This content was uploaded by our users and we assume good faith they have the permission to share this book. If you own the copyright to this book and it is wrongfully on our website, we offer a simple DMCA procedure to remove your content from our site. Start by pressing the button below!
denotes the vibration frequency; \ + (m-\)p ( m = l,2,...,2n ) is the ordinal number of the subsystem with mass M + AM and the loads F, (j = \,2,...,2np) must satisfy the symmetric condition, i.e., F2M-J=-F]
J = 2X.,N
(2.2.2a)
Fj M A k s'x
- » Xj
M+AM
M+AM
k 2
p+1
l+(n-l)p
symmetric l i n e M M+AM
I
M+AM
-Fj
M M+AM
k
2
P
7
np np+1
Original system
Fj k
s,
Y/
l+2p
(a)
M+AM
M
k
M+AM
I
p+!
j
l+(n-l)p
np
i+np 4np
l+(n+l)p
N+2-j N=2np
(b) Figure 2.2.1
2np l+2np xi+2np=xi
Equivalent system
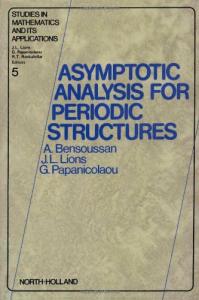
Bi-periodic mass spring system with fixed extreme ends
Bi-periodic Mass-Spring Systems
F,=Fw+1=0
47
(2.2.2b)
where N = np and Fj(j = 2,3,...,N) denote the real loads acting on the original system. The term AMo 2 x. acts as a kind of loading. The expressions on the left sides of Eqs. (2.2.1a) and (2.2.1b) possess cyclic periodicity. We can now apply the U-transformation to Eq. (2.2.1). Let xj=-^=Yei(J-^qm V2JV tTi
j=l,2,...,2N
(2.2..3a)
m = l,2,...,2N
(2.2.3b)
or 1 1
2JV
1 = -fL=ye-'u-l)m"x,.
V2JV^ where y/ = — , i = v - 1 and 2N denotes the total number of subsystems. 1 2N Premultiplying Eq. (2.2.1) by - = = Y e~^-\^w ^ r e s u l t s
m
V2iv^r {2k-Ma>2)qm-2kzosm¥qm=f°m+fm
m =l,2,...,2N
(2.2.4)
where
V2N
"
/ =
* -p = E e ~' 0 ~ 1 ) m r j p ; V2./V , =!
Introducing Eq. (2.2.2) into Eq. (2.2.5b) gives
(2 2 5b)
--
48
Exact Analysis of Bi-periodic Structures
2i N / ; = — ^ X s i n O - - \)m y,Fj \2N j=2
(2.2.5c)
As a result / ; = 0 and f;N=0
(2.2.5d)
From Eq. (2.2.4), gm can be expressed as qn=ql+q'a
(2-2.6a)
?• = f°/(2k-Mw2
-Ikcosmy/)
(2.2.6b)
9™ =fm/(2k-Mco2
-2kcosmy/)
(2.2.6c)
Substituting Eqs. (2.2.5), (2.2.6) and j = l + (s-l)p (2.2.3a), we have
into the U-transformation
In
X s =AMa> 2 £ & „ * „ + * ;
5 = l,2,...,2n
(2.2.7)
where Xs 1 ;0„ =
Xs =x\+u-\)p
=XI+(S-\)P>
(2.2.8)
2N
r l (j u) p,, 2 ^[e' - '" '/(2fc-M)
r = 1,2,...,«-1
(2.2.14a)
50
Exact Analysis of Bi-periodic Structures
Q^=Qr
and
Q„=Q2n=0
(2.2.14b)
where 1 ar(co) = I-AMeo2—Y
p
(2k-Mw2-2kcos[r
+ (u-1)2^1//)-'
(2.2.15)
PTt Making a comparison between Eqs. (2.2.5a) and (2.2.11b) gives AMo2 fr+(u-l)ln=—^Qr
T = 1,2
fp
2»
«=l,2,...,/7
(2.2.16)
Finally substituting Eq. (2.2.6) into the U-transformation (2.2.3a), the solution for x, can be expressed as XJ=XJ+X'J 2N
1
(2.2.17a)
r
i
x°j = -jL=^[eiU-i)m"f°/(2k-Mca2
-2kcosmy/)\
(2.2.17b)
and x'j is defined in Eqs. (2.2.5c), (2.2.6c) and (2.2.10). 2.2.1a
Natural Vibration Example
Letting Fj=0
(j = \,2,...,2N ) as a result x\, = 0 and br = 0 ( r = 1,2,...,2w ),
the independent frequency equation can be obtained from Eqs. (2.2.14) and (2.2.15) as 1
p
l-AMco2—Y(2K-Mco2-2kcos[r
+ (u-l)2n]y/yl
=0
PTt r = \,2,...,n-\
(2.2.18)
if Xs (s = 1,2,...,2ri) are not identically equal to zero. Consider the case of Xs(s = 1,2,...,2n) vanishing. As a result the terms on the
Bi-periodic Mass-Spring Systems
51
right side of Eq. (2.2.4) are equal to zero. Corresponding frequency equation can be obtained as my/)-Mo)2
2k(\-cos
=0
/n = «,2«,...,(/?-l)n
(2.2.19)
where m denotes the half wave number of the mode for the original system. Taking a specific example as shown in Fig. 2.2.2.
Pe
icot
->
kM k M ^1
2
2M 4
Figure 2.2.2
M
k
5
6
K/ 7^
Bi-periodic mass spring system with fixed ends, p=3 and n=2
The parameters are n = 2,
p =3
AM=M
(2.2.20a)
leading to N=6
Y=^ o
^
=
(2.2.20b)
T/
Substituting Eq. (2.2.20) into Eq. (2.2.18) yields 2
3
Mco 2 1 l_i^y(2A;-Mft> -2A:cos[r + 4( M -l)]-)=0, 3 6
Tt
A nondimensional frequency parameter may be defined as
r=\
(2.2.21)
52
Exact Analysis of Bi-periodic Structures
flo-^r1
(2 2 22)
- '
k The frequency equation (2.2.21) can be rewritten, in term of fi0 as Q^-5Q^+6Q0-1 = 0
(2.2.23a)
The roots of Eq. (2.2.23a) are Q 0 =0.198062264, 1.55495813,3.24697960
(2.2.23b)
Noting Eq. (2.2.20), the other frequency equation (2.2.19) becomes 2k(\ - cos w - ) - Mco1 = 0 6
m = 2,4
(2.2.24a)
That leads to Q 0 =2(1-cosm—) 6
/n = 2,4
(2.2.24b)
The two roots are Q 0 = 1 (m = 2 ) ,
3 (m = 4)
(2.2.24c)
There are five natural frequencies altogether. The total number of the natural frequencies is in agreement with the number of degrees of freedom for the original system. Consider now the natural modes. Corresponding to the frequency equation (2.2.21) with Q 0 shown in Eq. (2.2.23b) the modes can be expressed in terms of the generalized displacements, as 2, " 0 ,
03=
ft
(2.2.25)
with the other Qr vanishing. Introducing Eqs. (2.2.20) and (2.2.25) into (2.2.11a) and letting Xx = 0 yields
Bi-periodic Mass-Spring Systems
Qx = imaginary number = -i Xj = sinC/ -1) Y
Qi=Qx= i
j = 12,3,4
53
(2.2.26a) (2.2.26b)
neglecting an arbitrary constant factor in the expression of the mode. Inserting Eqs. (2.2.20a) and (2.2.26a) into Eq. (2.2.16) gives Mco2 1 f\ =/5 =h = J^
(2.2.27a)
Ma1 f?=fi=ti=Lil£-i
(2.2.27b)
fi=f:=--fn=0
(2.2.27c)
Substituting Eqs. (2.2.20) and (2.2.27) into Eq. (2.2.17b), the natural mode can be obtained as .A-i — ^ - i ~~ \J }
_ ..o _
" 7 — J\r*i — V7
o
* 2 ~ * 2 ~ ( 2 - a o ) [ ( 2 - Q 0 ) 2 - -3] 0
^ 0
(2-Q0)2-3
.0 — At —
(2.2.28b)
(2.2.28c)
(2.2.28d)
* 4 = X° = 1
X
Q 0 [(2-Q 0 ) 2 -l]
(2.2.37b)
2V3(Qo-5Qo+6Qo-1) /m° = 0
m = 2,4,...,12
(2.2.37c)
Bi-periodic Mass-Spring Systems
57
Finally inserting Eq. (2.2.37) (2.2.17b) (2.2.33) and (2.2.31a) into Eq. (2.2.17a), the frequency response functions for the amplitudes of displacements can be found as
*,=*, = 0 1
P X
6
x2
=
x
= *5
i
(2.2.38a)
* 4 = '
+ 6Q 0 -1
(2.2.38b)
2-Q 0 P Ik Ql--5Q20 + 6Q 0 -1
(2.2.38c)
2k
Q
3 0
•-5QJ;
P [(2-- " o ) 2 - -1] i t n 3 _
i
(2.2.38d)
When Q 0 approaches zero the solution Xj shown in Eq. (2.2.38) will approach the static displacement, namely x, = xn = 0,
x,=x5=
P —, k
P x2 =x6 = — Ik
(2.2.39a)
3P xA=— 2k
(2.2.39b)
Obviously the resonance frequencies are the roots of Eq. (2.2.23a). When Q 0 approaches each value shown in Eq. (2.2.23b), the amplitudes of displacement will approach infinity. It can be shown that, when each amplitude of displacement approaches a finite value at one natural frequency, the harmonic force is acting at a nodal point of the corresponding mode. 2.2.2
Bi-periodic Mass-Spring Systems with Free Extreme Ends
Consider a bi-periodic mass-spring system with free extreme ends and 2np (p=2d+l) particles altogether as shown in Fig. 2.2.3(a) where M, AM , k, xJ7 Fj and N have the same meanings as those in Fig. 2.2.1 .The bi-periodic system can also be regarded as single periodic. Each subsystem is made up of 2d particles with mass M and one particle having mass M + AM . The bi-periodic system shown in
„Fj M
M k
I
M+AM k
2
d
p=2d+l
Xj
M+AM
M
d+l+(n-l)p
np
k
d+1 d+2
J 3d+l d+l+p
(a) Original system
center line | p=2d+l
Fj
•*• X j
._ k
k _
M+AM _
k
M | M I
M+AM k
F2N+l-j=Fj M+AM —*"*J - , k |
(b) Equivalent system Figure 2.2.3 Bi-periodic mass spring system withfreeextreme ends
M
2N-2np s . a' M k k
Bi-periodic Mass-Spring Systems
59
Fig. 2.2.3(a) has n subsystems and np (p=2d+\) mass points altogether. In order to form an equivalent system having cyclic bi-periodicity, it is necessary to extend the original system by its symmetrical image and apply antisymmetric loading on the corresponding extended particles. In such an extended system the vibration displacements will be antisymmetric about the center line if the initial displacements and velocities are also antisymmetric. For each pair of symmetric particles, both longitudinal displacements are the same. As a result xnp = xnp+x and x2ap = xi which indicate that the connecting spring between both particles np and np+l dose not transmit any force and both extreme ends of the extended system can be imaginarily connected by the same spring as the other one, i.e., the 2n/?-th particle can be regarded as the preceding one of the first particle. Therefore the extended system shown in Fig. 2.2.3 (b) can be regarded as cyclic bi-periodic. The harmonic vibration equation takes the form as (2k - Ma)2)Xj - k(xJ+l + xH) = Fj+ AMco2Xj j = d + l,d + l + p,...,d +1 + (2n - \)p
(2.2.40a)
(2k - Mco2 )xj - k(xJ+1 + Xj_x) = Fj j*d
+ \,d + \ + p,...,d + \ + (2n-\)p
and j = l,2,...,2N(= 2np) (2.2.406)
where 2N denotes the total number of particles for the equivalent system, p=2d+l, Xj, Fj denote the amplitudes of the longitudinal displacement and loading for the 7-th particles and a denotes the frequency of the external excitations. For the equivalent system, the loads must satisfy the antisymmetric condition, i.e., F2N«.j=Fj,
y=l,2,...,«p
(2.2.41)
where 7V=«p and F. (j=l,2,...,np) are real loads acting on the original system . Applying the U transformation (2.2.3) to Eq. (2.2.40) we have (2k-Ma)2-2kcosmW)qm=f°+f:, where
m=\,2,...,2N
(2.2.42)
60
Exact Analysis of Bi-periodic Structures
>ly 4IN
tf 2W
1
r (y 1,m /:=-r=Z< ^ 2 W % '' ~
(2 2 44a)
--
with y/ = rv/N and /' = v - 1 . Introducing Eq. (2.2.41) into Eq. (2.2.44a) yields 7
N
i-m
1
1
f' = - = e "" V cost/ — ) » V Ft
(2.2.44b)
/; a 0
(2.2.44c)
That leads to
The solution for r'Qr+br
r=l,2,...,2n
(2.2.50)
where cp = K]YI and br=J=Ye-«°-l)r*X's
(2.2.51a)
V2« J=, X's must satisfy the antisymmetric condition, i.e., X'2n+l_s = X's (s=l,2,...,n). As a result Z>r =-^=e'2riPYcos(s V2« Tf
)r
b
2n-r=K
Introducing Eqs. (2.2.51c) and (2.2.48) into Eq. (2.2.50) gives Qr=-%— ar(d))
and
r = l,2,...,«-l,2«
(2.2.52a)
62
Exact Analysis of Bi-periodic Structures
2 „ = 0 , Q2„_r=Qr
r = l,2,...,»-l
(2.2.52b)
where ar(co) = 1 - AMa2 — V ( 2 k -Mco2 -2kcos[r + {u-l)2n]^)_1
(2.2.53)
Making a comparison between Eqs. (2.2.43) and (2.2.11b) and noting the definition of Xs shown in Eq. (2.2.47) yields
fX-mn^^-e-'^-^Qr y/P 2.2.2a
r=l,2,...,2n u=l,2,...,p
(2.2.54)
Natural Vibration Example
Let Fj = 0 (j=l,2,...,2N). That leads to x'j=0
{j=\,2,...,2N) and br = 0
(r=l,2,...,2«). If Xs (5=1,2,.,.2n) are not identically equal to zero, the frequency equation can be expressed as ar (cci) = 0, namely 2\{2k-Ma>2 PTt
1-AMOJ2 —
-2kcos[r + (u-\)2n]y/Yl
r = 1,2,..., n-1,2/1
=0 (2.2.55)
If Xs (5=1,2,...,2n) are identically equal to zero the frequency equation can be obtained from Eq. (2.2.42) with /ra° = f'm = 0 as 2k-M(02
-2kcosmy/
=0
m=n,3n,5n,...,(p-2)n
(2.2.56)
It is interesting to note that Eqs. (2.2.55) and (2.2.56) formally are the same as Eqs. (2.2.18) and (2.2.19) respectively, but the parameters r and m take different values in corresponding Eqs. (2.2.55) and (2.2.18) and Eqs. (2.2.56) and (2.2.19) respectively. Consider the system with the following parameters d=\,
« = 2,
AM=M
(2.2.57a)
Bi-periodic Mass-Spring Systems
63
That leads to p = 3,
JV = 6 ,
V =- ,
(2.2.57b)
M
k
1 Figure 2.2.4
^M 2
M
k
3
4
2|M 5
M
6
Bi-periodic mass spring system with free extreme ends, p=3 and n=2
Introducing Eq. (2.2.57) into Eq. (2.2.55) yields M
1
2
3
—Y(2it-MfiJ 2 -2A:cos[r + 4(M-l)]—)"* = 0
3
6
Tt
When r = 1, the roots for Q 0 (=
r = l,4
(2.2.58)
) of Eq. (2.2.58) are the same as those k
shown in Eq. (2.2.23b), i.e., n0 = 0.198062264,
1.55495813,
3.24697960
(2.2.59a)
When r = 4, the root for Q n is n0=2 Inserting Eq. (2.2.57) into Eq. (2.2.56) gives
(2.2.59b)
64
Exact Analysis of Bi-periodic Structures
2k - Ma2-2k
cosm-
=0
m=2
(2.2.60a)
That leads to Q0=l
(2.2.60b)
The corresponding mode possesses the property of x2 = x5 = 0. Let us now pay attention to the natural modes. Firstly consider the modes with x2 and xs non-vanishing. Corresponding to the natural frequencies shown in Eq. (2.2.59a), the mode, in terms of the generalized displacement, is e,*0,
03 = 6 i .
22=04=0
(2.2.61)
Because of the antisymmetry of displacement for the equivalent system, namely X2n+l_s = Xs (s = 1,2,...,n ), Eq. (2.2.11b) can be rewritten as
Qr = - r ^ Z «>s(* ~hr
(2.2.103)
The final results for JC. can be found by introducing Eqs. (2.2.103), (2.2.90) and (2.2.92) into Eq. (2.2.3a). 2.2.3a
Natural Vibration Example
There are two sets of frequency equations corresponding to Xs non-vanishing
75
76
Exact Analysis of Bi-periodic Structures
and vanishing respectively , namely ar(o}) = l-AMco2 — y^ilk-Ma2 PTt
-2kcos[r + (u-l)(4n
+ 2)]i//yl = 0
r = l,3,5,...,2n-l
(2.2.104)
and Ik - Mco2 - 2k cos m y/ = 0 m = 2n + l,3(2n + l),5(2n + l),...(p - 2)(2n +1)
(2.2.105)
with p = 2d + \ and y/ = n/(2n + \)p . When the specific parameters n, d and AM are given, the natural frequency can be found from Eqs. (2.2.104) and (2.2.105). Taking a specific example as shown in Fig. 2.2.6.
, M M , 2M , M k k k / A A ^ ) - > W 0 ^ V Q A A < )
/'l
Figure 2.2.6
2
3
Bi-periodic mass spring system with fixed and free ends d - n = 1
The parameters are given as d = \,
n=\,
AM=M
(2.2.106a)
That leads to p = 2,
N = 9,
y/ = — ,
N ^
f
*
(4,7)
>->"
{"("-)>
+ JC
i
"^(^)]
(3L29b)
where / ( ° m ) is dependent on the unknown supporting reactions which can be determined by the compatibility condition at supports, i.e., v (1 , (s - 1 ,^ 1) =0,
s = l,2,---,2n
Substituting Eqs. (3.1.21d), (3.1.29a) with j = (s-l)p equation, the restraint condition can be expressed as IX*n+^=0,
(3.1.30) + l into the above
* = l,2,-,2n
(3.1.31)
where
n Hs k
'
1 2N K J_y ei(s-k)pmv _n£_ 2NJ-1 A„ tn—\
1 V
2N
(3.1.32)
in
1
> = -f=ulle'{S~')PmWT-(^,„/(1.m,
-Kl2,mf(2J
(3.1.33)
Here Vs denotes the transverse displacement at the 5-th supported node caused by the external force for the equivalent system without supports. The compatibility equation (3.1.31) is linear simultaneous equations with unknown Pk (k=\,2,---,2n). The coefficients fisk {s,k = \,2,---,2n) of Eq. (3.1.31) possess cyclic periodicity, i.e.,
92
Exact Analysis of Bi-periodic Structures
A , . = A , 2 = - = A„,2„ A , I = A + I , 2 = - " = A . . 2 . - , + I = " - = A-I.2.>
(3.1.34a) 5 = 2,3,-,2«
(3.1.34b)
The independent coefficients are flkx (k =l,2,---,2«). Eq. (3.1.34) indicates the simultaneous equations have the cyclic periodicity. One can now apply the U-transformation to Eq. (3.1.31). Let (3.1.35a)
V2« Tt or 1
2
"
Qr=-f=Ye-iU-^Ps, V2n
r = l,2,.--,2«
(3.1.35b)
"
with cp = n/n = piy . Premultiplying Eq. (3.1.31) by the operator (l/V2n) ] T e'iU'])r,p results in 2n
S A j « * ^ e , + *>r = 0 ,
r = l,2,-,2«
(3.1.36)
where
^=-4=Je-' (s -'^K s
(3.1.37)
By using the U-transformation twice, the governing equation becomes a set of one degree of freedom equations as shown in Eq. (3.1.36). Obviously the solution for Qr ofEq. (3.1.36) is
Qr=-—„
"
,
r = l,2,---,2«
(3.1.38)
Bi-periodic Structures
93
where 1
a
K
J_y IN*-!
•
«t-i)-f _J^L A
m=\
(3.1.39)
m
Consider now the denominator on the right side of Eq. (3.1.38). Note that y
2t In,
eHk-l)(m-r)9 =\
*=1
m = r,r + 2n,---,r + (p-l)2n m *r,r + 2n,---,r + (p-l)2n
I"'
r = l,2,-,2n;
m = \,2,-,2N
(3.1.40)
Substituting Eq. (3.1.39) into Eq. (3.1.38) results in Qr=
-j-p1 V P
-1
"•
k=\
r = l,2,-,2»
(3.1.41)
22,r+(k-\)2n ^r+{k-\)2n
When the specific structure parameters and external loads are given, the generalized supporting reactions can be calculated from Eq. (3.1.41). Then the supporting reactions and the displacements for all nodes can be found from the related formulas given above. Recalling the definitions of both generalized supporting reactions / ( ° m ) and Qr shown in Eqs. (3.1.21d) and (3.1.35b) respectively, there is a simple relation, i.e., /(U*-.)2n)=^em,
m=l,2,-,2n,
k = l,2,-,p
(3.1.42)
Consequently, when we are only interested in the nodal displacements, it is not necessary to find the supporting reactions. In order to explain the procedure of the calculation and verify the exactness of the formulas given in the present section, we need to consider a specific truss with loading.
94
Exact Analysis of Bi-periodic Structures
3.1.2a Example Consider a Warren truss having six substructures and four supports subjected to a concentrated load of magnitude F at the center node as shown in Fig. 3.1.4.
K
(2.2)
(2.3)
(2.4)
(2.5)
(2.6)
Figure 3.1.4 Plane truss with six substructures and four supports subjected to a concentrated force of magnitude F at the center node The structural parameters are given as N = 6,
«=3, p=2, Kt=K2=K,
a = n/Z
(3.1.43a)
which lead to yr = * / 6 ,
F (2 ,.,=0 (
F
M=°>
J*A
j = 1,2,- -,6
(3.1.44a) (3.1.44b)
Introducing Eqs. (3.1.43) and (3.1.44) into Eq. (3.1.22), the generalized loads can be obtained as
Bi-periodic Structures
fM=-J-sm^y-F,
m = l,2,-,12
/(2, M )=0,
m=l,2,-,12
The stiffness coefficients of Eq. (3.1.25) Eq. (3.1.43) into Eq. (3.1.26) as Ku,m=K22tm
(3.1.45a)
(3.1.45b)
can be found by substituting
=—_(ii-7cos—-) oJJm
(3.1.46a)
O
Kn,m -K2hm = - ^ - ( 3 - 2 c o S - ^ ) ( l
+
e-""-)
^ 49 . m;r Dm = 2cos 16 6 Inserting Eqs. (3.1.45) and (3.1.43) into Eq. (3.1.33) gives
Vs =
95
(3.1.46b)
,„ . , , . (3.1.46c)
Ly sin^sinfc-!)^:^*. 3 M ^, 5 2 3 Ara
(3.1.47)
where A"22m and Am can be calculated from Eqs. (3.1.46) and (3.1.28) if m is given. Substituting Eqs. (3.1.46) and (3.1.28) into Eq. (3.1.47) results in Fj=0,
K2=13^,
K3=13^
K
VA=0,
(3.1.48a)
K
K5=-13^,
K6=-13^
(3.1.48b)
Introducing Eqs. (3.1.48) and (3.1.43) into Eq. (3.1.37) yields fc, = -I3V2/—, K
b2=0,
fe3=0
(3.1.49a)
96
Exact Analysis of Bi-periodic Structures
b4=0,
b5 = 13V2i — , K
b6 = 0
(3.1.49b)
Now the generalized supporting reaction can be found by substituting Eqs. (3.1.49), (3.1.46), (3.1.28) and (3.1.43) into Eq. (3.1.41), as Ql=^-iF,
02=O,
04=0,
Q5=-^^iF,
&=0
(3.1.50a)
Q6=0
(3.1.50b)
Inserting Eqs. (3.1.50) and (3.1.43) into the U-transformation (3.1.35a) results in
P=0, 1
39 p=-—F, 2 70
P=0, 4
39 p. = — F , ^ 5 70
39 P.=-—F 3 70
(3.1.51a)
39 p6=—F 6 70
(3.1.51b)
Since we consider the equivalent truss subjected to the antisymmetric loads instead of the original one, the supports at the symmetric line are not subjected to any loads, i.e., P^ = 0 and P„+1 = 0. The real supporting reactions at two extreme ends of the original trass can be found easily by solving the equilibrium equation for 2 the whole truss, i.e., P.=P.= —F . 4 35 Introducing Eq. (3.1.50) and p = 2 into Eq. (3.1.42) gives
/(u, = /«u) = f
tF.
/o, 5 , = / ; „ = ~iF
(3.1.52)
with the other components vanishing. Substituting Eqs. (3.1.45), (3.1.52), (3.1.43), (3.1.46) and (3.1.28) Eq. (3.1.29), the transverse displacements for all nodes can be found as n Vo..,=0,
8 F v(1,2)=-—-,
v ( 1 , 3 ) =0,
353 F v(M)=— _ ,
into
Bi-periodic Structures o V
v0,5)=0,
p
=
v
('.s> -^J7'
('. 7 ) =0
(3.1.53a)
7=1,2,-,6
__j_L
I_F_ v(2,„-
2lK>
v(2>2)-
i 5
v„ „ = v
l
5
K
-2LE-
v(2i3)-35^,
,
(2,5)
(3.1.53b)
-ILL
^,
v(2,4)-35/r
v„ M =
>
97
(3.1.53c)
(2,6)
(2,n-y) =- v (2,;)'
2
{
K
7=l>2,--,6
(3.1.53d)
The results show that the restraint condition Eq. (3.1.30) is satisfied. The longitudinal displacements for all nodes also can be obtained by inserting Eqs. (3.1.24), (3.1.27), (3.1.28), (3.1.46), (3.1.45), (3.1.52) and (3.1.43) into the first and third component equations in Eq. (3.1.9a), i.e., 1
_
_
1
"o.)=-7=Ee''0'"1)'"^o.»)' ^=l^Te'iM)m¥^
(3-1-54)
The results are summarized as follows
_S_F_ "(U) -
7o
A:
'
_V£iL
U
™ - 30 K '
19V3 F
U,,~=
°''
210 K
,
«^6^ = (
' >
M(u
19S F
> _ 210 K ' " ( M )
VJ F 30 A:
»
fi
M
(n7i
' '
=
'
F 70 AT
y = l,2,-,6
V^F_
llV3F
70 AT '
=
9>/3F 70
A:
"
.
in which Af26 = 0 and AT212 = 0 indicate the axial forces vanishing for two additional bars. It can be verified easily that the equilibrium equation for every node is satisfied and then the solution for displacement and axial force is an exact one for the truss shown in Fig. 3.1.4. 3.1.3
Natural Vibration [12]
Consider now the natural vibration of the continuous truss with equidistant supports. The natural vibration equation can be obtained easily from the equilibrium equation (3.1.25) by using the inertia force instead of the static loading. The masses of the bars are assumed to be lumped at the nodes. Two lumped masses denoted by M, and M2 are attached to each of the lower and upper nodes respectively as shown in Fig. 3.1.1. We also assume that the inertia forces in the longitudinal direction may be neglected. By using the co2Mxv(XJ) and = / ( U n > = ^ | iA
/o,2»-r) = /(i,4»-o = — 7 =
(3.1.82a)
(3-1 -82b)
Bi-periodic Structures
107
with the other / ( ° m ) vanishing. Substituting Eqs. (3.1.82), (3.1.75), (3.1.26) and (3.1.64) into Eq. (3.1.67) gives
"(U)
-=-
£
Sin[0-l)m^]—-
7
(3.1.83a)
2
IAl (m)-Qr]
•sJZnK „=r,r+2n
v(2 n - — ? = —
Kl(m)-Qr
-K2(m) K3{m)
sintO' — ) m y/] cos(— m y/)
m)-Qrf-K2(m) (3.1.83b)
where K{(m) and K2(m) have been defined in Eqs. (3.1.77a) and (3.1.77b) and 24(3 - 2 cos m y/) 49 - 32 cos my/
K3(m)-
(3.1.84)
with y/ = nfln . It can be proved that when r is odd, the mode shown in Eq. (3.1.83) is symmetric, i.e., v(12n+2_y) = v(1J) and v(2 2n+1_>) = v ( 2 ; ) ; when r is even, the mode is antisymmetric, i.e., v(12n+2_y) = -v ( M ) and v ( 2 2 „ + w ) = - v ( 2 ; ) . Also, the mode satisfies the constraint condition V
(l.2(,-!)+l) = 0 >
3.1.4
(3.1.85)
5 =1,2,-.11 + 1
Forced Vibration [12]
The continuous trass subjected to transverse harmonic loads acting at the nodes is considered. The forced vibration equation can be expressed as
K^-a2Mx K 2\,m
Klu, K
22,m-