ko), k - ko) + h.o.t. with co ,~ - 0 . 2 6 9 , ,k0, l ~ (0.168 + i0.811) 10 -5, r ~'~ (0.383, 0) t, A 0 ~ diag(0.187 + i0.0275, 0.00466 + i0.0808), see [32]. The associated eigenfunction can be expressed by the eigenfunction of the associated Orr-Sommerfeld equation ~ 0 : ( - 1 , 1)--+ C as ~0,k0 (y) - ((d/dy)qg(y), 0 , - i ( k 0 , el)cp) t, see [2]. However, as in the other two cases above the mean flow has to be taken into account. Since we have two unbounded directions we cannot restrict the mean flow of the solutions. Thus, one either has to reduce the problem to a problem with only one unbounded direction, e.g., by making it periodic in one of the directions, or we have to generalize the GinzburgLandau formalism. We prefer the latter idea, as it allows us to find the other cases also by reinterpreting the obtained modulation equation accordingly. To stay consistent with the normalization in [32] we let R = Ro + pe 2 with p = 1/ Re ~0,1, then the ansatz for the solutions u = v - Vpois of (3.4) takes the form
u ( t , x , y) -- eA(e2t, e(x - C g r t ) ) E ( t , x ) ~ o , k o ( y ) + c.c. + h.o.t., 2xl p(t, x, y) = po(t) -R- + e ~ ( e z t , e(x - Cgrt))E 0 + h.o.t., and equating the coefficients for el E m to 0 one arrives at the coupled system
Or A - A~ O~, A - A~
~0,1
- A -- Cl IAI2A - c2A 0~ ~ -- O, Re ~o, 1
[
div ~ V~ ~ 4- t'
(z )l 0
(3.5)
= O,
where Cl ~ 29.5 - i144, r '~ --28.0 4- i642 and y ~, 0.0453. The appearance of a second equation for the pressure perturbation r (which does not have a time derivative in it) is typical for all Navier-Stokes problems with two unbounded directions, see Section 2.6. We stayed within the frame of two unbounded directions as it serves as a model where the anisotropic cGL appears (argA~ --fi argA~ In fact, the formal approach here was made mathematically rigorous, in the sense of Section 6, in [ 18] for the full Poiseuille problem with two unbounded directions. It should be noted that flow problems with unbounded directions are not well-posed without suitable conditions at infinity. We either have to specify the mean flux or the mean pressure gradient to control the flow at infinity, see [5] for more details. For (3.5) this means that we may either prescribe an additional mean pressure gradient qJ E •2 via 7r(~, t) - (~, ~) + ~(~, t)
with ~(., t) bounded o n R 2
The Ginzburg-Landau equation in its role as a modulation equation
781
or an additional mean flux U e ]1~2 defined by 1 ~ [ (IA(se0t)12)] U = lim V~ 7z(~, t) + y d~. e--,~ 4~-y- ~(_e,e)2 Of course, we might as well prescribe certain components of tp and .T" and we may also make these quantities time-dependent. We can reduce to the case of one unbounded direction by restriction to special solution classes and thus obtain a classical one-dimensional GLe. First we consider solutions which are independent of x2 and hence the solutions of (3.5) are independent of ~2. If ,f'l is prescribed, the second equation can be integrated to 0~ 7z = - y I A ] 2 -4- f'l and inserted into the first to obtain
OrA-- AOIO~,A +
~.0.1 -Jr- f ' l c 2 ] A + (Cl - yc2)IAleA. Re)~0.1
(3.6)
We see that the additional downstream flux .T'l amounts in the same as redefining the Reynolds number. Note that prescribing tPl instead of f l leads to the condition tPl = ~0~, 7z~ - ~ l - ylal2~, where ~f]] --lime~c~ I fe_e/(~') d~. This gives 0~,7z - tPl + y~lA[2~ - ylAI 2 and we are lead to the nonlocal equation
O T A - AOIO~,A +
~.O, 1
Re,~o.l
-~-tPlc21A -f- (Cl
- yc2)IAI2A + yc2
~IAI2~A. (3.7)
Second, we may follow [2,4] and consider solutions of (3.4) which are periodic in downstream direction Xl with a period close to that of E. This amounts to looking for solutions of (3.5) of the form A(r, ~) -- e it~ A(r, ~2) and 7z(r, ~) -- ~ ( r , ~2) and we find
'~ f ~0,1 Or A -- A0220~2.4+ L R ~ o , 1
A~
X + c, IXl 2 A.
(3.8)
Here we have prescribed tPl = 0, and the associated problem with fixed f'l leads again to a nonlocal equation similar to (3.7), see [5]. Below we will show that for (3.6) and (3.8) there exist pulse solutions of the form A (r , ~j) -- dl eiVr [cosh(r/~j )]d2 with d l, d2 E C, v E JR, r / > 0 and Re d2 < 0. However, there is a major difference between the two cases with respect to the full Poiseuille problem (3.4). To prove the existence of such pulse solutions for the full Poiseuille problem one needs to use the reflection symmetry ~j ~ --~j which is present in (3.6) and (3.8). However, the full problem (3.4) is only invariant under the reflection x ~ (x l, - x 2 ) but not with respect to x ~ ( - x l, x2). As a consequence it is only possible to prove existence of reflectionally symmetric pulse type
A. Mielke
782
solutions for the case associated to (3.8), see [3,4]. The case associated to (3.6) was treated in [36] where existence of nonsymmetric pulses is shown by introducing a travel speed as an additional parameter.
3.4. Sideband instabilities Historically the theory of sideband instabilities in hydrodynamics was one of the major motivations for the development of the modulation theory. Here we want to explain this phenomenon and relate it to the stability treatment of plane waves in Section 4.1. We consider the full problem (2.1) for/z > 0 and assume that the cubic coefficient ~" in the GLe satisfies R e F > 0. For the linearization L (#, 0x) at u =-- 0 there is already an open set of wave vectors unstable:
/C(#) -- {k e R a" Re,k(#, k) > 0, (k, ko) ~> 0}, where/.(/z, k) is the critical eigenvalue of L(/z, ik) in (2.3). Under our spectral assumptions K~(#) forms a smooth region of nearly elliptical shape with center in k0 and diameter of order 4r~. Using the Liapunov-Schmidt reduction it is easy to show that for all k e K~(#) there exists a periodic solution u(t, x) = L/(#, k, t, x) of the nonlinear problem (2.1) in the form
U ( # , k , t , x , y ) - ~;u,k((, Y) -- )2u,k(( + 2re, y)
with ( = ~ t + (k,x)
where ~ ~ co is a new parameter (cf., e.g., [99]). Such solutions are called plane traveling waves as they only depend on one coordinate in the (t, x)-space. The first approximation of V~,k is given by Be i~ 4~u,k (y) + c.c. where B e C \ {0} satisfies the algebraic equation
i ~ B - - g ( # , k , IBI2)B
with g ( # , k , s ) - - X ( # , k )
- ~ ' s +h.o.t.,
cf. (2.14). This algebraic equation is of course compatible with the GLe since the lowest order term of ~u,k can be written as UA with A(r, ~) -- e i((~-c~176 B. By the principle of exchange of stability it is known that the solutions L/(#, k, t, x, y) are stable with respect to perturbations in the same function class, namely those which only depend on ((, y) with period 2zr in (. However, in experiments not all of these periodic patterns are observable, since some of them are unstable with respect to perturbations having a slightly different wave length. Thus, one is led to study the spectral properties of the linearization around the solution L/(#, k, t, x, y) in general function spaces:
Otw -- L(#, Ox)W + DuN(/z, O x , l g ( # , k , t , x , .))[w]. This leads to a differentialoperator with spatially periodic coefficients. Using the BlochFloquet ansatz w(t, x) -- e zt+(~'xl W((, y) the problem reduces to the spectral problem for a family of Bloch operators
~(~,#,k, Oc)W-~W
The Ginzburg-Landau equation in its role as a modulation equation
783
posed on the bounded domain S i x r . The vector cr E Ii~d is called the sideband vector of the perturbation, since W ( ~ ) = W ( ~ t + (k,x)) already contains the underlying wave vector k. By construction we know that ~(0, #, k, 0C)0r = 0 such that ~(o-, #, k) = 0 for o- = 0 E ]1~d. Moreover, ~ has discrete eigenvalues which can be expanded in cr close to 0. Define the set of unstable sideband vectors S(#, k) - {or 6 R Cl" It~(cr, #, k, .) has an eigenvalue ~" with R e ~ > 0} associated to the solution Vrt,k. If S(#, k) is nonempty then the periodic pattern Vrt,k is unstable. If S(#, k) intersects every neighborhood of cr = 0, then H is said to have an unstable sideband. (Note that 0 -J: S(#, k) if L/is stable with respect to periodic perturbations in r A general analysis of the Bloch-Floquet ansatz in hydrodynamics is given in [ 117]. Here we want to reveal the interplay with the Ginzburg-Landau formalism. In fact the solutions H(/z, k, t, x, .) constructed above have their counterparts in the plane waves Awave(r, se) = r e i(ar+(K'8))
with r 2 =
1 [pRe)~o.,-((ReAo)x,x)].
Re~"
The condition r 2 > 0 defines an ellipsoid which is the blowup of the set /C(#) = {k: Re)~(lz, k) > 0}. The stability of these plane waves as solutions of the GLe can now be studied much easier due to the phase invariance A w-~ ei'~A of GLe. Writing perturbations in the form A (r, ~) = A wave (1", ~ ) [ 1 + B (r, ~) ] we obtain a parabolic equation for B which is homogeneous in space-time. Hence, the spectral problem can be solved algebraically by using Fourier transform, see Section 4.1. In most physical papers the stability or instability of a periodic pattern H ( # , k,-) is directly inferred from the stability or instability of the associated plane wave for GLe. Yet, the given connection between the sideband instabilities of the periodic patterns H in the full problem and that of the plane waves in GLe is formal so far. However, in [97,99,100] it is shown that this connection can be made rigorous in many cases by using the principle of reduced instability and thus avoiding the Ginzburg-Landau formalism.
4. Special solutions and dynamics of the Ginzburg-Landau equation In the whole of this section we only consider the GLe without any reference to the full problem. This chapter is completely independent of the others. Hence we may use t ~> 0 and x E R ~t to denote the time and the space variable. We will also use the abbreviation Oj - - O/Oxj. Thus the GLe in its form (2.16) reads now d OtA -- Z ( 1
j= 1
+ iotj)OjA + pA - ( 1 + ifl)lAI2A.
(4.1)
A. Mielke
784
For the mathematical theory we introduce a few function spaces. The main point here is that we need appropriate spaces which enable us to study general nondecaying functions such as spatially periodic or quasiperiodic solutions as well as fronts, pulses or solutions with different periodic behavior at infinity. For domains s C ]1~n we define the weighted norm IIAIIL~ -
(jo
(4.2)
w ( x ) l A ( x ) [ p dx
and with LP(s we denote the associated Banach space. The weight w" I~d ~ (0, cx~) is assumed to be integrable over IRd and satisfies the estimate [Vw(x)[ ~ C w ( x ) . Throughout it will be sufficient to consider the weight w ( x ) = e -Ixl . The basis of the theory for unbounded domains are the uniformly local Sobolev spaces p Lul (s which are defined as follows. Let
"P Lul(S'2 ) -- {u
E
Lloc(S-2)" [[Ul[LupI O,
a 2 + a 24-4a3>~0,
a2a3 + a la2a4 -- a 2 >/O.
The first condition is always satisfied and the other two lead after the substitution 0 - r~ to a necessary and sufficient condition for (linearized) stability: 4({x, ~)2 _ {SK, ~)2) 0 for t 6 [to - e, to) and Ix - x0[ ~< e, then u(to, xo) -- 0 is impossible because of the maximum principle. This
A. Mielke
788
concept will be especially useful in the one-dimensional setting since the nodal lines are just points, see Section 4.2.2. 4.2.1. Ginzburg-Landau vortices. Strictly speaking Ginzburg-Landau vortices are steady states of the real Ginzburg-Landau equation on very large two-dimensional domains, see [14,76,113,90,75]. For simplicity we state the problem only o n •2 and refer to the references for the case of a domain which is large with respect to the natural length scale of the vortices. However, one still speaks of Ginzburg-Landau vortices when the solution looks locally like a steady state which moves slowly in space. The existence theory for single steady vortices can be found in [63] or the references in [ 14,145]. For each n 6 Z there is a unique vortex (up to translations and phase invariance) of degree (or vorticity) n. It can be written in the form V,(x) - oe,,(Ix I)e i'~~ where qg(x) - arg(xl + ix2) such that Ixlne in~(x) = (xl -I- ix2)", a,,(s) > 0 with or(s) ~ for s --+ cx~ and
1
n2
1
0 -- ot~ + -o~ ~ -- c~3 s= z +ce. s For this we use the fact that Aq)(x) = 0 and Vqg(x) = i x i - 2 ( - x 2 , x l ) t for x =/=0 which implies (Vet,, (Ixi), Vq)(x)) =--0. Moreover, we have an(S) = CnS I'i + O(slnl+')s-,O for some c,, > 0 and an(S) = 1 + O ( e - S ) s ~ o c . The case n = 0 is, of course, trivial with Vo(x) -- 1. It was shown in [145] that these steady states are unstable if in] ~> 2 and that they are linearly stable for ]n l ~< 1. In the unstable case the vortex generically breaks apart into In l vortices all having the degree sign(n). Interaction of vortices can be studied if we place a finite number of stable vortices in the plane R 2, say at the locations (j, and ask for the behavior of the solution A (t) = Gt (A0) of rGL with initial condition N
Ao(x)- I-I
(x-
(o)).
j=l
The locations x j ( t ) of the vortices for t > 0 are then defined via A(t, x j ( t ) ) = O. The interaction can be studied well if the initial conditions are such that N vortices of degrees nj - + 1 are spaced far apart from each other, namely z(0) >> 1 where z(t) = min{l~'j(t) - ~'m(t)l" j --/: m}. It turns out that the solutions remain approximately of the above form, namely N
A(t, x) -- H Vnj (x - r j=l
+ O(z(t)-')
for z(t) --+ co.
(4.10)
The Ginzburg-Landau equation in its role as a modulation equation
789
The locations xj (t) of the vortices are approximated by ~'j (t) which are obtained by solving an ODE for r = (~'l . . . . . ~'X) E R 2N. It is given as the gradient flow associated to the renormalized energy H (~_) -- - ~
n j nm log I~'j - ~'m I-
j#m
Thus the ODE ~" = - r e H(~') takes the form m
n in
~j -- -VCy H(~_) -- 2nj Z If j - Cml 2 (r - r m:/:j
j = 1 . . . . . N.
(4.11)
We refer to [76] for a mathematical justification of this approximation result in the case of large bounded domains. It remains only valid in the limit z(t) >> 1 which excludes collisions of the vortices. Typically a vortex of degree + 1 and and a vortex of degree - 1 attract each other such that z(t) goes to 0 in finite time, the two vortices of opposite degree collide and annihilate each other, i.e., they disappear into a trivial vortex of degree 0. A similar analysis can be made for the two-dimensional cGL with otl = cg2 = f l , which we write in the form OtA -- ( i + 6)(AA + A - I A I 2 A ) , where 6 ~> 0. In the case 6 = 0 we obtain a form of the nonlinear Schr6dinger equation. It is again possible to show that solutions of the form (4.10)exist, but now the locations ~j(t) satisfy the ODE
(
-n j
--6
VCj H (~_).
(4.12)
In particular, this system is Hamiltonian for 6 = 0, see [113,90,75] and the references therein. 4.2.2. One spatial direction. The one-dimensional rGL can either be considered on the real line with general initial data or on an interval (0, ~) with suitable boundary conditions. In the latter case we may have a gradient system with respect to the energy given in (4.8). In the first case all stationary solutions, which are solutions of the four-dimensional ODE A" + A - IAIZA = 0, can be classified (up to phase and translation invariance) as follows, see [57]: (a) real solutions A ( x ) = r ( x ) e IR where r" + r - r 3 = 0 (periodic or homoclinic r ( x ) = tanh(x/~/-2)); (b) rotating plane waves A ( x ) -- x/1 - t c 2 e iKx with IKI l / x / 3 converges to UKj for some xj 9 [0, 1/if3). But there is no proof of such a statement. There is a rather special property for rGL which generalizes the concept of "lap numbers" for scalar parabolic equations. We discuss this now for a bounded interval but it is clear that it can be transferred to the real line, if sufficient control over the behavior at infinity is obtained. Consider solutions A of rGL on (0, ~) and assume for the moment that A ( t , x ) =/=0 on (tl, t2) x (0,~) then the angle (k(t,x) in A = r e i~ is well defined up to multiples of 2zr. The key observation is that if 4~ has a local maximum at a point (to, x0) then the maximal value will decrease in time. Indeed, consider u(t, x) = Im[e-i4)(t~176 x)] which solves (4.9) and has a double zero at (to, x0). By the theory for scalar parabolic equations (cf. [22]) this zero will disappear, which means 4~(t, x) < 4~(to, xo) for t 9 (to, to + e) and Ix - xol < e with sufficiently small e. The analogous statement holds for minima of 4~. However, new minima and maxima can appear when the solution undergoes a so-called phase slip, which means that A(tl, x l) 9 C is 0. This occurs only at discrete points and typically O~A(tl,xl) =/=O. In such a situation 05 develops a jump of size o-zr with o- 9 {1, - 1 } before the phase slip and has a jump of size -or 7r directly after the phase slip. In the case of Dirichlet or Neumann boundary conditions for the interval (0, ~) it is shown in [22] that the torsion function O(t) = max qS(t, x) - min 4~(t, x) .r~(O,~) .r~(0.(~) is either constant along solutions or strictly decreasing, as long as no phase slips occur. As a consequence it can be shown that all solutions converge to a planar steady state (i.e., 4~ = const). For quasiperiodic boundary conditions we have the boundary condition 4~(t, g ) = 4~(t, 0) + ), + 2zrN(t) with N(t) 9 Z. Moreover, the above arguments show that the total variation Var(oS(t, . ) ) - s u p { ~ - ~ l d p ( t , x j ) - ~ ( t , j- 1
Xj_l)l" O 0 there is a unique solution (up to phase and z translation) /
satisfying f ( - o c ) -- V/1 - tc2 and f(cx~) - 0 . The general case is much more difficult and only partial results are known, see [50]. 4.2.3. D i f f u s i v e mixing. Here we are interested in solutions which behave like one stable pattern at x ~ + o e and like another one at x ~ - e e : A (t, x) - e i/~• UK+ (x) ~ 0
for x ~ + c e ,
(4.14)
where tc2 < 1/3. Clearly, if the initial condition satisfies these asymptotic boundary conditions, then the solution does for all times. Our concern is the dynamics of the system in the intermediate regime. The structure of (4.7) becomes clearer when using polar coordinates A = re i4~ giving rt = rxx + r (1 - r 2 - dp2),
dpt -- q~xx + 2 r x ~ x / r .
The underlying idea of diffusive repair and diffusive mixing is that for t --+ ec the derivatives rt and rxx tend to 0 in suitable norms, see [27,58]. In particular, this implies that asymptotically the amplitude r is slaved to the phase derivative q~x such that r 2 -- 1 - cb2 + O ( t - l / 4 ) . Hence, asymptotically the so-called phase diffusion equation ckt -- a ( ~ x ) ~ x x
with a ( s ) = (1 - 3s2)/(1 - s 2)
(4.15)
is relevant. The boundary conditions (4.14) imply ~ x ( t , x ) --+ x+ for x --+ -+-cx~.Hence, for r/(t, x) = ~ x ( t , x ) we obtain from (4.15) the problem rh -- (a(O)OX)x,
rl(t, x ) --+ x+
for x --+ l e e .
(4.16)
It is shown in [58, Theorem 3.1 ] that (4.16) has, for all x+, x_ E ( - 1/x/3, 1/x/3), a unique similarity solution r l ( t , x ) - " ~ ( x / x / 7 ) where ~ is monotone and attains its limits x+ and x_ faster than exponential. It satisfies the ODE [a(~'(~))~"(~)]'+ ~
(~)
for~ ~ IR.
(4.17)
With ,~(~) - x_~ + f ! ~ [ ~ ( s ) - x_] ds we define the time-dependent profile U(t,x)
-- V/1 - ~ ( x / x / r t ) 2 e i`/Tff(x/`/7).
(4.18)
The mathematical theory of diffusive mixing consists in showing that this profile is a good asymptotic approximation for the limiting behavior of suitable solutions A of rGL satisfying the boundary conditions (4.14). A first result was obtained in [20] for the case x+ ~ 0, the general case with x 2 < 1/3 is treated in [58] and provides the following result.
The Ginzburg-Landau equation in its role as a modulation equation
793
THEOREM 4.2. Let x+, x_ ~ (--1/x/3, 1/x/3) with x+ =/=x_. Then there exist to > 0 and s > 0 such thatforall Ao ~ H2ul(lR) satisfying IlA0-U(t0, .) IIH2(•) ~ s, the unique solution A (t) c H2ul(R) of rGL with A (0) -- Ao satisfies, for t --+ (x),
IlA(t)- ~(t0 + t,
IIIA(t)I-
and
I (,0 + ,, )111
9
Note that the assumptions use the nonweighted classical H2-norm while the results are stated in the uniformly local norm. This is due to the diffusive character which transports initially localized perturbations out to infinity. The second result in the theorem manifests the fact that the slaving of the amplitude r(t, x) -- lu(t, x)l occurs faster than the diffusive mixing which is mainly driven by the phase diffusion which has the decay rate 1/x/T. The above result says that the limit behavior of the solutions for t --+ cx~ is completely determined by the time-dependent profile U. From its explicit form we find the relation
I
-'/2)
f o r t ~ c~.
Here we again have to use the weighted norm, since a similar estimate in L2ul(IR) cannot hold due to the different limit behavior for x --+ oo of U ( t , x ) and eit~uK,. The values x, and 4}, are given via x, -- ~(0) and 4}, = N (0) ~: 0 and hence are well-defined functions of the limit values x+ and t>.0 are given by
f (t, x) -- - Re[(AA + A - I A I 2 A ) V A ] = - ( A r - rlVr 2 4- r - r3)Vr - (r2Ar + 2 r V r . V r 1 6 2
g(t,x) -- 10,Zl 2 - - ] A A -k- A - I Z l 2 Z ] 2 = (Ar - rlVr 2 + r - r3) 2 +(rAr162
2.
Returning to the one-dimensional case of diffusive mixing we employ the asymptotics derived in Theorem 4.2 and (4.18) and obtain the expansions (1 - 3~2)2~, 2
e(t,x) = h('~) + O(1/t),
g(t,x) = t(1 _~'2)
+0(1/te)
where h(r/) - - ( 1 - 72)2/4 and ~" and its derivative are evaluated at ~ - - x / x / 7 . Using (4.17) we find d
--Erel(A(t)) -- ~ Ote(t,x)dx dt
-- - f.r
oR
,f
g(t, x) dx = - - 2
eR
dd~ h (~(~))d~ + 0 ( 1 / t 3 / 2 ) .
Defining r/oc (~) = x+ for -1-~ > 0 we obtain via integration by parts d dt E r e l ( A ( t ) ) - - B(K_, 2~/'[x+) + 0 ( 1 /t3/2) ,
B(x_,x+)-
f
with
- h(~(se))] d~.
Clearly B(x_, x+) is strictly positive for x_ # x+. The energy density in the middle region tends to h (x,) which always lies below the average of h (x_) and h (x+), since the function h is convex on the 0-interval ( - 1 / x/3, 1/ x/3). In a situation with h (x_) < h (x,) < h (x+) the energy flux has to transport energy from the region x >> 1 via the region x ~. 0 to the region with x 0 we obtain exactly rescaled versions of the Ginzburg-Landau vortices, see Section 4.2.1. For the case ~., ~' < 0 there are infinitely many solutions for each n which decay exponentially for s -+ cx) and have k E No simple zeros, see [ 120]. By perturbation arguments it is then possible to prove that all these solutions persist for small imaginary part of ~', in the sense that there is an appropriate rotation speed y such that (4.25) still has a solution, see [ 120,121 ]. Existence results for spiral waves in general reaction-diffusion systems (which do not have the phase invariance of cGL) are given in [ 121 ]. Stability questions and further bifurcations of spiral waves are treated in [ 116].
4.4. Global existence f o r the complex Ginzburg-Landau equation The local existence of solutions is classical on either bounded domains or unbounded domains when suitable boundary conditions are added. Here we discuss the main ideas typical for GLe and refer to the literature for the standard technical details of parabolic systems of PDEs, see [44,9,41,43,61,88,98,101]. 4.4.1. Bounded periodic domain. We consider the domain $2 - 12e - ( - e l , el) • ... • (--gd, gd), which has volume 2d~l ... ~d, and complement cGL d
OtA - Z ( 1
2 + iotj)OjA + p A - (1 + ifl)lAI 2
on 12e
(4.26)
j=l
by periodic boundary conditions. This will allow us to do integrations by parts without worrying about boundary terms.
The Ginzburg-Landau equation in its role as a modulation equation
799
It is well known that smooth solutions exist locally in time and moreover, if a solution stays bounded in L p (I-2) for some p > d, then it exists globally and is analytic in space and time, see, e.g., [41,88]. In certain cases even distribution-valued initial conditions can be allowed [89]. Thus, global existence is established if we find a priori bounds of an appropriate L P-norm. The standard energy estimate reads
[A[P-ZA- OtA dx
[A[ p dx - Re
P
=-
d ~ QjP,l+io~(A) -Jrj=l
~' (A)--Reb fo
where Qj.b
[ plAIp - IAIP+2]dx
(4.27)
Oj([A[p-2-A)ajAdx.
Simple algebraic manipulations (cf. [98,101 ]) show that
QjPb(A) >~O,
if b E C satisfies Reb >~ 2 ~p/ p- - 2 1 [Imb[.
(4.28)
(In fact, under this condition the integrand RebOj(IAIP-2A)Oj A >~ 0 of QjP,b is pointwise nonnegative.) From this we derive a simple L p estimate if the linear dispersion parameters are not too large. Using
az
-
bz I+Y
~ ya([a/b] 1/• - z)
for all a, b, z, 9/> O,
we obtain the following result which implies that the LP-norm cannot blow up.
2N+l LEMMA 4.4. Assume 2 0, there exists a constant C > 1 which is independent of S21 and S-22 such that that the semiflows
IIs2 (..)-
c. ~< c e C t ( l l U l -
u2llL~, + [s
'/p)
(5.3)
for all uj E LuPl(~Qj) with Iluj I1~ ~ R. Here the second term on the right-hand side contains all the influence of the different domains and boundary conditions whereas the first term is a standard Lipschitz condition. In particular, if U l(X) = u2 (x) for Ix l ~< r < ~ then the first term is less than C[rd-le-r]l/P which provides a good control over the difference of the solutions over even smaller balls. An L ~ - v e r s i o n of 5.3 is provided in [102]. Using (5.3) and certain variants of it, it is not difficult to show the following upper semicontinuity results, see [98]. THEOREM 5.2. Under the above assumptions for each s > 0 there exists an s > 0 such that for all domains 1-2 C R d with {x: Ix] < g} C 12 and all bc E {Dir, Neu, Per} we have distL~ ' (Abnc, A IU) ~< s.
The Ginzburg-Landau equation in its role as a modulation equation
807
The remaining open problem is under what conditions we also have lower semicontinuity of the attractor, i.e., diStL(;. (A Rd , A~c) ~< e for suitably large domains s In the next subsection we give a simple example showing that lower semicontinuity is in general false. In our example the limit of A(bc e'e) for ~ --+ oc exists for each bc E {Dir, Neu, Per}, but it depends on bc and is strictly contained in .AR. ,/4R d is a problem of interchanging the limit The problem of convergence of AS2,, ~bc,, to t --+ oc in the definition of the attractors with the limit 12,, ~ R d. The interchange of such limits would only be possible, if the attraction rates for the attractors As2,, ~bc,, are uniform in n" however, this is in general not the case. In [65] a generalized limit attractor was introduced which allows for double limits where t,, --+ oc simultaneously with the parameter e,, --+ 0. In our situation this leads to the following definition. Consider a sequence (bc,, I2,),er~ of boundary conditions and domains which approach IRd in the sense that {x: [x l < g,, } C I2,, with ~,, --+ oo. Now set A* -- {u E LuPl(IRd)" 3t,, with t,, ~
oo 3u,, E LuPl(s2n)
with sup Ilu,, IIp.u~ < oo such that n EN
IIs ~, b(,,,, cu,,), - , u II ,, (R,, -+ 0 for n -+ oo,|. The motivation to consider A* rather than w-lim as2,, is that for practical purposes (e.g., ~bcn in experiments or numerics) we always have to consider finite time and b o u n d e d domains. Thus, one should neither prescribe the limit t ~ oo before n ~ oo nor the opposite, see [65] for a further discussion. THEOREM 5.3. For all s e q u e n c e s (bc,,, K2,,),,EH as a b o v e we h a v e fit* -- A Rd. PROOF. We first show A Rd C A*. To this end consider u E A Rd . As the sequence ~,, --+ oo for n --+ oo is given as above, we can choose a sequence t,, with t,, --+ oo such that the right-hand side in (5.3) tends to 0 if we use t = t,,, ~ = g,, and u l = u2. By the invariance of A S there exist v,, E A R,I C L/~I(R d) such that S R'~ (t,,, v,,) - u. Defining u,, E Llu'l(S-2,,) via u,, = v, Is2,, and using (5.3) we obtain the desired result u --
w-lim Ss2" (t,,, !l ~ O0 bCn
U I1
)
since IIv,, - u,, IIz~,~, can also be estimated by C [ g . d - l e - g " ] l/d. For the opposite inclusion we note that A* is contained in Babs and hence it is a b o u n d e d set in L~'I(IRJ) 9If we show that A* is also negatively invariant (i.e., A* c S R'' (t, A * ) for all t > 0), then we have the desired inclusion A* c A R' . Let u E A* and t > 0, then we have to find fi" E A* such that u - S R 'l (t, fi'). Take the sequence (t,,, u,,) with u -- w-lim v,, / / ----->OQ'
where
1)n
-- SS2" bcn (tn ' u,,)
808
A. Mielke
according to the definition of .,4". The sequence V'n = S s2''bc,'(tn - t, Un) is precompact in L p (IKd) and, after taking a subsequence if necessary, we have ~ ' - w - l i m n ~ s2" (t, v__) and (5.3) we conclude Vn ~ ,5'bcn
II " - s~' (,. ~)II.c
Vn. With
~< II. - Vb~... be.. , . "%') -- S~' ('. ~)II L~ ~" (, v,.)I1.~" + II SO"( ~< llu -- ",. II. ~; + Ce~'[ll"';.-
for n --+ c~ 9This gives the desired result u - ,SRJ (t, ~').
~'11. ~ + [e,; 'e-~"] '/'] > 0 U]
5.3. An example with different limit attractors We consider the scalar parabolic equation
ut - Uxx + f (u)
with f (u) = - u ( 1
-u) 2
(5.4)
for x e ( - g , ~) where g > 0. The essential feature of the nonlinearity f is that the ODE fi = f ( u ) has exactly two equilibria, namely u = 0 and u = 1. While u - - 0 is a stable equilibrium, the second equilibrium u = 1 is degenerate and semistable. If ~ < c~ we take one of the following boundary conditions: (Dir): u ( - ~ ) = u (e) = 0, (Neu): Ux(-~) = Ux(~), (Per): u ( - g ) = u(g) and U x ( - g ) = Ux(g). The initial value problem is well-posed and we have a global semiflow on L2ul((-g, ~)) which we denote by (S~c(t, "))t~>0. The associated attractors are denoted by .A~c. More general boundary conditions could be allowed, but this would complicate the notations and the analysis considerably 9 For ~ < c~ 1/~/2 there is a unique solution Zc which is monotone and satisfies z~.(0) = 1/2, z c ( - e c ) = 0 and Zc(eC) = 1. For Icl < 1 / v ~ there are no nonconstant bounded solutions and for c ~< - 1 / v / 2 we have the solution z c ( x ) = z - c ( - x ) . This shows that the limit attractor A ~ contains at least the two-dimensional set
: A , u { z c ( . - y): Icl ~ c,, y ~ R}. In the space L~, (R) this set forms a closed subset which is homeomorphic to the closed unit disk since Iz~.(x)l ~< K / I c l implies that z,.(. - cy) converges for c --+ ec to a constant function which depends smoothly and monotonically on y. Together we have shown w-lim Aeir ~ w-lim A~e u -- w - l i m j4~e r ~ ~ C J4Cx~. We conjecture that in this special situation we have/3 = .A~c. A similar conjecture for the nonnegative solutions of the Fisher-KPP equation u t = ux.r at- u - u 2 does not hold. There, the infinite-dimensional unstable manifold of u -= 0 is intersected with the cone of positive functions. In [66] it is shown that the associated attractor is infinite dimensional.
6. Justification of the G i n z b u r g - L a n d a u formalism
Finally we treat the question how good the formally obtained Ginzburg-Landau approximation really is. We recall the full problem Otu = L ( l z , Ox)u + N ( # , Ox, u)
(6.1)
810
A. Mielke
from (2.1) where u(t, .) :S-2 --+ R m is the unknown function on the unbounded cylindrical domain 12 -- ~a x r with r being a bounded cross-section. We will denote the solutions by u(t) = $~ (uo) where (S~)t>~o is a (local) semiflow. With/z -- pe 2 the modulation ansatz takes roughly the form u(t,
x)
-- UA
(t, x) -~- O(E2) where
UA (t, x) -- eA(e2t, e(x - Cgrt))ei(~176
+ c.c.
(6.2)
Here ico~0,k0 = L(0, ik0)~0,k0 and A(r, ~) solves the associated GLe
OrA -- div~ (AoV~A) + P~,o, 1A -- ~"IAI2A.
(6.3)
The solutions of the GLe are denoted by A(r) = ~r(A0) where (~r)r~>0 is the (local) semiflow. The questions we want to ask are the following. (1) What informations do we obtain for the full problem when studying the GLe? (2) Do solutions A of the GLe generate, via the modulation ansatz UA, good approximations of solutions of the full problem? (3) Are the solutions obtained from the Ginzburg-Landau formalism the typical ones which are seen in experiments? (4) Do special solution classes for the GLe correspond to similar solution classes for the full problem? If yes, can we deduce stability information for the full problem? (5) Are inertial manifolds or the attractor of GLe related to those of the full problem? Here we are, of course, interested in rigorous mathematical estimates. Our aim is to show existence of solutions which can be described by the GLe. Moreover, we want to emphasize that the Ginzburg-Landau formalism allows us to prove global existence for certain solutions of the full problem, e.g., for the three-dimensional Navier-Stokes equations, see below. We insist that it is not enough for the justification procedure to take nice solutions of GLe, insert them in the modulation ansatz and then show that the error in the full problem is small. Without further assumptions this does not say that the full problem has a solution which really behaves like this. A warning example is given in [ 126] where it is shown that the Newell-Whitehead equation (2.23) is a formal modulation equation which does not correctly predict the dynamics of the full problem.
6.1. Kirchgiissner reduction, spatial center-manifold theory The first mathematically satisfactory justifications of the GLe were given for the spatially one-dimensional case and were restricted to either time-independent solutions or timeperiodic solutions for the case )~(/z, k) 6/t~ and the case )~(0, k0) = ico # 0, respectively.
The Ginzburg-Landau equation in its role as a modulation equation
811
The main idea is to consider the full problem (6.1) as a spatial dynamical system where x 6 IR plays the role of time. Thus, we solve for the derivatives in x-direction and write the system as d - - v = K ( # , O~., Ot)v + F ( # , v) dx
(6.4)
where F is the nonlinearity and K the leading linear operator. The new variable is constructed using u and some of its x-derivatives, e.g., v = (u, Oxu) t if (6.1) was second order. Because of the relation between the two linear problems Otu = L ( l z , Ox, O~.)u and ( d / d x ) v = K(l~, O~., Ot)v we know that Jk = i~ is an eigenvalue of L ( # , ik) if and only if ik is an eigenvalue of K (tz, O,., i~). We temporarily reintroduced the cross-sectional derivatives O~. to display the generality of the approach. But further on we will drop O~, again. The spectral assumption for L ( # , ik) in Section 2 immediately provides spectral assumptions on K (/~, ico), namely spec K (0, ico) A i R = {ik0, -ik0}. These eigenvalues are geometrically simple, however, their algebraic multiplicity may be higher. It was proved in [2, Theorem 2.1 ] that the multiplicity is m if and only if Jk has the expansion )~(0, k) - ico + )~m.o(k - ko) m + O ( [ k - k0[m+l),
for some Jk,,,,0 6 C \ {0}. Thus, in the real case (case 1 in Section 2) and in the complex case with k0 = 0 (case 3) we immediately obtain m = 2. In the latter case we use )~(0, - k ) = )~(0, k). In case 2 we typically have Cgr = (d/dk))~(0, k0) -~ 0 and the eigenvalues are simple. The spatial center manifold reduction was first developed in [84], therefore it is also called Kirchg~issner reduction. This method reduces the original elliptic partial differential equation on a cylindrical domain to an ODE with respect to the axial variable. The method was further developed in [95] for quasilinear or non-autonomous problems. Timeperiodic problems are treated in [85,72,73]. To apply it we choose an appropriate phase space X, e.g., a closed subspace of [LZ(X')] 2m in the time-independent setting and of [ L 2 ( r • S 1)]2'" for the time-periodic case. Here r C ~'~ is the bounded cross-section of the cylinder s and S 1 denotes the time axis modulo the period. Thus, in the time-periodic case the real time variable t takes the role of a cross-sectional variable while x 6 IR is considered as unbounded time-like variable instead. To apply the center manifold theory we split the phase space X into X l @ X2, where X l is the spectral part of K (0, Ot) associated to the eigenvalues on the imaginary axis whereas X2 associates with all the remaining spectrum. Thus we have dim X l = 4 in case 1 and case 3 and dim X l = 2 for case 2. If p i : x --> x j are the associated spectral projectors, then (6.4) can be written as d dx vl - Kl vl + F1 (#, co, vl + v2),
d
m dx 1;2 ---- K21;2 -Jr- F2 (/A, o), V l -Jr- v 2 ) ,
where K j = K(O, a,)lxj, Fi(#, o), v) = Pj (K(#, 0,) - K(0, 0,) + F ( # , v)).
812
A. Mielke
Since the eigenvalues of K2 are bounded away from the imaginary axis, one expects that all small bounded solutions can be described by the critical variable vl alone. In fact, the spatial center-manifold reduction states that all small bounded solutions lie on a locally invariant manifold which is a smooth graph over a neighborhood of 0 6 X l: .A~ center -- {u1 - q - h ( ~ , c o , 1)1)" ]]u1]] ~ } .
This allows us to reduce the study of all small solutions which are bounded in x-direction to the ODE d dx
(6.5)
Vl - Kl Vl + F1 (#, co, Vl + h(#, co, Vl )),
where v2 was eliminated by the help of the reduction function h(/z, co, .) : XI --+ X2. We now consider the three spectral cases separately. CASE 1. )~(#, k) ~ R and ko :/: O. For this case dim X l = 4 and K1 has the eigenvalues +ik0 with a nontrivial Jordan block. Thus after choosing appropriate coordinates (A1, A2) E C 2 in X1 the ODE reads
dx
A2
(i 0 1) ()A,+ ( ,< AIA:AIA:> ) 0
ik0
A2
N2(#, AI, A2 AI A 2 )
(6.6)
'
where we have omitted the complex conjugate equations. Doing a normal form transformation up to cubic order we may assume that the nonlinearities N j have the form Nl(lZ . . . . ) -- ClAl
+O(IAll 3 + IA~I),
N2(#, .. .) -- c2AI -Jr-c3A2 + c41AI 12At -+- O( I A I 15 +1 A2A2 I + ]A2 13), where cj = Cj ( # ) are some complex constants with cj(O) ~---0 for j -- 1, 2, 3. As in the Ginzburg-Landau modulation ansatz we define B j ( x ) = - e - i k ~ and insert this into (6.6). The obtained ODE becomes x-dependent, however, only in the higher order terms:
dx
B2
c2
1 ) ( Bl ) c3 B2
+
(
) 2h.o.t. c4]Bl] Bl + h.o.t.
9
Now we can introduce the same scaling as in the modulation ansatz BI(e~) - - e A ( ~ ) , Bz(e~) = EZc(~) and # = pe 2 giving an ODE for (A, C) E C 2. Solving the first equation for C = (d/d~)A + O(e) we arrive at a second order equation for A (~): d~ 2 a - c'2(O)pa - c4(O)]A]ZA + g e, p, - A A 6'
'
'~-
A
'
-- O,
(6.7)
where g(e . . . . ) = O(e) for e --+ 0. Thus, after neglecting the small function g we find the steady one-dimensional GLe.
The Ginzburg-Landau equation in its role as a modulation equation
813
Of course, the final steps in this procedure are also formal like the derivation of the GLe itself. However, here we are only dealing with an ODE. By this way, neglecting certain terms of higher order can be justified more easily. However, the main purpose in using the Kirchg~issner reduction for the justification of the GLe is not to derive (6.7). We should rather say that (6.6) is the correct reduced ODE and this ODE can be studied rigorously by taking into account all higher order terms. For instance it is possible to show the existence of a family of periodic orbits which corresponds exactly to the family of rotating waves. Using the principle of reduced stability as discussed in [99,100] it is also possible to proof the stability results given in Section 4.1. We refer to [74] for more details and for a treatment of the Couette-Taylor problem as described in Section 3.2. A further discussion of the GLe as a normal form equation is given in [94]. There it is shown that the nonautonomous terms in (6.7) involving ~/e can be pushed to arbitrarily high order. CASE 2. ~.(0, k) = iw + i C g r ( k - k0) + h.o.t, with Cgr, k0 ~ 0. In this situation the center manifold is two-dimensional and the ODE can be written as d
--B--ikoB+N(#,~,B,B) dx on the center manifold and it cannot be directly related to the GLe, see [72, Section 4]. This system is SO(2)-invariant under the transformation B ~ e ir B as a consequence to the time-invariance of (6.4). We trivially obtain solutions of the form B(x) = r e ik with k ~ k0 which correspond to the rotating waves of GLe. CASE 3. k0 = 0 and ~(0, O) = iw. We again have dim Xl = 4. The operator Kl has an algebraically four-fold eigenvalue which is geometrically two-fold. After some normal form transformation the ODE can be written as
dx
ce(kt ~)
1 ) (
c3(#,~)
+
h.~ 89
c4(/z,~)lAl
Al+h.o.t.
)
"
(6.8)
Again the system is SO(2)-invariant under the transformation B ~-~ e i'k B as a consequence of the time-invariance of (6.4). We employ the scaling ~ -- ex, Al -- eA, A 2 - - ~ ' 2 C , / 2 - - p~,2 and ~ -- co + eo-, then we solve the first equation for C as a function of A and d A / d ~ to obtain the following second order ODE for A (~):
d2
d
(
dd
t
d---~A + bla--~ A + ( b2p + b3a2) A + b4I A I2A +"g e, p, a, A, A, --d-~A, -d-~-A - 0 . (6.9)
814
A. Mielke
This case was treated in [73] and applied to a reaction-diffusion system. In [2,4] the spatial center-manifold reduction was used to prove existence of periodic and multi-pulse solutions (cf. Section 4.3.1 above) for the Poiseuille problem as described in Section 3.3. 6.2. The approximation property We now return to the full time-dependent problem and want to study the approximation properties of the modulation ansatz when evaluated along solutions of the GLe. The general idea is to use the modulation ansatz as a first guess of the solution, insert the function u(t, x) = VA (t, x) + r(t, x) in the full problem and then try to show that the remainder remains small for all x 6 R d and for sufficiently long times. Here it is important to recall that the solutions A(r, ~) have to be rescaled via t = ezr when they are inserted in the full problem. To see the flow of the GLe acting on an initial condition A (0, .) we have to observe the solution for r in an interval [0, r0] with r0 > 0 independent of e. Hence, in the full problem the relevant time interval for t is [0, r0/e 2] which is a very large time scale. Inserting u = VA + r with VA = UA + O(e 2) in (6.1) we obtain the equation
Otr = LEr + N ( # , VA + r) -- N ( # , VA) -- Res(VA)(t, x), with
ReS(VA) -- Ot VA -- L ( # , Ox) VA -- N ( # , VA),
(6.10)
where Le = L ( p e 2, Ox). The term Res(Va) is the residual which we obtain upon insertion of VA. Assuming that A is a solution of the GLe (6.3) and by including suitable corrections into VA -- UA + O(e 2) we can arrange things such that Res(Va) is sufficiently small, let us say o ( e m ) . Moreover, the nonlinearity N ( # , .) satisfies a Lipschitz continuity
IIN 0 fixed and mRes(t) ~< CR 6j, mVA (t) ~ 2 since the prefactor Dze-ZCN(CAe) " must be bounded independently of e. These simple arguments can be made rigorous for the problems with cubic nonlinearities, see [26,87] and [105, Section 3.1]. However, for general problems, e.g., those in hydrodynamics, another approach is needed. This was introduced in [142] and further developed in [ 122,19,127]. Applications to several hydrodynamical problems are now available, namely in [ 123] for the Rayleigh-B6nard problem, in [18] for the Poiseuille problem and in [135,136] for the Couette-Taylor problem. The general observation which is behind the analysis is that the modulated solutions of the basic pattern have Fourier transforms which are strongly concentrated around the two points +k0. Through nonlinear interactions these Fourier clusters generate new modes around the points mko with m 9 Z. However, modes with [ml ~ 1 are not critical and hence they are exponentially damped. In particular, quadratic interactions of the basic pattern generate only modes with m 9 {-2, 0, 2}. Thus, the basic observation is:
Quadratic interactions of critical modes are noncritical.
(6.11)
So far the argument was only true under the assumption k0 ~- 0. However, the case k0 -- 0 with X(0, 0) -- i~o ~: 0 can be treated as well since a similar mode coupling occurs in spacetime, see [ 131 ]. We now give the mathematics in more detail. We consider (6.1) in suitable function spaces Y C X, which contain modulated solutions. Typically one takes Y and X in the form [W~in(Y2)] m with ky >~kx. Now assume that A ' [ 0 , rl] • ]Kd --+ C is a given solution of the associated GLe. Moreover, we use a modulation ansatz VA (t, x) -- UA + O(s:) such that the associated residual Res(VA), see (6.10), satisfies an estimate
IlRes(Va)( t,
")llx CR
fort 9 [0, r,/s2].
This can always be achieved by using the fact that solutions of GLe are arbitrarily smooth and then doing the formal expansion of Section 2.2.2 to the desired high order, see, e.g., [74,106]. The main functional analytic tool involves the splitting of the critical modes (also called Ginzburg-Landau modes) and the remaining stable modes. This cannot be done in a simple manner as we have to cut through the continuous spectrum of the operator L~. Hence we do not define an exact splitting using projections but use filters Ec and Es instead of projections Pc and P~. (Here 'c' and 's' are abbreviations for 'central' and 'stable'.) The filters are defined such that Ec + Es = Ix and, if we define the spaces X~ -- closure(E~ X) for ot 9 {c, s}, then E,~ X~ = X~. Note that Ec Es ~ 0, and hence Xc N Xs is still an infinite dimensional subspace containing some stable modes.
816
A. Mielke
The construction of Ec is done by the help of Fourier transform. We choose a small 6 > 0 independent of e and a smooth cut-off function X+k0 :R d ~ [0, 1] with X+k0 (k) = 1 if Ik - k0[ ~< 6/2 or Ik + k0l ~< 6/2 and X+k0 (k) = 0 if Ik - k0l ~> 6 and Ik + k01 ~> 6. Using the eigenfunction ~'pez,k of L(pe 2, ik) associated to the eigenvalue )~(pe 2, k) together with the eigenvector q~* p82, k ) = 1 we define Ec through p~2,k of the adjoint problem with (q~psZ,k q~* its Fourier transform
f~ [E~u](k)- X+ko(~:)(f~[u](~:), r
k)q'p~ k.
(6.12)
Here the functions q~ and q~* of k need only be defined in the two balls of radius 6 around k0 and - k 0 . This formula is certainly well-defined for functions u 6 L2(~2) and it is established in [123, Lemma 5] that the operator Ec is a bounded linear operator from L2ul(S-2) into This arises from the fact that all q~e,k are smooth functions of y 6 r and that the Fourier transform in x-direction of Ecu is localized. Additionally the construction is such that Ec commutes with Le, i.e., EcLe = LeEc. By this definition Ec depends on e, but for notational convenience we suppress the dependence. We can now write solutions u(t) of (6.1) in the form u(t) = Uc(t) + Us(t) with u~(t) X,~. However, we warn the reader that generally u~ =/: E~u since we define the two parts via
wk'2(S'2).ul
OtUc = Leuc + EcN(e, Uc + Us),
OtUs = Leus + EsN(e, Uc + Us).
(6.13)
The quantitative version of the quadratic interaction principle (6.11) takes the form
IIEcN(~,
uc>llx
-
O(ll,,c ..~).
To be more precise we make the following assumptions on the nonlinearity:
IIE~[N(~,Uc +u~>- N(e, ~c-Jr-~)] II~ CN ([ ttUc tRY+ I1~c [Iy]n~ + liU~ tt~ + II~ I1~)11Uc -- ~c 11~ (6.14) where nc - 2 and ns - 1. Of course, this is assumed to hold only for Ilu~ IIY, I1~ IIY ~ ~1. The linear operator Le generates a semigroup which, by construction, satisfies the estimates
Ile"~ [Ix _+~c ~< Ce c~:t,
Ile"~ I1~_~ ~ ~< Ct-~e-•
Ile"~ II~s_~, ~< Ce -• for t > 0, where C, y > 0 and/3 ~ [0, 1). The approximation result can now be formulated as follows.
(6.15)
The Ginzburg-Landau equation in its role as a modulation equation
817
THEOREM 6.1. Let the above assumptions be satisfied. Choose any rl > 0 and any solution A = A(r, ~e) :[0, rl] x F~d --+ C of the GLe (6.3). Assume that there are x > 1, so > 0 and C R, CA > 0 such that VA is an approximate solution of (6.1) with
IIv~(,, .)I1~ ~ 0 there exist el ~ (0, s0) and C > 0 such that for all s ~ (0, s l) the following holds. If the initial datum uo ~ Y satisfies
I E c [ u o - VA(O, ")] [y ~< De z
and
IIE~[uo- va(o,.)]llY ~ o~max~"~-'~'
then the unique solution u(t) = S t ( u o ) of (6.1) exists for t ~ [0, rl/S 2] and satisfies the estimates
IE~[,(,, .)- va(,,-)] II~ ~/~. The approximate inverse is defined as
.k } + C .c.] ,
xo(k) -- 1 for Ikl ~< 6/2 and - - 0 for
Y---> Z, Me"
u ~-~ e d - , f - : ,
(6.19)
{X0(ex)(45;e2.ko+e K, [ f x u l ( k o + E~))}.
(6.20)
For sufficiently smooth A 9 Z we have A = Me[KeA] + O(e) for e --+ 0 and Ecu = Ke[MEu] + O(e), compare to (6.12) and see [124] for the proofs. In order to formulate the following results as simple as possible we restrict our attention to one particular equation for u, namely the one-dimensional version of (2.20):
OlU - - - - (1 -Jr- 02)2// -+- b(3 -Jr- 02)0xt/ Jr- 8 2 u - - u 3 + g u 2 Oxu, x
(6.21)
which has the associated one-dimensional cGL 0rA--
(4+ib)O2A
+
A
-
(3 -
ig)lAI2A
(6.22)
We formulate the following result with the notations of the general setting, since most of them carry over up to additional technicalities (e.g., due to Sobolev embeddings or different scaling factors depending on the number of unbounded directions). This might change the exponent rr and the underlying spaces but not the general structure of the theory. See Section 6.7 for an application of these principles to the Navier-Stokes equations. For the above equations the function spaces can be chosen as X -- Leul(IE, R), Y -H ul(IE, l 1 R) and Z -- Hul(R, C). In particular, Theorem 6.1 is applicable with fl -- 1/4 for these choices. The operators Ke and Me (which, in the present case, simplify a lot due to cb~2.k -- aS~2,k -- 1) satisfy
IIK~AIIy 0 and all constants C and C (r) are independent of e > 0. While the first estimate is trivial, the second estimate shows that rescaling yields an additional bad factor e - l .
820
A. Mielke
However, this factor disappears if we let act the linear semiflow for a suitable long time, see Section 2.2.1. Thus, in the linearized flow every solution u(t) = etL~uo is attracted to a modulated pattern, namely u ( r / e 2) -- K~A, + O(e 2)
with A, -- Meu(r/e2).
The following result (see [ 105,106]) is the nonlinear version of this basically linear effect. THEOREM 6.2. Consider Equations (6.21) and (6.22) with the given function spaces X, Y and Z. For all C1 > 0 there exist Co, eo, r0 > 0, such that the following is true. For all e (0, eo) and uo ~ Y with Ilu0llv 0 and d ~< 2) the solution A(r) = ~r (A0) exists for all time (see Section 4.4) and rl can be chosen arbitrarily. Having Theorem 6.2 it is possible to apply the approximation theory of the previous section. In particular, the assumptions of Theorem 6.1 are fulfilled if we choose u(0) = S ~ r0/~2(u0) , and A(0) ~ A1 and take any time rl > 0 such that A(r) ~r(A1) exists for r e [0, rl].
6.4. Shadowing by pseudo-orbits and global existence Finally we consider the case where the GLe has a global semiflow with a global attractor ,AGE, see Sections 4.4 and 6.5. Hence, we may use the approximation property as well as the attractivity to control all small solutions u(t) = S~ (uo) of the original problem (6.1) for arbitrarily long time intervals. The idea is to use the attractivity property in a first step
The Ginzburg-Landau equation in its role as a modulation equation
821
to find the modulated structure u('~0/8 2) -- [K~A',] + 0 @ 2) where A'l = M~u(ro/s2). In a second step the solution can be described over a time interval ['roA/e2, (to + Zl)/e 2] by the Ginzburg-Landau approximation UA~ (t) with A1 (z') : ~r-r0 (A 1). At the end of this interval the error between the true solution and the approximation might be somewhat larger; however, from the attractivity we know that u((r0 § r l ) / e 2) is close to a different modulated pattern K~ A2 from which the approximation theory may start on the next time interval. The exponential attractivity of the absorbing ball for the GLe controls the size of the solution A j, j c I%1,and guarantees their uniform boundedness for all r >~ r0. In this way we can shadow the true orbit u(t) -- S t (uo) for all t > 0 by a sequence of solutions of the GLe. DEFINITION 6.3. Let r, > 0 and 6 > 0. A function A E L~((0, ~ ) , Z) is called a (r,, 6)pseudo-orbit in Z for (6.1) if for all n 6 N the relations A((n-
1)z, + r ) - - ~ , : ( A ( ( n -
1)T,))
for all r E [0, z,),
[ I A ( n r , - O ) - G r , ( A ( ( n - 1)r,)) 1[z ~ 0 and ~ e R. The period g > 0 is considered to be fixed. In particular, we choose the appropriate phase space Xe,per -- {U" E H~oc(R)" ~'(~ + g) -- h'(~) for all se e R}. With the modulation ansatz (6.27) this gives the quasiperiodic boundary condition A (~ + g) = e iz A(~) with y = (e/e) mod2zr. Thus, the associated phase space for the GLe is Ze,•
{A e H~oc(IR, C)" A(se + g ) - ei•
all ~ EIR}.
Because of the new boundary conditions it is a slight variation of a classical result that the rGL (6.28) restricted to the phase space Ze,• has an inertial manifold, see, e.g., [44, 141]. Particularly, the eigenvalues of the linear part are given by )~n -- 1 - 4 ( y + 2zrn)2/g 2, n e Z, and thus there are sufficiently large spectral gaps. To compare the two quite different systems (6.26) and (6.28) we have to decompose both phase spaces into three parts: Xe,per = X1 (~ X2 (~ X3,
Ze,• = Zl 9 Z2 9 Z3.
The Ginzburg-Landau equation in its role as a modulation equation
825
These decompositions are associated with the spectral parts of the linear operators such that X l, Z l contain the largest eigenvalues, X2, Z2 the intermediate ones, and X3, Z3 the smallest ones (going to - c ~ ) . The important point is that there are isomorphisms Tj : Xj Zj for j = 1,2 which make the two systems comparable. However, we do not need to compare X3 with Z3, as the contributions of these subspaces on the flow reduced to the inertial manifold will be small. For the rGL and assuming V 9 (-zr, 7r] we define the subspaces
Zj = span{e i(2Jrk+z)~/e, ie i(2~k+z)-~/e" k 9 Jj(nGL, y, e) } where the index sets are given by Jl (nGL, y , e ) -
{k 9 Z: [k -+- •
I ~ 0,
where C, ot > 0 are independent of ~ ~ (0, e0). Finally we mention that the existence of modulated front solutions in the Couette-Taylor problem is established in [67]. These solutions correspond via the ansatz (6.31) to simple front solutions A(r, ~) = A(~ - Cfront'g) of (6.30) where Cfront : (..O(e). However, the existence proof does not use the Ginzburg-Landau formalism; it is rather based on a singular version of the Kirchg~issner reduction for time-periodic parabolic problems as described in Section 6.1.
References [1] E Abergel, Existence and finite dimensionali~ of the global attractor for evolution equations on unbounded domains, J. Differential Equations 83 (1990), 85-108. [2] A.L. Afendikov and A. Mielke, Bifurcations of Poiseuille flow between parallel plates: three-dimensional solutions with large spanwise wavelength, Arch. Rat. Mech. Anal. 129 (1995), 101-127. [3] A.L. Afendikov and A. Mielke, Bifurcation of homoclinic orbits to a saddle-focus in reversible systems with SO(2)-symmetry, J. Differential Equations 159 (1999), 370-402. [4] A.L. Afendikov and A. Mielke, Multi-pulse solutions to the Navier-Stokes problem between parallel plates, Zeits. Angew. Math. Physik (ZAMP) 52 (2001), 79-100. [5] A.L. Afendikov and A. Mielke, Nonlocal modulation equations for viscous fluid layer problems and persistence of spatially localized perturbations, Zeits. Angew. Math. Mech (ZAMM) Suppl. (2000) (submitted). [6] EJ. Aston and C.R. Laing, Symmetry, and chaos in the complex Ginzburg-Landau equation. I: reflectional symmetries, Dynamics Stabil. Systems (1998) (to appear); and H: translational symmetries, Phys. D (1999) (to appear). [7] A.V. Babin and M.I. Vishik, Attractors of partial differential equations in an unbounded domain, Proc. Roy. Soc. Edinburgh Ser. A 116 (1990), 221-243. [8] A.V. Babin and M.I. Vishik, Attractors of Evolution Equations, North-Holland, Amsterdam (1992). [9] M.V. Bartucelli, P. Constantin, C.R. Doering, J.D. Gibbon and M. Gisself~ilt, On the possibili~ of soft and hard turbulence in the complex Ginzburg-Landau equation, Phys. D 44 (1990), 412-444. [10] M.V. Bartucelli, J.D. Gibbon and M. Oliver, Length scales in solutions of the complex Ginzburg-Landau equation, Phys. D 89 (1996), 267-286. [ 11] E Bechouche and A. Jtingel, Inviscid limits of the complex Ginzburg-Landau equation, Pr6publ. No. 545, Universit6 de Nice (May 1999). [12] N. Bekki and B. Nozakki, Formation of spatial patterns and holes in the generalised Ginzburg-Landau equation, Phys. Lett. A 110 (1985), 133-135. [13] A.J. Bernoff, Finite amplitude convection between stress-free boundaries; Ginzburg-Landau equations and modulation theory,, European J. Appl. Math. 5 (1994), 267-282. [14] E B6thuel, H. Brezis and E H61ein, Ginzburg-Landau Vortices, Birkh~iuser, Basel (1994). [ 15] W.-J. Beyn, W. Klel3and V. Thtimmler, A continuation framework for invariant subspaces and its application to traveling waves, Proc. of the Conference SCC II, TU Hamburg-Harburg, W. Mackens, H. Vo13and E Keil, eds, 1999 (to appear). [16] W.-J. Beyn and J. Lorenz, Stabili~ of traveling waves: dichotomies and eigenvalue conditions on finite intervals, Universit~it Bielefeld, SFB 343, Preprint 98-094 (1998).
830
A. Mielke
[ 17] T. Bohr, M.H. Jensen, G. Paladin and A. Vulpiani, Dynamical Systems Approach to Turbulence, Cambridge Univ. Press, Cambridge (1998). [18] E Bollerman, On the theory of validity of amplitude equations, Ph.D. Thesis, Utrecht University (1996). [ 19] E Bollerman, G. Schneider and A. van Harten, On the justification of the Ginzburg-Landau approximation, Nonlinear Dynamics and Pattern Formation in Natural Environment, A. Doelman and A. van Harten, eds, Pitman Res. Notes, Vol. 335, Longman, Harlow (1995), 20-36. [20] J. Bricmont and A. Kupiainen, Renormalization group and the Ginzburg-Landau equation, Comm. Math. Phys. 150 (1992), 193-208. [21] T.J. Bridges and G. Rowlands, Instability of spatially quasi-periodic states of the Ginzburg-Landau equation, Proc. Roy. Soc. London Ser. A 444 (1994), 347-362. [22] M. Btiger, Torsion numbers, a tool for the examination of symmetric reaction-diffusion systems related to oscillation numbers, Discrete Cont. Dynam. Systems 4 (1998), 691-708. [23] S.J. Chapman, S.D. Howison and J.R. Ockendon, Macroscopic models for superconductivity, SIAM Rev. 34 (1992), 529-560. [24] E Chossat and G. Iooss, The Couette-Taylor Problem, Springer, Berlin (1994). [25] P. Collet, Thermodynamic limit of the Ginzburg-Landau equations, Nonlinearity 7 (1994), 1175-1190. [26] E Collet and J.-E Eckmann, The time-dependent amplitude equation for the Swifi-Hohenberg problem, Comm. Math. Phys. 132 (1990), 139-153. [27] E Collet and J.-E Eckmann, Solutions without phase-slip for the Ginsburg-Landau equation, Comm. Math. Phys. 145 (1992), 345-356. [28] E Collet and J.-E Eckmann, Extensive properties of the complex Ginzburg-Landau equation, Comm. Math. Phys. 200 (1999), 699-722. [29] E Collet and J.-E Eckmann, The definition and measurement of the topological entropy per unit volume in parabolic PDEs, Nonlinearity 12 (1999), 451-473. [30] E Collet, J.-E Eckmann and H. Epstein, Diffusive repair for the Ginsburg-Landau equation, Helv. Phys. Acta 65 (1992), 56-92. [31] W. Craig, C. Sulem and EL. Sulem, Nonlinear modulation of gravity waves, Nonlinearity 5 (1992), 497522. [32] A. Davey, L.M. Hocking and K. Stewartson, On the nonlinear evolution of three-dimensional disturbances in plane Poiseuille flow, J. Fluid Mech. 63 (1974), 529-536. [33] W. Decker and W. Pesch, Order parameter and amplitude equations for the Rayleigh-B~nard problem, J. Phys. II France 4 (1994), 419-438. [34] E Deift, C.D. Levermore and C.E. Wayne (eds), Dynamical Systems and Probabilistic Methods in Partial Differential Equations, Lecture Appl. Math., Vol. 31, Amer. Math. Soc., Providence, RI (1996). [35] R.C. DiPrima, W. Eckhaus and L. Segel, Nonlinear wavenumber interaction in near critical twodimensional flows, J. Fluid Mech. 49 (1971), 705-744. [36] A. Doelman, Traveling waves in the complex Ginzburg-Landau equation, J. Nonlinear Sci. 3 (1993), 225266. [37] A. Doelman, Breaking the hidden symmetry in the Ginzburg-Landau equation, Phys. D 97 (1996), 398428. [38] A. Doelman and W. Eckhaus, Periodic and quasi-periodic solutions of degenerate modulation equations, Phys. D 53 (1991), 249-266. [39] A. Doelman, R.A. Gardner and C.K.R.T. Jones, Instability of quasi-periodic solutions of the GinzburgLandau equation, Proc. Roy. Soc. Edinburgh Ser. A 125 (1995), 501-517. [40] A. Doelman and V. Rottsch~ifer, Singularly perturbed and nonlocal modulation equations for systems with interacting instability mechanisms, J. Nonlinear Sci. 7 (1997), 371-409. [41] A. Doelman and E.S. Titi, Regularity of solutions and the convergence of the Galerkin method in the Ginzburg-Landau equation, Numer. Funct. Anal. Optim. 14 (1993), 299-321. [42] A. Doelman and A. van Harten (eds), Nonlinear Dynamics and Pattern Formation in Natural Environment, Pitman Res. Notes, Vol. 335, Longman, Harlow (1995). [43] C.R. Doering, J.D. Gibbon and C.D. Levermore, Weak and strong solutions of the complex GinzburgLandau equation, Phys. D 71 (1994), 285-318. [44] C.R. Doering, J.D. Gibbon, D.D. Holm and B. Nicolaenko, Low-dimensional behaviour in the complex Ginzburg-Landau equation, Nonlinearity 1 (1988), 279-309.
The Ginzburg-Landau equation in its role as a modulation equation
831
[45] Q. Du, M.D. Gunzburger and J.S. Peterson, Analysis and approximation of the Ginzburg-Landau model ofsuperconductivi~, SIAM Rev. 34 (1992), 54-81. [46] J. Duan, E.S. Titi and P. Holmes, Global existence for a generalized Ginzburg-Landau equation, Nonlinearity 5 (1992), 1303-1314; and, Regulari~, approximation and asymptotic dynamics for a generalized Ginzburg-Landau equation, Nonlinearity 6 (1993), 915-933. [47] W. Eckhaus, Studies in Non-Linear Stabili~' Theoo', Springer Tracts in Nat. Philos. 6, Springer, Berlin (1965). [48] W. Eckhaus, The Ginzburg-Landau manifold is an attractor, J. Nonlinear Sci. 3 (1993), 329-348. [49] W. Eckhaus and G. Iooss, Strong selection or rejection of spatially periodic patterns in degenerate bifurcations, Phys. D 39 (1989), 124-146. [50] J.-P. Eckmann and T. Gallay, Front solutions for the Ginzburg-Landau equation, Comm. Math. Phys. 152 (1993), 221-248. [51] J.-P. Eckmann, T. Gallay and C.E. Wayne, Phase slips and the Eckhaus instabili~, Nonlinearity 8 (1995), 943-961. [52] J.-P. Eckmann and J. Rougemont, Coarsening by Ginzburg-Landau dynamics, Comm. Math. Phys. 199 (1999), 441-470. [53] M. Efendiev and A. Miranville, Finite dimensional attractors for reaction-diffusion equations in It~n with a strong nonlineari~, Discrete Cont. Dynam. Systems 5 (1999), 399-424. [54] M. Efendiev and S. Zelik, The attractor for a nonlinear reaction-diffusion system in an unbounded domain, Preprint No. 505, WIAS, Berlin (1999). [55] E. Feireisl, Bounded, locally compact global attractors for semilinear damped wave equations on ~n, J. Differential Integral Equations 9 (1996), 1147-1156. [56] G. Fibich and D. Levy, Self-focusing in the complex Ginzburg-Landau equation limit of the critical nonlinear SchrOdinger equation, Preprint Tel Aviv University (June 1998), Phys. Lett. A (submitted). [57] T. Gallay, Periodic patterns and traveling fronts for the Ginzburg-Landau equation, Structure and Dynamics of Nonlinear Waves in Fluids, A. Mielke and K. Kirchg~issner, eds, World Scientific, Singapore (1995), 230-238. [58] T. Gallay and A. Mielke, Diffusive mixing of stable states in the Ginzburg-Landau equation, Comm. Math. Phys. 199 (1998), 71-97. [59] T. Gallay and S. Slijep6evi6, Energy flow in extended gradient partial differential equations, Univ. de Paris-Sud, Preprint 99-83 (1999). [60] J.-M. Ghidaglia and B. H6ron, Dimension of the attractor associated to the Ginzburg-Landau partial differential equation, Phys. D 28 (1987), 282-304. [61] J. Ginibre and G. Velo, The Cauchy problem in local spaces for the complex Ginzburg-Landau equation I. Compactness methods, Phys. D 85 (1996), 191-228; and II. Contraction methods, Comm. Math. Phys. 187 (1997), 45-79. [62] V.L. Ginzburg and L.D. Landau, On the theory ofsuperconductivi~', Paper No. 73, in Collected Papers of Landau, Pergamon Press (1965). [63] P. Hagan, Spiral waves in reaction diffusion equations, SIAM J. Appl. Math. 42 (1982), 762-786. [64] J.K. Hale, Asymptotic Behavior of Dissipative Systems, Mathematical Surveys and Monographs, Vol. 25, Amer. Math. Soc., Providence, RI (1988). [65] J.K. Hale and G. Raugel, Limits of semigroups depending on parameters, Resenhas (Univ. Sho Paulo) 1 (1993), 1-45; Addendum in 1 (1994), 361. [66] F. Hamel and N. Nadirashvili, Travelling fronts and entire solutions of the Fisher-KPP equation on ~N, Arch. Rat. Mech. Anal. (2000) (to appear). [67] M. Haragus-Courcelle and G. Schneider, Bifurcating fronts for the Taylor-Couette problem in infinite cylinders, Zeits. Angew. Math. Physik (ZAMP) 50 (1999), 120-151. [68] H. Hasimoto and H. Ono, Nonlinear modulation of gravitational waves, J. Phys. Soc. Japan 33 (1972), 805-811. [69] L.M. Hocking and K. Stewartson, On the nonlinear response of a marginally unstable plane parallel flow to a two-dimensional disturbance, Proc. Roy. Soc. London A 326 (1972), 289-313. [70] P. Holmes, Spatial structure of time periodic solutions of the Ginzburg-Landau equation, Phys. D 23 (1986), 84-90.
832
A. Mielke
[71] G. Iooss and M. Adelmeyer, Topics in Bifurcation Theory and Applications, World Scientific, Singapore (1992). [72] G. Iooss and A. Mielke, Bifurcating time periodic solutions of Navier-Stokes equations in infinite cylinders, J. Nonlinear Sci. 1 (1991), 106-146. [73] G. Iooss and A. Mielke, Time-periodic Ginzburg-Landau equations for one-dimensional patterns with large wave length, Zeits. Angew. Math. Physik (ZAMP) 43 (1992), 125-138. [74] G. Iooss, A. Mielke and Y. Demay, Theory of the steady Ginzburg-Landau equation in hydrodynamic stability problems, Europ. J. Mech. B/Fluids 8 (1989), 229-268. [75] R.L. Jerrard, Vortex dynamics for the Ginzburg-Landau wave equation, Calc. Var. Partial Differential Equations 9 (1999), 1-30. [76] R.L. Jerrard and H.M. Soner, Dynamics of Ginzburg-Landau vortices, Arch. Rat. Mech. Anal. 142 (1998), 99-126. [77] L.A. Kalyakin, Long wave asymptotics, integrable equations as asymptotic limits of non-linear systems, Russian Math. Surveys 44 (1989), 3-42. [78] T. Kapitula, On the nonlinear stability of plane waves for the Ginzburg-Landau equation, Comm. Pure Appl. Math. 47 (1994), 831-841. [79] T. Kapitula, Existence and stability of singular heteroclinic orbits for the Ginzburg-Landau equation, Nonlinearity 9 (1996), 669-685. [80] T. Kapitula, Bifurcating bright and dark solitary waves for the perturbed cubic-quintic nonlinear SchrOdinger equation, Proc. Roy. Soc. Edinburgh Ser. A 128 (1998), 585-629. [81] T. Kapitula and S. Maier-Paape, Spatial dynamics of time periodic solutions for the Ginzburg-Landau equation, Zeits. Angew. Math. Physik (ZAMP) 47 (1996), 265-305. [82] T. Kapitula and B. Sandstede, Stability of bright and dark solitary-wave solutions to perturbed nonlinear SchrOdinger equations, Phys. D 124 (1998), 58-103. [83] K. Kirchg~issner, Berechnung der VerzweigungslOsungen eines hydrodynamischen Randwertproblems, Zeits. Angew. Math. Mech. (ZAMM) 43 (1966), T61-63. [84] K. Kirchg~issner, Wave solutions of reversible systems and applications, J. Differential Equations 45 (1982), 113-127. [85] K. Kirchg~issner, Waves in weakly-coupled parabolic systems, Nonlinear Analysis and Optimization, C. Vinti, ed., Lecture Notes in Math., Vol. 1107, Springer, Berlin (1984), 154-180. [86] K. Kirchg~issner and P. Sorger, Stability analysis of branching solutions of the Navier-Stokes equations, Proceedings of the 12th Congress of Appl. Mechanics (Stanford 1968), M. H6tenyi and G. Vincenti, eds, Springer, Berlin (1969), 257-268. [87] P. Kirrmann, G. Schneider and A. Mielke, The validity of modulation equations for extended systems with cubic nonlinearities, Proc. Roy. Soc. Edinburgh Ser. A 122 (1992), 85-91. [88] C.D. Levermore and M. Oliver, The complex Ginzburg-Landau equation as a model problem, Dynamical Systems and Probabilistic Methods in Partial Differential Equations, P. Deift, C.D. Levermore and C.E. Wayne, eds, Lect. Appl. Math., Vol. 31, Amer. Math. Soc., Providence, RI (1996), 141-190. [89] C.D. Levermore and M. Oliver, Distribution-valued initial data for the complex Ginzburg-Landau equation, Comm. Partial Differential Equations 22 (1997), 39-48. [90] F.-H. Lin and J.X. Xin, On the incompressible fluid limit and the vortex motion law of the nonlinear Schr6dinger equation, Comm. Math. Phys. 200 (1999), 249-274. [91] B.P. Luce and C.R. Doering, Scaling of turbulent spike amplitudes in the complex Ginzburg-Landau equation, Phys. Lett. A 178 (1993), 92-98. [92] P. Manneville, Dissipative Structures and Weak Turbulence, Academic Press, New York (1990). [93] B.J. Matkovsky and V. Volpert, Coupled nonlocal complex Ginzburg-Landau equations in gasless combustion, Phys. D 54 (1992), 203-219. [94] I. Melbourne, Derivation of the time-dependent Ginzburg-Landau equation on the line, J. Nonlinear Sci. 8 (1998), 1-15. [95] A. Mielke, Reduction of quasilinear elliptic equations in cylindrical domains with applications, Math. Meth. Appl. Sci. 10 (1988), 51-66. [96] A. Mielke, Reduction of PDEs on domains with several unbounded directions: a first step towards modulation equations, Zeits. Angew. Math. Phys. (ZAMP) 43 (1992), 449-470.
The Ginzburg-Landau equation in its role as a modulation equation
833
[97] A. Mielke, A new approach to sideband-instabilities using the principle of reduced instability, Nonlinear Dynamics and Pattern Formation in Natural Environment, A. Doelman and A. van Harten, eds, Pitman Res. Notes, Vol. 335, Longman, Harlow (1995), 206-222. [98] A. Mielke, The complex Ginzburg-Landau equation on large and unbounded domains: sharper bounds and attractors, Nonlinearity 10 (1997), 199-222. [99] A. Mielke, Mathematical analysis of sideband instabilities with application to Rayleigh-B~nard convection, J. Nonlinear Sci. 7 (1997), 57-99. [100] A. Mielke, Instability and stability of rolls in the Swift-Hohenberg equation, Comm. Math. Phys. 189 (1997), 829-853. [ 101] A. Mielke, Bounds for the solutions of the complex Ginzburg-Landau equation in terms of the dispersion parameters, Phys. D 117 (1998), 106-116. [102] A. Mielke, Exponentially weighted L~C-estimates and attractors for parabolic systems on unbounded domains, Proceedings of the EQUADIFF 1999, Berlin, August 1999, B. Fiedler, K. Gr6ger, J. Sprekels, eds, World Scientific, Singapore (2000), 641-646. [103] A. Mielke, P. Holmes and J.N. Kutz, Global existence for an optical fiber laser model, Nonlinearity 11 (1998), 1489-1504. [ 104] A. Mielke, K. Kirchg~issner (eds), Structure and Dynamics of Nonlinear Waves in Fluids, World Scientific, Singapore (1995). [105] A. Mielke and G. Schneider, Attractors for modulation equations on unbounded domains -existence and comparison, Nonlinearity 8 (1995), 743-768. [ 106] A. Mielke and G. Schneider, Derivation and justification of the complex Ginzburg-Landau equation as a modulation equation, Dynamical Systems and Probabilistic Methods in Partial Differential Equations, E Deift, C.D.Levermore and C.E. Wayne, eds, Lect. Appl. Math., Vol. 31, Amer. Math. Soc., Providence, RI (1996), 191-216. [107] A. Mielke, G. Schneider and H. Uecker, Stability and diffusive dynamics on extended domains, Ergodic Theory, Analysis and Efficient Simulation of Dynamical Systems, B. Fiedler, ed., Springer, Berlin (2001) (in press). [108] A. Mielke, G. Schneider and A. Ziegra, Comparison of inertial manifolds and application to modulated systems, Math. Nachrichten 214 (2000), 53-69. [109] A.C. Newell, Envelope equations, Nonlinear Wave Motion, Lectures in Appl. Math., Vol. 15, Amer. Math. Soc., Providence, RI (1974), 157-163. [110] A.C. Newell, T. Passot and J. Lega, Order parameter equations for patterns, Ann. Rev. Fluid Mech. 25 (1993), 399-453. [111] A. Newell and J. Whitehead, Finite bandwidth, finite amplitude convection, J. Fluid Mech. 38 (1969), 279-303. [ 112] A. Newell and J. Whitehead, Review of the finite bandwidth concept, Proceedings of the IUTAM Symposium 1969 in Instability of Continuous Systems, H. Leipholz, ed., Springer, Berlin (1971), 284-289. [113] Y.N. Ovchinnikov and I.M. Sigal, The Ginzburg-Landau equation III. Vortex dynamics, Nonlinearity 11 (1998), 1277-1294. [114] D. Peterhof and G. Schneider, A global existence result for a spatially extended 3D Navier-Stokes problem with non-small initial data, Nonlinear Differential Equations Appl. (NoDEA) 7 (2000), 415--434. [115] G. Raugel, Global attractors in partial differential equations, Handbook in Dynamical Systems, Vol. 2, B. Fiedler, ed., Elsevier, Amsterdam (2002), 885-982. [ 116] B. Sandstede, A. Scheel and C. Wulff, Bifurcations and dynamics of spiral waves, J. Nonlinear Sci. (1999) (to appear). [117] B. Scarpellini, Stabilio; Instabili~, and Direct Integrals, Pitman Res. Notes in Math., Vol. 402, Chapman and HaI1/CRC (1999). [118] A. Shepeleva, On the validi~ of the degenerate Ginzburg-Landau equation, Math. Meth. Appl. Sci. 20 (1997), 1239-1256. [119] A. Shepeleva, Modulated modulation approach to the loss of stabili~ of periodic solutions for the degenerate Ginzburg-Landau equation, Nonlinearity 11 (1998), 409-429. [120] A. Scheel, Subcritical bifurcation to infinitely many rotating waves, J. Math. Anal. Appl. (1998) (to appear).
834
A. Mielke
[121] A. Scheel, Bifurcation to spiral waves in reaction-diffusion systems, SIAM J. Math. Anal. (1999) (to appear). [ 122] G. Schneider, A new estimate for the Ginzburg-Landau approximation on the real axis, J. Nonlinear Sci. 4 (1994), 23-34. [123] G. Schneider, Error estimates for the Ginzburg-Landau approximation, Zeits. Angew. Math. Phys. (ZAMP) 45 (1994), 433-457. [ 124] G. Schneider, Global existence via Ginzburg-Landau formalism and pseudo-orbits of Ginzburg-Landau approximations, Comm. Math. Phys. 164 (1994), 157-179. [ 125] G. Schneider, Analyticity of Ginzburg-Landau modes, J. Differential Equations 121 (1995), 233-257. [126] G. Schneider, Validity and limitation of the Newell-Whitehead equation, Math. Nachrichten 176 (1995), 249-263. [ 127] G. Schneider, Justification of modulation equations in domains with n >~2 unbounded space directions, Structure and Dynamics of Nonlinear Waves in Fluids, A. Mielke and K. Kirchg~issner, eds, World Scientific, Singapore (1995), 383-391. [128] G. Schneider, The validity of generalized Ginzburg-Landau equations, Math. Methods Appl. Sci. 19 (1996), 717-736. [ 129] G. Schneider, Justification of mean-field coupled modulation equations, Proc. Roy. Soc. Edinburgh Ser. A 127 (1997), 639-650. [ 130] G. Schneider, Approximation of the Korteweg-de Vries equation by the nonlinear Schriidinger equation, J. Differential Equations 147 (1998), 333-354. [ 131 ] G. Schneider, Hopf-bifurcation in spatially extended reaction-diffusion systems, J. Nonlinear Sci. 8 (1998), 17-41. [132] G. Schneider, Justification of modulation equations for hyperbolic systems via normal forms, Nonlinear Differential Equations Appl. (NoDEA)5 (1998), 69-82. [133] G. Schneider, Nonlinear stability of Taylor vortices in infinite cylinders, Arch. Rational Mech. Anal. 144 (1998), 121-200. [134] G. Schneider, Cahn-Hilliard description of secondary flows of a viscous incompressible fluid in an unbounded domain, Zeits. Angew. Math. Mech. (ZAMM) 79 (1999), 615-626. [135] G. Schneider, Global existence results for pattern forming processes in infinite cylindrical domainsApplications to 3D Navier-Stokes problems, J. Math. Pures Appl. 78 (1999), 265-312. [136] G. Schneider, Some characterizations of the Taylor-Couette attractor, Integral Differential Equations 12 (1999), 913-926. [137] L.A. Segel, Distant sidewalls cause slow amplitude modulation of cellular convection, J. Fluid Mech. 38 (1969), 203-224. [ 138] S. Slijeprevid, Extended gradient systems: dimension one, Preprint, Warwick (August 1999). [ 139] K. Stewartson and J.T. Stuart, A nonlinear instability theory for a wave system in a plane Poiseuille flow, J. Fluid Mech. 48 (1971), 529-545. [140] J.T. Stuart and R.C. DiPrima, The Eckhaus and the Benjamin-Feir resonance mechanisms, Proc. Roy. Soc. London Ser. A 363 (1978), 27-41. [ 141 ] R. Temam, Infinite-Dimensional Systems in Mechanics and Physics, Springer, Berlin (1988). [142] A. van Harten, On the validity of Ginzburg-Landau's equation, J. Nonlinear Sci. 1 (1991), 397-422. [143] A. van Harten, Modulated modulation equations, Structure and Dynamics of Nonlinear Waves in Fluids, A. Mielke and K. Kirchg~issner, eds, World Scientific, Singapore (1995), 117-130. [144] W. van Saarloos and P.C. Hohenberg, Fronts, pulses, sources and sinks in generalised complex GinzburgLandau equations, Phys. D 56 (1992), 303-367. [145] M.I. Weinstein and J. Xin, Dynamic stability of vortex solutions of Ginzburg-Landau and nonlinear Schrrdinger equations, Comm. Math. Phys. 180 (1996), 389-428. [146] R.E. Wilson, Numerically derived scalings for the complex Ginzburg-Landau equation, Phys. D 112 (1998), 329-343. [147] R.E. Wilson, Personal communication, Bath (April 1999). [148] V.E. Zakharov and E.A. Kuznetsov, Multi-scale expansions in the theory of systems integrable by the inverse scattering transform, Phys. D 18 (1986), 455-463. [149] S.V. Zelik, The attractor for nonlinear reaction-diffusion systems in the unbounded domain and Kolmogorov's e-entropy, Preprint, Institute for Problems of Transmission Information, Moscow (July 1999).
CHAPTER
16
Parabolic Equations: Asymptotic Behavior and Dynamics on Invariant Manifolds R Polfi~ik* Institute of Applied Mathematics, Comenius UniversiO', Mlynskd dolina, 842 48 Bratislava, Slovakia
Contents 1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2. State space, smoothness and compactness . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3. The comparison principle and monotone dynamical systems . . . . . . . . . . . . . . . . . . . . . . . . 4. One space dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5. Symmetric domains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6. Gradient-like systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7. Dynamics on invariant manifolds and realization of ODEs . . . . . . . . . . . . . . . . . . . . . . . . . Acknowledgment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
*Supported in part by V E G A grant 1/1492/94. H A N D B O O K OF D Y N A M I C A L SYSTEMS, VOL. 2 Edited by B. Fiedler 9 2002 Elsevier Science B.V. All rights reserved 835
837 839 843 852 859 864 867 876 876
This Page Intentionally Left Blank
Parabolic equations
837
1. Introduction
This survey is devoted primarily to second order parabolic equations of the form ut = L u + Bu
f(t,x,u,
Vu),
= 0,
xEY2, t > 0 ,
(1.1)
x E 0s
(1.2)
t > 0.
Here Y2 is a domain in ]l~N, N >~ 1, L is a second order elliptic operator, f is a real-valued function, and B is a boundary operator of the form OU
B u - - ~ ( x ) - x - - + V(x)u,
OV
(1.3)
v being the unit outward normal vector field on 0Y2. Boundary conditions of Dirichlet (/3 = 0 with g :/= 0 everywhere), Neumann (g = 0 with fl --/- 0 everywhere) and Robin (/3 --/: 0 everywhere) type are considered. We impose appropriate regularity hypotheses on the above functions and domain and always assume that f is periodic in t (this in particular includes autonomous equations). We study qualitative properties of solutions that are global and stay bounded in a suitable norm. For the sake of simplicity of exposition we do not attempt to present the results in the forthcoming sections in their most general form. This is the main reason why our discussion usually refers to the above scalar semilinear equations on bounded domains. Often extensions to a broader class are possible and will occasionally be mentioned. In particular, quasilinear or fully nonlinear equations, nonlinear boundary conditions, unbounded domains and special systems of equations will be commented upon. Boundary-value problems of the form (1.1) and (1.2) are frequently met in research publications. On the applied side, interest in these equations stems from their relevancy in modeling reaction and diffusion phenomena in, among others, population dynamics and genetics, heat conduction, chemical reactions and combustion theory, cf. [72,146,150,12, 30,18]. For example, as a population dynamics model, (1.1) can be interpreted as follows. Assume a population of organisms inhabits a region s Denote by u -- u (x, t), x E s the density of this population at time t. The growth rate of u, u t, depends on several factors. Firstly, it is the birth and mortality rate of the population, that is typically a nonlinear function of u. In heterogeneous environment, this function can also depend on x, and if the environment changes with time, due to seasonal variations, for example, it is also natural to assume that the nonlinearity depends on t periodically. Secondly, the random dispersal (migration) of the population contributes the term L u = Au in the equation. This is obtained via application of Fick's law, or alternatively, using the equations for the Brownian motion. More general second order elliptic operators may be more appropriate here, see [150]. Finally, other forms of dispersal of organisms may be present which are not random, hence not taken account for by the Laplacian. One can think of advection due to physical forces, such as currents in the environment, or the ability of the organisms to sense the environment and thus find a preferred direction of movement. In both cases, an additional term of the form b ( x , t) 9V u should be included in the equation.
838
P. Pold(ik
Combining the above, one arrives at an equation of the form (1.1). Condition (1.2) characterizes the boundary of the environment. For example, the boundary can be lethal to the individuals, thus Dirichlet condition is assumed on ~ S-2, or the environment is isolated from its surroundings in which case Neumann (nonflux) condition is imposed. Equations (1.1) are also attractive for purely theoretical reasons. They are relatively simple and often tractable with several analytical tools (maximum principle, Lyapunov functions, invariant manifolds), yet their solutions exhibit a vast variety of interesting phenomena. The qualitative theory of parabolic equations underwent a rapid development in the last two decades and became wide in scope. Obviously, only some topics can be included in this survey. We have made the selection focusing almost exclusively on asymptotic behavior of bounded global solutions. Our aim is to provide the reader with a picture of the present understanding of the large time behavior of such solutions under various structural assumptions. More specifically, the following material is reviewed. We start with the most general case, assuming only minor regularity on the data in (1.1) and (1.2). Invoking the maximum principle, we put the equations in the context of monotone dynamical systems. Several theorems are then available describing the behavior of typical trajectories, that is, trajectories whose orbits fill an open and dense set in the state space. In particular, we note that bounded solutions of autonomous equations typically converge to an equilibrium, whereas solutions of time-periodic equations approach periodic trajectories of possibly high minimal period. In this context, the existence of asymptotically stable subharmonic solutions is a relevant problem and will be discussed. These results are presented in Section 3. In Section 4, problems on one-dimensional domains are considered. The behavior of all bounded trajectories is described for boundary conditions of type (1.2), as well as for periodic boundary conditions. We devote some space to the study of linear variational equations and their so-called Floquet bundles. These play an important role in the study of perturbations (regular or singular) of one-dimensional problems. All these results depend in a crucial way on properties of the zero number functional that are also recalled in the section. In their simplest form, the zero number properties follow from the maximum principle combined with the Jordan curve theorem in the (x, t) plane. This is of course lost when we pass to higher-dimensional domains, and with it is lost a chance for a universal description of the asymptotics of all bounded trajectories. Indeed, as we show in the last section, there are essentially no restrictions on possible behavior of general solutions. This may not apply, however, if an additional structure is imposed on (1.1). Some specific examples are discussed in Sections 5 and 6. In Section 5, we consider equations on a ball. Assuming spatially homogeneous nonlinearity, the equation becomes equivariant under the natural action of the group of rotations. For Dirichlet boundary condition, a complete space-time asymptotics of positive solutions is found. First, employing the moving hyperplane method, their asymptotic spatial symmetrization is shown. This implies that the large time behavior of positive solutions is "controlled" by a problem with a 1D spatial variable (and its zero number functional). This eventually leads to the asymptotic periodicity of positive solutions. Gradient-like equations, that is, equations admitting a Lyapunov functional are discussed in Section 6. By LaSalle's invariance principle, any bounded solution of such an equation
Parabolic equations
839
approaches a connected set of equilibria. We present two theorems giving sufficient conditions for the solution to actually converge to a single equilibrium. The first one requires the (local) normal hyperbolicity of a set of equilibria- potential elements of the co-limit set. The other one applies to analytic equations with the gradient (not merely gradient-like) structure. We list several application of these theorems. Note that even for the semilinear heat equation ut = A u + f ( x , u ) ,
u = 0,
xES2, t>0,
(1.4)
x E OS2, t > 0,
(1.5)
with S2 being a two-dimensional disk, bounded solutions are not necessarily convergent. We give a more precise statement about this in Section 6. The entire Section 6 is devoted to the discussion of possible dynamics of semilinear parabolic equations. The problems of existence of chaotic dynamics and of trajectories having high-dimensional limit sets is addressed. Also the effect of the dimension of the spatial domain Y2 on the dynamics is examined. There is a method with rather general applicability that has been designed to deal with similar problems. It is based on realization of vector fields on invariant manifolds and works roughly as follows. One considers vector fields generated by equations in question on invariant finite dimensional manifolds. Varying data in the investigated PDE, one tries to discover if there are any restrictions on the class of vector fields one can obtain this way. With no, or not too significant restrictions, one accounts for an "arbitrary" dynamics. We indicate basic ingredients of the method and survey recent results. Preliminary material is collected in Section 2. Here the dynamical systems generated by Equations (1.1) and ( 1.2) are introduced and their compactness and smoothness properties are discussed. We would like to bring the readers attention to Hale's survey [87] that is also devoted to scalar parabolic equations. The focus of that paper is different from ours and it is a good source of additional results and references.
2. State space, smoothness and compactness In this section we introduce dynamical systems defined by problem (1. l) and (1.2). Let s be a bounded domain in ]~U with boundary 012 of class C 2+~ for some 0 > 0. Let L be a second order differential operator N Lu -- ~
i.j=l
(2.1)
aijUxixj,
aij satisfy the following requirements. (H 1) (Regularity) aij are H61der continuous on I2.
where
(H2) (Ellipticity) Zi,j=l U ai.j(x)~i~j positive constant c t.
~ Cl 1~]2 (x E ~"2, ~ -- (~1 . . . . . ~N) E R N) for some
840
P. Pol6eik
Functions a, b defining the boundary operator B, see (1.3) are assumed to satisfy (H3) /3, y are of class C 1 on Os and either/~ _= 0 with y :/: 0 everywhere or/3 -r 0 everywhere. Our assumptions on the nonlinearity f : (t, x, u, ~) w-~ f (t, x, u, ~) are as follows. (N 1) For some integer m ~> 0, f is continuous on It~ x a"2 x IR x ]t~ u together with all its partial derivatives with respect to (u, ~) up to order m. (N2) f is locally H61der continuous in t and (if m - - 0 ) locally Lipschitz continuous in (u, ~). More specifically, there is a 0 > 0 such that for any bounded set B C I~ X ~ X ~ X I~ x one has
< c(I,-il
~
with some constant c -- c ( B ) > O. (N3) For some r > 0, f is r-periodic in t. Under these assumptions, one can study (1.1) and (1.2) in the context of analytic semigroups and abstract parabolic equations. A standard approach to the existence and regularity of solutions, as found in [6,52,76,94,122,153] and other texts, is outlined by the following scheme. One chooses a basic space X, on which L (under a given boundary condition) defines a sectorial operator, that is, it generates an analytic semigroup. Then, one considers an appropriate scale of Banach spaces X ~, 0 < ot < 1, between the domain of L, X l , and the basic space X. Among these, one chooses a space X ~ such that the Nemitskii operator defined on X ~ by the nonlinearity f is locally Lipschitz continuous. Complementing (1.1) and (1.2) with an initial condition u(., 0) - - u 0 with u0 e X ~, one obtains a well posed problem. For a comprehensive discussion of the spaces on which elliptic operators generate analytic semigroups see [ 122]. One also has several possibilities for the constructions of the intermediate spaces X ~. Typically, fractional power spaces [76,94,122,153], or spaces obtained by an interpolation method [6,52,122] are used. To make a specific choice, we set X = L P (~C2)
with N < p < cx~. Let A be the X-realization of L under boundary condition (1.2); that is, A is the operator u ~-, Lu with domain D(A)-
X l -- {u ~ W2'p(s2) 9u satisfies (1.2)}.
Then A is the generator of an analytic semigroup on X. Let X ~, 0 ~< c~ < l, be the fractional power spaces associated with A. We choose (p 4- N ) / 2 p < ot < 1; the space X ~ is then continuously imbedded in C1 (~-). Thus the Nemitskii operator / /(t, u)(x)-
f(t,x,
u ( x ) , Vu(x))
(u E X ~)
is well defined on R x X ~ with values in X, it is locally H61der continuous in t, locally Lipschitz in u and of class C m in u.
Parabolic equations
841
Write (1.1) and (1.2) in the abstract form:
u, = Au + f (t, u).
(2.2)
For the following existence and regularity results we refer the reader to [94,122]. Given u0 ~ X ~ there is a unique solution u(., t, u0) of (2.2) satisfying the initial condition u(., t) = u0(.). This solution is defined on a maximal interval [0, T), T = T (u0) ~< ec and if T < ec then Ilu(-, t, u0)llx- is unbounded. The function t ~ u(., t, u0) is contained in
c([o, T), x
n C ((0,
X
n C((O,
X').
For any fixed t > 0, the time-t map u0 ~ u(., t, u0) is defined on an open set in X ~ and, when viewed as an X~-valued function, it is of class C m (see [94, Section 3.6]) and compact (see [97, Section III.21 ]). Under the additional assumption that f is H61der continuous in x it follows that u(., t, u0) is a classical solution of (1.1) and (1.2) (cf. [94, Section 3.6], [ 122, Section 7.3]). If Equation (2.2) is autonomous and all solutions are global (that is, their maximal interval of existence is [0, ec)) then the map (uo, t ) ~ S(t)uo = u ( . , t , uo) defines a continuous-time dynamical system (semiflow) on X ~ . This is to say that the map is continuous, S(0) is the identity on X ~ and the semigroup condition S(t + s) = S ( t ) S ( s ) (t, s >~O) holds. If (2.2) is time periodic and the solutions are global, the period map S ( r ) generates a discrete-time dynamical system on X ~ . In this case, S ( n r ) = S ( r ) " (n -- 0, 1 . . . . ). The following standard notation and terminology is used throughout the paper. Let S be a semiflow on a Banach space Y. The trajectory of a point x E Y is the set {(t, S(t)x): t >~ 0}; its orbit is the set O ( x ) = {S(t)x: t >~ 0}. The w-limit set of x is defined by
N
s~>0
so og(x) consists of the limit points y = limS(t,,)x where t,, ~
O(G) = U
cx~. For G C Y, we denote
O(x).
xEG
If S(t)z = z (t >~ 0), z is called an equilibrium. We say of a point x (or of its trajectory or orbit) that it is convergent if S ( t ) x converges as t ~ cx~ to a point z, necessarily an equilibrium. A semiflow is compact if S(t) is compact for each t > 0. For discrete-time dynamical systems, the above notions are defined in an analogous way (S(t) is replaced by S t where S is a map and t a positive integer). We next state explicit conditions that guarantee that all solutions of (1.1) and (1.2) are global and thus the problem generates a semiflow or a discrete-time dynamical system
P. Pol6(ik
842
on X '~. Although these are not the most general assumptions, they are suitable for our purposes. (G 1) There exist an e > 0 and a continuous function c" IR+ --+ IR+ such that
[f(t,x,u,~)[ ~ c(p)(1
+
I~12-~)
(p > 0, (t, x, u, ~) ~ [0, r] x s x [ - p , p] x ]I~N). (G2) There is atc > 0 such that
u f ( t , x, u, O) 0. The last condition refers to the functions defining the boundary operator. Note that we only need to assume that y does not change sign on 0s (iii) is achieved by multiplying (1.2) by - 1 if necessary. One shows that any solution u of (1.1) and (1.2) is global in two steps. First, one uses (G2) and (G3) to find an L ~ bound on u. In fact, if k ~> x is any constant such that the estimate
k lu(x,t)l holds for t = 0 then the same estimate hold for any positive t as long as the solution exists. This follows from the fact that k is a supersolution and - k is a subsolution of (1.1) and (1.2) (see [97, Section III.21] for details). Once an L ~ bound is established, the growth condition (G1) implies that u(., t) is also bounded in X ~ (cf. [4], [122, Section 7.3.2]) which implies that it is global. An even stronger conclusion can be drawn from (G 1)-(G3). Set
D-
{~ ~ x ~. - ~ ~< ~(x) ~< ~ (x ~ s2)}.
Then the following statements hold true: 9 for any u0 ~ X ~ there is a 0 -- O(uo) such that for any t > 0 one has u(., t, u0) 6 D, 9 D is positively invariant: u0 ~ D implies u(., t, u0) E D (t ~> 0), 9 S(t)D is relatively compact in X ~ for any t > 0. This strong compactness property implies that (1.1), (1.2) has a compact global attractor (see [86], for example). The first two properties follow by comparison arguments as above, the last property is a consequence of (G1) and the compactness of S(t) (see [97, Section III.21 ]). Another condition under which all solutions are global is that of f being (globally) Lipschitz. In this case S(t) is also defined everywhere and compact for t > 0. This remark is useful when individual bounded solutions or a set of solutions Contained in a bounded set in X ~ are considered. For such solutions all vectors (u(x, t), Vu(x, t)) are contained in a bounded set B0 in R x ]~U and the values of f at the points out of IR x ~- x B0 are irrelevant. We can modify f , without effecting the solutions in question and the standing
Parabolic equations
843
hypotheses, so that f becomes globally Lipschitz. This allows us to assume, without loss of generality, that (1.1) and (1.2) generates a compact dynamical system on X ~ . Existence and regularity theorems similar to those mentioned above are also available, under appropriately modified assumptions, if Y2 is not bounded (cf. [52,94,122]). However, the time-t map is no longer compact in general.
3. The comparison principle and monotone dynamical systems The maximum principle has long been used for various purposes in the study of parabolic equations. For nonlinear equations one usually needs it in the form of a comparison principle which we now state for (1.1) and (1.2). We use the notation from Section 2 and assume (H1)-(H3) and (N 1) and (N2) of that section to be satisfied. COMPARISON PRINCIPLE. Let uo,-~o E X ~ satisfy uo(x) 0), (cii) f o r any x E 0 s t > 0 one has either u ( x , t, uo) < u ( x , t,-ao)
or else u(x, t, uo) - u(x, t,-uo)
and
Ou Ou -Ov - ( x , t, uo) > ~ (x ' 't -uo) "
See [75,170,189]. Note that a slight modification of the standard proofs is needed to deal with solutions that may not be classical (see [52]). Thus the dynamical system of (1.1) and (1.2) preserves the pointwise ordering the of the state space X ~ . In this section, we study consequences of this property. One can find several other classed of differential equations (ODEs, FDEs and some parabolic systems) whose semiflows respect an order structure. This naturally calls for an abstraction covering all these equations. In a series of papers from early 80s, Hirsch introduced the notion of monotone dynamical systems and initiated their systematic study (see [100-102] and references therein). Independently, Matano considered a similar class of semiflows that he called order preserving (see [ 132-134]). Triggered by their work, many other researchers contributed to the theory. For a comprehensive treatise of continuoustime systems the reader can consult the monograph of Smith [186]. The monograph of Hess [97] contains several early results dealing with discrete-time systems with special attention to time-periodic parabolic problems. In accordance with the general focus of this survey, we confine our account to results on asymptotic behavior of solutions. In particular, we discuss a very successful area of the theory of monotone dynamical systems - a description of the behavior of "most" bounded
P. Pold(ik
844
trajectories. We present relevant results for both discrete and continuous time systems. Abstract results are given without proofs, sometimes short sketches are included to help the reader's intuition. Applications to (1.1) and (1.2) are given with more details. We first introduce basic notation and definitions. In the whole section Y is an ordered Banach space with norm I1" II and order cone Y+. Recall that an order cone is a closed convex cone such that Y+ M ( - Y + ) = {0}. We assume that Y is strongly ordered which means that int Y+, the interior of Y+, is nonempty. For x, y E Y we write
x~0}
is bounded in X ~
(in particular, f o r any uo ~ D the solution u(., t, u0) is global). Then there is an open and dense subset G o f D such that f o r any uo ~ G the solution u (., t, uo) is quasiconvergent. If hypotheses (G1)-(G3)are satisfied then (B) can be omitted (and one can take D ---- X~).
PROOF. As remarked at the end of Section 2, modifying f outside O(D), we may assume that (1.1) and (1.2) generates a compact strongly monotone semiflow on X ~. The first conclusion then follows directly from Theorem 3.1. If (G1)-(G3) are satisfied then all solutions are global (in this case no modification of f is needed) and O ( S ( 1 ) ( D ) ) is bounded in X ~ for any bounded set D. We thus obtain the conclusion for any D bounded and consequently for D -- X ~ . D We list three fundamental properties of strongly monotone compact semiflows that lead to the conclusion of Theorem 3.1. We assume here that x, y are points in Y with relatively compact trajectories. CONVERGENCE CRITERION. If the orbit O ( x ) contains two distinct related points then co(x) is a singleton; that is, x is convergent. NONORDEREDNESS PRINCIPLE. co(x) does not contain any two distinct related points.
LIMIT SET DICHOTOMY. If y > x then either co(y) >> co(x) or else co(y) = co(x) and this joint limit set consists of equilibria (that is, x, y are quasiconvergent). While the proof of the first two properties is an easy exercise, the limit set dichotomy is nontrivial (see [ 102] for the original proof and [ 186] for an improved version). To give the reader some intuition about Theorem 3.1, we sketch the proof of the density of the set of
P Pold(ik
846
quasiconvergent points. Denote this set by Q. We fix any x 6 D \ Q and show that it can be approximated by a quasiconvergent (even convergent) point y. By the limit set dichotomy, for any y E D with y > x one has co(y) >> co(x). Moreover, using compactness arguments and nonorderedness of co (x), one can show that the Hausdorff distance between these limit sets is bounded below by a positive number e0 independent of y > x. Now, if y > x is close to x then, by continuity, its trajectory stays near the trajectory of x for a long time. In particular, S(t)y gets close to co(x) for some t = to. Of course, S(t)y has to eventually get close to its limit set co(y) which is above co(x)" co(y) >> co(x), and of distance at least e0 from co(x). It follows that the orbit of y contains two points S(to)y and S(tl)y, near co(x) and co(y), respectively, such that S(to)y x that is sufficiently close to x, one uses analogous arguments for y < x (referring to the monotone approximation property of D). This shows the density of Q. We remark that no result analogous to Theorem 3.1 is available for compact strongly monotone discrete-time dynamical systems if they are merely continuous (or even Lipschitz). Whether any characterization of typical dynamics is possible in this case or not is still an open problem. It is a natural question to ask, under what conditions can quasiconvergence in Theorem 3.1 be replaced by convergence (it is a folklore knowledge that one does need additional assumptions although this has not been documented by explicit examples). Here are two easy sufficient conditions involving the set of all equilibria (further this set is denoted E). If E is either totally disconnected (that is, all its connected components are singletons) or totally ordered (that is, any two equilibria are related) then quasiconvergence is the same as convergence. This follows from the connectedness of the limit sets in the former case and by the nonorderedness principle in the latter. It is more interesting that typical convergence occurs, without any a priori assumptions on the set of equilibria, if the semiflow is of class C l . We now present results of this type for differentiable monotone dynamical systems. We start from maps and then obtain the corresponding theorem for semiflows as a corollary, although, historically speaking, this is not the chronological order (see the bibliographical notes below). Consider a compact C l map F" Y ~ Y. We denote by Fix(F) the set of all fixed points of F. For a z 6 Fix(F) let Q(z) denote the spectral radius of F'(z). We say that z is
linearly stable linearly unstable neutrally stable
if Q(z) < 1, if Q(z) > 1, if Q(z) - 1.
By standard stability results, a linearly stable fixed point z is stable in the nonlinear sense: given any neighborhood U of z there is another neighborhood V such that F n (V) C U, n = 1,2 . . . . . Also z attracts all orbits starting in a neighborhood of itself. On the other hand, for z to be stable it is necessary that it be at least neutrally stable (that is, neutrally stable or linearly stable). A point z 6 Y is periodic (relative to F) of period p if F p (z) -- z. A periodic point is said to be linearly stable (and similarly for instability and neutral stability) if it is such for the map FP.
847
Parabolic equations
THEOREM 3.3. Let F : Y ~ Y be a compact C 1 map such that F ' ( x ) is strongly positive f o r any x E Y. Let D C Y be an open subset such that O ( D ) = U,=0.1 .... F " ( D ) is bounded. Then the following two assertions hold: (i) There is an open and dense subset G C D such f o r any x E G there is a periodic point z that is at least neutrally stable and such that co(x) = O(z). (ii) There is a Po -- po(D) such that if z E clO(D) is a periodic point that is at least neutrally stable then its minimal period is bounded above by Po. The first result, assertion (i), is due to Polfi6ik and Tereg6fik (see [164,165]). Assertion (ii) was proved by Hess and Polfi6ik [98]. In these papers, a slightly higher regularity, F E C l'~ for some 0 > 0, was assumed. Later TeregSfik [ 197] gave different proofs with FEC l Statements (i) and (ii) combined imply that if F is replaced by F k with a sufficiently large k then a typical trajectory with initial condition in D is convergent. As we discuss bellow, this may not be true for the original map F. However, typical trajectories are convergent if F is a time-t map of a semiflow. COROLLARY 3.4. Let S and D be as in Theorem 3.1. Assume in addition that f o r some to > c~the map S(to) is of class C l and its derivative DS(to)(x) is strongly positive f o r an), x. Then the set of convergent points contains an open and dense subset of D.
PROOF. Let F = S(to). By Theorems 3.1 and 3.3, there is an open and dense subset G C D such that for any x e G the limit set co(x) of x relative to the semiflow consists of equilibria and, at the same time, the discrete orbit of x relative to F approaches a single periodic orbit. This readily implies that co(x) is a single equilibrium. D We remark that in applications the assumption that DS(to)x be strongly positive is hardly a significant additional restriction. For example, if S(t) is the time-t map of (1.1) and (1.2), then DS(to)x is the time-t map of a linear variational equation. One shows its strong positivity using the maximum principle in much the same way as in the verification of strong monotonicity of S(t) (which is the comparison principle formulated above). We have the following corollary on (1.1) and (1.2). COROLLARY 3.5. Let hypotheses (H1)-(H3), (N1)-(N3) be satisfied with m >~ 1. Let D be an open set in X ~ such that (B)
O ( D ) -- {u(., t, uo)" uo E D, t >l O}
is bounded in X ~.
Then there exist an open and dense subset G C D and a positive integer qo such that f o r any uo E G there is a solution c~(x, t) of(1.1) and (1.2)with the following properties: (i) ~ ( x , t) is qr-periodic in t f o r some q ~X2
where v: is the positive vector as in Theorem 3.6, and use it to define the linear stability and instability. Similarly as in Osceledec's theorem in the ergodic theory, one can show
850
P Poldf'ik
that for "most" points z e K, ~l(z) is actually the limit not just the superior limit. Such points are called regular. If K -- co(x) for some point x, one can further show that if co(x) contains a regular point z which is at least neutrally stable in the sense that )~1(z) ~< 0, then z is a periodic point and co(x) is equal to the orbit of z. On the other hand, if each regular point z e co(x) is linearly unstable; that is, )~l (z) > 0, then co(x) cannot attract an open set (and therefore cannot attract two related points). These results are proved in [ 164] as crucial ingredients of the proof of Theorem 3.3. In [ 197], Theorem 3.3 is proved in a different way, the key step being an application of Theorem 3.6 to an auxiliary family of compact strongly positive operators. Smooth strongly monotone maps have another interesting property closely related to Theorem 3.3(ii). It says that if F and D are as in that theorem and p0 satisfies (ii), then (ii) holds (with the same p0) for any map F that is C 1 close to F (see [98]). Thus the bound on the minimal periods of stable periodic orbits is not increased under small perturbations. This is especially interesting if the unperturbed map has no stable periodic orbits, except for fixed points, so that most of its orbits are convergent. The same is then true for the perturbations. By Corollary 3.4, this applies in particular to small perturbations of autonomous equations. See [98,165] for other applications. Let us now discuss the opposite situation, when F has stable periodic points with high minimal periods. In the context of r-periodic differential equations, the situation occurs when there exist periodic solutions of period nr, where n > 1 is an integer (these are called s u b h a r m o n i c solutions). Examples of parabolic equations that admit such solutions where found independently by Tak~ie [194,195] and Dancer and Hess [49]. Their results in particular imply that for some time-periodic nonlinearity f -- f ( t , x , u) the equation ut -- A u + f ( t , x , u ) ,
x E S-2, t > O
(3.1)
(under Neumann or Dirichlet boundary conditions) has linearly stable subharmonic solutions. Although they work with specially chosen domains $2, the result appears to be true for any domain in R N, N ~> 2. The situation is quite different when Equations (3.1) with spatially homogeneous nonlinearities, f = f (t, u), are considered. The existence of stable subharmonics depends on the domain then. As noted in [ 165], the Neumann problem cannot have stable subharmonic solutions if $2 is convex. This follows from a result of Hess [96] saying that any stable periodic solution is necessarily spatially constant and thus satisfies ut = f ( t , u) (see [31, 130] for earlier results of this type for equilibria of autonomous equations). As there are no subharmonic solutions of the scalar ODE, there are no stable subharmonic solution of the reaction-diffusion equation. On the other hand, for some nonconvex domains, spatially homogeneous equations with linearly stable subharmonic solutions have been constructed (see [ 166]). Generally speaking, the strong monotonicity structure does not allow one to obtain information on the asymptotic behavior of every trajectory (as opposed to a typical trajectory). This is well demonstrated by the realization results discussed in the last section. There are interesting additional assumptions, however, which imply that all trajectories are convergent. For example, if for a compact strongly monotone map one is able to show that all fixed points are stable (in the nonlinear sense) then all bounded trajectories are convergent.
Parabolic equations
851
See [1,2,97,191,193] and references therein for theorems of these type and applications. No smoothness hypotheses are needed for such theorems. Often, in monotone dynamical systems, the explicit knowledge of a distinguished class of solutions (equilibria or periodic solutions) allows one to describe the global dynamics in detail; see [22,55,97,208] for examples and further references. Let us briefly discuss a few other results on monotone dynamical systems pertinent to the asymptotic behavior. Revisiting the convergence result of Corollary 3.4, we mention that a more specific description is available on the meager set D \ G containing nonconvergent trajectories. One can show that it is contained in the union of countably many manifolds of codimension 1 that form boundaries of the domains of attraction of stable fixed points or discrete periodic orbits (see [ 144,155,191,193,197]). Our next remark is concerned with the manner typical trajectories of C l strongly monotone semiflows converge to their limit equilibria. It has been proved that if there is no simple ordered arc of equilibria then typical trajectories are eventually monotone in time (see [140,141,155]). The reason is that most trajectories approach their limit equilibrium tangent to a positive or negative eigenvector given by the Krein-Rutman theorem. Absence of simply ordered arcs of equilibria is a generic property of many classes of monotone dynamical systems (cf. [156]). Moreover, what is perhaps more interesting, one can ensure it assuming that the nonlinearity in the equation is analytic and the set of fixed points is bounded (see [107,108,187,207,213] for results of this type). Several authors have studied the asymptotic behavior of strongly monotone dynamical systems with an additional structure. Systems equivariant under a monotone action of a continuous symmetry group were studied in [145,192] and more recently in [136, 137]. A representative theorem says that a typical trajectory approaches a set of symmetric points. This result holds for systems with continuous as well as discrete time and does not depend on any smoothness assumptions. Applications include reaction-diffusion equations (3.1) where f -- f ( t , u) is independent of x and locally Lipschitz, and ~ is a rotationally symmetric bounded domain (a ball or an annulus). One obtains that a typical solution of such an equation under Dirichlet or Neumann boundary condition is asymptotically radially symmetric. To conclude the section we mention other types of equations that define strongly monotone dynamical systems on an appropriate Banach space. Scalar parabolic equations of much more general form than (1.1) have been studied from this point of view. For example, see [ 102] for a discussion of compact strongly monotone semiflows generated by quasilinear equations. One can also allow for nonlinear Robin boundary conditions, however, in that case the above abstract results do not apply directly. One has two possibilities to treat nonlinear boundary conditions: either consider a semiflow on a Banach submanifold (given by the nonlinear boundary condition) of a strongly order space, or, as in [5], consider the semiflow on a larger Banach space in a scale of interpolation spaces where the boundary conditions do not take place. In the first case, one needs to adjust the "linear" setting of the above results and in the second case one has to allow for a more general notion of strong monotonicity (Matano's definition of strongly order-preserving systems is more appropriate here). In either case modifications are straightforward. Strongly monotone semiflows or maps are also generated by certain types of systems of reaction diffusions. Cooperative systems of any number of equations or competitive
852
P Pold(ik
systems of two equations are such examples (cf. [97,101,186]). For a discussion of strongly monotone maps generated by delay equations or reaction-diffusion equations with delays we refer the reader to [ 186] and [ 127,211 ].
4. One space dimension
The results stated in the previous section show that typical bounded trajectories of (1.1) and (1.2) exhibit a relatively simple asymptotic behavior- convergence to equilibria or periodic solutions. Unless additional structure of the equation is assumed, one cannot expect such a simple description to be valid for all bounded solutions (cf. Section 7). In this section, we discuss one-dimensional problems; that is, we assume N -- dim s to be equal to 1. In this case, the dynamics of bounded solutions is much better understood. A crucial property that distinguishes 1D equations among all problems (1.1) and (1.2) is that the Jordan curve theorem applies in the (x, t) space. In conjunction with the maximum principle it implies an interesting p r o p e r t y - the nonincrease of the zero number. In this section we discuss its consequences on asymptotics of bounded solutions. For a continuous function w:[0, 1] --+ IR let z(w) denote the number (possibly infinite) of zeros of w in (0, 1). We say that a differentiable function w has a multiple zero at x0 E [0, 1] if w(xo) = w'(xo) = O. Consider a linear parabolic equation of the following form Vt = V x x -+- b(x,
t)Vx + c(x, t)v,
x 6 (0, 1), t 6 (0, T),
(4.1)
where b, c are functions in L ~ ( ( 0 , 1) x (0, T)) (T ~< ~ ) . We couple (4.1) with separated boundary conditions fl(X)Vx + y ( x ) v = O ,
x=0,1,
(4.2)
where (fl(x)) 2 + (y(x)) 2 > 0 (x = O, 1) or with periodic boundary conditions v(0, t) = v(1, t),
vx(O, t) = Vx(1, t).
(4.3)
LEMMA 4.1. Let v(x, t) be a solution of(4.1) and (4.2) or of(4.1) and (4.3). If v ~ 0 then the following statements hold true: (Zl) z(v(., t)) is finite f o r any t > 0; (Z2) z(v(., t)) is nonincreasing in t; (Z3) (Diminishing Property). If v(., to) has a multiple zero in [0, 1]for some to ~ (0, T), then z(v(., t)) drops strictly at t = to, that is, f o r any 0 < tl < to < t2 < T one has z(v(., tl)) > z(v(., t2)). Statement (Z2) is relatively simple, it follows by an application of the maximum principle in two-dimensional domains. Results of this kind can already be found in a paper of Nickel from 1962 (see [149]), but they became widely used in the study of nonlinear equations mainly due to Matano's work [ 131 ]. The other two statements were first proved
Parabolic equations
853
by Angenent [8] under stronger regularity requirements on the coefficients. A more recent theorem of Chen (see [36]) only needs b, c ~ L ~ ( ( 0 , 1) x (0, T)) and in addition it gives a detailed description of the nodal set of solutions (see [ 11,40,61 ] for related results on the zero number). Let us now consider nonlinear equations ut=uxx+
f(t,x,u,
ux),
xr
t>0,
(4.4)
assuming first the separated boundary conditions fl(x)vx + y ( x ) v = O,
x = O, 1
(4.5)
((fl(x)) 2 + (V(x)) 2 > 0 (x = 0, 1)). The nonlinearity f is assumed to satisfy hypotheses (N 1)-(N3) of Section 2. Applications of Lemma 4.1 in the study of the nonlinear problem are facilitated by the observation that the difference v of any two solutions of (4.4) and (4.5) is a solution of a linear problem (4.1) and (4.2). Obviously, since z(v(., t)) is finite, it cannot drop infinitely many times. This implies, in view of the zero number diminishing property, that beginning with some t > 0, v(., t) has only simple zeros. We show a typical way this property is used when giving the proof of the convergence result of Theorem 4.2. We use the notation of Section 2: X ~ is the state space of (4.4) and (4.5), and it is continuously imbedded in C~[0, 11. We stress that in Theorems 4.2, 4.3 we assume that the nonlinearity f is merely locally Lipschitz in u, ux. This assumption is sufficient for the equation for differences of any two solutions to have L ~ coefficients, hence Chen's zero number results [36] can be used. Originally, the theorems were published with the assumption of f being of class C l (at least). THEOREM 4.2. Let hypotheses (N 1)-(N3) be satisfied (with N -- 1). Let u(-, t), t > O, be any solution o f (4.4) and (4.5) that is global and bounded in X ~. Then there is a solution cp(x,t) of(1.1) and (1.2) that is r-periodic in t and such that ]u(.,t, u o ) - c P ( . , t ) lx~ --+ O
ast--+ ec.
If f is independent of t then so is 4) (it is thus an equilibrium).
This theorem has been proved in a more general context (allowing separated nonlinear boundary conditions and, with some restrictions, fully nonlinear equations) by Brunovsk~ et al. [29]. For spatially homogeneous equations, the result was obtained earlier by Chen and Matano [37] together with an additional symmetry information on the limit periodic solution. For autonomous equations, Zelenyak [212] proved the convergence, as early as in 1968, using his construction of a Lyapunov functional. Later Matano [ 129] gave a different proof (see also [89]). We include the proof of Theorem 4.2 for Neumann boundary condition as an illustration of the use of the zero number.
P Poldgik
854
PROOF OF THEOREM 4.2 FOR f l ( x ) ~- 1, F(x) = 0. The assertion is equivalent to the convergence of the discrete trajectory {u(., nr)}n to a fixed point of the period map. We first prove that the real sequence u (0, n r) is convergent. As X c~ ~-~ C l [0, 1], this sequence is bounded. Take the following difference of two solutions of (4.4) and (4.5): v(., t) := u(., t + r) - u(., t). As remarked above, Lemma 4.1 implies that v(., t) has only simple zeros for all sufficiently large t. In particular, by Neumann boundary condition, v(0, t) = u(0, t 4- r) - u(0, t) is nonzero for all sufficiently large t. This implies that the bounded sequence u(., n r) is eventually monotone, therefore convergent. Let s~ denote the limit of u (0, n r). Let COd(u) C X ~ denote the CO-limit set of the discrete trajectory {u(., nr)},z. Clearly, if 4) ~ COd(U) then 4~(0) is a limit point of u(0, n r ) thus
r
=~.
Let r q~2 E COd(t/) be arbitrary. We show they are equal. We take these functions as initial conditions for (4.4) and (4.5), denoting the corresponding solutions by Ul (x, t), u z(x, t), respectively. By the invariance of CO-limit sets under the period map, we have ui (., n r ) 6 COd(t~) for any positive integer n. Hence, U l (0, n r ) = u2(0, n r ) = ~ for any n. Now, take the difference of these two solutions:
v(x, t) = Ul (x, t) - u2(x, t). We have shown that v(0, n r ) = 0 hence, by Neumann condition, v(x, n r ) has a double zero at x = 0 for any n = 0, 1 . . . . . By the zero number diminishing property this is only possible if v = 0, in particular, t~l = ~2. This shows that COd(U) is a singleton thus u(., n r ) is convergent as asserted. [2 With periodic boundary conditions the zero number can still be applied. It does not yield the convergence of bounded solutions, however. To appreciate the difference in applications of the zero number to separated boundary conditions and periodic boundary conditions, consider the autonomous case f = f ( x , u, Ux). Let u be a solution of (4.4) with separated boundary conditions (4.5) or with periodic boundary conditions u(0, t) = u(1, t),
Ux(0, t) = Ux(1, t).
(4.6)
Then v ( x , t ) : = u t ( x , t ) solves a linear equation (4.1). By Lemma 4.1, the vector (v(O, t), Vx (0, t)) is nonzero for all sufficiently large t. In the case of separated boundary condition this implies that for a sufficiently large T the orbit {u(., t): t ~> T} continuously imbeds in R. For example, in the Neumann case, we have v(0, t) = ut (0, t) :~ 0 for large t (cf. the above proof), thus the map u w-~ u Ix=0 gives an imbedding of the orbit in •. In the case of periodic boundary conditions, no relation between v(O, t), vx(O, t) is postulated. Here, the vector map u ~ (u, Ux)lx=0 is to be considered and the imbedding of the orbit in the plane appears an optimal property one can try to prove. Verifying this property for orbits in the w-limit set, Fiedler and Mallet-Paret consequently obtained the following Poincar6-Bendixson-type theorem (see [67]).
Parabolic equations
855
THEOREM 4.3. Let hypotheses (N1)-(N3) be satisfied and let f be independent o f t . Let u(., t), t > O, be any solution of(4.4) and (4.6) that is global and bounded in X ~. Then the co-limit set o f u is either a single periodic orbit or it consists o f equilibria and connecting (homoclinic or heteroclinic) orbits. For time-periodic equations with periodic boundary conditions one does not expect a simple asymptotics of solutions in general. In fact, Fiedler and Sandstede [71,181 ] have shown that chaotic behavior exhibited by some time-periodic planar vector fields can also be found in time-periodic equations with periodic boundary conditions. One can still prove that each co-limit set is imbedded in the plane, however. THEOREM 4.4. Let hypotheses (N1)-(N3) be satisfied with m >~ 1. Let u(., t), t > O, be any solution of(4.4) and (4.6) that is global and bounded in X ~. Then the co-limit set co~l(u) o f the discrete trajectory {u(-, nr)}, imbeds in ]K2; that is, there is a one-to-one continuous map M from co~t(u) into ~2. This theorem is due to Tereg~fik (see [198]). The proof is not as simple, as our earlier remarks could suggest (the proof is much easier in the autonomous case). Of course, for discrete trajectories, there is no consequence like Poincar6-Bendixson theorem. If f does not depend on x, f = f (t, u, ux), the equation is equivariant with respect to the natural action of the symmetry group S l: O ~ u(. - O) : S ! --+ X ~.
In this case, a more specific description of co~/(u) has been found by Fiedler and Sandstede: coj (u) is either a periodic orbit or a circle. In either case, cocl(u) is a subset of the group orbit 4~(" - 0): 0 ~ S l of a point 4~ c X ~ (see [71]). In particular, in the autonomous case, any periodic solution is a rotating wave; that is, it equals ~o(x - ct) for some 1-periodic function ~0 and constant c. The latter result was proved earlier by Massatt [128] and Matano [135] (see also [ 11,35,37]). It is an interesting question whether some of the above results are valid if the equation is perturbed so that the new equation does not have the form (4.4). As a typical example, one can consider a perturbation obtained by adding a nonlocal function eg(x, t, u, Ft) to the right-hand side of (4.4). Here e is a number, g is a smooth function r-periodic in t, and t~ is the spatial average of u" ft - f~ u d x . The zero number functional, considered along differences of solutions of such a perturbed equation, has no longer the nonincrease property in general. In fact, the dynamics of the nonlocal equations appears to be rather complicated (see [68,74,163]). However, if e is sufficiently small one can establish convergence properties similar to those formulated above for the local equations. There two different approaches to such perturbation problems. The method proposed by Chen and Polfi~ik [39] requires separated boundary conditions and is based on a study of Morse decompositions for the period map of (4.4) and (4.5). As shown in [39], there exist Morse decompositions with invariant normally hyperbolic curves as Morse sets. This robust structure can be effectively used to study perturbations of (4.4) and (4.5).
856
P PolT(ik
A different approach was used by Tere~6~ik in his thesis [198]. There he was able to prove that any perturbation of (4.4) and (4.5) or of (4.4) and (4.6), which is small in an appropriate C l sense, inherits the properties of the unperturbed problem as stated in the above theorems. In particular, in the case of separated boundary conditions he obtains the convergence of discrete trajectories to fixed points, and in the case of autonomous equations with periodic boundary conditions he proves the PoincarT-Bendixson theorem. The method of [ 198] is based on another robust structure of the one-dimensional problems, the so called Floquet bundles and exponential separation for linearization of (4.4). We give some details on this interesting structure. It is an extension of the classical SturmLiouville theory which goes on similar lines as the extension of the Krein-Rutman theorem presented in the previous section. We formulate a theorem on Floquet bundles for linear equations (4.1) with b(x, t) = 0 (in the case of Dirichlet and periodic boundary conditions this can be achieved by means of a suitable substitution, cf. [44]). In the theorem 13 denotes the set of all functions c 9 L ~ ( ( 0 , 1) • IR) whose L ~ norms are not greater than a fixed constant R. The set/3 is endowed with the weak* topology of L ~ ( ( 0 , 1) • R). By a direct sum of an infinite set of subspaces of X ~ we mean the closure of the union of all finite sums of those spaces. THEOREM 4.5. Consider a linear problem (4.1) and (4.2) with c 9 13 and b = O. There are subspaces Yi (t; c), c 9 t 9 R, i = 0, 1 . . . . . of X ~ with the following properties: (i) Yi(t; c) = span{vi(.,t; c)}, where vi(.,t; c) is a solution of (4.1) and (4.2) on R with z(vi(., t; c)) =_ i; the map c ~-+ v i (., t" c ) "]3--+ X ~ is continuous (t 9 IR). (ii) One has oo
X ~ -- @
Yi (t; c)
( t 611~, c 6 1 3 ) .
i=0
(iii) (Invariance) Let k
Z~-(t;c)--(~Yi(t'c) i:0
oo
and
Z + (t; c) = @
Yi (t; c).
i:k+l
Then the space Z-~(t; c) is invariant in the sense that f o r any vr e Z~-(r; c) there is a solution v(., t), t e R, of (4.1) and (4.2) with v(., r) - vr such that v(., t) e Z~- (t; c) (namely, v is an appropriate finite linear combination of the solutions vi(., t; c)). This solution satisfies z(v(., t; c)) 0 f o r all x ~ ~ and in the latter case O,.z(r) < Of o r r ~ (0, 1).
862
P. Pol6(ik
Having established the symmetrization of solutions as t --+ ~ , we next discuss their temporal asymptotics in case f is r-periodic in t and S2 is the ball. An underlying idea is that the large time behavior of positive solutions is "governed" by radially symmetric solutions. The latter satisfying a one-dimensional problem, one should be able to use the zero number arguments, as discussed in the previous section. The following theorem materializes the idea. THEOREM 5.3. Let the hypotheses o f Theorem 5.1 be satisfied Further let S-2 be a ball and f be r-periodic in t and o f class C l in u. Let u be as in Theorem 5.1. Then there exists a solution p(., t) of(5.3) and (5.4), that is r-periodic and such that
Ilu(.,t)- p(., t)ll
0
a s t ---> ec.
Theorem 5.3 and Corollary 5.2 give a complete space time asymptotics of positive bounded solutions on a ball. We remark that a similar result is not to be expected if (5.3) and (5.4) does not have the full radial symmetry. In fact, solutions that are merely reflectionally symmetric can be viewed as general solutions of a boundary value problem on the (still multidimensional) subdomain 1-20 = {x 9 S-2: x l > 0}. Most likely, there is no restriction as to how complicated such solutions can be in general (this has not been proved however). Theorem 5.3 is due to Chen and Polfi~ik [40] (for autonomous equations an analogous convergence result was proved in [93]). The conclusion of the theorem is equivalent to the statement that the discrete trajectory {u(.,nr)},, converges, as n ~ ~ , to a single element of X ~, necessarily a fixed point of the period map of (5.3) and (5.4). In other words, it states that coo, the co-limit set of this discrete trajectory, is a singleton. We sketch the main steps of the proof of the latter property. As before, we denote by F the period map of (5.3) and (5.4). By F~ we denote the restriction of F to Xr~, the subspace of X ~ consisting of radially symmetric functions. Note that F~ is the period map of the problem N-1 ut = Ur,- + - - u r r
u,.(1, t) = 0 = u(1, t),
+ f (t, u),
r 9 t > 0.
t>0,
(5.5) (5.6)
By Corollary 5.2 we know that coo is a subset of X~, in fact it is a compact invariant set of Fr. The first step of the proof of Theorem 5.3 consists in showing that coo is a set of fixed points of F~. One starts by noting that all points of coo are chain recurrent points of Fr (not only of F, which is standard). Then a result of [39] can be used which says that all chain recurrent points of one-dimensional equations with separated boundary conditions are fixed points. The necessary zero number theorems that facilitate an adaptation of this result to singular equations (5.5) are given in [40] (see also [9]). Once it is known that coo consists of fixed points, one can use local analysis to prove that there is only a single fixed point in coo. This involves understanding of the spectrum of the linearization F' (~0), where q9 is a fixed point of F. Only relevant are fixed points that may occur as limit points of a nonnegative solution, which allows one to assume that q9 ~> 0 and
Parabolic equations
863
even 05(., t) ~> 0, where 4)(', t) is the r periodic solution of (5.3) and (5.4) with 05(., 0) = 99Of course, such a 0(', t) is radially symmetric. Here one finds another interesting property related to symmetry: all unstable modes of the linearization, and in most cases also the central modes, are radial. More precisely, the following relations hold for the spectra of the compact operators F' (q)) and Fr'(qg). (SP) Let q9 ~ 0, if ,k 9 C with Ikl > 1 is an eigenvalue of F'(q)) then its generalized eigenspace consists of radially symmetric functions. In other words, F'(qg) and F,! (qg) have the same generalized eigenfunctions corresponding to any eigenvalue i. with [)~l > 1. If moreover, q),.(1) =/=0 then the same assertion holds for any ,k with
IZl >/1.
The property is proved in a more general context (reflectional symmetry) in [40]. We come back to it in a moment. Now, the spectrum of Fi(~0) is found by one-dimensional techniques. One obtains in particular that it consists of simple positive real eigenvalues (and 0). Using (SP) we thus obtain that if q)r(1) % 0 then cr(F' (qg)) A {Ikl -- 1} consists, if nonempty, of a single element )~ = 1 and it is then a simple eigenvalue. This situation is well fitted for application of an abstract convergence result of Hale and Raugel [89]. One concludes that if coo contains a ~0 with q),.(1) =/= 0 then it is actually equal to {q)}. As q),-(1) r 0 may fail for at most one radially symmetric fixed point (this is shown using zero number again), we obtain that coo is a singleton in any case. (Note that the abstract result of [89] is discussed in detail in the next section.) Symmetry of unstable modes of positive periodic solutions, as used in the proof, is a property of independent interest. For equilibria of autonomous equations this property has been around for a while; it has been employed in the study of symmetry breaking bifurcations at positive solutions (see [32,46,190,203]). We now formulate a more general theorem, due to Babin and Sell, which applies to positive solutions that are not necessarily periodic. They proved it for general nonautonomous fully nonlinear equations satisfying appropriate symmetry hypotheses, but we do not enter their general setting here. The theorem is somewhat similar in flavor to the exponential separation theorems stated in Sections 3 and 4. For an entire solution (that is solution defined for all t 9 R) of (5.3) and (5.4) that is positive and bounded we consider solutions of the following linear variational equation that are defined for t ~< 0
vt = Av + ft,(t, u)v, v = 0,
x 9s
(5.7)
x 9 0s
(5.8)
Note that if both f and u are r-periodic in t then the unstable eigenspace of the period map of this equation consists of values v(., 0) of solutions v(., t) that converge to zero exponentially as t --+ - e c . Here the unstable eigenspace refers to the generalized eigenspace corresponding to the spectral set {k: ]k] > 1 }. THEOREM 5.4. Let hypotheses (D1)-(D3), (M1) be satisfied and let (M2) be satisfied with the interval [0, oc) replaced by ( - o c , oc). Let u(., t), t 9 II~, be an entire positive bounded solution of (5.3) and (5.4). Let v be a solution of (5.7) and (5.8), that is defined
864
P PoMgik
on ~ x ( - ~ , 0]. If IIv(', t)llL~ ~ 0 as t -+ - o o , then v(., t) is symmetric about the hyperplane Ho for any t ~ 2. l f Y is the class o f nonlinearities as in Theorem 7.1 then the following statement holds true f o r any bounded domain S-2 in R N. There is a function f ~ Y such that (7.1) and (7.2) realizes an ODE with a transverse homoclinic orbit. If Y is the class o f spatially homogeneous nonlinearities, as in Theorem 7.2, then the same statement holds f o r some smooth domain S-2 diffeomorphic to the ball in IRN. We next discuss examples of trajectories with high-dimensional co-limit sets. The idea is to use properties of normally hyperbolic invariant manifolds and Anosov flows. Consider an ODE (7.3) with the following properties: (i) (7.3) has a compact invariant C 1 manifold M C B of dimension m that is normally hyperbolic, and (ii) the flow of (7.3)on M is Anosov and transitive. We are not going to give precise definitions of these concepts. For thorough studies of normally hyperbolic manifolds see [ 17,24,64,103,210]. Important for our purposes is that normally hyperbolic manifolds are persistent in the sense that any small C 1 perturbation of (7.3) has an invariant manifold M given by a near identity imbedding of M in B. An Anosov flow on M is a flow that has a hyperbolic structure on the whole of M, its linearization expands some direction and contracts other directions, where these directions together with the flow direction span the whole tangent bundle of M (see [ 126,172] for the definition and background). For our arguments, it is only relevant that any Anosov flow ~p on M is structurally stable: any other flow ~ on M that is C 1 close to ~p (more precisely ~(., t) is required to be C I close to ~p(-, t) uniformly for t in a compact neighborhood of 0) is C o equivalent to ~ (see [172, Theorem 9.8.1 ]). A flow on M is transitive if it has a positive semiorbit that is dense in M. One can show that for any m ~> 3 there exits an n and an ODE (7.3) that has the properties (i) and (ii) (see [51 ]). Combining the persistence property of M with structural stability of Anosov flows, one then obtains that any sufficiently small C j perturbation of (7.3) has an invariant manifold M the flow of which is C o equivalent to the flow of (7.3) on M. In particular, the perturbation has a dense semiorbit in M. Density realization theorems imply that one can choose such a perturbation that is realizable in the given class of PDEs. We thus obtain the following result (see [51 ]). COROLLARY 7.4. Fix integers N >~ 2 and m >~ 3. If Y is the class o f nonlinearities as in Theorem 7.1 then the following statement holds true f o r any domain I-2 in IRN. There is a function f ~ Y such that (7.1) and (7.2) has an invariant manifold M o f dimension m such that the flow o f (7.1) and (7.2) on M is C o equivalent to an Anosov transitive flow. In particular, (7.1) and (7.2) has a trajectory whose co-limit set coincides with M. If Y is the class o f spatially homogeneous nonlinearities, as in Theorem 7.2, then the same statement holds f o r some smooth domain S-2 diffeomorphic to the ball in IRN. Let us now discuss the main ingredients of the proofs of Theorems 7.1 and 7.2. We first indicate a general scheme of the proof that can easily be adapted to other problems.
P. Polgt(ik
872
Let Y be the space of functions as in Theorems 7.1 or 7.2. Consider problem (7.1) and (7.2) in the following form
u, = Au + a(x)u + g(x,u, Vu), u = 0,
xe,0,
(7.5)
xeOs
(7.6)
t>0.
Here g e Y and a is a C l function which is constant if the class of homogeneous equations is considered. Suppose we are given an n (for the dimension of B in (7.3)) and want to prove the density realization theorem for ODEs (7.3). We make two assumptions on the linear part of the equation: (L 1) The operator A + a (x), under Dirichlet boundary condition, has kernel X I of dimension n. (L2) A set of LZ-orthonormal eigenfunctions ~Pl . . . . . ~o,, of A + a(x) that span Xl satisfy a certain algebraic independence condition. Assumption (L 1) allows us to construct invariant manifolds of 7.5 and 7.6 if g is close to 0 in Y. Condition (L2) comes out of computations of vector fields on the invariant manifolds. We will be more specific about it below. Of course, at some point we will have to worry about the existence of an operator satisfying (L 1) and (L2). The procedure is further summarized as follows. Step 1. The center manifold reduction. This yields a vector field V (g) representing the flow of (7.5) and (7.6) on an invariant manifold. Step 2. Investigation of the map g w-> V (g). The goal is to derive a sufficient condition for (local) density of the range of this map. This is where the second requirement, (L2), on the linear part comes about. Step 3. Construction of an operator A + a (x) that satisfies both (L 1) and the algebraic independence condition (L2) as computed in Step 2. Step 1 is a standard application of the center manifold theorem [42,94,177,204,205]. Taking g in a sufficiently small neighborhood U of 0 in Y, one finds an invariant manifold of (7.5) and (7.6) of the form
w+, - {+ + o-++(+). + c
}.
Here ag is a function defined on X l with values in a complement X2 of X I in X~; it is of class C l in ~ and g, and if g is of class C k in u and w then O-g(.) is also of class C k. Solutions of (7.5) and (7.6) in Wg have the form u(., t) = ~(t) +ag(~(t)), where ~(t) e XI. One can now write down an ODE for ~ (t) by substituting the last expression for u in (7.5) and applying to (7.5) the projection P : X --+ X1 with kernel X2 (this is a spectral projection of A + a(x)). This yields
-- V(g)(~)"- P~(~ + ~g(~)), where ~': X ~ ~
(7.7)
X is the Nemitskii operator of g (cf. Section 2). We refer to (7.7) as the
center manifold reduction of (7.5) and (7.6). It is an ODE on X l ~" ]K'~. In terms of our earlier definition, (7.5) and (7.6) realizes (7.7) on the invariant manifold Wg.
873
Parabolic equations
Note that for g = 0 we have V (0) = 0 as X l is the center manifold for the linear equation consisting of equilibria. Passing to the second step, we consider the restriction of V (g) to an open bounded set in X~ (the reason is that the Weierstrass approximation theorem will be applied). This constitutes a map,
gl-> V(g):
Y --->
CI(B-, Xl),
whose range consists of realizable vector fields. It would be optimal if we could prove that the range of this map is the whole space C l (B, X l) or at least that the range contains a neighborhood of 0 in C I(B, X l). Any ODE on B would then be realizable (note that any vector field becomes small in the C l norm after a time rescaling). It is tempting (see [84,85]) to apply a local surjective mapping theorem to V to obtain the conclusion. This, however, is not so easy as one has to face the typical difficulties associated with self-composition of functions (see the definition of V (g)) and a loss of derivatives linked to it. See [178-180] for a more-detailed discussion of this problem and the N a s h - M o s e r technique that can sometimes help to deal with it. All these difficulties are avoided if the density realization, rather then full realization, is set as the goal. In this case we proceed as follows. For a small e, consider the vector field e - 1 V ( e g ) . It has the same dynamics as V (eg), with a different time scale, so the corresponding ODE is realizable. Further,
E-1V(eg)(~) -- P2(~ + a~e(~)) -- P~'(~) + o(~)
(~ 6 Xl)
because o-e~ ~ 0 as e ~ 0. For density realization it is therefore sufficient to neglect the small error term and show that the range of the linear map
g ~-> P~'(.) " Y --+ CI (-B, XI ) is dense in C I(B, X l). Regularity issues involved in necessary C l estimates of the error term are taken care of by considering a subspace of Y consisting of more regular functions. Using a little more sophisticated argument, relying on a scaling and the Weierstrass approximation theorem, one can find yet simpler sufficient conditions for density realization. Namely, it is suffices to show that for some fixed ~ E X l and any integer k, the map g w-> j .k ~ P~'(.) is surjective. Here j .k ~ stands for the k-jet; that is, the vector of coefficients of the kth order Taylor expansion of the given function at ~ . The map is defined on the subspace of Y consisting of C k functions and its target space is a finite-dimensional space ofjets (see [51,159] for the proof of sufficiency of this weaker condition). One can now formulate the surjectivity of the finite dimensional map in terms of eigenfunctions ~Pl . . . . . ~01, of A + a ( x ) . For example, in the simplest case, when Y is chosen to consist of all (not necessarily linear) functions of the form g(x, u, w) = g(x, w l ) , the surjectivity condition requires that the functions
q3i (0~., ~1 )/4'... (OXl ~On)/4'' be linearly independent. Here i ---- 1 . . . . . n and fl = (ill . . . . . /3,l) varies among all positive multiindices of norm not greater than k (if the k-jets are being prescribed). These algebraic
874
P. Pold(ik
expressions appear in the computation of the k-jet of ~ ~ V ( g ) ( ~ ) at ~ = 0 when one uses the real coordinates on X l: = rl ~Ol + . . . + rn~Pn,
and the integral formula for the spectral projection:
Pu--~~oi(')fs2~oi(x)u(x)dx. i=l
The linear independence of the algebraic expressions is what we vaguely stated above as condition (L2). With different choices of the space Y one obtains different algebraic expressions; they are more involved with Y as in Theorem 7.1 and even more so for Y consisting of spatially homogeneous functions (see [ 168] and [51 ] for the corresponding formulas). After the algebraic independence conditions has been derived, it remains to find an operator A + a ( x ) that satisfies both requirements (L1) and (L2). This is the last step, usually the most difficult and technical part in the proof. To start up, one chooses a special domain where the Laplacian has eigenvalues of arbitrarily high multiplicity, so that (L1) holds for some constant a (x) = a0, and the eigenfunctions are known explicitly to some extent. Typically then, the algebraic independence condition is not satisfied. One therefore tries to achieve it using a perturbation. This is quite delicate as a high multiplicity of an eigenvalue is to be preserved at the same time. Moreover, in the spatially homogeneous case, one has the additional constraint that a (x) has to remain constant, so only the domain can be perturbed. A reasonably general procedure to deal with such perturbation problems has been developed by Dancer and Polfi6ik [51 ]. That procedure yields the operator as needed on some domain. In case a (x) is allowed to depend on x, as in Theorem 7.1, one can proceed further and find an operator satisfying (L1) and (L2) on an arbitrary domain. Such a construction is described in a recent work of Prizzi and Rybakowski (see [ 169]). Their results do not apply in the spatially homogeneous case; this is the reason for the difference in the formulations of Theorems 7.1 and 7.2 regarding the domain. We now proceed with a brief discussion of realization results for other special classes of Equations (1.1). First at hand are equations, both autonomous and time-periodic, that do not depend on Vu. The semilinear heat equation ut = A u + f ( x , u ) ,
u = 0,
x6~,
t>0,
x E 0 ~ , t > 0,
(7.8) (7.9)
defines a gradient-like semiflow on any invariant manifold. This of course constraints the class of realizable vector fields. Following the scenario of the density realization given above, one can prove that any gradient vector field on B has an arbitrarily small perturbation that is realizable in (7.8) and (7.9). Although this result does have interesting consequences on the global dynamics (see [ 160]), from the point of view of the asymptotic
Parabolic equations
875
behavior of single trajectories it is probably of no use; in robust gradient systems all trajectories converge to an equilibrium. So, for example, nonconvergent bounded trajectories cannot be found by density realization, not even in its strengthened version, realization of families of vector fields, as discussed in [ 160]. An ad hoc realization procedure to show the existence of nonconvergent trajectories was found by Polfi~ik and Rybakowski [ 162]. They proved the following theorem. THEOREM 7.5. Let F2 be a disk in ~2. For any positive integer k, there exists a C k function f : #2 x ~ --+ R such that problem (7.8) and (7.9) has a bounded solution that approaches, as t ---> ~ , a subset o f X ~ homeomorphic to the circle. As discussed in the previous section, examples of nonconvergent bounded trajectories do not exist if f is analytic. They probably do exist with f e C a but the results of [162] do not imply that. Also, no such example has been found for a spatially homogeneous equation (7.8). If the nonlinearity in (7.8) is allowed to depend on time periodically, f = f ( t , x, u), then the corresponding dynamical system is no longer gradient-like. Introducing the notion of realizability of time-periodic ODEs (see [158]), one can prove both linear and density realization theorems for such equations (the detailed proof is to appear). Similarly as for autonomous equations, these results imply existence of chaos and high dimensional w-limit sets for equations with f -- f ( t , x , u); the dimension of the domain #2 can again be arbitrary (greater than 1). Previously, the existence of 2-dimensional co-limit sets was shown by Dancer [47]; see also [71 ] for related results for equations on S l . No such realization result has been proved for spatially homogeneous time-periodic nonlinearities f -- f ( t , u). We have mentioned above that moderating our goal from complete realization to density realization made the whole process feasible. It is nice about the procedure that it has many general features that can be used in other classes of equations. Complete (not just density) realization theorems are still of interest, however. We mention the following one. THEOREM 7.6. Let #2 be an arbitrary domain in ]~N, N >~ 2. For any function h in C ~ ( ~ X + l , ~'~x § ) the ODE = h(~) on ]~N-+-I can be realized in (7.1) and (7.2) with f ~ C~ (#2 x R x ]~N). Note that this realization result is not independent of the spatial dimension, only ODEs on •X+! can be realized. With this limitation, the result shows that arbitrary dynamics can be found on finite dimensional invariant manifolds of (7.1) and (7.2) with a general nonlinearity. Theorem 7.6 was proved by Polfi6ik and Rybakowski [161] for special domains #2; it was extended to any domain by Prizzi and Rybakowski [169], see also [167]. Other complete-realization theorems can be found in [157,178]. As we know from the theory of monotone dynamical systems, most bounded solutions of (7.1) and (7.2) converge to an equilibrium (or to a periodic solution if time-periodic equations are considered). Thus the invariant manifolds with complicated dynamics, as obtained
876
P Pold(ik
by the realization techniques, are necessarily unstable. An interesting problem arises as to what is the minimal possible "unstable dimension" of such manifolds. More specifically, in the above construction, where the manifolds are small perturbations of ker(A + a (x)), the unstable dimension can be defined as the number of positive eigenvalues of A + a(x). This number coincides with the dimension of the leaves of the unstable foliation near 0. When N = 2, there are restrictions, at least when using self-adjoint linear part, on how small the unstable dimension can be. Indeed, there must be many positive eigenvalues of A + a(x) should the kernel have high dimension, see [23,41,104] for precise estimates. In higher dimensions, however, it is likely that the whole construction can be done with A + a (x) having high dimensional kernel and only one positive eigenvalue. Phrased differently, there seem to be no restriction on the possible multiplicity of the second eigenvalue of A + a(x) (see [23] for a closely related discussion of the multiplicity problem for operators on manifolds without boundary). However, one still has to meet the algebraic independence condition on the corresponding eigenfunctions. This has not been done so far.
Acknowledgment The author is indebted to Peter Bates, Xu-Yan Chen, Bernold Fiedler and Kening Lu for their remarks and suggestions. He is particularly thankful to Pavol Brunovsk3~ and Jack Hale for their continuous encouragement and for their comments on the manuscript. This paper was written while the author was enjoying the excellent working environment at the School of Mathematics, Georgia Institute of Technology.
References [1] N.D. Alikakos and E Hess, Liapunov operators and stabilization in strongly order-preserving dynamical systems, Differential Integral Equations 4 (1991), 15-24. [2] N.D. Alikakos, E Hess and H. Matano, Discrete order preserving semigroups and stability for periodic parabolic differential equations, J. Differential Equations 82 (1989), 322-341. [3] H. Amann, Fixed point equations and nonlinear eigenvalue problems in ordered Banach spaces, SIAM Rev. 18 (1976), 620-709. [4] H. Amann, Global existence for semilinear parabolic systems, J. Reine Angew. Math. 360 (1985), 47-83. [5] H. Amann, Quasilinear parabolic systems under nonlinear boundary conditions, Arch. Rational Mech. Anal. 92 (1986), 153-192. [6] H. Amann, Linear and Quasilinear Parabolic Problems, Birkh~iuser, Berlin (1995). [7] S. Angenent, The Morse-Smale proper~ for a semilinear parabolic equation, J. Differential Equations 62 (1986), 427-442. [8] S. Angenent, The zeroset of a solution of a parabolic equation, J. Reine Angew. Math. 390 (1988), 79-96. [9] S. Angenent, Solutions of the 1-d porous medium equations are determined by their free boundary, J. London Math. Soc. 43 (1990), 339-353. [ 10] S. Angenent, Parabolic equations for curves on surfaces. II. intersection, blow-up and generalized solutions, Ann. of Math. 133 ( 1991), 171-215. [ 11 ] S. Angenent and B. Fiedler, The dynamics of rotating waves in scalar reaction diffusion equations, Trans. Amer. Math. Soc. 307 (2) (1988), 545-568. [ 12] R. Aris, Mathematical Theory of Diffusion and Reaction in Permeable Catalysts, Clarendon Press, Oxford (1975).
Parabolic equations
877
[13] B. Aulbach, Continuous and Discrete Time Dynamics Near Manifolds of Equilibria, Springer, Berlin (1984). [14] A.V. Babin, Symmetrization properties of parabolic equations in symmetric domains, J. Dynamics Differential Equations 6 (4) (1994), 639-658. [ 15] A.V. Babin, Symmetry of instabilities for scalar equations in symmetric domains, J. Differential Equations 123 (1) (1995), 122-152. [16] A.V. Babin and G.R. Sell, Attractors of non-autonomous parabolic equations and their symmetry properties, J. Differential Equations 160 (1) (2000), 1-50. [ 17] P.W. Bates, K. Lu and C. Zeng, Existence and persistence of invariant manifolds for semiflows in Banach space, Mere. Amer. Math. Soc. 645 (1998), 1-129. [ 18] J. Bebernes and D. Eberly, Mathematical Problems from Combustion Theory, Springer, New York (1989). [ 19] H. Berestycki, Qualitative properties of semilinear elliptic equations in unbounded domains, Progress in Elliptic and Parabolic Partial Differential Equations (Capri, 1994), Longman, Harlow (1996), 19-42. [20] H. Berestycki and L. Nirenberg, On the method of moving planes and the sliding method, Bol. Soc. Brasil. Mat. (N.S.) 22 (1) (1991), 1-37. [21] H. Berestycki, L. Nirenberg and S.R.S. Varadhan, The principal eigenvalue and maximum principle for second-order elliptic operators in general domains, Comm. Pure Appl. Math. 47 (1) (1994), 47-92. [22] S.R. Bernfeld, Y.Y. Hu and E Vuillermot, Large-time asymptotic equivalence for a class ofnonautonomous semilinear parabolic equations, Bull. Sci. Math. 122 (1998), 337-368. [23] G. Besson, On the multiplici~ of the eigenvalues of the Laplacian, Geometry and Analysis on Manifolds (Katata/Kyoto, 1987), Springer, Berlin (1988), 32-53. [24] I.U. Bronstein and A.Ya. KopanskiL Smooth Invariant Manifolds and Normal Forms, World Scientific, River Edge, NJ (1994). [25] P. Brunovsk~, The attractor of the scalar reaction diffusion equation is a smooth graph, J. Dynamics Differential Equations 2 (3) (1990), 293-323. [26] P. Brunovsk~ and B. Fiedler, Connecting orbits in scalar reaction diffusion equations. II. The complete solution, J. Differential Equations 81 ( 1) (1989), 106-135. [27] E Brunovsk~, X. Mora, P. Pol~6ik and J. Sol~-Morales, Asymptotic behavior of solutions of semilinear elliptic equations on an unbounded strip, Acta Math. Univ. Comenian. (N.S.)60 (2) (1991), 163-183. [28] E Brunovsk~ and P. Pol~6ik, On the local structure ofw-limit sets ofmaps, Z. Angew. Math. Phys. 48 (6) (1997), 976-986. [29] P. Brunovsk~, P. Pol~ik and B. Sandstede, Convergence in general periodic parabolic equations in one space dimension, Nonlinear Analysis TMA 18 (1992), 209-215. [30] H.S. Carslaw and J.C. Jaeger, Conduction of Heat in Solids, Clarendon Press, Oxford (1959). [31] R.C. Casten and C.J. Holland, Instability results for reaction diffusion equations with Neumann boundary conditions, J. Differential Equations 27 (1978), 266-273. [32] G. Cerami, Symmetry breaking for a class of semilinear elliptic problems, J. Nonlinear Anal. TMA 10 (1986), 1-14. [33] M. Chen, X.-Y. Chen and J.K. Hale, Structural stabili~for time-periodic one-dimensional parabolic equations, J. Differential Equations 96 (1992), 355-418. [34] T.-F. Chen, H.A. Levine and P.E. Sacks, Analysis of a convective reaction-diffusion equation, Nonlinear Anal. 12 (12) (1988), 1349-1370. [35] X.-Y. Chen, Uniqueness of the w-limit point of solutions of a semilinear heat equation on the circle, Proc. Japan Acad. Ser. A Math. Sci. 62 (9) (1986), 335-337. [36] X.-Y. Chen, A strong unique continuation theorem for parabolic equations, Math. Ann. 311 (4) (1998), 603-630. [37] X.-Y. Chen and H. Matano, Convergence, asymptotic periodici~, and finite-point blow-up in onedimensional semilinear heat equations, J. Differential Equations 78 (1) (1989), 160-190. [38] X.-Y. Chen, H. Matano and L. V6ron, Anisotropic singularities of solutions of nonlinear elliptic equations in R 2, J. Funct. Anal. 83 (1) (1989), 50-97. [39] X.-Y. Chen and E Pol~6ik, Gradient-like structure and Morse decompositions for time-periodic onedimensional parabolic equations, J. Dynamics Differential Equations 7 (1) (1995), 73-107. [40] X.-Y. Chen and P. Pol~ik, Asymptotic periodici~ of positive solutions of reaction diffusion equations on a ball, J. Reine Angew. Math. 472 (1996), 17-51.
878
P. Polgt(ik
[41] S.Y. Cheng, Eigenfunctions and nodal sets, Comment. Math. Helv. 51 (1) (1976), 43-55. [42] S.-N. Chow and K. Lu, lnvariant manifolds for flows in Banach spaces, J. Differential Equations 74 (2) (1988), 285-317. [43] S.-N. Chow, K. Lu and J. Mallet-Paret, Floquet theory for parabolic differential equations, J. Differential Equations 109 (1) (1994), 147-200. [44] S.-N. Chow, K. Lu and J. Mallet-Paret, Floquet bundles for scalar parabolic equations, Arch. Rational Mech. Anal. 129 (3) (1995), 245-304. [45] C. Conley, Isolated Invariant Sets and the Morse Index, CBMS Regional Conf. Ser. Math., Vol. 38, Amer. Math. Soc., Providence, RI (1978). [46] E.N. Dancer, On nonradially symmetric bifurcation, J. London Math. Soc. 20 (2) (1979), 287-292. [47] E.N. Dancer, On the existence of two-dimensional invariant tori for scalar parabolic equations with time periodic coefficients, Ann. Scuola Norm. Sup. Pisa C1. Sci. (4) 18 (3) (1991), 455-471. [48] E.N. Dancer, Some notes on the method of moving planes, Bull. Austral. Math. Soc. 46 (3) (1992), 425434. [49] E.N. Dancer and E Hess, Stable subharmonic solutions in periodic reaction-~iffusion equations, J. Differential Equations 108 (1) (1994), 190-200. [50] E.N. Dancer and P. Hess, The symmetry of positive solutions of periodic-parabolic problems, J. Comput. Appl. Math. 52 (1-3) (1994), 81-89. [51] E.N. Dancer and P. Pol~ik, Realization of vector fields and dynamics of spatially homogeneous parabolic equations, Mem. Amer. Math. Soc. 668 (1999), 1-82. [52] D. Daners and E Koch Medina, Abstract Evolution Equations, Periodic Problems and Applications, Longman, Harlow (1992). [53] D. Daners and S. Merino, Gradient-like parabolic semiflows on BUC(RN), Proc. Royal Soc. Edinburgh Sect. A 128 (1998), 1281-1291. [54] K. Deimling, Nonlinear Functional Analysis, Springer, Berlin (1985). [55] J. Dockery, V. Hutson, K. Mischaikow and M. Pernarowski, The evolution of slow dispersal rates: a reaction-diffusion model, J. Math. Biol. 37 (1) (1998), 61-83. [56] T. Faria and L. Magalh~es, Realisation of ordinary differential equations by retarded functional differential equations in neighborhoods of equilibrium points, Proc. Royal Soc. Edinburgh Sect. A 125 (1995), 759770. [57] E. Fa~angovfi, Asymptotic analysis for a nonlinear parabolic equation on R, Preprint. [58] E. Feireisl, Convergence to an equilibrium for semilinear wave equations on unbounded intervals, Dynam. Systems Appl. 3 (3) (1994), 423-434. [59] E. Feireisl, On the long time behavior of solutions to nonlinear diffusion equations on R N, Nonlinear Differential Equations Appl. 4 (1) (1997), 43-60. [60] E. Feireisl and H. Petzeltov~, Convergence to a ground state as a threshold phenomenon in nonlinear parabolic equations, Differential Integral Equations 10 (1997), 181-196. [61] E. Feireisl and P. Pol~6ik, Structure of periodic solutions and asymptotic behavior for time-periodic reaction-diffusion equations on R, Adv. Differential Equations 5 (2000), 583-622. [62] E. Feireisl and E Simondon, Convergence for degenerate parabolic equations, J. Differential Equations 152 (2) (1999), 439-466. [63] E. Feireisl and E Simondon, Convergence for degenerate parabolic equations in one dimension, C. R. Acad. Sci. Paris S6r. I Math. 323 (3) (1996), 251-255. [64] N. Fenichel, Persistence and smoothness for invariant manifolds offlows, Indiana Univ. Math. J. 21 (1971), 193-226. [65] B. Fiedler, Discrete Lyapunovfunctionals and w-limit sets, Math. Mod. Num. Anal. 23 (1989), 415-431. [66] B. Fiedler, Global attractors of one-dimensional parabolic equations: sixteen examples, Tatra Mt. Math. Publ. 4 (1994), 67-92; Equadiff 8 (Bratislava, 1993). [67] B. Fiedler and J. Mallet-Paret, A Poincar~-Bendixson theorem for scalar reaction diffusion equations, Arch. Rational Mech. Anal. 107 (4) (1989), 325-345. [68] B. Fiedler and P. Pol~6ik, Complicated dynamics of scalar reaction diffusion equations with a nonlocal term, Proc. Roy. Soc. Edinburgh Sect. A 115 (1-2) (1990), 167-192. [69] B. Fiedler and C. Rocha, Orbit equivalence of global attractors of semilinear parabolic differential equations, Trans. Amer. Math. Soc. 352 (2000), 257-284.
Parabolic equations
879
[70] B. Fiedler and C. Rocha, Heteroclinic orbits of semilinear parabolic equations, J. Differential Equations 125 (1) (1996), 239-281. [71] B. Fiedler and B. Sandstede, Dynamics of periodically forced parabolic equations on the circle, Ergodic Theory Dynamical Systems 12 (3) (1992), 559-571. [72] E Fife, Mathematical Aspects of Reacting and Diffusing Systems, Springer, Heidelberg (1979). [73] M. Fila and P. Pol~ik, Global solutions ofa semilinear parabolic equation, Adv. Differential Equations 4 (1999), 163-196. [74] P. Freitas, Bifurcation and stability of stationary solutions of nonlocal scalar reaction diffusion equations, J. Dynamics Differential Equations 6 (1994), 613-630. [75] A. Friedman, Partial Differential Equations of Parabolic Type, Prentice-Hall, Englewood Cliffs, NJ (1964). [76] A. Friedman, Partial Differential Equations, original edn., Krieger, Huntington, NY (1976). [77] G. Fusco and W.M. Oliva, Transversalitv between invariant manifolds of periodic orbits for a class of monotone dynamical systems, J. Dynamics Differential Equations 2 (1) (1990), 1-17. [78] G. Fusco and C. Rocha, A permutation related to the dynamics of a scalar parabolic PDE, J. Differential Equations 91 (1) (1991), 111-137. [79] G. Fusco and S.M. Verduyn-Lunel, Order structures and the heat equation, J. Differential Equations 139 (1) (1997), 104-145. [80] V. Galaktionov and J.L. V~izquez, Continuation of blow-up solutions of nonlinear heat equations in several space dimensions, Comm. Pure Appl. Math. 50 (1997), 1-67. [81] B. Gidas, W.M. Ni and L. Nirenberg, Symmet 9 and related properties via the maxinzum principle, Comm. Math. Phys. 68 (3) (1979), 209-243. [82] B. Gidas, W.M. Ni and L. Nirenberg, Symmet 9 of positive solutions of nonlinear elliptic equations in R n , Mathematical Analysis and Applications, Part A, Academic Press, New York (1981), 369-402. [83] J. Guckenheimer and P. Holmes, Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields, Springer, New York (1981). [84] J.K. Hale, Flows on centre manifolds for scalar functional differential equations, Proc. Roy. Soc. Edinburgh Sect. A 101 (1985), 193-201. [85] J.K. Hale, Local flows for functional differential equations, Contemp. Math. 56 (1986), 185-192. [86] J.K. Hale, Asymptotic Behavior of Dissipative Systems, Amer. Math. Soc., Providence, RI (1988). [87] J.K. Hale, Dynamics of a scalar parabolic equation, Canad. Appl. Math. Quart. 5 (3) (1997), 209-305. [88] J.K. Hale and E Massatt, Asymptotic behavior in gradient-like systems, Dynamical Systems II, A.R. Bednarek and L. Cesari, eds, Academic Press, New York (1982), 85-101. [89] J.K. Hale and G. Raugel, Convergence in gradient-like systems with applications to PDE, J. Appl. Math. Phys. (ZAMP) 43 (1992), 63-124. [90] J.K. Hale and G. Raugel, Reaction-diffusion equations on thin domains, J. Math. Pures Appl. 71 (1992), 33-95. [91] J.K. Hale and G. Raugel, Attractors and Convergence of PDE on Thin L-Shaped Donzains, Progress in Partial Differential Equations, The Metz Surveys, Vol. 2, Longman, Harlow (1993). [92] A. Haraux and M.A. Jendoubi, Convergence of solutions of second-order gradient-like systems with analytic nonlinearities, J. Differential Equations 144 (2) (1998), 313-320. [93] A. Haraux and P. Pol~i~ik, Convergence to a positive equilibrium for some nonlinear evolution equations in a ball, Acta Math. Univ. Comenian. (N.S.)61 (2) (1992), 129-141. [94] D. Henry, Geometric Theor3' of Semilinear Parabolic Equations, Springer, New York (1981). [95] D. Henry, Some infinite-dimensional Morse-Smale systems defined by parabolic partial differential equations, J. Differential Equations 59 (1985), 165-205. [96] E Hess, Spatial homogenei~ of stable solutions of some periodic-parabolic problems with Neumann boundary' conditions, J. Differential Equations 68 (3) (1987), 320-331. [97] E Hess, Periodic-Parabolic Boundary Value Problems and Positivi~, Longman, Harlow (1991). [98] E Hess and E Pol~i6ik, Boundedness of prime periods of stable cycles and convergence to fixed points in discrete monotone dynamical systems, SIAM J. Math. Anal. 24 (5) (1993), 1312-1330. [99] P. Hess and E Pol~i6ik, Symmeto' and convergence properties for non-negative solutions of nonautonomous reaction-diffusion problems, Proc. Roy. Soc. Edinburgh Sect. A 124 (3) (1994), 573-587.
880
P Pold(ik
[100] M.W. Hirsch, Differential equations and convergence almost everywhere in strongly monotone semiflows, Nonlinear Partial Differential Equations (Durham, NH, 1982), Amer. Math. Soc., Providence, RI (1983), 267-285. [ 101] M.W. Hirsch, The dynamical systems approach to differential equations, Bull. Amer. Math. Soc. (N.S.) 11 (1) (1984), 1-64. [ 102] M.W. Hirsch, Stability and convergence in strongly monotone dynamical systems, J. Reine Angew. Math. 383 (1988), 1-53. [103] M.W. Hirsch, C.C. Pugh and M. Shub, Invariant Manifolds, Springer, New York (1976). [104] M. Hoffmann-Ostenhof and T. Hoffmann-Ostenhof, Bounds on the order of vanishing of eigenfunctions of Schr6dinger operators, Rigorous Results in Quantum Dynamics (Liblice, 1990), World Scientific, River Edge, NJ ( 1991), 37-40. [105] M. Hurley, Chain recurrence, semiflows, and gradients, J. Dynamics Differential Equations 7 (3) (1995), 437-456. [ 106] M.A. Jendoubi, Convergence of global and bounded solutions of the wave equation with linear dissipation and analytic nonlinearity, J. Differential Equations 144 (1998), 302-312. [107] J.-E Jiang, Attractors for strongly monotone fows, J. Math. Anal. Appl. 162 (1991), 210-222. [ 108] J.-E Jiang and S.-X. Yu, Stable cycles for attractors ofstrongly monotone discrete-time dynamical systems, J. Math. Anal. Appl. 202 (1996), 349-362. [ 109] M.S. Jolly, Explicit construction of an inertial manifold for a reaction diffusion equation, J. Differential Equations 78 (1989), 220-261. [ 110] T. Kato, Perturbation Theory for Linear Operators, Springer, Berlin (1966). [ 111 ] B. Kawohl, Symmetry or not?, Math. Intelligencer 20 (2) (1998), 16-22. [ 112] H. Koch, Finite dimensional aspects ofsemilinear parabolic equations, J. Dynamics Differential Equations 8 (1996), 177-202. [113] M.A. Krasnoselskii, Positive Solutions of Operator Equations, Noordhoff, Groningen (1964). [114] M.G. Krein and M.A. Rutman, Linear operators having invariant cone in a Banach space, Uspekhi Mat. Nauk 3, 3-95, Amer. Math. Soc. Transl., Vol. 26 (1950). [ 115] H.A. Levine, L.E. Payne, EE. Sacks and B. Straughan, Analysis of a convective reaction-diffusion equation. II, SIAM J. Math. Anal. 20 (1) (1989), 133-147. [ 116] C. Li, Monotonicity and symmet~ of solutions of fully nonlinear elliptic equations on bounded domains, Comm. Partial Differential Equations 16 (2-3) (1991), 491-526. [117] EL. Lions, Structure of the set of stea@-state solutions and asymptotic behaviour of semilinear heat equations, J. Differential Equations 53 (1984), 362-386. [ 118] O. Lopes, Radial and nonradial minimizers for some radially symmetric functionals, Electron. J. Differential Equations (1996), No. 03 (electronic, approx. 14 pp.). [119] O. Lopes, Radial symmetry of minimizers for some translation and rotation invariant functionals, J. Differential Equations 124 (2) (1996), 378-388. [ 120] K. Lu, Structural stability for time periodic parabolic equations, Differential Equations and Applications (Hangzhou, 1996), Internat. Press, Cambridge, MA, 207-214. [121] K. Lu, Structural stability for scalar parabolic equations, J. Differential Equations 114 (1) (1994), 253271. [122] A. Lunardi, Analytic Semigroups and Optimal Regularity in Parabolic Problems, Birkh~user, Berlin (1995). [123] J. Mallet-Paret and G.R. Sell, The Poincar~-Bendixson theorem for monotone cyclic feedback systems with delay, J. Differential Equations 125 (2) (1996), 441-489. [124] J. Mallet-Paret and G.R. Sell, Systems of differential delay equations: Floquet multipliers and discrete Lyapunov functions, J. Differential Equations 125 (2) (1996), 385-440. [ 125] J. Mallet-Paret and H.L. Smith, The Poincar~-Bendixson theorem for monotone cyclic feedback systems, J. Dynamics Differential Equations 2 (4) (1990), 367-421. [ 126] R. Marl6, Ergodic Theory and Differentiable Dynamics, Springer, Berlin (1987); Translated from the Portuguese by Silvio Levy. [ 127] R.H. Martin and H.L. Smith, Reaction-diffusion systems with time delays monotonicity, invariance, comparison and convergence, J. Reine Angew. Math. 413 (1991), 1-35.
Parabolic equations
881
[128] P. Massatt, The convergence of solutions of scalar parabolic equations with convection to periodic solutions, Preprint. [129] H. Matano, Convergence of solutions of one-dimensional semilinear parabolic equations, J. Math. Kyoto Univ. 18 (1978), 221-227. [130] H. Matano, Asymptotic behavior and stabili~ of solutions of semilinear diffusion equations, Publ. Res. Inst. Math. Sci. 15 (1979), 401-458. [131] H. Matano, Nonincrease of the lap-number of a solution for a one-dimensional semilinear parabolic equation, J. Fac. Sci. Univ. Tokyo Sect. IA Math. 29 (2) (1982), 401-441. [132] H. Matano, Existence of nontrivial unstable sets for equilibriums of strongly order-preserving systems, J. Fac. Sci. Univ. Tokyo Sect. IA Math. 30 (3) (1984), 645-673. [133] H. Matano, Strongly order-preserving local semidynamical systems - theory and applications, Semigroups, Theory and Applications, Vol. I (Trieste, 1984), Longman, Harlow (1986), 178-185. [134] H. Matano, Strong comparison principle in nonlinear parabolic" equations, Nonlinear Parabolic Equations Qualitative Properties of Solutions (Rome, 1985), Longman, Harlow (1987), 148-155. [135] H. Matano, Asymptotic behavior of solutions of semilinear heat equations on S I , Nonlinear Diffusion Equations and Their Equilibrium States, II (Berkeley, CA, 1986), Springer, New York (1988), 139-162. [136] H. Matano and T. Ogiwara, Stability' analysis in order-preserving systems in the presence of symmeto', Proc. Royal Soc. Edinburgh 129 (1999), 395-438. [ 137] H. Matano and T. Ogiwara, Monotonicity and convergence in order-preserving systems, Discrete Contin. Dynam. Systems 5 (1999), 1-34. [ 138] A. Mielke, Essential manifolds for an elliptic problem in infinite strip, J. Differential Equations 110 (1994), 322-355. [139] J. Mierczyfiski, Flows on order bundles (unpublished). [ 140] J. Mierczyfiski, On monotone trajectories, Proc. Amer. Math. Soc. 113 (2) (1991), 537-544. [141] J. Mierczyfiski, P-arcs in strongly monotone discrete-time dynamical systems, Differential Integral Equations 7 (5-6)(1994), 1473-1494. [142] J. Mierczyfiski, Globally positive solutions of linear parabolic PDEs of second order with Robin boundary' conditions, J. Math. Anal. Appl. 209 (1) (1997), 47-59. [143] J. Mierczyfiski, Globally positive solutions of linear parabolic partial differential equations of second order with Dirichlet boundao' conditions, J. Math. Anal. Appl. 226 (2) (1998), 326-347. [144] J. Mierczyfiski, On smoothness ofcaro'ing simplices, Proc. Amer. Math. Soc. 127 (2) (1999), 543-551. [145] J. Mierczyfiski and E Polfi6ik, Group actions on strongly monotone dynamical systems, Math. Ann. 283 (1) (1989), 1-11. [146] J.D. Murray, Mathematical Biology, 2nd edn., Springer, Berlin (1993). [147] N.S. Nadirashvili, Uniformly monotone dynamical systems, Proc. Roy. Soc. Edinburgh Sect. A 123 (1) (1993), 59-74. [148] G. Namah and J.-M. Roquejoffre, Convergence to periodic fronts in a class of semilinear parabolic equations, Nonlinear Differential Equations Appl. 4 (4) (1997), 521-536. [149] K. Nickel, Gestaltaussagen iiber L6sungen parabolische Differentialgleichungen, J. Reine Angew. Math. 211 (1962), 78-94. [150] A. Okubo, Diffilsion and Ecological Problems: Mathematical Models, Springer, Berlin (1980). [151] J. Palis and W. de Melo, Geometric Theo~ of Dynamical Systems, Springer, New York (1982). [152] K. Palmer, Exponential dichotomies and transversal homoclinic points, J. Differential Equations 55 (1984), 225-256. [153] A. Pazy, Semigroups of Linear Operators and Applications to Partial Differential Equations, Springer, New York (1983). [154] E Polfi6ik, Convergence in smooth strongly monotone flows defined by semilinear parabolic equations, J. Differential Equations 79 (1) (1989), 89-110. [155] P. Polfi6ik, Domains of attraction of equilibria and monotonici~' properties of convergent trajectories in parabolic systems admitting strong comparison principle, J. Reine Angew. Math. 400 (1989), 32-56. [156] E Pol~ik, Generic properties of strongly monotone semiflows defined by ordinary, and parabolic differential equations, Qualitative Theory of Differential Equations (Szeged, 1988), North-Holland, Amsterdam (1990), 519-530.
882
P. Pold(ik
[ 157] E Polfi6ik, Imbedding of any vector field in a scalar semilinear parabolic equation, Proc. Amer. Math. Soc. 115 (4) (1992), 1001-1008. [ 158] E Polfi~ik, Realization of the dynamics of ODEs in scalar parabolic PDEs, Tatra Mt. Math. Publ. 4 (1994), 179-185; Equadiff 8 (Bratislava, 1993). [ 159] E Polfi6ik, High-dimensional co-limit sets and chaos in scalar parabolic equations, J. Differential Equations 119 (1) (1995), 24-53. [ 160] E Polfi6ik, Reaction-diffusion equations and realization of gradient vector fields, International Conference on Differential Equations (Lisboa, 1995), World Scientific, River Edge, NJ (1998), 197-206. [161] E Polfi6ik and K. Rybakowski, Imbedding vector fields in scalar parabolic Dirichlet BVPs, Ann. Scuola Norm. Sup. Pisa C1. Sci. 22 (4) (1995), 737-749. [ 162] E Polfi6ik and K.E Rybakowski, Nonconvergent bounded trajectories in semilinear heat equations, J. Differential Equations 124 (2) (1996), 472-494. [163] E Polfi6ik and V. So~ovi6ka, Stable periodic solutions of a spatially homogeneous nonlocal reactiondiffusion equation, Proc. Roy. Soc. Edinburgh Sect. A 126 (4) (1996), 867-884. [ 164] E Polfi6ik and I. Tere~6Lk, Convergence to cycles as a typical asymptotic behavior in smooth strongly monotone discrete-time dynamical systems, Arch. Rational Mech. Anal. 116 (4) (1992), 339-360. [ 165] E Polfi~ik and I. Tere~&ik, Exponential separation and invariant bundles for maps in ordered Banach spaces with applications to parabolic equations, J. Dynamics Differential Equations 5 (2) (1993), 279303. [ 166] E Polfi6ik and E. Yanagida, Existence of stable subharmonic solutions for reaction-diffusion equations, J. Differential Equations 169 (2001), 255-280. [ 167] M. Prizzi, Complex dynamics in semilinear parabolic equations, Ph.D. thesis, ISAS, Trieste (1997). [168] M. Prizzi and K.E Rybakowski, Complicated dynamics of parabolic equations with simple gradient dependence, Trans. Amer. Math. Soc. 350 (8) (1998), 3119-3130. [169] M. Prizzi and K.E Rybakowski, Inverse problems and chaotic dynamics of parabolic equations on arbitrary spatial domains, J. Differential Equations 142 (1)(1998), 17-53. [170] M.H. Protter and H.E Weinberger, Maximum Principles in Differential Equations, Prentice-Hall, New York (1967). [ 171] G. Raugel, Dynamics ofpartial differential equations on thin domains, Dynamical Systems (Montecatini Terme, 1994), Springer, Berlin (1995), 208-315. [172] C. Robinson, Dynamical Systems, CRC Press, Boca Raton, FL (1995). [ 173] C. Rocha, Properties of the attractor of a scalar parabolic PDE, J. Dynamics Differential Equations 3 (4) (1991), 575-591. [174] J.-M. Roquejoffre, Convergence to traveling waves for solutions of a class of semilinear parabolic equations, J. Differential Equations 108 (2) (1994), 262-295. [ 175] J.-M. Roquejoffre, Eventual monotonicity and convergence to traveling fronts for the solutions ofparabolic equations in cylinders, Ann. Inst. H. Poincar6 Anal. Non Lin6aire 14 (4) (1997), 499-552. [ 176] D. Ruelle, Analycity properties of the characteristic exponents of random matrix products, Adv. in Math. 32 (1) (1979), 68-80. [ 177] K.E Rybakowski, An abstract approach to smoothness ofinvariant manifolds, Appl. Anal. 49 (1-2) (1993), 119-150. [178] K.E Rybakowski, Realization of arbitrary vector fields on center manifolds of parabolic Dirichlet BVPs, J. Differential Equations 114 (1) (1994), 199-221. [179] K.E Rybakowski, Realization of arbitrary vector fields on invariant manifolds of delay equations, J. Differential Equations 114 (1) (1994), 222-231. [ 180] K.E Rybakowski, The center manifold technique and complex dynamics ofparabolic equations, Topological Methods in Differential Equations and Inclusions (Montreal, PQ, 1994), Kluwer Academic, Dordrecht (1995), 411-446. [181] B. Sandstede, Asymptotic behavior of solutions of nonautonomous scalar reaction-diffusion equations, International Conference on Differential Equations, Vols. 1, 2 (Barcelona, 1991), World Scientific, River Edge, NJ (1993), 888-892. [ 182] J. Serrin, A symmetry problem in potential theory, Arch. Rational Mech. Anal. 43 (1971), 304-318. [ 183] W. Shen and Y. Yi, Almost automorphic and almost periodic dynamics in skew-product semiflows, Mem. Amer. Math. Soc. 647 (1998), 1-93.
Parabolic equations
883
[ 184] L. Simon, Asymptotics for a class of nonlinear evolution equations, with applications to geometric problems, Ann. of Math. 118 (1983), 525-571. [185] H.L. Smith, lnvariant curves for mappings, SIAM J. Math. Anal. 17 (5) (1986), 1053-1067. [ 186] H.L. Smith, Monotone Dynamical Systems, Amer. Math. Soc., Providence, RI (1995). [ 187] H.L. Smith and H.R. Thieme, Quasi convergence and stabili~' for strongly order-preserving semiflows, SIAM J. Math. Anal. 21 (3) (1990), 673-692. [ 188] H.L. Smith and H.R. Thieme, Convergence for strongly order-preserving semiflows, SIAM J. Math. Anal. 22 (4) (1991), 1081-1101. [ 189] J. Smoller, Shock Waves and Reaction-Diffusion Equations, Springer, Berlin (1967). [ 190] J. Smoller and A. Wasserman, Symmet~-breaking for positive solutions of semilinear elliptic equations, Arch. Rat. Mech. Anal. 95 (1986), 217-225. [191] E Tak~i6, Convergence to equilibrium on invariant d-hypersurfaces for strongly increasing discrete-time semigroups, J. Math. Anal. Appl. 148 (1) (1990), 223-244. [192] P. Tak~i6, Asymptotic behavior of strongly monotone time-periodic dynamical processes with symmetry, J. Differential Equations 100 (2) (1992), 355-378. [193] E Tak~i6, Domains of attraction of generic w-limit sets for strongly monotone discrete-time semigroups, J. Reine Angew. Math. 423 (1992), 101-173. [194] P. Tak~i~, Linearly stable subharmonic orbits in strongly monotone time-periodic dynamical systems, Proc. Amer. Math. Soc. 115 (3) (1992), 691-698. [195] E Tak~i6, A construction of stable subharmonic orbits in monotone time-periodic dynamical systems, Monatsh. Math. 115 (3) (1993), 215-244. [196] E Tak(16, A short elementary proof of the Kre~n-Rutman theorem, Houston J. Math. 20 (1) (1994), 93-98. [197] I. Tere~6Lk, Dynamics of C 1 smooth strongly monotone discrete-time dynamical systems, Preprint. [198] I. Tereg6~ik, Dynamical systems with discrete Lyapunov functionals, Ph.D. thesis, Comenius University (1994). [199] W.C. Troy, Symmetr3' properties in systems of semilinear elliptic equations, J. Differential Equations 42 (3) (1981), 400--413. [200] S.A. Vakulenko, Existence of Ruelle-Takens transition to chaos for some evolution equations, C. R. Acad. Sci. Paris 316 (1993), 1015-1018. [201] S.A. Vakulenko, Reaction-diffusion systems with prescribed large time behavior, Ann. Inst. Henri Poincar6 66 (1997), 373-410. [202] S.A. Vakulenko, Dissipative systems with controllable inertial forms, Preprint. [203] A. Vanderbauwhede, Symmetry-breaking at positive solutions, Z. Angew. Math. Phys. 38 (2) (1987), 315326. [204] A. Vanderbauwhede, Centre manifolds, normal forms and elementary, bifurcations, Dynamics Reported, Vol. 2, Wiley, Chichester (1989), 89-169. [205] A. Vanderbauwhede and G. Iooss, Center manifold theory, in infinite dimensions, Dynamics Reported: Expositions in Dynamical Systems, Springer, Berlin (1992), 125-163. [206] M.P. Vishnevskii, Stabilization of solutions of weakly coupled cooperative parabolic systems, Mat. Sb. 183 (1992), 45-62. [207] M.P. Vishnevskii, Monotone solutions ofquasilinear parabolic equations, Sibirsk. Mat. Zh. 34 (4) (1993), 50-60, ii, viii. [208] E Vuillermot, Almost-periodic attractors for a class of nonautonomous reaction-diffusion equations on R n, III: Center curves and Lyapunov stabili~, Nonlinear Anal. 22 (5) (1994), 533-559. [209] S. Wiggins, Global Bifurcations and Chaos, Springer, New York (1988). [210] S. Wiggins, Normally Hyperbolic Invariant Manifolds in Dynamical Systems, Springer, New York (1994). [211] J. Wu, Theory and Applications of Partial Functional-Differential Equations, Springer, New York (1996). [212] T.I. Zelenyak, Stabilization of solutions of boundary value problems for a second order parabolic equation with one space variable, Differential Equations (transl. from Differencialnye Uravnenia) 4 (1968), 17-22. [213] T.I. Zelenyak, M.M. Lavrentiev and M.P. Vishnevskii, Qualitative Theory of Parabolic Equations, Part 1, VSP (1997).
This Page Intentionally Left Blank
CHAPTER
17
Global Attractors in Partial Differential Equations G.
Raugel
CNRS et Universitd de Paris-Sud, Analyse Numdrique et EDP, UMR 8628, B6timent 425, F-91405 Orsay cedex, France E-mail: genevieve, raugel@math, u-psud.fr
Contents 1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
887
2. F u n d a m e n t a l concepts
.............................................
889
2.1. S o m e definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2. co and or-limit sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
891 893
2.3. Global attractors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
898
2.4. E x a m p l e s of asymptotically s m o o t h semigroups
907
2.5. M i n i m a l global B-attractors
............................
.......................................
912
2.6. Periodic systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
913
3. General properties of global attractors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
915
3.1. D e p e n d e n c e on parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
915
3.2. D i m e n s i o n of c o m p a c t global attractors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
923
3.3. Regularity of the flow on the attractor and d e t e r m i n i n g m o d e s
927
3.4. Inertial manifolds
....................
.............................................
4. Gradient systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1. General properties of gradient systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2. Retarded functional differential equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3. Scalar parabolic equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.4. O n e - d i m e n s i o n a l scalar parabolic equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.5. A d a m p e d hyperbolic equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
934 936 936 945 948 952 958
5. Further topics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
970
Acknowledgements
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
974
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
974
References
H A N D B O O K O F D Y N A M I C A L S Y S T E M S , VOL. 2 Edited by B. Fiedler 9 2002 Elsevier Science B.V. All rights reserved 885
This Page Intentionally Left Blank
Global attractors in partial differential equations
887
1. Introduction This survey is devoted to an introduction to the theory of global attractors for semigroups defined on infinite dimensional spaces, which has mainly been developed in the last three decades. A first purpose here is to describe the main ingredients leading to the existence of a global attractor. Once a global attractor is obtained, the question arises if it has special regularity properties, a particular shape etc. or if it has a finite-dimensional character. The second objective is thus naturally to give some of the most important properties of global attractors. Finally, we want to show the relevance of the abstract theory in applications to evolutionary equations. Clearly, we can here neither describe all the related questions and results, nor give the detailed proofs of the main statements, although they are often very instructive. To keep the text elementary and self-contained, we have recalled all the needed basic concepts in the theory of dynamical systems and have included some proofs. In order to illustrate the general abstract results, we have chosen to discuss few equations, but in details, rather than to give a catalogue of applications to partial differential equations and functional differential equations. The dynamical systems that arise in physics, chemistry or biology, are often generated by a partial differential equation or a functional differential equation and thus the underlying state space is infinite-dimensional. Usually these systems are either conservative or exhibit some dissipation. In the last case, one can hope to reduce the study of the flow to a bounded (or even compact) attracting set or global attractor, that contains much of the relevant information about the flow and often has some finite-dimensional character. It is difficult to trace the origin of the concepts of dissipation and attractor. The word attractor, applied to a single invariant point, is ancient and probably appeared at the beginning of the century. One can find it, for example, in the book of Coddington and Levinson in 1955 [42] or in a paper of Mendelson in 1960 [156]. For a flow on a locally compact metric space, attractors consisting of more than one point have been studied by Auslander et al. in 1964 [6] (see the paper of [162] for various definitions in the finite-dimensional case). Several different notions of attractors are already found in the lecture notes of Bhatia and Hajek [20] in 1969, for a semi-flow on an infinite-dimensional space. In 1968, Gerstein and Krasnoselskii [78] studied the existence and properties of a maximal compact invariant set for the discrete system generated by a compact map S on a Banach space. In 1971, Billotti and LaSalle described the maximal compact invariant set and proved stability results for maps whose iterates were eventually compact. The specific notion of compact global attractor, as used in this review, appeared in the papers of Oliva in the early 1970s (see [103]). The work of Ladyzenskaya [133,134] in 1972 implied the existence of the compact global attractor for the semi-flow generated by the two-dimensional Navier-Stokes equations. In the same year 1972, Hale et al. [100] gave general existence results of maximal compact invariant sets and introduced the concept of asymptotically smooth systems. Let us now describe more precisely the concepts of dissipation and global attractor. In his study of the forced van der Pol equation, Levinson [144] introduced the concept point dissipative for maps S on the space R '7. A map S is point dissipative if there exists a bounded set B0 C R" such that, for each x ~ R", there exists an integer no(x, Bo) so that S"(x) ~ Bo, for n >/no. Due to the local compactness of R",
888
G. Raugel
any point dissipative map S is also bounded dissipative (or equivalently uniformly ultimately bounded); that is, there exists a bounded set Bo C R n such that, for each bounded set B C 1R'7, there exists an integer no(B, Bo) so that S n (B) C B0, for n ~> no. If S is bounded dissipative, the local compactness of R 'l also implies that the co-limit set co(B) = f"]m>~OC I ( U j - I SJ(B)) of any bounded set B is compact, invariant (i.e., S(B) = B) and attracts B, that is, 6•,,(S"(B),CO(B)) --+ 0 as n --+ +oc, where 6R,,(Sn(B),CO(B)) = SUPxes,,(8)inf~,e~o(8) Ilx - yIIR,,. Therefore, if S is point dissipative, A = co(B0) is the global attractor, that is, A is bounded, invariant and attracts every bounded set B of N n. Here, in addition, A is compact. Thus, in finite dimensions, point dissipativness implies the existence of a compact global attractor. Note that this definition of the global attractor implies that A is maximal with respect to inclusion and hence is unique. Unfortunately, when the underlying space X is not locally compact, there are examples where point dissipativness does not imply that the orbits of bounded sets are bounded and where bounded dissipativness does not imply the existence of a global attractor. So the following question arises: are there interesting classes of dynamical systems on non locally compact spaces that have properties similar to the ones mentioned above for dynamical systems on R"? To have a theory comparable to the one for maps on R", one must impose a type of smoothing property on the operator S : X ~ X. This is done by assuming, for example, that S : X ~ X or an iterate of S is compact (see [21]). More generally, it is sufficient to suppose that S is asymptotically smooth in the terminology of Hale et al. [ 100] or equivalently, asymptotically compact in the terminology of Ladyzhenskaya [ 137]. In Section 2, we recall all the needed precise definitions, introduce the above concepts of dissipativness and asymptotic smooth or compact systems. We discuss some implications between these notions. The fundamental theorem of existence of a compact global attractor is stated and proved. Some basic properties like invariance, stability and connectedness of compact global attractors are also discussed. Finally, a large part of the section contains examples of asymptotically smooth systems. Section 3 is devoted to a presentation of the most important properties of compact global attractors. Compact global attractors are robust objects with respect to perturbations. We give several continuity properties of the global attractors with respect to perturbation parameters and recall the stability of the flow on the global attractor under perturbations for Morse-Smale systems. The mentioned properties play an important role in the study of systems depending on several physical parameters and also in numerical approximations of these systems. Finally, we discuss the possibility of the flow on the compact global attractor A being finite-dimensional by first showing that, in most of the cases, A has finite Hausdorff or fractal dimension. The next question of interest is the reduction of the study of the flow on A to the discussion of the flow of some system on a finite-dimensional space. One effort in this direction is to assert the existence of an inertial manifold, that is a finite-dimensional Lipschitzian positively invariant manifold, that contains the global attractor. Unfortunately, the existence of inertial manifolds is rare in the general class of systems arising in applications. Another approach is to show the existence of a finite number of "modes", on which the corresponding dynamics approximates the dynamics of the original system on ,4 (for example, Galerkin approximations). For evolutionary equations, this approach gives regularity with respect to time of the flow on A and regularity in "the spatial variables" when PDE's are involved.
Global attractors in partial differential equations
889
So far, one has not yet given a description of the flow on the global attractor. In the general case, a qualitative description of the global attractor seems difficult. Section 4 is devoted to the class of gradient systems, that is systems which admit a Lyapunov functional. In this case, due to the invariance principle of LaSalle, the global attractor A, if it exists, is the unstable set of the set of equilibrium points. If the equilibrium points are all hyperbolic, then A is the union of the unstable manifolds of each equilibrium point. Applications of the general abstract theory, in the frame of gradient systems, are then given to FDE's and to two representative classes of scalar partial differential equations, the reaction-diffusion equations and the (weakly) damped wave equations. Special emphasis is made on the scalar reaction-diffusion equation defined on a bounded interval of and provided with separated boundary conditions. In this case, a result of Henry [ 123,3] says that the stable and unstable manifolds are always transversal, which means that the global dynamical behaviour can only change by bifurcations of the equilibria. This important property was the starting point for the precise qualitative description of the flow on the global attractor. In this one-dimensional case, special properties like the strong maximum principle, the Sturm-Liouville theory and the Jordan curve theorem play a primordial role. Finally, in Section 5, we illustrate the abstract theory of global attractors given in Section 2, by studying weakly damped dispersive equations, the prototype of which is the weakly damped Schr6dinger equation. Many topics have been left on the side, including the non autonomous evolutionary equations leading to the notions of processes and skew-product semi-flows (see [49,197,161, 118,204,34], etc.), the generalization of the concept of attractor to multivalued mappings (see [ 15] for instance), the notion of random attractors for dissipative stochastic dynamical systems (see [48,51] for basic properties). Only few applications to the class of retarded functional differential equations have been given below (see [116,174]). Finally, for further readings on global attractors and more examples, the reader should consult the books [ 13,94,202,140,35,198], for example.
2. Fundamental concepts In this section, (X, d) (or simply X) denotes a metric space, with distance d. We use the semi-distance 6x(., .) defined on the subsets of X by
6x(x, A) =- inf d(x, a),
VxEX, VACX,
aEA
8x(A,
B) --
sup inf
aEA bEB
d(a,
b) -
sup 6x(a, B),
aEA
VA, B C X .
For any subset A of X and any positive number e, we introduce the open neighbourhood N x ( A , e) = {z E X ] 3x(z, A) < e} (respectively the closed neighbourhood N x ( A , E) = {z ~ X ] 3x(z, A) ~0 on X, whose definition we now recall. DEFINITION 2.1. A continuous dynamical system or continuous semigroup on X is a oneparameter family of mappings S(t), t >~0, from X into X such that (1) S ( 0 ) = I; (2) S(t + s) = S(t)S(s) for any t, s/> 0; (3) for any t >1 O, S(t) E C~ X); (4) for any u E X, t ~ S(t)u ~ C~ +c~), X). If the mappings S(t) from X into X are defined for t E ~, if the properties (2), (3) hold for any t, s E R and if, in (4), (0, +cx~) can be replaced by ~, then S(t), t E 1t< is a continuous group. A one-parameter family of mappings S(t), t >~ O, satisfying only the properties (1), (2) and (3) will be simply called "a semigroup".
We recall that, if S E C~ X), the family S", n E 1~, is called a discrete dynamical system or discrete semigroup. If S is a C~ from X to X, then the family S m, m E Z, forms a discrete group. Most of the properties described below are also valid for discrete dynamical systems. In the sequel, if we do not want to distinguish between discrete dynamical systems and (non discrete) semigroups, we simply refer to a semigroup S or S(t), t E G +, where G + is either [0, +cx~) or the set of nonnegative integers N. Hereafter, G denotes either R or Z. The first example of continuous semigroups is given by ordinary differential equations k = f (x), x E •", where f : x E R" w-~ f ( x ) E It~'~ is a globally Lipschitzian mapping. Another basic example is the class of retarded functional differential equations (see [116]). Evolutionary partial differential equations also give rise to continuous semigroups as shown in the following model example. EXAMPLE 2.2. Let X, Y be two Banach spaces, such that Y C X, with continuous injection. Let r 0 ( t ) be a linear Co- semigroup in X with infinitesimal generator A and f : Y --+ X be a Lipschitzian mapping on the bounded sets of Y. We assume that, either, (1) Y = X ,
or
(2) S0(t) is an analytic semigroup on X and Y = X ~ = D((~. I d - A)~ where c~ E [0, 1) and ~. is an appropriate real number. We consider the semilinear differential equation in Y, du(t) dt
= Au(t) + f ( u ( t ) ) ,
t > O, u(O) -- uo E Y.
(2.1)
It is well known that this equation has a unique mild solution u E C~ T*(u0)), Y), where T* (u0) E (0, +cx~]. If T* (u0) = +cx~, for any u0 E Y, then the family of mappings S(t) defined by S(t)uo - u(t) is a continuous semigroup on Y. In particular, the mapping (uo, t) ~-+ S(t)uo is continuous from [0, +cx~) • Y into Y. We recall that u(t) is a mild solution of (2.1) if, for t ~> 0,
S(t)uo - r o ( t ) u o +
f0 t Zo(t
- s) f (S(s)uo) ds =- r o ( t ) u o + U(t)uo.
(2.2)
Global attractors in partial differential equations
891
Under the same hypotheses as above, assume now that there exists a subset Z0 of Y such that T* (u0) = + o c , for any u0 9 Z0, and that there is a positive constant Co such that
II s(,).o II Y
Co,
V.o
Zo, v,
o.
Ut)o {S(t)uO}r,
We thus introduce the set Z -- U,0ez0 equipped with the distance d induced by the norm of Y. Then, (Z, d) is a complete metric space, S(t)lz defines a continuous semigroup on Z and IIS(t)uollr ~ 0. REMARK. In the definition of continuous dynamical systems, several authors require also that, for any u E X, the mapping t E [0, + o o ) ~ S(t)u E X is continuous at t -- 0. Actually, this hypothesis is unnecessary most of the time. In Section 4 below (see Equation (4.69)), we study an example where S(t) is not continuous at t = 0. A result of [37] implies that, if S(t) is a continuous dynamical system in the sense of Definition 2.1, then the mapping (t, u) E (0, +oc) x X w-~ S(t)u E X is continuous. If, moreover, the space X is locally compact and if, for any u E X, t E [0, + o c ) ~ S(t)u E X is continuous at t = 0, then, by a theorem of [53], the mapping (t, u) E [0, +oc) x X ~ S(t)u E X is continuous. If the space X is not locally compact, the joint continuity of S(t)u at t = 0 may not be true (see the examples of [36,15]).
2.1. Some definitions In this subsection, we assume that S(t), t E G +, is a semigroup on X. Here we define carefully the notions of invariance and attraction, which play a crucial role in the theory of global attractors. DEFINITION 2.3. A set A is positively invariant if S(t)A C A, for any t e G +. The set A is invariant if S(t)A = A, for any t e G +. The following concept dealing with invariance and connectedness has been introduced in [141] and will be used later. DEFINITION. Let S be a semigroup of continuous maps from X into X. A closed invariant subset A of X is said to be invariantly connected if it cannot be represented as the union of two nonempty, disjoint, closed, positively invariant sets.
The positive orbit of x E X is the set g +(x) = { S ( t ) x l t E G+}. If E C X, the positive orbit of E is the set
•
-- U SU)E = U • (z). tcG+
z.eE
More generally, for r E G +, we define the orbit after the time r of E by
y+(E)--v+(S(r)E).
G. Raugel
892
Let now I be an interval of IR and S(t), t ~> 0, a semigroup. We recall that a mapping u from I into X is a trajectory (or orbit) of S(t) on I if u(t + s) = S(t)u(s), for any s 6 I and t ~> 0 such that t + s 6 I. In particular, if I = ( - ~ , 0] and u(0) = z 6 X, u is called a negative orbit through z and is often denoted by V-(z). If I = R and u(0) = z, then u is called a complete orbit through z and is often denoted by y(z). We let F - ( z ) be the set of all negative orbits through z. If F - ( z ) is not empty, it may contain more than one negative orbit, because we have not assumed the property of backward uniqueness. We also let F ( z ) = F - ( z ) U y+(z) be the set of all complete orbits through z. In the same way, we define the sets y - ( E ) , F - ( E ) and F ( E ) , for any subset E of X. For later use, for any z 6 X, we introduce the following set:
H(t, z) -- {y 6 X I there exists a negative orbit uz through z such that uz(O) -- z and U z ( - t ) -- y }. We remark that F - ( z ) = [.-Jt/>0 H (t, z). Likewise, if E C X, we define the set H (t, E) =
~ z c E H(t, z) and remark that F - ( E ) -- ~t>~o H(t, E). In a similar way, replacing ( - c o , 0] (respectively R) by (-cx~, 0] A Z (respectively Z), we define the negative and complete orbits of maps S. In the framework of maps, it is very easy to give examples of non backward uniqueness. Consider the non injective logistic map S:[0, 1] ~ [0, 1], Sx = )~x(1 - x), with 2 < ~. ~< 4. The point x0 = (,k - 1)/~. is a fixed point of S and the point y = ~ - l satisfies Sy = xo. The iterates S - n y ~ (0, x0) are well defined and y ( y ) = { S - n y I n = 0, 1,2 . . . . } U {x0} is a complete orbit trough x0. The proof of the following lemma is elementary. LEMMA 2.4. The set A C X is invariant for the semigroup S(t), t ~ G +, if and only if for any a ~ A, there exists a complete orbit Ua through a, with ua(G +) C A. If the semigroup S(t), t >~O, is continuous, the complete orbits belong all to C~ A). In general, there may exist an invariant set A, which does not contain all complete orbits of S through each point in A. In the above example of the logistic map, the invariant set A -- {x0} does not contain the complete orbit y ( y ) . PROPOSITION 2.5. Let S(t) be a continuous semigroup on X and A be a compact invariant set. If the operators S(t) are injective on A, for t ~ O, then S(t)la is a continuous group of continuous operators on A. PROOF. By Lemma 2.4, for any a E A, there exists a complete orbit Ua E C0(I~, A) such that S ( t ) U a ( - t ) - a, for any t ~> 0. Since S(t)IA is one-to-one, we can set, for a 6 A"
S ( - t ) a - S ( t ) - l a - Ua(-t).
Global attractors
893
in p a r t i a l d i f f e r e n t i a l e q u a t i o n s
Clearly, S ( t ) S ( s ) - S(t + s), for any t, s e IK. Moreover, for any t >~ 0, S ( t ) ' A --+ A is a continuous bijection on the compact set A, and therefore is an isomorphism from A to A. [2 Of primary importance in the theory of dynamical systems is the set ff -- {bounded complete orbits of S}. If this set J is bounded, then, by L e m m a 2.4, it is the maximal bounded invariant set that is; it is invariant, bounded and contains each bounded invariant set. If S has a global attractor A, then ./4 coincides with J . However, in the general case, ff needs not to be a global attractor, even if ,.7 is compact and attracts compact sets (see Example 2.24 below; examples involving continuous dynamical systems are also found in [98]).
2.2. co and a-limit sets As indicated in the introduction, we are going to construct global attractors as co-limit sets of bounded sets. For this reason, we now recall the definition and main properties of co and a-limit sets. DEFINITION 2.6. Let E be a nonempty subset of X. (i) We define the co-limit set co(E) of E as X
N
N ( U
seG +
scG +
.
t>/s. t e G +
(ii) We define the a-limit set a ( E ) of E as
N( U
seG +
X
H (t, E ) )
.
(2.4)
t>/s, t e G +
REMARK. Let z e X be such that there exists a negative orbit u= through z. We define the a,=-limit set at,= (z) of the orbit u= as X
(2.5)
scG +
An equivalent description of the co and a-limits sets is given in terms of limits of sequences as follows: LEMMA 2.7 (Characterization Lemma). Let E be a nonempty subset o f X. Then, I
co(E) -- I y ~ X ]there exist sequences t,, ~ G + and z,l ~ E such that Ik
t,~
> + o o and S(t,~)z,,
n --~ + o o
> y ~,
n ~ +oo
I
G. Raugel
894 [
~ ( E ) = I y E X I there exist sequences tn E G +, t,,
> +oc,
n --+ + o c
x,,
Xn E
> y where
n --+ + oc
X and
Zn E
E such that
x,, = Uz,, ( - t n )
and u z,, is a negative orbit through z,, 1. Likewise, if z is a point in X such that there exists a negative orbit u~ through z, then ~u: (z) -
[
I y E X I there exists a sequence t,, E G + such that t,7 and u z ( - t n )
> y].
tz ---+ - q - ~
> +oo
n--++oo
(2.6)
We remark that if E is a nonempty subset of X, we have the following inclusions, for t E G +,
co(E) -- co(S(t)E), S(t)co(E) C co(E),
~(E) C ~(S(t)E), S(t)ot(E) C or(E).
(2.7)
REMARK. If E is a nonempty subset of X, then, generally, co(E) :/: U:EE co(z). Indeed, let us consider the flow S(t) generated by the following ordinary differential equation
y= y(1-
y)(2 + y).
For any Yo E ]R, l i m , ~ + ~ S(t)yo exists and limt~+e~ S(t)yo = 1 if Yo > 0, S(t)O = 0 and l i m t ~ + ~ S(t)yo = - 2 if yo < 0. Thus, co(yo) = 1 if Y0 > 0, co(0) = 0 and co(Y0) = - 2 if yo < 0. However, for any t ~> 0, S ( t ) [ - 2 , 1] = [ - 2 , 1] and therefore co(E) = [ - 2 , 1]. EXAMPLE 2.8. The co-limit set can be empty as the following example, which appeared in the thesis of Cooperman [47] (see also [38]) shows. Let Ho be the Banach space of all real sequences x = {xi, i >>, 1 I xi --+ 0 as i ~ +oo}, equipped with the norm IlxllHo = sup//> ! Ixil. We introduce the map T : x = (x l, x2 . . . . ) E Ho w+ (1, x l, x2 . . . . ) E HO and define the map U : Ho --+ Ho by U(x) = x/IIx III-/o if IIx IIm > 1 and U(x) = x if IIx IIm ~< 1. Finally, we let S = T o U. We remark that, since S" = T" o U, for any x E Ho, the first n terms in the sequence S n (x) are equal to 1. Clearly, for any x0 E H0, the co-limit set of x0 is empty. Indeed, by the characterisation lemma, if co(x0) :/: 0, there exists y ~ H0 and a sequence nj E l~, nj ---+ -+-oo, such that S"J x0 --+ y. Since y E Ho, there exists i0 E N such that, for i >~ io, ]yi] ~ io, IIS"J (xo) - yll/40 ~> 1/2, which contradicts the convergence of sn~ xo towards y. Likewise, co(E) = 0 for any subset E of H0. Another obvious example is given by the flow generated on It~ by the ordinary differential equation ~ - 1. Thus, we can wonder when the co-limit sets are nonempty and which are their properties. DEFINITION. Let A, E be two (nonempty) subsets of X. The set A is said to attract E if
6x(S(t)E, A)
) O,
t -+ -t-oo
Global attractors in partial differential equations
895
that is, for any e > 0, there exists a time r -- r (e, A, E) >~ 0 such that S(t)E C Nx(A,E),
t~>r.
The following properties are elementary, yet fundamental. LEMMA 2.9. Let E be a nonempty subset o f X and S a semigroup on X. Assume that co(E) is nonempty, compact and attracts E, then the following properties hold: (1) co(E) is invariant. (2) If moreover E is connected, co(E) is invariantly connected. If in addition, either co(E) C E or S(t) is a continuous semigroup, then co(E) is connected. PROOF. Statement (1) as well as the connectedness of co(E) in the case of a continuous semigroup are well known and their proofs can be found, for instance, in [94, Chapters 2 and 3]. The connectedness of co(E) in the case where co(E) C E is shown in [86, Lemmas 4.1 and 4.2], for example. Here, adapting arguments given in [86], we prove Statement (2). (i) We begin by showing by contradiction, that, if co(E) is a nonempty, compact set, which attracts E, then co(E) is invariantly connected, if E is connected. To simplify the notation, we assume, without loss of generality, that S is a discrete dynamical system. If co(E) is not invariantly connected, then co(E) -- F1 U F2, where Fl, F2 are disjoint, nonempty, compact, positively invariant sets. We fix e > 0 so that N x (Fl, e) O N x (F2, e) -0. Since Fi and F2 are invariantly connected, the continuity of the mapping S implies that there exists 6, 0 < 6 < ~, such that S ( N x ( F i , 6)) C N x ( F i , e), for i -- 1,2. As co(E) attracts E, there exists no c l~l, such that,
S"E C Nx(co(E),~),
Vn >~no.
(2.8)
In particular,
S"~ C (Nx(FI,6) NS"~176
(2.9)
We note that, if x 6 E and S"~ ~ N x ( F i , 6), then S"~ E N x ( F i , e) N N x ( c o ( E ) , 6), which implies that S"O+lx ~ N x ( F i , 6 ) . Thus, by recursion, S"x ~ N x ( F i , 6 ) , for n ~> no. It follows that, if there exists j , j -- 1 or 2, such that N x (Fj, 6) N S ''~ E -- 13, then N x ( F j , 6) n S" E -- 13, for n ~> no, which means that Fj -- 13. Hence 9t'/~ ~ N x ( F i , 6) n S 'z0 E is nonempty, for i -- 1,2. Thus, we have just proved that the connected set S ''~ E is the union of the two nonempty, closed, disjoint subsets 5t-~ and ~ 0 , which is a contradiction. Therefore, co(E) is invariantly connected. (ii) To prove that co(E) is connected when E is connected and co(E) C E, we again argue by contradiction. If co(E) is not connected, then co(E) -- Fl U F2, where Fl, F2 are disjoint, nonempty, compact sets. We fix 0 < 6 ~< e so that N x ( F j , e) n N x ( F 2 , e) -- 0. As in (i), there exists no 6 1~1,such that the inclusions (2.8) and (2.9) hold. The property co(E) C E together with the invariance of co(E) yields that co(E) C S ''~ E. Thus, we deduce from (2.9) that Fi C N x (Fi, 6) N S "~ E, for i -- 1,2. Hence, the connected set S ''~ E is the union of the
896
G. Raugel
two nonempty, closed, disjoint subsets .T"~ and .T"~ which is a contradiction. Therefore, co(E) is connected. (iii) Finally, we prove by contradiction that co(E) is connected, when S(t) is a continuous semigroup. Arguing as in (ii), we show that there exists no 6 N, such that the inclusions (2.8), for any t >~ no, and (2.9) hold. To obtain a contradiction, we need to prove, as in (ii), that ~ 0 __ N x ( F i , 6 ) N S'~OE is nonempty for i -- 1,2. Since S(t) is a continuous semigroup and that Fl, F2 are compact sets, there exists a positive time r such that, for 0 ~< t ~< r, S ( t ) ( N x ( F i , 6)) C Nx(Fi, e), for i -- 1,2. Let x 6 E be such that S(no)x ~ N x ( F i , 6). Then, for 0 ~< t ~< r, S(no + t)x E Nx(co(E), 6) N Nx(Fi, e), which implies that, for0 ~< t ~< r, S ( n o + t ) x ~ N x ( F i , 6). Thus, by recursion, S(t)x ~ Nx(Fi, 6), for t ~> no. We now conclude like in (i) that ~/0 _ N x ( F i , 6 ) A ShOE is nonempty, for i - - 1,2. REMARKS 2.10. (i) We deduce from the above lemma that, if E is connected and if co(E) contains only fixed points of S, then co(E) is connected, which had been proved in [108, Lemma 2.7]. This result is useful when one wants to show, in the case of gradient systems, that the co-limit set co(x0) of an element x0 6 X is a single equilibrium point (see [108] and [26] as well as Section 4.1 below). (ii) Adapting the proof of Lemma 2.9 one shows that, if the or-limit set c~(E) of the nonempty subset E of X is nonempty, compact and 6 x ( H ( t , E), ~(E)) --+ 0 as t ~ + ~ in G +, then or(E) is invariant. If moreover, H(t, E) is connected for any t E G +, or(E) is invariantly connected. If, in addition, either or(E) C E or S(t) is a continuous semigroup, then or(E) is connected. Of course, similar properties hold for the ot,:-limit set of negative orbits Uz through z~X. The following property had already been proved for instance by Hale in 1969 [92]. PROPOSITION 2.1 1. Let S be a semigroup on X. If E is a nonempty subset of X and there exists r ~ G + such that V+ (E) is relatively compact, then co(E) is nonempty, compact and attracts E. In the case X - •", the hypotheses of Proposition 2.11 hold if we only assume that y + ( E ) is bounded. If there exists to 6 G + such that S(t) is compact for t > to in G +, then the hypotheses of Proposition 2.11 still hold, when y+ (E) is bounded, even if X is infinite-dimensional. Semigroups that are compact for t > 0 occur in the study of parabolic equations or retarded differential equations etc. However, there are examples, like the damped wave equation, where the associated semigroup is not compact and yet the properties given in Proposition 2.11 hold. For this reason, we consider the more general class of asymptotically smooth semigroups, which has been introduced in 1972 by Hale et al. [100]. DEFINITION 2.12. The semigroup S is asymptotically smooth if, for any nonempty, closed, bounded set B C X, there exists a nonempty compact set J -- J (B) such that J attracts {x e B lS(t)x 9 B, u ~ G+}.
Global attractors in partial differential equations
897
One remarks that S is asymptotically smooth if and only if, for any nonempty, closed, bounded set B C X for which S ( t ) B C B, for any t E G +, there exists a compact set J C B such that J attracts B (see [94]). Obviously, if the semigroup S(t) is compact for t > to ~> 0, then S(t) is asymptotically smooth. Asymptotically smooth semigroups have the following important property (see [94, Chapters 2 and 3]). PROPOSITION 2.13. If S is an asymptotically smooth semigroup on X and E is a nonempty subset of X such that v + ( E ) is bounded for some r E G +, then co(E) is nonempty, compact, invariant and attracts E. In 1987, Ladyzhenskaya [ 137] introduced the notion of asymptotically compact semigroups. DEFINITION 2.14. The semigroup S is asymptotically compact if, for any bounded subset B of X such that V+ (B) is bounded for some r E G +, every set of the form {S(t,,)z,, }, with z, E B and t, E G +, t,, ---~,~--,+~c +oc, t, ~> r, is relatively compact. We remark that Proposition 2.13 at once implies that every asymptotically smooth semigroup S is asymptotically compact. On the other hand, Ladyzenskaya [ 137] had proved that, if S(t) is an asymptotically compact semigroup on X and E is a nonempty subset of X such that v + ( E ) is bounded for some r E G +, then co(E) is nonempty, compact and attracts E. From this result, one immediately deduces that any asymptotically compact semigroup is asymptotically smooth, obtaining thus the following result. PROPOSITION 2.15. Let S be a semigroup on X. Then, S is asymptotically smooth if and only if it is asymptotically compact. Since the concepts of asymptotically compact and asymptotically smooth are equivalent, I will not distinguish them in the sequel. I prefer to use the term asymptotically smooth, because it appeared first. Moreover, the term asymptotically compact is now misleading, because some authors, like Ball [15], Sell and You [198], call a semigroup asymptotically compact if for any bounded subset B of X, any set of the form {S(t,,)z,,}, with z,, E B and t,, E R, t,, --+,,-~+oc +cx~, t,, ~> r, is relatively compact. The property of eventual boundedness of orbits of bounded sets is included in this definition, whereas, this is not the case for asymptotically smooth semigroups. In 1982, in his study of the homotopy index for semiflows in non locally compact spaces, Rybakowski introduced the related concept of admissibility (see [193] and also the appendix of [ 103]). Let S(t) be a (local) continuous semigroup on X and N be a closed subset of X. The subset N is called S-admissible if for every sequence {z,,} C N and every sequence t,, E R, t,, --+,~+~c +oc, such that
{S(t)z,, It E [0, t,,]} C N,
for any n E N,
the set {S(t,,)z,, In E N} is relatively compact. As pointed out by Rybakowski, the notions of admissibility and asymptotically smooth semigroups are not equivalent [ 103].
898
G. Raugel
REMARK 2.16. (i) One can also show that, if S(t) is an asymptotically smooth semigroup on X and E is a nonempty subset of X such that F - ( E ) is nonempty and bounded, then o~(E) is nonempty, compact, invariant, and 8 x ( H ( t , E), or(E)) --+t~+~ 0 (for a proof, see [94, Chapters 2 and 3] or [77]). (ii) Likewise, one shows that, if S(t) is asymptotically smooth and there exists a bounded negative orbit u z E C ~ 0], X) through some z 6 X, then the C~u.limit set ot,: (z) is nonempty, compact, invariant and 8 x ( u z ( - t ) , c~,=(z)) --+t~+oo O. Statement (ii) of Remark 2.10 implies that otu=(z) is invariantly connected. If, moreover S(t) is a continuous semigroup, then ot,,=(z) is connected. Proposition 2.13 indicates that, if a global attractor A exists, then A contains the co-limit set of any bounded set.
2.3. Global attractors We are now ready to recall the definition of a global attractor and state its basic properties. In this paragraph, we also give the fundamental theorem of existence of compact global attractors. DEFINITION 2.17. A nonempty subset A of X is called a global attractor of the semigroup S if: (1) A is a closed, bounded subset of X, (2) A is invariant under the semigroup S, (3) A attracts every bounded subset B of X under the semigroup S. In the same way, one defines local attractors. A nonempty subset J of X is a local attractor if J is closed, bounded, invariant and attracts a neighbourhood of itself. In the past, a special class of global attractors has mainly been studied: it is the class of compact global attractors. If S(t) is a continuous semigroup and the global attractor A is compact, it is straightforward to show that, given a trajectory y+(x0), there exist sequences of positive numbers e,l, t,z and a sequence of points Yn E A, such that e,7 --+,,~+ec 0, tn+l > t,,, t,+l - t,, --+,,~+oc + o c , and 3x(S(t)xo, S(t - t,,)yn) 1, and let ~j, j ~> 1, be a sequence of real numbers, 0 < ~j < 1, for j ~> 1. We introduce the linear mapping defined on the basis vectors by S e j -- ~.jej. Since IlSxllH 0, where r l (t) is a compact linear map for t > to ~> 0 and the linear map r z ( t ) satisfies (2.19) with k2:t E [0,-k-cx~) w-~ [0, + ~ ) is a function such that k2(t) --+ 0 as t --+ +oo. If the positive orbit of any bounded subset B of M is bounded, one easily shows ([207,208, 94]) that then S(t) is written as a sum S(t)u = U ( t ) u + V (t)u, with U, V satisfying the hypotheses of Theorem 2.31. In the applications, it is often difficult to determine the decomposition U (t) + V (t) given in Theorem 2.31. For this reason, we shall give other criteria of asymptotical smoothness. The following result is due to Ceron and Lopes (see [29]). We recall that a pseudometric p (., .) is precompact (with respect to the norm of X), if any bounded sequence in X has a subsequence which is a Cauchy sequence with respect to p. PROPOSITION 2.34. Let X be a Banach space and S(t), t E G +, be a semigroup defined on a closed positively invariant subset M o f X. Assume that, f o r any bounded set B C M, there exists r0(B) in G +, such that, f o r any ul, u2 in B and f o r any t in G +, t ~ r0(B),
IIs~ O, the mapping S(t) is continuous on the bounded subsets of X, f o r the topology o f Y; (ii) f o r any bounded set B of X such that y + (B) is bounded in X f o r some r ~ O, every sequence S ( t j ) b j , where bj E B and tj --+.i~oc +ec, is relatively compact in Y; (iii) f o r any xo 6 X and t ~ O, we have f ' ( S ( t ) x o ) -- exp(-yt).T'(xo) +
f0
e x p ( - y (t
-
-
S)).~'I ( S ( s ) x o ) d s ,
(2.21)
p where g > 0, .)t-(x) -- Ilxllx + ~'0(x), p > 0 and ~o, 37! are continuousfunctionals on the bounded sets of X f o r the topology of Y and are bounded on the bounded sets of X. Then the semigroup S(t) is asymptotically smooth in X. PROOF. We recall that any uniformly convex Banach space is reflexive. Let B be a bounded set in X such that v + ( B ) is bounded in X for some r ~> 0 and let S ( t j ) b j be a sequence such that bj E B and tj ---->j--+oc +(30. Since X is reflexive, there exists a subsequence, still labelled by j, such that S ( t j ) b j ~ 2 weakly in X, where z 6 B0 ----c--d(y+(B)), the closed convex hull of y + ( B ) . Due to (ii), we can also suppose that S ( t j ) b j ~ z in Y as j --+ + e c . We want to show that S(t})bj, --+ z in X, where j ' is a subsequence of j, j~ ~ +oo. Since X is uniformly convex, it suffices to show that limj,__,+~ IIS(tj,)bj'llx - Ilzllx, for some subsequence j ' of j. As S ( t j ) b j converges weakly to z, we already know that Ilzllx ~< liminfj__,+~ IIS(tj)bjllx. Thus, it remains to show that l i m s u p j , _ , + ~ IIS(tj')bj, llx 1 O, S(tj, - n -k- t)bj, --+ S(t)z,, in Y. In particular, S ( n ) z , - z. We consider now the equality (2.21) for t -- n and xo - S(tj, - n)bj,, when tj, - n > / r . From (2.21), (2.22) and the dominated convergence theorem of Lebesgue, we deduce that
p l i m s u p ( l l s ( t j ' ) b j ' l l x ) + ~o(z) 0 and if S(tj)bj is a sequence such that b j E B and t j ----~j--+cx~ -Jr-00, then there exists a subsequence j ' , such that S ( t j , ) b j , converges strongly in Z to some element z E B0 =-- ~ x (9/+ (B)). (ii) Moise et al. [166] consider more general functionals on Y, in the case where Y is the space X endowed with the weak topology. (iii) A similar result holds for discrete semigroups S provided that the equality (2.21) is replaced by
U(S"xo)
=
exp(-yn)U(x0) + ~
e x p ( - y ( n - m)lU, (Smxo)as,
Vn E N.
(2.23)
In z 0
Further example of asymptotically smooth semigroups: u-contracting and condensing semigroups. Another class of examples of asymptotically smooth semigroups is given by the u-contracting and condensing semigroups. Let now X be a Banach space and 13 be the set of its bounded subsets. The mapping ot :B ~ [0, +cxz), defined by or(B) = inf{l > 0 I B admits a finite cover by sets of diameter ~< l}, is called the (Kuratowski)-measure of noncompactness or, shorter, the ol-measure of noncompactness. It has the following properties (see [52], for example): (a) or(B) - - 0 if and only if B is compact; (b) or(.) is a seminorm, i.e., ot(kB) = ]klot(B) and ot(Bl + B2) ~ or(B1) 4- ot(B2);
Global attractors in partial differential equations
911
(c) Bl C B2 implies a ( B l ) ~< a(B2); a ( B l U B2) = m a x ( a ( B l ) , a(B2)); (d) a ( B ) = a ( c o ( B ) ) ; (e) a is continuous with respect to the Hausdorff distance Hdistx. A continuous map S : X --+ X is a conditional a-contraction of order k, 0 ~< k < 1, with respect to the measure a if a (S (B)) ~< ka (B), for all bounded sets B C X for which S (B) is bounded. The map S is an a-contraction oforder k if it is a conditional a-contraction of order k and a bounded map. A continuous map S : X -+ X is a conditional a-condensing map, with respect to the measure a if a (S(B)) < a (B), for all bounded sets B C X for which S(B) is bounded and a ( B ) > 0. The map S is a-condensing if it is conditional a-condensing and bounded. Every bounded linear operator S can be written in the form S -- U + V, where the linear map U is compact and the spectral radius of V is the same as the radius of the essential spectrum of S. Also there exists an equivalent norm on X such that IISIIL(x,x) r(Cress(S)), with respect to this new norm. From a result of Nussbaum [171] stating that r(O'ess(S)) = l i m , , - , + ~ ( a ( S " ) ) I/'', it follows that S is an a-contraction with respect to a norm equivalent to the one of X if and only if r (O'ess(S)) < 1. The prototype of a-contraction is given by the nonlinear map S = U + V, where U is a nonlinear compact map and V is a globally Lipschitz mapping with Lipschitz constant k, 0 ~ O, is a-condensing if, for any bounded set B in X and for any t > 0, the set S (t) B is bounded and a (S (t) B) < a (B) if a (B) > 0. It is shown in [29] that if S(t) is a semigroup satisfying the assumptions of Proposition 2.34 with M = X and the function k is independent of [IBllx, then S(t) is an
G. Raugel
912
a-contraction. In particular, if S(t) is a semigroup satisfying the assumptions of Theorem 2.31, where M = X and V (t) is a globally Lipschitz function with Lipschitz constant k(t) --+t~+~ O, then S(t) is an c~-contraction. Conditional a-contractions S(t) are asymptotically smooth (see [94]). Theorem 2.37 and Theorem 2.26 imply the following result (for a proof, see [94, Section 3.4]): THEOREM 2.38. Let X be a Banach space and S(t), t >~O, be a continuous semigroup on X. If moreover S(t), t >~O, is an u-contraction with contracting function k(t) ~ [0, 1), is point dissipative and if for any bounded set B C X, there exists r ~ 0 such that y+ (B) is bounded, then S(t) has (at least) an equilibrium point.
2.5. Minimal global B-attractors In some applications, it happens that there exists an unbounded invariant set that attracts all bounded sets. For this reason, we recall here the more general definition of a minimal global attractor. Let X be a metric space and S be a semigroup on X. Following Ladyzenskaya [ 137], we say that a set A C X is a minimal global B-attractor if it is a nonempty, closed, set that attracts all bounded sets of X and is minimal with respect to these properties. The following result was noted in [ 110]. PROPOSITION 2.39. The semigroup S on X admits a minimal global B-attractor .Ax on X if S is asymptotically smooth and if for any bounded set B C X, there exists r ~ G + such that V+ (B) is bounded. Moreover, A x is invariant and
As--Clx(U{CO(B)IB
boundedsubsetofX}).
PROOF. It is a direct consequence of Proposition 2.13.
5
If, under the assumptions of Proposition 2.39, the union of the co-limit sets of all the bounded sets is bounded, then A x is the compact global attractor. It was asserted in [ 110] that, under the hypotheses of Proposition 2.39, the minimal global B-attractor is always locally compact. However, this is not the case as has been shown with an example by Valero (see [38]). Consider the flow S(t) of the linear ODE k = Bx where B is a n • n matrix, which, for example, has one positive eigenvalue and n - 1 negative eigenvalues, then the onedimensional unstable manifold of the origin is an unbounded minimal B-attractor. Another simple example is the flow S(t)" ]R 2 ~ ]R2 of the ODE .f - 0, ~ - - y . The minimal global B-attractor for S(t) is the x-axis. This equation has a first integral ~ ( x , y) = x. On every level set {Pc = {(x, y) I q0(x, y) = c}, S(t) has a compact global attractor (c, 0). This example is a special case of an evolutionary equation on a space X, which has a continuous first integral r It is often the case that on each level set r the associated semigroup S(t) admits a compact global attractor Ac. Then the minimal global B-attractor .Ax is given by A x = Clx(Uc~R Ac). Other examples of such systems with first integrals are studied in [ 111, Section 6].
Global attractors in partial differential equations
913
Examples of minimal global B-attractors, that are not necessarily global attractors, arise in the study of damped wave equations with local damping (see [ 110]). An example of an unbounded minimal global B-attractor is also given in [ 186]. Different notions of global attractors involving two different spaces are considered in [13,159,60,98,158], for instance. Often, the semigroups S(t) generated by evolutionary partial differential equations on unbounded domains are no longer asymptotically smooth on function spaces, which are large enough to contain all the interesting dynamics. One way to overcome this difficulty is to introduce two different adequate topologies on the space X, so that, on the bounded sets for the first topology, S(t) is asymptotically smooth for the second topology (see [158], for details).
2.6. Periodic systems In this paragraph, we very briefly indicate that the notion of global attractor can be extended to evolutionary equations, which are nonautonomous. Let X be a Banach space. We consider, for instance, the nonautonomous evolutionary equation db/ - - ( t ) = f (t, u), dt
u(s) = uo e X,
(2.24)
where f is a continuous map from IR x X into X and is Lipschitz-continuous in u on the bounded sets of X. Then, through each point (s, u0) of R x X, there exists a unique local solution u (t, s, u0, f ) of (2.24). Under appropriate hypotheses on f , this solution is global and we set u(t, s, uo, f ) = S(t, s)uo. The operator S(t, s) : X --+ X satisfies the relations S(s, s) = Id,
Vs ~ R,
S(t,s)=S(t,r)S(r,s),
for any t ~> r ~> s,
(2.25)
and has also has the following properties S ( t , s ) ~ C~
s(t, s)uo ~ c ~
g s e l R , gt>~s,
+,c). x),
Vs ~ R, Vu0 ~ x.
(2.26)
For later use, we introduce a subset 9c C C~ x X, X), which consists of functions g(t, u) satisfying the above conditions. If there exists co > 0 such that f (t + co, u) = f (t, u), for any (t, u) E R x X, then S(t + co, s + co) = S(t, s),
for any t >~ s.
(2.27)
More generally, let (X, d) be a metric space and let us consider a family of operators S(t, s) : X --~ X, s e IR, t >~ s, satisfying the conditions (2.25), (2.26) and (2.27). Since S(t, s) is periodic, it is meaningful to introduce the associated period map To = S(co, 0) and study the existence of a global attractor for To. We begin with a lemma, which shows
914
G. Raugel
that for period maps, there is an equivalent form of point dissipativness which is easier to verify (see [181] in the finite-dimensional case and [99] in the general case). LEMMA 2.40. Let S(t, s) : X --+ X, s 9 IR, t ~ s, satisfying the conditions (2.25), (2.26) and (2.27). Assume that, f o r any bounded set B C X, there exists no = no(B) such that Un>no T~ (Uo~<suoll
< r.
(2.29)
As a consequence of Lemma 2.40 and Theorem 2.26, we obtain the following result: THEOREM 2.41. Let S ( t , s ) : X --+ X, s 9 R, t ~ s, satisfying the conditions (2.25), (2.26) and (2.27). Assume that the property (2.29) holds, that To is asymptotically smooth and that, f o r any bounded set B C X, there exists no = no(B) such that Un>~no TO~(UO 0, U (t, s) 9 C ~ X) and U (t, s)u 9 C ~ + ~ ) , X), for any u 9 X and s 9 N. The process is periodic if there exists a positive number w such that U (t, s + w) -- U (t, s), for any t >~ 0, s 9 IR. Let us remark that processes are natural extensions of the notion of continuous semigroups. Indeed, if one defines the operators r ( t ) :[s, u] 9 R x X ~-+ [s + t, U(t, s)u] 9 IR x X, Z'(t), t ~> 0, is a continuous semigroup under the additional hypothesis that U (t, s)u is jointly continuous in (s, u). Unfortunately, since the time variable does not belong to a compact set, the semigroup s will never have a compact global attractor. Thus, when U(r, s) is not periodic, one needs to find another way to generalize the notion of compact attractor to nonautonomous systems. Let us come back to evolutionary equation (2.24). For any t/> 0, we introduce the translation c r ( t ) ( f ) defined by c r ( t ) ( f ) ( s , x) -- f ( t + s, x). We suppose now that the set .T" is a metric space, with the property that f e .T" implies that the translation c r ( t ) ( f ) belongs to .T'. For any t ~> 0, we define re(t) :X x .T" --+ X x ~" by re(t)(uo, f ) -- (u(t, O, uo, f ) , c r ( t ) ( f ) ) .
(2.30)
Global attractors in partial differential equations
915
One easily shows that re(0) = ld and that :r(t + s)(u0, f ) = rc(t)rc(s)(uo, f ) . If the family 9t- is chosen so that zr satisfies the continuity properties required in Definition 2.1, we have thus defined a continuous semigroup on X • .T', which is called the skew-product flow of S(t, s) or the skew-product flow of the associated process U(r, s). Under appropriate compactness hypotheses on ~ , one can thus study the existence of global attractors for the continuous semigroup 7r(t). Skew-product flows had been first exploited by Miller [160] and Sell [ 196] (see also [ 197]) in the frame of ordinary differential equations. Skew-product flows have also been associated to more general processes U(r, s) (see [49]). For further study of global attractors associated to nonautonomous systems, we refer to [34,35,161,94, 118,198].
3. General properties of global attractors In the previous section, only a few properties of global attractors have been given. In general, the invariance and attractivity of the global attractors, combined with some additional hypotheses, imply interesting robustsness and regularity properties. Often also, the flow restricted to the global attractor shows finite dimensional behaviour. In this section, we are going to briefly describe such additional properties for compact global attractors.
3.1. Dependence on parameters One of the basic problems in dynamical systems is to compare the flows defined by different semigroups. In the study of semigroups restricted to a finite dimensional compact manifold (with or without boundary), this comparison is made very often through the notion of topological equivalence (for the definition, see below). If the semigroups are defined on a finite or infinite dimensional vector space for example, then considerable care must be taken in order to discuss the behaviour of orbits at infinity. If each of the semigroups has a compact global attractor, one can hope to consider the topological equivalence of the flows restricted to the global attractors. This is the strongest type of comparison of flows that can be expected in the sense that it uses the very detailed properties of the flows. In particular, it requests the knowledge of transversality properties, that are very difficult to show in the infinite-dimensional case. For this reason, we begin with much weaker concepts of comparison, like estimates of the Hausdorff distance between the global attractors. We shall mainly give general comparison results and refer the reader to Section 4 and to [ 13,94,97, 101,105,106,108,111,130,187,201,204] for applications to (singularly) perturbed systems and discretised equations. In this paragraph, (X, d) still denotes a metric space and we consider a family of semigroups S~ (t), t E G +, depending on a parameter ~, E A, where A = (A, d~) is a metric space. For sake of clarity, we assume that all the semigroups S~ are defined on the same space X, although in many applications, each S~ may be defined on a different space X~. Then one has to determine first how to relate these spaces in order to have a concept of convergence of the semigroups S~, which replaces the hypotheses (H. 1a), (H. lb) or (H. 1c) given below. Such situations arise in the discretisation of partial differential equations, in problems on thin domains etc. (for more details see [ 101,105,111,112]).
916
G. Raugel
We assume that each semigroup S)~ has a global attractor A)~ and, if 1.o is a nonisolated point of A, we are interested in the behavior of A)~ when 1. --+ 1.0. We say that the sets A), are upper semicontinuous (respectively lower semicontinuous) on A at 1. = 1.0 if lim 6 x ( A z , AZo) = 0, XEA--+Xo
(respectively
lim
XcA--~Xo
8x(Azo, Az) = 0).
(3.1)
We say that the sets A)~ are continuous at 1.o if they are both upper and lower semicontinuous at 1.o. Due to the strong attractivity property and the invariance of the attractors, the upper semicontinuity property holds if the dependence in the parameter is not too bad. To get upper semicontinuity, one often assumes that either (H. 1a) There exist ~ > 0, ro 9 G + with ro > 0 and a compact set K C X such that
U
Az C K,
(3.2)
)~ENA(XO,rl)
and if 1.k --+ 1.o, xk 9 Azk, for k 7~ 0 and xk ~ xo, then Szk (ro)xk --+ Szo (ro)xo;
or (H. lb) There exist 7/> 0, to 9 G + with to > 0 and a bounded set Bo C X such that
U
Az C Bo,
(3.3)
)~ENA(X0,t]) and, for any e > 0, any r 9 G +, r ~> to, there exists 0 < 0 = 0(e, r) < ~ such that
SX (S~('t')x),, Szo(r)x)~) 0 such that Sz(t)x --+ Szo(t)x uniformly for (t,x) in bounded sets of G + x X2, as A. E A ~ 1.0, holds. Hypotheses (H. 1a) or (H. 1b) imply upper semicontinuity of the attractors at 1. = 1.0 (see [94, Theorem 2.5.2]). PROPOSITION 3.1. Let 1.0 be a nonisolated point of A. If the hypothesis (H.la) or (H.lb) holds, the global attractors A z are upper semicontinuous on A at 1. = 1.o; that is, lim)~eA~)~0 6X(A)~, A)~o) = 0. PROOF. (1) We give only the proof in the case when G + = [0, +oo). Under the hypothesis (H. 1a), the global attractors Az for 1. E NA (1.0, 7/) are compact. We remark that .Az is also the compact global attractor of the discrete semigroup Sz (r). To prove upper semicontinuity, it suffices to show that, for any sequences 1.k E NA (1.0, rl), k >~ 1, xk E .Azk, k >~ 1,
Global attractors in partial differential equations
917
such that )~k -+ )~0, xk -+ x0, the limit x0 E Az 0. Since A;~k is invariant under Sz k (to), there exists x k E Azk such that xk -- S~,k (r0)(x2). Without loss of generality, due to the compactness of K, we can assume that the sequence x~ converges to some element x~. The hypothesis (H.la) implies that x~ -- Sz k (r0)x0. Using a recursion argument, one thus 9
.
.
obtains an infinite sequence x~ e K, j --~ +oo, where SzJk(ro)x~ -- xo. Clearly, the complete orbit V(xo) - {S '1 (ro)xo In E Z} is bounded in X which implies that xo E .Azo. Lk (2) Let e > 0 be fixed. Since .Azo is the global attractor of Szo(t), there exists a time r~ ~> to such that
Szo(t)Bo C Nx(Azo, e/2),
'v't ~> rc.
(3.5)
By hypothesis (H. lb), there exists 0 > 0, such that, for )~ E NA ()~0, 0),
6x(Sx(r~)x~,, Sx0(r~)xx ) ~< e/2,
'v'x;~E A;~,
which, together with (3.5), implies that Sz(r,)A~, C Nx(Azo,e). Since Az is invariant, A~ c Nx(A~o, e). D In general, the lower semicontinuity property does not hold, as shown by the simple ODE ~f - - (1 - x ) ( x 2 - )~),
(3.6)
where ~ E [--1, 1]. Here, A0 = [0, 1], Ax = 1, for )~ < 0 and A~, = [ - q ' ~ , 1], for )~ > 0 and a bifurcation phenomenon occurs. In general, lower semicontinuity at a given point ~.0 is obtained only by imposing additional conditions on the flow. It is mainly known to hold in the case of gradient like systems, when all the equilibrium points are hyperbolic (see Section 4 below). However, as pointed out in [7], the lower semicontinuity property is generic, under simple compactness assumptions. We recall that a subset Q of a topological space A is residual if Q contains a countable intersection of open dense sets in A. We say that a property (P) of elements of A is generic if the set {)~ E A I~. satisfies (P)} is residual. Let K be a compact metric space and K c be the set of compact subsets of K. It is well known (see [132]), that, if A is a topological space, and f : A -+ K C is upper semicontinuous at any ,k E A, then there exists a residual subset A0 C A such that f is continuous at every )~0 E A0. Here we apply this property to compact global attractors A~,, satisfying the hypothesis (H. la), with ,~ E NA (X0, 17) replaced by )~ E A. COROLLARY 3.2. If the hypothesis (H.la) holds, with )~ E NA ()~0, 17) replaced by )~ E A, there exists a residual subset Ao of A such that the sets .A~ are continuous at any )~o E Ao. The parameter ~. can be the domain f2 C IR'l on which one defines a partial differential equation. In [7], Babin and Pilyugin have applied Corollary 3.2 to prove generic continuity of global attractors of nonlinear heat equations with respect to the domain S-2, thus recovering some of the earlier results of Henry [ 122,124].
918
G. Raugel
The hypotheses (H. 1a) or (H. 1b) do not allow to estimate the semidistance 6x (.Az, .Azo). It becomes possible, if one imposes stronger attractivity properties on AZo (see [ 101 ], [ 13, Chapter 8]): PROPOSITION 3.3. Assume that ~o is a nonisolatedpoint of A and that Hypothesis (H. lb) holds. Suppose also that there exist positive constants oto, go, Yo, co and c~ such that
6x(Szo(t)Bo, AZo) to, t ~ G +,
(3.7)
and, for any )~ ~ NA ()~0, ~), for any x ~ Bo, 6x(Sz(t)x, Szo(t)x) 0 and Ol 0 is small enough. From the estimates (3.7) and (3.8), we deduce that 6x(Sz(tl)Az, Az o) ~ 0}
(3.14)
are embedded C"-submanifolds of X. These sets are called the local stable and local unstable manifolds of x0. The manifold Wioc (xo, S) is positively invariant, whereas W{'oc(x0, S) is negatively invariant. Moreover W{'oc(x0, S) is locally positively invariant. If the part of the spectrum cr (DS(xo)) lying outside the unit circle is composed of a finite set of m eigenvalues, then Wl"oc(x0, S) (respectively Wi~oc(xo, S)) is an embedded C"-submanifold of dimension m of X (respectively of codimension m of X). If S and the derivative DS(y) are injective at each point y of U,7~>0(S'1(W~oc(X0, S)), then W"(xo, S) = U,~>0(s" (W{~oc(X0,s)) is an injectively immersed Cr-submanifold of X, of the same dimension as W{'oc(xo, S), and is invariant. If Wi~oc(xo, S) is of finite codimension m, if S is injective and the derivative DS(y) has dense range at each point y of U,,>~o(S-"(Wi~oc(XO, S)), then W~(xo, S) = ~,,>~o(S-'l(Wioc(XO, S)) is an injectively immersed C"-submanifold of codimension m of X (see [121, Theorem 6.1.9]). Moreover, W s (xo, S) is invariant under S. For further details, see also Section 4.1. A point x0 is a periodic point of period p if SP(xo) = xo, S" (xo) 7~ xo, for 0 < n ~< p - 1. A periodic point x0 of period p is hyperbolic if the (finite) orbit O(xo) -{x0, S(xo) . . . . . S/'-j (x0)} of x0 is hyperbolic, that is, if every point y E O(xo) is a hyperbolic fixed point of S p. As above, one introduces the sets Wi~oc(y, S) and W~'oc(y, S) and W"(y, S) = U,,>~o(S"P(W~'oc(Y, S)), for every y E O(xo). These stable and unstable sets have the properties mentioned in Remark 3.7. Hereafter, we denote by Per(S) the set of periodic points of S. Let S 6 C" (X, X), r >~ 1. The nonwandering set I2(S) of S is the set of all points x 6 J ( S ) (where J ( S ) is the maximal bounded invariant set of S) such that, given a neighbourhood V of x in J ( S ) and any integer no, there exists n >~ no with S" (V) A V -r 0. If S-2(S) is finite, then I2 (S) = Per(S). One also notices that, if J ( S ) is compact and S is injective on J ( S ) , then I2 (S) is compact and invariant. Following [ 175,103], we introduce a topological subspace 1CCr (X, X) of C~ (X, X), r >~ 1, with the following properties: (KC 1) S c/CC' (X, X) implies that ff (S) is compact; (KC2) the sets if(S) are uppersemicontinuous on E c r ( x , X), that is, for any S E /CC" (X, X), given a neighbourhood U of if(S) in X, there exists a neighbourhood V(S) of S in ICCr(X, X) such that i f ( T ) C U, for any T E V(S); (KC3) for any S E EC" (X, X), S and D S are injective at each point of J ( S ) . EXAMPLE. Let S)~ 6 C~ (X, X), r ~> 1, be a family of maps depending on a parameter k A, where A is a metric space. Assume that each map Sx admits a compact global attractor ,Ax and satisfies the hypothesis (H. la) or (H. lb) at every point k0 c A. Then, J(S)~) - r
G. Raugel
922
and the sets r are uppersemicontinuous in )~. If moreover the above condition (KC3) holds, the family Sz, )~ 6 A, can be chosen as a EC, r (X, X)-space. Finally, we introduce the class of Morse-Smale maps: DEFINITION 3.8. A map S 6 C~ (X, X), r/> 1, is a Morse-Smale map if the above conditions (KC 1) and (KC3) as well as the following conditions are satisfied: (i) S2 (S) is finite (hence ~ ( S ) = Per(S)); (ii) every periodic point x0 of S is hyperbolic and dim W" (x0, S) is finite; (iii) W" (x0, S) is transversal to Wi~oc(x l, S), for any periodic points x0 and Xl of S. If S is a Morse-Smale map, then
,7(s) -
~_J
w ~(x0, s).
x0EPer(S)
The Morse-Smale maps have a remarkable property, namely they are J-stable. DEFINITION 3.9. A map S 6 K~Cr (X, X) is J-stable or simply stable if there exists a neighbourhood V(S) of S in ]CCr (X, X), such that each T E V(S) is conjugate to S, that is, there exists a homeomorphism h = h (T) : J (S) --+ ff (T) satisfying the conjugacy condition h o S = T o h on ,,7"(S). Adapting the arguments used in [ 177] and in [ 178], Oliva showed, mutatis mutandis, the following basic result (see [ 175,103]): THEOREM 3.10. Let a subspace ]~C r (X, X) of C~(X, X), r ~> 1, be given. The set of all r-differentiable Morse-Smale maps is open in 1CCr (X, X). Moreover, every Morse-Smale map S in 1CCr (X, X) is J-stable. This result has important applications in the study of partial differential equations depending on various parameters, including time or space discretisations. In Section 4, we shall apply it to gradient systems. If Sz ~ C r (X, X), r ~> 1, is a family of maps depending on a parameter )~ ~ A and Sz0 is a Morse-Smale map, Theorem 3.10 allows to conclude that, for )~ close to )~0, Sz has the same type of connecting orbits. If Sz0 is no longer a Morse-Smale map, this persistence of connecting orbits can still be proved in some cases, with the help of the Conley index (see [46,163,164], for example). If $1 (t) and S2(t) are two continuous semigroups on a Banach space X, we say that $1 (t) is topologically equivalent or simply equivalent to $2 (t), if there exists a homeomorphism h : ff(Sl) ~ J ( S e ) , which preserves the orbits and the sense of orientation in time t. A continuous semigroup Sl (t) is stable if there exists a neighbourhood N(S1 (.) of S1 (.) within a given class of continuous semigroups such that every semigroup T(.) ~ N(S1 (.)) is equivalent to $1 (.). Like above, one can define Morse-Smale continuous semigroups. Very recently, Oliva has given a proof of a stability result for Morse-Smale continuous semigroups in the infinite-dimensional case. Also, stability of certain continuous MorseSmale semigroups Sz (t) generated by evolutionary equations has been proved by reducing
Global attractors in partial differential equations
923
Sz (t) to a Morse-Smale system Sz(t), defined by a finite-dimensional system of ODE's depending smoothly enough on the parameter ,k (see Section 3.4 below on inertial manifolds).
3.2. Dimension of compact global attractors The existence of a (compact) global attractor A C X leads to the question of whether there exists a finite-dimensional dynamical system whose dynamics on its global attractor reproduces the dynamics on A or at least whose attractor has the same topological properties as A. Also, from the computational point of view, one is interested in knowing if the solutions on the attractor can be recovered by solving numerically a large enough system of ODE's and how big should be this system. A first step in this direction consists in showing that the "dimension" of the set ,A is finite and in giving a good estimate of it. Various notions of dimension have been studied in conjunction with global attractors. Among them, the Hausdorff and fractal dimensions have played a primordial role. We will briefly describe both notions and state some results. For an exhaustive study in the Hilbertian framework, we refer to the book of Temam [202]. Let E be a topological space. We say that E has finite topological dimension if there exists an integer n such that, for every covering H of E, there exists another open covering H' refining H so that every point of E belongs to at most n + 1 sets of H'. In this case, the topological dimension dim(E) is defined as the minimal integer n satisfying this property. It is a classical result that, if E is a compact space with dim(E) ~< n, where n is an integer, then it is homeomorphic to a subset of •2,,+1. Moreover, the set of such homeomorphisms is residual in the set of all maps from E into R 2''+1 . However, special properties of such embeddings are not known, and, in the case where E is contained in a Banach space, it could be more convenient to deal with linear projections (simply called projections in what follows). As generalizations of the topological dimension, there are several stronger fractional measures of dimension applicable to sets which have no regular structure. The most commonly used are the Hausdorff and fractal dimensions. Let E C X, where X is a metric space. The Hausdorff dimension is based on approximating the d-dimensional volume of the set E by a covering of a finite number of balls with radius smaller than ~, that is,
r? [ri m, the set of projections P : X ~ Y
G. Raugel
926
such that PlY is injective on Y is a residual subset of the space of all the (continuous) projections from X onto Y, endowed with the norm topology. This result has been given in [149], where, by an unfortunate mistake, dimF(K) has been replaced by dim/4(K). One notices that the statement is no longer true with the hypothesis dim/4 (K) < m / 2 (see [ 195]). Recently, in the Hilbertian case, the above result has been improved by Foias and Olson, who showed that the inverse (Ply)-1 of most projections P are H61der continuous mappings. In general, these inverse are not Lipschitz-continuous [ 165]. THEOREM 3.12 (Marl6; Foias and Olson). Let X be a Hilbert space and K be a compact subset of X with fractal dimension dimF(K) < m/2, m ~ 1~. Then, for any projection (respectively orthogonal projection) Po onto a subspace Y of X of dimension m and for any e > O, there exist a projection (respectively orthogonal projection) P onto Y and a positive numberO 1; (H2) The continuous semigroup S(t) has a compact invariant set if; (H3) For any n ~> 1, n 6 1% there is a continuous linear map P,, :Z ~ Z, where Z - X or Y, such that APn = Pn A on D(A), and the following additional properties hold:
Global attractors in partial differential equations
929
(i) P,, converges strongly to the identity in Z as n goes to infinity; (ii) there exists a positive constant K0/> 1 such that, if Q,, - Id - P,,, then,
I P,,llL(z.z) 1 such that, for n >~ n l, t > 0, we have,
HeAtw Z X is completely continuous. If X is a reflexive Banach space, one shows, by arguing as in [147, p. 339] that this property implies the hypothesis (H5). We recall that, for any k > 0, B z (0, k) denotes the open ball in Z of center 0 and radius k. Let r be a positive constant such that Ilullv ~< r / K o , for any u E ,.7". In what follows, we denote by C~,,(By(O, 4r)" X) the subset of Ck(By(O, 4r); X) of the mappings g whose derivatives D j g(u), j n l, the property (3.22) implies that
w(t) -
i
eA(t-S) Qn f (V(S) + w(s)) ds.
(3.26)
oo
In what follows, we shall always choose n ~> n l. For d > 0 and n ~> 1, we introduce the following sets,
Up,,y(J,d)
-
UQ,,y(d) -
{v 9 y y I IlvllY < 2r, disty(v, Pnfl) < d}, {w 9 WV~ l llwllY < inf(d, 2r)}
as well as the subsets
c ~ r ( y , d) -
C~
C~. ~ (d) = C~
ue,,r(a,
d)),
p , , y ( J , d ) - c~. (R; u~,,y(J,d)), k,. r (d) - Cb, k , (IR. Uo,, r (d)), CO,,
c k , ll
UO,,~ (d)),
where k ~> 1. The equality (3.26) suggests that, given v 9 C~ tained as a fixed point of the operator Tv (w)'C~
Tv(w) -
f
d), the function w(t) can be oby (d) --+ CoQ,, r (d) defined by
eA(t-S) Qn f (V(S) + w(s)) ds.
(3.27)
oo
The problem consists now in finding d > 0 and No ~> n l, such that, under the above hypotheses, the mapping Tv is indeed a uniform contraction from C~ into itself, for n ~> No. Actually, motivated by the next remark, we shall also prove that Tv is a uniform r'~QnY (d) into itself, for n ~> No. contraction from ,.. REMARK. If ,.7 is a compact invariant set for S(t), the set of the complete orbits u(t) of (3.17) contained in ,.7 is uniformly equicontinuous; that is, for any positive number r/0, there exists a positive number ~/l such that, for any t 9 R, for any complete orbit u(R) C ,.7, ]lu(t + r) - u ( t ) [ i y 2. However, we can obtain higher order regularity results [113], as it is illustrated in the next example where A is the generator of a C~ only, Y = X and ot = 0. We introduce a family of spaces ZI, l 6 1~, with ZI+I C Z1, Zo = X, D(A) C Z1, such that, Au = g ,
u EZ)(A), g 6 Zl,
implies
u 6 Zl+l.
(3.35)
A simple recursion argument using Theorem 3.18 shows the next regularity result. THEOREM 3.20. Assume that Y = X, cr = O, that (3.35) as well as the hypotheses (H1), (H2), (H3) and either (H4) or (H5) hold and that, for any n ~ 1, APiz is a linear bounded mapping from X into X. Suppose that f belongs to C~u(Bx(O, 4r)" X), k ~> 1. If for k >~2, k-j-I
f is in Cb
(Zj" Zj), for 1 ~ 2. Let r > 0 be chosen so that A C B y ( O , r ) . We then set
fm (u) -- m
"11~)
4r 2
f (u),
and consider the modified equation du(t) dt
= Au(t) + fm (u(t)),
t > O, u(O) -- uo E Y.
(3.37)
Clearly, the function fm is globally Lipschitzian and bounded from Y into X and (3.37) also defines a continuous semigroup on Y, denoted by Sm (t). One may construct an inertial manifold for Sm (t) by using a Galerkin method. Like in Section 3.3, we choose an integer n. Given a solution u(t) of (3.37), we write u(t) = Pnu(t) + Q,,u(t) = v(t) + w(t), where (v, w) is a solution of the system dv dt
= a v + Pn fin (v + w),
dw dt
= a w + Qn fin (v + w).
(3.38)
One way for obtaining an inertial manifold A4 of Sm (t) as a graph over Vf is to solve, for every v0 e Vf the system (3.38) on ( - e ~ , 0], under the condition v(O) - vo,
w 6 C~
0), W,,r).
(3.39)
Due to (3.26), given vo e V f , (v(t), w(t)) is a solution of (3.38) and (3.39) if and only if w(t) is a fixed point of the map Tv0" Cb~ 0), Wf) --+ C ~ 0), Wf) given by
Tvo (w) --
f,
e A(t-s) Qn fm (V(S) -+- W(S)) ds, oo
where v(t) is the solution of du
dt
= A v + P,, fm (v + w),
v(0) -- v0.
(3.40)
If we prove that Tv0" C~((-e~, 0), W,Y) --+ CO( ( - o o , 0), Wf) is a strict contraction, when C~ 0), W,Y) is equipped with the norm [[wl[u - supt 0 is well chosen, then Tvo has a unique fixed point Wvo (t). One then shows that the graph of the Lipschitzian mapping tp "v0 6 V f ~+ qJ (vo) -- vo + Wvo (0) E Y defines an inertial manifold A4 of Sm (t). For example, Tv0 is a strict contraction, if ~n+l
o/
-- ~-n ~ C ~ , n + 1 ,
(3.41)
where C is a positive constant depending on the Lipschitz constant of fm and on c~. The condition (3.41) is a gap condition on the eigenvalues of A and is rather restrictive.
G. Raugel
936
Due to the positive invariance of the inertial manifold A4, Equation (3.37) on .M reduces to the finite system of ODE's: dl) d t ( t ) : Av(t) + fin(q/(v(t))) =_ g(v(t)),
t>0,
v(0) given in V,Y.
(3.42)
This system defines a flow on V,~ -- Pn Y and has a compact global attractor An - PnA. The solutions of (3.42) on P,zr are written as v(t) -- P,~Sm(t)~(v(O)), that is, the flow of (3.42) on PnA is conjugate to Sin(t). Suppose now that S(t) -- Sz (t) and also Sin(t) depend on a parameter )~ in a Banach space A and that, for each )~, one can construct an inertial manifold A//z over Vnv and an inertial form du dt
-
-
gz (v(t)),
t > O,
v(O) given in V~,
where gz and Dgz are continuous functions of v, ,k. If the flow defined by the vector field gzo is structurally stable, then we know that each flow Sz (t)IA~ is equivalent to the flow of Szo(t)lAZo, for ~ close to ,k0 (see [109,167]).
4. Gradient systems Until now, we have not described the behaviour of the flow on the global attractor. Even in the finite-dimensional case, this behaviour is often not known. In the case of the gradient systems, a partial description of the flow restricted to the attractor can be given. We first recall some general properties of gradient systems and then present a few examples of gradient systems.
4.1. General properties of gradient systems We recall that the set G + denotes either [0, + o c ) or N. DEFINITION 4.1. Let S(t), t E G +, be a semigroup on X. (1) A function 9 E C~ R) is a Lyapunovfunctional if
o(s(t)u) ~ 0, let OR(e) = {y E X I 4IlY - elll ~< R}, O R -- ON(O) A X+. One shows that there exist a positive n u m b e r R, two functions g+ E C 1(O +, O ~ ) , g_ 6 C j (OR, O + ) , such that the local stable and unstable manifolds of Sl at e are given by W s (e, Sl, OR(e)) -- {u E X lu -- e + P_(u - e) + g _ ( P _ ( u - e)),
P_(u - e) E OR}, W"(e, Sl, OR(e)) -- {u E X ] u -- e + P+(u - e) + g+(P+(u - e)),
(4.5)
e+(.-e) The functions g+ satisfy g+(0) = 0 and Dg+(O) = 0. If the index ind(e) is finite, then W"(e, Sl, OR(e)) is a manifold of dimension ind(e). Furthermore, there exist positive constants Re, Ke and fie such that, if Sll'y ~ ORe (e), for n = 1 . . . . . m, then,
6x(S11' y, W" (e, Sl, ORe (e))) Vmo of the set {q~(el), ~(e2) . . . . . ~(e,,0) } and let f j -- {eji E S I a~ (eji) - vj },
j -- 1 . . . . . mo.
The sets C 1, ~2, ...~ ~m0 define a Morse decomposition of the attractor A, i.e. (i) the subsets gJ are compact, invariant and disjoint; (ii) for any a 6 A \ g j and every complete orbit Ua through a, there exist k and l,
Uj
depending on Ua, so that k < l, otu~,(a) 6 g k and co(a) E g/. For 1 ~< k ~< m0, one defines
m0
Ak--U w,(e)le~U U
] ,
j=k
and, for 0 < d < do -= infz 0 depends on 7. This trajectory ri0(t) belongs piecewise to invariant manifolds, whose dimension increases when r/decays to zero. The assumption (4.7) implies that, for any hyperbolic equilibrium point e 6 g, there is a neighbourhood Ue of e such that, if xo E Ue\W s (e, S(t)), then there exists to = to(xo) > 0 so that S(t)xo q~ Ue, for t ~> to, that is, S(t)xo eventually leaves Ue never to return. This property plays an important role in the proof of (4.9) and also in the proof of the following theorem, stating that the unstable and stable manifolds of a hyperbolic equilibrium point are embedded submanifolds of X. THEOREM 4.8. Assume that the hypotheses of Theorem 4.7 hold and that S1 = S(1) as well as the linear map DSI (y) are injective at each point y of the global attractor .A, then, for each e ~ C, the unstable set W u (e, S(t)) is an embedded Cl-submanifold of X of finite dimension equal to ind(e), which implies that the Hausdorff dimension dim/4 (.A) is finite and equal to maxecc ind(e). If furthermore, for each e E C, SI is injective and DSI (y) has dense range at each point y of W s (e, S(t)), then the stable set is an embedded C l-submanifold of X of codimension ind(e).
G. Raugel
942
The above theorem is a consequence of Remarks 3.7, 4.4 and [121, Theorems 6.1.9, 6.1.10] (see also [8]). Under the hypotheses of Theorem 4.8, one shows that, for any hyperbolic equilibrium point e, there is a neighbourhood Qe of W s (e, S) such that, if xo ~ Q e \ W S (e, S(t)), then there exists to = to(xo) > 0 so that S(t)xo ~ Qe, for t ~> to. REMARKS.
(1) Assume that the gradient system S(t) is generated by the evolutionary equation (2.1). Under additional hypotheses, Theorem 4.8 implies that the Hausdorff dimension of the global attractor of (2.1) is estimated by the maximum of the number of eigenvalues with positive real part of A + D f (e), e ~ s If in (2.1), f is replaced by k f , one thus obtains asymptotic estimates of dimH(A), when /, --+ +cx~, by using asymptotic estimates of the number of positive eigenvalues of the operators A + k D f ( e ) (see [13, Chapter 10, Section 4]). (2) If S(t) is generated by an evolutionary equation, the injectivity of S1 (respectively DSI ) comes usually from a backward uniqueness result of the solutions of the evolutionary equation (respectively the corresponding linearized equation). And one shows that the range of DS1 is dense by proving that the adjoint map is injective. Backward uniqueness results are known to hold for a large class of parabolic equations (see [19], [121, Chapter 7, Section 6], [79]). The hyperbolicity of the equilibrium points is usually a generic property with respect to the various parameters involved in the definition of the semigroup S(t).
Gradient systems depending on parameters. As in Section 3.1, we consider a family of semigroups S~ (t) : X --+ X, t 6 G +, depending on a parameter ,k 6 A, where A -- (A, dx) is a metric space. Let k0 be a nonisolated point of A. We assume that Sx0 (t) is a gradient system satisfying the hypotheses of Theorem 4.7, the conditions (H. lb) and (3.8) of Section 3.1, then Propositions 3.1, 3.3 and Theorem 4.7 imply that, for k close enough to ,k0, we have,
SX(A)~, A)~o) ~ C~A (~,, )~0)V y ~ 1 7 6
,
(4.10)
for some positive constant c. We now turn to lower semicontinuity results and estimates of the semi-distance 6x(Ax 0, A~). Lower semicontinuity properties have been first proved in a very general setting in [10] and [105] (see also [94, Chapter 4, Section 10]). To show some of the ingredients, which are necessary, we begin with a very simple result. Hereafter, we denote by s the set of equilibria of Sx and assume that X is a Banach space, for sake of simplicity. Besides the condition (H. lb) of Section 3.1, we introduce the following hypotheses: k0 (H.2) The set s is a finite set, say s -- {e~~. . . . . e,,~,0}; (H.3) the global attractor ,A~0 is compact and n ~0
11kO
j=l
j=l
X o- U w,,(e?,
U w,, (e?, ao);
Global attractors in partial differential equations (H.4) for j - 1 . . . . . nzo, there exists a neighbourhood
Oj of e~ ~ in
943 X such that
lim (~x(W"(@ ~ Szo(1), Oj),A;~) - 0 .
)~----~)~o
If the hypotheses (H.lb), (H.2), (H.3) and (H.4) hold, the global attractors A z are lower semicontinuous at 1. = 1.o, i.e., 6 x ( A z o , Ax) --~ 0 as 1. --+ 1.o, which, together with Proposition 3.1, implies that the attractors A z are continuous at 1. = 1.o.
PROPOSITION 4.9.
PROOF. We give the proof only when G + = [0, + o c ) . Without loss of generality, we suppose that to = 1 in the hypothesis (H. l b). Assume that the sets .A)~ are not lower semicontinuous at 1. - 1.o. Then, there exist e > 0 and, for any m E N, an element 1.m E NA(1.0, 1/m) and an element ~o,,, E .Az o such that 3x(q)m, Ax,,,) > e. Since .Az 0 is compact, the sequence q),,, converges to an element ~oo E Azo and
6x(~oo, Az,,,) > el2,
(4.11)
gm E N, m >~ mo,
where mo E N, m0 > 0. If ~oo E W" (ejLo , S~o (1), Oj), for some j -- 1 . . . . . nzo, (4.11) contradicts the hypothesis (H.4) Thus, assume that ~oo ~ W" (e~.~ Szo (1) O j) for any j -- 1
nzo, then there are
no and 7ro E W" (e) ~ Sxo(1), Oi), for some i, so that 99 - Szo(no)gro. Since Az o is compact, for any e > 0, there exists 6 > 0, depending only on Axo, such that, if [Iv - gro IIx ~< 6, then, (4.12) The hypotheses (H.4) and (H.lb) imply that we can choose 0 = 0(e, n~) > 0, such that, for i. E NA (1.0, 0), there exists vz 6 ,Az so that II~o - v~ IIx ~ ~,
(4.13)
]]Sz(n~o)vz - Szo(n~o)vz x 0 and n E 1~ \ {0}, let C = C ~ 0); R") be the space of continuous functions from [ - 3 , 0] into ]t~" equipped with the norm II" II = II" IIc. For any ot ~> 0, for any function x : [ - 3 , or) ~ It~" and any t E [0, c~), we let xt denote the function from [ - 6 , 0] to It~'' defined by xt(O) = x ( t + 0), 0 E [--6, 0]. Suppose that f E C k (C, R'z), k >~ 1, and that f is a bounded map in the sense that f takes bounded sets into bounded sets. An autonomous retarded functional differential equation with finite delay is a relation (4.17)
~c(t) - f (xt),
where ,f(t) is the right hand derivative of x ( t ) at t. For a given 99 E C, one says that x(t, 99) is a solution o f (4.17) on the interval [0, ot~), ot~ > O, with initial value 99 at t = 0, if x(t, qg) is defined on [ - 6 , c~o), satisfies (4.17) on [0, oqo), xt(., 99) E C for t E [0, ot~) and x0(., 99) = qg. Using the contraction fixed point theorem, one shows that, for any 99 E C, there exists a unique mild solution x (t, 99) defined on a maximal interval [ - 3 , ot~). Moreover, x(t, qg) is continuous in (t, qg), of class C k in ~0 and, for t E (k6, ot~), of class C k in t. If c~0 < +cx~, then Ilxt(', 99)11--+ +cx~ as t --+ ot~0. We assume now that all the solutions of (4.17) are defined for t E [0, +cx~). Then, the one-parameter family of maps S(t), t >~ O, on C defined by S(t)q9 = xt(., ~p) is a continuous semigroup on C. We also introduce the linear semigroup V (t) :C --+ C, t >~ 0, given by (V(t)qg)(O) - ~o(t + O) - cp(O), =0,
t + 0 < O, t+O~O.
(4.18)
The following theorem states the basic qualitative properties of the semigroup S(t) and can be found in [ 116], for example.
946
G. Raugel
THEOREM 4 . 1 3 . If the positive orbits of bounded sets are bounded, then S(t) is a compact map f o r t ~ 6. Moreover, f o r t >~ O, one has (4.19)
S(t)q9 = U(t)q9 4- V(t)qg,
where U(t) is a compact map from X into X f o r t ~ 0 and V(t) has been defined in (4.18). Furthermore, f o r any fl > O, there is an equivalentnorm l . Ion C so that IS(t)~ol ~< exp(-flt)ltpl, t ~ O, and S(t) is an a-contraction in this norm f o r t ~ O. The fact that S(t) can be written as (4.19) had been remarked by Hale and Lopes [102]. The next result is mainly a consequence of Theorems 2.26, 2.38 and 4.13. The analyticity property in the third statement is due to [ 173]. THEOREM 4.14. If the positive orbits of bounded sets are bounded and if S(t) is point dissipative, then: (i) S(t) has a connected compact global attractor A C C; (ii) there is at least an equilibrium point (a constant solution) of(4.17); (iii) if f E C k (C, Rn), k ~ O, (respectively analytic), then any element u of the attractor r is a Ck+l function (respectively analytic); (iv) if f is analytic, then S(t) is one-to-one on A. We now present an example of a gradient system generated by a RFDE, which arises in viscoelasticity [143]. We now let 6 = 1 and suppose that b is a function in C2([-1, 0], R), such that b ( - 1) = 0, b(s) > O, b' (s) >~O, b" (s) >~0 and that b"(00) > 0
(4.20)
for some 00 6 ( - 1,0).
Let g E C l (IR, R) be such that G(x) =
fo Xg ( s ) d s
--+ +cx~
as ix]--+ +cx~.
(4.21)
We consider the equation ~c(t) -- -
/
b(O)g(x(t + 0)) dO.
(4.22)
1
(4.22) is a special case of (4.17) with f(qg) - - f ~ 1 b(O)g(qg(O)) dO. Let S(t) be the local semigroup on C defined by S(t)q9 = xt(., qg), where x(t, qg) is the local solution of (4.22) through 99 at t = 0. To show that the solutions of (4.22) exist globally, one introduces the functional on C --
'/
b' (O)
(f0~
g(~o(s)) ds
)2
dO.
Global attractors in partial differential equations
947
We set Lo (~P) - f0~ g(~P (s)) ds. A short computation shows that, for t ~> 0,
dt(45(S(t)q))) -- - ~
+
b'(-1)[L_,
1
b"(O)[Lo(S(t)qg)] 2dO . (4.23)
The hypotheses on b and g imply that 45(99) --+ + e c as I1~011~ -+-~ and, due to (4.23), that 45(S(t)q)) ~< 45(q9), for t >~ 0. Therefore, the solutions of (4.22) exist globally and the orbits of bounded sets are bounded. The next theorem summarizes the properties of the semigroup S(t) [94,114,99]. THEOREM 4.1 5. Assume that the conditions (4.20) and (4.2 1) hold. Then, the co-limit set
of any orbit is a single equilibrium point. If moreover, the set g of the zeros of g is bounded, the semigroup S(t) generated by (4.22) is a continuous gradient system and admits a compact connected global attractor Abg in C. If in addition, each element of g is hyperbolic, then dim W" (x0) = 1, for any xo ~ g and Abg = ~xo~g Wu (xo). SKETCH
OF T H E P R O O F .
We first observe that any solution x(t) of (4.22) satisfies
Ji(t)+b(O)(g(x(t)))-b'(-1)L_l(xt)+
f
b"(O)Lo(xt)dO.
(4.24)
1
Suppose that 45(S(t)qg) = 45(99), for t ~> 0, then (4.23) and (4.24) imply that the solution x (t) through (p satisfies
s
+ b(O)(g(x(t))) = O,
together with Ls(xt) = 0 for s in some interval I0 containing 00. It follows that ~ is a constant. The boundedness of x(t) implies that x(t) is a constant and thus q9 is a zero of g. Hence 45 is a strict Lyapunov functional. The existence of the compact global attractor A9 b g is a direct consequence of Theorems 4.6 and 4.14. If g(c) --O, the linear variational equation about c is ~(t) -- - f ~ 1 b(s)g'(c)y(t + s)ds and the eigenvalues ~. of the linear variational equation are given by
)~ -- -
f
b(s)g' (c) exp()~s) ds. 1
It is possible to show that the equilibrium point c is hyperbolic if and only if g' (c) # 0. If g' (c) = 0, ~. = 0 is a simple eigenvalue. Property 1) of Remarks 4.3 then implies that the w-limit set of any positive orbit is a singleton. If g'(c) > 0, then c is stable. Finally, one easily shows that, if g' (c) < 0, then c is unstable with dim W" (c) -- 1. D Suppose now that b is a fixed function and consider the global a t t r a c t o r .Abg as a function of the parameter g. Semicontinuity and continuity results of .Abg with respect to g are
G. Raugel
948
proved in [105] and are actually an application of Proposition 4.9 and Theorem 4.11. We have seen that, for each zero c with g'(c) < 0, c is an unstable equilibrium point with dim W"(c) = 1; this means that there are two distinct complete orbits qge(t) and ~e(t) which approach e as t --+ +c~. Since the w-limit set of qge(t) (respectively 7re(t)) is a single equilibrium point e~0 (respectively e 7,), the next problem is to determine if e~o (respectively e~) is smaller or larger than e. If s = {el, e2, e3} with el < e2 < e3, the flow o n J4bg preserves the natural order since r is connected. The case when C -- {el, e2, e3, e4, e5} with el < e2 < e3 < e4 < e5, has been studied by Hale and Rybakowski [114]. To state their result, it is convenient to use the notation j[k, l] to mean that the unstable point ej is connected to ek and et by a trajectory. If g has five simple zeros, then e2, e4 are unstable, while el, e3, e5 are stable. THEOREM 4.16. Let b be fixed. One can realize each of thefollowingflows on J4bg by an appropriate choice of g with five simple zeros:
(i) 2[1, 31, 4[3, 51; (ii) 2[1,4], 4[3, 5]; (iii) 2[1,5], 4[3, 5]; (iv) 2[1, 31, 4[2, 5]; (v) 211, 3], 4[ 1, 5].
4.3. Scalar parabolic equations The simplest and most studied gradient partial differential equation is the semilinear heat or reaction-diffusion equation, which models several physical phenomena like heat conduction, population dynamics, etc. The heat equation belongs to the class of parabolic equations, where smoothing effects take place in finite positive time. Here, we study this equation under very simplified hypotheses on the nonlinearity. Let S2 be a bounded domain in ~n, with Lipschitzian boundary. We consider the following heat equation 0U
O--f(x, t) -- Au(x, t) + f (u(x, t)) + g(x), u(x,t) = 0 , u (x, 0) = u0 (x),
x 9 $2, t > O, x 9 0S2, t > 0, x ~ S2,
(4.25)
where g is in L2(S'2) and f :R ~ R is a locally Lipschitz continuous function. We introduce the operator A -- --AD with domain D(A) - {v E H~(~2) I - A v E LZ(g2)} and set V - H~ (S-2) =_ D(A)1/2. In the case n ~> 2, we assume that the locally Lipschitz continuous function f also satisfies the following growth condition: (A. 1) there exist positive constants Co and or, with (n - 2)or ~< 2 such that If(Yl) - f(Y2)l ~< Co(1 + lyll ~ + lyel~)ly~ - y2l,
Vyl, y2 E IK.
(4.26)
The restriction (n - 2)or ~< 2 has been made only for sake of simplicity. Most of the results of Section 4.3 also hold if (n - 2)or ~< 4 (see Remark 4.18(1) below). The hypothesis
949
Global attractors in partial differential equations
(A. l) together with the Sobolev embeddings properties, allow to define the mapping u V ~ f ( u ) E L2(X2), by ( f ( u ) ) ( x ) = f ( u ( x ) ) , for almost every x 6 X-2. This mapping is Lipschitzian on the bounded sets of V. With the above definitions of A and V, we can rewrite (4.25) as an abstract evolutionary equation in V:
du
t"d( t )
-- - A u ( t ) 4- f (u(t)) + g,
(4.27)
t > O, u(O) -- uo.
Since A is a sectorial operator and f : V --+ L2(.Q) is Lipschitzian on the bounded sets of V, for any r ~> 0, there exists T ---- T ( r ) > 0 such that, for any u0 6 V, with Ilu0llv ~< r, Equation (4.27) has a unique classical solution u E C~ T], V) A C l ((0, T], Lz(.Q)) 71 C~ T], Z)(A)). Later, when we need more regularity on f , we suppose in addition that (A.2) f c Ctl~(IK, R), f~ is locally HOlder continuous and, if n ~> 2, there exist nonnegative constants C l, ell, ill, such that
If'(Y~) - f ' ( y 2 ) l ~ c~(1 + ly~l ~, + l y 2 1 ~ , ) l y l - y21 ~ , (4.28)
Vyl, Y2 e IR,
where or1 > 0, (or1 + / ~ l ) ( n - 2) ~< 2 if n ~> 2. In this case, f is a C l ' ~ - m a p p i n g from V into L 2 (.Q). REMARK. For sake of simplicity, we have provided the above heat equation with homogeneous Dirichlet boundary conditions. All the assertions of this subsection remain true if we replace them in (4.25) by homogeneous Neumann conditions, in which case V = H1(s Even, much more general boundary conditions may be chosen. Furthermore, we can rei,j=n
0
0
place the Laplacian operator by any second order operator Y-]-i.j=l axi (aij(X)~xj)--[-ao(x), where aij, ao are smooth enough functions of x and the matrix [aij(x)]i,j is symmetric, positive definite, for any x 6 X-2. To obtain global existence of the solutions of (4.27), we need to impose, for example, a dissipation condition. Here we assume that (A.3) there exist constants C2 ~> 0 et # c R such that y f (y) 0 (respectively is analytic) (see [121, Corollary 3.4.6]). Due to the invariance of A, it follows that S(t)IA :t IR w+ S(t)uo ~ V is of class Ck (respectively analytic). Arguing by recursion on k, one deduces from the regularity in time property that, if f ~ Cbk-J(HJ+l (s H j (S-2)), 1 0,
x e aS2, t > 0, (4.50)
= o,
u ( x , O) -
xEI2,
uo(x),
Ou
- z - ( x , O) - v o ( x ) ,
Ot
xEf2,
where V is a positive constant, S2 is a bounded domain in R n, with Lipschitzian boundary. We assume that g belongs to L 2 ( ~ ) and that f : I K -+ IK is a locally Lipschitz continuous function satisfying the assumption (A.1). As in Section 4.3, we introduce the operator A - --AD with domain 79(A) -- {v E H~(I2) [ - A v E L2(S-2)} and the mapping f ' v E V ~-+ f ( v ) ( x ) E LZ(f2) . We write (4.50) as a system of first order dU t- d( t )
-- BU(t) + f*(U(t)) + G,
t > O, U(O) -- Uo,
(4.51)
where
B--
0
-A
-Yl )
f,(U)_( '
0 f(u)
) '
and introduce the Hilbert space X -- V x L2 (;2) -- H i (;2) x L2 (~), equipped with the norm[[U[[ 2 - [ [ V u [ I 2L2 +[Jut[[ 2L2. Since the operator B0 9(u , v) E 79(Bo) w+ (v , -- Au) 6 X is a skew-adjoint operator on X, where 7 9 ( B o ) - 7 9 ( B ) - 79(A) • H~(I2) and that f * :X --+ X is Lipschitz continuous on the bounded sets of X, for any r > 0, there exists T =_ T(r) > 0 such that, for any U0 6 X, with IlU0llx ~< r, Equation (4.51) has a unique mild (or integral) solution U E C ~ T], X). If moreover U0 E 79(B), then U E C o ( [ - T, T], 79(B)) M C l ( [ - T, T], X) is a classical solution of (4.5 1). We now introduce the functional 4) 6 C~ R) defined by
|
- .((.,
- fs~ ( lv2 (x) + 1
\ lv.(x)l 2 - F(u(x)) - g ( x ) u ( x ) ) dx. /
(4.52)
G. Raugel
960
One easily shows that, if U 6 C~ and
d *(U)- -y dt
T], X) is a solution of (4.51), ~(U(t)) ~ CJ([0, T])
I II2c2'
'v't E [0, T],
(4.53)
which implies that q~ is a strict Lyapunov function for (4.51). One remarks that the set of equilibria $H of (4.51) is given by E'H=ocp • { 0 } - - { ( u , 0 ) ~ X l A D u + f ( u ) + g - - 0 } . If f and F satisfy the assumptions (A.1) and (A.3), we deduce from the property (4.53), by arguing as in (4.33), that all the solutions of (4.51) are global and the orbits of bounded sets are bounded. If, for any U0 E X, we let S(t)Uo denote the solution U(t) of (4.51), we have defined a continuous gradient system S(t) on X. In addition, the mapping (t, U0) w-> S(t)Uo belongs to C~ +oo) x X, X). In 1979, Webb has proved that each positive orbit V+ (U0) is relatively compact in X, by using the variation of constants formula and the arguments leading to the proof of Remark 2.33 (see [207,208]). Actually, under the assumptions (A. 1) and (A.3), the semigroup S(t) has a compact global attractor ,4. In the non critical case, that is, under the additional assumption (n - 2)or < 2 when n ~> 3, the existence of a compact global attractor has been proved, in 1985, independently by Hale [93] and Haraux [ 117] (see also [85]). In his proof, Hale showed that the assumptions of Remark 2.33 are satisfied, whereas Haraux proved that the complete orbits belong to a more regular space than X, when the domain I2 is more regular. One notices that the proof of Hale does not require regularity of the domain and also works for more general operators than the Laplacian, with less regular coefficients. In the critical case (n - 2)or -- 2 when n ~> 3, the existence of a compact global attractor has been first given by Babin and Vishik [ 13] under an additional assumption on f and later by Arrieta et al. [5] in the general case. Another proof using functionals has been outlined by Ball [ 14]. Here, we give a sketch of these proofs and explain their comparative advantages. We begin with two preliminaries remarks. From the assumption (A. 1), we at once deduce that
II/r
,.
ot+l
co(ll, ll , + llull,,,~ + II/r I,.,).
(4.54)
If t"2 is a bounded domain in IR" with Lipschitzian boundary, the embedding from H I(,Q) into L2(~+l)(,f2) is compact, if n = 1, 2 or if n ~> 3 and (n - 2)or < 2, which implies that f * :X ~ X is a compact map. We also recall that the operator B is the infinitesimal generator of a linear C~ e t 8. Using adequate functionals as below or spectral arguments, one shows that there exist positive constants c l and c2 such that
]e'sllL~X,X) ~ c~ e x p ( - c 2 v t ) ,
t ~ 0.
The next theorem of existence of a compact global attractor is fundamental.
(4.55)
Global attractors in partial differential equations
961
THEOREM 4.3 1. Assume that the assumptions (A.1) and (A.3) hold. Then, the semigroup S(t) generated by (4.51) has a compact connected global attractor A c X, given by A =
w"(Cp x {0}).
Furthermore, if the domain U2 is either convex or of class C 1"1, and if the additional assumption (A.2) holds, then fit is compact in X2 = (H2(~2) N V) x V and is the global attractor of S(t) restricted to X2. PROOF. Since S(t) is a gradient system, whose set gH of equilibrium points is bounded in X, and since the orbits of bounded sets are bounded, we may deduce the existence of a compact global attractor from Theorem 4.6, as soon as we have shown that S(t) is asymptotically smooth. We shall present three different proofs of this property. (1) Since S(t)Uo = U(t) is a mild solution of (4.51), one can write
S(t)Uo --etBUo +
e ( ' - s ) B ( f * ( S ( s ) U o ) + G)ds.
(4.56)
If n -- 1, 2 or if n ~> 3 and (n - 2)or < 2, we deduce from (4.54), (4.55) and (4.56) that S(t) satisfies the hypotheses of Remark 2.33. Hence S(t) is asymptotically smooth and has a compact global attractor A in X. As f is actually a bounded map from V into H ~($2), for some positive s, one can either use a "bootstrap" argument (see [ 117]) or apply Theorem 3.18 or Theorem 3.20 to show that, under the additional smoothness assumptions on f and 12, the global attractor A is bounded in X2. (2) In the case n ~> 3 and (n - 2)or -- 2, the mapping f * ' X --+ X is no longer compact and a more complicated argument is needed. We first present the functional argument of [14]. To this end, we introduce the space Y -- L2(S2) x V'. One easily checks that S(t) is continuous on the bounded subsets of X for the topology of Y and that, for any bounded set/3 c X, the orbit 9/+ (13) is relatively compact in Y. We set, for any U c X,
Eo(U) --
/.(',
-~u + uv
F ( U ) -- v E o ( U ) + 2 r
)
dx, (4.57)
= Ilvll2C' + IlVull~, + ~-0(U).
A simple computation and a density argument imply
dF(U(t)) dt
@ y.~(U(t))
(4.58)
-- .)E"l (U (t )),
where U (t) - S (t) U0 and
F I ( U ) --
fa( --2•
+ y
v + g f (u)u - 2g F(u) - ggu
)
dx.
(4.59)
Integrating (4.58), we obtain the equality (2.21) of Proposition 2.35. Clearly, the functionals .To and .TI are bounded on the bounded sets of X and continuous on the bounded sets of X for the topology of Y, not only in the case (n - 2)or ~ 1, denote the eigenvalues of the operator - A + D f (e), then the eigenvalues of the operator B + (Df(e))* ~ L(X, X) are given by +
#j
1
if V 2 + 41j(e) ) 0,
-~ ( - ? , -i- i
2
if g 2 +
41j (e)
(4.66) < 0.
Thus, if all the equilibrium points (e, 0) are hyperbolic, Theorem 4.6 and Theorem 4.8 imply that
A - U w~'(ej ), ej cEp
and the Hausdorff dimension dim11 (A) is equal to maxeege ind(e). Moreover, the unstable and stable manifolds W ~ ((e, 0), S(t)) and W ~((e, 0), S(t)) are embedded C l-submanifolds of X of dimension ind(e) and codimension ind(e), respectively. In general, one does not know if the stable and unstable manifolds intersect transversally, even when X-2 is an interval of R. As in the parabolic case, we can replace the function f (.) by a function f (x, .) depending on the spatial variable x ~ s If one assumes that the conditions (A.1), (A.2) and (A.3) hold uniformly in x, then the semigroup S(t) still admits a compact global attractor A. Generalizing the proof of [25] to the damped wave equation, one shows that (4.51) is a Morse-Smale system, generically in the pair of parameters (V, f ( x , .)) (see [27]). Unfortunately, even in the one-dimensional case, the orbit structure on A is not really known. Indeed, unlike the parabolic case, arguments using the zero number are not applicable. At this time, no good tools seem to be available. Till now, we do not know, for instance, if A can be written as a graph, nor if it is contained in a Lipschitzian manifold. Moreover, one does not expect that the stable and unstable manifolds intersect transversally for all the values of g. However, if s C IR, we deduce from the Sturm Liouville theorem and from (4.66) that all the eigenvalues of B + ( D f ( e ) ) * , e c gp, are simple, which, together with Remarks 4.3, implies that all the orbits of (4.51) are convergent [108]. Furthermore, if n = 1 and f ( u ) = #2(au - bu 3) for example, the bifurcation diagram for the global attractor Au with respect to the parameter # is essentially the same as the one given by Chafee-Infante for the corresponding parabolic equation [208]. In the case n ~> 1, all the orbits of (4.51) are still convergent if f : R --+ IR is an analytic function [ 120]. However, one expects that the flow on the global attractor A for g > 0 very large is equivalent to the flow on the global attractor of the corresponding parabolic equation, when this system is Morse-Smale. This is the case, indeed. To prove it, it is easier to consider the rescaled wave equation
02u e Ou ~ Ot2 (x,t) + - ~ ( x , t )
-
A u e ( x , t ) + f ( u e ( x , t ) ) + g(x),
u ~(x, t) = O,
x ~ 0s
Ou C u ~(x, O) -
uo(x),
x E ~2, t > 0 ,
-7-(x,
ot
O) - v o ( x ) ,
XE,Q,
t > 0, (4.67)
966
G. Raugel
where e = ],,-2 > 0. The formal limit of (4.67) is the parabolic equation (4.25). Hereafter, we denote by Se(t) the continuous semigroup generated on X by (4.67) and by ,Ae the global attractor of Se (t). We let Sp (t) be the semigroup on V, defined by Equation (4.25) and denote by Ap the global attractor of Sp (t) on V. To compare the attractors JtE and A e , we introduce the set A0 - {(u, v) e X l u e A p , v - A u + f (u) + g}, which is bounded in X. If S-2 is either convex or of class C 1, l, A0 is also bounded in X2. Beginning with the papers of Zlamal [215,216] on the telegrapher's equation eutt .q_ U et Uxxe -- O, the dependence in e of (4.67) has been extensively analysed (see [11,104,106,167 130,211,188]). At first glance, (4.67) appears as a singular perturbation of Equation (4.25). Actually, it is not the case, if we compare adequate time-r maps instead of comparing the continuous semigroups. For any (u0, v0) ~ X, we write the solution u e (t) of (4.67) as u e - - u e 1 +- U2' e w h e r e u e1a n d Ue2 are the solutions of 8U ltt -~- U ~It -+- AUel -- O,
(o),
- (o, vo),
(u ~2 (0), U~,) (0) -- (U0, 0).
8u e e Au~ 2tt + u2t + -- f ( ue) + g
(4.68)
Using a priori estimates on (u ~1, Ult)(t) and comparing (u~, u~t)(t ) with (u(t), ut(t)), where u(t) - Sp(t)uo, we obtain the following result [189,164]: LEMMA 4.34. There exist a positive constant eo and, f o r any r > O, a positive number C(r), such that, f o r 0 ~ e 0 a fixed number, we introduce the Cl-mapping Se - Se(r) from X into X, for e ~> 0. Lemma 4.34 and its analogue for the linearized semigroups DSe(t) and DSo(t)
967
Global attractors in partial differential equations
imply that Sc converges to So in a C l-sense, when e goes to 0. In particular, there exists a positive constant Co(r, r) depending only on r and r so that, if II(u0, v0)II x ~< r,
I
So(.o.
LI + IIDS (.o.
~O,
(4.73)
then the semigroup S(t) is asymptotically smooth and has a minimal global B-attractor A x . If in addition, S(t) is point dissipative, then A x is the compact global attractor of S(t). To apply Proposition 4.37, one must first obtain conditions that will imply that the linear semigroup e Bt satisfies (4.73). If y(xo) > 0 at some point x0 ~ S2, then each solution e Bt Uo approaches zero as t --+ +cx~ (see [126,50]). However, as remarked by Dafermos [50], one can construct examples, for n ~> 2, where the approach to zero is not uniform with respect to initial data in a ball and so (4.73) is not satisfied. Using geometric optics arguments,
969
Global attractors in partial differential equations
Bardos et al. [17] have shown that, if I2 and g are of class C ~ the property (4.73) holds if the following condition is satisfied: (BLR) There exists r > 0 such that every ray o f geometric optics intersects the set s(g) x (0, r), where s(V) is the support o f g. The condition (BLR) is true in particular if s(y) is a neighbourhood of 0S-2. Condition (BLR) gives a very interesting way to verify (4.73). However, the question of characterizing, for a particular domain, the minimal conditions on the damping y for which (BLR) holds, is not easy. If I C 12
are two intervals of R,
g (x) ~> O, Vx 9 f2,
(4.74)
V (x) > O, 'v'x 9 I,
then (4.73) holds. It remains to derive conditions on y(x), which will imply that S(t) is point dissipative. From (4.72), we deduce that, for any U0 9 X, co(U0) must be a subset of the bounded complete orbits of the system ut,(x, t) -- A u ( x , t) -- f (u(x, t)) + g ( x ) ,
x
9I 2 \ s ( y ) ,
t
9R,
Ut(X, t) = O,
x E s(y), t EIR,
u ( x , t ) = O,
x E OS-2, t E IR.
(4.75)
We now distinguish the cases n = 1 and n ~> 2. If n = 1, using the classical representation formula of the solution of a wave equation, we show that, if the condition (4.74) holds, any bounded complete orbit of (4.75) is an equilibrium point of (4.51). Thus, in this case, Proposition 4.37 implies that (4.51) has a compact global attractor ([ 110]). Moreover, one shows that the orbits of (4.51) are convergent (see [ 110] and [ 187] for further examples of convergence in locally damped wave equations). If n ~> 2, we remark that, for any bounded complete orbit ( u ( t ) , u t ( t ) ) of (4.75), D f ( u ( t ) ) belongs to C~ L"(X2)) and w -- ut 9 C~(R, V') n C~ L2(S-2)) is a solution of the system w , , ( x , t) - A w ( x , t) - D f (u(x, t ) ) w ( x , t) -- O, w ( x , t) = wt (x, t) = O,
x 9
t 9
x 9 s(v), t 9
(4.76)
If the only solution w(t) 9 C~ (IR, V') O C~ L2(I-2)) of (4.76) is w -- 0, then the co-limit set of any solution of (4.51) is an equilibrium point. We are thus led to the following unique continuation property (u.c.p.): (u.c.p.) Assume that w is a weak L2(s x (0, T)) solution of the equation w t t - A w + b(x,t)w=O in s x (0, T) where T > diamI2 and b 9 L ~ ((O, T), L" (S2)). Then, if w vanishes in some set O x (0, T), O C s w must be identically zero. Ruiz [192] has shown that the (u.c.p.) property holds when O is a neighbourhood of 0S2.
970
G. Raugel
It follows from the above discussion and from Proposition 4.37 that, if OS2 C s(F) and (n - 2)or < 2, then the semigroup S(t) has a compact global attractor in X. Feireisl and Zuazua [61] have generalized this existence result to the critical case (n - 2)or = 2. In their proof, they have used energy functionals arguments to show that S(t) is bounded dissipative and the same splitting as in Part 3 of the proof of Theorem 4.31 to show that S(t) is asymptotically smooth. We thus can state the following result (see also [113]): THEOREM 4.38. Assume that S-2 is a bounded regular domain in ~n. If the hypotheses (A.1), (A.2), (A.3) are satisfied and if either the conditions n = 1 and (4.74), or s(y) is a neighbourhood of 0S-2, then (4.51) has a connected compact global attractor A = W" (s x {0}) in X. Moreover, the time and spatial regularity properties of the complete orbits in A, given in Theorem 4.3.3 still hold and the property of finite number of determining modes remains true. Finally, we note that many other well-known dissipative gradient systems, having a compact global attractor, could have been approached. Among them, we quote the strongly damped wave equation (see Remark 4.36), the Cahn-Hilliard equation (see [202] and the references therein), nonlinear diffusion systems [94] etc.
5. Further topics So far, we have mainly studied equations, which have a gradient structure. The most famous and most studied non gradient dissipative system arising in PDE's is certainly the one generated by the Navier-Stokes equations on a bounded domain in space dimension two or three. As already shown by Ladyzenskaya in 1972 [ 133,134], in space dimension two, this equation has a compact global attractor, which is of finite fractal dimension [ 147,74,135]. The associated semi-flow is a smooth function of the time variable for t > 0 (up to analyticity) and the global attractor is composed of smooth functions in the spatial variable (see [74,75,62,202] and the references therein). Estimates of the fractal and Hausdorff dimensions of the attractor in terms of various physical parameters have been extensively studied (see [8,44,45,137,55,128]). In the two-dimensional case, the Navier-Stokes equations have also the property of finite number of determining modes (see [72,133,138,41]). For further details and study on the Navier-Stokes equations, we refer to [ 18] in this volume. Among the well-known evolutionary partial differential equations, which have smoothing properties in finite positive time and admit a compact global attractor, we should also mention the one-dimensional Kuramoto-Sivashinsky equation (see [169,43] for example), modeling pattern formation in thermohydraulics and also the propagation of a front flame, as well as the complex Ginzburg-Landau equation in space dimensions one or two, describing the finite amplitude evolution of instability waves. The complex Ginzburg-Landau equation is actually a strongly damped Schr6dinger equation; in space dimensions one or two, it admits a compact global attractor of finite fractal dimension [83,202]. To conclude this paper, we present the weakly damped Schr6dinger equation, which is a system generated by a dispersive equation with weak damping.
Global attractors in partial differential equations
971
A weakly damped Schr6dinger equation. In what follows, s denotes, either the whole space IR", n - 1, 2 or 3, or a bounded C2-polygonal domain in R n, when n - 1, 2. For y > 0 a fixed constant, f a function in L 2 (~Q) and g 6 C 1([0, + e c ) , R) a function satisfying the hypotheses (H. 1) and (H.2) below, we consider the weakly damped Schr6dinger equation, which arises in plasma physics or in optical fibers models (see [170], for instance): in s x (0, + o c ) ,
iut + Au + g(lul2)u + igu -- f,
in s
u(O) -- uo,
(5.1)
If s 7~ R", we associate homogeneous Dirichlet boundary conditions to (5.1) u -- 0,
on 0s
(5.2)
Of course, we could consider homogeneous Neumann boundary conditions or periodic conditions as well. We assume that g 6 C l ([0, +cx~), R) and G(y) - fo' g(s) ds satisfy the following conditions: (H. 1) there exist two constants Cl > 0 and oeI E [0, 2 / n ) such that
G(y) 0, d Ilu(t) II2. a7 d
+
2 2y Ilu 0,
9 (S(t)uo) - e x p ( - 2 y t ) ~ ( u o )
+ 2y
f0t e2•
Vu0 E V. (5.9)
Global attractors in partial differential equations
973
From the hypotheses (H. 1), (H.2) and from the equalities (5.8), one deduces that r > 0 can be chosen so that the ball By (0, r) is positively invariant under S(t) and is an absorbing set for the semigroup S(t). The above properties lead to the following result. THEOREM 5.2. (1) Under the hypotheses (H.1), (H.2) and (H.3), the semigroup S(t) has a connected,
compact global attractor ,4 in V. (2) Suppose that the condition (H.4) holds. If S-2 is either the whole space R n, n -- 1, 2, or a bounded interval of R, the global attractor A of (5.1) and (5.2) is compact in H2($2). Moreover, in the one-dimensional case, for any uo E A, the mapping t E R w-~ S(t)uo is ofclass Ck, for any k ~ 0 (respectively analytic i f g is analytic). l f in addition, f E Hk(l-2), then A is bounded in Hk+2(S2). PROOF. (1) The first statement is a direct consequence of Theorem 2.26, Proposition 2.20, if we show that S(t) is asymptotically smooth in V. Since the mapping S(t), for t ~> 0, and the functionals 450 and q/ are continuous on the bounded sets of V for the topology of H, we apply Proposition 2.35 with X = V, Y -- H, F0 = q~0, F l ( v ) = 2yq/(v) + 2 fs~ Im (fV) dx. If 1-2 is a bounded domain in •", n = 1,2, the condition (ii) of Proposition 2.35 is clearly satisfied, since the Sobolev imbedding HI(S2) ~ L 2 (S2) is compact. When 1-2 = R", n = 1, 2 or 3, the condition (ii) is proved in [142, Lemmas 2 . 6 , 2 . 7 , 2.8], by using a splitting of the solutions like in [58,59]. (2) The first part of the proof does not indicate if the compact global attractor is bounded or compact in a more regular space. When the hypothesis (H.4) holds, the boundedness of A in H2(I2) is shown by Goubet in [87] and [88], by using a splitting of S(t)u into a low wavenumber part Pu(S(t)u) and a high wavenumber part QN(S(t)u). The low wavenumber part is obviously smooth and the high wavenumber part can be approximated asymptotically by the solution of an equation with zero initial data. The compactness in H2(S2) then follows from the fact that A is a bounded invariant set in H2(S-2) and thus in contained in the compact global attractor of S(t) in H 2 ( ~ ) . When S-2 is bounded interval of R, the boundedness of A in Hk+2(I2) is proved in the same way in [87]. The Ck-regularity (respectively the analyticity) of the map t ~ R w+ S(t)uo, for any k ~> 0 and any u0 E A, is shown in [ 113] as a consequence of a generalized version of Theorems 3.18 and 3.19. D REMARKS. (1) In the one-dimensional case, under a relaxed version of the hypothesis (H.4), the system generated by (5.1) and (5.2) has the property of finite number of determining modes (see [ 17 6,77,113 ] ). (2) In the one-dimensional case, the global attractor of Equation (5.1) with periodic boundary conditions is regular in the same Gevrey class as g and f and thus is analytic in the spatial variable (see [176,113]). (3) Goubet [89] has also proved the compactness of the global attractor of Equation (5.1) with periodic boundary conditions in the two-dimensional case. There the proof is more involved and uses spaces introduced by Bourgain.
974
G. Raugel
(4) From [80, Theorem 3.2 and Remark 3.1 ], it follows that in the one-dimensional case, ,t4 has finite fractal dimension. Adapting these proofs, one can certainly show that, in the other cases, r has also finite fractal dimension. Finally, we notice that the existence and regularity of the compact global attractor for other weakly damped dispersive equations like the weakly damped KdV and Zakharov equations are proved by using similar methods (see [91,166,90]).
Acknowledgements I am indebted to Th. Gallay, O. Goubet and E. Titi for their helpful suggestions. I especially express my gratitude to Jack Hale, who introduced me into the field of dynamical systems and over the years did not spare his time to discuss with me and answer my numerous questions. I also thank him for the advices and comments on this manuscript. Finally my thanks go to Bernold Fiedler, who gave me the opportunity to write this text.
References [1] M. Abounouh, Comportement asymptotique de certaines ~quations aux d~riv~es partielles dissipatives, Thesis, Universit6 de Paris-Sud, Orsay (1993). [2] M. Abounouh, Asymptotic behaviour for a weakly damped SchrOdinger equation in dimension two, Appl. Math. Lett. 6 (1993), 29-32. [3] S.B. Angenent, The Morse-Smale property for a semilinear parabolic equation, J. Differential Equations 62 (1986), 427-442. [4] S.B. Angenent and B. Fiedler, The dynamics of rotating waves in scalar reaction diffusion equations, Trans. Amer. Math. Soc. 307 (1988), 545-568. [5] J. Arrieta, A. Carvalho and J.K. Hale, A damped hyperbolic equation with critical exponent, Comm. PDE 17 (1992), 841-866. [6] J. Auslander, N.P. Bhatia and N. Seibert, Attractors in dynamical systems, Bol. Soc. Mat. Mex. 9 (1964), 55-66. [7] A.V. Babin and S.Y. Pilyugin, Continuous dependence of attractors on the shape of domain, Boundary Value Problems of Mathematical Physics and Adjacent Problems of Function Theory, Vol. 26, Work collection dedicated to N.N. Ural'tseva on her anniversary, O.A. Ladyzhenskaya, ed., Nauka, Sankt-Peterburg; Zap. Nauchn. Semin. POM1221 (1995), 58-66. [8] A.V. Babin and M.I. Vishik, Regular attractors of semigroups and evolution equations, J. Math. Pures Appl. 62 (1983), 441-491. [9] A.V. Babin and M.I. Vishik, On the stationary curves and unstable invariant manifolds in the neighborhood of critical points of evolution equations depending on a parameter, Soviet Math. Dokl. 31 (1985), 10-14 (English; Russian original). [ 10] A.V. Babin and M.I. Vishik, Unstable invariant sets of semigroups of non-linear operators and their perturbations, Russian Math. Surveys 41 (1986), 1-41 (English; Russian original). [ 11 ] A.V. Babin and M.I. Vishik, Uniform asymptotic solutions of a singularly perturbed evolutionary equation, Uspekhi Mat. Nauk 42 (1987), 231-232 (in Russian). [ 12] A.V. Babin and M.I. Vishik, Uniform finite-parameter asymptotics of solutions of nonlinear evolutionary equations, J. Math. Pures Appl. 68 (1989), 399-455. [ 13] A.V. Babin and M.I. Vishik, Attractors of Evolutionary Equations, North-Holland, Amsterdam (1989). [14] J.M. Ball, Attractors of damped wave equations, Conference at Oberwolfach (Germany) (1992).
Global attractors in partial differential equations
975
[15] J.M. Ball, Continuity properties and global attractors of generalized semiflows and the Navier-Stokes equations, J. Nonlinear Sci. 7 (1997), 475-502. [16] J.M. Ball, Erratum." "Continuity properties and global attractors of generalized semiflows and the NavierStokes equations" J. Nonlinear Sci. 8 (1998), 233. [ 17] C. Bardos, G. Lebeau and J. Rauch, Sharp sufficient conditions for the observation, control, and stabilization of waves from the boundao', SIAM J. Control Optimization 30 (1992), 1024-1065. [ 18] C. Bardos and B. Nicolaenko, Navier-Stokes equations and dynamical systems, Handbook for Dynamical Systems, Vol. 2, B. Fiedler, ed., Elsevier, Amsterdam (2002), 503-597. [19] C. Bardos and L. Tartar, Sur l'unicit~ r~trograde des ~quations paraboliques et quelques ~quations voisines, Arch. Rational Mech. Anal. 50 (1973), 10-25. [20] N.E Bhatia and O. Hajek, Local Semi-Dynamical Systems, Lecture Notes in Math., Vol. 90, Springer, Berlin (1969). [21] J.E. Billotti and J.P. LaSalle, Dissipative periodic processes, Bull. Amer. Math. Soc. 77 (1971), 10821088. [22] P. Brunovsk3), The attractor of the scalar reaction-diffusion equation is a smooth graph, J. Dynamics Differential Equations 2 (1990), 293-323. [23] E Brunovsk~ and S.-N. Chow, Generic properties of stationary state solutions of reaction-diffusion equations, J. Differential Equations 53 (1984), 1-23. [24] P. Brunovsk3) and B. Fiedler, Connecting orbits in scalar reaction diffusion equations. II: The complete solution, J. Differential Equations 81 (1989), 106-135. [25] P. Brunovsk~, and P. Polfi~ik, The Morse-Smale structure of a generic reaction-diffusion equation in higher space dimension, J. Differential Equations 135 (1997), 129-181. [26] P. Brunovsk~ and P. Polfi~ik, On the local structure of co-limit sets of maps, Z. Angew. Math. Phys. 48 (1997), 976-986. [27] P. Brunovsk~ and G. Raugel, The Morse-Smale structure of a generic damped wave equation (1999) (in preparation). [28] Th. Cazenave and A. Haraux, Inovduction aux Problbmes d'Evolution Semi-lin~aires, Math6matiques et Applications, Vol. 1, Ellipses (1990). [29] S. Ceron and O. Lopes, or-contractions and attractors for dissipative semilinear hyperbolic equations and systems, Ann. Mat. Pura Appl. IV. Ser. 160 (1991), 193-206. [30] N. Chafee and E.F. Infante, A bifurcation problem for a nonlinear parabolic equation, Appl. Anal. 4 (1974), 17-37. [31] M. Chen, X.-Y. Chen and J.K. Hale, Structural stability for time periodic one dimensional parabolic equations, J. Differential Equations 96 (1992), 355-418. [32] X.-Y. Chen, A strong unique continuation theorem for parabolic equations, Math. Ann. 311 (1998), 603630. [33] X.-Y. Chen, J.K. Hale and B. Tan, Invariantfoliationsfor C i semigroups in Banach spaces, J. Differential Equations 139 (1997), 283-318. [34] V.V. Chepyzhov and M.I. Vishik, Attractors of nonautonomous dynamical systems and their dimension, J. Math. Pures Appl. 73 (1994), 279-333. [35] V.V. Chepyzhov and M.I. Vishik, Attractors for equations of mathematical physics, Preprint (2000). [36] P. Chernoff, A note ofcontinui~' ofsemigroups ofmaps, Proc. Amer. Math. Soc. 53 (1975), 318-320. [37] P. Chernoff and J. Marsden, On continui~' and smoothness of group actions, Bull. Amer. Math. Soc. 76 (1970), 1044-1049. [38] J.W. Cholewa and J.K. Hale, Some counterexamples in dissipative systems, Dynamics of Continuous, Discrete and Impulsive Systems 7 (2000), 159-176. [39] S.-N. Chow and K. Lu, Invariant manifolds for flows in Banach spaces, J. Differential Equations 74 (1988), 285-317. [40] I. Chueshov, Theory of functionals that uniquely determine the asymptotic dynamics of infinitedimensional dissipative systems, Russian Math. Surveys 53 (1998), 731-776; Translation from: Uspekhi Mat. Nauk 53 (1998), 77-124. [41 ] B. Cockburn, D. Jones and E. Titi, Estimating the number of asymptotic degrees of freedom for nonlinear dissipative systems, Math. Comput. 66 (1997), 1073-1087. [42] E. Coddington and N. Levinson, Theo~ of Ordinary, Differential Equations, McGraw-Hill, New York (1955).
976
G. Raugel
[43] E Collet, J.-E Eckmann, H. Epstein and J. Stubbe, A global attracting set for the Kuramoto-Sivashinsky equation, Comm. Math. Phys. 152 (1993), 203-214. [44] E Constantin and C. Foias, Global Lyapunov exponents, Kaplan-Yorke formulas and the dimension of the attractors for 2D Navier-Stokes equations, Comm. Pure Appl. Math. 38 (1985), 1-27. [45] E Constantin, C. Foias and R. Temam, Attractors Representing Turbulent Flows, Amer. Math. Soc. Mem., Vol. 53 (1985). [46] C. Conley, Isolated Invariant Sets and the Morse Index, CBSM Regional Conf. Ser. in Math., Vol. 38 (1978). [47] G. Cooperman, or-condensing maps and dissipative systems, Ph.D. thesis, Brown University, Providence, RI (1978). [48] H. Crauel and E Flandoli, Attractors for random dynamical systems, Probab. Theory Related Fields 100 (1994), 365-393. [49] C. Dafermos, Semiflows generated by compact and uniform processes, Math. Systems Theory 8 (1975), 142-149. [50] C. Dafermos, Asymptotic behavior of solutions of evolution equations, Nonlinear Evolution Equations, Proc. Symp. (Madison, WI, 1977) (1978), 103-123. [51] A. Debussche, HausdorffDimension of a random invariant set, J. Math. Pures Appl. 77 (1998), 967-988. [52] K. Deimling, Nonlinear Functional Analysis, Springer, Berlin (1985). [53] J. Dorroh, Semi-groups of maps in a locally compact space, Canad. J. Math. 19 (1967), 688-696. [54] A. Douady and J. Oesterl6, Dimension de Hausdorff des attracteurs, C. R. Acad. Sci. Paris 290 (1980), 1135-1138. [55] A. Eden, C. Foias and R. Temam, Local and global Lyapunov exponents, J. Dynamics Differential Equations 3 (1991), 133-177. [56] A. Eden, C. Foias, B. Nicolaenko and R. Temam, Exponential Attractors for Dissipative Evolution Equations, RAM, Vol. 37, Masson, Paris (1994). [57] H. Fan and J.K. Hale, Attractors in inhomogeneous conservation laws and parabolic regularizations, Trans. Amer. Math. Soc. 347 (1995), 1239-1254. [58] E. Feireisl, Attractors for semilinear damped wave equations on R 3, Nonlinear Anal., Theory, Methods Appl. 23 (1994), 187-195. [59] E. Feireisl, Asymptotic behaviour and attractors for a semilinear damped wave equation with supercritical exponent, Proc. Roy. Soc. Edinburgh Sect. A 125 (1995), 1051-1062. [60] E. Feireisl, Bounded, locally compact global attractors for semilinear damped wave equations on R N, J. Differential Integral Equations 9 (1996), 1147-1156. [61] E. Feireisl and E. Zuazua, Global attractors for semilinear wave equations with locally distributed nonlinear damping and critical exponent, Comm. Partial Differential Equations 18 (1993), 1539-1555. [62] A. Ferrari and E. Titi, Gevrey regularity for nonlinear analytic parabolic equations, Comm. Partial Differential Equations 23 (1998), 1-16. [63] B. Fiedler, Global attractors of one-dimensional parabolic equations: Sixteen examples, Tatra Mt. Math. Publ. 4 (1994), 67-92. [64] B. Fiedler, Do global attractors depend on boundary conditions?, Doc. Math. J. DMV 1 (1996), 215-228. [65] B. Fiedler and J. Mallet-Paret, A Poincar~-Bendixson theorem for scalar reaction diffusion equations, Arch. Rational Mech. Anal. 107 (1989), 325-345. [66] B. Fiedler and E Pol~i6ik, Complicated dynamics of scalar reaction diffusion equations with a nonlocal term, Proc. Roy. Soc. Edinburgh Sect. A 115 (1990), 167-192. [67] B. Fiedler and C. Rocha, Heteroclinic orbits of semilinear parabolic equations, J. Differential Equations 125 (1996), 239-281. [68] B. Fiedler and C. Rocha, Orbit equivalence of global attractors of semilinear parabolic differential equations, Trans. Amer. Math. Soc. 352 (2000), 257-284. [69] W. Fitzgibbon, Strongly damped quasilinear evolution equations, J. Math. Anal. Appl. 79 (1981), 536550. [70] C. Foias, O. Manley, R. Temam and Y. Treve, Asymptotic analysis of the Navier-Stokes equations, Phys. D 9 (1983), 157-188. [71] C. Foias and E.J. Olson, Finite fractal dimension and HOlder-Lipschitz parametrization, Indiana Univ. Math. J. 45 (1996), 603-616.
Global attractors in partial differential equations
977
[72] C. Foias and G. Prodi, Sur le comportement global des solutions non stationnaires des ~quations de Navier-Stokes en dimension deux, Rend. Sem. Mat. Univ. Padova 39 (1967), 1-34. [73] C. Foias, G. Sell and R. Temam, Inertial manifolds for nonlinear evolutionao, equations, J. Differential Equations 73 (1988), 309-353. [74] C. Foias and R. Temam, Some analytic and geometric properties of the solutions of the evolution NavierStokes equations, J. Math. Pures Appl. 9 (1979), 339-368. [75] C. Foias and R. Temam, Gevrey class regulari~ for the solutions of the Navier-Stokes equations, J. Funct. Anal. 87 (1989), 359-369. [76] G. Fusco and C. Rocha, A permutation related to the dynamics of a scalar parabolic PDE, J. Differential Equations 91 (1991), 111-137. [77] Th. Gallay and G. Raugel, Stabilit~ locale et globale, Cours de troisi~me cycle de l'Universit6 d'Orsay (2000) (in preparation). [78] V.M. Gerstein and M.A. Krasnosel'skij, Structure of the set of solutions of dissipative equations, Dokl. Akad. Nauk SSSR 183 (1968), 267-269. [79] J.-M. Ghidaglia, Some backward uniqueness results, Nonlinear Anal. TMA 10 (1986), 777-790. [80] J.-M. Ghidaglia, Finite dimensional behavior for weakly damped driven SchrOdinger equations, Ann. Inst. H. Poincar6, Anal. Non Lin6aire 5 (1988), 365-405. [81] J.-M. Ghidaglia, Weakly damped forced Korteweg-de Vries equations behave as a finite dimensional clynamical system in the long time, J. Differential Equations 74 (1988), 369-390. [82] J.-M. Ghidaglia, A note on the strong convergence towards attractors of damped forced KdV equations, J. Differential Equations 110 (1994), 356-359. [83] J.-M. Ghidaglia and B. H6ron, Dimension of the attractors associated to the Ginzburg-Landau partial differential equation, Phys. D 28 (1987), 282-304. [84] J.-M. Ghidaglia and R. Temam, Regulari~ of the solutions of second order evolution equations and their attractors, Ann. Sc. Norm. Super. Pisa C1. Sci., IV 14 (1987), 485-511. [85] J.-M. Ghidaglia and R. Temam, Attractors for damped nonlinear hyperbolic equations, J. Math. Pures Appl. 9 (1987), 273-319. [86] M. Gobbino and M. Sardella, On the connectedness of attractors for dynamical systems J. Differential Equations 133 (1997), 1-14. [87] O. Goubet, Regulari~ of the attractor for a weakly damped nonlinear Schr6dinger equation, Appl. Anal. 60 (1996), 99-119. [88] O. Goubet, Regulari~ of the attractor for the weakly damped nonlinear Schr6dinger equations in ~2, Adv. Differential Equations 3 (1998), 337-360. [89] O. Goubet, Asymptotic smoothing effect for a weakly damped nonlinear SchrOdinger equation in T 2, J. Differential Equations 165 (2000), 96-122. [90] O. Goubet, Asymptotic smoothing effect for weakly damped forced Korteweg-de-Vries equations, Discrete and Continuous Dynamical Systems 6 (2000), 625-644. [91] O. Goubet and I. Moise Attractor for dissipative Zakharov system, Nonlinear Anal. Theory Methods Appl. 31 (1998), 823-847. [92] J.K. Hale, Dynamical systems and stabili~, J. Math. Anal. Appl. 26 (1969), 39-59. [93] J.K. Hale, Asymptotic behaviour and dynamics in infinite dimensions, Research Notes in Mathematics, Vol. 132, Pitman, Boston (1985), 1-41. [94] J.K. Hale, Asymptotic Behavior of Dissipative Systems, Mathematical Surveys and Monographs, Vol. 25, Amer. Math. Soc., Providence, RI (1988). [95] J.K. Hale, Attractors and Dynamics in PDE, NATO Lectures (1995). [96] J.K. Hale, Dynamics of a scalar parabolic equation, Canad. Appl. Math. Quarterly 5 (1997), 209-305. [97] J. K. Hale, Dynamics of numerical approximations, Appl. Math. Comput. 89 (1998), 5-15. [98] J.K. Hale, Dissipation and attractors, International Conference on Differential Equations. Proceedings of the Conference, Equadiff. 99, Berlin, Vol. 1, B. Fiedler et al., eds, World Scientific, Singapore (2000), 622-637. [99] J.K. Hale, Unpublished notes. [100] J.K. Hale, J.E LaSalle and M. Slemrod, Theo~ of a general class of dissipative processes, J. Math. Anal. Appl. 39 (1972), 177-191.
978
G. Raugel
[101] J.K. Hale, X.B. Lin and G. Raugel, Upper semicontinuity of attractors for approximations ofsemigroups and partial differential equations, Math. Comp. 50 (1988), 89-123. [102] J.K. Hale and O. Lopes, Fixed point theorems and dissipative processes, J. Differential Equations 13 (1973), 391-402. [ 103] J.K. Hale, L. Magalhaes and W. Oliva, An Introduction to Infinite Dimensional Dynamical Systems, Appl. Math. Sci., Vol. 47, Springer, Berlin (1984). [104] J.K. Hale and G. Raugel, Upper semicontinuity of the attractor for a singularly perturbed hyperbolic equation, J. Differential Equations 73 (1988), 197-214. [105] J.K. Hale and G. Raugel, Lower semicontinuity of attractors of gradient systems and applications, Ann. Mat. Pura Appl. (IV) CLIV (1989), 281-326. [106] J.K. Hale and G. Raugel, Lower Semicontinuity of the attractor for a singularly perturbed hyperbolic equation, J. Dynamics Differential Equations 2 (1990), 19-67. [ 107] J.K. Hale and G. Raugel, A damped hyperbolic equation on thin domains, Trans. Amer. Math. Soc. 329 (1992), 185-219. [108] J.K. Hale and G. Raugel, Convergence in gradient-like systems, ZAMP 43 (1992), 63-124. [109] J.K. Hale and G. Raugel, Reaction-diffusion equation on thin domains, J. Math. Pures Appl. 71 (1992), 33-95. [110] J.K. Hale and G. Raugel, Attractors for dissipative evolutionary equations, International Conference on Differential Equations, Vols. 1, 2 (Barcelona 1991), World Scientific, River Edge, NJ (1993), 3-22. [ 111] J.K. Hale and G. Raugel, Limits of semigroups depending on parameters, Resenhas 1 (1993), 1-45. [112] J.K. Hale and G. Raugel, A reaction-diffusion equation on a thin L-shaped domain, Proc. Roy. Soc. Edinburgh Sect. A 125 (1995), 283-327. [113] J.K. Hale and G. Raugel, Regularity, determining modes and Galerkin methods, Preprint (2000). [ 114] J.K. Hale and K. Rybakowski, On a gradient-like integro-differential equation, Proc. Roy. Soc. Edinburgh Sect. A 92 (1982), 77-85. [ 115] J.K. Hale and J. Scheurle, Smoothness of bounded solutions of nonlinear evolution equations, J. Differential Equations 56 (1985), 142-163. [116] J.K. Hale and S. Verduyn-Lunel, Introduction to Functional Differential Equations, Appl. Math. Sci., Vol. 99, Springer, Berlin (1993). [ 117] A. Haraux, Two Remarks on dissipative hyperbolic problems, Srminaire du Collbge de France, Vol. 7, Res. Notes Math., Vol. 122, Pitman (1985), 161-179. [ 118] A. Haraux, Systkmes Dynamiques Dissipatifs et Applications, RMA, Vol. 17, Masson, Paris (1991). [119] A. Haraux and M. Kirane, Estimations C 1 pour des problkmes paraboliques semi-lin~aires, Ann. Fac. Sci. Toulouse Math. 5 (1983), 265-280. [ 120] A. Haraux and M. A. Jendoubi, Convergence of bounded weak solutions of the wave equation with dissipation and analytic nonlinearity, Calc. Vat. Partial Differential Equations 9 (1999), 95-124. [121] D. Henry, Geometric Theory of Semilinear Parabolic Equations, Lecture Notes Math., Vol. 840, Springer, Berlin (1981). [122] D. Henry, Perturbations of the boundary for boundary value problems of partial differential equations, Sem. Brazileiro Anal. 22 ATS (1985). [123] D. Henry, Some infinite dimensional Morse-Smale systems defined by parabolic differential equations, J. Differential Equations 59 (1985), 165-205. [124] D. Henry, Generic properties of equilibrium solutions by perturbations of the boundary,, Dynamics of Infinite Dimensional Systems, NATO ASI Ser. F, Vol. 37, Springer, Berlin (1987), 129-139. [125] W. Hurewicz and H. Wallman, Dimension Theory, Princeton Math. Ser., Vol. 4, Princeton Univ. Press, Princeton, NJ (1941). [126] N. Iwasaki, Local decay of solutions for symmetric hyperbolic systems with dissipative and coercive boundary conditions in exterior domains, Publ. Res. Inst. Math. Sci., Kyoto Univ. 5 (1969), 193-218. [127] M. Jolly, Explicit construction of an inertial manifold for a reaction diffusion equation, J. Differential Equations 78 (1989), 220-261. [128] D. Jones and E. Titi, Upper bounds on the number of determining modes, nodes, and volume elements for the Navier-Stokes equations, Indiana Math. J. 42 (1993), 875-887. [ 129] L. Kapitanski, Minimal compact global attractor for a damped wave equation, Comm. Partial Differential Equations 20 (1995), 1303-1323.
Global attractors in partial differential equations
979
[130] I.N. Kostin, A regular approach to a problem on the attractors of singularly perturbed equations, Zap. Nauchn. Semin. Leningr. Otd. Mat. Inst. Steklova 181 (1990), 93-131; English translation: J. Soviet. Math. 62 (1992), 2664-2689. [131] I.N. Kostin, Lower semicontinuity of a non-hyperbolic attractor, J. Lond. Math. Soc., II. 52 (1995), 568582. [132] K. Kuratowski, Topology, Academic Press, New York (1966). [133] O.A. Ladyzhenskaya, A dynamical system generated by the Navier-Stokes equations, Zap. Nauch. Sem. LOM127 (1972), 91-114; English translation: J. Soviet Math. 3 (1975), 458-479. [134] O.A. Ladyzhenskaya, Dynamical system generated by the Navier-Stokes equations, Soviet Phys. Dokl. 17 (1973), 647-649. [ 135] O.A. Ladyzhenskaya, On the finite dimensionality of bounded invariant sets for the Navier-Stokes system and other dissipative systems, Zap. Nauchn. Semin. Leningrad Otd. Mat. Inst. Steklova 115 (1982), 137155; English translation: J. Soviet Math. 28 (1985), 714-726. [136] O. Ladyzhenskaya, Attractors of nonlinear evolution problems with dissipation, Zap. Nauch. Semin. Leningrad Otd. Mat. Inst. Steklova 152 (1986), 72-85. [137] O. Ladyzhenskaya, On the determination of minimal global attractors for the Navier-Stokes and other partial differential equations, Russian Math. Surveys 42 (1987), 27-73. [138] O.A. Ladyzhenskaya, Estimates of the fractal dimension and of the number of deterministic modes for invariant sets of dynamical systems, Zap. Nauchn. Semin. Leningrad Otd. Mat. Inst. Steklova 163 (1987), 105-129; English translation: J. Soviet Math. 49 (1990), 1186-1201. [139] O. Ladyzhenskaya, Some complements and corrections to my papers on the theory of attractors for abstract semigroups, Zap. Nauchn. Semin. Leningrad Otd. Mat. Inst. Steklova 182 (1990), 102-112; English translation: J. Soviet Math. 62 (1992), 2789-2794. [140] O. Ladyzhenskaya, Attractors for Semigroups and Evolution Equations, Cambridge Univ. Press, Cambridge (1991). [141] J.E LaSalle, The Stabili~ of Dynamical Systems, CBMS Regional Conference Ser., Vol. 25, SIAM, Philadelphia, PA (1976). [142] Ph. Lauren~ot, Long-time behaviour for weakly damped driven nonlinear Schr6dinger equations in R N , N ~< 3, NoDEA, Nonlinear Differential Equation Appl. 2 (1995), 357-369. [143] J. Levin and J. Nohel, On a nonlinear delay equation, J. Math. Anal. Appl. 8 (1964), 31-44. [144] N. Levinson, Transformation theory of nonlinear differential equations of the second order, Ann. Math. 45 (1944), 724-737. [145] S. Lojasiewicz, Une propri~t~ topologique des sous-ensembles analytiques r~els, Equations aux D6riv6es Partielles (Paris, 1962), Colloque International du CNRS, Vol. 117 (1963). [146] O. Lopes, Compact attractor for a nonlinear wave equation with critical exponent, Proc. Roy. Soc. Edinburgh 115 (1990), 61-64. [147] J. MaUet-Paret, Negatively invariant sets of compact maps and an extension of a theorem of Cartwright, J. Differential Equations 22 (1976), 331-348. [148] J. Mallet-Paret and G. Sell, Inertial manifolds for reaction diffusion equations, J. Amer. Math. Soc. 1 (1988), 805-866. [149] R. Marl6, On the dimension of the compact invariant sets of certain non-linear maps, Dynamical Systems and Turbulence, Proc. Symp. (Coventry, 1980), Lecture Notes in Math., Vol. 898 (1981), 230-242. [150] E Massatt, Some properties ofu-condensing maps, Ann. Pura Appl. 125 (1980), 101-115. [151] E Massatt, Attractivi~ properties of or-contractions, J. Differential Equations 48 (1983), 326-333. [ 152] E Massatt, Limiting behavior for strongly damped nonlinear wave equations, J. Differential Equations 48 (1983), 334-349. [153] P. Massatt, The convergence of scalar parabolic equations with convection to periodic solutions, Preprint (1986). [ 154] H. Matano, Nonincrease of lap number of a solution for a one-dimensional semilinear parabolic equation, J. Fac. Sci. Univ. Kyoto 30 (1982), 401-441. [155] H. Matano, Asymptotic behavior of solutions of semilinear heat equations on S 1, Nonlinear Diffusion Equations and Their Equilibrium States II, Ni, Peletier and Serrin, eds, Springer, New York (1988), 139162. [156] E Mendelson, On unstable attractors, Bol. Soc. Mat. Mex. 5 (1960), 270-276.
980
G. Raugel
[157] A. Mielke, Exponentially weighted L~-estimates and attractors for parabolic systems on unbounded domains, International Conference on Differential Equations. Proceedings of the Conference, Equadiff. 99, Berlin, Vol. 1, B. Fiedler et al., eds, World Scientific, Singapore (2000), 641-646. [ 158] A. Mielke, The Ginzburg-Landau equation in its role as a modulation equation, Handbook for Dynamical Systems, Vol. 2, B. Fiedler, ed., Elsevier, Amsterdam (2002), 759-834. [159] A. Mielke and G. Schneider, Attractors for modulation equations on unbounded domains - existence and comparison, Nonlinearity 8 (1995), 743-768. [ 160] R.K. Miller, On asymptotic stability of almost periodic systems, J. Differential Equations 1 (1965), 234239. [ 161] R.K. Miller and G. Sell, Topological dynamics and its relation to integral equations and nonautonomous systems, Dynamical Systems, Vol. 1, Academic Press, New York (1976), 223-249. [162] J. Milnor, On the concept of attractors, Commun. Math. Phys. 99 (1985), 177-195, Comments: On the concept of attractor: correction and remarks, Commun. Math. Phys. 102 (1985), 517-519. [163] K. Mischaikow and M. Mrozek, Conley index, Handbook for Dynamical Systems, Vol. 2, B. Fiedler, ed., Elsevier, Amsterdam (2002), 393-460. [164] K. Mischaikow and G. Raugel, Singularly perturbed partial differential equations and stability of the Conley index, Manuscript (2000). [165] H. Movahedi-Lankarani, On the inverse of M a ~ ' s projection, Proc. Amer. Math. Soc. 116 (1992), 555560. [166] I. Moise, R. Rosa and X. Wang, Attractors for non-compact semigroups via energy equations, Nonlinearity 11 (1998), 1369-1393. [ 167] X. Mora and J. Solh-Morales, The singular limit of semilinear damped equations, J. Differential Equations 78 (1989), 262-307. [ 168] K. Nickel, Gestaltaussagen iiber L6sungen parabolischer Differentialgleichungen, J. Reine Angew. Math. 211 (1962), 78-94. [169] B. Nicolaenko, B. Scheurer and R. Temam, Some global dynamical properties of the KuramotoSivashinsky equations: nonlinear stability and attractors, Phys. D 16 (1985), 155-183. [ 170] K. Nozaki and N. Bekki, Low-dimensional chaos in a driven damped nonlinear Schr6dinger equation, Phys. D 21 (1986), 381-393. [171] R. Nussbaum, The radius of the essential spectrum, Duke Math. J. 38 (1970), 473-488. [172] R. Nussbaum, Some asymptotic fixed points, Trans. Amer. Math. Soc. 171 (1972), 349-375. [ 173] R. Nussbaum, Periodic solutions ofanalyticfunctional differential equations are analytic, Michigan Math. J. 20 (1973), 249-255. [ 174] R. Nussbaum, Functional differential equations, Handbook for Dynamical Systems, Vol. 2, B. Fiedler, ed., Elsevier, Amsterdam (2002), 461-499. [ 175] W.M. Oliva, Stability of Morse-Smale maps, Preprint (1982). [176] M. Oliver and E. Titi, Analyticity of the attractor and the number of determining nodes for a weakly damped driven nonlinear SchrOdinger equation, Indiana Univ. Math. J. 47 (1998), 49-73. [ 177] J. Palis, On Morse-Smale dynamical systems, Topology 8 (1969), 385-405. [178] J. Palis and S. Smale, Structural stability theorems, Global Analysis, Proc. Symp. Pure Math., Vol. 14, Amer. Math. Soc., Providence, RI (1970). [179] J. Palis J. and W. de Melo, Geometric Theory of Dynamical Systems, Springer, Berlin (1982). [ 180] A. Pazy, Semigroups of Linear Operators and Applications to Partial Differential Equations, Appl. Math. Sci., Vol. 44, Springer, New York (1983). [ 181 ] V. Pliss, Nonlocal Problems of the Theo~ of Oscillations, Academic Press, New York, XII (1966). [182] P. Pol~6ik, Transversal and nontransversal intersection of stable and unstable manifolds of reaction diffusion equations on symmetric domains, Differential Integral Equations 7 (1994), 1527-1545. [ 183] E Pol~6ik, Parabolic equations: asymptotic behavior and dynamics on invariant manifolds, Handbook for Dynamical Systems, Vol. 2, B. Fiedler, ed., Elsevier, Amsterdam (2002), 835-883. [184] P. Pol~6ik and K. Rybakowski, Nonconvergent bounded trajectories in semilinear heat equations, J. Differential Equations 124 (1996), 472-494. [185] K. Promislow, Time analyticity and Gevrey regularity for solutions of a class of dissipative partial differential equations, Nonlinear Anal. 16 (1991), 959-980. [ 186] W.-X. Qin, Unbounded attractors for maps, Nonlinear Anal., Theory Methods Appl. A 36 (1999), 63-70.
Global attractors in partial differential equations
981
[187] G. Raugel, Dynamics of Partial Differential Equations on Thin Domains, CIME Course, Montecatini Terme, Lecture Notes in Math., Vol. 1609, Springer, Berlin (1995), 208-315. [188] G. Raugel, Singularly perturbed hyperbolic equations revisited, International Conference on Differential Equations. Proceedings of the Conference, Equadiff. 99, Berlin, Vol. 1, B. Fiedler et al., eds, World Scientific, Singapore (2000), 647-652. [ 189] G. Raugel, The damped wave equation and its parabolic limit (2000) (in preparation). [190] J.C. Robinson, Global attractors: topology and finite-dimensional dynamics, J. Dynamics Differential Equations 11 (1999), 557-581. [191] C. Rocha, Properties of the attractor of a scalar parabolic PDE, J. Dynamics Differential Equations 3 (1991), 575-591. [192] A. Ruiz, Unique continuation for weak solutions of the wave equation plus a potential, J. Math. Pures Appl. 71 (1992), 455-467. [193] K.P. Rybakowski, On the homotopy index for infinite-dimensional semi-flows, TAMS 269 (1982), 351383. [194] K.E Rybakowski, The Morse index, repeller-attractor pairs and the connection index for semiflows on noncompact spaces, J. Differential Equations 47 (1983), 66-98. [ 195] T. Sauer, J.A. Yorke and M. Casdagli, Embedology, J. Statist. Phys. 65 (1991), 579-616. [196] G.R. Sell, Nonautonomous differential equations and topological dynamics. I." The basic theory, Trans. Amer. Math. Soc. 127 (1967), 241-262. [ 197] G.R. Sell, Lectures on Topological Dynamics and Differential Equations, Van-Nostrand-Reinhold, Princeton, NJ ( 1971). [198] G.R. Sell and Y. You, Dynamics of Evolutionary Equations (1999) (in preparation). [ 199] L. Simon, Asymptotics for a class of nonlinear evolution equations, with applications to geometric problems, Ann. of Math. 118 (1983), 525-571. [200] J. Smoller and A. Wasserman, Generic properties of steady state solutions, J. Differential Equation 52 (1984), 423-438. [201] A.M. Stuart and A.R. Humphries, Dynamical Systems and Numerical Analysis, Cambridge Monographs Appl. Comput. Math., Vol. 2, Cambridge Univ. Press, Cambridge (1996). [202] R. Temam, Infinite Dimensional Dynamical Systems in Mechanics and Physics, Springer, New York (1988), Second Edition (1997). [203] P. Thieullen, Entropy and the Hausdorff dimension for infinite-dimensional dynamical systems., J. Dynamics Differential Equations 4 (1992), 127-159. [204] M.I. Vishik, Asymptotic Behaviour of Solutions of Evolutionary. Equations, Lezioni Lincee, Cambridge Univ. Press, Cambridge (1992). [205] V. Volterra, Sur la th~orie math~matique des ph~nomknes h~r~ditaires, J. Math. Pures Appl. 7 (1928), 249-298. [206] V. Volterra, Lefons sur la th~orie math~matique de la lutte pour la vie, Gauthier-Villars, Paris (1931). [207] G.F. Webb, Compactness of bounded trajectories of dynamical systems in infinite dimensional spaces, Proc. Roy. Soc. Edinburgh 84 (1979), 19-34. [208] G.F. Webb, A bifurcation problem for a nonlinear hyperbolic partial differential equation, SIAM J. Math. Anal. 10 (1979), 922-932. [209] G.E Webb, Existence and asymptotic behavior for a strongly damped nonlinear wave equation, Canad. J. Math. 32 (1980), 631-643. [210] J.C. Wells, Invariant manifolds of nonlinear operators, Pacific J. Math. 62 (1976), 285-293. [211] I. Witt, Existence and continuity of the attractor for a singularly perturbed hyperbolic equation, J. Dynamics Differential Equations 7 (1995), 591-639. [212] M. Wolfrum, Geometry of heteroclinic cascades in scalar parabolic equations, Preprint of the Weiertral3Institut ftir Angewandte Analysis und Stochastik, Berlin (1998). [213] E. Zauderer, Partial Differential Equations of Applied Mathematics, New York, Wiley (1983). [214] T.J. Zelenyak, Stabilization of solutions of boundary value problems for a second order parabolic equation with one space variable, Differential Equations 4 (1968), 17-22. [215] M. Zl~imal, Sur l'Equation des T~l~graphistes avec un petit paramktre, Att. Accad. Naz. Lincei, Rend. C1. Sci. Fis. Mat. Nat. 27 (1959), 324-332.
982
G. Raugel
[216] M. Zl~imal, The mixed problem for hyperbolic equations with a small parameter, Czechosl. Math. J. 10 (1960), 83-122. [217] E. Zuazua, Exponential decay for the semilinear wave equation with locally distributed damping, Commun. Partial Differential Equations 15 (1990), 205-235.
CHAPTER
18
Stability of Travelling Waves Bj6rn Sandstede* Department of Mathematics, Ohio State Universi~, 231 West 18th Avenue, Columbus, OH 43210, USA E-mail: sandstede. 1 @osu.edu
Contents 1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
985
2. Set-up and examples
986
2.1. Set-up
..............................................
...................................................
2.2. Examples
986
.................................................
3. Spectral stability
988
................................................
990
3.1. Reformulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
991
3.2. Exponential dichotomies
991
.........................................
3.3. Spectrum and Fredholm properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4. Fronts, pulses and wave trains
......................................
3.5. Absolute and convective instability
...................................
4. The Evans function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1. Definition and properties
.......................
4.3. Extension across the essential spectrum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5. Spectral stability of multi-bump pulses
999 1005 1006
.........................................
4.2. The computation of the Evans function, and applications
996
....................................
1007 1008 1012 1017
5.1. Spatially-periodic wave trains with long wavelength . . . . . . . . . . . . . . . . . . . . . . . . . .
1021
5.2. Multi-bump pulses
1027
............................................
5.3. Weak interaction of pulses
........................................
6. Numerical computation of spectra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1033 1034
6.1. Continuation of travelling waves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1034
6.2. Computation of spectra of spatially-periodic wave trains . . . . . . . . . . . . . . . . . . . . . . . .
1035
6.3. Computation of spectra of pulses and fronts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7. Nonlinear stability
...............................................
8. Equations with additional structure
......................................
9. Modulated, rotating, and travelling waves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1036 1039 1042 1046
Acknowledgment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1048
References
1049
.....................................................
*This work was partially supported by the NSF under grant DMS-9971703. H A N D B O O K OF D Y N A M I C A L S Y S T E M S , VOL. 2 Edited by B. Fiedler 9 2002 Elsevier Science B.V. All rights reserved 983
984
B. Sandstede
Abstract
An overview of various aspects related to the spectral and nonlinear stability of travellingwave solutions to partial differential equations is given. The point and the essential spectrum of the linearization about a travelling wave are discussed as is the relation between these spectra, Fredholm properties, and the existence of exponential dichotomies (or Green's functions) for the linear operator. Among the other topics reviewed in this survey are the nonlinear stability of waves, the stability and interaction of well-separated multi-bump pulses, the numerical computation of spectra, and the Evans function, which is a tool to locate isolated eigenvalues in the point spectrum and near the essential spectrum. Furthermore, methods for the stability of waves in Hamiltonian and monotone equations as well as for singularly perturbed problems are mentioned. Modulated waves, rotating waves on the plane, and travelling waves on cylindrical domains are also discussed briefly.
Stability o f travelling waves
985
1. Introduction This survey is devoted to the stability of travelling waves. Travelling waves are solutions to partial differential equations that move with constant speed c while maintaining their shape. In other words, if the solution is written as U (x, t) where x and t denote the spatial and time variable, respectively, then we have U ( x , t) = Q ( x - c t ) for some appropriate function Q(~). Note that c = 0 describes standing waves that do not move at all. In homogeneous media, travelling waves arise as one-parameter families: any translate Q ( x + r - c t ) of the wave Q ( x - c t ) , with r E IR fixed, is also a travelling wave. We can distinguish between various different shapes of travelling waves (see Figure 1): Wave trains are spatially-periodic travelling waves so that Q(~ + L) = Q(~) for all for some L > 0. Homogeneous waves are steady states that do not depend on ~ so that Q(~) = Q0 for all ~. Fronts, backs and pulses are travelling waves that are asymptotically constant, i.e., that converge to homogeneous rest states: l i m ~ • Q(~) = Q+. For fronts and backs, we have Q+ =/= Q_, whereas pulses converge towards the same rest state as --+ 4-oo so that Q+ = Q_. Travelling waves arise in many applied problems. Such waves play an important role in mathematical biology (see, e.g., [121]) where they describe, for instance, the propagation of impulses in nerve fibers. Various different kinds of waves can often be observed in chemical reactions [99,182]; one example are flame fronts that arise in problems in combustion [182]. Another field where waves arise prominently is nonlinear optics (see, e.g., [1 ]): of interest there are models for the transmission and propagation of beams and pulses through optical fibers or waveguides. We refer to [38,43,89] for applications to water waves. Travelling waves also arise as viscous shock profiles in conservation laws that model, for instance, problems in fluid and gas dynamics or magneto-hydrodynamics [ 171 ]. Localized structures in solid mechanics can be modelled by standing waves (see [172174]). We refer to [59] for the existence and stability of patterns on bounded domains. In this article, we focus on the stability of a given travelling wave. That is, we are interested in the fate of solutions whose initial conditions are small perturbations of the travelling wave under consideration. If any such solution stays close to the set of all translates of the travelling wave Q(.) for all positive times, then we say that the travelling wave Q(.) is stable. If there are initial conditions arbitrarily close to the wave such that the associated solutions leave a small neighbourhood of the wave and its translates, then the wave is said to be unstable. In other words, we are interested in orbital stability of travelling waves. There exists an enormous number of different approaches to investigate the stability of waves: which of these is the most appropriate depends, for instance, on whether the
Fig. 1. Travelling waves with various different shapes are plotted: pulses in (a), spatially-periodic wave trains in (b), fronts in (c), and backs in (d). Note that the distinction between fronts and backs is, in general, rather artificial.
B. Sandstede
986
partial differential equation is dissipative or conservative, or whether one can exploit a special structure such as monotonicity or singular perturbations. Given this variety, writing a comprehensive survey is quite difficult: thus, the selection of topics appearing in this survey is a very personal one and, of course, by no means complete. We refer to the recent review [ 184] and to the monograph [ 182] for many other references related to the existence and stability of waves. A natural approach to the study of stability of a given travelling wave Q is to linearize the partial differential equation about the wave. The spectrum of the resulting linear operator s should then provide clues as to the stability of the wave with respect to the full nonlinear equation. As we shall see in Section 3, the spectrum of s is the union of the point spectrum, defined as the set of isolated eigenvalues with finite multiplicity, and its complement, the essential spectrum. Point and essential spectra are also related to Fredholm properties of the operator s - ),. Most of the results presented here are formulated using the first-order operator T()~) that is obtained by casting the eigenvalue operator 13 - )~ as a first-order differential operator. In Section 4, we review the definition and properties of the Evans function, which is a tool to locate and track the point spectrum of s In Section 7, we discuss under what conditions spectral stability of the linearization/2 implies nonlinear stability, i.e., stability of the wave with respect to the full partial differential equation. The stability analysis of a given wave is often facilitated by exploiting the structure of the underlying equation. In Section 8, we provide some pointers to the literature for Hamiltonian and monotone equations as well as for singularly perturbed problems. In many applications, it appears to be difficult to analyze the stability of travelling waves analytically. For this reason, we comment in Section 6 on the numerical computation of the spectra of linearizations about travelling waves. An interesting problem that is relevant for a number of applications is the stability of multi-bump pulses that accompany primary pulses. Recent results in this direction are reviewed in Section 5. Most of the results presented in this survey are also applicable to other waves, for instance, rotating waves such as spiral waves in two space dimensions, modulated waves (waves that are time-periodic in an appropriate moving frame), and travelling waves on cylindrical domains. Some of these extensions are discussed in Section 9.
2. Set-up and examples 2.1. Set-up We consider partial differential equations (PDEs) of the form ut = A ( O x ) u + A ; ( U ) ,
x ~ R, u ~ x .
(2.1)
Here, A(z) is a vector-valued polynomial in z, and 2, is an appropriate Banach space consisting of functions U(x) with x 6 R, so that A(Ox) :,9( __+ ,9( is a closed, densely defined operator. Lastly, A/": 2, --+ 2' denotes a nonlinearity, perhaps not defined on the entire space X, that is defined via pointwise evaluation of U and, possibly, derivatives of U. We refer to [85,133] for more background.
Stability o f travelling w a v e s
987
Travelling waves are solutions to (2.1) of the form U (x, t) = Q ( x - c t ) . Introducing the coordinate ~ - - x - c t , we seek functions U ( ~ , t) - - U ( x - c t , t) that satisfy (2.1). In the (~, t)-coordinates, the PDE (2.1) reads
u, = A(o~)u + cO~U + A;(U),
~ ~ R, U ~ X,
(2.2)
and the travelling wave is then a stationary solution Q (~) that satisfies
o = A(0~)u + cO~ u + A/(u).
(2.3)
The linearization of (2.2) about the steady state Q(~) is given by
u, = A(o~ ) u + cO~ u + OuA;(Q)U.
(2.4)
The right-hand side defines the linear operator s .= A ( ~ ) + cO~ + OuA;(Q). Spectral stability of the wave Q is determined by the spectrum of the operator/2, i.e., by the eigenvalue problem
z u = A(o~)u + cO~U + ~uA;(Q)U = s
(2.5)
that determines whether (2.4) supports solutions of the form U(~, t) = e zt U(r Note that the steady-state equation (2.3) and the eigenvalue problem (2.5) are both ordinary differential equations (ODEs). As such, they can be cast as first-order systems. The steady-state equation, for instance, can be written as !
u =f(u,c),
uE~",
d '------. d~
(2.6)
The travelling wave Q (r corresponds to a bounded solution q (~) of (2.6). The PDE eigenvalue problem (2.5) becomes u'--(O,,f(q(~),c)+~,B)u,
(2.7)
where B is an appropriate n x n matrix that encodes the PDE structure (see Section 2.2 below for examples). An important relation is given by (2.8) which follows from inspecting (2.5). In this survey, we focus on the ODE formulation (2.6) and (2.7). In particular, travelling waves can be sought as bounded solutions of (2.6), and we refer to the textbooks [33,80, 107] for a dynamical-systems approach to constructing such solutions.
988
B. Sandstede
2.2. Examples We give a few examples that fit into the framework outlined above. EXAMPLE 1 (Reaction-diffusion systems). Let D be a diagonal N x N matrix with positive entries and F : 1RN --+ IRN be a smooth function. Consider the reaction-diffusion equation Ut = DUxx + F(U),
(2.9)
x E ]~, U E ]1~N ,
posed on the space A" = C uon i f ( ~ , ~ N ) of bounded, uniformly continuous functions. In the moving frame ~ -- x - ct, the system (2.9) is given by Ut = D U ~ + cU~ + F ( U ) ,
(2.10)
~ E ]~, U E ]t~N.
Suppose that U(~, t) = Q(~) is a stationary solution of (2.10) such that DQ~(~)+cQ~(~)+F(Q(~))=O,
(2.11)
~ ER.
The eigenvalue problem associated with the linearization of (2.10) about Q(~) is given by (2.12)
~U = D U ~ + cU~ + Ou F ( Q ) U =:/2U.
This eigenvalue problem can be cast as
V~
=
D -1 ()~U - Ou F ( Q ( ~ ) ) U - c V )
_(
0
id
D -l()~- OuF(O(~)))
- c O -1
)(U)
which we write as u~ = A(~; )~)u = (,4(~) + )~B)u,
u E R n = ~2N,
with u = (U, V) and
_
A(~) -
(
0
_ D _ l Og F ( Q ( ~ ) )
id)
- c D -1
'
B=
(2.13)
(o 0) 1 0
"
Bounded solutions to (2.12), namely (/2 - )0U = 0, and (2.13) are then in one-to-one correspondence. In particular, if Q (.) is not a constant function, then )~ = 0 is an eigenvalue of 12 with eigenfunction Q~ (~). This can be seen by taking the derivative of (2.11) with respect to which gives D(Q~)~ +c(Q~)~ + OuF(Q)Q~ =0
Stability of travelling waves
989
so that s = 0 . Hence, u(~) = (Q~ (~), Q ~ (~)) satisfies (2.13) for x = 0 . One important example is the FitzHugh-Nagumo equation (FHN) ut = uxx + f (u) - w, Wt = ~21/3xx + 8(U -- }/tO),
for instance with f (u) = u(1 - u)(u - a). It admits various travelling waves such as pulses, fronts and backs (see, e.g., [91,105,176] for references). The stability of pulses has been studied in [90,185]. Stability results for spatially-periodic wave trains can be found in [53, 156], whereas the stability of concatenated fronts and backs has been studied in [124,147] and [125,154]. Many other results on the stability of waves to reaction-diffusion equations can be found in the literature (see, e.g., [47,60]). One class of such equations that has been studied extensively are monotone systems (see [37,141,182] and Section 8). We also refer to [85, Section 5.4] for instructive examples. EXAMPLE 2 (Phase-sensitive amplification). The dissipative fourth-order equation Ut + (0~ + 2U 2 - ( 2 x - r/2)) (0~ + 2U 2 - ~2)U +4a(3U(O~U) 2 + U20~U) -0
(2.14)
models the transmission of pulses in optical storage loops under phase-sensitive amplification (see [ 106]). This equation with a = 0 admits the explicit solution Q(~) = r/sech(~) for every tc ~> 0. Its stability has been investigated in [6,106]. For a > 0, (2.14) has multibump pulses whose existence and stability has been analyzed in [ 150]. EXAMPLE 3 (Korteweg-de Vries equation). The generalized Korteweg-de Vries equation (KdV) is given by Ut + U~.,-x + U p U,- = 0,
x 6 IR,
where p is a positive parameter. Formulated in the moving frame ~ = x - ct, the generalized Korteweg-de Vries equation reads u, + u~ ~~ - c U~ + u ~'u~ = o,
~ ~ R,
where c denotes the wave speed. This equation admits a family of pulses given by Q ( ~ ) _ [c( p + 1)(p + 2) ] l/p 2
]
sech2J';
2
B. Sandstede
990
for any positive values of c and p. The stability of these solitons was investigated in [ 10], whereas asymptotic stability has been studied in [134,135]. The KdV equation is Hamiltonian for all p > 0 and known to be completely integrable for p = 1, 2. EXAMPLE 4 (Nonlinear Schriidinger equation). The nonlinear Schr6dinger equation (NLS) reads iqot at- qo~ at- 414512~ - 0,
~ ~ IR,
with 4~ 6 C. If we seek solutions of the form qs(~, t) = eic~ equation
iUt -q- U~ - coU -+-4IUI2U : 0,
t), then we obtain the
~ E R,
(2.15)
where U 6 C and co > 0. It is known [ 183] to support stable pulses given by Q(~)- V~ sech(,f~). The NLS equation is Hamiltonian and, in fact, completely integrable. Of interest is the persistence and stability of these waves upon adding perturbations that model various physical imperfections. An important example is the perturbation to the dissipative complex cubicquintic Ginzburg-Landau equation (CGL) iUt + U~ - c o U + 4lUl2U q- 3otlUl4U
= ie(dl U~ + d2U + d3IUI2U + d4lgl4g)
(2.16)
for small ot 6 1R and e > 0. We refer to [ 177,97,98,1] for various stability and instability results for solitary waves to this equation. Mathematically, the transition from (2.15) to (2.16) is interesting since the perturbation destroys the Hamiltonian nature of (2.15). We refer to [99,121,171,176,182] for problems where reaction-diffusion equations arise naturally. Formal derivations of the KdV, NLS and CGL equation can be found in [ 1] and [38,89] for problems in nonlinear optics and for water waves, respectively.
3. Spectral stability In this section, we review results on the structure of the spectrum of the linearization of a nonlinear PDE about a travelling wave.
Notation. Throughout this survey, we denote the range and the null space of an operator Z; by R(Z;) and N(Z;), respectively. Eigenvalues of operators and matrices are always counted with algebraic multiplicity.
991
Stability of travelling waves
Consider a matrix A ~ C" • We often refer to the eigenvalues of the matrix A as the spatial eigenvalues. We say that A is hyperbolic if all eigenvalues of A have nonzero real part, i.e., if spec(A) AiR = 0. We refer to eigenvalues of A with positive (negative) real part as unstable (stable) eigenvalues. Similarly, the generalized eigenspace of A associated with all eigenvalues with positive (negative) real part is called the unstable (stable) eigenspace of A. The 6-neighbourhood of an element or a subset z of a vector space is denoted by/d~ (z).
3.1. Reformulation As mentioned above, it is often advantageous to write the eigenvalue problem associated with the linearization as a first-order ODE. Therefore, we consider the family T of linear operators defined by 7-(X):7)
~H,
du > ---A(.;X)u,
u~
d~
for X E C. We take either
C '' )
I (R, C" ) , 7) = Cunif or
7 ) - H' (IR, C"),
7-[ = L2(R,
C").
(3.1)
Throughout this survey, we assume that the following hypothesis is met. HYPOTHESIS 3.1. The matrix-valued function A (~; X) ~ C" •
is of the form
A(~'X)--A(~)+XB(~), where A(.) and B(.) are in C~
R'z•
The operators 7-(X) are closed, densely defined operators in 7-/with domain 7). We are interested in the set of X for which TOO is not invertible.
3.2. Exponential dichotomies Spectral properties of T can be classified by using properties of the associated ODE d
---u=A(~;X)u
d~
(3.2)
992
B. Sandstede
with u ~ C n . We denote by 4, (~, () the evolution operator ~ associated with (3.2). Note that q:, (~, () = 4~ (~, (; )~) depends on )~, but we often suppress this dependence in our notation. A particularly useful notion associated with linear ODEs such as (3.2) is exponential dichotomies. Suppose that we consider a linear constant-coefficient equation d
--u
d~
(3.3)
= A ()Ou,
so that A (,k) does not depend on ~. We want to classify solutions to (3.3) according to their asymptotic behaviour as I~l --+ ec. Suppose that the matrix A ()~) is hyperbolic so that the spatial spectrum spec(A (,k)) has no points on the imaginary axis. Consequently, c" -
Eo(2.) G E800 ~
(3.4)
where the two spaces on the right-hand side are the generalized stable and unstable eigenspaces of the matrix A(,k). We denote by P(~(~) the spectral projection of A()0, so that R ( P ~ ( ~ ) ) - E~(~),
N(P~ ( X ) ) - E~(~).
(3.5)
These subspaces are invariant under the evolution 4~(~, () = e A('~)(~-~') of (3.3). Furthermore, solutions u(~) with initial conditions u ( ( ) in E6(~.) decay exponentially for ~ > (, while solutions with initial conditions u ( ( ) in E~)(~.) decay exponentially for ~ < (. We are interested in a similar characterization of solutions to the more general Equation (3.2): DEFINITION 3.1 ( E x p o n e n t i a l d i c h o t o m i e s ) . Let I = N +, IR- or 1R, and fix )~. E C. We say that (3.2), with ~ = ~.. fixed, has an exponential dichotomy on I if constants K > 0 and x s < 0 < Ku exist as well as a family of projections P (~), defined and continuous for E I, such that the following is true for ~, ( E I. 9 With 45s (~, () := 45 (~, () P ((), we have Iqss(~,()]~(,
9 Define qsu(~, () := 45(~, ( ) ( i d - P ( ( ) ) , [ ~ u ( s e , ( ) [ ~ < K e Ku(~-~),
~,(EI. then
se ~ < ( , se , ( E I .
9 The projections commute with the evolution, 45(~, ( ) P ( ( ) = P(~)45(~, (), so that 45s(~, ()uo r R ( P ( ~ ) ) ,
~ ~> ~, s~, ~- E /
qsu(~, ()uo E N ( P ( ~ ) ) ,
~ ~< ~', ~,~" e / .
I I.e., qs(~, ~) = id, 05(~, r)qS(r, () = 45(~, () for all ~, r, ( E IR and u(~) = 45(~, ()u0 satisfies (3.2) for every u0 E Cn .
993
Stability of travelling waves
R(P(~))
N(p(r /
~u(r
r
Fig. 2. A plot of the stable and unstable spaces associated with an exponential dichotomy. Vectors in the stable space R(P(r are contracted exponentially under the linear evolution 4~s(~, ~') for ~ > ~'. Similarly, vectors in the unstable space N(P (~)) are contracted under the linear evolution 45u(~", ~) for ~ > ~'.
The ~-independent dimension of N ( P ( ~ ) ) is referred to as the Morse index of the exponential dichotomy on I. If (3.2) has exponential dichotomies on R + and on R - , the associated Morse indices are denoted by i+0~,) and i_ (~.,), respectively. Roughly speaking, (3.2) has an exponential dichotomy on an unbounded interval I if each solution to (3.2) on I decays exponentially either in forward time or else in backward time. The set of initial conditions u(~') leading to solutions u(~) that decay for ~ > r with ~, ~" E I, is given by the range R ( P ( r of the projection P(r Similarly, the set of initial conditions u(~') leading to solutions u(~) that decay for ~ < ~', with ~, ~" 6 I, is given by the null space N(P(~')). The spaces R(P(~)) are mapped into each other by the evolution associated with (3.2); this is also true for the spaces N ( P ( ~ ) ) ; see Figure 2 for an illustration. For the constant-coefficient equation (3.3), we have P(~) = P~(~.) due to (3.5). Note that, for constant-coefficient equations, the Morse index of the exponential dichotomy is simply the dimension of the generalized unstable eigenspace. Exponential dichotomies persist under small perturbations of the equation. This result is often referred to as the roughness theorem for exponential dichotomies. If we, for instance, perturb the coefficient matrix A (i.) of the constant-coefficient equation (3.3) by adding a small ~-dependent matrix, we expect that the two subspaces E~(I.) and E~(~.) that appear in (3.4) perturb slightly to two new ~-dependent subspaces that contain all initial conditions that lead to exponentially decaying solutions for forward or backward times. THEOREM 3.1 [36, Chapter 4]. Firstly, let I be R + or R - . C~ C "x") and that the equation d --u=A(~)u d~
Suppose that A(.)
(3.6)
has an exponential dichotomy on I with constants K, K s and x u as in Definition 3.1. There are then positive constants 6, and C such that the following is true. If B(.) ~ C~ C ''•
994
B. Sandstede
such that sup~i,l~l~t IB(@)I < ~ / C f o r some 6 < 6, and some L >~ O, then a constant K > 0 exists such that the equation d d U -- (A(~) + B ( ~ ) ) u
(3.7)
has an exponential dichotomy on I with constants K, x s + 6 a n d x u - 8. Moreover, the projections P ( ~ ) and evolutions 45s(~, ~') a n d q~u(~, ~.) associated with (3.7) are 6-close to those a s s o c i a t e d w i t h ( 3 . 6 ) f o r a l l ~, ~ ~ I with I~l, I~l ~ L. Secondly, if l = JR, then the above statement is true with L -- O.
Thus, to get persistence of exponential dichotomies on R + or R - , the coefficient matrices of the perturbed equation need to be close to those of the unperturbed equation only for all sufficiently large values of I~ I. For I = R, the coefficient matrices need to be close for all ~ 6 R to get persistence. Theorem 3.1 can be proved by applying Banach's fixed-point theorem to an appropriate integral equation whose solutions are precisely the evolution operators that appear in Definition 3.1 (see [143,137]). Indeed, suppose that 4~s(~, ~') and 4~u(~, ~') denote exponential dichotomies of (3.6) on I - R +, say. If sup~> 0 IB(~)I is sufficiently small, then the dichotomies q~s(~, ~-) and 4~u(~, ~') associated with (3.7) can be found as the unique solution of the integral equation 0 -- q~s(~, ~) _ 4~s(~, ~) + _ +
f' f0
q:,s(~,r)B(r)q~S(r, ~')dr qss(~, r)B(r)q~U(r, ~')dr,
_
f0'
0 ~< ~" ~< (3.8)
0 -- 4~u(~, ~') - q~u(~, ~.) _
-
qbu(~, r ) B ( r ) ~ s ( r , ~ ) d r
f'
4~u(~,r ) B ( r ) ~ u ( r , ~')dr
4~s(~,r)B(r)q~U(r, ~') dr q~u(~, r)B(r)q~S(r, ~')dr,
0 ~< ~ ~< ~"
(see [ 143,137] for details). We emphasize that exponential dichotomies are not unique: on R +, for instance, the range of P (~) is uniquely determined, whereas the null space of P (0) can be chosen to be any complement of R(P(0)); any such choice then determines the null space of P (~) for every ~ > 0 by the requirement that the projections and the evolution operators commute. The above integral equation fixes such a complement. REMARK 3.1. If the perturbation B(~) in (3.7)converges to zero as I~l ~ ~ with ~ 6 I, then the projections and evolutions of (3.7) converge to those of (3.6) (see, e.g., [ 143,137]).
Stability of travelling waves
995
It is also true that, if (3.2) has an exponential dichotomy for ~. -- ~.,, then the evolutions and projections that appear in Definition 3.1 can be chosen to depend analytically on ~. for ;v close to ~., (see again [143,137]). It is often of interest to distinguish solutions according to the strength of the decay or growth. For instance, for the constant-coefficient system (3.3), we might be interested in distinguishing solutions u l($) that satisfy
[Ul(~) I ~ from solutions
e+lu,(o)l,
U2($) that
> 0
satisfy
lu2(+)l ~ e ~}, exploiting a spectral gap.
996
B. Sandstede
3.3. S p e c t r u m a n d Fredholm properties We consider the family of operators 7-0~)'79
> 7-[,
u l
>
du
d~
A (. ; ~.) u,
with parameter )~. We are interested in characterizing those )~ for which the operator 7 - O ~ ) ' D --+ 7-[ is not invertible. The set of all such ~, is the spectrum of the linearization s about the travelling wave. We emphasize that the spectrum of the individual operators TOO "79 --+ 7-/, for fixed )~, is of no interest to us. DEFINITION 3.2 (Spectrum). We say that )~ is in the spectrum s of 7- if 7-(X) is not invertible, i.e., if the inverse operator does not exist or is not bounded. We say that ~. 6 s is in the point spectrum s of 7" or, alternatively, that )~ 6 s is an eigenvalue of 7" if 7-(X) is a Fredholm operator with index zero. The complement E \ ~V'pt =" s is called the essential spectrum. The complement of s in C is the resolvent set of 7-. Recall that an operator 12:2' ~ y is said to be a Fredholm operator if R(E) is closed in y , and the dimension of N ( s and the codimension of R(s are both finite. The difference d i m N ( s - codimR(E) is called the Fredholm index of s It is a measure for the solvability of s = y for a given y E Y. Fredholm operators are amenable to a standard perturbation theory using Liapunov-Schmidt reduction. If/2e : 2" --+ y denotes a Fredholm operator that depends continuously on e E R in the operator norm, then Liapunov-Schmidt reduction replaces the equation ~_.e u m 0
by a reduced equation of the form Z2~u -- O,
E"~ "N(s
> RU2o) -J-,
that is valid for e close to zero, where R(s • is a complement of R(s Note that both spaces appearing in the above equation are finite-dimensional. We refer to [ 180, Chapter 3] and [75, Chapters 1.3 and VII] for introductions to Liapunov-Schmidt reduction. For any )~ in the point spectrum of T , we define the multiplicity of )~ as follows. Recall that A(~; )~) is of the form A(~" )~) - A(~) +)~B(~). Suppose that )~ is in the point spectrum of 7-, with 7-(~) -- d d~
,4(~) - )~B(~),
such that N ( T 0 0 ) = span{ul (.)}. We say that )~ has multiplicity g if functions uj be found for j - 2 . . . . . g such that d d~
~
'
'
E
79 can
997
Stability of travelling waves
for j - 2 . . . . . g, but so that there is no solution u 6 D to d d~
u = (X(~) + ~B(~))u + B(~)u~(~),
~ ~ R.
Lastly, we say that an arbitrary eigenvalue )~ of 7- has multiplicity g if the sum of the multiplicities of a maximal set of linearly independent elements in N(7-0~)) is equal to g. EXAMPLE 1 (continued). Recall the operator s -- DO~ + cO~ + Ou F ( Q ) and the associated family 7 - 0 0 7-(~) _
d d~
_
(
A(~) - )~B
with
a(~)
--
0 _D_
I OU F ( Q ( ~ ) )
,d) -cD
-1
. (o 0) 0
'
Suppose that )~ is in the spectrum of/2 and 7-. The Jordan-block structures of the operators / 2 - )~ and 7-0~) are then the same, i.e., geometric and algebraic multiplicities and the length of each maximal Jordan chain are the same whether computed for Z2 - )~ or for 7-0~). This justifies our definition of multiplicity for eigenvalues of 7-. It is also true that the Fredholm properties, and the Fredholm indices, of s - )~ and 7 - 0 0 are the same (see, e.g., [153,157]). REMARK 3.2. The point spectrum is often defined as the set of all isolated eigenvalues with finite multiplicity, i.e., as the set rpt of those )~ for which 7-(~.) is Fredholm with index zero, the null space of 7-0~) is nontrivial, and 7-(~.) is invertible for all 2 in a small neighbourhood of ~. (except, of course, for 2 -- )~). The sets rpt and rpt differ in the following way. The set of )~ for which 7 - 0 0 is Fredholm with index zero is open. Take a connected component C of this set, then the following alternative holds. Either 7 - 0 0 is invertible for all but a discrete set of elements in C, or else 7-0~) has a nontrivial null space for all )~ E C. This follows, for instance, from using the Evans function (see Section 4.1). The following theorem proved by Palmer relates Fredholm properties of the operator TOO to properties pertaining to the existence of dichotomies of (3.2) d - - u -- A(~" )~)u. d~
THEOREM 3.2 [131,132]. Fix )~ ~ C. The following statements are true. 9 k is in the resolvent set o f 7- if and only if (3.2) has an exponential dichotomy on IR.
998
B. Sandstede
9 x is in the point spectrum ~V'pt of'-Jl- if and only if (3.2) has exponential dichotomies on R + and on ]K- with the same Morse index, i+O0 = i - O 0 , and d i m N ( T 0 0 ) > 0. In this case, denote by 1~ (~;)~) the projections o f the exponential dichotomies of(3.2) on R +, then the spaces N(P_(0; X)) f-] R(P+(0; X)) and N(T(X)) are isomorphic via u(O) ~ u(.). 9 )~ is in the essential spectrum 2Tess if (3.2) either does not have exponential dichotomies on R + or on R - , or else if it does, but the Morse indices on R + and on R - differ
As a consequence, eigenfunctions associated with elements in the point spectrum of T decay necessarily exponentially as I~1--> ~ . REMARK 3.3. To summarize the relation between Fredholm properties of T and exponential dichotomies of (3.2), we remark that T is Fredholm if, and only if, (3.2) has exponential dichotomies on R + and on ]K-. The Fredholm index of T is then equal to the difference i - 0 0 - i + 0 0 of the Morse indices of the dichotomies on ]K- and ]K+ (see [131,132]). If TOO is not Fredholm, then typically the range R(T(~)) of T0~) is not closed in 7-/. Suppose that TOO is invertible, and denote by r (~, ~.; )~) and r tial dichotomy of (3.2) on R. The inverse of TOO is then given by u(,~) -- [7()O-lh](~) --
F
qbs(,~, ~'" ,k)h(~') d~" +
~.; ,k) the exponen-
~u(~., ~.. ,k)h(~') d~'.
oo
If T 0 0 is Fredholm with index i, then its range is given as follows. Consider the adjoint equation d d~
(3.10)
~v=-A(~;)~)*v
and the associated adjoint operator T(X)*:D
> ~,
vl
>
dl)
d~
A(.;X)*v
(3.11)
(note that TOO* is the genuine Hilbert-space adjoint of TOO only when posed on the spaces (3.1)). The adjoint operator TOO* is Fredholm with index - i . We have that h E R ( T 0 0 ) if, and only if,
f_~ (7,(se), h (se))dse --0 (3O
(3.12)
for each 7t E N ( T 0 0 * ) , i.e., for each bounded solution ~p(~) of (3.10). In fact, the following remark is true.
Stability of travelling waves
999
REMARK 3.4. Suppose that the equation d --u=A(~;X)u d~
(3.13)
has an exponential dichotomy on I with projections P(~; X) and evolutions q~s(~, ~';X) and q~u(~, ~-; X), then the equation d --v=-A(~;X)*v d~
(3.14)
also has an exponential dichotomy on I with projections P(~" X) and evolutions q~s(~, ~'" i.) and q~u(~, ~.; i.). The projections and evolutions of (3.13) and (3.14) are related via P(~; X) -- i d - P ( ~ " X)*,
q~(~, ~. z) - ~u(~, ~; ~),,
q,u(~, ~. z) - q~(~, ~. z)*. This is a consequence of Definition 3.1 together with the following observation (see also [157, Lemma 5.1]): if q~(~, ~') denotes the evolution of (3.13), then, upon differentiating the identity q~(~, ~')q~(~', ~) = id with respect to ~, we see that q~(~, ~') -- q~(~', ~)* is the evolution of (3.14). In particular, 7t 6 N(T(X)*) if, and only if, ~(0) e N(P_ (0; X)) A R(P+(0; X)) -- (N(P_ (0; X)) + R(P+(0; X))) -k, where P+(~; X) and P+(~" X) are the projections for (3.13) and (3.14), respectively, on I = R ~. REMARK 3.5. Note that d
for any two solutions u(~) and v(~) of (3.13) and (3.14), respectively. In particular, if u(~) and v(~) are both bounded, and one of them converges to zero as ~ --+ oc or ~ --> - o c , then (u(~), v(~)) = 0 for all ~.
3.4. Fronts, pulses and wave trains In this section, we discuss the consequences of the above results for fronts, pulses and wave trains.
1000
B. Sandstede
3.4.1. H o m o g e n e o u s rest states. Suppose that the travelling wave Q(~) is a homogeneous stationary solution, so that Q(~:) - Q0 E ]1~n does not depend on ~. The coefficients of the PDE linearization about Q0 are constant and do not depend on ~. Thus, assume that A (~" ~) -- Ao(~) -- Ao 4- ~Bo does not depend on r and consider (3.2), now given by d
--u
dr
-- Ao(X)u.
This equation has an exponential dichotomy on II~ if, and only if, A0()0 is hyperbolic. In fact, if A000 is hyperbolic, then ~ s ( ~ , (; X) _ eA0(,~)(r162
~ u ( ~ , ( . X) _ eA00~)(r
where P~(,k) and P~(,k) are the spectral projections of A0(~.) associated with the stable and unstable spectral sets, respectively. We have the following alternative: 9 )~ is in the resolvent set of 7- if, and only if, A0(~) is hyperbolic. 9 ~. is in the essential spectrum Z'ess if, and only if, A0(~.) has at least one purely imaginary eigenvalue, i.e., t e s s = {~. E C; spec(A000) A ill~ --/: 0}. In particular, the point spectrum is empty. EXAMPLE 1 (continued). Suppose that Q0 is a homogeneous rest state. Hence,
Ao(X)--
0
D -I(X-0UF(Q0))
id )
-cO -I
'
and X is in the essential spectrum of 7- if, and only if, d0(,~, k) - det[A00~) - ik] -- 0 has a solution k E R. The function d0(X, k) is often referred to as the (linear) dispersion relation. Typically, the essential spectrum consists of the union of curves )~, (k) in the complex plane, where ~., (k) is such that doO~,(k), k) = 0 for k 6 I~. Alternatively, the essential spectrum can be calculated by substituting U(r t) -e'~t+ik~Uo into the linear equation Ut = s An interesting quantity is the group velocity Cgroup = -- d--kImX, (k)
which is the velocity with which wave packets with Fourier spectrum centered near the frequency k evolve with respect to the equation Ut - s We refer to [24, Section 2] for more details regarding the physical interpretation of the group velocity.
Stability of travelling waves
1O01
3.4.2. Periodic wave trains. If we consider the linearization about a spatially-periodic travelling wave Q(~) with spatial period L, i.e., about a wave train Q(~) with Q(~ + L) = Q(~) for all ~, then the coefficients of the PDE linearization have period L in ~. Thus, we assume that the matrix A (~;)~) is periodic in ~ with period L > 0, A(~ + L; )~) = A(~; k),
~ ~ IR,
so that d - - u -- A(~" 1.)u -- (,4(~) + k B ( ~ ) ) u d~
(3.15)
has periodic coefficients. By Floquet theory (see, e.g., [83, Chapter IV.6]), the evolution 4~(~, ~'; k) of (3.15) is of the form 9 (se, O; ~.) -- ~per(se" )v)eR()v)~, where R 0 0 E C ''• and qOper( ~ + L; k) = qbper(~; )~) for all ~ 6 IR with ~per(0; )~) = id. Note that it is not clear whether we can choose R(,k) to be analytic in k (though this is always possible locally in k). We have the following alternatives: The point spectrum r p t is empty, and 9 k is in the resolvent set of 7- if, and only if, spec(R00) AiR = 0, i.e.,if q~(L, 0; )0 has no purely imaginary Floquet exponent (or, equivalently, if q~(L, 0; )~) has no spectrum on the unit circle). 9 ~V'ess = {)~ E C; spec(R(k)) n iR 7~ 0} = {)~ 6 C; spec(q~(L, 0; k)) n S 1 r 0}. Consequently, k is in the essential spectrum if, and only if, the boundary-value problem d - - u = A(~; k)u, d$
0 < ~ < L,
(3.16)
u(L) = eiyu(0)
has a solution u(~) for some g c R. This is the case precisely if iv is a purely imaginary Floquet exponent of 45 (L, 0; k). The approach via Floquet theory is also applicable in higher space dimensions [163, 164], then often referred to as decomposition into Bloch waves, and we refer to [23,118, 119] for generalizations and applications to Turing patterns. Suppose that the wave train is found as a periodic solution q (~) to d - - u = f (u, c) d~ and that (3.15) is given by d --u --(0. f(q(~), c)+ kB)u
dse
B. Sandstede
1002 with -
As a consequence, A = 0 is contained in the essential spectrum, since q' (~) satisfies (3.16) for g = 0. Furthermore, spatially-periodic wave trains with period L typically exist for any period L, in a certain range, for a wave speed c(L) that depends on L (see, e.g., [33,80, 107]). It is not hard to verify, using the equations above, that
__dc(L) = -Cgroup---- - d - Imk(g) dL
dg
I•
,
where A(F) denotes the solution to (3.16) that satisfies A(0) -- 0. The group velocity at A = 0 is therefore related to the nonlinear dispersion relation c -- c(L) that relates wave speed and wavelength of the wave trains. We refer to [24,117] for the physical interpretation of the group velocity. We remark that, for each fixed F ~ R, the multiplicity of an eigenvalue A to (3.16) can again be defined as in Section 3.3 by using Jordan chains
d
d~
u = A(~" A)uj + B(~)uj_j j
'
uj(L) --e'•
(see [68]). These eigenvalues, counted with their multiplicity, can be sought as zeros of the Evans function
Oper(Y,A) ~-det[ei•
- ~ ( L , O; X)].
(3.17)
It has been proved in [68] that, for fixed g 6 R, A, is a solution to (3.16) with multiplicity if, and only if, A, is a zero of Dper(Y,A) of order e. 3.4.3. Fronts. Suppose that the travelling wave Q(~) is a front, so that the limits lim
Q(~) -
Q + 6 ]t~ N
exist. The vectors Q+ are homogeneous stationary solutions to the underlying PDE, and we refer to Q+ as the asymptotic rest states. Thus, the coefficients of the underlying PDE linearization have limits as ~ --4 4-oo. We assume that there are n x n matrices A+ and B• such that lim ~-+•
A(~) -- A+,
and define A+(X) -- A-E + XB+.
lim B(~) -- B+ ~+c~
Stability of travelling waves
1003
The existence of exponential dichotomies for the equation d (.4(~) § XB(~))u --u--A(~'k)u-d~
(3.18)
on IR+ is related to the hyperbolicity of the asymptotic matrices A+(A). The next theorem rephrases the statement of Theorem 3.1. THEOREM 3.3 [36, Chapter 6]. Fix X E C. Equation (3.18) has an exponential dichotomy on IR+ if and only if the matrix A+ (k) is hyperbolic. In this case, the Morse index i+ (X) is equal to the dimension dim E~_(X) of the generalized unstable eigenspace E~_ (k) of A+ (k). This statement is also true on 1R- with A+ (X) replaced by A_ (k). Lastly, (3.18) has an exponential dichotomy on IR if and only if it has exponential dichotomies on IR+ and on IR- with projections P+(~; X) such that N(P_(0; X)) G R(P+(0; k)) = C"; this requires in particular that the Morse indices i+(X) and i_(X) are equal. With a slight abuse of notation, we will refer to the number of unstable eigenvalues of a hyperbolic n • n matrix A, counted with multiplicity, as its Morse index. We observe that, using this notation, the Morse indices of the asymptotic matrices A+(A) are equal to the Morse indices i+(A) of the exponential dichotomies on •+ by the above theorem. Note that 7-(A) is Fredholm with index zero if, and only if, the number of linearly independent solutions to (3.18) that decay as ~ ~ -cx~ and the number of solutions that decay as ~ --+ cx~ add up to the dimension n of C 'Z. As a consequence of Theorems 3.2 and 3.3, we have the following options: 9 s is in the resolvent set of 7- if, and only if, A+(A) are both hyperbolic with the same Morse index i+ (s = i_ (X) such that the projections P+ (~; A) of the exponential dichotomies of (3.18)on I = IR• satisfy N(P_ (0; s G R(P+ (0; k)) = C 'z. 9 X is in the point spectrum rpt if, and only if, the asymptotic matrices A• are both hyperbolic with identical Morse index i+(s = i_(A) such that the projections P+(~; A) of the exponential dichotomies of (3.18) on I = R + satisfy N(P_(0; s N R(P+(0; X)) # {0}. 9 X is in the essential spectrum tess if either at least one of the two asymptotic matrices A+(X) is not hyperbolic (so that X is in the essential spectrum of one or both rest states Q+) or else if A+(X) and A_(s are both hyperbolic but their Morse indices differ, so that i+(s ~- i_(X). The reason that the boundary of the essential spectrum depends only on the asymptotic rest states Q+ is related to the fact that the operators T(X) and T(A)-
d d~
AA( 9"A)
with AC~;Z)--
for~ < 0 , { A_CX) A+CX)
for~ >/0,
1004
B. Sandstede
differ only by a relatively compact operator (see [85, Appendix to Section 5: Theorem A.1 and Exercise 2]). Typically, the essential spectrum of fronts contains open sets in the complex plane, namely regions where 7-(A) is Fredholm with nonzero index i_(A) - i + ( A ) # 0. Note that A = 0 is always contained in the spectrum with eigenfunction Q' (~). EXAMPLE 1 ( c o n t i n u e d ) . Suppose that Q(~) is a front connecting the asymptotic rest states Q+, so that
A+(X)--
0
D_ I ( X _ O U F ( Q + ) )
id ) -cD
-I
"
Thus, A is in the essential spectrum of T if either A is in the essential spectrum of Q+ or Q_ (see Section 3.4.1) or else if the Morse indices i_(A) and i+(A), i.e., the number of unstable eigenvalues of A+(A), differ. 3.4.4. P u l s e s .
Suppose that the travelling wave Q (~) is a pulse such that
lim Q(~) = Q0 E ]1~N. In other words, a pulse is a front that connects to the same rest state Q0 as ~ -+ -4-oo. Thus, we assume that there are n • n matrices A0 and B0 such that lim A (~) = A0,
lim B(~) -- B0
and define Ao(X) = Ao + XBo. This is a special case of the situation for fronts considered above. The main difference is that the Morse indices at ~ = +cx~ and ~ = -cx~ are always the same. As a consequence, the operator 7-(X) is either not Fredholm or is Fredholm with index zero. We have the following statement. 9 A is in the resolvent set of 7- if, and only if, the asymptotic matrix A0(X) is hyperbolic, and the projections P• X) of the exponential dichotomies of (3.18) on R + satisfy N(P_ (0; A)) @ R(P+(0; A)) = C n. 9 A is in the point spectrum Z'pt if, and only if, A0(X) is hyperbolic, and the projections P+(~; X) of the exponential dichotomies of (3.18) on ~ + satisfy N(P_ (0; X)) fq R(P+(0; X)) :/: {0}. 9 X is in the essential spectrum tess if the asymptotic matrix Ao(X) is not hyperbolic, i.e., if X is in the essential spectrum of the asymptotic rest state Qo. Again, X = 0 is always contained in the spectrum with eigenfunction Q'(~) (see Example 1).
Stability of travelling waves
1005
3.4.5. Fronts connecting periodic waves. Similar results are true for fronts that connect spatially-periodic waves to each other or to h o m o g e n e o u s rest states. The essential spectrum of such fronts is determined by the essential spectra of the asymptotic wave trains or rest states and their Morse indices: The essential spectra of the asymptotic wave trains or rest states has been computed in Sections 3.4.2 and 3.4.1 above. Exponential dichotomies for the asymptotic linearizations generate exponential dichotomies for the linearization about the front, and vice versa, by T h e o r e m 3.1. We omit the details.
3.5. Absolute and convective instability In this section, we report on absolute and convective instabilities that are related to the essential spectrum of a travelling wave. We refer to [16,24,135,162,155] for further details and more background, and also to [ 140] for instructive examples. Related p h e n o m e n a for matrices (via discretizations of PDE operators) are reviewed in [175]. Suppose that we consider a travelling wave that has essential spectrum in the right halfplane, so that the wave is unstable. Such an instability can manifest itself in different ways. The physics literature distinguishes between two different kinds of instability, namely absolute and convective instabilities. An absolute instability occurs if perturbations grow in time at every fixed point in the domain (see Figure 4(a)). Convective instabilities are characterized by the fact that, even though the overall norm of the perturbation grows in time, perturbations decay locally at every fixed point in the u n b o u n d e d domain; in other words, the growing perturbation is transported, or convected, towards infinity (see Figure 4(b)). 2 We outline how absolute and convective instabilities can be captured mathematically on the u n b o u n d e d domain R. Suppose that the linearization of the PDE about a pulse, say, is given by the operator 12, acting on the space Lz(R) with n o r m ]]. ]]. To describe convective instabilities, it is convenient to introduce exponential weights [ 162]: for a given real number ~7, define the norm I[" 117 by
IIUII2,7 - f ~
le -~ e(~)l 2 d~,
(3.19)
OO
(~)
(b)
T" Fig. 4. The dotted waves are the initial data U0(~) to the linearized equation Ut =/2U, whereas the solid waves represent the solution U(~, t) at a fixed positive time t. In (a) an absolute instability is shown: the solution grows without bounds at each given point ~ in space as t -+ cx~.In (b) a convective instability is shown: the solution U(~, t) grows but also travels towards ~ = +oc; U(~, t) actually decays for each fixed value of ~ as t --~ oc. The operator/2 would then have stable spectrum in the norm II" 11~7for a certain 77> 0. 2 Note that the difference between absolute and convective instabilities depends crucially on the choice of the spatial coordinate system: changing to a moving frame can turn a convective instability into an absolute instability.
1006
B. Sandstede
and denote by L 217(~) ' equipped with the norm I1" I1~ the space of functions U(~) for which IIU I1~ < o~. Note that the norms I1" I1~ for different values of 0 are not equivalent to each other. We consider s as an operator on L~2 (•) and compute its spectrum using the new norm I1" I1~ for appropriate values of 0. The key is that, for 0 > 0, the norm I1" I1~ penalizes perturbations at - c ~ , while it tolerates perturbations (which may in fact grow exponentially with any rate less than r;) at +o 7-/,
ul
>
du
d~
A(.;A)u,
is replaced by the operator 7- ~(A)" 79
> 7-/,
u,
>
du
d~e
[A(." A) - r/]u,
upon using the transformation (3.9). In particular, the essential spectrum of the operator /2 in the weighted space can be computed by applying the theory outlined in the previous sections to the operator T o (A), rather than to the operator T(A). These arguments also apply to fronts instead of pulses: it is then, however, often necessary to consider different exponents for ~ < 0 and for ~ > 0 in the weight function to accommodate the different asymptotic matrices A+(A). We refer to [ 155] for more details and references.
4. The Evans function We have seen that the spectrum of T is the union of the essential spectrum tess and the point spectrum X'pt. For pulses and fronts, the essential spectrum can be calculated by solving the linear dispersion relation of the asymptotic rest states (see Section 3.4). In this section, we review the Evans function which provides a tool for locating the point spectrum [2,134]. The Evans function can also be used to locate the essential spectrum of wave trains [68] (see Section 3.4.2).
Stability of travelling waves
1007
4.1. Definition and properties Consider the eigenvalue problem d --u=A(~;X)u, d~
u 9
~ 9
(4.1)
Since we are interested in locating the point spectrum, we assume that X is not in the essential spectrum Eess of 7- (see, however, Section 4.3). Owing to Theorem 3.2, Equation (4.1) therefore has exponential dichotomies on R + and R - with projections P+(~; X) and P_(~; X), respectively, and the Morse indices dimN(P+ (0; X)) = d i m N ( P _ (0; X)) are the same. Recall from Definition 3.1 that R(P+ (0; X)) contains all initial conditions u(0) whose associated solutions u(~) of (4.1) decay exponentially as ~ --+ ec. Analogously, N(P_ (0; X)) consists of all initial conditions u (0) whose associated solutions u (~) decay exponentially as ~ --+ - e c . In particular, owing to Theorem 3.2, we have that X 9 ~r'pt if, and only if, N(7-(X)) -~ N(P_ (0; X)) N R(P+(0; X)) 7~ {0}. Any eigenfunction u (~) is a bounded solution to the eigenvalue problem (4.1): u (0) should therefore lie in R(P+(0; X)), so that u(~) is bounded for ~ > 0, and in N(P_(0; X)), so that u(~) is bounded for ~ < 0. The Evans function D(X) is designed to locate nontrivial intersections of R(P+(0; X)) and N(P_ (0; X)). Let s be a simply-connected subset of C \ Sess. Note that, in most applications, the essential spectrum Eess will be contained in the left half-plane" otherwise the wave is already unstable. The set s of interest is then the connected component I-2~c of C \ Sess that contains the right half-plane. The Morse index dimN(P_(0; X)) -- dimN(P+(0; X)) is constant for X E I2, see Remark 3.1, and we denote it by k. We choose ordered bases [Ul(X) . . . . . Uk(X)] and [Uk+l(X) . . . . . u,z (X)] of N(P_(0; X)) and R(P+(0" X)), respectively. On account of [100, Chapter II.4.2], we can choose these basis vectors in an analytic fashion, so that uj (X) depends analytically on X E S2 for j -- 1 . . . . . n. We can also choose these basis vectors to be real whenever X is real (recall that we assumed that the matrices A (~) and B(~) are real). DEFINITION 4.1 (The Evans function). The Evans function is defined by D(X) = det[ul (X) . . . . . u,, (X)]. An immediate consequence of this definition is that D(X) = 0 if, and only if, X is an eigenvalue of T. Note that the Evans function depends on the choice of the basis vectors u j (X). Any two Evans functions, however, differ only by a product with an analytic function that never vanishes; this factor is given by the determinants of the transformation matrices that describe the change of bases. Since this ambiguity in the construction is of no consequence, we sometimes use, with an abuse of notation, the shortcut D(X) -- N(P_ (0; X))/x R(P+(0; X))
1008
B. Sandstede
to denote the Evans function associated with the subspaces N(P_ (0;)0) and R(P+ (0; s even though the above construction is not unique. Note that we could make the Evans function unique by, for instance, fixing an orientation for both subspaces N(P_ (0; ,k)) and R (P+ (0;)~)) and by choosing oriented, orthonormal bases. THEOREM 4.1 [54,2,70,134]. The Evans function DO0 is analytic in )~ E I2 and has the following properties. 9 D O 0 E R whenever )~ E R f-) S-2. 9 D()O = 0 if and only if )~ is an eigenvalue o f T . 9 The order of)~, as a zero of the Evans function DOQ is equal to the algebraic multiplicity of )~, as an eigenvalue of 7- (see Section 3.3). Here, the order of )~. as a zero of D(~) is the unique integer m ~> 0 for which dj D dXJ (~'*) = 0
(for j -- 0 . . . . . m
m
1),
d mD
~d)d" (z,)
# 0.
The reason why the Evans function counts the algebraic multiplicity of eigenvalues is related to the fact that, if we denote by 9 (~, (;)~) the evolution of d
d~ then, for each u0 E C n, the derivative 0z,/~ (~, 0; )~)u0 is a particular solution to
--ud _ (A(~) + )~B(~))u + B(~)~(~, O; )Ouo d~
This equation is precisely the equation that determines the algebraic multiplicity of )~ (see Section 3.3). Thus, the Evans function locates eigenvalues of 7- with their algebraic multiplicity. As we have seen in Example 1 and in Section 3.4, the Evans function typically vanishes at 3, = 0, so that D(0) = 0: the derivative Q~(~) of the travelling wave Q(~) generates the eigenvalue )~ --0. Note that, because of analyticity, the Evans function D 0 0 either vanishes identically in I2 or else it has a discrete set of zeros with finite order corresponding to isolated eigenvalues of 7- with finite multiplicity. This proves the statement in Remark 3.2.
4.2. The computation of the Evans function, and applications In general, it is difficult to calculate the Evans function explicitly for a given PDE. One class of PDEs for which the Evans function can often be computed is integrable PDEs for which Inverse Scattering Theory is available. Examples for which Evans functions have been calculated include the Korteweg-de Vries and the modified Korteweg-de
Stability of travelling waves
1009
Vries equation [ 135], Boussinesq-type equations [5,136], the nonlinear Schr6dinger equation [97], and the fourth-order PDE [6] from Example 2. In singularly perturbed reaction-diffusion equations, E'gUt = S2Uxx -+- f (u, v),
(4.2)
vt = 62vxx + g(u, v), with e > 0 small, travelling waves are often constructed by piecing or gluing several singular waves together using, for instance, geometric singular perturbation theory (see [91 ] for a review) or matched asymptotic expansions (see, e.g., [176,112]). These singular waves are travelling waves of (4.2) in the limit e --+ 0 in various different scalings of the spatial variable x or ~. In particular, the singular waves are stationary solutions of certain scalar reaction-diffusion equations, and their stability properties follow immediately from Sturm-Liouville theory (see, e.g., [83, Chapter XI]). The issue is to determine the stability properties of the travelling wave to the full Equation (4.2) for e > 0. This can often be achieved using the Evans function: We refer to [90,185] for results proving the stability of the fast pulses to the FitzHugh-Nagumo equation and to [15,47,70,88,127-129,142] and the references therein for various other results related to the stability of waves to singularly perturbed equations of the form (4.2). One particularly useful argument is provided by the so-called "elephant-trunk lemma" (see [71 ]) that shows that the Evans function of the full Equation (4.2) is often close to the product of the Evans functions for each of the two equations appearing in (4.2), properly scaled and appropriately evaluated (see [2,71 ] for details and applications). The Evans function can be used to test for instability using a parity-type argument. Suppose that the essential spectrum tess is contained in the open left half-plane; otherwise, the wave is unstable. The idea is that the Evans function D(A) is defined and real for all real A >~ 0. Suppose that the Evans function is positive, D(s ~> 3 > 0, for all sufficiently large real A. Note also that D(0) = 0 for any nontrivial travelling wave because of translation invariance. Hence, if D' (0) < 0, then at least one A, > 0 exists with D(A,) --0, and the wave is unstable, since A, is in the point spectrum rpt. The key is that there are computable expressions for the derivatives of the Evans function with respect to A and also with respect to parameters that appear in the underlying PDE (see [ 134,146,95] and Section 4.2.1). Also, the limiting behaviour of the Evans function D(A) as A -+ ~ can often be determined (see Section 4.2.2). The above parity argument has been used to derive instability criteria for solitary waves in Hamiltonian PDEs [134,21,22], for multi-bump pulses to reactiondiffusion equations [3,4,122,187], and for viscous shocks in conservation laws [72]. Lastly, the Evans function is also useful when computing the stability of solitary waves under perturbations. Suppose, for instance, that A = 0 is a zero of D(s with order m > 1. This typically occurs when the underlying PDE has continuous symmetries such as a phase invariance or Galilean invariance. Examples are the nonlinear Schr6dinger equation with m = 4 [183] and the complex Ginzburg-Landau equation with m = 2 [177]. If some of these symmetries are broken upon adding perturbations, then some of the eigenvalues at A = 0 may move away, and it is necessary to locate these additional discrete eigenvalues to determine stability. Using expressions for the derivatives of the Evans function with respect to A and the perturbation parameters as provided by [ 134,146,95], the Evans function can
1010
B. Sandstede
be expanded in a Taylor series, and its zeros near )~ = 0 can, in principle, be computed. We refer to [94] where this approach has been carried out for the perturbation of the nonlinear Schr6dinger equation to the complex Ginzburg-Landau equation. We emphasize that the perturbed eigenvalues can often be computed more efficiently using Liapunov-Schmidt reduction. The reason is that, near a given isolated eigenvalue )~, in the point spectrum of T, the Evans function D()~) is essentially equal to the determinant of the underlying PDE operator/2 restricted to the generalized eigenspace of)~,. Thus, upon adding a perturbation to the operator/2, the polynomial D 0 0 is perturbed, and we need to compute its zeros: in general, this is a difficult task. It is often far easier to investigate directly the matrix that represents L; restricted to the eigenspace of,k,. In other words, it is often easier to compute the eigenvalues of a matrix directly, using properties of the matrix, rather than finding zeros of the characteristic polynomial which may hide these properties. For instance, symmetries can often be exploited more efficiently. We refer to [ 106,151 ] where Liapunov-Schmidt reduction rather than the Evans function has been utilized. Below, we give an expression for the derivative D ~(0) of the Evans function D 0 0 at )~ = 0 and explore the asymptotic behaviour of D()~) for )~ ~ cx~ in more detail using Example 1. 4.2.1. The derivative D' (0). We assume that )~ = 0 is contained in the point spectrum of T, with geometric multiplicity one. In particular, we assume that T(0) is Fredholm with index zero. We denote the nonzero eigenfunction of ~. -- 0 by q)(~).3 Hence, q)(~) is the unique bounded solution (unique up to constant multiples) of d - - u = A(~; 0)u, d~ and we have span {(p(O) } -- N(P_ (0; 0))N R(P+(O; 0)). We choose the ordered bases [Ul (k) . . . . . uk00] and [Uk+l ()~). . . . . un(k)] of N(P_ (0;)0) and R(P+ (0;)~)), respectively, in the definition of the Evans function in such a fashion that u~ (0) = ~0(0),
uk+~ (0) = ~o(0).
Owing to Remark 3.4 and to the fact that T(0) is Fredholm with index zero, the adjoint equation d - - u = - A ( ~ ; 0)*u d~ also has a unique bounded solution ~r(~). The derivative of the Evans function D 0 0 at k = 0 is then given by D'(0) =
1
17i(0) 12
det[gr(0), U2(0) . . . . . Uk(O), 99(0), U k + 2 ( 0 ) , . . . , Un (0)]
3 If q(~) is the travelling-wave solution, then q)(~) = q1(~).
Stability of travelling waves
•
F
1011
(4.3)
(~ (~), B(~)~o(~)) d~.
This expression can be evaluated once 7t(~) and ~o(~) are known. Note that the right-hand side of (4.3) is a product of two terms: The nonzero determinant measures only the orientation of the basis in the brackets; note that 7t(0) is perpendicular to the vectors u j (0) at )~ = 0 as a consequence of Remark 3.5. The integral decides whether i, = 0 has higher algebraic multiplicity. Indeed, the integral is equal to zero if, and only if, B(-)~o(.) is contained in the range of T(0), see (3.12), which is the case precisely when ~, = 0 has algebraic multiplicity larger than one. This observation illustrates one relation between the statements in Section 3.3 and the Evans function. If the underlying PDE is Hamiltonian, then the derivative D' (0) is typically zero, and an expression for the second-order derivative D" (0) is needed. In [ 134], the quantity D" (0) has been related to the derivative of the momentum functional 4 with respect to the wave speed c. We refer to [ 134] for the details and to [21,22] for extensions that utilize a multisymplectic formulation of the underlying Hamiltonian PDE. 4.2.2. The asymptotic behaviour o f DO~) as )~ --+ co. We illustrate the typical behaviour of the Evans function D()~) in the limit as ~ ~ cc using Example 1. EXAMPLE 1 (continued). Consider the eigenvalue problem 5
(
D - * ()~U - Ou F ( Q ( ~ ) ) U - c V )
o P -1(~.-
,d
OuF(Q(~)))
-cD -l
u,
-
(4.4)
"
Changing variables according to =
,/Izl
v,
Equation (4.4) becomes
(o
0
I~I -I ou F ( Q ( ( / x / ~ ) ) )
_c x/~-
l D- I
(4.5)
In the limit as I)~l ~ ec, we obtain the constant-coefficient equation
(
U~
0
id)
(4.6)
A conserved functional associated with the translation symmetry; see Section 8. 5 Our notation in this example is ambiguous since we denoted the diffusion matrix D of the reaction-diffusion system and the Evans function D(~.) by the same letter.
4
1012
B. Sandstede
The Evans function D0~) for the rescaled equation (4.6) can be computed since there is no dependence on ~. We focus on the case )~ 6 R +, so that arg)~ -- 0" If the diffusion matrix is given by D -- diag(dj), then the eigenvalues of the matrix
(0 ) D-I
are given by l)j - - ~ / ~ and I)j+N = --~//'-dj for j -- 1. . . . . N, and the associated eigenvectors are
fij = (ej, v ~ - l e j ) , where
{tj+N -- (--ej, ~-d~-lej),
j = 1 . . . . . N,
ej denote the canonical basis vectors in ]1~N. In particular,
-
D()~) = det[tTl . . . . .
/~2N] -- det
( id
D_I/2
- i d ) = det[2D - J/2] > 0 D-I/2
for )~ > 0. Since the coefficient matrices in Equations (4.5) and (4.6) are close to each other, uniformly in ~', for )~ sufficiently large, their Evans functions are close uniformly in )~ as a consequence of Theorem 3.1. In particular, the Evans function D 0 0 of (4.4) never vanishes for all real, sufficiently large )~. For the parity argument mentioned above, we would need to compare the Evans function D100 as used in Section 4.2.1 to the Evans function D2 ()~) used in Example 1 above. It is not difficult to see that sign DI (~) = sign D2 (~.) for all large real ~. provided the ordered bases [ut(0) . . . . , U N ( 0 ) ] and [ill . . . . . /gN] of N(P_(0; 0)) have the same orientation, as do the ordered bases [ u u + l ( 0 ) , . . . , U Z N ( 0 ) ] and [tTu+l . . . . . tTZU] of R(P+(0; 0)). Note that, in set-up of Example 1, we have k -- N since we assumed that the essential spectrum is contained in the left half-plane.
4.3. Extension across the essential spectrum We defined the Evans function D()~) for )~ not in the essential spectrum Zess since we were interested in locating the point spectrum. If the essential spectrum is contained in the open left half-plane, then knowing the Evans function for ~ to the right of the essential spectrum, i.e., in the closed right half-plane, is all we need to decide upon stability. For two important classes of PDEs, however, the essential spectrum will always touch the imaginary axis: these are conservation laws on the one hand and integrable PDEs such as the nonlinear Schr6dinger equation
iUt + Uxx + JUJ2U-O,
U ~ C,
Stability of travelling waves
1013
and the Korteweg-de Vries equation
Ut + Uvxx + U Ux - O ,
U 6 IR,
on the other hand. Thus, suppose that we study the stability of a pulse whose essential spectrum lies on the imaginary axis as is the case for the NLS and the KdV equation. Suppose further that we obtained spectral stability of the pulse, so that the spectrum lies in the closed left half-plane. Assume then that the PDE is perturbed in such a fashion that the pulse under consideration persists as a pulse for the perturbed PDE. 6 The issue is then the stability of the pulse to the perturbed PDE. The essential spectrum can again be calculated easily (see Section 3.4), while perturbations of isolated eigenvalues of the unperturbed PDE can be investigated using Liapunov-Schmidt reduction or the Evans function (see Section 4.2). There is, however, an additional mechanism that can create an instability: Recall that we assumed that the essential spectrum resides on the imaginary axis. Upon adding the perturbation, eigenvalues may bifurcate from the essential spectrum leading to additional point spectrum close to the essential spectrum (see Figure 5(c)). These eigenvalues are not regular perturbations of the point spectrum of the unperturbed pulse, but are created in the essential spectrum. Since the new eigenvalues bifurcate from the essential spectrum, it is not possible to use Liapunov-Schmidt reduction or standard perturbation theory as Fredholm properties fail. The Evans function, however, can be used to locate and track such eigenvalues as we shall see below. Consider the equation d - - u -- A(~" A)u
(4.7)
d~
(~)
(b) X
X
A w
o[_, X
~,
(c)
I X n
ol ~-~ess
A
.k q[P
.,...
~-]ess
',
',/~o l l l l l l
, l
Fig. 5. Plotted is the complex A-plane. The insets represent the spatial spectra of the matrix A0 (A) in different regions of the A-plane. Two different spatial eigenvalue configurations near the essential spectrum are plotted: In (a) a single spatial eigenvalue crosses the imaginary axis when A crosses through tess; the dotted line in the inset is given by Re v = 1;. In (b) two spatial eigenvalues cross simultaneously but in opposite directions when A crosses through tess. In (c) we plotted the unperturbed essential spectrum (dashed line) as well as the perturbed essential spectrum (solid line) and an additional eigenvalue that moves out of the essential spectrum upon perturbing the operator. 6 We refer to Section 2.2 for examples of such perturbations for the NLS and the KdV equation.
1014
B. Sandstede
and assume that the limit lim A(~;
X) --
A0(X)
exists. On account of the results stated in Section 3.4.4, we have that )~ is in the essential spectrum of T precisely when A0(~) has at least one spatial eigenvalue on the imaginary axis (see Figure 5). If A000 is hyperbolic, then (4.7) has exponential dichotomies on ]K+ and IK- with projections P+ (~;~) and P_ (~; ,k), respectively. An element ~ e C is in the point spectrum precisely if N(P_(O; X)) A R(P+(O; X)) # {0}. The Evans function D(~) measures intersections of the two subspaces N(P_(0; ,k)) and R(P+ (0;)0). It is defined for any ,k for which A0(,k) is hyperbolic. The key idea is to find an analytic extension of the Evans function D 0 0 for ,k e tess. Zeros of the extended function D(,k) for ,k e Sess correspond to possible bifurcation points of point spectrum: Upon adding perturbations, these zeros may move out of the essential spectrum (see Figure 5(c)). We illustrate the analytic extension of the Evans function in Figure 5. Throughout this section, we assume that )~ is close to the essential spectrum Zess. References for analytic extensions of the Evans function are [ 134,72,97]. First, consider the set-up shown in Figure 5(a). When )~ crosses through Zess from right to left, a spatial eigenvalue v of A000 crosses through ilk from right to left. For ~ to the right of Z'ess, the spectral projection P~ 00 of the matrix A0(~) that projects onto the stable eigenspace along the unstable eigenspace is well defined (see (3.4)-(3.5)). Note that stable and unstable spatial eigenvalues for ~ to the right of Zess correspond to the bullets and crosses, respectively, in Figure 5(a). For )~ on and to the left of Z'ess, we denote by P~ (X) the spectral projection of the matrix A0(~.) associated with the two spectral sets consisting of the bullets and the crosses, respectively, in Figure 5(a). The projection is well defined as long as )~ is close to tess and as long as spatial eigenvalues cross only from right to left through iR as ~ crosses from right to left through ~'ess- In other words, rather than dividing spec(A0(~)) into stable and unstable spatial eigenvalues, we distinguish between spatial eigenvalues v with Re v < 7; and Re v > r/where r/< 0 is close to zero such that the line Re v = r/separates the stable spatial eigenvalues from the formerly unstable spatial eigenvalues that crossed the imaginary axis (see Figure 5(a)). The discussion at the end of Section 3.2 shows that there are projections P+ (~;)~) and P_ (~;)~), defined for ~ e R + and ~ 6 IK- respectively, that are defined and analytic in k for all ~. close to Zess such that
P+(~;z)
~P~(Z), ~ + ~ .
The subspace R(P+(0; )~)) consists of precisely those initial conditions that lead to solutions u(~) of (4.7) that satisfy lu(~)l ~< eO~lu(0)l for ~ ~> 0. The subspace N(P_(0; X)) consists of precisely those initial conditions u(0) for which lu(~)l ~< e ~ lu(0)l for ~ - o c whenever )~ is to the left of Sess.
Stability of travelling waves
1015
The Evans function D(A) can now be defined as in Section 4.1 via D ( A ) = N(P_(0; A))/x R(P+(0; A)), so that zeros of D(A) correspond to nontrivial intersections of R(P+(0; A)) and N(P_ (0; A)). Note that zeros of D(A) for A to the right of 2Tess correspond to eigenvalues of 7-, but that zeros to the left or on s have no meaning for 7-. The latter zeros are commonly referred to as resonance poles. We conclude that eigenvalues can bifurcate from the essential spectrum only at zeros A, E 1;ess of the extended Evans function D(A). Suppose that this extension is computed, and its zeros determined. Upon adding perturbations to (4.7) that depend on the small perturbation parameter e, a perturbation analysis of the analytic function D(A; e) near each zero then reveals whether the zeros move to the right or to the left of 22ess. This program has been carried out for the generalized Korteweg-de Vries equation U, + U~ ~~ - c U~ + U P U~ -- O,
U ~ R,
by Pego and Weinstein [134,135]: they showed that pulses destabilize at p = 4 where an eigenvalue emerges from the essential spectrum, given by the imaginary axis iN, at A -- 0. An alternative, but equivalent, way of extending the Evans function in the situation shown in Figure 5(a) consists of using the transformation (3.9) v(~) - u(~)e -'1~ which replaces (4.7) by d d~
v-
(A(~" , k ) - ~)v.
(4.8)
For 7; < 0 close to zero, the asymptotic matrix A(A) - r/has imaginary eigenvalues for values of A on a curve Ze~ss that is strictly to the left of tess (see Figure 5(a)). Thus, the Evans function for (4.8) is defined for all A near tess and coincides with the Evans function of (4.7) for A to the right of rest. Next, we consider the case illustrated in Figure 5(b). In this situation, two spatial eigenvalues cross the imaginary axis simultaneously in opposite directions as A crosses through Zess. We are interested in extending the Evans function, defined in the region to the right of Zeus, in an analytic fashion to the left of rest. The procedure outlined above for case (a) seems to fail since there is no spectral gap anymore. Recall that the Evans function D(A) for A to the right of tess is defined by D(A) = det[u I(A) . . . . . u,, (A)], where [ul(A) . . . . . uk(A)] and [uk+l (A) . . . . . u,,(A)] are ordered bases of N(P_(0; A)) and R(P+ (0; A)). One way of obtaining an analytic extension of the Evans function in this setup is to analytically extend the exponential dichotomies ~ _ (~, 0) for ~ ~> 0 and 4~u_(~, 0) for ~ ~< 0; recall that 4~_(0, 0) - P+(0; A) and 4,u(0, 0) - i d - P _ ( 0 " A). For simplicity, we concentrate on ~/> 0.
1016
B. Sandstede
We begin by extending the projections of the asymptotic constant-coefficient equation d
--u
d~
(4.9)
= Ao()~)u.
The stable and unstable spatial eigenvalues of A00,) for )~ to the right of Z:ess correspond to the b u l l e t s and c r o s s e s , respectively, in Figure 5(b). For )~ on and to the left of Z:ess, we denote by P~ 00 the spectral projection of the matrix A0()~) onto the generalized eigenspace associated with the bullets along the eigenspace associated with the crosses. In other words, we assume that we can divide the spatial spectrum of A0()~) into two disjoint spectral sets according to whether the spatial eigenvalues are in the left or right half-plane for ~ to the right of Z:ess; thus, we do not allow that formerly stable and unstable spatial eigenvalues cross through ilR at the same point ik. 7 Using Dunford's integral [ 100, Chapter 1.5.6], we obtain spectral projections, which we still denote by P~ (~.), that depend analytically on )~ for ~ close to the essential spectrum Z:ess. The exponential dichotomies of (4.9) are ea~
and
eA~
(4.10)
for ~. in a, possibly small, neighbourhood of Z:ess, where P~ ()~) = i d - P ~ (~). We can also divide the spatial spectrum of A0(~.) into two different disjoint sets, namely the strong stable and the center-unstable spectrum: the strong stable spectrum consists of all stable eigenvalues that keep a uniform distance from the imaginary axis as we vary % near the essential spectrum, while the center-unstable spectrum is its complement. The strong stable eigenvalues correspond to the leftmost b u l l e t in Figure 5(b), while the center-unstable eigenvalues consist of the rightmost b u l l e t and all c r o s s e s in Figure 5(b). We denote the associated spectral projections by P~s(A.) and p~u(~.) = id_p~s(A.). These projections are again analytic in )~ for )~ close to the essential spectrum. In the next step, we construct the evolution operator @s(~, 0) for the full Equation (4.7). Thus, assume that @s(~, ~) is associated with (4.7) on R + for )~ to the right of the essential spectrum. Roughly speaking, analyticity of these operators with respect to )~ is equivalent to uniqueness. Thus, we shall find a way to extend these operators uniquely to the region to the left of tess. The idea is to seek an extension of these dichotomies by requiring that the extended evolution operators approximate the dichotomies (4.10) of the asymptotic constant-coefficient equation (4.9) as best as possible. Intuitively, such a choice should be possible provided the coefficient matrix A (~;%) converges rapidly enough to the asymptotic coefficient matrix A0(~.). In other words, the solutions of (4.7) should converge rapidly towards solutions of (4.9) provided the coefficient matrix A(~; )~) converges rapidly to A0(%). This is indeed the case as long as the distance, in the real part, between the rightmost formerly stable spatial eigenvalue and the leftmost formerly unstable eigenvalue, i.e., the amount of overlap of the two spectral sets, is smaller than p, where p is the exponential rate with which the coefficient matrices approach each other (see (4.11) below). This result is referred to as the Gap Lemma [72,97]. To illustrate this result, we therefore assume that
Ia( ; x) -
Ao()~)[ ~< Ce -pIll
7 This assumption is actually not necessary, and we refer to [97] for the details.
(4.11)
Stability of travelling waves
1017
as [~] --+ oo for some p > 0 independently of X. To construct the extension of 9 s (~, 0), we define the correction q/s(~, 0) by 0 s (~, O) -- e A~
P(~(Z) --F ~s (~, O)
and seek the correction tps (~, 0) as a solution to the integral equation qjs(~, 0) -- f ~ e A~(~)(~-T)Pocu (X)A(r" X) [eA0(Z)r Pos (X) + tps (r, 0)] dr +
fo
eA~ x [en~
k) -F tps('r, 0)] d'r ,
~ >/0,
(4.12)
where A(~" X ) = A(~" X ) - A o ( X ) - O(e-Pl~l). The above integral equation coincides with the integral equation (3.8), which we encountered in Section 3.2 when we constructed regular exponential dichotomies, upon substituting the above expression for 9 s and setting ~" -- 0 in (3.8). Equation (4.12) is also reminiscent of the integral equation that describes strong stable manifolds; it has a unique solution (possibly after replacing ~ -- 0 by ~ --- L in the second integral for some L >> 1 to make the right-hand side of (4.12) a contraction) that gives the correction qjs. The exponential decay in (4.11) is necessary to compensate for the exponential growth of the solution operators in (4.10). Hence, we can construct analytic extension of the dichotomies for (4.7), and thus of the Evans function D(X), for k to the left of the essential spectrum. Slightly different constructions have been carried out in [72,97]. In [72], the analytically extended Evans function has been used to establish instability criteria of shock waves to conservation laws. In [97,98,96, 110], this approach was used to prove stability and instability of solitary waves to perturbations of the nonlinear Schr6dinger equation. We also refer to [45-47] for applications, and extensions, of the analytic extension of the Evans function across the essential spectrum to the stability of pulses in singularly perturbed reaction-diffusion equations with a strong coupling between the fast and slow subsystems.
5. Spectral stability of multi-bump pulses In this section, we consider the stability of multi-bump pulses. Suppose that we know that a given PDE supports a stable pulse Q(x - cot) that travels with speed co. We refer to this pulse as the primary pulse. Typically, such a pulse is then accompanied by spatiallyperiodic wave trains PL (x -- CLt) that resemble infinitely-many equidistant copies of the pulse (see Figure 6 (a) and (b)). These wave trains have spatial period 2L and wave speed CL; they exist for any sufficiently large spatial period L, and the wave speeds satisfy CL --~
1018
B. Sandstede 2L
2L1
0
,~1
2L2
~2
~a
Fig. 6. Plots of the primary pulse Q(~) in (a), a spatially-periodic wave train with period 2L in (b), and a 3-pulse with distances 2L! and 2L2 in (c).
(a)
(b)
9
9
f.
', O"
0o
Fig. 7. Plots of the spectra of the primary pulse in (a), a spatially-periodic wave train in (b), and a 3-pulse in (c).
co as L --+ ocz. Besides these long-wavelength pulse trains, multi-bump pulses may exist which are travelling waves that consist of several well-separated copies of the primary pulse. Associated with an e-pulse, consisting of e copies of the primary pulse, are the distances 2Lj . . . . . 2 L e - i between consecutive copies and the locations ~l . . . . . ~e of the individual pulses (see Figure 6(c) for a plot of a 3-pulse). Throughout the entire section, we assume that consecutive pulses in a wave train or an e-pulse are well separated, so that L and Lj a r e sufficiently large, say larger than some number L, >> 1. We are interested in the spectra of the wave trains and the e-pulses (if they exist) that accompany the primary pulse. We assume that the primary pulse is spectrally stable, so that its spectrum is contained in the open left half-plane with the exception of a simple eigenvalue at )~ = 0, caused by the translation symmetry (see Figure 7(a)). We shall locate the spectrum of an e-pulse that accompanies the primary pulse: The essential spectrum of an f-pulse is close to the essential spectrum of the primary pulse as it is determined by the asymptotic rest state (see Section 3.4.4). It remains to find the point spectrum. We claim that there are precisely e eigenvalues in the spectrum of an e-pulse near each eigenvalue of the primary pulse (see Figure 7(c)). Recall that, as usual, all eigenvalues are counted with their multiplicity. To make our claim plausible, we argue heuristically and focus on the eigenvalues near )~ -- 0. Consider the 3-pulse plotted in Figure 6(c). Each individual pulse in the 3-pulse resembles the primary pulse, and the individual pulses are well separated. Thus, if we change the position of one of the pulses, the other pulses are not affected. Translating the jth pulse corresponds to adding e Q1( 9- ~j) to the 3-pulse for e small. Hence, there should be three eigenvalues near )~ = 0, and the associated eigenfunctions should be linear combinations of Q' (. - ~ j ) for j = 1, 2, 3, since adding small multiples of these eigenfunctions to the 3-pulse does not affect the 3-pulse much. The key to this argument is that the pulses are exponentially localized and well separated. Thus, an e-pulse should have e eigenvalues near ~ -- 0 with eigenfunctions of the form Y~'~=1 dj Q' (. - ~ j ) .
Stability of travelling waves
1019
The larger the distances between consecutive pulses in the g-pulse, the closer should these s critical eigenvalues be to )~ = 0. If the primary pulse is stable, then an s is stable provided its s - 1 nontrivial critical eigenvalues near ~ = 0 move into the left half-plane. Similar arguments apply to the wave trains. Since a wave train consists of infinitely many pulses, there should be many eigenvalues near )~ = 0. In fact, for each eigenvalue of the pulse, the wave train has a circle of eigenvalues that is parametrized by the spatial Floquet exponent Y (see Section 3.4.2, in particular (3.16), and Figure 7(b)). To set-up the problem, consider the travelling-wave ODE d
--.u=f(u,c), d~
(5.1)
where c denotes the wave speed. We assume that the rest state is u = 0, so that f (0, c) = 0 for all c. Suppose that q(~) is a pulse to u = 0 for c = co. We assume that 0u f ( 0 , co) is hyperbolic, so that p < min{[Re v]; v ~ spec(O~,f(O, co))} < 3 p / 2 for an appropriate p > 0; it is advantageous to choose p as large as possible as it appears in the estimates for certain remainder terms (see below). We remark that, if the travelling waves are, in fact, standing waves so that c -- 0, then the underlying PDE sometimes features the reflection symmetry x ~ - x that manifests itself as a so-called reversibility of the travelling-wave ODE (5.1). We would then be interested in symmetric waves that are invariant under the reflection x ~ - x . We refer to [ 174,181 ] for more background on reversible ODEs. The PDE eigenvalue problem associated with the pulse q (~) is of the form d
- - u = [Ouf (q(~), co)-+- )~B(se)]u.
d~
We make the following assumptions. HYPOTHESIS 5.1. The only bounded solution to the variational equation
d - - u -- O . f ( q ( ~ ) , co)u d~
(5.2)
is given by q ' (~ ), up to constant scalar multiples. As a consequence, the adjoint variational equation
d - - u = - O . f (q(~), co)*u d~
(5.3)
has a unique, up to constant multiples, bounded nonzero solution which we denote by 7t (~) (see Section 3.3). We refer to Figure 8 for the geometry of the pulse q (~) and the solution
B. Sandstede
1020
W LI
q(-L)
q(L) Fig. 8. The geometry of the pulse q(~) and the solution ~p(~) to the adjoint variational equation. Note that ~(~) _L (Tq(~)WS(0) + Tq(~)WU(0)) for all ~ (see Remark 3.5), i.e., ~(~) is perpendicular to the tangent spaces of both the stable and the unstable manifold 8 of the equilibrium that is approached by the pulse.
HYPOTHESIS
M=
5.2. We assume that
S
(~p(~), Bq'(~))d~ = -
(X)
F
(~P(~),Ocf(q(~),co))d~ :riO
O0
is not zero (recall (2.8)). In the notation used earlier, the above hypotheses say that 0 E ~V'pt, N(T(0)) = span{q'} and D'(0) r 0, i.e., that ~ = 0 is a simple eigenvalue of T (see Sections 3 and 4). In other words, we assume that )~ = 0 is an isolated simple eigenvalue of the pulse q (~). The next hypothesis is not always needed. HYPOTHESIS 5.3. We assume that the point spectrum ~V'pt of the primary pulse is a discrete subset of C. We are interested in the stability of 2L-periodic wave trains PL (~) and e-pulses qe(~) that accompany the primary pulse q (~). Throughout this section, we assume that, for a sufficiently small constant 6 > 0, we have Ic - c0l < ~,
u(~) E Ha({q(~')" ~" E ~ } )
for all ~ 6 R
(5.4)
for any wave u(~) with wave speed c that we consider below. In particular, we assume that the period 2L of any wave train we may consider is sufficiently large. Furthermore, 8 The stable manifold W s (P0) of an equilibrium u = P0 consists of all solutions that converge to that equilibrium as ~ --+ ~ ; analogously, its unstable manifold WU(p0) consists of all solutions that converge to P0 as --+ -cx~ (see [14,33,80,107]).
Stability of travelling waves
1021
we denote by Z ( u ) = ~'pt(U) U tess(U) the various spectra of a wave u(~) with speed c, computed with respect to the operator Z , 0 0 = --
d~
-
O, f ( u ( . ) ,
c) -
AB(.).
5.1. Spatially-periodic wave trains with long wavelength
Suppose that PL (~) is a 2L-periodic wave-train solution of (5.1) with wave speed CL, so that PL ( - L ) = PL (L). We comment later on the existence of such wave trains (see [11, 111,181]). We recall from Section 3.4.2 that A is in the spectrum of PL (~) if, and only if, the boundary-value problem d d~U -
[ O u f ( P L ( ~ ) , c L ) + AB(~)]u,
I~1 < L,
(5.5)
u(L) = eiyu(-L)
has a solution u (~) for some y 6 R. THEOREM 5.1 [69]. Assume that Hypothesis 5.3 is met. For every sufficiently small e > O, a ~ > 0 exists with the following properties. If PL (~) is a 2L-periodic wave-train solution o f (5.1) such that (5.4) is met, then the following statements are true. 9 2 7 ( P L ) = ress(PL) C b/e(r(q)). 9 For any A, 6 rpt(q) with multiplicity m, and f o r any fixed spatial Floquet exponent y E [0, 27r), (5.5) has precisely m solutions, counted with multiplicity, in the e-neighbourhood o f A,.
Besides the topological proof given in [69], Theorem 5.5 can also be proved using the roughness theorem of exponential dichotomies; we refer to [ 155, Section 4]. REMARK 5.1. It follows from the results in [155, Section 5.2] that the essential spectrum Sess(q) is also approximated by the spectrum S (pL) of the wave trains. Thus, if the spectrum I7 (q) of the primary pulse is contained in the open left half-plane with the exception of a simple eigenvalue at A = 0, then the spectrum 27 (pc) of the wave train is contained in the open left half-plane with the exception of a circle A(V) of simple eigenvalues that is parametrized by y 6 [0, 2rr] with A(0) = 0. To conclude (in)stability of the wave train, it is necessary to locate this circle of critical eigenvalues. THEOREM 5.2 [156].Assume that Hypotheses 5.1 and 5.2 are met. There is a ~ > 0 with the following properties. Assume that PL (~) is a 2L-periodic wave-train solution o f (5.1) such that (5.4) is met. Equation (5.5) has a solution f o r g E IR and A close to zero if and
1022
B. Sandstede
only if 1 M ((eiy - 1)(~(L), q ' ( - L ) ) + ( 1 - e - i • + R(V, L),
(5.6)
where R(y, L) is of the form g(y, L)-
(e iy -- 1)O(e -3pL) + ( 1 - e-i•
The associated solution u (~) of (5.5) is given by u(~s)--eik•
~ 6[(2k-1)L,(2k+
l)L],
kEZ.
Note that the sign of d2
~ Re)~[ dy 2
1
q' ( - L ) ) + ( ~ ( - L ) , q
'(L)))
decides, to leading order, upon stability. Reference [156] contains more general results, with better estimates for R(F, L), that are applicable even if )~ has larger geometric multiplicity due to the presence of additional continuous symmetries. Before we illustrate the theorem by examples, we outline its proof as it provides some insight as to the role of the scalar products appearing in (5.6) (see also Figure 8). 5.1.1. Outline of the proof of Theorem 5.2. Since the ideas for the proof of the stability theorem 5.2 are the same as those that give existence of wave trains, we begin by introducing Lin's method [ 111,143] that can be used to prove existence. Thus, to set the scene, suppose we want to prove the existence of the periodic orbits pc (~) of period 2L near a given homoclinic orbit q (~) to the equation d m u -- f (u, c), d~
u E ]R2,
in the plane, where c denotes the wave speed. Hence, we shall find functions pc (~) and wave speeds cc such that d d~
pc (~) - f (pc (es), CL),
I~1 < L,
PL (0) 6 q(0) + span{~(0) } -- A, PL (--L) = pL (L) and such that cc is close to co and PL (~) is close to q(~) for I~1 < L. Note that A is a line attached to q (0) and perpendicular to the vector field (see Figure 9(a)). To solve this
Stability of travelling waves (b)
(
1023 (
Fig. 9. The homoclinic orbit q(~) and the transverse section A = q(0) + span{~p(0)} that is attached to q(0) are plotted in (a). In (b) the solution u(~, c, L) to (5.7) is plotted for c-r co. In (c) the perturbed stable and unstable manifolds, denoted by u(~; c, ec) are plotted for c =/: co; the distance between the unstable and the stable manifold is, to leading order, given by u(0-; c, co) -u(0+; c, ec) = - M ( c - co). Lastly, in (d) we plotted the unique solution u(~; co, L) to (5.7) for c--co.
problem, we shall seek functions u(~" c, L), defined for all c close to co and all L large, that may have a discontinuity 9 at ~ -- 0 such that d d--}-u(~" c, L) -- f(u(se; c, L), c),
I~l < L,
u(O+;c,L) E q ( 0 ) + s p a n { O ( 0 ) } - - A ,
(5.7)
u ( - L " c, L) -- u(L" c, L) (see Figure 9(b)). Such a solution is the desired periodic wave train if, and only if, 3 (c, L) "-- u ( 0 - " c, L) - u(0+; c, L) -- 0 so that u(~" c, L) is continuous at ~ -- 0. Hence, we focus on solving (5.7). First, we pretend that we can expand the solution u(~" c, L) as a Taylor series in (c, L) centered at (c, L) -(co, e~). In other words, we write u(~" c, L) -- u(~" c, oc) 4- u(~" co, L),
(5.8)
where u($; c, oc) satisfies (5.7) for L = ec (see Figure 9(c)), while u(~; co, L) satisfies (5.7) for c = co (see Figure 9(d)). Note that the solution u(~; c, ec) of (5.7) with L = oc are precisely the stable and unstable manifolds: in other words, u($;c, c~) parametrizes the stable manifold for ~ ~> 0 and the unstable manifold for ~ ~< 0 with a discontinuity at -- 0 (see Figure 9(c)). O w i n g to M e l n i k o v theory [ 111 ], the j u m p at ~ = 0 is given
( ~ ( 0 ) , u(0-" c, ~ )
--(c-co)
- u(0+" c,
~))
(g/(~), Ocf(q(~),co))d~ + O([c - co[ 2) (N3
= -M(~
- co) + O(1~ - ~ol2).
9 If u(~) has a discontinuity at ~ =0, we define u(0-) = lim~s0 u(~) and u(0+) = lim~,,~0 u(~).
(5.9)
B. Sandstede
1024
It remains to find u (~; co, L). Hence, set c = co and write u(~; co, L) = q ( ~ ) + v(~),
(5.~o)
then u(~; co, L) satisfies the ODE in (5.7) if, and only if, v(~) satisfies d d---~v -- f (q(~) + v, co) - f (q(~), co) = Ouf (q(~), co)v + O({v{2), I~l < L .
(5.11)
Omitting the higher-order term O(Iol2), the solution to this equation can be written, for instance, as
v(~) = c I ) ( ~ , - L ) v ( - L ) , v(se) = r
e, L)v(L),
~>0, ~ - v s > 0 for every v 6 s p e c ( 0 , f ( 0 , co)) with v -r v s (see Figure 10(a)). It follows from [34, Chapter 3.8] or [83, Chapter X.13] that there is a 6 > 0 and eigenvectors v0 and w0 of 0 , f ( 0 , co) and 0, f ( 0 , co)*, respectively, belonging to the eigenvalue v s such that q'(~) -- e v~ vo + O(e-(Iv'l+~)~),
gr ( - ~ ) -- e ~ wo + O(e -(1r
as ~ --+ oc. Typically, the vectors v0 and w0 are nonzero. Furthermore, we have
Iq'(-~)l + 10 The leading, or principal, eigenvalues of a hyperbolic matrix are those closest to the imaginary axis.
1026
B. Sandstede
(a) A w
A w
(b) =
A w
i ! ',
Fig. 10. The spectrum of Ouf(O, co) and the shape of the tails of the pulse q(~) are plotted for two different cases: in (a) the leading eigenvalue v s is simple and real with negative real part, whereas the leading eigenvalues in (b) are a pair of simple, complex-conjugate eigenvalues with negative real part.
as ~ --+ c~. Upon substituting these expressions and estimates for q' and ~ into (5.12), we obtain (vO, wo} (1 -- e-i• M
2v~L
for 9/ 6 [0, 2zr], upon omitting terms of higher order. In particular, the wave trains are spectrally stable for all large L if (v0, w0)M < 0 and spectrally unstable for all large L if (vo, w o ) M > O.
The second generic case is that the leading eigenvalues of Ouf (0, co) are complex conjugate and simple. We again assume that their real part is negative (see Figure lO(b)). Hence, a pair of simple complex-conjugate eigenvalues v s, ~v E spec(Ouf(O, co)) exists such that [Rev[ > - R e v s > 0 for every v ~ spec(Ouf(O, co)) with v-~ v s, b-~. We assume that Im v s ~ O. Exploiting the expansion q'(~) -- Re[eVS~ v0] q- O(e-(I RevSl+~)~), lp(--~) -- Re[eV~ w0] + O(e -(I RevSl+~)~)
(5.13)
for ~ --+ oe (see [34, Chapter 3.8] or [83, Chapter X.13]), we end up with the expression ~=
a
M
sin(2L Im v s + b)(1 - e -i•
2L Re us
for the circle of critical eigenvalues near )~ = 0. Here, a and b are certain real constants. Hence, if a ~ 0, which is equivalent to v0 ~ 0 and w0 ~ 0, then the periodic wave trains change their PDE stability periodically in L regardless of the signs of a and M. This is not too surprising as it is known that, in the case shown in Figure 10(b), the periodic orbits to (5.1) undergo many saddle-node and period-doubling bifurcations as L is varied [ 170,41 ]. At each such bifurcation, the circle of critical eigenvalues crosses through the imaginary axis, and the wave trains either stabilize or destabilize: in the case of a period-doubling, for instance, (5.5) exhibits solutions at )~ - 0 for both y - 0 and y = Jr. Whereas the solution with y - 0 is enforced by the translation symmetry, the eigenvalue with y = zr should cross the imaginary axis upon unfolding the period-doubling bifurcation. Analogous results are true for wave trains near symmetric pulses provided (5.1) is reversible (see [156] for details and applications).
Stability of travelling waves
1027
The above results have been applied in [ 156] to the wave trains that accompany the fast pulse in the FitzHugh-Nagumo equation as well as to wave trains that arise in the fourthorder equation from Example 2.
5.2. Multi-bump pulses In this section, we discuss the stability of g-pulses that consist of g well separated copies of the primary pulse 9 Recall that, if the primary pulse is spectrally stable with only one simple eigenvalue at )~ = 0 and with the rest of the spectrum in the open left half-plane, then the spectrum of an g-pulse contains g critical eigenvalues near )~ - - 0 , and the rest of the spectrum is again contained in the open left half-plane, bounded away from the imaginary axis. The next theorem provides a method of computing the location of the g critical eigenvalues. THEOREM 5.3 [146]. Assume that Hypotheses 5.1 and 5.2 are met, then a ~ > 0 with the following properties exists. Assume that qe(~) is an g-pulse with wave speed ce and distances 2L l . . . . . 2 L e - l such that (5.4) is met. The equation d - - u - - [ O . f ( q e ( ~ ) . ce) + )~B(~)]u
d~
has a bounded nonzero solution u(~) f o r I~1 < 6 if and only if
D ( ) ~ ) - det[A - M)~ + R(/k)] - - 0 The g x g matrix A is tridiagonal and given by --al --bl A ~_.
al bl - a2 -b2
a2 b2 - a3
a3
",,
,,
-be-~
be-~
with aj - - ( ~ / ( L j ) . q ' ( - L j ) ) .
bj - - ( g / ( - L j ) , q ' ( L j ) )
f o r j = 1 . . . . . g - 1. The remainder term R()~) is analytic in )~ and satisfies
R0~) -- O(I)~le -pL + e 3PL). where L = minj=l ..... e-l {Lj}.
B. Sandstede
1028
We remark that [ 146] contains a stronger result with better estimates for the remainder term R 0 0 . The proof of Theorem 5.3 can be found in [146] (see also [147] for a less technical proof in R2). The idea of the proof is as outlined in Section 5.1.1 except that we get matching conditions for each individual pulse. The theorem can be generalized to the situation where the eigenvalue )~ = 0 of the primary pulse has higher geometric multiplicity due to additional continuous symmetries (see [148]). Theorem 5.3 states that the critical eigenvalues of the PDE linearization about an g-pulse are given as the eigenvalues of the tridiagonal matrix A, up to the factor M - l , provided we ignore the remainder term R(~). The matrix A can be thought of as the restriction of the PDE operator to the generalized eigenspace belonging to the critical eigenvalues. Note that
Av--O,
v-----(1. . . . . 1)*,
(5.14)
so that the vector (1 . . . . . 1)* corresponds to the translation eigenvalue ,k = 0 of the g-pulse. The entries of the matrix A are again scalar products similar to those encountered for the wave trains in Section 5.1. The only information needed to compute the entries of A are the distances 2Lj between consecutive pulses in the g-pulse. 5.2.1. Strategiesfor using Theorem 5.3. Hence, we first comment on a general approach, namely Lin's method [ 111,143], towards existence of multi-bump pulses that provides us in particular with the distances of bifurcating multi-bump pulses. Afterwards, we illustrate how the eigenvalues of A can be computed using the information gathered from the existence results. It has been proved in [111,143] that an g-pulse with wave speed c and distances {2Lj }j-I .....e-I bifurcates from the primary pulse if, and only if, the equation
M(c-co) = ( ~ ( - L j _ l ) , q ( L j _ l ) ) - ( ~ ( L j ) , q ( - L j ) ) + O ( e -3pL)
(5.15)
is satisfied for j = 1. . . . . g, where we set L0 = Le = oc and L = min{Lj }. We remark that [143,150] contain more general results with better estimates for the remainder term. We refer to Section 5.1.1 for the idea that leads to (5.15). Thus, once the tails of the pulse q (~) and the adjoint solution gt (~) are known, Equation (5.15) can be used to investigate the existence of multi-bump pulses. If such pulses exist, their half-distances L j can be fed into the matrix
A-
--al
al
-bl
bl --ae
ae
-b2
b2 - a 3
",
a3
(5.16)
".o
-be-i
be-1
with
aj =(O(Lj),q'(-Lj)),
bj --(~(-Lj),q'(Lj))
that determines the critical PDE eigenvalues and thus stability of the multi-bump pulses.
Stability of travelling waves
1029
Before we explore examples, we comment on general strategies for solving (5.15) and for computing the eigenvalues of the tridiagonal matrix A in (5.16). Let v s < 0 and v u > 0 denote the real parts of the leading stable and unstable eigenvalues of the matrix 0, f (0, co). Assuming that the leading eigenvalues are semi-simple, we have (gr(L), q ( - L ) )
- O(e-2~uL),
(~p( - L ) , q' ( L ) ) - O(e 2v~c)
(5.17)
(see Section 5.1.2). Typically, we have either ]vS[ > v u or IvS[ < v u so that one of the two scalar products in (5.17) is of higher order. Using appropriate scalings and utilizing the implicit-function theorem, it can be verified that the higher-order scalar product can be dropped from the existence Equation (5.15) and from the matrix A in (5.16) (see [145,146, 150]). The remaining equation is then much easier to analyse. Note that dropping either the entries aj for [vs[ < v u or else the entries bj for [vS[ > v u makes the matrix A either superdiagonal or subdiagonal: in either case, its eigenvalues are given by the entries on the diagonal, and stability of the multi-bump pulses can be determined by inspecting the signs of the scalar products bj or aj (see again [145,146,150]). We emphasize that the stability matrix A is sometimes truly tridiagonal: for instance, if the underlying PDE features the reflection symmetry x ~ - x , so that the travelling-wave ODE is reversible, and the pulse is symmetric, then the stability matrix A is symmetric with aj -- - b j [146]. Owing to the property (5.14), the signs of the eigenvalues of A can still be determined from the signs of the elements aj -- - b j (see [146, Section 5]). Note that reversibility implies in particular that ]vS[ = v u. We illustrate this approach by an example, namely multi-bump pulses for primary pulses q (~) that approach saddle-focus or bifocus equilibria as [~[ --+ cx~. Hence, we assume that the leading spatial eigenvalues of the matrix O, f ( O , co) are a pair of simple, complexconjugate eigenvalues v,, v,. Under this condition, infinitely many g-pulses bifurcate for each fixed g > 1. More precisely, there is a number L, >> 1 with the following property. For each choice of integers k l . . . . . ke-l E N, there is an integer k, E N such that a unique g-pulse with half-distances L j -- L , + (2k + kj)7c/[ Im v,[ exists, for a unique wave speed close to co, for every integer k > k,. The stability properties of the g-pulse described above are determined by the integers kj chosen above: define k_ - #{j; kj is even},
k+ -- #{j; kj is odd},
so that k_ + k+ + 1 = g, then the g-pulse has a simple critical eigenvalue at )~ = 0, k_ stable and k+ unstable critical eigenvalues, or vice versa (whether k+ equals the number of stable or unstable eigenvalues depends on the definition of L,; see [146] for more details). These statements can be proved upon substituting the expansions (5.13) into (5.15) to get M ( c - co) -- a sin(2Lj I Im v,] + b)e -2Ljl Re v*l (with either j = 0 . . . . . g - 1 or j = 1. . . . . g), upon neglecting terms of higher order. The eigenvalues of the stability matrix A can then be computed as outlined above, and we refer to [ 146, Section 6] for the details of the proof. Instead of giving these details, we focus on a fictitious travelling-wave ODE in R 3 and explore the geometric meaning of
1030
B. Sandstede
(a)
W?o~(O)
(b)
~ , , , , , , ,
I q2
Fig. 11. This plot illustrates the existence equation (5.15) and the stability result for 2-pulses that bifurcate from a primary pulse to a saddle-focus equilibrium in R 3 (see the main text).
the existence Equation (5.15) and the stability results mentioned above for 2-pulses (see Figure 11). Thus, suppose that we have two stable spatial eigenvalues v s ~ v s and one unstable spatial eigenvalue v u with 0 < - Re v s < v u. To see why 2-pulses exist for nearby wave speeds, we consider Figure 11 (a). First, we follow the two-dimensional local stable manifold WlSc(0) backward in ~ to get the manifold W~ar(0), which is again close to the equilibrium at u - 0 . Suppose we seek a 2-pulse with distance 2L between the two pulses: We shall follow the primary pulse, starting at ~ -- -cx~, until we reach q(L). We then vary the wave speed slightly such that the solution takes off and leaves WlSoc(0) to get caught by the manifold W~ar(0) near q(-L) (see Figure 1 l(b)). To examine for which values of L this approach works, we observe that the distance between WlSoc(0) and the lower boundary of W~ar(0) at q(-L) is much smaller than the distance between q(L) and u - 0 because of our assumption that IRe vsl < v u. Thus, one should think of the lower boundary of W~ar (0) at q ( - L ) as being extremely close to WlSoc(0) (this is not shown well in Figure 1 l(a)). For fixed L, we can catch the solution that leaves WlSoc(0) at q(L) using W~ar(0) provided q(L) is directly underneath Wfar(0), s i.e. provided q(L) lies on the dotted line in Figure ll(a). This means precisely that (7f(-L),q(L)) --0 since 7 : ( - L ) is perpendicular to Wfar(0) s at q(-L). Thus, if we have q(L) ql or q(L) = q2 (or if q(L) is any other intersection point of the pulse with the dotted line), then we expect that there is a 2-pulse with distance 2L for a slightly perturbed wave speed (see Figure 11 (b)). Next, we discuss the sign of the critical nonzero eigenvalue of the 2-pulse. By Theorem 5.3, the nonzero eigenvalue of the stability matrix A is given by bl -- ( ~ ( - L ) , q: (L)). Hence, if q(L) = ql, then bl < 0, whereas if q(L) -- q2, then bj > 0. This discussion provides some insight as to the geometric meaning of the entries of the stability matrix A. We refer to Section 5.2.4 for references where the approach outlined here has been used to analyse existence and stability of multi-bump pulses.
Stabili~ of travelling waves
1031
5.2.2. An alternative approach using the Evans function. A different approach to determining the critical PDE eigenvalues of multi-bump pulses is to compute the Evans function De()~) of an ~-pulse and to calculate its ~ zeros near ,k : 0. For 2-pulses, the idea is to calculate the derivative D[ (0)" since there is only one nonzero root of D2(X) near )~ - - 0 , we can determine the sign of this root from the sign of the derivative D~,(0) utilizing a parity argument as in Section 4.2. We refer to [3,4,122,123] for further details. Nii [ 124] used topological indices on projective spaces to compute all roots of the Evans function De()~) for g-pulses that bifurcate from doubly-twisted heteroclinic loops; these multi-bump pulses exist for any ~ > 1. (This stability result has also been obtained in [ 147] using Theorem 5.1 ). The approach using indices appears to be restricted to problems where the critical PDE eigenvalues are real. This makes a restriction to real ,k possible and allows the use of indices. We remark that the function D(~.) that appears in Theorem 5.1 is the Evans function De()~) of the ~-pulse. In many cases, it is more convenient to compute the critical eigenvalues of the stability matrix A directly rather than computing the roots of the determinant det[A - M)~]: the matrix A often exhibits a special structure (such as being superdiagonal or symmetric), which simplifies the computation of its eigenvalues, but this structure may not be visible in the determinant. 5.2.3. Fronts and backs. Up to now, we had looked into the stability of multi-bump pulses that bifurcate from a primary pulse. Frequently, multi-bump pulses can also be constructed by gluing fronts and backs together. In other words, they may bifurcate from heteroclinic loops that consist of connections between two different equilibria p l and p2 (see Figure 12). We need to distinguish between two different scenarios. If the equilibria pl and p2 are such that dim WU(pl) = dim WU(p2), which is the geometric configuration shown in Figure 12(a), then Theorem 5.1 and the results reviewed in Sections 5.2.1 and 5.2.2 readily generalize to cover multi-bump pulses
(a)
pl
(b)
p2
pl
P2
Fig. 12. Two heteroclinic loops comprised of a front qf(~) and a back qb(~)- The plotted manifolds are the stable and unstable manifolds of the respective equilibria.
1032
B. Sandstede
that consist of several alternating copies of the front and the back. We refer to [123,124, 147] for theory and applications. If, on the other hand, the geometry is as shown in Figure 12(b), so that dim WU(pj) = dim WU(p2) + 1
or
dim WU(pl) -- dim WU(p2) - 1,
then the situation is more complicated: since the Morse indices of the equilibria pl and p2 differ, one of them, say P2, has essential spectrum in the right half-plane. Thus, on account of the results in Section 3.4, both the front and the back are unstable. The theory outlined above is then no longer applicable. Nevertheless, it has recently been proved that the multibump pulses that converge to the stable equilibrium pl can be stable even though front and back are both unstable (see [125,154]). The reason for this unexpected behaviour is that the essential spectrum behaves rather strangely under matching or gluing [155]. We also refer to Section 6.3.2 for a related phenomenon. 5.2.4. A review of existence and stability results of multi-bump pulses and applications. Over the past decades, bifurcations to multi-bump pulses, and wave trains, have been the subject of numerous articles. Summaries of relevant results can be found in [28,55]. Here, we focus on those bifurcations for which the stability of the bifurcating multi-bump pulses has been analyzed. In Section 5.2.1, we have already mentioned Shilnikov's saddle-focus and bifocus bifurcation. The existence of multi-bump pulses has been studied in [170,73] (see also [41, 111 ]). The stability of the bifurcating 2-pulses, and certain 3-pulses, has been investigated in [3,4,187]. Stability results for e-pulses with arbitrary g > 1 can be found in [146]. Next, suppose that the travelling-wave ODE is reversible, which is the case when the underlying PDE exhibits the reflection symmetry x w-~ - x , and that the primary pulse q (x) is reflection invariant. If the asymptotic equilibrium u - - 0 towards which the pulse converges is a bifocus, i.e., if it has nonreal simple leading eigenvalues, then again infinitely many e-pulses exist for each g > 1 [25,27,42,82]. The stability of these multi-bump pulses has been analyzed in [ 145]. We refer to the theme issue [174] for applications. There are a number of bifurcations that require two parameters (the wave speed c and an additional system parameter) to be encountered and properly unfolded. Among them are the resonant, the inclination-flip and the orbit-flip bifurcation. All of these bifurcations lead, under appropriate conditions, to multi-bump pulses [ 186,32,86,104,143]. The stability of these pulses is studied in [ 126] utilizing Theorem 5.3. As mentioned in Section 5.2.3, doubly-twisted heteroclinic loops also lead to multibump pulses [39]: their stability has been investigated in [ 124,147]. This bifurcation occurs in the FitzHugh-Nagumo equation [40], and the resulting multi-bump pulses where found to be stable in [ 124,147]. Lastly, we again consider reversible travelling-wave ODEs. Bifurcations of codimension one that lead to multi-bump pulses include the reversible orbit-flip [150] and the semisimple bifurcation [ 188]. The stability of e-pulses that bifurcate at reversible orbit-flips has been analyzed in [ 150], and applications to fourth-order equations and parametricallyforced NLS equations that model optical fibers under phase-sensitive amplification can be found in [ 150] and [97], respectively. The instability of e-pulses to coupled NLS equations that admit a semi-simple bifurcation has been investigated in [189,190].
Stability of travelling waves
1033
5.3. Weak interaction of pulses One interesting feature of the stability matrix A that appears in Theorem 5.3 is that this matrix is tridiagonal. Since the j t h row of the matrix A is associated with the translation eigenfunction Q ' ( . - ~j) of the j th pulse in the multi-bump pulse, located at position ~j E R, it appears as if the individual pulses interact only with their nearest neighbours. This is indeed the case: Suppose that we substitute the initial condition
Uo(~) -- ~ Q(~ - ~j) j=l into the PDE, where Cj 6 ]R denotes the position of the j t h pulse (see Figure 13). We call such a function a pulse packet provided the distances between consecutive pulses are large, i.e., provided ~j+l - ~j ) ) 1 for j = 1 . . . . . ~ -- 1. If we solve the PDE with initial condition U0 (~), then it turns out that the shape of each individual pulse in the pulse packet is maintained; the time-dependence of the solution manifests itself only in the movement of the position of each pulse. In other words, the solution U (~, t) is, to leading order, given by
(5.18) j=l where the positions ~j(t) depend upon the time variable t. Using the above ansatz, it is also possible to derive ODEs that govern the evolution of the positions ~j (t) (see [52,117, 130,51,149]). The ODE that describes the interaction of the pulses in the pulse packet can be written as [149] d
1
dt ~j -- ~ ( ( O ( - L j - l ) , q ( L j _ j ) ) -
{O(Lj), q ( - L j ) ) ) + O(e-3pc),
(5.19)
where
Lo--Le=oc,
~l(t)
Lj =
~j+l --~j 2 ,
~(t)
j - - 1 . . . . . g~- 1,
~(t)
Fig. 13. A pulse packet consisting of three identical, well separated pulses. The positions of the pulses are denoted by the time-dependent coordinates ~1, ~2, ~3.
1034
B. Sandstede
and L = m i n j : j .....e-l{Lj }. The interested reader may wish to compare this equation to the existence Equation (5.15) for multi-bump pulses that was derived in [111,143]: the term c - co in (5.15), which is the wave speed of the j t h pulse in an g-pulse (measured relative to the primary pulse), is replaced by the wave speed Ot~j(t) of the j t h pulse in a wave packet (again relative to the speed of the primary pulse). Hence, once we know that the time evolution of pulse packets is, to leading order, given by (5.18), then the interaction Equation (5.19) can be derived by using Lin's method as outlined in Section 5.1.1. Equation (5.18) can be confirmed by proving the existence of a center manifold for the underlying PDE that is formed by pulse packets. This requires to establish normal hyperbolicity (which is a consequence of the stability results in [ 146]) and to utilize a cut-off function that acts only within a finite-dimensional approximation of the center manifold. We refer to [ 149] for details. Equation (5.19) has been derived rigorously in [51 ] using Liapunov-Schmidt reduction for the PDE and, simultaneously and independently, in [ 149] using a center-manifold reduction and subsequent Liapunov-Schmidt reduction for the flow on the center manifold. In fact, [149] contains an improved version of (5.19) that is applicable near homoclinic bifurcations of codimension two. We also refer to [26,62] for earlier results on the interaction of meta-stable patterns in scalar reaction-diffusion equations. Lastly, we mention that there are interesting relations between the interaction equation (5.19) and the nonlinear dispersion relation c(L) that relates the wave speed c and the wavelength L of the wave trains that accompany the pulse (see, e.g., [ 117,130]).
6. Numerical computation of spectra In many applications, it appears to be impossible, or at least very difficult, to investigate the existence and stability of travelling waves by analytical means. In such a situation, numerical computations are often the only way to obtain information about travelling waves. In this section, we summarize some theoretical results in this direction and provide pointers to algorithms and numerical software for the numerical computation of waves and their PDE spectra.
6.1. Continuation of travelling waves Pulses, fronts, and wave trains can be continued numerically as certain system parameters are varied, once a good starting solution is available for one set of parameter values (see the survey [14]). For pulses, the idea is to approximate the condition for having a pulse, namely that the pulse is contained in the unstable and stable manifolds of the equilibrium at u - - 0 (see [ 14,33,80,107]), i.e., u ( - L ) ~ Wl~c(O),
u(L) 9 WlSoc(0),
1035
Stabili~ of travelling waves
by a condition that is posed on a finite interval [ - L , L] to make it computable. For instance, if q (~) denotes the exact pulse, then a numerical approximation can be sought as a solution to the travelling-wave ODE u' = f (u, c)
(6.1)
on the interval ( - L , L) that satisfies the boundary conditions u
u ( - L ) ~ ToWlUoc(O)- E o ,
s
u(C) e ToWoc(O)- e o
(6.2)
together with the phase condition
f
C(q'(~),u(~) - q(~))d~ = 0 ,
(6.3)
L
which breaks the translation invariance and singles out a specific translate. Here, E~ and E~ denote the generalized stable and unstable eigenspaces of O, f (0, co). We remark that the exact pulse q (~) that appears in the phase condition (6.3) can be replaced by any reasonable guess for q (~). We refer to [ 12,61 ] for algorithms related to the continuation of pulses and fronts. Analogously, periodic waves of period 2L can be sought as solutions to (6.1) and (6.3) together with the boundary condition u(L) = u ( - L ) .
These algorithms can be implemented in boundary-value solvers such as AUTO97 (see [44]). In fact, AUTO97 computes the boundary conditions (6.2) for pulses automatically and also detects various homoclinic bifurcations that lead to multi-bump pulses (see [29, 44]). We refer to the survey [ 14] for more details related to the computation, and continuation, of travelling waves and to [8] as a general reference for numerical methods for boundary-value problems.
6.2. Computation o f spectra o f spatially-periodic wave trains Suppose that Q(~) is a wave train with period L so that Q(~ + L) = Q(~) for all ~. We had seen in Section 3.4.2 that ~, is in the spectrum 27 of the linearization about Q(~) if, and only if, the boundary-value problem d ~u d,~
= A(se; )~)u,
0 < ~ < L,
(6.4)
u(L) = eiyu(O)
has a solution u (~) for some 9/6 R. One possible numerical procedure to find all solutions to (6.4) is as follows.
B. Sandstede
1036
First, compute all solutions to (6.4) for y = 0. This can be done by discretizing the operator L; (or 7-) with periodic boundary conditions using, for instance, finite differences or pseudo-spectral methods [8], and to compute the spectrum of the resulting large matrix using eigenvalue-solvers (see, e.g., [7]). Note that, if we restrict to g = 0, Equation (6.4) describes precisely the eigenvalues of the wave train under periodic boundary conditions u(0) = u(L).
Second, once we have calculated all eigenvalues for y = 0, we can utilize continuation codes (e.g., AUTO97 [44]) to compute the solutions to (6.4) for y :/: 0 by using pathfollowing of the solutions for y = 0 in y. We refer to [159] for an example where this procedure has been carried out successfully. The advantage of this approach is that the spectrum is computed with high accuracy. Also, since the most interesting eigenvalues are those close to the imaginary axis or in the right half-plane, one would need to continue only a few relevant eigenvalues in y. We remark that the approach outlined above gives all eigenvalues only if, for each solution (F,, A,) of (6.4), there is a continuous curve (y, A(V)) of solutions to (6.4), parametrized by Y e [0, y,], such that A, = A(y,). If there is an island of solutions that is not connected to any eigenvalue at y = 0, then this island could never be reached by continuation in F- Fortunately, it is possible to prove that, for reaction-diffusion systems, such islands cannot exist: For bounded islands, this is a consequence of winding-number type arguments using the analyticity of the Evans function Dper(Y, A) in (F,A) (see (3.17)). Unbounded islands can be excluded upon using scaling arguments as in Section 4.2.2.
6.3. Computation of spectra of pulses and fronts We consider the operators 7-(A) -- ~ - A (~; A) and the associated eigenvalue problem d ~u d~
-- A(~; A)u
(6.5)
(see Section 3). Suppose that Q(~) is either a front or a pulse, so that there are n x n matrices A+(A) with IA(se" A ) - A+(A)I ~ Ke -pIll as ~ --+ -+-co for certain positive constants K and p that are independent of ~ and A (see Sections 3.4.3 and 3.4.4). As before, we denote by r = ~V'pt U ~r'es s the various spectra associated with 7-. We are interested in computing the spectrum using periodic boundary conditions (for pulses) or separated boundary conditions (for pulses or fronts). 6.3.1. Periodic boundary conditions. sider the operator
'~Lper(A) " Hpler((--L, L),
C")
Suppose that A+(A) = A_(A) for all A. We con-
> L2((-L,L),Cn),
u,
>
du d~
A(.'A)u,
1037
Stability of travelling waves
where the function space
Hler((-L,L),C n)-H I((-L,L),c n)O {u; u(-L)--u(L)}, yTPer the spectrum of ,*L f per and obencodes periodic boundary conditions. We denote by "-'L _per serve that ~L consists entirely of point spectrum (see, e.g., [155]). The next theorem yTPer converges to s as L -+ oo uniformly in bounded subsets of C. states that ~L
THEOREM 6.1. Assume that Hypothesis 5.3 is met. 9 Fix an eigenvalue )~, with multiplicity ~ in r p t . As L --+ ec, there are precisely g. yTPer , counted with multiplicity, close to )~,, and these elements converge elements in "-'L to )~, as L --+ oc. In other words, isolated eigenvalues o f the pulse are approximated yTPer , counting multiplicity [13,155]. by elements in "-'L 9 Fix )~, ~ Z'ess, then, under an additional technical assumption [155, Hypothesis 6], .--.per )~, is approached by infinitely many eigenvalues in z, L as L --+ ec [155]. 9 Fix a bounded domain I2 C C. For any 6 > O, an L , exists such that ( r per A S2) C Lt~(S) f o r a l l L > L , [155]. See, for instance, [ 191 ] for numerical computations that corroborate this statement. 6.3.2. Separated boundary conditions. Recall that we consider a pulse or a front. Separated boundary conditions can be realized by choosing appropriate subspaces E be and Eb_c of C n . We then consider the operator 7";eP (~.) " Hslep ((-- L, L), C n )
> L2((-L, L), C"),
u,
~
du
dse
A(.'2.)u,
where the function space
Hslep((-L, L), C") -- H' ( ( - L , L), C") N {u" u ( - L ) ~ Eb_c and u(L) ~ E+bc }, encodes separated boundary conditions. HYPOTHESIS 6.1. We assume that the following conditions are met. 9 A number p > 0 and an integer i~c ~ N exist such that, f o r all )~ with Re ~ ~ p, the asymptotic matrices A+()O are hyperbolic, and the dimension o f their generalized unstable eigenspaces is equal to iec. 9 The subspaces E bc satisfy dim E bc -- codim Eb+c -- i oc.
In other words, for separated boundary conditions, the integer ioc is singled out as the number of boundary conditions at the right endpoint of the interval ( - L , L); observe that the number of boundary conditions at ~ - + L is equal to the codimension of E be. The integer i~c is also equal to the asymptotic Morse index of the matrices A+ (i.) as Re i. --+ cx~. yTsep ,fsep .--.sep We denote by ._.c the spectrum of./~ and remark that 2,c consists entirely of point .-.sep spectrum (see, e.g., [ 155]). It turns out that the spectrum ~L does not resemble the spectrum • of T but an, in general, entirely different set that we shall describe next.
1038
B. Sandstede
We label eigenvalues of A+(A) according to their real part, and repeated with their multiplicity, Re v~(A) >~-.. >~ Re vi:-,c + (A) >~ Re vi~+1 + (A) ~>-.->~ Re v,~(A) We can now define the so-called absolute spectrum of 7- [155]. DEFINITION 6.1 (Absolute spectrum). We define + 27abs "-- {A 6 C"' Re vlog + (A) = Re vlOG + 2r- l (- A)-|
.
and, analogously, 27gs = {X 6 C; Re vi-~ (A) = Re vi-+ , (A)}. The absolute spectrum 27abs of 7" is the union of 27a;s and 27~s" Next, suppose that A ~ 27abs, SO that there is a gap, in the real part, between the spatial eigenvalues of A+(A) with indices i ~ and ioc + 1, i.e., so that Re v~ 0v) >~-.->~ Re vi~c + (X) > 7• > Re vioc+l • (A) >/--. >/Re v,~00 for some rl+ --rl+(A) (see Figure 3). We denote by E~(A) and E~(A) the generalized eigenspaces of A+(A) associated with the spectral sets {v~-. . . . . v/~} and {V+i e c + l , ' ' ' , vn+ 'J, respectively. Owing to the presence of the spectral gap at Re v = ~+, Equation (6.5) has exponential dichotomies~ on R + for every )v ~ 27abs with pro~ections P+(~" A) such that N(P_(~" A)) --+ Eu_(A) as ~ -+ - c o and R(P+(~" A)) ---, E~_(A) as ~ --, oc (see Section 3.2). We define the analytic functions Dsep(A) : = N(P_(0; A)) A R(P+(0; A)), +
bc
D~c (X):= E bc A ~7s (A),
"u
Dbc(A ) "-- E+ A E+(X) (see Section 4.1 for this notation) that measure eigenvalues or resonance poles of the underlying wave as well as transversality of the boundary conditions with the pseudo-stable and pseudo-unstable eigenspaces that we introduced above. DEFINITION 6.2 (Pseudo-point spectrum). We define 2 7 p t - { A ~ 27abs" ~ s e p q - ~ - - + - ~ + > 0 }
where s and [• denote the order of A as a zero of the functions Dsep and D+ defined above. We call ~ -- ~sep 2r- ~- -+- ~+ the multiplicity of A for A 6 r p t . The next theorem states that the spectrum yTsep "-'L does not approximate the spectrum 27 -~V'pt U ~V'ess of 7- but the set 27pt U ~V'abs.
Stability of travelling waves
1039
THEOREM 6.2 [155].Assume that Hypotheses 5.3 and 6.1 are met. 9 Fix an eigenvalue A, with multiplicity g~ in rpt. As L --+ cx~, there are precisely g~ .-.sep elements in 2.;L , counted with multiplicity, close to A,, and these elements converge to A, as L --+ r 9 Fix A, E ~V'abs, then, under additional technical assumptions [155, Hypotheses 7 yT,sep and 8], A, is approached by infinitely many eigenvalues in "-'L as L --+ cx~. 9 Fix a bounded domain Y2 C C. For any ~ > O, there is an L , such that ( r L ep O ~Q) C /at3 (~V'pt O ~V'abs)for all L > L , . Hence, eigenvalues on large bounded intervals under separated boundary conditions are created via two different mechanisms: First, eigenvalues are created whenever the spaces that encode the boundary conditions are not transverse to the pseudo-stable or pseudounstable eigenspaces which are related to the two spatial spectral sets associated with the number of boundary conditions. Second, eigenvalues arise as zeros of the Evans function Dsep(A) that is again related to the aforementioned pseudo-stable or pseudo-unstable eigenspaces. We emphasize that the sets rpt and ~V'pt coincide to the right of the essential spectrum tess because of Hypothesis 6.1. The absolute spectrum is typically to the left of the essential spectrum. We remark that, if the underlying PDE is reflection invariant, then rpt and tabs are typically equal to rpt and Z:ess, respectively, except possibly for additional eigenvalues that are created on the bounded interval through nontransverse boundary conditions.
7. Nonlinear stability In this section, we consider nonlinear stability of travelling waves. Suppose that Q(.) denotes a travelling wave that is spectrally stable, so that the spectrum of the linearization s of the PDE about the wave Q (-) is contained in the left half-plane. We are then interested in the stability of the wave Q(.) for the full PDE. Since there is an entire family of waves, namely Q(-) together with its translates Q(-4- r), we say that the wave is nonlinearly stable if, for any initial condition U0(-) sufficiently close to Q(.), the associated solution U (., t) stays near the family {Q(. 4- r); r E •} for all t > 0. More precisely, we have the following definition. DEFINITION 7.1 (Nonlinear stability). We say that a travelling wave Q is nonlinearly stable if, for every e > 0, there is a 3 > 0 with the following property: if U0 is an initial condition in U~(Q), then the associated solution U(., t) satisfies U(., t) E Uc({Q(. + r); ~ E ~}) for t > 0. We say that Q is nonlinearly stable with asymptotic phase if, for each U0 as above, a r, exists such that U (-, t) --+ Q (. + r,) as t --+ cx~. Note that we have not yet mentioned any function spaces or norms. Often, one would have to measure the various neighbourhoods that appear in Definition 7.1 in different, not necessarily equivalent, norms.
B. Sandstede
1040 (b)
T
I
(d)
_.Jl
Fig. 14. The spectrum of the linearization /2 about a spectrally stable wave is shown in (a) if/2 is sectorial, and in (b) if/2 generates a C0-semigroup. In (c) the spectrum of the sectorial linearization about a marginally stable wave is plotted, whereas (d) contains the spectrum if/2 -- j ~ t t (Q) comes from a Hamiltonian PDE (see Section 8).
N o n l i n e a r stability properties d e p e n d strongly on the nature of the PDE, in particular, on the properties of the l i n e a r i z a t i o n / 2 about the travelling wave Q (see F i g u r e 14). T h r o u g h out the r e m a i n d e r of this section, we consider a P D E of the form Ut = A U 4- A/'(U).
(7.1)
We a s s u m e that .,4: X --+ X is a d e n s e l y defined, closed operator, w h e r e A" is an appropriate B a n a c h space.
Sectorial operators.
S u p p o s e that the operator A is sectorial: its r e s o l v e n t set contains the sector {~. 6 C; Re ~. > a - b l Im)~l} for s o m e a 6 IK and s o m e b > 0, and the r e s o l v e n t of A satisfies an estimate of the f o r m K
IX-al for )~ in the above sector. We refer to [85] for m o r e b a c k g r o u n d on sectorial operators as well as for the results m e n t i o n e d below. A s s o c i a t e d with the sectorial o p e r a t o r A are its fractional p o w e r spaces X ~ : we have X ~ = X and ,~1 = ~)(,A), and X ~ with ot 6 (0, 1) interpolates b e t w e e n these two spaces. If, for s o m e oe 6 [0, 1), the nonlinearity A f : X ~ X is differentiable, then we can solve (7.1) in X ~ for any initial condition in X ~ (see [85, Section 1]). S u p p o s e that Q(.), together with its translates Q ( - + ~:), is a travelling-wave solution to a P D E that can be cast in the above fashion. 11 We then have the following result [85, Section 5.1 ] that can be briefly stated as spectral stability implies nonlinear stability with asymptotic phase. M o r e precisely, if the s p e c t r u m Z of the o p e r a t o r / 2 = .,4 -4- OuA/'(Q), p o s e d on X , satisfies Z \ {0} C {)~; Re)~ < - 8 } 11 At this point, there is always some restriction by going from the abstract framework (7.1) to concrete applications to travelling waves where A is differential operator posed on a function space A" such as L2(R, RN).
Stability of travelling waves
1041
for some 8 > 0, and if )~ = 0 is a simple eigenvalue of/2, then the travelling wave Q is nonlinearly stable with asymptotic phase (see Definition 7.1 applied to A'~). We refer to [85, Section 5.1] for the proof that uses a center-manifold reduction (see also [56,160]). The above result is, for instance, applicable to the reaction-diffusion system (2.10) provided the diffusion matrix is strictly positive [85]. Next, we consider the situation where the operator .,4 generates only a C~ on A2 (see, e.g., [133, Section 1] for sufficient and necessary conditions on A). Consequently, the PDE (7.1) has mild solutions in R" for each initial condition in R" provided N': R" ~ ,g is differentiable [ 133, Section 6]. Suppose again that Q(.), together with its translates Q(. + r), is a travelling-wave solution to the PDE (7.1). Assume that the linear semigroup e z;t that is associated with the linearization/2 = .,4 + OuN'(Q) and posed on ,g has a simple eigenvalue X = 1, and the rest of its spectrum is contained inside the circle of radius e -~t for t > 0 for some fixed 8 > 0. Under this assumption, the travelling wave Q is nonlinearly stable with asymptotic phase. We refer to [9] for a proof that uses center-manifold reduction. This nonlinearstability result is applicable to the reaction-diffusion system (2.10) if the diffusion matrix D is non-negative; we refer to [54] and [9] for this and other applications. The main difficulty in applying the above nonlinear-stability result is that the spectrum of the linear semigroup e z;t is not necessarily computable using the spectrum of its generator/2: the spectral theorem is not true for generators of C~ (see, e.g., [133, Section 2.2] for counterexamples). If, however, the generator/2 of a C~ satisfies a resolvent estimate of the form C~
] ( / 2 _ X ) - l ] ~ rl for some fixed 7/6 IR and K, then the semigroup satisfies liez;t I] 0 where
d(o2)- g~(Q~). In fact, a stronger result is true: Qo) is nonlinearly stable if, and only if, the function d(co) is convex (see [78,79]). We refer to [78, Section 3] and [ 115, Section 2] for short proofs of the sufficiency of (8.3), and to [ 108,114-116] for constrained minimization techniques and 12 This statement is, of course, also true if
~o'j(Q~o) is negative
definite.
B. Sandstede
1044 E'(Q)• ~
x+
//~' (Q)
~
I
E' (Q.~)'
/7-/" (Q)/~' (Q)•
O~Q~ ~ R(7/"(Q))
Fig. 15. Various subspaces of R ( H ~ (Qco)) are plotted in the left figure under the assumption that (8.3) is satisfied (the subscript o; is omitted in the plot). The subspaces A'_ and X+ are the unstable and stable eigenspaces of 7-/~(Qco) on which this operator is negative and positive definite, respectively. The center plot illustrates that OcoQcois mapped to KS'(Qw)= 7-t~o(Qco)OwQcounder 7-/"oj(Qco)" this is true since Qco are critical points of 7-/co (the arrows indicate how 7-/~ (QoJ) acts on vectors). As a consequence, it is easily seen that the image of the space /C'(Qoj) • is as shown in the right figure. Thus, (7-t~(Qo~)U, U) > 0 for any U ~/C~(Qco) •
their relation to stability issues. Condition (8.3) decides upon definiteness of the Hessian of 7-/~o restricted to the space/C'(Qo~) • It turns out that, if (8.3) is met, then Q~o is also a constrained minimizer of the original Hamiltonian C. The geometric meaning of the criterion (8.3) in the plane is illustrated in Figure 15. If condition (8.3) is not met, then the wave is not a constrained minimizer; in fact, the linearization s about the wave has unstable eigenvalues (this statement requires an additional analysis for which we refer to [78,79]). In fact, analogous results are true for arbitrary finite-dimensional symmetry groups [79] and for general constrained minimization problems [ 115]; the parameter co is then a finitedimensional vector. As mentioned in Section 4.2.1, the criterion in (8.3) is related to the second-order derivative D"(O)of the Evans function D(Z). This relationship has been explored first in [134,135] and has been put into an abstract framework in [21,22] by exploiting a multi-symplectic formulation of the PDE, using symplectic operators for time and space. We refer also to [20] for a condition similar to (8.3), with co ~ R e, that detects transverse instabilities in Hamiltonian PDEs with two-dimensional spatial variables. Often, the spectrum of 7-/"(Q) is relatively easy to compute. An interesting and important problem is then to infer as much as possible about the spectrum of the operator s = JT-/"(Q). We refer to [76,77] for a very general approach to this problem and to [6, 109,189,190] for applications. Note that the optimal stability result that one can hope for in the context of Hamiltonian systems is nonlinear orbital stability without asymptotic phase. In Hamiltonian PDEs on unbounded domains, it is sometimes possible to obtain asymptotic stability of travelling waves to Hamiltonian system by switching to a different norm that is not equivalent to the original one. This program has been carried out in [135] for the Korteweg-de Vries equation. We remark that the stability of e-pulses in Hamiltonian PDEs is an interesting problem. Spectral stability can again be established using the results in Section 5. Nonlinear stability, however, is often far more complicated and, in general, unsolved. The reason is that, if we switch from the primary pulse to an e-pulse, there are s rather than only one, negative eigenvalues of the operator 7-["(Qe). To compensate for this, we would need to have e independent conserved functionals/Cj with associated parameters coj, and the sta-
Stability of travelling waves
1045
bility of an g-parameter family of solutions Q,o can be concluded provided the g x g matrix with elements (7-['~(Q~o)O~oiQ,o, O~ojQ~o) is negative definite. This program has been carried out in [ 115] for the multi-solitons of the Korteweg-de Vries equation: this is possible since the Korteweg-de Vries equation is integrable and admits infinitely-many independent conserved quantities. We also refer to [ 116] for a survey on constrained minimization and stability in Hamiltonian systems. If the equation has only finitely many independent conserved functionals (or if other conserved quantities are not known), then it is not clear how to proceed to establish nonlinear stability of multi-bump pulses.
Monotone (order-preserving) PDEs. Consider a reaction-diffusion system of the form Ut= DU~ +cU~ + F(U),
C It~, U E R N.
(8.4)
In many applications, e.g., to problems arising in combustion theory, the equation is monotone, i.e., the nonlinearity satisfies
aF~
~(U)
> O,
i--~ j.
Under this assumption (in fact, under weaker conditions), the existence and stability of monotone fronts can often be proved. We refer to the monograph [182] and to [37,141] for theory and applications. In fact, [182] is mainly concerned with results for Equation (8.4) where the spatial variable ~ lives on an unbounded cylinder, i.e., where ~ ~ R x s for some bounded domain I2 C R m.
Singularly perturbed reaction-diffusion systems.
Singularly-perturbed reaction-diffusion
systems of the form 8rUt = 82Uxx -+- f
(u, v),
(8.5)
vt ~- (~21)xx + g(u, v)
often allow for the construction, and the stability analysis, of travelling waves utilizing the equations in the singular limit as e --+ 0. Travelling waves can be constructed near the singular limit using geometric perturbation theory (see [91] for a recent survey)or using asymptotic matching (see [176,112]). The stability of these travelling waves can be investigated using several different methods: One possible approach is rigorous asymptotic matching (see again [112]). A second possibility is to use the Evans function [2]. In many cases, the elephant-trunk lemma [71 ] allows to write the Evans function for the full problem (8.5) as the product of the Evans functions to the slow and fast subsystems of (8.5) in the s = 0-limit. We refer to [15,71, 142] for applications. Sometimes, the slow and fast system interact strongly, so that the Evans function is no longer computable as a product. In this situation, new and interesting phenomena occur, and we refer to [47] and [87] and the literature therein for further details. Using the approach from [47], the stability of spatially-periodic travelling waves that
1046
B. Sandstede
continue singular periodic waves has recently been investigated in [53] for the FitzHughNagumo equation. Lastly, a different approach is the SLEP method introduced in [ 128, 129]. We refer to [127] for an extensive review of the SLEP method. The SLEP method and the approach via the Evans function are related [88].
9. Modulated, rotating, and travelling waves We briefly report on extensions and generalizations of some of the theoretical results reviewed in the earlier sections. Waves in heterogeneous media. Most of the results in this survey are concerned with homogeneous media, so that the underlying PDE has no explicit dependence on the spatial variables. Waves can also occur in heterogeneous media, and we refer to the recent survey [1841. Travelling waves in cylindrical domains. We focused on travelling waves for a onedimensional spatial variable. Often, however, one would be interested in parabolic equations Ut = Uxx + A U + F ( U ) ,
(x, y) E IR x a-d,
on unbounded cylindrical domains with bounded, or unbounded, cross-section X2 C ]t~ m 9 Here, A is the Laplace operator acting on the y-variable. In a moving frame ~ = x - ct, travelling waves become solutions Q(~, y) to the elliptic problem U ~ + A U + cU~ + F ( U ) = O,
(~, y) ~ R x ~ .
The associated linearized eigenvalue-problem is given by U~$ + A U + cU~ + Ou F ( Q ( ~ , y ) ) U - ~.U.
We refer to [67,84,57,182] and the references therein for various existence results. Methods that have been used to establish existence include the Conley index and spatial discretizations, the Leray-Schauder degree, and comparison principles (i.e., the construction of upper and lower solutions). Stability results can be found in [182] and in the comprehensive list of references therein. Note that, using the reformulation
(
o - A + )~ - OuF(Q(~, .))
as a first-order system, most of the methods and techniques reviewed in this article are also applicable to PDEs on cylindrical domains. We refer to [ 113,137,157] for details. This approach is based upon using the spatial variables in the unbounded directions as evolution variables. This concept, often referred to as spatial dynamics, has been introduced
1047
Stability of travelling waves
by Kirchg~issner [ 101 ] to investigate small-amplitude solutions. We refer to [ 118,120] and references therein for many subsequent articles where spatial dynamics has been utilized. Modulated waves. Modulated waves are solutions that are time-periodic in an appropriate moving coordinate frame, i.e., solutions Q(x, t) that, for some wave speed c and a certain temporal period T, satisfy Q(x, t 4- T) = Q(x - cT, t),
t, x E N.
Such waves may arise through Hopf bifurcations (when a pair of isolated complexconjugate eigenvalues crosses the imaginary axis) or essential instabilities (when a part of the essential spectrum crosses the imaginary axis [ 152,153,158]). Another example are travelling waves in modulation equations such as the Ginzburg-Landau equation which often correspond to modulated waves of the PDE that has been reduced to the modulation equation (see, e.g., [169,179] for stability results in this context). Most of the results presented in Sections 3-6 are also applicable to modulated waves, and we refer to [ 157] for details. The key is that exponential dichotomies, the main technical tool that we exploited, can also be constructed for linearizations about modulated waves. As an example, consider again a reaction-diffusion system U t = D U ~ +cU~ + F ( U ) ,
~ ER,
in an appropriate moving frame. The linearization about a modulated wave Q(~, t) with Q(~, t 4- T) = Q(~, t) is given by Ut = D U ~ +cU~ + O u F ( Q ( ~ , t ) ) U .
Note that the coefficients of this equation are T-periodic in t. It turns out that the eigenvalues )~ of the T-map of the linearization can be characterized by exponential dichotomies to the first-order system
(
o D - ' (O, + ot - 8u F ( Q ( ~ , .)))
id _cD-1
)(U)
where ,k = e aT and (U, V) is T-periodic in t for every ~ c R. The above system is of the same form as the equations that we studied in the earlier sections except that, for each fixed ~, (U, V) take values in a certain Hilbert space of T-periodic functions that depend on t instead of in C 2N. We refer to [157] for details. Rotating waves in the plane. Ut = D A U + F ( U ) ,
Consider the reaction-diffusion system U c IRN, x E R 2,
(9.1)
on the plane. A rotating wave is a solution U (x, t) whose time-evolution is a rigid rotation with constant angular velocity c. Expressed in polar coordinates (r, q)), a rotating wave
1048
B. Sandstede
is therefore of the form U (r, ~0, t) -- Q(r, ~p - ct). In a co-rotating coordinate frame, and using polar coordinates (r, ~0), Equation (9.1) is given by Ut = DAr,~oU 4- cUp 4- F ( U ) ,
(9.2)
x E R 2.
A rotating wave with angular speed c is a stationary solution to (9.2). Examples of rotating waves are Archimedean spiral waves that are stationary solutions Q(r, ~o) to (9.2) for an appropriate value of the angular velocity c such that Q(r, ~p) --+ Q ~ ( K r 4- ~p) as r --+ oe for some 2Jr-periodic function Q ~ (Tt). The function Q ~ (Tt) is a stationary wave-train solution to Ut -- DK2U~pT~ 4- cU~ 4- F ( U ) ,
(9.3)
4/E •.
We refer to [121,176] for background on spiral waves and various other waves in two and three space dimensions. We cast (9.2) as a dynamical system in the radius r:
V~
-
- -
U~o~o +-T+
D - l(cU~o4- F ( U ) ) ] ) "
Spiral waves Q(r, ~o) can then be thought of as fronts in the radial variable r that connect the core state Q(0, ~0) at r = 0 with the r-periodic wave train Q ~ ( x r 4-cp) as r --+ oo. We refer to [ 165] where this approach has been introduced to investigate Hopf bifurcations from homogeneous rest states to spiral waves with small amplitude. To investigate the stability of spiral waves, consider the linearization of (9.2) about the spiral wave Q, written again as a first-order system in the radius r: (U,-) Vr
( - -
-- O~f2~
0 D -1 (cOco + OU F ( Q ( r , tp)) - ~.)
_
id ) ( U ) r 1
9
(9.4)
This equation can again be investigated using exponential dichotomies (see [159]). Note that the limit of (9.4) as r --+ oo is related to the linearization of (9.3) about the asymptotic wave train Q ~ . In particular, the essential spectrum of the spiral can be computed using the essential spectrum of the asymptotic wave train Q ~ . For earlier results on the stability of spiral waves, we refer to [81] and to the review [176]. Various bifurcations of spiral waves to more complicated waves have been investigated in the literature, and we refer to [56,58,74,160,161 ] and the references therein for further details.
Acknowledgment I am grateful to Bernold Fiedler, Arnd Scheel and Alice Yew for helpful comments and suggestions on the manuscript.
Stability of travelling waves
1049
References [1] N. Akhmediev and A. Ankiewicz, Solitons: Nonlinear Pulses and Beams, Chapman-Hall, London (1997). [2] J.C. Alexander, R.A. Gardner and C.K.R.T. Jones, A topological invariant arising in the stability analysis of travelling waves, J. Reine Angew. Math. 410 (1990), 167-212. [3] J.C. Alexander and C.K.R.T. Jones, Existence and stability of asymptotically oscillatory, triple pulses, Z. Angew. Math. Phys. 44 (1993), 189-200. [4] J.C. Alexander and C.K.R.T. Jones, Existence and stability of asymptotically oscillatory double pulses, J. Reine Angew. Math. 446 (1994), 49-79. [5] J.C. Alexander and R.L. Sachs, Linear instability of solitary waves of a Boussinesq-type equation: A computer assisted computation, Nonlinear World 2 (1995), 471-507. [6] J.C. Alexander, M. Grillakis, C.K.R.T. Jones and B. Sandstede, Stability of pulses on optical fibers with phase-sensitive amplifiers, Z. Angew. Math. Phys. 48 (1997), 175-192. [7] E. Anderson, Z. Bai, C. Bischof, J. Demmel, J. Dongarra, J. Du Croz, A. Greenbaum, S. Hammarling, A. McKenney, S. Ostrouchov and D. Sorensen, L A P A C K Users' Guide, SIAM, Philadelphia, PA (1995). [8] U.M. Ascher, R.M. Mattheij and R.D. Russell, Numerical Solutions of Boundary Value Problems for Ordinary Differential Equations, Prentice-Hall, Englewood Cliffs (1988). [9] EW. Bates and C.K.R.T. Jones, lnvariant manifolds for semilinear partial differential equations, Dynamics Reported 2 (1989), 1-38. [10] T.B. Benjamin, The stability ofsolitary waves, Proc. Roy. Soc. London A 328 (1972), 153-183. [11] W.-J. Beyn, Global bifurcations and their numerical computation, Continuation and Bifurcations: Numerical Techniques and Applications, D. Roose, A. Spence and B. De Dier, eds, Kluwer, Dordrecht (1990), 169-181. [12] W.-J. Beyn, The numerical computation of connecting orbits in dynamical systems, IMA J. Numer. Anal. 10 (1990), 379-405. [13] W.-J. Beyn and J. Lorenz, Stability of traveling waves: Dichotomies and eigenvalue conditions on finite intervals, Numer. Funct. Anal. Opt. 20 (1999), 201-244. [14] W.-J. Beyn, A.R. Champneys, E. Doedel, W. Govaerts, Y.A. Kuznetsov and B. Sandstede, Numerical continuation and computation of normal forms, Handbook of Dynamical Systems, Vol. 2, B. Fiedler, ed., Elsevier, Amsterdam (2002), 149-219. [15] A. Bose and C.K.R.T. Jones, Stability, of the in-phase travelling wave solution in a pair of coupled nerve fibers, Indiana Univ. Math. J. 44 (1995), 189-220. [ 16] L. Brevdo and T.J. Bridges, Absolute and convective instabilities of spatially periodic flows, Philos. Trans. Roy. Soc. London A 354 (1996), 1027-1064. [17] J. Bricmont and A. Kupiainen, Renormalization group and the Ginzburg-Landau equation, Comm. Math. Phys. 150 (1992), 193-208. [18] J. Bricmont and A. Kupiainen, Stability of moving fronts in the Ginzburg-Landau equation, Comm. Math. Phys. 159 (1994), 287-318. [19] J. Bricmont, A. Kupiainen and G. Lin, Renormalization group and asymptotics of solutions of nonlinear parabolic equations, Comm. Pure Appl. Math. 4"7 (1994), 893-922. [20] T.J. Bridges, Universal geometric condition for the transverse instabili~' of solitary waves, Phys. Rev. Lett. 84 (2000), 2614-2617. [21] T.J. Bridges and G. Derks, Unstable eigenvalues and the linearization about solitary waves and fronts with symmetry, Proc. Roy. Soc. London A 455 (1999), 2427-2469. [22] T.J. Bridges and G. Derks, The symplectic Evans matrix, and the instability of solitary waves and fronts with symmetry, Arch. Rat. Mech. Anal. 156 (2001), 1-87. [23] T.J. Bridges and A. Mielke, A proof of the Benjamin-Feir instabili~', Arch. Rat. Mech. Anal. 133 (1995), 145-198. [24] R.J. Briggs, Electron-Steam Interaction with Plasmas, MIT Press, Cambridge (1964). [25] B. Buffoni, A.R. Champneys and J.F. Toland, Bifurcation and coalescence of a plethora of homoclinic orbits for a Hamiltonian system, J. Dynamics Differential Equations 8 (1996), 221-279. [26] J. Carr and R. Pego, Metastable patterns in solutions ofut -- e2uxx - f(u), Comm. Pure Appl. Math. 42 (1989), 523-576.
1050
B. Sandstede
[27] A.R. Champneys, Subsidiary homoclinic orbits to a saddle-focus for reversible systems, Internat. J. Bifurcation Chaos 4 (1994), 1447-1482. [28] A.R. Champneys and Y.A. Kuznetsov, Numerical detection and continuation of codimension-two homoclinic bifurcations, Internat. J. Bifurcation Chaos 4 (1994), 795-822. [29] A.R. Champneys, Y.A. Kuznetsov and B. Sandstede, A numerical toolbox for homoclinic bifurcation analysis, Internat. J. Bifurcation Chaos 6 (1996), 867-887. [30] H.-C. Chang, E.A. Demekhin and DT Kopelevich, Local stability theory of solitary pulses in an active medium, Phys. D 97 (1996), 353-375. [31] H.-C. Chang, E.A. Demekhin and DT Kopelevich, Generation and suppression of radiation by solitary pulses, SIAM J. Appl. Math. 58 (1998), 1246-1277. [32] S.-N. Chow, B. Deng and B. Fiedler, Homoclinic bifurcation at resonant eigenvalues, J. Dynamics Differential Equations 2 (1990), 177-244. [33] S.-N. Chow and J.K. Hale, Methods of Bifurcation Theory, Springer, New York (1982). [34] E.A. Coddington and N. Levinson, Theory of Ordinary Differential Equations, MacGraw-Hill, New York (1955). [35] P. Collet, J.-P. Eckmann and H. Epstein, Diffusive repair for the Ginzburg-Landau equation, Helv. Phys. Acta 65 (1992), 56-92. [36] W.A. Coppel, Dichotomies in Stability Theory, Lecture Notes in Math., Vol. 629, Springer, Berlin (1978). [37] E.C.M. Crooks, Stability of travelling-wave solutions for reaction-diffusion-convection systems, Topoi. Methods Nonlinear Anal. 16 (2000), 37-63. [38] L. Debnath, Nonlinear Water Waves, Academic Press, Boston (1994). [39] B. Deng, The bifurcations of countable connections from a twisted heteroclinic loop, SIAM J. Math. Anal. 22 (1991), 653-679. [40] B. Deng, The existence of infinitely many travelling front and back waves in the FitzHugh-Nagumo equations, SIAM J. Math. Anal. 22 (1991), 1631-1650. [41] B. Deng, On Shilnikov's homoclinic-saddle-focus theorem, J. Differential Equations 102 (1993), 305-329. [42] R.L. Devaney, Homoclinic orbits in Hamiltonian systems, J. Differential Equations 21 (1976), 431--438. [43] F. Dias and C. Kharif, Nonlinear gravity and capillary-gravity waves, Ann. Rev. Fluid. Mech. 31 (1999), 301-346. [44] E.J. Doedel, A.R. Champneys, T.F. Fairgrieve, Y.A. Kuznetsov, B. Sandstede and X. Wang, AUTO97: Continuation and bifurcation software for ODEs (with HOMCONT), Concordia University, Technical Report (1997). [45] A. Doelman, R.A. Gardner and T.J. Kaper, Stability analysis of singular patterns in the 1D Gray-Scott model: A matched asymptotics approach, Phys. D 122 (1998), 1-36. [46] A. Doelman, R.A. Gardner and T.J. Kaper, A stability index analysis of 1-D patterns of the 1D Gray-Scott model, Mere. Amer. Math. Soc. (to be published). [47] A. Doelman, R.A. Gardner and T.J. Kaper, Large stable pulse solutions in reaction-diffusion equations, Indiana Univ. Math. J. 50 (2001) (in press). [48] U. Ebert and W. van Saarloos, Front propagation into unstable states: Universal algebraic convergence towards uniformly translating pulled fronts, Phys. D 146 (2000), 1-99. [49] J.-P. Eckmann and C.E. Wayne, The nonlinear stability of front solutions for parabolic partial differential equations, Comm. Math. Phys. 161 (1994), 323-334. [50] J.-P. Eckmann, C.E. Wayne and P. Wittwer, Geometric stability analysis f or periodic solutions of the SwiftHohenberg equation, Comm. Math. Phys. 190 (1997), 173-211. [51 ] S.-I. Ei, The motion of weakly interacting pulses in reaction-diffusion systems, J. Dynamics Differential Equations (to be published). [52] C. Elphick, E. Meron and E.A. Spiegel, Patterns of propagating pulses, SIAM J. Appl. Math. 50 (1990), 490-503. [53] E.G. Eszter, An Evans function analysis of the stability of periodic travelling wave solutions of the FitzHugh-Nagumo system, Ph.D. thesis, University of Massachusetts, Amherst (1999). [54] J. Evans, Nerve axon equations (iii): Stabili~ of the nerve impulses, Indiana Univ. Math. J. 22 (1972), 577-594. [55] B. Fiedler, Global pathfollowing of homoclinic orbits in two-parameter flows, Dynamics of Nonlinear Waves in Dissipative Systems: Reduction, Bifurcation and Stability, G. Dangelmayr, B. Fiedler,
Stability of travelling waves
[56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71 ] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83]
1051
K. Kirchg~issner and A. Mielke, eds, Pitman Res. Notes in Math. Ser., Vol. 352, Longman, Harlow (1996), 79-145. B. Fiedler, B. Sandstede, A. Scheel and C. Wulff, Bifurcations from relative equilibria of noncompact group actions: Skew products, meanders, and drifts, Doc. Math. 1 (1996), 479-505. B. Fiedler, A. Scheel and M.I. Vishik, Large patterns of elliptic systems in infinite cylinders, J. Math. Pures Appl. 77 (1998), 879-907. B. Fiedler and D. Turaev, Normal forms, resonances, and meandering tip motions near relative equilibria of Euclidean group actions, Arch. Rat. Mech. Anal. 145 (1998), 129-159. P.C. Fife, Patterns formation in gradient systems, Handbook of Dynamical Systems, Vol. 2, B. Fiedler, ed., Elsevier, Amsterdam (2002), 677-722. S. Focant and T. Gallay, Existence and stability of propagating fronts for an autocatalytic reactiondiffusion system, Phys. D 120 (1998), 346-368. M.J. Friedman and E.J. Doedel, Numerical computation and continuation of invariant manifolds connecting fixed points, SIAM J. Numer. Anal. 28 (1991), 789-808. G. Fusco and J. Hale, Slow-motion manifolds, dormant instability, and singular perturbations, J. Dynamics Differential Equations 1 (1989), 75-94. T. Gallay, Local stability of critical fronts in nonlinear parabolic partial differential equations, Nonlinearity 7 (1994), 741-764. T. Gallay and A. Mielke, Diffusive mixing of stable states in the Ginzburg-Landau equation, Comm. Math. Phys. 199 (1998), 71-97. T. Gallay and G. Raugel, Stability of travelling waves for a damped hyperbolic equation, Z. Angew. Math. Phys. 48 (1997), 451-479. T. Gallay and G. Raugel, Scaling variables and stability of hyperbolic fronts, SIAM J. Math. Anal. 32 (2000), 1-29. R.A. Gardner, Existence of multidimensional travelling wave solutions of an initial-boundary, value problem, J. Differential Equations 61 (1986), 335-379. R.A. Gardner, On the structure of the spectra of periodic travelling waves, J. Math. Pures Appl. 72 (1993), 415-439. R.A. Gardner, Spectral analysis of long wavelength periodic waves and applications, J. Reine Angew. Math. 491 (1997), 149-181. R.A. Gardner and C.K.R.T. Jones, Traveling waves of a perturbed diffusion equation arising in a phase field model, Indiana Univ. Math. J. 39 (1990), 1197-1222. R.A. Gardner and C.K.R.T. Jones, Stability of travelling wave solutions of diffusive predator-prey systems, Trans. Amer. Math. Soc. 327 (1991), 465-524. R.A. Gardner and K. Zumbrun, The gap lemma and geometric criteria for instability of viscous shock profiles, Comm. Pure Appl. Math. 51 (1998), 797-855. E Glendinning, Subsidia~ bifurcations near bifocal homoclinic orbits, Math. Proc. Cambridge Philos. Soc. 105 (1989), 597-605. M. Golubitsky, V. LeBlanc and I. Melbourne, Meandering of the spiral t i p - an alternative approach, J. Nonlinear Sci. 7 (1997), 557-586. M. Golubitsky and D. Schaeffer, Singularities and Groups in Bifurcation Theory. I, Springer, Berlin (1988). M. Grillakis, Linearized instability for nonlinear SchrOdinger and Klein-Gordon equations, Comm. Pure Appl. Math. 41 (1988), 747-774. M. Grillakis, Analysis of the linearization around a critical point of an infinite-dimensional Hamiltonian system, Comm. Pure Appl. Math. 43 (1990), 299-333. M. Grillakis, J. Shatah and W. Strauss, Stability theory of solita~ waves in the presence of symmet o, I, J. Funct. Anal. 74 (1987), 160-197. M. Grillakis, J. Shatah and W. Strauss, Stability theo~ of solita~ waves in the presence of symmetry. H, J. Funct. Anal. 94 (1990), 308-348. J. Guckenheimer and P. Holmes, Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields, Springer, New York (1983). ES. Hagan, Spiral waves in reaction-diffusion equations, SIAM J. Appl. Math. 42 (1982), 762-786. J. Harterich, Cascades ofhomoclinic orbits in reversible dynamical systems, Phys. D 112 (1998), 187-200. P. Hartman, Ordinao' Differential Equations, Birkh~iuser, Boston (1982).
1052
B. Sandstede
[84] S. Heinze, Traveling waves for semilinear parabolic partial differential equations in cylindrical domains, Ph.D. thesis, University of Heidelberg (1989). [85] D. Henry, Geometric Theo~ of Semilinear Parabolic Equations, Lecture Notes in Math., Vol. 804, Springer, New York (1981). [86] A.J. Homburg, H. Kokubu and M. Krupa, The cusp horseshoe and its bifurcations in the unfolding of an inclination-flip homoclinic orbit, Ergodic Theory Dynamical Systems 14 (1994), 667-693. [87] H. Ikeda and T. Ikeda, Bifurcation phenomena from standing pulse solutions in some reaction-diffusion systems, J. Dynamics Differential Equations 12 (2000), 117-167. [88] H. Ikeda, Y. Nishiura and Y. Suzuki, Stability of traveling waves and a relation between the Evans function and the SLEP equation, J. Reine Angew. Math. 475 (1996), 1-37. [89] R.S. Johnson, A Modern Introduction to the Mathematical Theory of Water Waves, Cambridge Univ. Press, Cambridge (1997). [90] C.K.R.T. Jones, Stability of the travelling wave solution of the FitzHugh-Nagumo system, Trans. Amer. Math. Soc. 286 (1984), 431-469. [91] C.K.R.T. Jones, Geometric Singular Perturbation Theory, C.I.M.E. Lectures, Montecatini Terme, Lecture Notes in Math., Vol. 1609, Springer, Heidelberg (1995). [92] C.K.R.T. Jones, R.A. Gardner and T. Kapitula, Stability of travelling waves for nonconvex scalar viscous conservation laws, Comm. Pure Appl. Math. 46 (1993), 505-526. [93] T. Kapitula, On the stability of travelling waves in weighted L ~ spaces, J. Differential Equations 112 (1994), 179-215. [94] T. Kapitula, Stability criterion for bright solitary waves of the perturbed cubic-quintic Schr6dinger equation, Phys. D 116 (1998), 95-120. [95] T. Kapitula, The Evans function and generalized Melnikov integrals, SIAM J. Math. Anal. 30 (1999), 273-297. [96] T. Kapitula and J. Rubin, Existence and stability of standing hole solutions to complex Ginzburg-Landau equations, Nonlinearity 13 (2000), 77-112. [97] T. Kapitula and B. Sandstede, Stability of bright solitary wave solutions to perturbed nonlinear Schr6dinger equations, Phys. D 124 (1998), 58-103. [98] T. Kapitula and B. Sandstede, A novel instability mechanism for bright solitary-wave solutions to the cubic-quintic Ginzburg-Landau equation, J. Opt. Soc. Amer. B 15 (1998), 2757-2762. [99] R. Kapral and K. Showalter (eds), Chemical Waves and Patterns, Kluwer, Dordrecht (1995). [ 100] T. Kato, Perturbation Theory for Linear Operators, Springer, New York (1966). [101] K. Kirchg~issner, Wave-solutions of reversible systems and applications, J. Differential Equations 45 (1982), 113-127. [ 102] K. Kirchg~issner, On the nonlinear dynamics of travelling fronts, J. Differential Equations 96 (1992), 256278. [103] K. Kirchg~issner and G. Raugel, Stability of fronts for a KPP-system: The noncritical case, Dynamics of Nonlinear Waves in Dissipative Systems: Reduction, Bifurcation and Stability, G. Dangelmayr, B. Fiedler, K. Kirchg~issner and A. Mielke, eds, Pitman Res. Notes in Math. Ser., Vol. 352, Longman, Harlow (1996), 147-208. [ 104] M. Kisaka, H. Kokubu and H. Oka, Bifurcations to N-homoclinic orbits and N-periodic orbits in vector fields, J. Dynamics Differential Equations 5 (1993), 305-357. [ 105] M. Krupa, B. Sandstede and P. Szmolyan, Fast and slow waves in the FitzHugh-Nagumo equation, J. Differential Equations 133 (1997), 49-97. [ 106] J. Kutz and W. Kath, Stability ofpulses in nonlinear optical fibers using phase-sensitive amplifiers, SIAM J. Appl. Math. 56 (1996), 611-626. [107] Y.A. Kuznetsov, Elements of Applied Bifurcation Theory, Springer, New York (1995). [108] S.E Levandosky, A stability analysis offifih-order water wave models, Phys. D 125 (1999), 222-240. [ 109] Y.A. Li and K. Promislow, Structural stability of nonground state traveling waves of coupled nonlinear Schr6dinger equations, Phys. D 124 (1998), 137-165. [110] Y.A. Li and K. Promislow, The mechanism of the polarizational mode instability in birefringent fiber optics, SIAM J. Math. Anal. 31 (2000), 1351-1373. [ 111 ] X.-B. Lin, Using Melnikov's method to solve Shilnikov's problems, Proc. Roy. Soc. Edinburgh Sect. A 116 (1990), 295-325.
Stability of travelling waves
1053
[112] X.-B. Lin, Construction and asymptotic stabili~ of structurally stable internal layer solutions, Trans. Amer. Math. Soc. 353 (2001), 2983-3043. [113] G.J. Lord, D. Peterhof, B. Sandstede and A. Scheel, Numerical computation of solitary, waves in infinite cvlindrical domains, SIAM J. Numer. Anal. 37 (2000), 1420-1454. [114] J.H. Maddocks, Restricted quadratic forms and their application to bifurcation and stability in constrained variational principles, SIAM J. Math. Anal. 16 (1985), 47-68; Errata 19 (1988), 1256-1257. [115] J.H. Maddocks and R.L. Sachs, On the stability of KdVmulti-solitons, Comm. Pure Appl. Math. 46 (1993), 867-901. [116] J.H. Maddocks and R.L. Sachs, Constrained variational principles and stabili~ in Hamiltonian systems, Hamiltonian Dynamical Systems, IMA Vol. Math. Anal., Vol. 63, Springer, New York (1995), 231-264. [ 117] E. Meron, Pattern formation in excitable media, Phys. Reports 218 (1992), 1-66. [ 118] A. Mielke, A spatial center manifold approach to steady bifurcations from spatially periodic patterns, Dynamics of Nonlinear Waves in Dissipative Systems: Reduction, Bifurcation and Stability, G. Dangelmayr, B. Fiedler, K. Kirchg~issner and A. Mielke, eds, Pitman Res. Notes in Math. Ser., Vol. 352, Longman, Harlow (1996), 209-262. [119] A. Mielke, Instability and stability of rolls in the Swifi-Hohenberg equation, Comm. Math. Phys. 189 (1997), 829-853. [120] A. Mielke, The Ginzburg-Landau equation in its role as a modulation equation, Handbook of Dynamical Systems, Vol. 2, B. Fiedler, ed., Elsevier, Amsterdam (2002), 759-834. [ 121 ] J. Murray, Mathematical Biology, Springer, Berlin (1989). [122] S. Nii, An extension of the stability index for travelling wave solutions and its application to bifurcations, SIAM J. Math. Anal. 28 (1997), 402-433. [123] S. Nii, Stability of travelling multiple-front (multiple-back) wave solutions of the FitJtugh-Nagumo equations, SIAM J. Math. Anal. 28 (1997), 1094-1112. [ 124] S. Nii, A topological proofofstabilit~' of N-front solutions ofthe FitzHugh-Nagumo equations, J. Dynamics Differential Equations 11 (1999), 515-555. [ 125] S. Nii, Accumulation of eigenvalues in a stabili~' problem, Phys. D 142 (2000), 70-86. [126] S. Nii and B. Sandstede, On the connection between the geometry and stabili~' of multi-bump pulses arising in homoclinic flip bifurcations (in preparation). [127] Y. Nishiura, Coexistence of infinitely many stable solutions to reaction-diffusion systems in the singular limit, Dynamics Reported 3 (1994), 25-103. [128] Y. Nishiura and H. Fujii, Stability of singularly perturbed solutions to systems of reaction-diffusion equations, SIAM J. Math. Anal. 18 (1987), 1726-1770. [129] Y. Nishiura, M. Mimura, H. Ikeda and H. Fujii, Singular limit analysis of stabili~ of traveling wave solutions in bistable reaction-diffusion equations, SIAM J. Appl. Math. 49 (1990), 85-122. [130] M. Or-Guil, I.G. Kevrekidis and M. Bar, Stable bound states ofpulses in an excitable medium, Phys. D 135 (2000), 154-174. [131] K.J. Palmer, Exponential dichotomies and transversal homoclinic points, J. Differential Equations 55 (1984), 225-256. [132] K.J. Palmer, Exponential dichotomies and Fredholm operators, Proc. Amer. Math. Soc. 104 (1988), 149156. [133] A. Pazy, Semigroups of Linear Operators and Applications to Partial Differential Equations, Springer, Berlin (1983). [134] R. Pego and M. Weinstein, Eigenvalues, and instabilities ofsolita~' waves, Philos. Trans. Roy. Soc. London A 340 (1992), 47-94. [135] R. Pego and M. Weinstein, Asymptotic stabili~, of solitary waves, Comm. Math. Phys. 164 (1994), 305349. [136] R. Pego and M. Weinstein, Convective linear stability of solita 9 waves for Boussinesq equations, Stud. Appl. Math. 99 (1997), 311-375. [ 137] D. Peterhof, B. Sandstede and A. Scheel, Exponential dichotomies for solitary-wave solutions of semilinear elliptic equations on infinite cylinders, J. Differential Equations 140 (1997), 266-308. [ 138] J. Prtiss, On the spectrum of CO-semigroups, Trans. Amer. Math. Soc. 284 (1984), 847-857. [139] G. Raugel and K. Kirchg~issner, Stabili~ of fronts for a KPP-system II: The critical case, J. Differential Equations 146 (1998), 399-456.
1054
B. Sandstede
[ 140] S.C. Reddy and L.N. Trefethen, Pseudospectra of the convection-diffusion operator, SIAM J. Appl. Math. 54 (1994), 1634--1649. [141] J.-M. Roquejoffre, D. Terman and V.A. Volpert, Global stability of traveling fronts and convergence towards stacked families of waves in monotone parabolic systems, SIAM J. Math. Anal. 27 (1996), 12611269. [142] J.E. Rubin, Stability, bifurcations, and edge oscillations in standing pulse solutions to an inhomogeneous reaction-diffusion system, Proc. Roy. Soc. Edinburgh Sect. A 129 (1999), 1033-1079. [143] B. Sandstede, Verzweigungstheorie homokliner Verdopplungen, Ph.D. thesis, University of Stuttgart (1993). [144] B. Sandstede, Convergence estimates for the numerical approximation of homoclinic solutions, IMA J. Numer. Anal. 17 (1997), 437-462. [ 145] B. Sandstede, Instability of localized buckling modes in a one-dimensional strut model, Philos. Trans. Roy. Soc. London A 355 (1997), 2083-2097. [146] B. Sandstede, Stability ofmultiple-pulse solutions, Trans. Amer. Math. Soc. 350 (1998), 429-472. [ 147] B. Sandstede, Stability of N-fronts bifurcating from a twisted heteroclinic loop and an application to the FitzHugh-Nagumo equation, SIAM J. Math. Anal. 29 (1998), 183-207. [148] B. Sandstede, Stability of multi-bump pulses in the complex cubic-quintic Ginzburg-Landau equation (in preparation). [149] B. Sandstede, Weak interaction ofpulses (in preparation). [150] B. Sandstede, J.C. Alexander and C.K.R.T. Jones, Existence and stability ofn-pulses on opticalfibers with phase-sensitive amplifiers, Phys. D 106 (1997), 167-206. [ 151] B. Sandstede, T. Kapitula and J. Kutz, Stability analysis of travelling waves in nonlocal equations and an application to modelocked pulses, Preprint. [ 152] B. Sandstede and A. Scheel, Essential instability ofpulses and bifurcations to modulated travelling waves, Proc. Roy. Soc. Edinburgh Sect. A 129 (1999), 1263-1290. [153] B. Sandstede and A. Scheel, Spectral stability of modulated travelling waves bifurcating near essential instabilities, Proc. Roy. Soc. Edinburgh Sect. A 130 (2000), 419-448. [ 154] B. Sandstede and A. Scheel, Gluing unstable fronts and backs together can produce stable pulses, Nonlinearity 13 (2000), 1465-1482. [155] B. Sandstede and A. Scheel, Absolute and convective instabilities of waves on unbounded and large bounded domains, Phys. D 145 (2000), 233-277. [156] B. Sandstede and A. Scheel, On the stability of periodic travelling waves with large spatial period, J. Differential Equations 172 (2001), 134-188. [157] B. Sandstede and A. Scheel, On the structure of spectra of modulated travelling waves, Math. Nachr. (in press). [158] B. Sandstede and A. Scheel, Essential instabilities of fronts: Bifurcation, and bifurcation failure, Dynamical Systems 16 (2001), 1-28. [ 159] B. Sandstede and A. Scheel, Absolute versus convective instability ofspiral waves, Phys. Rev. E 62 (2000), 7708-7714. [160] B. Sandstede, A. Scheel and C. Wulff, Dynamics of spiral waves on unbounded domains using centermanifold reductions, J. Differential Equations 141 (1997), 122-149. [161] B. Sandstede, A. Scheel and C. Wulff, Bifurcations and dynamics of spiral waves, J. Nonlinear Sci. 9 (1999), 439-478. [162] D.H. Sattinger, On the stability of waves of nonlinear parabolic systems, Adv. Math. 22 (1976), 312-355. [ 163] B. Scarpellini, L 2_perturbations ofperiodic equilibria of reaction-diffusion systems, Nonlinear Differential Equations Appl. 1 (1994), 281-311. [ 164] B. Scarpellini, The principle of linearized instability for space-periodic equilibria of Navier-Stokes on an infinite plate, Analysis 15 (1995), 359-391. [165] A. Scheel, Bifurcation to spiral waves in reaction-diffusion systems, SIAM J. Math. Anal. 29 (1998), 1399-1418. [ 166] G. Schneider, Diffusive stability of spatial periodic solutions of the Swifi-Hohenberg equation, Comm. Math. Phys. 178 (1996), 679-702. [167] G. Schneider, Nonlinear stability of Taylor vortices in infinite cylinders, Arch. Rat. Mech. Anal. 144 (1998), 121-200.
Stability o f travelling waves
1055
[168] G. Schneider, Nonlinear diffusive stability of spatially periodic solutions - abstract theorem and higher space dimensions, Proceedings of the International Conference on Asymptotics in Nonlinear Diffusive Systems (Sendai, 1997), Tohoku Math. Publ., Vol. 8 (1998), 159-167. [169] G. Schneider, Existence and stability' of modulating pulse-solutions in a phenomenological model of nonlinear optics, Phys. D 140 (2000), 283-293. [170] L.E Shilnikov, A case of the existence of a countable number of periodic motions, Soviet Math. Dokl. 6 (1965), 163-166. [ 171] J. Smoller, Shock Waves and Reaction-Diffusion Equations, Springer, New York (1994). [172] Theme issue on "Localisation and solitary waves in solid mechanics", Philos. Trans. Roy. Soc. London A 355 (1732) (1997). [173] Theme issue on "Statics and dynamics of localisation phenomena", Nonlinear Dynamics 21 (1) (2000). [ 174] Theme issue on "Time-reversible symmetry, in dynamical systems", Phys. D 112 (1-2) (1998). [175] L.N. Trefethen, Pseudospectra of linear operators, SIAM Rev. 39 (1997), 383-406. [ 176] J.J. Tyson and J.P. Keener, Singular perturbation theo 9 traveling waves in excitable media (a review), Phys. D 32 (1988), 327-361. [177] W. van Saarloos and E Hohenberg, Fronts, pulses, sources, and sinks in the generalized complex GinzburgLandau equation, Phys. D 56 (1992), 303-367. [178] H. Uecker, Diffusive stabilirv of rolls in the re'o-dimensional real and complex Swift-Hohenberg equation, Comm. Partial Differential Equations 24 (1999), 2109-2146. [179] H. Uecker, Stable modulating multi-pulse solutions for dissipative systems with a resonant spatially periodic forcing, J. Nonlinear Sci. 11 (2001), 89-121. [180] A. Vanderbauwhede, Local Bifurcation and Symmet~', Pitman Res. Notes in Math. Ser., Vol. 75, Pitman, Boston (1982). [181] A. Vanderbauwhede and B. Fiedler, Homoclinic period blow-up in reversible and conservative systems, Z. Angew. Math. Phys. 43 (1992), 292-318. [182] A.I. Volpert, V.A. Volpert and V.A. Volpert, Traveling Waves Solutions of Parabolic Systems, Transl. Math. Monographs, Vol. 140, Amer. Math. Soc., Providence, RI (1994). [183] M.I. Weinstein, Modulational stability of ground states of nonlinear Schr6dinger equations, SIAM J. Math. Anal. 16 (1985), 472-491. [184] J. Xin, Front propagation in heterogeneous media, SIAM Rev. 42 (2000), 161-230. [185] E. Yanagida, Stability of fast travelling pulse solutions of the FitzHugh-Nagumo equations, J. Math. Biology 22 (1985), 81-104. [186] E. Yanagida, Branching of double pulse solutions from single pulse solutions in nerve axon equations, J. Differential Equations 66 (1987), 243-262. [ 187] E. Yanagida and K. Maginu, Stability' of double-pulse solutions in nerve axon equations, SIAM J. Appl. Math. 49 (1989), 1158-1173. [188] A.C. Yew, Multipulses of nonlinearly-coupled Schr6dinger equations, J. Differential Equations 173 (2001), 92-137. [ 189] A.C. Yew, Stability analysis of multipulses in nonlinearly-coupled Schr6dinger equations, Indiana Univ. Math. J. 49 (2000), 1079-1124. [190] A.C. Yew, B. Sandstede and C.K.R.T. Jones, Instability of multiple pulses in coupled nonlinear SchrOdinger equations, Phys. Rev. E 61 (2000), 5886-5892. [191] M.G. Zimmermann, S.O. Firle, M.A. Natiello, M. Hildebrand, M. Eiswirth, M. B~ir, A.K. Bangia and I.G. Kevrekidis, Pulse bifurcation and transition to spatiotemporal chaos in an excitable reactiondiffusion model, Phys. D 110 (1997), 92-104. [192] K. Zumbrun and P. Howard, Pointwise semigroup methods and stability of viscous shock waves, Indiana Univ. Math. J. 47 (1999), 741-872.
This Page Intentionally Left Blank
Author Index Roman numbers refer to pages on which the author (or his/her work) is mentioned. Italic numbers refer to reference pages. Numbers between brackets are the reference numbers. No distinction is made between first and co-author(s).
Abarbanel, H. 374, 385 [1] Abbott, L. 13, 16, 22-24, 51, 52 [32]; 53 [65]; 123, 146 [90] Abergel, E 806, 829 [1] Ablowitz, M. 312 [18]; 631,669 [1] Abounouh, M. 909, 972, 974 [1]; 974 [2] Abraham, R. 321,322, 332, 344 [1]; 354, 371,385 [2]; 514, 590 [11 Ackers, C. 41, 51 [ 1] Adams, W. 105, 143 [1] Adelmeyer, M. 770, 832 [71 ] Adler, R. 371,385 [3] Afendikov, A. 764, 779-782, 795, 796, 811, 814, 829 [2]; 829 [31; 829 [4]; 829 [51 Ahlers, G. 338, 344 [5] Akhmediev, N. 985, 990, 1049 [ 1] Alekseev, V. 272, 311 [ 1] Alexander, J. 371, 385 [4]; 989, 1006, 1008, 1009, 1028, 1029, 1031, 1032, 1044, 1045, 1049 [2]; 1049 [3]; 1049 [41; 1049 [51; 1049 [61; 1054 [1501 Alikakos, N. 713-715, 719 [1]; 719 [21; 719 [3]; 719 [41; 719 [51; 719 [61; 851,876 [11; 876 [2] Allgower, E. 151,216 [1]; 379, 385 [5] Amann, H. 840, 842, 848, 851, 876 [31; 876 [41; 876 [5]; 876 [61 Amzica, F. 95, 139, 142, 146 [75]; 146 [76] Andelman, D. 704, 721 [801 Anderson, E. 1036, 1049 [7] Anderson, R 649, 669 [2] Andreucci, D. 735, 755 [1] Angenent, S. 756 [2]; 853,855,857, 858, 862, 876 [7]; 876 [8]; 876 [9]; 876 [101; 876 [lll; 889, 954, 958, 974 [3]; 974 [4] Ankiewicz, A. 985,990, 1049 [ 1] Anosov, D. 315, 318, 332, 344 [2] Aoki, K. 590 [2] Aranson, I. 339-341,344 [3]
Aref, H. 58, 90 [1] Argoul, F. 374, 385 [6] Aris, R. 365,388 [101]; 837, 876 [12] Arneodo, A. 374, 385 [6] Arnold, V. 298-300, 311 [2]; 376, 385 [7]; 514, 526, 590 [3]; 613,616, 661,669 [3]; 669 [4]; 669 [5] Aronson, D. 17, 18, 51 [2]; 365,385 [8] Arrieta, J. 960, 962, 963, 974 [5] Asano, K. 591 [4] Ascher, U. 157, 216 [2]; 217 [3]; 348, 350, 359, 363, 385 [9]; 385 [10]; 1035, 1036, 1049 [8] Aston, R 771,829 [6] Aubry, S. 650, 669 [6] Auerbach, D. 340, 341,344 [4] Aulbach, B. 865, 877 [13] Auslander, J. 887, 974 [6] Avez, A. 613,669 [5] Avrin, J. 591 [5] Babcock, K. 338, 344 [5] Babiano, A. 77, 91 [36] Babin, A. 509, 510, 526, 527, 577, 580, 591 [5]; 591 [6];591 [7];591 [8];591 [9];591 [10];591 [11]; 591 [12]; 591 [13]; 591 [14]; 591 [15]; 591 [16]; 591 [17]; 631,669 [7]; 763,787, 801,802, 805,806, 808, 829 [7]; 829 [8]; 861,864, 877 [14]; 877 [15]; 877 [16]; 889, 913, 915, 917, 918, 925, 939-942, 944, 951,960, 962, 963, 966, 970, 974 [7]; 974 [8]; 974 [9]; 974 [10]; 974 [11]; 974 [12]; 974 [13] Babloyantz, A. 95, 144 [18] Bacalis, N. 640, 675 [179] Bader, G. 386 [40] Baer, S. 103, 143 [2] Bahouri, H. 516, 591 [18] Bai, E 181,217 [4] Bai, Z. 1036, 1049 [7] Baik, J. 668, 669 [8]
1057
1058
A u t h o r Index
Baker, A. 441,458 [1] Bal, T. 95, 139-141,143 [3]; 144 [19]; 144 [41] Balachandar, S. 67, 90 [2] Balasuriya, S. 74, 75, 88, 90 [3]; 92 [44] Ball, J. 889, 891, 897, 899, 904, 909, 960, 961, 974 [141; 975 [151; 975 [161 Bangia, A. 1037, 1055 [ 19 l] Bar, M. 1033, 1034, 1037, 1053 [130]; 1055 [191] Baras, E 740, 741,756 [3] Bardos, C. 544, 550, 587,591 [19]; 591 [20]; 591 [21]; 591 [22]; 591 [23]; 591 [24]; 591 [25]; 925, 942, 950, 969, 970, 975 [17]; 975 [18]; 975 [19] Barrow-Green, J. 303, 311 [4] Bartucelli, M. 798, 803,829 [9]; 829 [10] Basdevant, C. 77, 91 [36] Bashir-Ali, Z. 179, 217 [5] Bates, E 627, 669 [9]; 705,709, 714, 719 [1]; 719 [7]; 719 [8]; 719 [9]; 719 [10]; 871, 877 [17]; 1041, 1049 [9] Beale, J. 517, 591 [26]; 594 [101] Beals, R. 603,611,669 [10]; 669 [11] Bebernes, J. 729, 731, 743, 756 [4]; 756 [5]; 837, 877118]
Bechouche, P. 804, 829 [ 11 ] Beigie, D. 60, 90 [4]; 90 [5] Bekki, N. 774, 795, 829 [12]; 971,980 [170] Beliakova, N. 63, 92 [39] Bellouquid, A. 550, 591 [27] Ben-Artzi, A. 565,577, 591 [29] Benabdallah-Lagha, A. 509, 591 [28] Benci, V. 420, 458 [2]; 458 [3] Benedicks, M. 240, 257, 263 [1]; 371, 385 [11]; 385 [ 12] Benettin, G. 276, 311 [3]; 372, 385 [13]; 385 [14] Benjamin, T. 614, 669 [12]; 716, 719 [ll]; 990, 1049110]
Benson, J. 105, 143 [1] Bercovici, H. 592 [30] Berens, H. 468, 497 [5] Berestycki, H. 859, 860, 877 [19]; 877 [20]; 877 [21] Bergman, K. 667, 672 [113] Bernfeld, S. 851,877 [22] Bernoff, A. 775, 776, 829 [13] Berthoz, A. 95, 138, 143 [9] Bertram, R. 95, 143 [4] Berz, M. 357, 384, 385 [15]; 389 [115] Besnard, D. 509, 592 [31] Besson, G. 876, 877 [23] B6thuel, E 763, 788, 829 [ 14] Beyn, W.-J. 151, 173, 179, 180, 182, 214, 217 [6]; 217 [7]; 217 [8]; 217 [9]; 367, 385 [16]; 385 [17]; 797, 829 [15]; 829 [16]; 1020, 1021, 1025, 1034, 1035, 1037, 1049 [11]; 1049 [12]; 1049 [13]; 1049114]
Bhatia, N. 887, 974 [6]; 975 [20] Bibbig, A. 39, 51 [31 Bikbaev, R. 630, 669 [13] Billotti, J. 888, 906, 975 [21] Birnir, B. 631,669 [14] Bischof, C. 357, 384,385 [15]; 1036, 1049 [7] Bishop, A. 618, 669 [ 15] Blahut, R. 633, 669 [16] Blank, M. 252, 263 [2] Boardman, J. 384, 385 [ 18] Bobenko, A. 630, 669 [17] Boese, F. 479, 496 [1] Bogdanov, R. 378, 385 [ 19] Bohr, T. 638, 646, 674 [172]; 762, 775, 803,830 [17] Bollerman, P. 775,780, 815, 827, 830 [18]; 830 [19] Bonami, A. 704, 719 [12] Borisyuk, R. 166, 217 [ 10] Borsuk, K. 484, 496 [2] Bose, A. 110, 113, 120-125, 128, 138-141, 143 [5]; 146 [84]; 146 [85]; 1009, 1045, 1049 [15] Bott, R. 411,458 [4] Bourgain, J. 605, 630, 640, 667, 669 [18]; 669 [19]; 669 [20]; 669 [21]; 669 [22]; 669 [23]; 669 [24]; 669 [25]; 669 [26]; 669 [27] Bowen, R. 239, 263 [3]; 315, 318, 332, 344 [6]; 354, 371,385 [20]; 385 [21] Bower, A. 62, 63, 91 [6]; 91 [7]; 91 [8] Bower, J. 13, 23, 40,52 [12]; 52 [13] Bowman, C. 718, 721 [66] Bowman, K. 77, 78, 91 [9]; 91 [10]; 91 [11]; 91 [12]; 91 [13] Bowtell, G. 8, 54 [73] Brachet, M. 203,217 [26] Brand, H. 700, 721 [77]; 721 [78] Brandst~iter, A. 374, 385 [22] Brazovskii, S. 701,719 [13] Bressan, A. 725, 731,732, 756 [6]; 756 [7] Bressloff, P. 15, 22, 23, 51 [4]; 51 [5]; 51 [6] Brevdo, L. 1005, 1006, 1049 [ 16] Brezis, H. 573, 592 [32]; 763,788, 829 [14] Bricher, S. 729, 731,756 [4] Bricmont, J. 733, 756 [9]; 786, 792, 830 [20]; 1041, 1042, 1049 [17]; 1049 [18]; 1049 [19] Bridges, T. 789, 826, 830 [21]; 1001, 1005, 1006, 1009, 1011, 1044, 1049 [16]; 1049 [20]; 1049 [21]; 1049 [22]; 1049 [23] Briggs, R. 1000, 1002, 1005, 1006, 1049 [24] Brodzik, M. 379, 385 [23] Broer, H. 268, 311 [5]; 368, 385 [24] Bronsard, L. 714, 719 [2]; 719 [14] Bronski, J. 631, 646, 650, 661, 663, 667, 669 [28]; 670 [29]; 670 [30]; 670 [31]; 670 [32]; 672 [113] Bronstein, I. 871,877 [24] Browder, E 463,484, 487, 494, 496 [3]; 497 [4]
Author Index
Brown, M. 64, 86, 91 [14] Brown, R. 374, 385 [ 1] Brunovsk3), R 749, 755, 756 [10]; 853, 858, 865, 866, 877 [25]; 877 [26]; 877 [27]; 877 [28]; 877 [29]; 896, 937, 951, 955-957, 965, 975 [22]; 975 [23]; 975 [24]; 975 [25]; 975 [26]; 975 [27] Budd, C. 726, 756 [8] Buffoni, B. 1032, 1049 [25] Btiger, M. 791,830 [22] Buhl, E. 5, 34, 53 [62] Bullough, R. 640, 670 [33] Bunimovich, L. 631,669 [7] Burkardt, J. 166, 219 [63] Bush, E 123, 143 [6] Butera, R. 100, 116, 143 [7]; 143 [8] Butte, M. 95, 143 [4] Butzer, P. 468, 497 [5] Buzsfiki, G. 24, 54 [68]; 95, 138, 143 [9] Buzyna, G. 374, 387 [76] Caffarelli, L. 521,592 [33] Caflisch, R. 549, 555, 592 [34]; 592 [35]; 592 [36]; 592 [37] Caginalp, G. 715, 719 [15]; 719 [16] Caglioti, E. 580, 587, 589, 592 [38]; 592 [39] Cahn, J. 708, 709, 719 [17]; 719 [18]; 719 [19] Cai, D. 631,646, 648, 670 [34]; 670 [35] Calabrese, R. 5, 53 [41 ] Calderon, C. 523,592 [40] Callaway, J. 49, 54 [74] Calvin, W. 58, 91 [15] Camassa, R. 60, 91 [16] Campbell, S. 45, 51 [7] Cannell, D. 338, 344 [5] Cannone, M. 523,592 [41] Cao, Y. 495,497 [6] Caponeri, M. 638, 670 [39] Carbinatto, M. 447, 458 [5]; 458 [6] Carleson, L. 371,385 [11] Carr, J. 713, 719 [20]; 1034, 1049 [26] Carslaw, H. 837, 877 [30] Carvalho, A. 960, 962, 963,974 [5] Casartelli, M. 372, 385 [13] Casdagli, M. 385 [25]; 926, 981 [195] Casten, R. 850, 877 [31] Cawley, E. 371,385 [26] Cazenave, T. 605,606, 670 [36]; 972, 975 [28] Cerami, G. 863,877 [32] Cercignani, C. 529, 530, 536, 592 [42]; 592 [43] Ceron, S. 908, 911,968, 975 [29] Chae, D. 569, 592 [44] Chafee, N. 955, 975 [30] Champneys, A. 157, 181, 182, 187-189, 191, 193, 217 [4]; 217 [11]; 217 [12]; 217 [20]; 379, 385 [27];
1059
1020, 1032, 1034-1036, 1049 [14]; 1049 [25]; 1050 [27]; 1050 [28]; 1050 [29]; 1050 [44] Chandler, S. 103, 145 [52] Chang, H.-C. 1006, 1050 [30]; 1050 [31] Chang, Y. 351,386 [32] Chapman, S. 542, 592 [45]; 763,776, 830 [23] Charach, C. 715,716, 719 [21] Chat6, H. 638, 674 [170] Chay, T. 95, 97, 100, 101,143 [10]; 143 [11] Chemin, J. 516, 591 [18] Chen, M. 749, 756 [11]; 857, 858, 877 [33]; 975 [31] Chen, S. 638, 672 [112] Chen, T.-E 858, 877 [34] Chen, X. 705,714, 719 [22]; 719 [23] Chen, X.-Y. 729, 746, 749, 756 [11]; 756 [12]; 756 [13]; 853, 855, 857, 858, 862-865, 877 [33]; 877 [35]; 877 [36]; 877 [37]; 877 [38]; 877 [39]; 877 [40]; 939, 954, 975 [31]; 975 [32]; 975 [33] Chen, Y. 640, 670 [33] Cheng, S. 876, 878 [41] Chepyzhov, V. 889, 915, 975 [34]; 975 [35] Chernoff, P. 891,901,975 [36]; 975 [37] Chiang, C. 38, 54 [67] Chmaj, A. 705, 719 [24] Choe, W. 362, 387 [77] Cholewa, J. 894, 902, 903,911,912, 975 [38] Chorin, A. 509, 556, 592 [47]; 640, 670 [37] Chory, M. 365, 385 [8] Chossat, P. 249, 263 [4]; 558, 592 [46]; 763,778, 779, 830 [24] Chow, C. 20-24, 26-30, 51 [8]; 51 [9]; 51 [ 10]; 54 [71]; 123, 143 [12]; 146 [97]; 638, 646, 670 [38] Chow, S. 355,386 [28]; 386 [29] Chow, S.-N. 315, 318, 320, 343, 344 [7]; 344 [8]; 344 [9]; 344 [10]; 344 [11]; 344 [12]; 344 [13]; 463,484, 495,497 [7]; 497 [8]; 697, 719 [25]; 856, 857, 872, 878 [42]; 878 [43]; 878 [44]; 934, 951, 975 [23]; 975 [39]; 987, 1002, 1020, 1032, 1034, 1050 [32]; 1050 [33] Christen, Y. 95, 138, 143 [9] Christiansen, J. 157, 217 [3]; 219 [67] Christiansen, P. 640, 674 [154]; 674 [155] Chueshov, I. 931,975 [40] Ciliberto, S. 638, 670 [39] Cliffe, K. 212, 219 [74] Cockburn, B. 931,970, 975 [41 ] Coddington, E. 887, 975 [42]; 1025, 1026, 1050 [34] Cohen, A. 95, 143 [13] Cohen, L. 740, 741,756 [3] Coifman, R. 611,669 [10] Coleman, B. 701,702, 719 [26] Collet, P. 700, 702, 719 [27]; 763, 786, 791, 792, 801, 804-806, 815, 830 [25]; 830 [26]; 830 [27];
1060
Author Index
830 [28]; 830 [29]; 830 [301; 970, 976 [431; 1041, 1050 [35] Collins, G. 726, 756 [8] Colonna, J. 579, 593 [69] Conley, C. 224, 232, 263 [5]; 399, 406, 407, 420, 445, 447, 457, 458 [7]; 458 [8]; 458 [9]; 458 [10]; 458 [111; 458 [12]; 458 [131; 458 [14]; 458 [151; 458 [16]; 865,878 [45]; 922, 976 [46] Constantin, P. 510, 565, 570-574, 578, 592 [30]; 592 [48]; 592 [49]; 592 [50]; 592 [51]; 592 [52]; 592 [53]; 592 [54]; 592 [55]; 592 [56]; 593 [57]; 593 [58]; 593 [59]; 798, 803,829 [9]; 925,964, 970, 976 [44]; 976 [45] Contreras, D. 95, 139, 142, 143 [14]; 144 [20]; 146 [75]; 146 [76] Cook, L. 100, 143 [15] Coombes, B. 354, 355, 386 [30]; 386 [31] Coombes, S. 15, 22, 23, 51 [4]; 51 [5]; 51 [6] Cooperman, G. 894, 902, 976 [47] Coppel, W. 993, 1003, 1050 [36] Corliss, G. 351, 355, 357, 384, 385 [15]; 386 [32]; 386 [33]; 386 [34] Coullet, P. 203,217 [13]; 217 [26] Cowan, J. 22, 23, 25, 52 [20]; 123, 144 [25] Cowling, T. 542, 592 [45] Craig, W. 630, 670 [40]; 774, 830 [31] Crandall, M. 696, 697, 720 [28]; 720 [29] Crauel, H. 889, 976 [48] Crawford, C. 700, 720 [30] Crisanti, A. 638, 675 [176] Crook, S. 13, 23, 40, 51 [11]; 52 [12]; 52 [13] Crooks, E. 989, 1045, 1050 [37]
Cross, C. 585,596 [138] Cross, M. 631, 632, 638, 670 [41]; 679, 700, 717, 720 [31]; 720 [321 Crutchfield, J. 387 [63] Cruz Pacheco, G. 625, 670 [42] Cuong, P. 580, 594 [97] Cushman, R. 29 l, 311 [6] Dafermos, C. 512, 593 [60]; 889, 915, 968, 976 [49]; 976 [50] Dahlquist, G. 350, 386 [35] Damodaran, K. 640, 672 [106] Dancer, E. 850, 859-861, 863, 869, 871, 873-875, 878 [46]; 878 [47]; 878 [48]; 878 [49]; 878 [50]; 878151]
Daners, D. 840, 843, 865, 878 [52]; 878 [53] Date, E. 613,670 [43] Davey, A. 762, 775, 776, 779, 780, 830 [32] Dawson, S. 315, 316, 321, 323-325, 332, 335, 338, 344 [14] Dayawansa, W. 316, 329, 332, 333,344 [19] de Boor, C. 157, 217 [14]
de Melo, W. 371, 386 [36]; 870, 881 [151]; 937, 980 [ 179] de Vries, G. 18, 19, 53 [66] Debnath, L. 985, 990, 1050 [38] Debussche, A. 889, 976 [51 ] Decker, W. 775, 776, 830 [33] Degasperis, A. 603,670 [44] Degiovanni, M. 420, 458 [3] Deift, P. 603, 611,612, 630, 651-653, 659, 660, 665, 668, 669 [8]; 669 [11]; 670 [45]; 670 [46]; 670 [47]; 670 [48]; 670 [49]; 670 [50]; 670 [51]; 670 [52]; 670 [53]; 670 [54]; 830 [34] Deimling, K. 848, 878 [54]; 910, 976 [52] Deissler, R. 338, 339, 341,344 [15]; 344 [23] Del Negro, C. 103, 145 [52] del-Castillo-Negrete, D. 63, 91 [17] Dellnitz, M. 226, 228, 232, 234, 243, 244, 249-254, 262, 263 [6]; 263 [7]; 263 [8]; 263 [9]; 263 [10]; 263 [11]; 263 [12]; 263 [13]; 263 [14]; 263 [22]; 368, 386 [37] DeLorey, T. 139, 141,144 [36] DeMasi, A. 593 [61 ] Demay, Y. 764, 771,779, 813, 815, 832 [74] Demekhin, E. 1006, 1050 [30]; 1050 [31] Demmel, J. 1036, 1049 [7] Deng, B. 178, 217 [15]; 1026, 1032, 1050 [32]; 1050 [39]; 1050 [40]; 1050 [41] Deng, K. 737, 756 [14] Denjoy, A. 365,386 [38] Derks, G. 1009, 1011, 1044, 1049 [21 ]; 1049 [22] Desai, R. 711,720 [34] Desch~nes, M. 120, 146 [77] Destexhe, A. 95, 96, 103, 138-143, 143 [14]; 144 [17]; 144 [18]; 144 [19]; 144 [20]; 144 [21]; 144 [22] Deuflhard, P. 155, 217 [16]; 223, 249, 263 [14]; 263 [ 15] Devaney, R. 1032, 1050 [42] Devillard, P. 650, 670 [55] deVries, G. 101,143 [ 16] Dias, E 985, 1050 [43] Dieci, L. 356, 366, 373, 386 [39]; 386 [40]; 386 [41]; 386 [42]; 386 [43]; 386 [44]; 386 [45]; 386 [46] Diekmann, O. 463, 464, 468, 469, 495, 497 [9] Diener, E 356, 361,386 [47] Diener, M. 356, 361,386 [47]; 386 [48] Ding, J. 238, 239, 244, 263 [16]; 263 [17] DiPerna, R. 550, 593 [62]; 593 [63] DiPrima, R. 762, 776, 830 [35]; 834 [140] Dockery, J. 851,878 [55] Doedel, E. 151, 155, 157, 162, 173, 179, 181, 182, 217 [17]; 217 [18]; 217 [19]; 217 [20]; 217 [21]; 217 [22]; 217 [23]; 217 [24]; 217 [25]; 359, 363, 369, 379, 381, 386 [49]; 386 [50]; 386 [51];
Author Index 386 [52]; 386 [53]; 1020, 1034-1036, 1049 [14]; 1050 [44]; 1051 [61]
Doelman, A. 773, 774, 782, 789, 795, 798, 799, 826, 830 [36]; 830 [37]; 830 [38]; 830 [39]; 830 [40]; 830 [41]; 830 [42]; 989, 1009, 1017, 1045, 1050 [45]; 1050 [46]; 1050 [47] Doering, C. 565, 592 [50]; 786, 798, 803, 804, 824, 829 [9]; 830 [43]; 830 [44]; 832 [91] Doerner, R. 79, 91 [ 18] Dold, J. 731,756 [15] Domich, L. 120, 146 [77] Dongarra, J. 1036, 1049 [7] Dormand, J. 237, 263 [ 18] Dorroh, J. 891,976 [53] Douady, A. 571,593 [64]; 925, 976 [54] Drazin, P. 603, 671 [56] Du, Q. 238, 244, 263 [ 16]; 763,776, 831 [45] Du Croz, J. 1036, 1049 [7] Duan, J. 60, 91 [19]; 774, 831 [46] Duff, G. 357, 386 [54] Dugundji, J. 484, 488,497 [10] Dumortier, F. 379, 386 [55]; 386 [56] Easton, R. 420, 458 [9] Eberly, D. 743, 756 [5]; 837, 877 [18] Ebert, U. 1042, 1050 [48] Eckhaus, W. 356, 386 [57]; 716, 720 [33]; 762764, 774, 776, 785, 786, 795, 818, 820, 830 [35]; 830 [38]; 831 [47]; 831 [48]; 831 [49] Eckmann, J.-P. 369, 372, 373,387 [58]; 387 [59]; 609, 631, 638, 671 [59]; 671 [80]; 700, 702, 719 [27]; 763, 765, 786, 787, 790-792, 801, 804, 806, 815, 830 [26]; 830 [27]; 830 [28]; 830 [29]; 830 [30]; 831 [50]; 831 [51]; 831 [52]; 970, 976 [43]; 1041, 1042, 1050 [35]; 1050 [49]; 1050 [50] Eden, A. 509, 565, 570-572, 574-578, 591 [29]; 593 [65]; 593 [66]; 593 [67]; 593 [68]; 925, 926, 970, 976 [55]; 976 [56] Efendiev, M. 763, 801,806, 831 [53]; 831 [54] Egolf, D. 636, 638, 671 [57]; 671 [58]; 674 [159] Ehmanuilov, O. 567, 594 [86] Ei, S.-I. 1033, 1034, 1050 [51] Eidenschink, M. 231,263 [19] Eirola, T. 356, 386 [41 ] Eiswirth, M. 1037, 1055 [ 191 ] Elder, K. 711,720 [34] Elphick, C. 203,217 [26]; 1033, 1050 [52] Engel, A. 38, 53 [50] Engelborghs, K. 497 [ 11]; 498 [37] Enright, W. 382, 388 [95] Epstein, H. 609, 671 [59]; 786, 830 [30]; 970, 976 [43]; 1041, 1050 [35] Epstein, S. 49, 52 [39]
1061
Ercolani, N. 613, 614, 616, 617, 666, 667, 671 [60]; 671 [61]; 671 [62]; 671 [63]; 718, 720 [35]; 721 [66] Ermentrout, B. 5, 6, 8, 9, 13, 16-18, 20, 22-24, 26, 3237, 40, 41, 51 [2]; 51 [11]; 52 [12]; 52 [13]; 52 [14]; 52 [15]; 52 [16]; 52 [17]; 52 [18]; 52 [33]; 52 [34]; 52 [35]; 53 [49]; 53 [65]; 95, 101, 103, 105, 109, 110, 113, 116, 119, 123, 138, 144 [42]; 144 [43]; 145 [59]; 145 [61]; 146 [88]; 146 [90] Erneux, T. 103, 143 [2] Esposito, R. 593 [61] Eszter, E. 989, 1046, 1050 [53] Eubank, S. 385 [25] Evans, J. 1008, 1041, 1050 [54] Eyre, D. 709, 720 [36]; 720 [37] Faddeev, L. 603, 61 l, 671 [64] Fairgrieve, T. 157, 181,217 [20]; 217127]; 1035, 1036, 1050 [44] Falkovich, G. 641,675 [ 197] Fan, H. 976 [57] Farge, M. 579, 593 [69]; 593 [70]; 593 [71]; 594 [102] Faria, T. 868, 878 [56] Farmer, J. 374, 385 [22]; 387 [63] FagangovL E. 864, 865,878 [57] Faulkner, H. 5, 34, 39, 51 [3]; 53 [62] Fauve, S. 679, 720 [38] Fefferman, C. 510, 571,592 [51]; 592 [52] Feigenbaum, M. 365, 379, 387 [60]; 387 [72] Feir, J. 614, 669 [12]; 716, 719 [11] Feireisl, E. 763, 805, 831 [55]; 853, 858, 864-866, 878 [58]; 878 [59]; 878 [60]; 878 [61]; 878 [62]; 878 [63]; 913, 964, 968, 970, 973, 976 [58]; 976 [59]; 976 [60]; 976 [61] Fellen, B. 382, 388 [95] Feller, W. 335, 344 [16] Fenichel, N. 107, 144 [23]; 628, 671 [65]; 671 [66]; 671 [67]; 671 [68]; 871,878 [64] Fenske, C. 463, 484, 497 [12]; 497 [13] Fermanian Kammerer, C. 733, 756 [16] Ferrari, A. 933, 951,970, 976 [62] Fibich, G. 804, 831 [56] Fiedler, B. 155, 187, 217 [16]; 218 [28]; 270, 276, 312 [9]; 431, 458 [17]; 463, 484, 497 [14]; 743, 749, 755, 756 [10]; 756 [17]; 853-855, 857, 858, 868, 875, 876 [11]; 877 [26]; 878 [65]; 878 [66]; 878 [67]; 878 [68]; 878 [69]; 879 [70]; 879 [71]; 956-958, 974 [4]; 975 [24]; 976 [63]; 976 [64]; 976 [65]; 976 [66]; 976 [67]; 976 [68]; 1019, 1021, 1025, 1032, 1041, 1046, 1048, 1050 [32]; 1050 [55]; 1051 [56]; 1051 [57]; 1051 [58]; 1055 [181] Field, M. 381,387 [61 ]; 387 [62] Fife, P. 680, 682, 693, 703, 705, 709, 714-716, 718, 719 [7]; 719 [8]; 719 [16]; 719 [21]; 720 [39];
1062
A u t h o r Index
720 [40]; 720 [411; 720 [421; 720 [431; 720 [44]; 720 [451; 837, 879 [72]; 985, 1051 [59] Fila, M. 743, 745, 756 [18]; 756 [19]; 858, 879 [73] Filippas, S. 725, 727-731, 733, 756 [20]; 756 [21]; 756[22] Firle, S. 1037, 1055 [191]
Fischer, A. 223,263 [ 15] Fischer, E 338, 344 [35] Fitzgibbon, W. 968, 976 [69] Flandoli, E 889, 976 [48] Flaschka, H. 613, 665, 666, 671 [69]; 671 [70]; 671 [71] Flierl, G. 64, 65, 91 [20] Floer, A. 399, 442, 458 [18]; 458 [19]; 458 [20]; 458 [21]; 458 [22]; 458 [23] Focant, S. 989, 1051 [60] Foias, C. 509, 553, 560, 564, 565, 567-578, 591 [29]; 592 [30]; 592 [53]; 592 [54]; 592 [55]; 592 [56]; 593 [57]; 593 [58]; 593 [59]; 593 [65]; 593 [66]; 593 [67]; 593 [68]; 593 [72]; 593 [73]; 593 [74]; 593 [75]; 593 [76]; 593 [77]; 593 [78]; 593 [79]; 593 [80]; 593 [811; 593 [821; 594 [831; 594 [84]; 594 [85]; 924-927, 931, 933, 934, 951, 964, 970, 976 [44]; 976 [45]; 976 [55]; 976 [56]; 976 [70]; 976 [71]; 977 [72]; 977 [73]; 977 [74]; 977 [75] Fokas, A. 603, 671 [72] Fontich, E. 289, 293,311 [7]; 312 [8] Forest, M. 614, 616, 618,640, 661,664-666, 669 [15]; 671 [60]; 671 [61]; 671 [70]; 671 [73]; 671 [74]; 671 [75] Forster, D. 646, 671 [76] Franks, J. 414, 420, 458 [24] Franzosa, R. 426, 428, 447, 458 [25]; 459 [26]; 459 [27]; 459 [28]; 459 [29] Freadrich, K. 78, 91 [26] Freire, E. 179, 214, 219 [64] Freitas, P. 855, 879 [74] Friedman, A. 725, 756 [23]; 840, 843, 879 [75]; 879 [76] Friedman, M. 181, 182, 217 [21]; 217 [22]; 217 [23]; 218 [29]; 1035, 1051 [61] Friesen, W. 119, 144 [24] Frisch, U. 561,594 [88]; 594 [89] Froehling, H. 387 [63] Froyland, G. 239, 250, 251,263 [6]; 263 [20] Fujii, H. 1009, 1046, 1053 [128]; 1053 [129] Fujita, H. 725, 737, 748, 756 [24]; 756 [25] Fuller, A. 160, 218 [30] Fuller, F. 463,484, 497 [15] Furioli, G. 523,594 [87] Fursikov, A. 553,567, 594 [86]; 596 [163]; 596 [164]; 597 [ 165]; 597 [ 166]
Fusco, G. 713-715, 719 [1]; 719 [2]; 719 [3]; 719 [4]; 719 [5]; 719 [6]; 720 [46]; 858, 859, 879 [77]; 879 [78]; 879 [79]; 956, 977 [76]; 1034, 1051 [62] Gahinet, E 356, 388 [111] Galaktionov, V. 725, 726, 731,733, 736, 737, 739, 740, 756 [8]; 756 [26]; 756 [27]; 756 [28]; 756 [29]; 756 [30]; 757 [31]; 757 [32]; 757 [33]; 758 [73]; 858, 879 [80] Galgani, L. 372, 385 [13]; 385 [14] Gallay, T. 765, 787, 789-792, 831 [50]; 831 [51]; 831 [57]; 831 [58]; 831 [59]; 898, 940, 952, 963, 964, 973, 977 [77]; 989, 1042, 1051 [60]; 1051 [63]; 1051 [64]; 1051 [65]; 1051 [66] Gallouet, T. 573, 592 [32] Gardner, C. 609, 611,671 [77]; 671 [78] Gardner, R. 447, 458 [10]; 459 [30]; 789, 826, 830 [39]; 989, 1002, 1006, 1008, 1009, 1014, 1016, 1017, 1021, 1042, 1045, 1046, 1049 [2]; 1050 [45]; 1050 [46]; 1050 [47]; 1051 [67]; 1051 [68]; 1051 [69]; 1051 [70]; 1051 [71]; 1051 [72]; 1052 [92] Garfinkel, A. 103, 145 [52] Garratt, T. 383, 387 [64] Gaspard, P. 216,218 [31] Gatermann, K. 381,387 [65] Gear, C. 348, 387 [66] Gedeon, T. 431,445, 459 [31]; 459 [32]; 459 [33] Gelfand, I. 744, 757 [34] Gelfreich, V. 273, 294, 295, 297, 298, 302, 312 [10]; 312 [11]; 312 [12]; 312 [13]; 312 [14]; 312 [15]; 312 [16] Georg, K. 151,216 [1]; 379, 385 [5] G6rard, P. 512, 554, 594 [90] Gershenfeld, N. 374, 390 [ 149] Gerstein, V. 887, 906, 977 [78] Gerstner, W. 21-25, 52 [19]; 52 [20]; 52 [30]; 123, 144 [25] Ghidaglia, J.-M. 804, 831 [60]; 909, 925, 942, 960, 970, 972, 974, 977 [79]; 977 [80]; 977 [81]; 977 [82]; 977 [83]; 977 [84]; 977 [85] Gibbon, J. 786, 798, 803, 824, 829 [9]; 829 [10]; 830 [43]; 830 [44] Gidas, B. 743, 757 [35]; 859, 860, 879 [81]; 879 [82] Gierer, A. 703, 720 [47] Giga, Y. 725, 726, 730, 757 [36]; 757 [37]; 757 [38] Gill, G. 715, 720 [41]; 720 [42] Ginibre, J. 798, 800, 801,805, 831 [61] Ginzburg, V. 763,776, 831 [62] Giorgilli, A. 276, 311 [3]; 372, 385 [ 13] Gisself~ilt, M. 798, 803,829 [9] Glassey, R. 606, 671 [79] Glendinning, P. 1032, 1051 [73] Glimm, J. 594 [93]
Author Index
Gobbino, M. 895, 899, 900, 977 [86] Goedde, C. 640, 671 [73] Goirand, E. 579, 593 [70] Goldstein, J. 468, 497 [ 16] Goldstein, R. 704, 720 [48] Gollub, J. 338, 344 [27] Golomb, D. 95, 96, 123, 138-142, 144 [26]; 144 [27]; 144 [28]; 144 [29]; 146 [93]; 339-341,344 [3] Golse, E 537, 544, 550, 591 [19]; 591 [20]; 591 [21]; 591 [22]; 594 [91]; 594 [92] Golub, G. 327, 344 [ 17] Golubitsky, M. 249, 263 [4]; 374, 376, 387 [67]; 996, 1048, 1051 [74]; 1051 [75] Goren, G. 631,638, 671 [80] G6rniewicz, L. 451,459 [34]; 459 [35] Goubet, O. 934, 973,974, 977 [87]; 977 [88]; 977 [89]; 977 [90]; 977 [91] Govaerts, W. 151, 163, 169, 193, 218 [32]; 218 [33]; 218 [34]; 374, 382, 384, 387 [68]; 387 [69]; 387 [70]; 1020, 1034, 1035, 1049 [14] Grace, T. 103, 145 [48] Grad, H. 594 [94] Granas, A. 451,459 [34]; 463,484, 487, 497 [17] Grant, C. 709, 714, 720 [49]; 720 [50] Grasseau, G. 374, 385 [6] Gray, C. 5, 52 [21]; 95, 144 [30]; 144 [31] Grebogi, C. 315-318, 320, 321, 323-325, 327, 329, 332, 333, 335, 338, 339, 343, 344 [14]; 344 [17]; 344 [18]; 344 [19]; 344 [21]; 344 [25]; 344 [26]; 344 [33]; 354, 355,371,387 [71]; 388 [88] Greenbaum, A. 1036, 1049 [7] Greene, J. 365,387 [72]; 609, 611,671 [77]; 671 [78] Greenside, H. 636, 638, 671 [57]; 671 [58]; 674 [159] Grenier, E. 667, 671 [81] Griewank, A. 173, 212, 218 [35]; 218 [36]; 351,357, 363, 384, 385 [15]; 387 [73] Grigoriev, R. 638, 671 [82] Grillakis, M. 608, 609, 671 [83]; 671 [84]; 989, 1009, 1043, 1044, 1049 [6]; 1051 [76]; 1051 [77]; 1051 [78]; 1051 [79] Grillner, S. 95, 143 [13] Grischkowsky, D. 661,674 [163] Grosch, C. 90, 92 [46] Grossman, S. 79, 91 [ 18] Guckenheimer, J. 59, 80, 91 [21]; 160, 163, 182, 217 [21]; 218 [34]; 218 [37]; 235, 263 [21]; 357, 358, 362, 367, 368, 370, 372-374, 383, 384, 387 [69]; 387 [74]; 387 [75]; 387 [76]; 387 [77]; 387 [78]; 387 [79]; 387 [80]; 387 [81]; 387 [82]; 387 [83]; 387 [84]; 388 [85]; 388 [103]; 603, 621, 629, 672 [85]; 870, 879 [83]; 987, 1002, 1020, 1034, 1051 [80] Guder, R. 256, 262, 263 [22]; 264 [23] Guillemin, V. 374, 376, 387 [67]
1063
Gunzburger, M. 763,776, 831 [45] Guo, Y. 587, 591 [23] Gutkin, B. 41, 52 [ 18] Gwinn, E. 327, 344 [20] Hagan, R 763, 788, 831 [63]; 1048, 1051 [81] Hairer, E. 312 [17]; 348-350, 388 [86]; 388 [87] Hajek, O. 887, 975 [20] Hale, J. 214, 218 [38]; 430, 459 [36]; 459 [37]; 463, 464, 467-470, 479, 480, 483, 495, 497 [18]; 497 [19]; 497 [20]; 697, 713, 719 [25]; 720 [46]; 749, 756 [11]; 787, 802, 805, 807, 808, 822, 831 [64]; 831 [65]; 839, 842, 853, 857, 858, 863, 865, 868, 873, 877 [33]; 879 [84]; 879 [85]; 879 [86]; 879 [87]; 879 [88]; 879 [89]; 879 [90]; 879 [91]; 887-890, 893-898, 901-904, 906, 908, 911-916, 918-922, 924, 927, 928, 930-934, 936, 937, 939, 940, 942, 944-948, 951-954, 960, 962970, 973, 974 [5]; 975 [31]; 975 [33]; 975 [38]; 976 [57]; 977 [92]; 977 [93]; 977 [94]; 977 [95]; 977 [96]; 977 [97]; 977 [98]; 977 [99]; 977 [100]; 978 [101]; 978 [102]; 978 [103]; 978 [104]; 978 [105]; 978 [106]; 978 [107]; 978 [108]; 978 [109]; 978 [110]; 978 [111]; 978 [112]; 978 [113]; 978 [114]; 978 [115]; 978 [116]; 987, 1002, 1020, 1034, 1050 [33]; 1051 [62] Hall, G. 318, 319, 325,344 [28]; 365,385 [8] Hailer, G. 74, 75, 79, 87, 91 [22]; 91 [23]; 91 [24]; 91 [25]; 92 [38]; 630, 672 [86]; 672 [87]; 672 [88] Hamel, E 809, 831 [66] Hammarling, S. 1036, 1049 [7] Hammel, S. 315, 318, 320, 321, 325, 332, 333, 335, 339, 344 [18]; 344 [21]; 354, 355,388 [88] Han, S. 19, 52 [22] Hanner, O. 484, 497 [21]; 497 [22] Hansel, D. 41, 52 [23]; 638, 672 [89] Haragus-Courcelle, M. 829, 831 [67] Haraux, A. 862, 865-867, 879 [92]; 879 [93]; 889, 915, 952, 960, 961,965, 972, 975 [28]; 978 [117]; 978 [118]; 978 [119]; 978 [120] Harlow, E 509, 592 [31 ] Harterich, J. 1032, 1051 [82] Hartman, P. 319, 344 [22]; 1001, 1009, 1025, 1026, 1051 [831 Harvey, G. 608, 674 [ 152] Hasegawa, A. 608, 672 [90] Hasimoto, H. 774, 831 [68] Hassard, B. 179, 184, 218 [39]; 218 [40] Hasselblatt, B. 372, 388 [99] Hayes, N. 479, 497 [23] Hayot, F. 646, 672 [93] Heinze, S. 1046, 1052 [84] H61ein, E 763, 788, 829 [ 14]
1064
Author Index
Helfrich, K. 87, 88, 91 [33] Henon, M. 354, 371,388 [89] Henrici, P. 348, 388 [91] Henry, D. 708, 720 [51]; 733, 743, 749, 757 [39]; 840, 841, 843, 858, 872, 879 [94]; 879 [95]; 889, 917, 921,927, 942, 950, 951,954, 955, 978 [121]; 978 [122]; 978 [123]; 978 [124]; 986, 989, 1004, 1040, 1041, 1052 [85] Herbst, B. 312 [18]; 631,669 [1] Herman, M. 365,388 [90] H6ron, B. 804, 831 [60]; 970, 977 [83] Herrero, M. 730, 732-735, 755 [ 1]; 756 [26]; 757 [40]; 757 [41]; 757 [42]; 757 [43]; 757 [44]; 757 [45]; 757 [46]; 757 [47] Herz, A. 495,497 [24] Hess, P. 841-843,847, 850-852, 861,876 [ 1]; 876 [2]; 878 [49]; 878 [50]; 879 [96]; 879 [97]; 879 [98]; 879[99]
Hildebrand, M. 1037, 1055 [191] Hilhorst, D. 704, 719 [12] Hilliard, J. 708, 719 [19] Hindmarsh, J. 101,144 [32] Hirsch, M. 365,372, 376, 379, 380, 388 [92]; 388 [93]; 843, 845, 851, 852, 871, 880 [100]; 880 [101]; 880 [1021; 880 [1031 Hlava~ek, V. 175, 219 [66]; 384, 389 [128] Hockett, K. 327, 344 [20] Hocking, L. 733, 757 [48]; 762, 775, 776, 779, 780, 830 [32]; 831 [69] Hodgkin, A. 96, 139, 144 [33] Hofer, H. 399, 459 [38] Hoffmann-Ostenhof, M. 876, 880 [104] Hoffmann-Ostenhof, T. 876, 880 [104] Hohenberg, E 631, 632, 638, 670 [41]; 672 [91]; 674 [170]; 679, 700, 701, 720 [31]; 721 [81]; 774, 795,834 [144]; 990, 1009, 1055 [177] Hohmann, A. 226, 228, 234, 263 [7]; 263 [8]; 368, 386 [37] Holen, M. 590, 595 [132]; 638, 674 [170] Holland, C. 850, 877 [31] Holland, W. 88, 91 [27] Holm, D. 786, 798, 824, 830 [44] Holmes, E 59, 80, 91 [21]; 235, 263 [21]; 327, 344 [20]; 367, 370, 387 [78]; 389 [135]; 603, 621, 629, 672 [85]; 763, 774, 795, 831 [46]; 831 [70]; 833 [103]; 870, 879 [83]; 987, 1002, 1020, 1034, 1051 [801 Holodniok, M. 173,218 [41] Holschneider, M. 579, 593 [69] Homburg, A. 1032, 1052 [86] Hopkins, W. 100, 143 [15] Hoppensteadt, E 6, 52 [24]; 103, 105, 144 [34] Howard, L. 628, 672 [92]
Howard, P. 1041, 1042, 1055 [192] Howison, S. 763,776, 830 [23] Hsiao, C.-F. 103, 145 [52] Hsu, H. 223, 259, 264 [24] Hu, Y. 851,877 [22] Huang, W. 479, 480, 483, 497 [ 18] Hubbard, J. 358, 388 [94] Htibinger, B. 79, 91 [ 18] Huguenard, J. 139, 141,144 [35]; 144 [36] Huisinga, W. 223,263 [15] Hull, T. 382, 388 [95] Humphries, A. 352, 390 [143]; 915, 981 [201] Hunt, E 262, 264 [25] Huntsman, M. 139, 141,144 [36] Hurewicz, W. 924, 978 [125] Hurley, M. 407, 459 [39]; 459 [40]; 865,880 [105] Hutson, V. 447, 459 [53]; 851,878 [55] Huxley, A. 96, 139, 144 [33] Hwa, T. 638, 646, 670 [38] Ikeda, H. 1009, 1045, 1046, 1052 [87]; 1052 [88]; 1053 [129] Ikeda, T. 1045, 1052 [87] Illner, R. 529, 530, 536, 592 [43]; 594 [95] Ilyashenko, Y. 367, 388 [96] Imai, K. 534, 596 [141] Indik, R. 718, 720 [35]; 721 [66] Infante, E. 955, 975 [30] Ingersoll, A. 580, 594 [96]; 594 [97] Iooss, G. 203, 217 [26]; 558, 592 [46]; 763, 764, 770, 771, 774, 778, 779, 811, 813-815, 830 [24]; 831 [49]; 832 [71]; 832 [72]; 832 [73]; 832 [74]; 872, 883 [2051 Its, A. 651,653,660, 670 [45] Iwasaki, N. 968, 978 [ 126] Izhikevich, E. 6, 7, 41, 45, 52 [24]; 52 [25]; 52 [26]; 52 [27]; 95, 96, 103, 105,144 [34]; 144 [37] Jacklet, J. 95, 144 [38] Jaeger, J. 837, 877 [30] Jayaprakash, C. 45, 51 [7]; 638, 646, 672 [93]; 674 [ 172] Jeffreys, J. 5, 23, 27, 32, 34, 53 [62]; 53 [63]; 53 [64]; 54 [72]; 95, 120, 144 [39]; 146 [98] Jendoubi, M. 866, 867, 879 [92]; 880 [106]; 965, 978 [ 120] Jensen, M. 638, 646, 674 [172]; 762, 775,803,830 [17] Jepson, A. 157, 212, 217 [27]; 219 [74] ....... : i--~ ~"": ~7.;] Jessell, T. 95, 144 [40] Jiang, J.-E 851,880 [107]; 880 [108] Jin, S. 665-667, 671 [62]; 672 [94]; 672 [95] Johansson, K. 668, 669 [8]
Author Index
John, E 664, 672 [96] Johnson, M. 368, 388 [97] Johnson, R. 603,671 [56]; 985,990, 1052 [89] Johnson, S. 372, 387 [79] Jolly, M. 368, 388 [97]; 858, 880 [109]; 955,978 [127] Jones, C. 64, 67, 68, 70-72, 74, 75, 87-89, 90 [3]; 91 [32]; 91 [33]; 92 [41]; 92 [44]; 628, 672 [97]; 789, 826, 830 [39]; 989, 1006, 1008, 1009, 1028, 1029, 1031, 1032, 1041, 1042, 1044, 1045, 1049 [2]; 1049 [3]; 1049 [4]; 1049 [6]; 1049 [9]; 1049 [15]; 1051 [70]; 1051 [71]; 1052 [90]; 1052 [91]; 1052 [92]; 1054 [150]; 1055 [190] Jones, D. 565, 594 [98]; 931,970, 975 [41]; 978 [128] Jones, E. 95, 120, 138, 146 [78]; 146 [79] Jones, G. 489, 497 [25] Jones, S. 38, 39, 52 [28]; 53 [48] Jorba, A. 388 [98] Joseph, D. 744, 757 [49] Joyce, G. 584, 594 [99] Juedes, D. 351,363, 387 [73] Junge, O. 232, 234, 237, 243, 244, 249, 252-256, 262, 263 [9]; 263 [10]; 263 [11]; 263 [12]; 263 [14]; 264 [26]; 264 [27] JUngel, A. 804, 829 [11] Kaashock, M. 469, 497 [26] Kaczyfiski, T. 455,459 [41 ]; 459 [42] Kalyakin, L. 774, 832 [77] Kamvissis, S. 663,667, 674 [150] Kan, I. 371,385 [4] Kandel, E. 95, 144 [40] Kaneko, K. 338, 341,344 [23]; 344 [36] Kaniel, S. 522, 594 [100] Kaper, T. 38, 39, 52 [28]; 60, 91 [28]; 91 [29]; 989, 1009, 1017, 1045, 1050 [45]; 1050 [46]; 1050 [47] Kapitanski, L. 964, 978 [129] Kapitula, T. 763, 774, 786, 795-797, 832 [78]; 832 [79]; 832 [80]; 832 [81]; 832 [82]; 990, 1009, 1010, 1014, 1016, 1017, 1032, 1041, 1042, 1052 [92]; 1052 [93]; 1052 [94]; 1052 [95]; 1052 [96]; 1052 [97]; 1052 [98]; 1054 [151] Kaplan, J. 495,496, 497 [27]; 497 [28]; 497 [29] Kaplan, S. 725, 757 [50] Kappeler, T. 613, 672 [98]; 672 [99] Kapral, R. 338, 344 [36]; 985, 990, 1052 [99] Karbowski, J. 34, 52 [29] Kardar, M. 646, 672 [100] Kast, A. 640, 670 [37] Kath, W. 989, 101 O, 1052 [ 106] Kato, T. 469, 497 [30]; 517, 522, 591 [26]; 594 [101]; 594 [104]; 865,880 [110]; 1007, 1016, 1052 [100] Katok, A. 372, 388 [99] Kawasaki, K. 704, 721 [72] Kawohl, B. 860, 880 [ 111 ]
1065
Kazarinoff, N. 184, 218 [40] Keener, J. 608, 672 [101]; 989, 990, 1009, 1045, 1048, 10551176]
Keizer, J. 95, 100, 143 [10] Keller, G. 238, 252, 263 [2]; 264 [28] Keller, H. 151, 154, 155, 157, 162-165, 173, 217 [24]; 217 [25]; 218 [42]; 218 [43]; 218 [44]; 223, 264 [29]; 363,386 [52]; 386 [53] Keller, J. 639, 672 [102]; 681, 682, 689, 721 [69]; 721 [70] Kenyon, R. 371,388 [ 100] Kern6vez, J.-E 151, 155, 157, 162, 173, 179, 182, 217 [ 19]; 217 [24]; 217 [25]; 363,386 [52]; 386 [53] Kevlahan, N. 579, 593 [71]; 594 [102] Kevrekidis, I. 365, 368, 388 [97]; 388 [101]; 1033, 1034, 1037, 1053 [130]; 1055 [191] Kharif, C. 985, 1050 [43] Khesin, B. 514, 526, 590 [3] Khibnik, A. 163, 169, 187, 193, 218 [34]; 218 [45]; 218 [46]; 360, 384, 387 [69]; 388 [102] Kiemel, T. 95, 143 [4] Kiessling, M. 587, 589, 594 [105] Kifer, Y. 239, 241,244, 264 [30] Kim, S.-H. 370, 388 [103] Kim, U. 95, 144 [41] Kinoshita, S. 488, 497 [31] Kirane, M. 952, 978 [ 119] Kirchgfissner, K. 763, 764, 778, 811, 832 [83]; 832 [84]; 832 [85]; 832 [86]; 833 [104]; 1042, 1047, 1052 [101]; 1052 [102]; 1052 [103]; 1053 [139] Kirrmann, P. 764, 774, 815,832 [87] Kirwan, A.D., Jr. 90, 92 [46] Kisaka, M. 1032, 1052 [104] Kistler, W. 24, 52 [30] Klainerman, S. 509, 594 [106] Klein, R. 640, 672 [103]; 672 [104]; 672 [105]; 672 [106]; 672 [107] Kleinkauf, J. 385 [16] Klef~, W. 367, 385 [ 17]; 797, 829 [ 15] Knapp, B. 650, 672 [ 108] Kodak, H. 354, 355,386 [30]; 386 [31] Koch, H. 858, 880 [ 112] Koch Medina, E 840, 843,878 [52] Kodama, Y. 608, 661,672 [90]; 672 [109] Kohn, R. 521,592 [33]; 714, 719 [14]; 725-730, 733, 756 [20]; 757 [36]; 757 [37]; 757 [38] Kokubu, H. 431,436, 445,459 [32]; 459 [43]; 459 [44]; 1032, 1052 [86]; 1052 [104] Kolmogorov, A. 594 [ 107] K6nig, E 38, 53 [50]; 54 [67] Kopanski~, A. 871,877 [24] Kopelevich, D. 1006, 1050 [30]; 1050 [31] Kopell, N. 6, 8, 9, 17, 18, 20, 23, 24, 26-30, 3239, 41, 45-49, 51, 51 [1]; 51 [2]; 51 [9]; 51 [10];
1066
A u t h o r Index
[14]; 52 [15]; 52 [16]; 52 [17]; 52 [28]; 52 [29]; [31]; 52 [32]; 52 [33]; 52 [34]; 52 [35]; 52 [36]; [38]; 52 [39]; 53 [42]; 53 [44]; 53 [47]; 53 [48]; [56]; 53 [58]; 53 [59]; 54 [71]; 95, 105, 109, ll0, 113, 116, 119-125, 128, 138-141,143 [5]; 144 [42]; 144 [43]; 144 [44]; 145 [45]; 145 [49]; 145 [68]; 146 [71]; 146 [72]; 146 [73]; 146 [84]; 146 [85]; 146 [97]; 628, 672 [92]; 672 [110] Kostelich, E. 316, 329, 332, 333, 344 [19]; 368, 389 [ 114] Kostin, I. 575, 594 [108]; 915, 940, 944, 966, 967, 979 [130]; 979 [131] Kova6i6, G. 60, 91 [29]; 628, 672 [111 ] Kowalczyk, M. 680, 682, 693, 713, 718, 719 [6]; 52 52 52 53
218 [48]; 218 [49]; 218 [50]; 218 [51]; 218 [52]; 360, 379, 385 [27]; 388 [102]; 388 [106]; 987, 1002, 1020, 1032, 1034-1036, 1049 [14]; 1050 [28]; 1050 [29]; 1050 [44]; 1052 [107] Kwapisz, J. 447, 458 [5]
Lacey, A. 740, 741, 745, 747, 748, 755, 757 [51]; 757 [52]; 757 [53]; 757 [54] Ladyzhenskaya, O. 570, 575, 595 [111]; 595 [112]; 595 [113]; 595 [114]; 595 [115]; 748, 757 [55]; 887-889, 897, 904, 912, 924, 925, 931, 963, 970, 979 [133]; 979 [134]; 979 [135]; 979 [136]; 979 [137]; 979 [138]; 979 [139]; 979 [140] Lai, Y. 327, 343, 344 [17]; 344 [25]; 344 [26] 7201431 Laing, C. 771,829 [6] Kozlov, V. 298-300, 311 [2] Lamb, G. 603,673 [ 120] Kozono, H. 523,594 [103] Kraichnan, R. 561, 562, 594 [109]; 595 [110]; 638, Landau, L. 511,538, 595 [116]; 763,776, 831 [62] Landauer, B. 522, 527, 551,595 [117] 6721112] Lanford, O. 357, 366, 388 [108]; 388 [109]; 388 [110]; Krasnoselskii, M. 848, 880 [113]; 887, 906, 977 [78] 529, 595 [ 118] Krauskopf, B. 368, 388 [104] Larsson, S. 315, 318, 320, 344 [32] Krein, M. 880 [114] Kreuzer, E. 223, 256, 262, 263 [22]; 264 [23]; 264 [31] LaSalle, J. 887, 888, 891,896, 903,904, 906, 975 [21]; 977 [100]; 979 [141] Kriecherbauer, T. 668, 670 [46]; 670 [47] Lasota, A. 240, 242, 245,264 [32]; 264 [33] Krisztin, T. 497 [32]; 497 [33] Laub, A. 356, 388 [111 ] Krug, J. 638, 646, 674 [172] Laurenqot, Ph. 972, 973, 979 [142] Krupa, M. 989, 1032, 1052 [86]; 1052 [105] Kruskal, M. 609, 611, 631, 671 [77]; 671 [78]; Lauterbach, R. 381,387 [65] Lavrentiev, M.M. 851,865,883 [213] 674 [ 166]; 674 [ 167] Lax, P. 609, 610, 664, 665,667, 673 [121]; 673 [122]; Krylov, D. 667, 672 [113] 673 [123]; 673 [124]; 673 [125]; 673 [126] Kuang, Y. 494, 497 [34] Lazutkin, V. 273, 293, 295, 297, 302, 312 [14]; Kubi6ek, M. 151,173,218 [41]" 218 [47] 312 [15]; 312 [19]; 312 [20] Kubo, R. 646, 675 [ 182] Kuksin, S. 630, 667, 669 [13]; 669 [17]; 672 [114]; Le Dung 576-578, 595 [119] 672 [115]; 673 [116]; 673 [117]; 673 [118]; Le Roux, G. 312 [18] Lebeau, G. 969, 975 [ 17] 6731119] LeBlanc, V. 1048, 1051 [74] Kunin, B. 182, 217 [22] Lebowitz, J. 593 [61]; 640, 673 [127]; 673 [128] Kunkel, P. 155, 217 [16] Lecar, H. 17, 42, 53 [46]; 122, 145 [51] Kupferman, R. 640, 670 [37] Kupiainen, A. 733, 756 [9]; 786, 792, 830 [20]; 1041, Lee, E. 95, 100, 106, 107, 113, 117, 124, 145 [46]; 146 [86] 1042, 1049 [17]; 1049 [18]; 1049 [19] Lee, J. 664-666, 671 [74] Kupka, I. 388 [105] Lee, Y. 105, 145 [60] Kuramoto, Y. 19, 52 [22]; 52 [37]; 338, 344 [24] Lega, J. 700, 720 [52]; 720 [53]; 721 [63]; 762, Kuratowski, K. 917, 979 [132] 833 [ 110] Kurdyumov, S. 736, 756 [27]; 758 [73] Lehoucq, R. 262, 264 [34] Kurrer, C. 19, 52 [22] Leibovich, S. 527, 595 [131] Kurths, J. 343, 344 [26] Kutz, J. 667,672 [113]; 763,795,833 [103]; 989, 1010, Leizarowitz, A. 701,702, 720 [54] Lemarri6, G. 523, 594 [87] 1052 [106]; 1054 [151] LeMasson, G. 95, 144 [44] Kuznetsov, E. 774, 834 [148] L6meray, E. 476, 497 [35] Kuznetsov, V. 380, 388 [ 107] Kuznetsov, Y. 151, 157, 162, 165, 166, 169, 179, Leng, L. 667, 672 [113] 181, 182, 184, 187-189, 191, 193, 203, 204, 209, Leonard, A. 60, 90 [4]; 90 [5]; 92 [42] 215, 216, 217 [11]; 217 [12]; 217 [20]; 218 [46]; Leray, J. 595 [120]; 595 [121]; 595 [122]
Author Index
Levandosky, S. 1043, 1052 [108] Levermore, D. 544, 550, 591 [19]; 591 [20]; 591 [21]; 591 [22]; 591 [24]; 625, 630, 665-667, 670 [42]; 670 [48]; 671 [62]; 672 [94]; 672 [95]; 673 [123]; 673 [ 124]; 673 [ 125]; 673 [ 126]; 798-800, 830 [34]; 830 [43]; 832 [88]; 832 [89] Levin, J. 946, 979 [143] Levine, H. 737, 756 [14]; 757 [56]; 858, 877 [34]; 880 [ 115] Levinger, B. 469, 498 [36] Levinson, N. 887, 975 [42]; 979 [144]; 1025, 1026, 1050134]
Levitin, V. 157, 162, 166, 169, 187, 193, 218 [46]; 218 [52]; 360, 380, 388 [102]; 388 [107] Levy, D. 804, 831 [56] Li, C. 859, 880 [ 116] Li, L. 668, 670 [49] Li, T.-Y. 238, 244, 263 [16]; 264 [35] Li, Y. 612-614, 617, 618, 621, 627, 629, 630, 673 [129]; 673 [130]; 673 [131]; 673 [132]; 6731133]
Li, Y.A. 1017, 1044, 1052 [109]; 1052 [110] Lichtenstein, L. 514, 595 [123] Lichtman, E. 608, 674 [ 152] Lieb, E. 573, 595 [124] Lifshitz, E. 511,538, 595 [116] Lin, E 521,595 [125] Lin, F.-H. 788, 789, 832 [90] Lin, G. 1042, 1049 [19] Lin, X. 355,386 [28] Lin, X.-B. 343, 344 [7]; 915, 918, 978 [101]; 1009, 1021-1023, 1025, 1028, 1032, 1034, 1045, 1052 [lll]; 1053 [1121 Lions, J.-L. 595 [126] Lions, E-L. 550, 580, 587, 589, 592 [38]; 592 [39]; 593 [63]; 595 [127]; 640, 673 [134]; 848, 880 [117] Lipphardt, B. 90, 92 [46] Liu, J. 338,344 [27] Liu, L. 179, 218 [53]; 218 [54] Liu, V. 570, 595 [129] Liu, W. 729, 73 l, 756 [21]; 757 [57] Liu, Y. 179, 218 [54] Llinfis, R. 95, 103, 120, 138, 143 [9]; 145 [47]; 145 [48]; 146 [79] LoFaro, T. 45, 48, 52 [38]; 116, 145 [49] Logak, E. 704, 719 [12]; 720 [55] L6hner, R. 389 [ 112] Lojasiewicz, S. 938, 979 [145] Lopes, O. 860, 880 [118]; 880 [119]; 906, 908, 91 l, 946, 964, 968, 975 [29]; 978 [102]; 979 [146] Lord, G. 1046, 1053 [113] Lorenz, E. 355, 358, 366, 389 [113]; 558, 595 [128] Lorenz, J. 366, 386 [42]; 386 [44]; 386 [45]; 797, 829 [16]; 1037, 1049 [13]
1067
Lou, Z. 368, 389 [ 114] Lozier, M. 62, 63, 91 [7]; 92 [39] Lu, K. 627, 669 [9]; 856-858, 871, 872, 877 [17]; 878 [42]; 878 [43]; 878 [44]; 880 [120]; 880 [121]; 934, 975 [39] Lubich, C. 312 [ 17] Luce, B. 625,670 [42]; 803, 804, 832 [91] Lucheroni, C. 640, 673 [138] Lunardi, A. 840-843, 880 [122] Lundgren, T. 744, 757 [49] Lunkeit, E 78, 91 [26] Lust, K. 498 [37] Luzyanina, T. 498 [37] Lvov, V. 641,675 [197] Lynden-Bell, D. 585,595 [130] MacEvoy, W. 667, 671 [62] MacKay, R. 60, 91 [30]; 365, 370, 387 [72]; 388 [103] Mackey, M. 242, 245,264 [32] Maddocks, J. 1043-1045, 1053 [114]; 1053 [115]; 1053 [ 116] Magalhfies, L. 430, 459 [37]; 868, 878 [56]; 887, 897, 920-922, 924, 978 [ 103] Maginu, K. 1009, 1032, 1055 [ 187] Magnus, W. 612, 673 [135] Mahaffy, J. 479, 480, 498 [38] Mahalov, A. 510, 526, 527, 577, 580, 591 [5]; 591 [6]; 591 [7]; 591 [8]; 591 [9]; 591 [10]; 591 [11]; 591 [12]; 591 [13]; 595 [131] Maier-Paape, S. 710, 711,720 [56]; 720 [57]; 795,796, 832 [811 Majda, A. 509, 517,590, 591 [26]; 592 [52]; 594 [101]; 594 [106]; 595 [132]; 640, 641,643,645, 672 [103]; 672 [104]; 672 [105]; 672 [106]; 672 [107]; 673 [134]; 673 [136] Makarov, M. 613,672 [98] Makino, K. 357, 389 [ 115] Malanotte-Rizzoli, P. 64, 65, 91 [20] M~ilek, J. 574, 595 [133] Mallet-Paret, J. 463, 467, 484, 489, 494-496, 497 [7]; 497 [14]; 498 [39]; 498 [40]; 498 [41]; 498 [42]; 498 [43]; 498 [44]; 498 [45]; 498 [46]; 498 [47]; 498 [48]; 498 [49]; 854, 856-858, 878 [43]; 878 [44]; 878 [67]; 880 [ 123]; 880 [ 124]; 880 [ 125]; 924, 929, 934, 951,958, 970, 976 [65]; 979 [147]; 979 [148] Malo, S. 357, 387 [80] Manakov, S. 603,674 [ 158] Marl& B. 568, 595 [134] Marl& R. 871,880 [126]; 924-926, 979 [149] Mangus, N. 77, 91 [ 11 ] Manley, O. 567, 568, 592 [30]; 592 [55]; 592 [56]; 593 [75]; 593 [76]; 593 [77]; 593 [78]; 596 [135]; 931,976 [70]
1068
A u t h o r Index
Manneville, E 638, 673 [137]; 762, 775, 776, 803, 832 [92] Manor, Y. 48, 49, 51, 52 [39]; 52 [40]; 53 [47] Marchesoni, E 640, 673 [138] Marchioro, C. 509, 580, 587-590, 592 [38]; 592 [39]; 596 [136] Marcus, M. 701, 702, 719 [26]; 721 [58]; 721 [59]; 721 [601; 721 [611 Marcus, P. 579, 596 [137] Marder, E. 5, 46-49, 52 [39]; 53 [41]; 53 [42]; 53 [47]; 53 [53]; 53 [56]; 123, 145 [68] Marek, M. 151,218 [47] Marsden, J. 184, 218 [55]; 370, 389 [ 135]; 514, 590 [ 1]; 891,901,975 [37] Martel, Y. 740, 741,757 [58] Martienssen, W. 79, 91 [18] Martin, R. 852, 880 [ 127] Massatt, E 855, 865, 879 [88]; 881 [128]; 899, 903, 911, 958, 968, 979 [150]; 979 [151]; 979 [152]; 97911531
Masuda, K. 741,742, 758 [59] Matano, H. 729, 743, 756 [12]; 756 [18]; 843, 850-853, 855, 858, 876 [2]; 877 [37]; 877 [38]; 881 [129]; 881 [130]; 881 [131]; 881 [132]; 881 [133]; 881 [134]; 881 [135]; 881 [136]; 881 [137]; 954, 958, 979 [154]; 979 [155] Mather, J. 377, 389 [116]; 389 [117]; 389 [118]; 389 [119]; 389 [120]; 389 [121] Matkovsky, B. 773,832 [93] Mato, G. 41, 52 [23] Matos, J. 735, 758 [60]; 758 [61] Mattheij, R. 359, 363,385 [9]; 1035, 1036, 1049 [8] Matveev, V. 616, 673 [139] Maxey, M. 67, 90 [2] McCauley, J. 316, 344 [29] McCord, C. 426, 431, 434, 447, 459 [45]; 459 [46]; 459 [47]; 459 [48]; 463,484, 498 [50] McCormick, D. 95, 103, 138-141, 143 [3]; 144 [19]; 144 [21]; 144 [31]; 144 [41]; 146 [78]; 146 [80] McCracken, M. 184, 218 [55] McDuff, D. 399, 460 [66] McGehee, R. 365, 385 [8] Mclntyre, M. 80, 91 [31 ] McKean, H. 613, 631, 640, 669 [14]; 673 [140]; 673 [141]; 673 [142]; 673 [143] McKenney, A. 1036, 1049 [7] McLaughlin, D. 608, 612-614, 616-619, 621, 627631, 638, 639, 641, 643, 645, 646, 648, 650, 661, 663, 665-667, 669 [15]; 669 [28]; 670 [31]; 670 [34]; 670 [35]; 671 [60]; 671 [61]; 671 [63]; 671 [70]; 671 [71]; 672 [94]; 672 [95]; 672 [101]; 672 [102]; 673 [130]; 673 [131]; 673 [136]; 673 [144]; 674 [145]; 674 [146]; 674 [147]; 674 [148]; 674 [149]
McLaughlin, K. 661,668, 670 [46]; 670 [47]; 671 [75] McLaughlin, R. 640, 672 [ 107] McLeod, J. 725, 756 [23] Medvedev, G. 49, 53 [43]; 53 [44] Meerbergen, K. 383,389 [ 122] Mehlhorn, K. 231,264 [36] Mei, Z. 165,219 [56] Meinhardt, H. 703, 720 [47]; 721 [62] Meiss, J. 60, 91 [30] Melbourne, I. 764, 771, 813, 827, 832 [94]; 1048, 1051 [74] Melnikov, V. 214, 219 [57]; 370, 389 [123] Meloon, B. 362, 387 [81] Mendelson, N. 700, 721 [63] Mendelson, E 887, 979 [156] Merino, S. 865,878 [53] Merle, E 725, 730, 731,733, 736, 756 [16]; 756 [22]; 758 [62]; 758 [63]; 758 [64] Meron, E. 679, 721 [64]; 1002, 1033, 1034, 1050 [52]; 1053 [ 1171 Meunier, C. 41, 52 [23] Meyer, K. 318, 319, 325, 344 [28] Meyer, Y. 579, 593 [70] Mielke, A. 763-765, 771,774, 776, 779-783,786, 792, 795, 796, 798-803, 805, 806, 811, 813-815, 820822, 824-826, 829 [2]; 829 [3]; 829 [4]; 829 [5]; 831 [58]; 832 [72]; 832 [73]; 832 [74]; 832 [87]; 832 [95]; 832 [96]; 833 [97]; 833 [98]; 833 [99]; 833 [100]; 833 [101]; 833 [102]; 833 [103]; 833 [104]; 833 [105]; 833 [106]; 833 [107]; 833 [108]; 865, 881 [138]; 913, 919, 980 [157]; 980 [158]; 980 [159]; 1001, 1042, 1047, 1049 [23]; 1051 [64]; 1053 [118]; 1053 [119]; 1053 [120] Mierczyfiski, J. 848, 849, 851, 857, 881 [139]; 881 [140]; 881 [141]; 881 [142]; 881 [143]; 881 [144]; 881 [145] Mikhailov, A. 736, 756 [27]; 758 [73] Miles, R. 20, 53 [61]; 95, 146 [89] Miller, J. 585,596 [138] Miller, P. 64, 67, 68, 70-72, 74, 75, 87-89, 91 [32]; 91 [33]; 92 [41]; 92 [44]; 663, 667, 674 [150] Miller, R. 889, 915, 980 [160]; 980 [161] Milnor, J. 411,459 [49]; 887, 980 [162] Mimura, M. 1009, 1046, 1053 [ 129] Miranville, A. 831 [53] Mirollo, R. 40, 53 [45] Mischaikow, K. 426, 430, 431,434, 436, 445,447, 455, 458, 458 [5]; 458 [61; 458 [171; 459 [281; 459 [291; 459 [32]; 459 [33]; 459 [43]; 459 [44]; 459 [46]; 459 [47]; 459 [48]; 459 [50]; 459 [51]; 459 [52]; 459 [53]; 459 [54]; 460 [55]; 460 [56]; 460 [57]; 460 [58]; 460 [59]; 460 [60]; 463, 484, 498 [50]; 851,878 [55]; 922, 966, 967, 980 [163]; 980 [164] Mischenko, E. 127, 145 [50]
A u t h o r Index
Miura, R. 101,143 [16]; 609, 611,671 [77]; 671 [78]; 67411511
Mizel, V. 685, 693, 701, 702, 719 [26]; 720 [54]; 721 [65] Mizoguchi, N. 737, 738, 758 [65]; 758 [66] Mohammadi, B. 596 [139] Moise, I. 910, 974, 977 [91]; 980 [166] Mollenauer, L. 608, 674 [152] Moloney, J. 608, 674 [157]; 700, 720 [52]; 720 [53] Monteiro, A. 182, 217 [23] Montgomery, D. 584, 594 [99] Montgomery, R. 666, 671 [61] Moore, G. 165, 172, 179, 218 [53]; 219 [58]; 219 [59]; 219 [60]; 383,387 [64] Mora, X. 858, 865,877 [27]; 936, 966, 967, 980 [167] Morita, Y. 431,459 [54] Morris, C. 17, 42,53 [46]; 122, 145 [51] Morrison, P. 63, 91 [ 17] Moser, J. 603,629, 674 [153] Movahedi-Lankarani, H. 926, 980 [ 165] Mrozek, M. 420, 445, 447, 455, 458, 459 [41]; 459 [42]; 459 [48]; 460 [55]; 460 [56]; 460 [57]; 460 [58]; 460 [59]; 460 [61]; 460 [62]; 460 [63]; 460 [64]; 460 [65]; 922, 980 [163] Muraki, D. 704, 720 [48] Murray, J. 837, 881 [146]; 985,990, 1048, 1053 [121] Murray, R. 257, 264 [37] Musher, S. 614, 641,675 [ 198] Muto, V. 640, 674 [154]; 674 [155] Myers, M. 160, 218 [37]; 383,384, 387 [82]; 387 [83] Nadim, E 48, 49, 52 [39]; 53 [47] Nadirashvili, N. 809, 831 [66]; 848, 881 [147] Nagasaki, K. 744, 758 [67] Namah, G. 864, 881 [148] Natiello, M. 1037, 1055 [191] Neishtadt, A. 103, 145 [53]; 276, 279, 285, 298-300, 311 [2]; 312 [21] Nelkin, M. 561,594 [89] Nelson, D. 646, 671 [76] Neubelt, M. 608, 6 74 [ 152] Newell, A. 603, 608, 674 [156]; 674 [157]; 700, 716718, 720[32]; 720[35]; 720[52]; 720[53]; 721 [66]; 721 [67]; 721 [68]; 721 [73]; 762, 775, 776, 785, 786, 833 [109]; 833 [110]; 833 [111]; 833 [112] Newton, P. 681,682, 689, 721 [69]; 721 [70] Ni, W.-M. 739, 743, 747, 748, 757 [35]; 758 [68]; 758 [69]; 758 [70]; 859, 860, 879 [81]; 879 [82] Nickel, K. 852, 881 [149]; 954, 980 [168] Nicolaenko, B. 509, 510, 526, 527, 565,574-578, 580, 591 [5]; 591 [6]; 591 [7]; 591 [8]; 591 [9]; 591 [10]; 591 [11]; 591 [12]; 591 [13]; 591 [29]; 593 [57]; 593 [65]; 593 [66]; 593 [67]; 593 [79]; 595 [119];
1069
786, 798, 824, 830 [44]; 925, 926, 970, 975 [18]; 976 [56]; 980 [ 169] Nii, S. 989, 1009, 1031, 1032, 1053 [122]; 1053 [123]; 1053 [124]; 1053 [125]; 1053 [126] Nikolaev, E. 169, 187, 193,218 [46]; 360, 388 [102] Nirenberg, L. 521,592 [33]; 743, 757 [35]; 859, 860, 877 [20]; 877 [21]; 879 [81]; 879 [82] Nishida, T. 534, 549, 596 [140]; 596 [141] Nishiura, Y. 431,459 [43]; 704, 721 [71]; 1009, 1046, 1052 [88]; 1053 [127]; 1053 [128]; 1053 [129] Nitecki, Z. 288, 312 [22] Nohel, J. 946, 979 [143] NCrsett, S. 348, 349, 388 [86] Novikov, S. 603,674 [ 158] Nozaki, K. 971,980 [ 170] Nozakki, B. 774, 795,829 [12] Nussbaum, R. 463, 467, 479, 480, 483, 484, 487, 489, 490, 494-496, 498 [40]; 498 [41]; 498 [42]; 498 [43]; 498 [44]; 498 [45]; 498 [46]; 498 [47]; 498 [51]; 498 [52]; 498 [53]; 498 [54]; 498 [55]; 498 [56]; 498 [57]; 498 [58]; 498 [59]; 498 [60]; 498 [61]; 498 [62]; 499 [63]; 499 [64]; 499 [65]; 889, 911,945,946,9801171]; 9801172]; 9801173]; 9801174]
Nusse, H. 70, 91 [34] Nyman, B. 608, 674 [ 152] Oakson, G. 120, 146 [77] Ochs, G. 223,264 [29] Ockendon, J. 763,776, 830 [23] O'Donovan, M. 100, 146 [81] Oesterl6, J. 571,593 [64]; 925, 976 [54] Ogiwara, T. 851,881 [136]; 881 [137] O'Hern, C. 636, 674 [159] Ohkitani, K. 570, 596 [142] Ohnishi, I. 704, 721 [71 ] Ohta, T. 704, 721 [72] Oka, H. 431,436, 445, 459 [32]; 459 [43]; 459 [44]; 1032, 1052 [104] Okubo, A. 837, 881 [150] Oliva, W. 430, 459 [37]; 858, 879 [77]; 887, 897, 920922, 924, 978 [103]; 980 [175] Oliver, M. 798-800, 803,829 [10]; 832 [88]; 832 [89]; 933,973,980 [ 176] Olson, E. 565, 578, 593 [80]; 976 [71] Ono, H. 774, 831 [68] Onsager, L. 587, 596 [143] Or-Guil, M. 1033, 1034, 1053 [130] Orszag, S. 509, 596 [144]; 646, 675 [194] Osborn, J. 244, 264 [38] Oseledec, V. 372, 389 [ 124] Osinga, H. 367, 368, 385 [24]; 388 [104]; 389 [125]; 389 [ 126] Osipenko, G. 231,264 [39]
1070
A u t h o r Index
Ostrouchov, S. 1036, 1049 [7] Ott, E. 316, 329, 332, 333, 344 [19]; 371,387 [71] Ottino, J. 58, 78, 91 [35] Ovchinnikov, Y. 788, 789, 833 [113] Overman, E. 613, 614, 618, 619, 628, 629, 638, 669 [15]; 674 [145]; 674 [149] Packard, N. 387 [63] Paladin, G. 762, 775, 803, 830 [ 17] Palis, J. 870, 881 [151]; 920, 922, 937, 980 [177]; 980 [ 178]; 980 [ 179] Palmer, K. 315, 318, 320, 343, 344 [7]; 344 [8]; 344 [9]; 344 [10]; 354, 355, 386 [28]; 386 [30]; 386 [31]; 870, 881 [152]; 997, 998, 1053 [131]; 1053 [ 132] Palmore, J. 316, 344 [29] Pandit, R. 646, 672 [93] Papanicolaou, G. 650, 672 [108] Paparella, F. 77, 91 [36] Paraskevopoulos, P. 467, 489, 494, 498 [47]; 499 [66] Parisi, G. 646, 672 [ 100] Pascal, E 579, 593 [70] Pascal, M. 41, 52 [ 18] Passot, T. 718, 720 [35]; 721 [66]; 721 [67]; 721 [73]; 762, 833 [110] Patera, A. 338, 344 [35] Payne, L. 858, 880 [ 115] Pazy, A. 468,499 [67]; 840, 881 [153]; 980 [180]; 986, 1041, 1053 [133] Pego, R. 713, 719 [20]; 990, 1005, 1006, 1008, 1009, 1011, 1014, 1015, 1034, 1044, 1049 [26]; 1053 [134]; 1053 [135]; 1053 [136] Peletier, L. 685, 693,702, 721 [65] Pelikan, S. 365, 388 [ 101] Penrose, O. 715, 720 [44] Percival, I. 60, 91 [30] Perko, L. 324, 344 [30] Pernarowski, M. 101,145 [54]; 851,878 [55] Pesch, W. 775,776, 830 [33] Peterhof, D. 822, 827, 828, 833 [114]; 994, 995, 1046, 1053 [113]; 1053 [137] Peterson, J. 763, 776, 831 [45] Petrich, D. 704, 720 [48] Petzeltov& H. 864, 865, 878 [60] Petzold, L. 348, 350, 385 [10] Pierrehumbert, R. 79, 92 [37] Pillet, C.-A. 609, 674 [160] Pilyugin, S. 917, 974 [7] Pinsky, P. 116, 125, 145 [55] Pinto, D. 38, 39, 52 [28]; 53 [48] Pironneau, O. 596 [139] Pitaevskii, L. 603, 674 [ 158] Plant, R. 105, 145 [56] Pliss, V. 914, 980 [181]
Poincar6, H. 303, 312 [23] Poje, A. 74, 75, 87, 90, 91 [23]; 91 [24]; 92 [38]; 92 [46] Pol~i~ik, P. 743, 745-747, 749, 756 [13]; 756 [19]; 758 [71]; 758 [72]; 847-851, 853, 855, 858, 861866, 868, 869, 871, 873-875, 877 [27]; 877 [28]; 877 [29]; 877 [39]; 877 [40]; 878 [51]; 878 [61]; 878 [68]; 879 [73]; 879 [93]; 879 [98]; 879 [99]; 881 [145]; 881 [154]; 881 [155]; 881 [156]; 882 [157]; 882 [158]; 882 [159]; 882 [160]; 882 [161]; 882 [162]; 882 [163]; 882 [164]; 882 [165]; 882 [166]; 896, 937, 951,952, 958, 965, 975 [25]; 975 [26]; 976 [66]; 980 [182]; 980 [183]; 980 [ 1841 Ponce, E. 179, 214, 219 [64] Ponce, G. 522, 594 [104] Pontryagin, L. 214, 219 [61]; 470, 480, 482, 499 [68] Porcello, D. 139, 141,144 [36] Posashkov, S. 725, 726, 731,733, 756 [28]; 756 [29] Poschel, J. 603,612, 613, 672 [99]; 674 [161] Po2niak, M. 442, 460 [67] Pratt, L. 63, 64, 67, 68, 70-72, 74, 87-89, 91 [32]; 91 [33]; 92 [39]; 92 [41] Pra25_k, D. 574, 595 [133] Prince, D. 141,144 [35] Prince, P. 237, 263 [ 18] Prizzi, M. 869, 874, 875, 882 [167]; 882 [168]; 882 [ 169] Procaccia, I. 631,638, 671 [80] Prodi, G. 553,593 [81]; 931,970, 977 [72] Promislow, K. 927, 933, 951,980 [185]; 1017, 1044, 1052 [109]; 1052 [110] Protter, M. 843, 882 [170] Provenzale, A. 77, 78, 91 [26]; 91 [36]; 92 [40] Prtiss, J. 1041, 1053 [138] Pryce, J. 169, 218 [33]; 382, 387 [70] Pugh, C. 354, 365, 371, 388 [93]; 389 [127]; 871, 88O[lO3]
Pulvirenti, M. 509, 529, 530, 536, 580, 587-590, 592 [38]; 592 [39]; 592 [43]; 594 [95]; 596 [136] Pumir, A. 638, 674 [ 170] Qin, w.-x. 913,980 [ 186] Rabinowitz, E 696, 697, 720 [28]; 720 [29]; 721 [74] Rauch, J. 512, 596 [145]; 969, 975 [17] Rauenzahn, R. 509, 592 [31] Raugel, G. 527, 596 [146]; 787, 805, 807, 822, 831 [65]; 833 [115]; 853, 858, 863, 865, 879 [89]; 879 [90]; 879 [91]; 882 [171]; 896, 898, 912, 913, 915, 918-920, 922, 927, 930-934, 936, 937, 940, 942, 944, 948, 951-954, 962-970, 973, 975 [27]; 977 [77]; 978 [101]; 978 [104]; 978 [105];
Author Index 978 [106]; 978 [107]; 978 [108]; 978 [109]; 978 [110]; 978 [111]; 978 [112]; 978 [113]; 980 [164]; 981 [187]; 981 [188]; 981 [189]; 1042, 1051 [65]; 1051 [66]; 1052 [103]; 1053 [139] Reddien, G. 173, 212, 218 [35]; 218 [36] Reddy, S. 1005, 1054 [ 140] Reineck, J. 431, 432, 445, 447, 459 [32]; 460 [58]; 460 [60]; 460 [68] Ren, X. 705, 719 [8]; 719 [24] Reyna, L. 713, 721 [75] Reynolds, O. 338, 344 [31] Reynolds, W. 568, 596 [ 154] Rheinboldt, W. 151,155, 166, 219 [62]; 219 [63]; 379, 385 [231 Rhines, P. 88, 91 [27] Richeson, D. 414, 420, 426, 447,458 [24]; 460 [69] Riecke, H. 700, 720 [30]; 721 [76] Rinzel, J. 5, 17, 24, 41, 42, 47, 51, 52 [40]; 53 [49]; 53 [54]; 53 [57]; 54 [69]; 54 [70]; 95-98, 100,
101, 103, 105, 113, 116, 119, 122, 123, 125, 138142, 143 [2]; 143 [7]; 143 [8]; 143 [11]; 144 [26]; 144 [27]; 144 [28]; 144 [29]; 145 [55]; 145 [57]; 145 [58]; 145 [59]; 145 [60]; 145 [61]; 145 [69]; 145 [70]; 146 [81]; 146 [93]; 146 [94]; 146 [95]; 146 [96] Ritt, J. 23, 24, 26, 27, 29, 30, 49, 51 [10]; 52 [39]; 54 [71]; 123, 146 [97] Robbin, J. 420, 426, 447, 453,460 [70]; 460 [71] Robert, R. 585,596 [147]; 596 [148] Robinson, C. 407, 460 [72]; 460 [73]; 870, 871, 882 [172]; 926, 927, 981 [190] Rocha, C. 743, 749, 756 [17]; 858, 878 [69]; 879 [70]; 879 [78]; 882 [173]; 955-957, 976 [67]; 976 [68]; 977 [76]; 981 [191] Rodrfguez-Luis, A. 179, 214, 219 [64] Roelfsema, P. 38, 53 [50] Rogers, T. 711,720 [34] Rogerson, A. 64, 67, 68, 70-72, 74, 89, 91 [32]; 92 [41] Rom-Kedar, V. 60, 92 [42]; 92 [43] Romeiras, R. 316, 329, 332, 333,344 [19] Roose, D. 175, 212, 219 [65]; 219 [66]; 383, 384, 389 [ 122]; 389 [ 128]; 497 [ 11]; 498 [37] Roquejoffre, J.-M. 864, 881 [148]; 882 [174]; 882 [175]; 989, 1045, 1054 [141] Rosa, R. 567, 593 [75]; 910, 974, 980 [166] Rose, H. 640, 673 [127]; 673 [128] Rose, R. 101,144 [32] Rossby, H. 62, 91 [8] Rossignol, S. 95, 143 [13] Rothenberg, J. 661,674 [162]; 674 [163] Rottschafer, V. 773, 830 [40] Rougemont, J. 787, 831 [52] Roussarie, R. 379, 386 [55]; 386 [56] Rowlands, G. 789, 826, 830 [21 ]
1071
Rozov, N. 127, 145 [50] Rubenchik, A. 614, 641,675 [198] Rubin, J. 7, 41-46, 50, 53 [51]; 53 [52]; 95, 109, 113, 123, 124, 129, 131, 132, 134, 136-142, 145 [62]; 145 [63]; 145 [64]; 145 [65]; 1009, 1017, 1045, 1052 [96]; 1054 [142] Ruelle, D. 239, 263 [3]; 264 [40]; 369, 372-374, 387 [58]; 387 [59]; 389 [129]; 389 [130]; 849, 882 [ 176] Ruiz, A. 969, 981 [192] Rumpf, M. 232, 263,263 [12]; 264 [41] Russell, R. 157, 179, 217 [3]; 218 [53]; 219 [67]; 359, 363, 366, 373, 385 [9]; 386 [45]; 386 [46]; 1035, 1036, 1049 [8] Rutman, M. 880 [114] Rybakowski, K. 395,420, 460 [74]; 463,484, 499 [69]; 866, 868, 869, 872-875, 882 [161]; 882 [162]; 882 [168]; 882 [169]; 882 [177]; 882 [178]; 882 [ 179]; 882 [ 180]; 897, 937, 947, 948, 978 [ 114]; 980 [184]; 981 [193]; 981 [194] Rychlik, M. 367, 389 [ 131] Sachs, R. 1009, 1043-1045, 1049 [5]; 1053 [115]; 1053 [ 116] Sacks, P. 739, 747, 748, 758 [68]; 758 [69]; 758 [70]; 858, 877 [34]; 880 [115] Saint Raymond, L. 550, 594 [92] Saito, N. 646, 675 [ 182] Sakaguchi, H. 700, 721 [77]; 721 [78] Salamon, D. 399, 407, 420, 426, 440, 447, 453, 460 [66]; 460 [70]; 460 [71]; 460 [75] Salle, M. 616, 673 [139] Samarskii, A. 736, 756 [27]; 758 [73] Samelson, R. 63, 64, 86, 91 [14]; 92 [45] Sammartino, M. 555,592 [37] Sander, E. 711,721 [79] Sanders, J. 200, 219 [68]; 367, 370, 381,389 [132]; 3891133]
Sandstede, B. 74, 75, 88, 90 [3]; 92 [44]; 157, 180182, 190, 191, 193, 217 [12]; 217 [20]; 219 [69]; 219 [70]; 379, 385 [27]; 774, 797, 798, 832 [82]; 833 [116]; 853, 855, 875, 877 [29]; 879 [71]; 882 [181]; 989, 990, 994, 995,997, 999, 1005, 1006, 1009, 1010, 1014, 1016, 1017, 1020-1022, 10251029, 1031-1039, 1041, 1044, 1046-1048, 1049 [6]; 1049 [14]; 1050 [29]; 1050 [44]; 1051 [56]; 1052 [97]; 1052 [98]; 1052 [105]; 1053 [113]; 1053 [126]; 1053 [137]; 1054 [143]; 1054 [144]; 1054 [145]; 1054 [146]; 1054 [147]; 1054 [148]; 1054 [149]; 1054 [150]; 1054 [151]; 1054 [152]; 1054 [153]; 1054 [154]; 1054 [155]; 1054 [156]; 1054 [157]; 1054 [158]; 1054 [159]; 1054 [160]; 1054 [161]; 1055 [190]
1072
Author Index
Sanz-Serna, J. 315, 318, 320, 344 [32]; 352, 389 [134] Sardella, M. 895, 899, 900, 977 [86] Satin, L. 100, 143 [15] Sattinger, D. 1005, 1006, 1041, 1042, 1054 [162] Sauer, T. 315-318, 320, 321,323-325, 332, 333, 335, 338, 344 [14]; 344 [18]; 344 [33]; 344 [34]; 926, 981 [ 195] Sauzin, D. 302, 312 [ 16] Scarpellini, B. 765, 783, 786, 833 [117]; 1001, 1054 [163]; 1054 [164] Schachmanski, I. 297, 302, 312 [20] Schaeffer, D. 996, 1051 [75] Schatz, M. 338, 344 [35] Schecter, S. 180, 181,192, 219 [71]; 219 [72] Scheel, A. 763, 798, 833 [116]; 833 [120]; 834 [121]; 989, 994, 995, 997, 999, 1005, 1006, 1021, 1022, 1025-1027, 1032, 1036-1039, 1041, 1046-1048, 1051 [56]; 1051 [57]; 1053 [113]; 1053 [137]; 1054 [1521; 1054 [153]; 1054 [154]; 1054 [155]; 1054 [156]; 1054 [157]; 1054 [158]; 1054 [159]; 1054 [160]; 1054 [161]; 1054 [165] Scheffer, V. 581,596 [149] Scheurer, B. 970, 980 [ 169] Scheurle, J. 270, 276, 312 [9]; 370, 389 [135]; 927, 928, 932, 978 [115] Schmidt, L. 365,388 [ 101 ] Schmitt, E. 463, 499 [70] Schneider, G. 763-765, 773-775, 777, 779, 801,802, 805, 810, 815, 816, 818-822, 824-829, 830 [19] 831 [67]; 832 [87]; 833 [105]; 833 [106]; 833 [107] 833 [108]; 833 [114]; 834 [122]; 834 [123] 834 [124]; 834 [125]; 834 [126]; 834 [127] 834 [128]; 834 [129]; 834 [130]; 834 [131] 834 [132]; 834 [133]; 834 [134]; 834 [135] 834 [136]; 913, 980 [159]; 1041, 1047, 1054 [166] 1054 [167]; 1055 [168]; 1055 [169] Schneider, K. 579, 593 [71 ] Schober, C. 631,669 [ 1] Schuster, H. 638, 671 [82] Schfitte, C. 223, 249, 263 [14]; 263 [15]; 264 [42] Schfitze, O. 228, 263 [13] Schwartz, J. 95,144 [40] Scott, A. 608, 631, 640, 674 [146]; 674 [154]; 6741155]
Sedgwick, A. 382, 388 [95] Segel, L. 762, 776, 830 [35]; 834 [137] Segev, I. 51, 52 [40] Segur, H. 631, 661,674 [ 164]; 674 [ 165]; 674 [ 166]; 674 [ 167] Seibert, N. 887, 974 [6] Sejnowski, T. 95, 96, 103, 123, 138-142, 143 [6]; 144 [18]; 144 [19]; 144 [20]; 144 [21]; 144 [22]; 146 [80]
Sell, G. 495, 498 [48]; 498 [49]; 527, 573, 574, 593 [79]; 593 [82]; 596 [146]; 858, 861, 864, 877 [16]; 880 [123]; 880 [124]; 889, 897, 915, 934, 951, 977 [73]; 979 [148]; 980 [161]; 981 [196]; 981 [197]; 981 [198] Senn, W. 100, 146 [81 ] Serrin, J. 522, 596 [150]; 860, 882 [182] Sertl, S. 228, 250, 251,263 [6]; 263 [13] Seul, M. 704, 721 [80] Seydel, R. 151,219 [73] Shabat, A. 609, 610, 675 [199] Sharp, A. 48, 53 [53] Shatah, J. 608, 609, 621,627-631,646, 648, 670 [34]; 670 [35]; 671 [83]; 671 [84]; 673 [131]; 674 [147]; 674 [148]; 674 [168]; 1043, 1044, 1051 [78]; 1051 [79] Shaw, R. 387 [63] She, Z. 575,593 [66] Shelley, M. 650, 669 [28] Shen, W. 849, 857, 858, 882 [183] Sheng, P. 649, 674 [ 169] Shepeleva, A. 774, 833 [118]; 833 [119] Sherman, A. 17-19, 51, 53 [54]; 53 [57]; 53 [66]; 95, 96, 100, 143 [4]; 145 [66]; 145 [67]; 145 [69] Shilnikov, L. 1026, 1032, 1055 [ 170] Shinbrot, M. 522, 594 [100] Shnirelman, A. 581,596 [ 151 ] Showalter, K. 985,990, 1052 [99] Shraiman, B. 638, 672 [91]; 674 [170] Shub, M. 227, 264 [43]; 354, 356, 365, 371,388 [93]; 389 [127]; 389 [136]; 871,880 [103] Sideris, T. 512, 596 [152] Sidorov, N. 371,389 [137] Sidorowich, J. 374, 385 [ 1] Sigal, I. 788, 789, 833 [113] Sigvardt, K. 46, 53 [42] Sim6, C. 268, 279, 289, 293,311 [5]; 311 [7]; 312 [8]; 312 [24]; 370, 389 [138]; 389 [139] Simon, L. 866, 867, 883 [184]; 951,981 [199] Simondon, E 858, 878 [62]; 878 [63] Sinai, Y. 239, 264 [44]; 274, 312 [25] Singer, W. 5, 38, 53 [50]; 53 [55]; 95, 138, 143 [9] Sinha, A. 640, 671 [73] Skinner, F. 47, 48, 53 [53]; 53 [56]; 123, 145 [68] Slemrod, M. 887, 888, 896, 903,904, 977 [ 100] Slijep~evi6, S. 787, 831 [59]; 834 [138] Smagorinsky, J. 596 [153] Smale, S. 321, 322, 332, 344 [1]; 353, 354, 358, 369-371,385 [2]; 389 [140]; 390 [141]; 618, 629, 674 [171]; 920, 922, 980 [178] Smith, H. 494, 497 [34]; 499 [71]; 843, 845, 848, 851, 852, 858, 880 [125]; 880 [127]; 883 [185]; 883 [ 186]; 883 [ 187]; 883 [ 188] Smith, J. 100, 116, 143 [7]; 143 [8]
Author Index
Smith, L. 568, 596 [154] Smolen, P. 51, 53 [57]; 100, 101,145 [69]; 145 [70] Smoller, J. 438, 447, 458 [11]; 458 [12]; 458 [13]; 458 [14]; 460 [76]; 843, 858, 863, 883 [189]; 883 [190]; 951,981 [200]; 985, 990, 1055 [171] Sneppen, K. 638, 646, 674 [172] Sobolev, S. 526, 596 [155] Softer, A. 609, 631,674 [173]; 675 [174]; 675 [175] Sohr, H. 521,596 [156] Solh-Morales, J. 858, 865, 877 [27]; 936, 966, 967, 980 [ 167] Somers, D. 45, 46, 52 [36]; 53 [58]; 53 [59]; 113, 116, 145 [45]; 146 [71]; 146 [72] Sommeria, J. 585,596 [148] Sompolinsky, H. 339-341, 344 [3]; 638, 672 [89]; 6751176]
Sone, Y. 590 [2] Soner, H. 788, 789, 832 [76] Sorensen, D. 262, 264 [34]; 383, 390 [142]; 1036, 1049 [7] Sorger, R 763, 832 [86] Sogovi6ka, V. 855, 868, 882 [163] Soto, C. 123, 146 [97] Soto-Trevino, C. 23, 24, 26, 29, 30, 51, 52 [32]; 54 [71]; 105, 146 [73] Sotomayor, J. 379, 386 [55]; 386 [56] Souillard, B. 650, 670 [55] Souli, M. 718, 721 [67] Spalding, D. 522, 527, 551,595 [ 117] Spanier, E. 411,460 [77] Speer, E. 640, 673 [127]; 673 [128] Spence, A. 172, 212, 219 [60]; 219 [74]; 383,387 [64]; 389 [ 122] Spencer, T. 649, 675 [177] Spiegel, E. 203,217 [13]; 1033, 1050 [52] Spiteri, R. 157, 216 [2] Stanford, I. 32, 53 [63] Stasheff, J. 411,459 [49] Stein, E. 596 [157] Steinberg, V. 338, 344 [5] St6phanos, C. 160, 219 [75] Stephen, M. 646, 671 [76] Steriade, M. 95, 120, 138, 139, 141, 142, 143 [14]; 144 [20]; 146 [74]; 146 [75]; 146 [76]; 146 [77]; 146 [78]; 146 [79]; 146 [80] Stewartson, K. 733, 757 [48]; 762, 775,776, 779, 780, 795,830 [32]; 831 [69]; 834 [139] Straughan, B. 858, 880 [115] Strauss, W. 587, 591 [23]; 603, 605, 606, 608, 609, 671 [83]; 671 [84]; 675 [178]; 1043, 1044, 1051 [78]; 1051 [79] Strelcyn, J.-M. 372, 385 [13] Strogatz, S. 40, 53 [45] Strzodka, R. 232, 263 [12]
1073
Stuart, A. 352,390 [143]; 915,981 [201] Stuart, J. 733, 757 [48]; 762, 795,834 [139]; 834 [140] Stubbe, J. 970, 976 [43] Sturmfels, B. 383,387 [83] Sulem, C. 774, 830 [31 ] Sulem, P.-L. 561,594 [89]; 774, 830 [31] Suris, Y. 291,312 [26] Suzuki, T. 744, 758 [67] Suzuki, Y. 1009, 1046, 1052 [88] Svanidze, N. 297, 312 [14] Swartz, B. 157, 217 [14] Swift, J. 374, 385 [22]; 700, 701,721 [81] Swinney, H. 338, 344 [35]; 374, 385 [22]; 637, 675 [1831 Szmolyan, R 989, 1052 [105] Szymczak, A. 420, 444, 455, 458, 460 [59]; 460 [78]; 460 [791; 460 [801 Tabak, E. 641,643,645,673 [136] Tabak, J. 100, 146 [81] Tabanov, M. 273, 295, 297, 302, 312 [15]; 312 [20] Tagg, R. 338, 344 [35] Takfi6, R 848, 850, 851, 883 [191]" 883 [192]" 883 [193]; 883 [194]; 883 [195]; 883 [196] Takaishi, T. 431,459 [43] Takens, F. 372, 374, 378, 389 [130]; 390 [144]; 390 [145]; 565,596 [158] Takhtajan, L. 603, 611,671 [64] Tan, B. 939, 975 [33] Tanaka, S. 613,670 [43] Tang, T. 179, 218 [54] Tanga, P. 77, 91 [36] Taniuchi, Y. 523,594 [ 103] Tartar, L. 554, 596 [159]; 942, 950, 975 [19] Tavantzis, J. 739, 758 [70] Temam, R. 430, 460 [81 ]; 509, 565,567-578, 592 [56]; 593 [57]; 593 [58]; 593 [59]; 593 [67]; 593 [68]; 593 [75]; 593 [76]; 593 [77]; 593 [78]; 593 [79]; 593 [82]; 594 [83]; 594 [84]; 594 [85]; 596 [160]; 596 [161]; 787, 802, 805,808, 824, 834 [141]; 889, 904, 908, 923-927, 931, 933, 934, 951, 960, 964, 967, 970, 976 [45]; 976 [55]; 976 [56]; 976 [70]; 977 [73]; 977 [74]; 977 [75]; 977 [84]; 977 [85]; 980 [169]; 981 [202] Tereg6~ik, I. 847, 849-851, 855-858, 882 [164]; 882 [165]; 883 [197]; 883 [198] Terman, D. 7, 41-46, 50, 53 [51]; 53 [52]; 53 [60]; 95, 97, 100, 101, 106, 107, 109, 110, 113, 116, 117, 120-125, 128, 129, 131,132, 134, 136-142, 143 [5]; 145 [46]; 145 [61]; 145 [62]; 145 [63]; 145 [64]; 145 [65]; 145 [70]; 146 [82]; 146 [83]; 146 [84]; 146 [85]; 146 [86]; 146 [87]; 146 [88]; 146 [91]; 989, 1045, 1054 [141]
1074
Author Index
Terraneo, E. 523,594 [87] Theodorakopoulos, N. 640, 675 [ 179] Thieme, H. 845, 848, 851,883 [ 187]; 883 [ 188] Thieullen, P. 925, 981 [203] Thomae, S. 79, 91 [ 18] Thtimmler, V. 797, 829 [ 15] Tian, E 667, 675 [ 180] Timonen, J. 640, 670 [33] Tirapegui, E. 203, 217 [26] Titi, E. 527, 565, 592 [50]; 594 [98]; 595 [131]; 774, 798, 799, 830 [41]; 831 [46]; 931, 933, 951, 970, 973,975 [41]; 976 [62]; 978 [128]; 980 [176] Toda, M. 603, 646, 675 [181]; 675 [182] Toland, J. 1032, 1049 [25] Tomei, C. 603, 611,668, 669 [ 11]; 670 [49] Toner, M. 90, 92 [46] Traub, R. 5, 20, 23, 27, 32, 34-37, 39, 51 [3]; 52 [35]; 53 [61]; 53 [62]; 53 [63]; 53 [64]; 54 [72]; 95, 120, 144 [39]; 146 [89]; 146 [98] Trefethen, L. 1005, 1054 [140]; 1055 [175] Treve, Y. 931,976 [70] Treves, Y. 593 [78] Troy, W. 457, 460 [82]; 685, 693, 702, 721 [65]; 859, 883 [ 199] Trubowitz, E. 603, 611-613, 670 [50]; 674 [161] Tsameret, A. 338, 344 [5] Tsimring, L. 374, 385 [ 1] Tu, L. 411,458 [4] Tucker, W. 240, 264 [45]; 358, 390 [146] Turaev, D. 1048, 1051 [58] Turing, A. 679, 721 [82] Tyson, J. 989, 990, 1009, 1045, 1048, 1055 [ 176] Tzanetis, D. 740, 741, 747, 748, 755, 757 [52]; 757 [53]; 757 [54]; 758 [74] Uecker, H. 765, 833 [107]; 1041, 1047, 1055 [178]; 1055 [ 179] Ukai, S. 534, 550, 591 [25]; 596 [162] Ulam, S. 238, 264 [46] Ural'ceva, N. 748, 757 [55] Ushiki, S. 289, 312 [27] Utke, J. 351,363,387 [73] Vakulenko, S. 868, 883 [200]; 883 [201]; 883 [202] van Gils, S. 184, 219 [76]; 463, 464, 468, 469, 495, 497[9]
van Harten, A. 763, 775, 815, 830 [19]; 830 [42]; 834 [142]; 834 [143] van Hemmen, J. 123, 144 [25] van Hemmen, L. 22-25, 52 [20]; 52 [30] Van Loan, C. 327, 344 [ 17] van Neerven, J. 468, 499 [72] van Saarloos, W. 638, 674 [170]; 774, 795, 834 [144]; 990, 1009, 1042, 1050 [48]; 1055 [177]
van Strien, S. 371,386 [36] van Veldhuizen, M. 365, 390 [ 147] Van Vleck, E. 343, 344 [11]; 344 [12]; 344 [13]; 355, 366, 373,386 [29]; 386 [43]; 386 [46] van Vreeswijk, C. 13, 16, 22-24, 53 [65] Vanderbauwhede, A. 727, 758 [75]; 863, 872, 883 [203]; 883 [204]; 883 [205]; 996, 1019, 1021, 1025, 1055 [180]; 1055 [181] Vanier, M. 13, 51 [ 11] Vaninsky, K. 640, 673 [143 ] vanVreeswijk, C. 123, 146 [90] Varadhan, S. 860, 877 [21] Vastano, J. 637, 675 [183] V~izquez, J. 736, 737, 739, 740, 756 [30]; 757 [31]; 757 [32]; 757 [33]; 858, 879 [80] Vegter, G. 368, 385 [24] Vel~izquez, J. 729, 730, 732-735, 755 [1]; 756 [26]; 757 [40]; 757 [41]; 757 [42]; 757 [43]; 757 [44]; 757 [45]; 757 [46]; 757 [47]; 758 [76]; 758 [77]; 758 [78]; 758 [79] Velo, G. 798, 800, 801,805, 831 [61] Venakides, S. 665, 667, 668, 670 [46]; 670 [47]; 670 [51]; 673 [126]; 675 [184] Verduyn-Lunel, S. 463, 464, 467-470, 479, 495, 497 [9]; 497 [19]; 497 [26]; 859, 879 [79]; 889, 890, 903, 945,978 [116] V6ron, L. 858, 877 [38] Vershik, A. 371,388 [ 100]; 389 [ 137] Villanueva, J. 388 [98] Vishik, M. 509, 527, 553, 567, 591 [14]; 591 [15]; 591 [16]; 591 [17]; 596 [163]; 596 [164]; 597 [165]; 597 [166]; 763, 787, 801, 802, 805, 806, 808, 829 [7]; 829 [8]; 889, 913, 915, 918, 925,939-942, 944, 951,960, 962, 963, 966, 970, 974 [8]; 974 [9]; 974 [10]; 974 [11]; 974 [12]; 974 [13]; 975 [34]; 975 [35]; 981 [204]; 1046, 1051 [57] Vishnevskii, M. 848, 851,865, 883 [206]; 883 [207]; 883 [213] Vivaldi, E 365, 387 [72] Volpert, A. 985,986, 989, 990, 1045, 1046, 1055 [182] Volpert, V. 773, 832 [93]; 985, 986, 989, 990, 1045, 1046, 1054 [141]; 1055 [182] Volterra, V. 945,981 [205]; 981 [206] von Hardenberg, J. 78, 91 [26] von Stein, A. 38, 54 [67] von Wahl, W. 521,596 [156] Vuillermot, E 851,877 [22]; 883 [208] Vulpiani, A. 762, 775, 803,830 [17] Waller, I. 338,344 [36] Wallman, H. 924, 978 [ 125] Walther, H.-O. 463, 464, 468, 469, 495, 497 [8]; 497 [9]; 497 [32]; 497 [33]; 499 [73]
Author Index
Wan, Y.-H. 184, 218 [40] Wang, D. 45, 51 [7]; 53 [60]; 113, 116, 129, 146 [87]; 146 [91] Wang, X. 705, 719 [8]; 720 [45]; 910, 974, 980 [166]; 1035, 1036, 1050 [44] Wang, X.-J. 24, 41, 42, 47, 54 [68]; 54 [69]; 54 [70]; 95, 96, 103, 119, 122, 123, 138-142, 144 [28]; 144 [29]; 145 [61]; 146 [92]; 146 [93]; 146 [94]; 146 [95]; 146 [96]; 157, 181,217 [20] Wanner, G. 348-350, 388 [86]; 388 [87] Wanner, T. 710, 711,720 [56]; 720 [57]; 721 [79] Ward, M. 713, 715, 721 [75]; 721 [83]; 721 [84]; 721 [85]; 722 [86] Warner, E 348, 390 [148] Wasserman, A. 863,883 [190]; 951,981 [200] Watson, D. 105, 146 [73] Wayne, C. 609, 630, 670 [40]; 670 [48]; 671 [59]; 674 [160]; 675 [185]; 765, 790, 791, 830 [34]; 831 [51]; 1041, 1042, 1050 [49]; 1050 [50] Webb, G. 908, 960, 965, 968, 981 [207]; 981 [208]; 981 [209] Weichman, P. 585,596 [138] Weigend, A. 374, 390 [ 149] Weinberger, H. 843,882 [170] Weinstein, A. 631,669 [14] Weinstein, M. 608, 609, 631, 674 [173]; 675 [174]; 675 [175]; 675 [186]; 675 [187]; 675 [188]; 788, 834 [145]; 990, 1005, 1006, 1008, 1009, 1011, 1014, 1015, 1044, 1053 [134]; 1053 [135]; 1053 [136]; 1055 [183] Weissler, E 523,597 [167]; 725, 758 [80] Wells, J. 939, 944, 981 [210] Werner, B. 175,219 [77] West, B. 358, 388 [94] Westervelt, R. 327, 344 [20] White, B. 650, 672 [ 108] White, J. 23, 24, 26, 27, 29, 30, 41, 51 [1]; 51 [10]; 54 [71]; 123, 146 [97] Whitehead, J. 716, 721 [68]; 762, 775,776, 833 [111]; 833 [1121 Whitham, G. 603, 607, 664, 666, 675 [1891; 675 [190] Whittington, M. 5, 23, 27, 32, 34-37, 39, 51 [3]; 52 [35]; 53 [62]; 53 [63]; 53 [64]; 54 [72]; 95, 120, 144 [391; 146 [981 Wickerhauser, M. 579, 593 [70] Wierse, A. 263, 264 [41] Wiggins, S. 60, 90 [4]; 90 [5]; 91 [16]; 91 [19]; 91 [28]; 92 [42]; 92 [43]; 92 [47]; 603, 618, 621, 627-630, 672 [881; 673 [1311; 673 [1321; 673 [1331; 674 [1451; 675 [191]; 870, 871,883 [2091; 883 [2101 Wilkinson, J. 383,390 [ 150] Williams, R. 358, 387 [84] Williams, T. 8, 54 [73] Wilson, C. 49, 54 [74]
1075
Wilson, R. 804, 834 [146]; 834 [147] Winfree, A. 31, 54 [75] Winkler, W. 612, 673 [135] Wisdom, J. 352, 390 [151] Witt, I. 966, 981 [211] Wittenberg, R. 636, 675 [ 192] Wittwer, R 1041, 1050 [50] Wolf, A. 356, 374, 385 [22]; 390 [152] Wolfrum, M. 981 [212] Wolibner, W. 515,597 [168] Worfolk, R 368, 381,388 [85]; 390 [153] Wright, E. 476, 499 [74] Wu, J. 497 [33]; 499 [75]; 852, 883 [211] Wulff, C. 798, 833 [116]; 1041, 1048, 1051 [56]; 1054 [160]; 1054 [161] Xiang, Y. 384, 390 [154] Xie, X. 495,499 [76]; 499 [771; 499 [781; 499 [79] Xin, J. 788, 789, 832 [90]; 834 [145]; 986, 1042, 1046, 1055 [1841 Xiong, C. 628, 629, 674 [1451 Xun, J. 714, 719 [91; 719 [10] Yakhot, V. 509, 596 [144]; 646, 675 [193]; 675 [194] Yakovenko, S. 367, 388 [96] Yanagida, E. 737, 738, 758 [65]; 758 [66]; 850, 882 [166]; 989, 1009, 1032, 1055 [185]; 1055 [186]; 1055 [ 187] Yang, C. 262, 264 [34] Yang, H. 79, 92 [37] Yarom, Y. 51, 52 [40]; 103, 145 [48] Yew, A. 95, 146 [88]; 1032, 1044, 1055 [188]; 1055 [189]; 1055 [190] Yi, Y. 849, 857, 858,882 [183] Yoccoz, J.-C. 365,390 [155] Yorke, J. 70, 91 [34]; 240, 264 [33]; 315-318, 320, 321, 323-325, 327, 329, 332, 333, 335, 338, 339, 344 [14]; 344 [17]; 344 [18]; 344 [19]; 344 [21]; 344 [33]; 344 [34]; 354, 355, 368, 371, 385 [4]; 387 [71]; 388 [88]; 389 [114]; 495, 496, 497 [27]; 497 [28]; 497 [29]; 926, 981 [195] Yosid, K. 468, 469, 499 [80] Yosida, K. 243,264 [47] You, Y. 889, 897, 915, 981 [198] You, Z. 371,385 [4] Young, L.-S. 240, 257, 263 [1]; 369, 371-373, 385 [12]; 390 [156]; 390 [157]; 390 [158] Yu, S.-X. 851,880 [108] Yuan, G. 79, 91 [25] Yudovich, V. 514, 515,597 [169] Zaag, H. 733,736, 756 [16]; 758 [63]; 758 [64] Zabusky, N. 64, 65, 91 [20]
1076
Author Index
Zakharov, V. 603, 609, 610, 614, 641,645, 671 [72]; 674 [158]; 675 [195]; 675 [196]; 675 [197]; 675 [198]; 675 [199]; 774, 834 [148] Zaleski, S. 638, 646, 647, 675 [200] Zaslavski, A. 701,702, 721 [60]; 721 [61]; 722 [87] Zauderer, E. 959, 981 [213] Zehnder, E. 399, 458 [15]; 458 [16]; 459 [38] Zelawski, M. 458, 460 [65] Zelenyak, T. 851,853, 865, 883 [212]; 883 [213]; 951, 953,981 [214] Zelik, S. 763, 801,804, 806, 831 [54]; 834 [149] Zemach, C. 509, 592 [31 ] Zeng, C. 627, 630, 669 [9]; 674 [168]; 871,877 [17]
Zhang, Y. 646, 672 [100] Zhou, A. 239, 263 [17] Zhou, X. 611, 630, 651-653, 659, 660, 665, 668, 670 [45]; 670 [46]; 670 [47]; 670 [51]; 670 [52]; 670 [53]; 670 [54] Zhu, H.-R. 18, 19, 53 [66] Ziegra, A. 824-826, 833 [108] Zimmermann, M. 1037, 1055 [191 ] Zl~mal, M. 966, 981 [215]; 982 [216] Zuazua, E. 968, 970, 976 [61]; 982 [217] Zumbrun, K. 1009, 1014, 1016, 1017, 1041, 1042, 1051 [72]; 1055 [192]
Subject Index
a-condensing, 910 a-contracting, 910 - of order k, 911 or-limit set, 353, 893 ot.:-limit set, 893, 898 g-pseudo-trajectory, 317 e-k model, 507 e-shadowing trajectory, 317 co-limit set, 353, 583,841,855, 864, 871,893
- dimension, 804 -exponential, 506-509, 565,573-578 -generalized limit, 807, 823 - global, 224, 505-507, 558, 565, 566, 575, 576, 580, 802, 805,887, 898, 904, 906, 940, 941, 943,946, 950, 961,973 - - minimal, 912 - hyperbolic, 244 - local, 898 - Lorenz, 235 -relative global, 225 - topological, 576 attractor-repeller pair decomposition, 399 attracts points locally, 900 augmented system, 176 - fold, 171 - Hopf, 173 -minimally, 168, 169, 185, 187, 193, 198, 212 -standard, 171,172, 185, 199 AUTO, 359 automatic differentiation, 351 averaging. 279 Avogadro number, 505, 529
absolutely continuous, 240, 241 absorbing set, 902 activator-inhibitor model, 680, 703 adaptive subdivision algorithm, 254-257 adjoint equation, 998 algebraic independence, 872, 874, 876 almost cyclic behavior, 250 almost invariant, 249-253 almost synchronous solutions, 125 alpha rhythm, 38 amalgamation, 444 amplitude equations, 716 analytic semigroup, 840 Anosov flows, 870, 871 Anosov system, 239 anticyclone of the Acores, 580 antiphase solution, 19, 109, 116, 118, 123 approximation property, 814 Arnoldi method, 262 asymptotic behavior, 838, 850-852, 867 asymptotically compact, 897 asymptotically smooth, 887, 896, 897, 904, 907910, 961,962 asymptotically smooth gradient system, 940 asymptotically smooth semigroup, 907 asymptotically stable, 901 attract, 894 attracting set, 224 attractivity property, 818 attractor, 399, 563,565, 887 -comparison of, 806
backward uniqueness, 892, 942, 950 ball Bx(e, r), 939 basic sets, 353 basin of attraction, 224 BBGKY hierarchy, 507, 529, 533, 536 B6nard convection, 700 bi-focus, 188 bifurcating solutions, 695-697 bifurcation, 374, 679, 745,748, 1026 - Bautin, 182, 186, 187, 193, 206, 216 - Bogdanov-Takens, 182, 185-187, 193, 200, 205 - codimension-2 equilibrium, 182 - codimension-3, 193 - cusp, 185, 187, 197, 200, 205 - detected, 158. 169 - double-Hopf, 171, 186, 187, 196, 200, 208, 216 -flip, 161-164, 167, 168, 176, 177 1077
1078
Subject Index
-fold, 158, 161-163, 176-178, 182, 183, 189, 193, 205 - continuation of, 172 numerical continuation of, 172 - simple, 171, 172 - f o l d + double-Hopf, 196, 197 - fold-Hopf, 185-187, 195, 200, 201,207 - Gavrilov-Guckenheimer, 185 generalized Hopf, 186, 198, 201 homoclinic - codimension-2, 187 - - saddle, 201 flip, 189 - Hopf, 6, 7, 16, 98, 103, 104, 158, 159, 163, 167, 175, 182, 184, 186, 189, 201,383 - direction of, 184 numerical continuation of, 173 - simple, 160, 167, 173, 174 194, 196, 197 - Hopf-Hopf, 187 inclination-flip, 191 - Neimark-Sacker, 161, 176, 177, 202, 203 homoclinic and heteroclinic, 1032 orbit-flip, 190, 191 point, 157 resonant double-Hopf, 197 - Shil'nikov homoclinic, 202, 203 Shilnikov-Hopf, 189 torus, 162 - triple zero eigenvalue, 194, 196 bifurcation, global, 463,494, 495 bifurcation curve, 169, 171,173 Birkhoff Ergodic Theorem, 239 Bloch-Floquet ansatz, 782 blocked connections, 957 Bogdanov-Takens bifurcation, 378, see also bifurcation Boltzmann equation, 505, 507, 510, 511,527-529, 533-536, 538, 541,544, 545, 549-551,553, 589 Boltzmann hierarchy, 533,534 Boltzmann-Grad limit, 505, 528, 529 bordered LU-decomposition, 155 bordered system, 162, 170, 171,204, 205,211,212 bordering function, 163, 177 bordering technique, 162, 169, 176, 193 Borel measure, 569 boundary condition non-transverse, 1038 -periodic, 1035, 1036 -projection, 180, 1035 -separated, 952, 1037 boundary map, 422 boundary operator, 427 -
-
-
-
-
-
-
-
h
o
m
o
c
l
i
n
i
c
-
-
-
-
-
H
-
-
-
-
-
-
-
-
o
p
f
-
B
o
g
d
a
n
o
v
-
T
a
k
e
n
s
,
boundary value method, global, 363 boundary-value problem, 359 - for PDE-spectra, 1001, 1035 - for PFDE-spectra, 1021 - for travelling waves, 1035 -truncated, 180-182, 188, 189, 191-193 bounded dissipative, 888, 902 Boussinesq equation, 558, 700 branch of homoclinic orbits, 188 branch point, simple, 165, 187, 214 branch switching, 168 at a Bautin bifurcation, 214 at a Bogdanov-Takens point, 212 at a cusp point, 210 - at codimension-2 bifurcation, 209 at simple bifurcation point, 165 at simple binors points, 164 branching equation, algebraic, 164 brittleness 13, 323, 324 bursting neurons, 41 oscillation, 95 elliptic, 96, 102 - - parabolic, 96, 104 - - square-wave, 96, 98, 106 oscillators, 7 -
-
-
-
-
-
-
-
-
-
C0-semigroup, 468, 470, 1041 C-slow entrance point, 446 C-slow exit point, 445 Cahn-Hilliard equation, 680, 708-715,774 canonical measure, 506 cascading, 956 cell-mapping techniques, 259 center manifold, 8, 31, 151, 725-729, 731, 732, 748, 872 chain recurrent set, 224, 230, 406 chaotic advection, 58, 64 chaotic dynamics, 97, 100 chaotic invariant sets, 369 Chapman-Enskog expansion, 538 characteristic equation, 469-471,492, 496 characteristic length, 709, 710, 712 Chua's circuit, 230, 252, 253 circular restricted three body problem, 237 classical solution, 949, 959 clustering, 95, 109 coarsening, 709, 712 coherent structures, 506, 507, 509, 579, 580 compact dissipative, 902 compact semiflow, 841 comparison principle, 843, 1046 compartments, 49
1079
Subject Index
complete blow-up, 740, 741, 751 computer-generated trajectory, 315 concave hull, 690 cone condition, 934 conjugacy, 920, 922 Conley index, 922 homological, 409 - homology, 415 - homotopy, 409, 415 map, 414 pair, 408 - triple, 421 connecting homomorphism, 422 connecting orbit, 400, 954, 955,958 connection matrix, 427 connections between equilibria, 725, 736 conservation laws, 1009, 1012, 1017, 1041, 1042 conservative systems, 1006 conserved functional, 1043 consistency equations, 22 constrained minimization, 1043 continuation, 396, 397 equilibrium of codimension-2, 193 - fold bifurcation, 168 homoclinic, 181, 182 Hopf bifurcation, 168 - travelling waves, 1034 unique, 969 continuation method, 151,233,245,379 continuous -diffusion process, 335 system, 890, 891 -gradient system, 936, 947 -group, 890, 892 semigroup, 890 shadowability, 317 spiking, 100 control parameter, 679, 680 convergence, 847, 848, 853, 865, 866 quasiconvergent, 844, 845 convergent orbit, 937, 953 convolution, 691,704, 705 Coriolis force, 526 correlation dimension, 373 Couette-Taylor problem, 777, 827 critical exponents, 737 Cross-Newell equation, 718 curl, 515, 525 cyclic behavior, 242, 246 -
-
-
-
-
-
degree - 1 map, 427 delays, 12 delta rhythm, 138 dendrite, 49 dense output, 351 depressing synapse, 48 determining modes, 927, 928, 931,964, 973 differential-delay equations, 463-496 diffusion, 6, 16, 709 diffusive mixing, 792 dimension per unit volume, 805 Hausdorff, see Hausdorff dimension dimension topological, 923 dimensionless parameters, 28 Diophantine condition, 526 Dirac measure, 240 discrete dynamical system, 223, 890 discrete semigroup, 890 dispersion relation, 1000, 1002, 1025, 1034 dispersion relative, 78-80, 82 dispersive wave turbulence, 640-645, 668 dissipative wave numbers, 507 distance metrics, 43 domain of attraction, 739, 746 double bordering, 171 double rotor system, 329 doublets, 32 -
-
-
-
d
y
n
a
m
i
c
a
l
-
-
-
-
damped wave equation, 933,958 defect measure, 507, 553,554 defects, 718 defining equations, 375
Eckhaus criterion, 786 eddies, 561,564 eddy diffusivity, 64, 86 effective invariant manifold, 70, 71, 89 effective stochastic dynamics, 646-649 eigenmeasure, 242 eigenvalue -critical, 1021, 1025, 1027, 1031 -isolated, 997, 1008, 1037 - leading, 1025 - double real, 188 -multiplicity, 996-997, 1002, 1008 991, 1014-1017, 1038 -temporal, 987, 996 eigenvalue problem, 987 electrical coupling, 27, 49 electrical synapses, 9, 16 electrically coupled neurons, 6 elliptic equations, 859 energies, 699 energy, 691,702, 707 energy functional, 681,682, 691, 701, 718 energy spectra of turbulence, 553, 559 enstrophy, 521,525,560-562 entropy, 506, 507, 512, 528, 529, 540, 541, 715, 716 -
-
s
p
a
t
i
a
l
,
1080
Subject Index
epileptiform oscillations, 138, 142 equation adjoint variational, 1019, 1025 - homological, 203, 210, 212, 215 - variational, 1019, 1025 equilibria - hyperbolic, 193 - non-hyperbolic, 188, 189 equilibrium -hyperbolic, 157, 177, 180 ergodic, 558 - hypothesis, 528, 552 - measure, 239 -theorem, 506, 567 ergodicity, 558, 559, 568 Euler equation, 505, 506, 509-515, 517-519, 526, 528, 529, 538-540, 549, 554, 555, 581,582, 587-589 - 2d, 583 incompressible, 513 Euler limit, 538, 539, 541 Eulerian stagnation point, 74 Evans function, 997, 1002, 1006, 1046 - definition, 1007 essential spectrum, 1012 -multi-bump pulse, 1027, 1031 - on bounded intervals, 1038 evolution laws, 679 evolution operator, 992 excitable media, 109, 113, 118, 121, 123,679 excitation, 23 excitatory synapse, 15 exhaustion technique, 262 exit set, 408 explicit method, 350 exponential asymptotics, 715 exponential attractor, 506, 507, 509, 565, 573-578 exponential decay, 568 exponential dichotomy, 992, 997-999, 1007, 1014, 1016, 1047, 1048 adjoint equation, 999 exponential separation, 849 extended gradient flow, 787 extended system, 155, 161,165 extremum point, 159, 162
Floquet theory, 1001 flow box theorem, 285 fluid dynamics limits, 537 fluid exchange, 58, 60, 63, 68 fold simple, 153 - definition of, 159 fold curve, 211, 213 forced damped pendulum, 327 FourLegs map, 250 fractal dimension, 565, 574, 924, 926, 951, 964, 974 Fredholm index, 996, 998, 1003, 1004 frequency, 10 frequency regulation, 26 functional differential equation, 463-496, 928, 931 fundamental neighborhood, 224
-
-
-
-
fast threshold modulation (FTM), 7, 42, 116, 138 finite-dimensional combined trajectory, 941 finite-time transport, 70, 72, 74 FitzHugh-Nagumo equation, 703,989, 1027, 1032 fixed point, 463-466, 484, 485, 491,492, 494 fixed point index, 463, 484-488, 492, 494 Floquet bundles, 856 Floquet exponent, 1001, 1019, 1021
-
-
GAIO, 258 Galerkin method, 241,243, 244 gamma rhythm, 31 gap condition, 934, 935, 951 gap junctions, 9 gap lemma, 1016 generic, 917 Gevrey regularity, 933, 973 Gibbs measure, 587, 589 Gierer-Meinhardt system, 715 Ginzburg-Landau -energy, 710, 712 -equation 712, 786, 970, 990, 1009, 1041 --derivation of, 767 - - complex, 795, 798 - - cubic-quintic, 774 -formalism, 762, 765, 809 manifold, 820 operator, 716 - vortices, 788 glitch, 321 gradient flow, 680-682, 684, 701,706, 716, 718 gradient structure, 865, 866 gradient system, 889, 936, 942, 953 gradient-like, 864, 874 granular materials, 700 GRAPE, 263 graph transform, 368 Grashoff number, 558, 568-570, 576 Green's function, 704, 705 group velocity, 766, 1000, 1002 -
-
"half-center" oscillators, 46 Hamilton-Jacobi equation, 736, 737 Hamiltonian, 588, 589
Subject Index Hamiltonian PDEs, 1009, 1011, 1042 Hamiltonian system, 213,214, 237, 505,507, 527, 528, 588, 589 hard sphere model, 529 Hausdorff dimension, 565,572, 923,941, 951 Hausdorff distance, 889 Hausdorff measure, 521 heat equation, 839, 948 Hdnon attractor, 229 Hdnon map, 228, 248, 252, 253,256, 257 Hermite polynomial, 727, 738 heteroclinic, 940, 1031 heterogeneity, 24 hierarchy, 505,507, 510, 527-529, 537, 553 hippocampal slice, 31 Hocking-Stewartson equation, 776 Hodgkin-Huxley model, 6, 96, 139 "hold-and-fire" systems, 31 homoclinic bifurcation, 103 intersection, 318 -orbit, 16, 97, 98, 104, 107, 613-618, 621-631 -points, 274, 288 - solution, 790, 795 tangency, 318 homoclinic orbit, 179, 190, 191, 201, 213, 216, 1020, 1023 -transverse, 870, 871 homotopic, 408 homotopy class, 408 homotopy continuation, 323 Hopf bifurcation, 6, 7, 16, 98, 103, 104, 158, 159, 163, 167, 175, 182, 184, 186, 189, 201,383 Hopf curve, 213 Hopf equation, 567 horseshoe, 413, 419, 441 hydrodynamic limit, 538 hyperbolic, 318 attractor, 244 point, 938, 951 point, 938 - matrix, 992 -normally, 365, 865 - set, 227 - structure, 353 -
-
-
-
-
e
q
-
f
i
u
x
i
e
l
i
b
r
i
u
m
d
ignition variables, 731 implicit methods, 350 inertial dynamical system, 565 inertial form, 934 inertial manifold, 507, 509, 573-575, 934, 935, 955,967 inertial range, 507, 560, 563 infinite delay, 928
1081
infinite horizon variational problems, 701 infinitesimal phase response curve, 9 infinitesimal PRC, 41 inheritable, 450 inhibition, 23 inhibitory coupling, 16 instability absolute vs. convective, 1005 lntegrable systems, 1008, 1012 integrate-and-fire model, 6, 20 integrator, 267 lntegrodifferential equation, 705 interaction kernel, 2 l interaction of pulses, 1018, 1033 interfaces, 712, 713,715 lntermittency, 507 internal energy, 715 internal layers, 712 intersection test, 259, 260 interval arithmetic, 448 lnvariance -principle of LaSalle, 937 translation, 988-989, l018, 1028 invariant, 89 l, 892, 895 invariant cylinder, 50 invariant manifold, 58, 59, 71, 72, 233, 574, 868, 870, 874, 875 -center, 8, 31, 151, 183-185, 200-206, 210, 725729, 73 l, 732, 748, 872 center-stable, 178 center-unstable, 178 - inertial, 507, 509, 573-575, 824, 934, 935, 955, 967 spatial center, 811 - stable, 227, 318, 366, 921,936 -stable, theorem, 227 strong unstable, 190 -unstable, 227, 245, 318, 366, 679, 713,714, 921, 939 invariant, positively, 408, 891,934 invariant measure, 238-240, 244, 246, 247, 507 -absolutely continuous, 245,256 - attractors, 557 -natural, 239, 257 invariant set, 224, 245, 353, 395 - maximal compact, 903 lnvariant tori, 365 lnvariantly connected, 891,895, 899 inverse scattering theory, 1008 ionic currents, 38 lrreversibility, 505 isolated invariant set, 396 isolating block, 408 -
-
-
-
-
-
1082
Subject Index
isolating neighborhood, 396 singular, 445 isotropy hypothesis, 559
-
J-stable, 922 Joyce-Montgomery equation, 584, 586 Jupiter red spot, 580 k-e model, 507, 509, 550-552 KAM theory, 365 kinetics of diffusion, 709 Kirchg/issner reduction, 810 knotted flow, 232 Knudsen and Reynold number, 538 Knudsen number, 510, 511, 528, 529, 537, 545, 549, 550, 553 Kolmogorov dissipation wave number, 563 exponent, 528 - flow, 775 inertial range, 563 - Kraichnan wave, 556, 562, 563,568 - scaling law, 563,570 - spectrum, 563 - wave number, 563,564 Kolmogorov-Petrovsky-Piskunov (KPP) equation, 1042 Korteweg-de Vries equation, 989, 1008, 1013 Kraichnan inertial range, 563 - scenario, 561 - spectrum, 563 Krein-Rutman theorem, 486, 487 Kullback entropy, 585 Kuramoto-Sivashinsky equation, 774, 970 (Kuratowski)-measure of noncompactness, 910 -
-
-
-
L l-connection, 743,750, 751,753,754 L 1-continuation, 741,755 L 1-solution, 739-741,747, 751,754, 755 Lagrange multiplier, 513 Lagrangian coordinates, 513, 516 Lagrangian transport, 58, 64, 70 Landau equation, 770 lap number, 954 Leray, 566 Leray reduction, 415 Leray-Schauder degree, 485, 487, 488 limit capacity, 924 linear stability, 689 Lin's method, 1022, 1034 lobe dynamics, 60, 68 localized patterns, 700 locally compact dissipative, 902
LOCBIF, 36O logistic map, 245,256 long-range synchronization, 31, 35 Lorenz system, 235, 245, 246, 558 Lyapunov coefficient 184, 186, 199 - second, 201,206 Lyapunov dimension, 576 Lyapunov exponents, 79, 331,571,576, 849 Lyapunov functional, 50, 679, 682, 716, 861,864, 889, 936, 941, Lyapunov number, 571,576 Lyapunov-Schmidt reduction, 714 - f i r s t ,
Mach number, 509, 511,538, 545, 553 Marl6 projection, 577, 578 Mafir's theorem, 577 manifold, see also invariant manifold Ginzburg-Landau, 820 manifold approach, 714 marginals, 589 Markov partitions, 371 matched asymptotic expansions, 726, 733 materials science, 701, 712 Maxwellian, 534, 535, 538, 539-541, 545, 548, 550, 553 mean field equation, 584 mean free path, 528 measure - ergodic, 239 - invariant, 239 - natural, 372 - Sinai-Ruelle-Bowen (SRB), 238, 239, 244, 257, 372 Melnikov integral, 1020 - method, 370 - theory, 1023 metastable patterns, 680, 708 metric, Euclidean, 115 metric, time, 116 mild solution, 890, 959 Miller-Robert equation, 586 minimizer, 681,684, 691,695, 698, 699, 702 680, 684-688, 690, 691, 694, 698, 699, 706-708, 716 minimizing sequence, 706 modeling, 342 models of turbulence, 505 modes of growth, 709 modulation, 717 ansatz, 768 monodromy matrix, 157, 162 monotone, strongly, 844
-
- g l o b a l ,
-
Subject Index monotone mapping, 844 monotone (order-preserving) PDEs, 1045 monotone systems, 843, 989, 1045, 1046 Monte-Carlo simulations, 711 Morris-Lecar equations, 42, 122 Morse decomposition, 403, 855,940 Morse index, 416, 749, 993,998, 1003, 1007, 1032, 1037 Morse sets, 403 Morse-Smale map, 920, 922 Morse-Smale system, 951,954, 965,967 moving hyperplanes, 860 multi-pulse solutions, 795 multi-step method, 350 multiple shooting algorithm, 360 multiplier Floquet, 157, 161 simple, 167 trivial, 157 multivalued map, 448 -
-
-
-
1083
numerical integration, 348 - one-step method, 350 operator adjoint, 998 - Fredholm, 996 - null space, 990 - range, 990 -sectorial, 840, 1040 -self-adjoint, 727, 731,735 orbit, 937 heteroclinic, 193,216, 1031 heteroclinic orbit, 189 - homoclinic, 179, 190, 191, 201, 213, 216, 1020, 1023 - central, 192 - codimension-1,214 - - complete, 892 - non-central, 181, 192 - non-central saddle-node, 192 - regular, 177, 179-181 - - saddle-node, 188 Shilnikov, 216 - - to a saddle-focus, 1030 - - to a saddle-node, 178, 181 - to non-central saddle-node, 178 n-homoclinic, 187 negative, 892 - periodic, 358, 1022 - existence, 440 point, 921 solution, 489, 496 positive, 891 -pseudo-orbit, 354, 821 - pseudoperiodic, 224 order, admissible, 403 order, flow defined, 404 order preserving, 843 oscillations, synchronized, 5 oscillatory, 5, 108, 113, 117, 121, 123 -
-
-
-
-
-
-
-
Nagumo equations, 438 Navier-Stokes and Euler equations, 509, 513, 527 Navier-Stokes equation, 505-507, 509-512, 518, 519, 521,523, 526, 527, 538, 541,543,545, 547, 549-555, 557, 558, 563, 565, 566, 574, 970 - compressible, 544 - incompressible, 545 Navier-Stokes limit, 541 negative temperature, 506 Nemitskii operator, 840 neurons, "type 1", 24 neurons, "type 2", 24 Newell criterion, 786 Newell-Whitehead equation, 775 Newton-Keller criterion, 681 noise-sustained structures, 338 nonconvergent trajectories, 875 nonhyperbolic systems, 320 nonwandering set, 353, 921 normal form, 7, 18, 151, 182, 184, 200, 205, 209, 214, 216, 367 - coefficient, 204, 206, 215 of codimension-2, 200 - simple fold, 183 truncated, 211 normalization technique, 203, 205 numerical computation - of PDE-spectra, 1035 numerical continuation - of travelling waves, 1034 numerical evaluations of brittleness, 327 -
-
e
q
u
i
l
i
b
r
i
u
m
-
-
-
-
-
-
-
p
e
r
i
o
d
i
c
-
p
e
r
i
o
d
i
c
-
pancreatic beta cells, 96, 100 parabolic equation, 837, 852, 859, 868, 948, 952 paroxysmal discharges, 138 pattern, 686, 693, 707, 716, 717 - basic periodic, 761 761,820 patterning, 712 periodic process, 914 Perron-Frobenius operator, 238, 241, 242, 245, 248 -discretized, 243,247, 249, 253,255,262 phase condition, 156, 167, 180, 191, 214
-
-
m
o
d
u
l
a
t
e
d
,
1084
Subject Index
evolution, 716 - l a g , 10 parameter, 715 - separation, 708 slip, 791 phase-difference equations, 7 phase-field equations, 716 phase-field models, 715 phase-locked oscillations, 5 phase-response curve (PRC), 31 "phasic" regime, 25 Poincar6 continuation, 156 Poincar6-Bendixson theorem, 854 Poincar6 map, 6, 163, 164, 175, 275 Poincar6 section, 438 point dissipative, 887, 902, 904 pointed space, 407 pointwise - dimension, 373 - estimates, 1042 - shadowing distance, 333 Poiseuille flow, 779 Poiseuille problem, 827 Poisson bracket, 513 population dynamics, 837 post-inhibitory rebound, 47, 119 potential vorticity, 64, 80, 85, 87 power spectrum, 569 Prandtl number, 511 product - bi, 384 bialternate, 160, 162, 169, 186, 198 - definition of, 152 propagation of chaos, 534 -
-
-
-
-
random averages, 552 random fluctuations, 556 random perturbation, small, 240, 241,244 Rayleigh number, 700 Rayleigh-Brnard problem, 776, 827 reaction-diffusion systems, 868, 948, 988, 1006, 1041 -singularly perturbed, 1009, 1017, 1045 realization of vector fields, 868, 873-875 recurrent set, 224 reduction techniques, 6 refractory period, relative, 33 regularity, 509, 927 repeller, 399 representable numbers, 448 representable set, 449 representation of, 449 residual, 917 resolvent, 998
resonance condition, 367 resonant periodic orbits, 298 resonant saddle, 188 retarded functional differential equation, 890, 945 return map, 360 reversible systems, 1019, 1026, 1029, 1032 Reynold stress tensor, 507 Reynolds number, 505, 509, 511, 518-520, 538, 545, 550, 553, 558, 564, 570 Reynolds tensor, 507, 551,553, 554, 556 Riemann-Hilbert problem, 651-660, 668 rolls, 717 rotating waves, 958 Rouchr's theorem, 470, 471,474, 476, 483 roughness theorem, 993 Runge-Kutta method, 348 saddle, neutral, 175, 186, 188 saddle-focus, 188 - equilibrium, 1030 saddle-node, 181 - bifurcation, 383 SBR measure, see measure scaling parameters, 509 Schrrdinger equation, nonlinear, 774, 789, 990, 1009, 1012, 1017, 1032 Schur factorization, 181 semicontinuity -lower, 916, 942, 943 -upper, 806, 822, 916 semi-classical limit, 660--668 semiflow, 505, 841 semilinear heat equation, 726 sensitive dependence on initial conditions, 315 separatrix, 269, 287 set - almost invariant, 249, 250 -invariant, 224, 245, 353,395 stable, 178 unstable, 178 set-wise image, 260 shadowing, 317, 354, 820 - distance, 324 lemma, 318 -time, 332, 336 shift dynamics, 443 shift equivalent, 414, 415 shooting method, simple, 360 shooting permutation, 956, 957 sideband instability, 782 - vector, 783 similarity variables, 726, 730 -
-
-
-
Subject Index
singular index pair, 446 skew-product flow, 915 SLEP method, 1046 slow motion, 680, 713,714 slowly oscillating periodic solution (SOP), 463, 490, 491,494-496 small denominator, 526 Sobolev spaces uniformly local, 784 solenoid, 358 solution, see also orbit - branch, 152, 153 heteroclinic, 177 homoclinic, 177 - periodic - - hyperbolic, 157, 201 152, 155, 165 SOP solution, 463,490, 491,494-496 spatial - average, 552 - dynamics, 1046-1048 eigenvalue, 1014 -pattern, 679, 703 spatially unstable systems, 338 spatially-periodic wave trains, 1021 spatiotemporal chaos, 631-638 spectral - assumption, 766 -gap, 995, 1014, 1038 stability, 1044 spectrum, 996 -absolute, 1032, 1038, 1039 -essential, 996, 998, 1012, 1018, 1021, 1037 -point, 996-998, 1007, 1018, 1037, 1039 spike, 804 spike adding, 100, 107 spike response method, 6, 20 spike shape, 27 spike-frequency adaptation, 10 spike-time maps, 31 spindle rhythm, 138 spinodal decomposition, 708, 709, 715 spiral waves, 797 squeezing property, 575 SRB measure, see measure stability, 509, 512, 679 - fronts, 1002, 1005 rest state, 1000 analysis, 681,709 -linear criterion, 680, 686, 689, 690 -multi-bump pulses, 1017, 1027, 1031, 1032, 1044 - nonlinear, 1039, 1043 - of waves, 985, 1039 - pulses, 1004 - spectral, 987, 1040 -
-
- r e g u l a r ,
-
-
- h o m o g e n e o u s
- l i n e a r
1085
transition to instability, 1026 wave train, 100 l, 1021, 1048 stable, 900, 901 stable uniformly asymptotically, 901 standard map, 269, 295 star-shaped, 451 state dependent delays, 467, 494 stationary statistical solutions, 566 statistically sharp, 590 stiff integrators, 350 stochastic stability - of the spectrum, 252 stochastic transition function, 240 straddle algorithm, 368 straddling, 70, 77, 89 streamfunction, 59, 64 Strichartz inequalities, 963,972 strongly connected component, 231 structurally stable, 954 Sturm-Liouville properties, 954 subdivision algorithm, 225 subdivision algorithm, adaptive, 254 subharmonic solutions, 850 subshift, 369 succession map, 275 summation property, 412 support of solutions, 987 suppressed solution, 109, 124 Swift-Hohenberg equation, 680, 700, 702, 824, 1041 symmetry, 859-863 symplectic integrators, 352 synapse, 9, 111, 117, 120, 131 synaptic coupling, 109 - escape, 47 - kernel, 21 release, 47 reversal potential, 111, 126 synchronized oscillations, 5 synchronous solution, 109
-
-
-
-
-
Taylor series method, 351 temporal chaos, 618-631 test brittleness, 325 test function, 158, 160, 162-165, 169, 182, 185188, 192 codimension- 1 bifurcations of maps, 161 - Hopf bifurcation, 160 inclination-flip, 191 homoclinic orbit, 192 orbit-flip, 190, 191 -well-defined, 161, 162, 187, 188, 191-193, 196, 197 -
-
- n o n - c e n t r a l
-
1086 thalamic reticular (RE), 139 thalamocortical relay (TC), 139 thalamus, 96, 129 thermal diffusivity, 511,545 Thom-Boardman stratification, 377 threshold results, 685 time average, 372 time delay, 372 time metric, 7, 44 time regularity, 927 time scales, 6 time step, 348 time t map, 348 "tonic" regime, 24 topological equivalence, 915, 920, 922, 957 trajectory, 348, see also orbit, solution trajectory, true, 317 transition density function, 241 transition matrix, singular, 433 transition matrix, topological, 433 transitive, 871 translation eigenvalue, 1028 transverse intersection, 59, 68 travelling - fronts, 985 -multi-bump pulses, 1028, 1032 - on cylindrical domains, 1046 - pulses, 985 wave trains, 985, 1017 - waves, 705, 985 turbulence, 507, 509, 550, 553, 563,580 - modelling, 505,528, 550 statistical, 551,555 turbulent, 505, 506, 554, 558, 580 diffusion, 551 - energy, 551 - energy spectra, 580 - intermittencies, 574 - spectra, 506, 507, 509, 556, 568 Turing patterns, 1001 two-cycle, 248, 253 -
-
-
Ulam's method, 238 uniformly ultimately bounded, 888 upper triangular, 427
Subject Index variable time step, 350 variational equation adjoint, 190 "virtual" delay, 46 viscosity, 71, 85, 88, 511,513, 520, 525, 545, 554, 558 voltage-gated conductance equations, 5 vortex, 72, 73, 77, 80 vorticity, 509, 510, 513, 515, 523, 524, 550, 580, 581,583
-
wandering point, 353 wave
- modulated, 1047 plane, 784 - rotating, 1047 spiral, 1006, 1048 - travelling, 705, 985 wave train, 1048 Wa2ewski Property, 397 Wa2ewski Theorem, 232 weak interaction of pulses, 1033 weak solution, 718 weak turbulence (see dispersive wave turbulence), 640 weakly coupled oscillators, 6 weakly damped KdV equation, 974 weakly damped Schrrdinger equation, 933, 971 weakly nonlinear analysis, 682, 700, 716 weakly nonlinear stability theory, 679 wedge product, 186 weight - exponential, 1005, 1006, 1015, 1041 polynomial, 1041 weighted energy estimate, 801 - norm, 784 Wigner transform, 507, 509, 553 -
-
-
-
Young measure, 585, 586 Zakharov equations, 974 zero, regular, 160, 163, 165, 185-187 definition of, 158 zero number, 745, 852, 853, 858, 862, 954, 955, 958 -