ruSr 4!:
ri,#.qir
',*; ;fi,r
rsBN 0-521-46282-7
CANNBRIDGE UNIYERSITY
PRESS
llll llllll il|l| illilillll ilil
g ...
690 downloads
2372 Views
77MB Size
Report
This content was uploaded by our users and we assume good faith they have the permission to share this book. If you own the copyright to this book and it is wrongfully on our website, we offer a simple DMCA procedure to remove your content from our site. Start by pressing the button below!
Report copyright / DMCA form
ruSr 4!:
ri,#.qir
',*; ;fi,r
rsBN 0-521-46282-7
CANNBRIDGE UNIYERSITY
PRESS
llll llllll il|l| illilillll ilil
g 11790521u462822u
LIBRARV .GALLAGHFR ,JNlv^qlsl' ;\, r)FcA,.;AR Y t/AL(rAH y 4r. *lF ll ;-,q
CANAIJT r-ZNrN+
E,xploration Seismology E
C
O
O
N
N
R.E.SHERIFF Pro.fessor,Geostiences DePartment, University oJ Houston, Houslon,Texas
L. P.GELDART Former Coortlinator, Canudian International Development Agency Progrum Jbr Brazil
ClvrnnrDGE UNIVERSITY
PRESS
Published by the Press Syndicate of the University of Cambridge The Pitt Building, Trumpington Street, Cambridge CB2 IRP ' SA 4 0 W e s t 2 0 t h S t r e e t ,N e w Y o r k , N Y 1 0 0 1 1 - 4 2 1 I U l0 Stamford Road, Oakleigh, Melbourne 3166, Australia @ Cambridge University Press 1982, 1995 First published 1982 Second edition 1995 Printed in the United States of America Library of Congress Cataloging-in- Publicatittn Data Sheriff. Robert E. Exploration seismology / R. E. Sheriff' L P. Geldart. 2nd ed. p. cm. Includes bibliographical references. ISBN 0-521-46282-7.- ISBN 0-521-46826-a(pbk ) l. Seismicprospecting.
I. Geldart, L. P II. Title.
1994 TN269.S52415 622'.1592-dc20
94-4153 CIP
A catalogrecord for this book is availablefrom the British Library ISBN
Hardback 0-521-46282-7 0- 521-46826-4PaPerback
Contents
Preface Mathematical conventionsand symbols Generalrules and definitions Latin symbols Greek symbols I
2
Introduction Overview L I Outline of seismicmethods l.l.l Seismicreflectionmethod 1.1.2Seismicrefractionmethod 1.2 History of seismicexploration 1.2.I Historicalsources 1.2.2Preliminaryevents |.2.3 Early applicationsto petroleum exploration 1.2.4The GeophysicalResearch Corporation 1.2.5Other activitiesin the 1920s 1.2.6Early geophysicalcasehistory 1.2.7Developmentof the geophysicalcontractingindustry 1.2.8Evolution of reflection equipmentand methods 1.2.9Reproduciblerecording,the common-midpointmethod, and nonexplosivesources L 2 . l 0 R e c e nh t istory 1.3 Geophysicalactivity 1.3.1The future of exploration seismology 1.3.2History of seismicactivity 1 . 3 . 3D a t a f o r l 9 9 l 1.4The literatureof exploration seismology References Theory of seismicwaves Overview 2.1 Theory of elasticity 2.1.1Waveson a stretchedstrine 2 . 1 . 2S t r e s s 2 . 1 . 3S t r a i n 2.1.4Hooke'slaw 2.1.5Elasticconstants 2.1.6Strainenergy 2.2Wave equations 2.2.1Scalarwaveequation 2.2.2Yector waveequation 2.2.3Waveequationincluding source term
xi xiii xiii xiii xv I I 2 2 z J J J
J
8 9 l0 l3 l4
l8 2l z3
23 24 26 28 3l JJ JJ JJ JJ
35 36 J I
38 38 39 3 9 40 40
2.2.4 Kir chhoff's theorem 2.2.5Plane-wavesolutions 2.2.6 Spherical-wave solutions 2.3 Generalaspectsof waves 2.3.1 Harmonic waves 2.3.2Waveinterference 2.3.3Huygens'principle 2.4 Body waves 2.4.1 P-wavesand S-waves 2.4.2 Displacementand velocity potentials 2.4.3Waveequationin fluid media 2.4.4Boundary conditions 2.4.5Wavesfrom a sphericalsource 2.5 Surfacewaves 2 . 5 . 1G e n e r a l 2.5.2Rayleighwaves 2.5.3Stoneleywaves 2.5.4 Love waves 2.5.5Tube waves 2.6 Anisotropic media 2.6.I Typesof anisotropy 2.6.2Transverseisotropy 2.6.3Waveequationfor transversely isotropic media 2.7 Effectsof the medium on wave propagation 2.7.1 Energydensityand geometrical spreading 2.7.2Absorption 2.7.3Relativeimportanceof absorptionand spreading 2.7.4Dispersion;group velocity 2.7.5Reflectionand refraction; Snell'slaw 2.8 Diffraction 2.8.1Basicformulas 2.8.2 Diffraction effect of part of a plane reflector 2.8.3Time-domain solution for diffraction 2.8.4Diffraction effectof a halfplane 2.8.5Using Huygens'principle to construct diffracted wavefronts Problems References
3 Partitioning at an interface Overview 3.I Application of boundary conditions
4l 4l A 1 AL
43 43 ^ a
+J
44 44 44 46 47 41 47 49 49 49 50 52 53 55 55 56 56 57 57 59 60 60 62 63 63 64 65 66 68 68 1l It IJ
t)
CONTENTS 7.I Determining location 7 . 1 . 1L a n d s u r v e y i n g I .1.2 Marine positioning 7 .1 . 3R a d i o p o s i t i o n i n g 7.1.4Transitsatellitepositioning 7.1.5Global PositioningSystem (GPS) 7.1.6Acousticand inertial positioning 7.1.7 Locating the streamer 7.2 Impulsiveland energysources 7.2.1The desiredsource 7.2.2 Explosivesourcesin boreholes 7.2.3Largeimpulsivesurfacesources 7.2.4Small surfacesources 7.3 Nonimpulsiveenergysources 7.3.1Vibroseis /.-1..Z)OSle
7.3.3Choiceof land sources 7.4 Marine equipment 7.4.I General 7.4.2Bubble effect 7.4.3Air guns 7.4.4Implodersand other marine sources 7 . 4 . 5C h o i c eo f m a r i n es o u r c e s 7.5 Detectors 7.5.I Theory of geophones 7.5.2At-the-geophone digitization 7.5.3Hydrophones 7.5.4Streamers 7.5.5Matchinghydrophoneand geophonerecords 7.6 Recording 7.6.I Amplifier requirements 7 . 6 . 2R e c o r d i n g instruments 7.6.3Analog recording 7.6.4 Digital representation 7.6.5Digital instruments 7.6.6Display Problems References Reflectionfield methods Overview 8.I Basicconsiderations 8.1.1Data acquisition 8 .1 . 2C r e wo r g a n i z a t i o n 8.1.3Environmentaland safety considerations 8.1.4Conductof a field survey 8.2 Field operationsfor land surveys 8.2.1The program 8.2.2Permitting 8.2.3Laying out the line 8.2.4Field procedures 8.3 Field layouts 8.3.1Spreadtypes 8.3.2Singlefoldrecording 8.3.3Common-midpointmethod
vll
191 l9l 192 193 194 195 191 198 198 198 199 204
20s 206 206 210 210 2tl 211 213 214 214 217 2t8 218 223 223 225 22s 226 226 226 221 229 230 ZJJ
234 236 239 239 239 239 239 240 240 241 241 241 241 242 z+J z+J
244 244
8.3.4Practicalconstraintsand specialmethods 8.3.5Array concepts 8.3.6Uniform linear arrays 8.3.7Weighted(tapered)arrays 8.3.8Areal arrays 8.3.9Practicalconstraintson arrays 8.3.10Spatialsamplingrequirements 8.3.1I Extendedresolution 8.4 Selectionof field parameters 8.4.I Noise analysis 8.4.2Determiningfield parameters 8.4.3Field testing 8.5 Defining the near surface 8.5.1Uphole surveys 8.5.2Near-surfacerefraction 8.6 Marine methods 8.6.I Conventionalmarine operations 8.6.2Shallow-waterand obstructed operauons 8.6.3Profiling methods operations 8.7 Transition-zone 8.8 Data reduction 8.8.1Field processing 8.8.2Elevationand weatherins corrections 8.8.3Picking reflectionsand preparingcross-sections Problems References Data Processing Overview 9.1 Transforms 9.1.1Integraltransforms 9.1.2Fourieranalysisand synthesis 9.1.3Fouriertransforms 9.1.4MultidimensionalFourier transforms 9.1.5Radon (r-P) transforms 9.1.6 Implementationof transforms 9.2 Convolution 9 . 2 . 1T h e c o n v o l u t i o no P e r a t i o n 9.2.2 Sampling,interPolating,and aliasing 9.2.3Filtering by the earth 9.2.4W aterreverberationand deconvolution 9.2.5 Multidimensionalconvolution 9.3 Correlation 9.3.I Cross-correlation 9.3.2Autocorrelation 9.3.3Normalizedcorrelation 9.3.4VibroseisanalYsis 9.3.5Multichannelcoherence 9.3.6Sign-bitrecording 9.4 Phaseconsiderations 9.5 Deconvolutionand frequencY filterine
245 247 247 250 250 251 252 253 253 253 254 255 256 256 256 258 258
260 260 260 261 261 261 266 268 zt)
275 275 216 276 27'l 21'7
218 218 218 2't9 279 281 283 284 285 285 285 285 286 281 288 289 290 292
CONTENTS
viii 9 . 5 . 1G e n e r a l 9.5.2Deterministicinversefiltering 9.5.3Deghostingand recursive filtering 9.5.4 DeghostingbY combining geophoneand hYdroPhonerecords (Wiener)filtering 9.5.5 Least-squares 9.5.6Whitening 9.5.7Predictive(gaPPed)deconvolution 9.5.8Other types of deconvolution 9.5.9Waveletprocessing filtering 9.5.l0 FrequencY 9.5.1| Time-variantProcessing 9.5.I 2 Choosingdeconvolution parameters 9.5.I 3 Multichannel deconvolution 9.6 Automaticstaticsdetermination 9.6.1Interrelationof staticsand normal-moveoutcorrectlons model 9.6.2The surface-consistent the Maximizing 9.6.3 Powerof the stackedtrace 9.6.4Refractionstatics 9.7 Velocityanalysis(velocitY spectrum) 9.7.I Conventionalvelocityanalysis 9.7.2Velocitypanels 9.7.3PickingvelocitYanalYses 9.7.4Usesand limitationsof velocity analyses 9 .7.5 Horizon velocitYanalYsis 9.8 Preservationof amplitude information 9.9 Apparent-velocity(2-D) filtering 9.10Stacking 9 . 1 0 . 1G a t h e r s 9.10.2DMO (dip-moveout) correction 9 . 1 0 . 3M u t i n g 9. 10.4Common-midPointstacking 9. 10.5Weightedstacking 9.10.6Diversity stacking 9.10.7Simplanstacking 9.1I Other processingtechniques 9 . 1l . l r p t r a n s f o r mP r o c e s s i n g (slant stacking) 9.11.2IntelligentinterPolation 9.11.3AutomaticPicking analYsis 9.11.4Complex-trace to rePositiondata 9.12 Processes 9.12.1Introduction 9.I 2.2 Kirchhoff (diffraction-stack) migration 9.12.3Migration in the frequencydomain wavenumber methodof 9.12.4Finite-difference u are-equationmigration 9 . 1 2 . 5D e p t hm i g r a t i o n 9 .I 2 . 6 H y b r i d m i g r a t i o n
9.12.7Relativemerits of different migration methods 9.12.8Resolutionof migrated sections 9.12.9Other migrationconsiderations 9. l3 Data-processingProcedures sequence 9. I 3.I Typicalprocessing and 9.13.2lnteractiveProcessing workstations inversion 9.l4 Generalized Problems References
292 292 292 293 293 295 298 298 299 300 300 I0
302 303 303 303 303 305 305 306 306 309 309 3 lr 3ll 313 315 316 316 316 319 320 321 322 322 324 324 324 325 325 326 326 327 329 330 JJJ
334
Geologicinterpretationof reflectiondata Overview 10.1Basicgeologicconcepts 10.LI Generationand migrationof hydrocarbons 10.1.2Typesof traPs I 0.2 InterpretationProcedures 10.2.1 FundamentalgeoPhYsical assumPtions 10.2.2Collectionand examination of data 10.2.3Pickingreflections 10.2.4Mapping reflectinghorizons 10.2.5Deducinggeologichistory g e l ld a t a i n t o a n 1 0 . 2 . 6l n t e g r a t i n w interpretation 10.2.7Workstations from 10.2.8Drawingconclusions reflectiondata color 10.2.9Displaytechniques; 10.3Evidencesof geologicfeatures 10.3.1ConcePtsfrom structural geology I 0 . 1 . 2B a l a n c i n gs e c t i o n S 1 0 . 3 . 3F a u l t i n g 10.3.4Foldedand flow structures 1 0 . 3 . 5R e e f s 10.3.6Unconformities 10.3.7Channels 10.3.8StratigraphictraPs 10.3.9Integrationwith other geophysicaldata 10.4Modeling 10.4.1 lntroduction 10.4.2Physicalmodeling 10.4.3ComPutermodeling 10.4.4Syntheticseismograms I 0.4.5Ray-tracemodeling 10.5Lateral variationsin velocity 10.5.1Gradualchanges 10.5.2Suddenchanges I 0.6 Three-dimensional interpretationof 2-D data I 0.7 Stratigraphicinterpretation 1 0 . 7 . 1I n t r o d u c t i o n 10.7.2SequencestratigraPhY
134 334 335 335 335 340 340 343 346 349 349 350 350 351 J)J
353 353 356 357 359
359 361 JOJ
363 364 364 310 37r -r/o
182 385 386 388 389 390 390 390 391 392 392 392 392 395 398 398 398 401
CONTENTS
10.7.3Time significanceof reflections 10.7.4Depositionalmodels 10.7.5Systemtracts 10.7.6Seismic-facies analysis I 0.7.7Reflection-character analysis 10.8Hydrocarbon indicators 10.9Crustal studies Problems References 1l
Refraction methods Overview l l.l Field techniques I l.l.l In-linerefractionprofiling I 1.1.2Broadsiderefractionand fan-shooting l l . l . 3 G a r d n e r 'm s e t h o do f defining salt domes I 1.1.4Marine refraction I 1.2Refractiondata reductionand processing I L3 Basic-formulainterpretation methods I 1.3.1Using basicformulas I L3.2 Adachi'smethod I 1.3.3Generalizedreciprocal method (GRM) I 1.4Delay-timeinterpretation methods 1.4.1Delay time 1.4.2Barry'smethod 1.4.3Tarrant'smethod 1.4.4Wyrobek'smethod I 1.5Wavefrontinterpretation methods I 1.5.I Thornburgh'smethod I 1.5.2Hagedoorn'splus-minus method I 1.5.3Hales'graphicalmethod I 1.6Geologicinterpretationof refractiondata Problems References
t2 3-D Methods Overview 12.l 3-D acquisition 1 2 . 1I. A c q u i s i t i o nr e q u i r e m e n t s 1 2 . 1 . 2M a r i n e3 - D a c q u i s i t i o n 1 2 . 1 . 3L a n d 3 - D a c q u i s i t i o n 12.23-D processing 12.3Displayof 3-D data 12.4Interactive3-D interpretation 12.53-D interpretation Problems References
l 3 Specializedtechniques Overview
1X
403 404 405 409 4t2 415 418 4t9 420 425 42s 425 425 111
427 428 429 433 433 433 434 439 439 439 440 441 442 442
13.1Exploration with S-waves l3.l.l Why explorewith S-waves 13.1.2.S-waverecordingon land 13.1.3S-waverecordingat sea 13.1.4Processing and displaying S-wavedata 13.1.5Interpretationand useof S-wavedata 13.1.6 S-wavebirefringence I 3.2 Three-componentrecording 13.2.1Acquisition | 3.2.2Polarizationfi ltering 13.3Channelwaves(normal-mode propagation) 13.4Vertical seismicprofiling (VSP) 1 3 . 4 . 1G e n e r a l 13.4.2VSP typesand their uses 13.4.3Recordinga VSP 1 3 . 4 . 4V S Pp r o c e s s i n g 13.4.5VSP planning I 3.5 Seismictomography 13.5.1General I 3.5.2Tomographicconcepts 13.5.3Solutionfor a limited number of discretecells I 3.5.4Cross-holemeasurements 13.6Time-lapsemeasurements 13.7Boreholestudies I 3.7.I Salt-proximitysurveys 13.7.2Sonic waveformlogging I 3.7.3Boreholeteleviewer 13.8Passiveseismicmethods 13.9Joint inversion I 3.I 0 Geostatisticalmethods Problems References
t4 Specializedapplications 442 443 446 446 448 451 451 451 451 452 453 457 459 460 461 466 467 471 4'7|
Overview 14.I Engineeringapplications 14.l.l Objectivesof engineering work 14.1.2Refractionsurveyson land 14.1.3Reflectionsurveyson land 14.L4 Marine engineering surveys 14.2Coal geophysics 14.2.1Objectivesof coal geophysics 14.2.2Propertiesof coal 1 4 . 2 . 3L o n g w a l m l ining 14.2.4Surfaceseismicmethods 14.2.5In-seammethods 14.2.6Miscellaneousaspectsof coal geophysics I 4.3 Groundwater, environmental, archaeological,and geothermal applications I 4.4 H ydrocarbon-reservoir applications 14.4.1Introduction
411 471 471 474 474 415 476 476 476 483 483 487 487 487 488 489 492 492 492 493 496 491 499 500 500 500 500 s00 502 502 s02 503 505 505 505 505 505 506 506 508 508 508 508 508 509 5t2 512
5t2 512
CONTENTS l4.4.2The nature of hydrocarbon reservoirs I 4.4.3Reservoirdelineation I 4.4.4Reservoirdescription 14.4.5Reservoirsurveillance Problems References
l 5 Backgroundmathematics Overview l 5 . l S u m m a r i eos f b a s i cc o n c e p t s l5.l.l Determinants 15.1.2Vectoranalysrs 15.1.M 3 a t r i xa n a l y s i s 15.1.4Seriesexpansions 15.1.5Complexnumbers 15.1.6Method of leastsquares I 5.1.7Finite differences 15.1.8Numericalsolutionof differentialequations 15.l.9 Partialfractions 15.2Fourier seriesand Fourier transforms 15.2.1Fourierseries I 5.2.2Fourier integral I 5.2.3Fourier transforms I 5.2.4Multidimensional Fourier seriesand transforms I 5.2.5Specialfunctrons 15.2.6Theoremson Fourier transforms I 5.2.7Gibbs' phenomenon I 5.2.8Convolutiontheorem I 5.2.9Cross-correlationtheorem I 5.2.l0 Autocorrelation l 5.2.1I Multidimensional convolution | 5 . 2 . 1 2R a n d o mf u n c t i o n s I 5.2.I 3 Hilbert transforms 15.3Laplacetransform 1 5 . 3 . 1I n t r o d u c t i o n 15.3.2Theoremson Laplace transforms 15.4Linear systems 15.4.I Introduction
15.4.2Linear systemsin seriesand parallel 15.5Digital systemsand z-transforms 15.5.1Samplingtheorem I 5.5.2Convolution and correlation of sampledfunctions 15.5.3z-transforms I 5.5.4Calculationof z-transforms; Fast Fourier Transform I 5.5.5Applicationof z-transforms to digital systems I 5.5.6Phaseconsiderations I 5.5.7Inteeralrelationfor inverse z-transforms 15.6Cepstrumanalysis 15.7Filtering 1 5 . 7 . 1I n t r o d u c t i o n 15.7.2Filter synthesisand analysis 15.7.3Frequencyfiltering 15.7.4Butterworth filters 15.7.5Windows 15.7.6Optimum filters Problems References
513 514 5t4 515 515 515 517 517 5r7 517 518 519 522 522 523 527 529 530 531 531 532 532 533 533 538 539 540 541 542
547 547 547
548 548 549 550 554 554 555 555 555 556 55'7 558 559 563 566
Appendices A
List of abbreviationsused
569
B
Trademarksand proper namesused
569
C
Randomnumbers
570
D
Units
570
E
Decibelconversion
5t\
F
Typicalinstrumentspecifications and conventions
571
542
5,OOO
3 s.ooo a.000 !,000 2.000 r,000
'77
' 79
! r
' lJ
' !5
laor
(a)
PercentMarineLine-Miles 5a
^
6J
55
6a
7t
t.aoo
I r.zoo 3 r.ooo E
loo
.5 -
600 a00
79
' t|
'!J
t5
'a7
t9
(b)
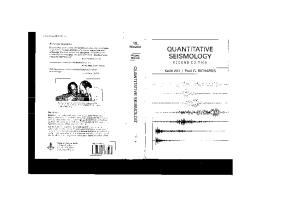
Frg. 1.27 Worldwide land and marine acquisition. The stippled area indicates land, the diagonal slashed marine. (From Riley, 1993.)(a) Number of field crew-months; (b) volume of data acquired.
pecting(1938)combined earthquakeand exploration >eismology. Although geophysicalliteratureis publishedin several languages,the seismologistwho reads English is especiallyfortunatein that almost all important refer3ncesare in this language.Most of the important papersand books that haveappearedin other languages :ave either English equivalentsor English transla:rons.Furthermore, most of the important technical pubrapersare containedin twojournals, Geophysics, .rshedby the Society of Exploration Geophysicists SEG), and GeophysicalProspecting,published by the
29
European Association of Exploration Geophysicists (EAEG). The Society of Economic Geophysicists was founded in Houston in 1930;the name was changed that sameyear to the Societyof PetroleumGeophysicists and in 1931to the Societyof Exploration Geophysicists.It continuesto be the largestprofessional geophysicalsocietytoday.The societybeganpublication of Geophysics in 1936.Prior to this, paperswere published in issuesof the AAPG Bulletin and Physics; many of the most important papersprior to 1936were republished in Early GeophysicalPapersin 1947. The European Association of Exploration Geophysicists was founded in l95l and beganpublishing Geophysical Prospectingin 1953. The unrefereedmagazinespublishedby thesetwo societies,The Leading Edge and the f irsl Break, provide surveyarticles,interpretationcasehistories,and information about newer topics. The Canadian and Australian Societiesof Exploration Geophysicsalso publish journals that are more along the lines of The Leading Edge and Ihe First Break than of Geophysics and GeophysicalProspecting.Otherjournals that often contain important articles are published in Europe, India, and elsewhere. The Bulletinof the AmericanAssociation of Petroleum Geologistsoften contains rmportant papers on interpretive applications of geophysics.The geophysicalliteratureof basicseismology also often contains papers of interestto exploration seismologists. The most important non-Englishjournalsare Russianand Chinese. A CumulativeIndex of Geophysicsis published every few years (most recently as a supplement to the March 1990issueof Geophysics); it lists the papersin the publicationsof most of the foregoingsocietiesexcept for those of the American Associationof Petroleum Geologists.The cumulativeindex is also availableon a computerdisk, which also liststhe expanded abstractsofpapers given at the annual meetings.This computer disk can be searchedfor key words. The most important papers from Geophyslcsare reprinted in the 25th and 50th anniversaryvolumes(Classicpapers of the past 25 years,1985)and important exploration seismicpapers from various journals are reprinted in three volumes of the Treatiseof Petroleum GeologyReprint Serles(Beaumont and Foster,1989). A seriesof 14 (as of 1994) reprint volumes dealing with various subjectsand a number of other geophysics books are published by the Society of Exploration Geophysicists. A multitude of books on various aspectsof seismic explorationare availabletoday.In the first edition, we were able to list most of the important books on aspects of seismicexploration, but today there are so many that it is not feasibleto do this. Many are referencedin subsequentchapters.Seismictechnologytoday embracesso much signal processingand computer technologyas well as geologythat a readinglist would include many works that are not specifically geophysical.Particular mention should be made of
= 6
E
4ooo
A o
!l1E66 1966
1075 costs adjusted for inflation. (Data from SEG Geophysital Activity Reports.)
F i g . 1 . 2 8 S e i s m i cc o s t s p e r m i l e ( 1 9 8 0 a n d p r e - 1 9 8 0 ,W e s t e r n Hemisphere; post-1980, worldwide). The dotted curves show
Table 1.5 Nonpetroleuml99l seismicactivity Surveytype
Typework
Expenditures(U.S.$x 103)
Minerals
P-wave reflection S-wavereflection Refraction P-wave reflection S-wavereflection P-wave reflection S-wavereflection Refraction Reflection Refraction Passive Reflection P-wave reflection S-wavereflection Refraction
5 290. I 050. t70. 820. 60.
Environmental Engineering
Groundwater Geothermal Oceanography Research
J l .
n a
12. 410. I 10. 0.3 920. 4 910. I 50. 15.
Cost/mile
Costikm
3 150. 6 900. 2 900. 7 300.
1 960. 4 300. I 800. 4 600.
I 500. 1*0. 6 100. 4 300 I 600.
940. 780. 3 800. 2 600. I 000.
90. 2 900. 50000. l5 000.
60. I 800. 31000. 9 300.
REFERENCES the safety and environmental guides published by the International Association of Geophysical Contractors (IAGC). References Abbot,H. L. 1878.On the velocityof transmission of earth waves. Amer.J. Sci.Arts,Ser.3, 15:178-84. Abriel,W.L., P S.Neale,J.S.Tissue, andR. M. Wright.1991. Modern technology in an old area. Bay Marchand revisited. The Leading Edge, 10(6):21,35. Barrington, lo
T. 1982. Cecil Green. The Leading Edge, l(l):
/4.
Barton,D. C. 1929.The seismicmethodof mappinggeologic structure.In Geophysical Prospecting, pp. 572,624.New York: AmericanInstituteof Mining and MetallurgicalEngineers. Bates,C. C., T. F. Gaskell,and R. B. Rice. 1982.Geophysics in the Afairs of Man Oxford: PergamonPress. Bates,R. L., and J. A. Jackson.1987,Glossaryof Geology,3d ed. FallsChurch,VA: AmericanGeologicalInstitute. Beaumont,E. A., and N. H. Foster.1989.Geophysics I: Seismic .Vethods;Geophysics II: Toolsfor SeismicInterpretation;Geopht'.sics III: GeologicInterpretationof SeismicData,Treatiseof PetroleumGeology,ReprintSeriesNos. 12, 13,and,14.Tulsa: .{mericanAssociationof PetroleumGeologists. E[rrn, W T. 1960.A review of geophysicalinstrumentation. Geophysics, 25277-91. - arlton, D. P. 1946.The History of the Geophysics Department. Houston:HumbleOil and RefiningCo. -lark, R. D. 1982.Gerald Westby.The LeadingEdge,l(l): .rrk. R. D. 1983.SidneyKaufman. The LeadingEdge,2(7\: ::7. :rk. R. D. 1984a.T. I. Harkins. The LeadingEdge,3(4\: r t8. ..r-k.R. D. 1984b.C. Hewiu Dix. The Leading Edge,3(8\: .
1 1
.:k. R. D. 1985.EndersRobinson.The LeadingEdge,4(2): - 10. ,:i. R. D. 1990a.Theodor Krey. The LeadingEdge,9(4); : lt. .:i. R. D. 1990b.Kenneth E. Burg. The Leading Edge, * l t ) ) :l 3 1 6 . .::. papersof the past25 years.1985.Geophysics, 50: 179'l:lrer, E. 1935. Notes on the early history of applied geo!:;s in the petroleum industry. Trans. Soc.Pet. Geophys.,6: r Reprinted in Early Geophysical Papers of the Society of ,ttion Geophysiclsts,pp. 245-54. Tulsa: Society of Explo: Geophysicists,1947.) J B. 1992.Seismicoveryiew.New Orleans: Howard, Weil, -rsse.Friedrichs Inc. . T A, 1970. A Brief History of Gulf's Geophysical Pros'.- Pittsburgh: Gulf Researchand Development Co. r. S . and D. A. Keys. 1928. Applied Geophysics. Cam.. Cambridge University Press. :::r. E. I. 1974. Vertical Seismic Profiling Tulsa: Society : .ration Geophysicists. . - ,.ri. K. 1991.Geophysical activity in 1990. The Leading Itlll):45-72. , H. 1979. John Clarence Karcher. 1894 1978. father ', -::ection seismograph.Geophysics,44: 1018-21.
3l Hecker,O. 1990.Ergebnisse de Messungvon Bodenbewegungen bei einer Sprengung. Gerland'sBeitrrige zur Geophysik,4: 98-104. Heiland,C. A. 1929a.Moderninstruments and methodsof seismic prospecting.ln Geophysical pp. 625-53.New Prospecting, York: American Institute of Mining and Metallurgical Engineers. Heiland, C. A. 1929b.Geophysicalmethods of prospectingPrinciplesand recentsuccesses. Quart. Col. Sch.Mines,A(\,t, Jeffreys, H, 1952.TheEarth,3ded.Cambridge:CambridgeUniversityPress. Karcher, J. C. 1987.The reflection seismograph:Its invention and usein the discoveryof oil and gasfields.TheLeadingEdge, 6(11):l0-20. Keppner,G. 1991.Ludger Mintrop. The LeadingEdge, l0(9): 2 t-8. Knott, C. G. 1899.Reflexionand refraction of elastic waves, with seismologicalapplications.Phil. Mag., 48:64-97. - The First Fifty Laing, W E., and F. Searcy.1975.Geophysics lears.Houston:Conoco. Landmark Graphics Corp. 1992.The ComingReunionof Seismic Interpretationand ProcessingHouston: Landmark Graphics Corp. Leet,L. D. 1938.PracticalSeismologyand SeismicProspecting. New York: Appleton-Century. Lindseth,R. O. 1990.The new wavein explorationgeophysics. TheLeadingEdge,9(12)t9-15. Love, A. E.H. 1927. Some Problemsof GeodynamicsCambridge:CambridgeUniversityPress. Malamphy,M. C. 1929.Factorsin designof portablefield seismographs.Oil llteekly,March 22, 1929. Mallet, R. 1848.On the dynamicsof earthquakes; beingan attempt to reducetheir observedphenomenato the known laws of wave motion in solids and fluids. Irans Roy.Irish Acad., 21:50-106. Mallet,R. 1851.Secondreporton the factsofearthquakephenomena.BAAS,2l: 272-320. Mayne,W. H. 1982.The evolutionof geophysical technology. TheLeadingEdge,l(l):75-80. McGee,J. E., and R. L. Palmer.1967.Earlyrefractionpractices. ln SeismicRefractionProspecting, A. W. Musgrave,Ed. Tulsa: Societyof ExplorationGeophysicists. McGuckin,G. M. 1945.History of the geophysical exploration of the CameronMeadowsDome,CameronParish.Louisiana. Geophysics, l0: l-16. Milne, J. 1895.Seismicexperiments. Trans.Sei,s.Soc.Jpn., B: l-82. Mintrop, L. 1931.On theHistoryof theSeismicMethodfor theInvestigationof Underground Formationsand Mineral Diposits.' Hanover,Germany:Seismos. Owen,E. W. 1975.Trekof the Oil Finders:A History o! Explorationfor Petroleum,AAPG Memoir 6. Tulsa:American Association of PetroleumGeologists. Petty,O. S. 1976.SeismicReflections. Houston: Geosource. Proffitt,J. M. 1991.A historyof innovationin marineseismic data acquisition.TheLeadingEdge,l0(3):24 30. Proubasta,D. 1982.O. S. Petty.TheLeadingEdge,l(7): 16-24. Proubasta,D. 1983a.John Hollister.The LeadingEdge,2(7): 14 t9. Proubasta,D. 1983b.Henry Salvatori.TheLeadingEdge,2(8\: t4-22.
)z
Proubasta,D. 1983c.John Crawford. The LeadingEdge'2(12): t6-26. Proubasta,D. 1984.Remembranceof geophysicalthings past' TheLeadingEdge,3(10'):32-8' Proubasta,D. 1985a.SvenTreitel. TheLeadingEdge'4(2\:24 8' Proubasta,D. 1985b.Harry Mayne. The Leading Edge' 4(7): t8 24. Proubasta,D. 1986a.Erik Jonsson.The Leading Edge' 5(6)" t4-23. Proubasta,D. 1986b.Enders Robinson and the shot heard round the geophysicalworld. TheLeadingEdge,3(9):14 17' Proubasta,D. 1991.Maurice Ewing. The LeadingEdge,l0(3)" 15 20. Rayleigh,Lord. I 885.On wavespropagatedalongthe planesurfaceof an elasticsolid.Proc.LondonMath Soc.,17:4-11' Rieber,F 1936.A new reflectionsystemwith controlleddirecl: 97-106. tional sensitivity.Geophysics, activityin l99l Riley,D. C. 1993.Specialreport:Geophysical The LeadingEdge,l2z 1094-1I 17. Robertson,H. 1986.EveretteLee DeGolyer.TheLeadingEdge, 5(ll):l4 21. Robinson,E. A. 1985.A historicalaccountof computerresearch in seismicdata processing,1949-1954.The Leading Edge,4(2\:40-5. Rosaire,E. E. 1935.On the strategyand tacticsof exploration for petroleum.J. Soc.Pet. Geophys.,6t1l-26 (Reprintedin Eariy GeophysicalPapersof the Societyof Exploration-Geophysicrsri pp. 255 70. Tulsa: Societyof ExplorationGeophysicists,1947.) Rosaire.E. E.. and J. L. Adler. 1934.Applicationsand limitationsof dip shooting.Bull. AAPG, 18: 19 32. Rosaire,E. 8., and O. C. Lester,Ir. 1932.Seismologicaldiscoverv and partial detail of Vermillion Bay salt dome.Bull' AAPG'
INTRODUCTION
Papersof the Society 16: 5l-9. (Reprintedin Early Geophysical pp. 381-9. Tulsa: Societyof Exof Exploration Geophysicists, 1947.) plorationGeophysicists, Schriever,W. 1952.Reflectionseismographprospecting How l7't 936-42. it started.Geophysics, Shaw H.. J. M. Bruckshaw and S. T. Newing' 1931.Applied London: His Majesty'sStationeryOffice. Geophysics. technologythrough Sheriff,R. E. 1985.History of geophysical in Geophysics.Geophysics,50':2299-2408' advertisements and interpretationoi seismtcreSheriff,R. E. 1988.Processing flection data: An historical pr6cis. The Leading Edge' 7(l): 40 2. Dictionaryof ExplorationGeo' Sheriff,R. E. 1991.Encyclopedic physics,3d ed.Tulsa:Societyof ExplorationGeophysicists. Tulsa: Societyof Sheriff,R. E., ed. 1992.ReservoirGeophysics. Exploration Geophysicists. Stoneley,R. 1924.Elasticwavesat the surfaceof separationof two solids.Proc. Roy.Soc.( London),A-106:416-28. ProspectrzgSudbury Sweet,G. E. 1978.History of Geophysical England:Spearman. of a newmethodof makingunUdden,J. A. 1920.Suggestions Bull. AAPG,4: 83 5. (Reprintedin dergroundobservations. 16:7l 5-16.) Geophysics, 14:6-9' Vajk, R. 1949.Baron Roland Eotvos.Geophysics, Weatherby,B. B. 1940.History and developmentof seismic 5: 215-30. prospecting.Geophysics, in Oklahoma' B. B. 1945.Early seismicdiscoveries Weatherby, s, l0t 345-67. Geophysic Wiechert,8., and K. Zoeppritz.1907.Uber Erdbebenwellen' der Wissenschaften Nachrichrenvonder Ki)niglichenGesellschaft pp. 415-549.Berlin. zur Gdttingen, of the seconddecadeof seisWilcox,S. W. 1990.Reminiscence TheLeadingEdge,9(8ll42-5. mic prospecting.
2
Theory of seismicwaYes
Overview
fronts and raypathsare introduced,as is the more general Huygens'principle approach. The two forms of the wave equation that had been derivedearlierare relatedto two typesof disturbances that can travelthrough the body ofsolids ($2.4).These involve changesin volume (P-waves)and rotations (S-waves).Discussion of potential functions, from which particle displacementsand velocitiescan be derived, follows.At interfaces,both stressesand particle displacementsmust be continuous; these boundary conditions are discussedin $2.4.4. Surface waves are examined next. Rayleigh waves are important becauseof the ground-roll noise that they produce on seismicrecords.Love, Stoneley,and tube wavesare encounteredoccasionally. Most seismictheory assumesthat media are isotropic, that is, their propertiesare the sameregardless of the direction of measurement.Anisotropy ($2.6)of severaltypes has beenobserved;howevet anisotropic effectsare usually small. The most important exceptions requiring study are those of transverseisotropy becauseof layeringand fracturing. Section2.7 examineswhat happensto seismicbody wavesas they travel in the earth. Intensity decreases becauseofgeometricalspreading(divergence)and absorption (and partitioning at interfaces;seechap. 3). Divergenceis the most important factor affectingthe change of intensity for the first few kilometers,but eventuallyabsorptionbecomesdominant. Absorption increasesapproximatelylinearly with frequencyand hencechangesthe waveshapewith distance.Various expressionsfor absorption are interrelated.Dispersion and the conceptsofgroup and phasevelocityare discussed,although dispersion is not an importqgt factor in seismicexploration. Reflection and refraction are discussedin $2.7.5. Diffraction ($2.8),the scatteringof wavesat discontinuities, involves somewhat complex mathematics. However, the construction of diffraction wavefronts using Huygens'principle is fairly straightforwardand nonmathematical.
The seismicmethod utilizesthe propagationof waves through the earth. To introduce the basicconceptsof wave motion, we flrst discusswaveson a stretched string($2.1.1)and introducedefinitionsofphase,frequency,wavelength,and other terms dealingwith periodicity.Becausewavepropagationdependsupon the elasticpropertiesof the rocks, we next discusssome of the basicconceptsof elasticity.(For more thorough treatments,seeSaada,1974,or Landau and Lifshitz, 1986.) The sizeand shapeof a solid body can be changed by applying forcesto the externalsurfaceofthe body. Theseexternalforcesare opposedby internal forces, which resistthe changesin sizeand shape.As a result, the body tendsto return to its original condition when the externalforcesare removed.Similarly,a fluid resists changes in size (volume) but not changes in shape.This property of resistingchangesin srzeor shapeand of returning to the undeformedcondition when the externalforcesare removedis calledelasticity. A perfectlyelasticbody is one that recoverscompletelyafter beingdeformed.Many substances including rocks can be consideredperfectly elasticwithout appreciable error provided the deformations are small.as they are in seismicsurveys. The theory of elasticity relatesthe forces that are applied to the external surface of a body to the resulting changesin size and shape.The relations between the applied forces and the deformations are most convenientlyexpressedin terms of the concepts of stressand strain. Strain, a changein shapeor dimensions,is generallyproportional to the stress(force per unit area) that producesit, as statedin Hooke's law. The constantof proportionality is called an elastic constant, or modulus, and moduli for different types of stressand strain are interrelated. Section 2.2 concerns seismic-wavemotion. Newton's secondlaw of motion, that an unbalancedforce on a massproducesan acceleration,is used to derive two forms of the waveequation.The waveequationis expressedin vector as well as the more conventional scalarnotation. Methods of including a sourceof disturbance and Kirchhoff's theorem are also given in this section. Plane- and spherical-wave solutions to the wave equation are given next. Waves are disturbances that travel through the medium. The concepts of wave-
2.1 Theory of elasticity 2.l.I Waveson a stretchedstring As an introduction to seismicwavesin three dimensions, we consider the one-dimensionalwave in a stretched string becausemany basic conceptsof wave JJ
THEORY OF SEISMIC WAVES
)+
motion can be more simply illustrated in this way. Parts of the following discussionwill be treated later in a broadercontext. We assumean ideal case where the mass of the string per unit length, p, is negligiblysmall in comparison with the tension,t, in the string, that the string when at rest is along the x-axis,and that the displacements,rf, which are parallel to the y-axis, are small in comparisonwith the length of the string so that angles o., and o., are also small (fig. 2.la). Becausethese anglesare not equal,the tensionproducesa net force in the y-direction (the net force in the x-direction is negligible)on an elementof the string, Ax, equal to t(sin c, - sin c,) - r(tan ct2- tan c,) - t(d{/dxl-, d$/dxl,,) - t A(drl/dx). Newton's secondlaw of motion statesthat this force equals the product of the massp Ax and the acceleration02'1il6t2. Dividing both sidesby roAx and taking the limit as Ax -+ 0 givesthe one-dimensionalwaveequation:
or P.ol /-cta3t
, J-__\./i
: (plt)0' ,$l0tz: (llW)02\tl0t,, (2.1) 02$10x2 where V = (rlp.)",(comparewith eq. (2.45)).Equation (2.1)showsthat Zhas dimensionsof distance/time,or velocity.The waveequation relatesvariation in space (the left side)with variation in time (the right side). The general solution of eq. (2.l) (also called d'Alembert'ssolution;see$2.2.5)is ,1,(x,t) = t, k - Vt) + 'ltr(x + Vt), (22) whererf , and rf, are arbitrary functions,rf , is a disturbancemoving in the positivex-directionwith increase of time, rf, a disturbancemoving in the negativexdirection, and V is the velocity of propagationalong the string (seethe following). Fourier analysis($9.1.2) showsthat any waveform (within reason)can be representedby a superposition of harmonic (sinusoidal)waves,so we do not losegenerality by confining our attention to harmonic waves. Thus, we considera harmonic solution of eq. (2.I ) in the form r.p= I cos [(2,n/\)(x * Vt)].
vlt.
F,aqucnct
I
-
P c ri o d
(b)
--T----:
l
l
tFWovalane
wov.numbrr =
th....+l
a;r..L;gi;(c)
(2.3)
The waveform is harmonic with r! varying between * A and - A ; A is the amplitude.If we look at the wave passinga fixed point in space(fig. 2.lb), period 7is the time betweensuccessive repetitionsof the waveform; frequencyv : llT is the number of wavesper unit time. If we look at the waveformat somemoment of time (fig. 2.lc) the distancebetweensuccessive repetitions of the waveform is the wavelength)\ and l/L is the wavenumber or number of wavesper unit distance. Multiplying IIT and llltby 2rr, we get the angularfrequencya : 2nlT : 2rv and the angular wavenumber r : 2rl}'. Becausev is the number of wavespassinga fixed point per unit time and eachwavehas length tr, velocity Z must be given by the equation V:
r+- PrriOd --l !
Q.4)
The argument of the cosine in eq. (2.3), namely,
(d) Fig. 2.1 Waves on a stretched string. (a) Portion of the string showing the relation betweendisplacementand tension; (b) representation of the wave in time; (c) representation of the wave in space;(d) the effect of change in mass/unit length.
(2rllr) (x - Vt1 : r(x - Vt): (rcx - ot), is calledthe phase.ln eq. (2.3), the phaseis zero at the origin; at times we add a fixed phase angle ^yoso that the phase becomesKr - r,-lt+ "yo.
THEORY OF ELASTICITY
I
35
Returning to the stretchedstring, if the mass/unit length changesabruptly from p, to p2 at somepoint, say, x : 0 (fig. 2.ld), certain boundary conditions ($2.4.4)must hold, namely,both the displacementand the y-componentof the tension in the string must be continuous,that is, neither changesin value as we go through the junction. These conditions can be expressedby the equations *,.r, : t,,rn,, r(dr!/dx),"r,: r(drlr/dx).,rn,.
(2.s)
We take the incident waveas l, cos (r,x - ol) coming from the left and the wavepassingon to the right (the transmittedwave) as l, cos (rrx - tot); however,we cannot satisfyeqs.(2.5)with thesetwo wavesonly and we must postulatea reflectedwave going to the left, l, cos (x,x + cor).Substitutinginto eqs.(2.5),we find that the boundaryconditionswill be satisfiedprovided A,+ A,: A,,
*,A,) ",)',: iit,.
I
(2.6a)
]
Equations(2.6a) can be solved for A,and A,: R : A , lA , : ( r z - x , ) / ( x *, r , ) , I
T= rq.,lA,:Z^,4*rl*,.y,
i
(2.6b)
where R and T are called the reflectioncofficient (or refectivily) and the transmissioncofficient, respectively(seealso93.2). If the string is fixed at x : 0, the effectis the same as if p, : -; then T : 0, so no wave is transmitted, and R : +1, which meansthat the reflectedwave is the sameas the incident one exceptthat the direction of travel is reversed.The two wavesinterfere($2.3.2) at the fixed end to produce perfect cancellation, hence,zero movement(node).If both ends are fixed, perfectcancellationmust occur at both ends,so these are nodes. When a string fixed at both ends is vibrating at its lowestfrequency,calledthe fundamental(u"), the displacement has its maximum amplitude at the midpoint (antinode). The wave pattern is fixed, so the wave is said to be stationary,or standing.If the string length is L, L : ),/2 and v,,: VII\ : Vl2L. The strins
Fig. 2.2 Componentsof stresson facesperpendicularto the x-axis.
can vibrate in a number of patterns called modes or eigenstates,the frequencies being harmonics (multi_ ples)of the fundamental,that is, vi = nvo,n : 1,2,3, . . . . In eachcase,the endsofthe string are nodesand L: nttl2: (2n)|t14. If the left end of the string is fixed and the right end free, we set K2 = 0 and get R = -1. The end of the string is an antinode, L = |t14, v^ : Vl4L, and the harmonicsare u : (2n + l)vo and,L : (2n + l)\14. The two casesof a string fixed at one end only and fixed at both endsare analogousto organ pipesilosed at one end only and closedat both ends(Logan, l9g7; s e ea l s oS 1 3 . 3 ) . 2.1.2 Stress S/ressis definedas force per unit area. Thus, when a force is applied to a body, the stressis the ratio of the force to the area on which the force is applied. If the force variesfrom point to point, the stressalso varies, and its value at any point is found by taking an infinitesimally small elementof area centeredat the point and dividing the total force acting on this area by the magnitudeof the area.If the force is perpendicularto the area, the stressis said to be a normal .r/re$ (or pressure).In this book, positive valuescorrespondto tensile stresses(the opposite convention of signs is sometimesused).When the force is tangential to the element of area, the stressis a shearings/ress.When the force is neither parallel nor perpendicularto the elementof area, it can be resolvedinto components parallel and perpendicularto the element;hence,any stresscan be resolved into component normal and shearingstresses. If we consider a small elementof volume inside a stressedbody, the stressesacting upon each ofthe six facesof the elementcan be resolvedinto components, as shownin fig. 2.2 for the two facesperpendicularto the x-axis.Subscriptsdenote the x-,1,-, and z-axes, respectively, and o,.*denotesa stressparallel to the y_ axis actingupon a surfaceperpendicularto the x-axrs. When the two subscriptsare the same (as with o.,), the stressis a normal stress;when the subscriptsare different (as with o,,), the stressis a shearingsiress. When the medium is in static equilibrium, the stressesmust be balanced.This meansthat the three stresses,o,,, or,, and o,.., acting on face OABC must be equal and opposite to the correspondingstresses shown on opposite faceDEFG with similar relations for the remaining four faces.In addition, a pair of shearingstresses, suchas oy,,constitutea coupletending to rotate the elementabout the z-axis,the magnitude ofthe couple being force X lever arm = (o u dy dz) dx. If we consider the stresseson the other four faces, we find that this couple is opposed solely by the couple due to the pair of stresseso"" with magnitude (o,, dx dz) d): Becausethe elementis in equilibrium,
THEORY OF SEISMIC WAVES
JO
the total moment must be zero; hence o", : or". In general,we must have or:
oii'
Au oy
(2.7\
r
2.1.3Strain When an elasticbody is subjectedto stresses, changes in shapeand dimensionsoccur.Thesechanges,which are called strains,can be resolvedinto certain fundamental types. Consider rectanglePQRS in the xy-plane (seefig. 2.3). When the stressesare applied,let P move to P', PP' having componentsu and v. If the other vertices Q, R, and S have the samedisplacementas 4 the rectangleis merelydisplacedas a whole by the amounts u and v,'in this case,there is no changein sizeor shape, and no strain exists.However,if u and y are different for the different vertices,the rectanglewill undergo changesin sizeand shape,and strainswill exist. Let us assumethat u : u(x,y) and y : r(r, y). Then the coordinatesof the verticesof PQRS and P'Q' R'S' are as follows: P(x, y): P'(x * u, y + v); Q@ + dx, y):
Q'(** d x* u + 4 a *,y * v *#*) ' S(x,y + dy): s'(" + u + !! dy,y +dy + r * j,ar)' R(x+dx,y+dy):
R ' ( " +d x * u + 4 d x . \ i , o r ,
y+dy*,*3.1a"+jjcr). In general,the changesin u and y are much smaller than the quantitiesdx and dy,' accordingly,we shall assumethat the terms (duldr), (6ulAfl, and so on are small enough that powers and products can be neglected.With this assumption,we seethe following: l . PQ increases in length by the amount (6ul0x) dx and PS by the amount (lvl0y) dy; hence 6ul0x and 6vl0y are the fractional increasesin length in the direction of the axes. 2 . The inflnitesimal angles6, and 6, are equal to \vl6x and 6ul0y,respectively. J . The right angleat P decreases by the amount El+E2:3vl3x+AulAy. 4. The rectangleas a whole has been rotated counterclockwisethrough the angle (6, 6r)12: (6vl3x - \ula)12. Strain is definedas the relativechange(that is, the fractional change)in a dimensionor shapeof a body. The quantities 6ul3x and 0vl6y are the relative increasesin lengthin the directionsofthe x- and y-axes, and are referred to as normal strains. The quantity 6vl6x i \ulEy is the amount by which a right anglein
sf -
au,.:Tar-"'|
,uj,---------l
iI
I
dy
t l rl
i
I
La=- Itv-
P ' I
---_______rt+-
l+-dx
. l-or
_J:'
F-l
I Fig. 2.3
J --\-au
ia'
u->\
I -N
Analysis of two-dimensional strain
the xy-plane is reducedwhen the stresses are applied, hence,is a measureof the changein shapeof the medium; it is known as a shearingstrain and will be denotedby the symbol e.,. The quantity (6vl6x dul6y)12,which representsa rotation of the body about the;-axis, does not involvechangein size or shapeand henceis not a strain; we shall denote it by the symbol 0-. Extending this analysis to three dimensions,we write (r.r,4 w) as the componentsof displacementof a point P(x, y, z). The elementarystrainsare thus
du Normal strains a," : -' dx 0v 8.. : ^ ' dy 6w.
(2.8)
4,,:
dz
: - y Shearingstrains 8,.,: Er, ' d !" x d !., E y " - - E : -'0y 4*4' 6z'
a,r:ar,:!-! dz
(2.e\
dx
In addition to thesestrains,the body is subjectedto simple rotation about the three axesgiven by ^
H
0":
e :
dwldv :
-
dvtdz
2
6ul6z - 6wl6x
(2.10)
z lvldx - 6ul0y
Equations(2.10)can be written in vectorial form (see $ l 5 . 1 . 2 ( aa)n d 1 5 . 1 . 2 ( c ) ) :
@ : 0 , i + e j + 0 , k : V x 6,
2
( 2.n)
THEORY OF ELASTICITY
J I
changein volume per unit volume A is . 0 u A : e . . * e ,' -, . * e - - : - - ' * ! * dx 0y
dz
(2.r2)
2.1.4Hooke'slaw
c 6
Stnin
-+
Ruptur
Tim.
_.+
In order to calculatethe strainswhen the stressesare known, we must know the relationshipbetweenstress and strain. When the strainsare small, this relation is given by Hookes /anl which statesthat a given strain is directly proportional to the stressproducingit. The strainsinvolvedin seismicwavesare usuallylessthan l0 8 exceptvery near the source,so that Hooke'slaw holds. When several stressesexist, each produces strains independentlyof the others; hence,the total strain is the sum of the strainsproducedby the individual stresses. This meansthat eachstrain is a linear function of all of the stressesand vice versa.This linearity has important implicationsthat will be utilized later: It allows us to representcurved wavefrontsas a superpositionof plane waves,for example,in p-r transforms($9.1.5 and 9.1l.l ), to expressa reflected wavetrainas a superpositionof individual reflectrons (theconvolutionalmodel),and to justify manyaspects of seismicdata processing. In general,Hooke's law leads to complicatedrelations. Stress and strain can both be regarded as second-order(3 x 3) matricesso that the Hooke'slaw proportionality relatingthem is a fourth-ordertensor. Stressand straincan alsobe lookedon as (l X 6) matrices(as in eq. (2.l5)) and the Hooke'slaw proportionality as a 6 x 6 matrix whoseelementsare elastic constants(Landau and Lifshitz, 1986:32 5l). Symmetry considerationsimmediatelyreducethe number of independentconstantsto 21. However,when the medium is isotropit',that is, when propertiesdo not dependupon direction, it can be expressedin the following relativelysimpleform (Love, 1944:102): o,, : \A * 2p,e,, (i : x, y, z), (2.13)
(D)
Fig. 2.4 Stress strain.time strain; (b) strain versus time.
U:v.r.
relationships. (a) Stress versus
o,,: 2p"e,,
(2.14)
Theseequationsare often expressedas a matrix equation, o : Ce: o.r*
where( : ui + vj + wk is the vector displacementof point P(x, y), and i, j, k are unit vectorsin the x-, y-, :- directions,respectively. The changesin dimensionsgiven by the normal strains result in volume changes when a body is stressed.The change in volume per unit volume is called the dilatationand representedby A. If we start with a rectangularparallelepipedwith edgesdx, dy, and d: in the unstrainedmedium. in the strainedmedium the dimensionsare dx(l + s,,), dy(l * e,.,),and d:(l + e--),respectively;hencethe increasein volume is approximately(e.. * e,,, * e,_)d,t dy dz. Because the original volume was (dx dy dz), we see that the
(i,j : x, y, z; i + j).
o"" C,,
o., oy o,,
I \ + 2 p \ I 0 0 0 \ tr+2pI 000 I \ \ + 2 p 0 0 0 0 0 p 0 0 0 0 0 p 0 0 0 0 0
l%,
1",, lu..
0 0 0 18r' p Ile,,
1"",
(2.rs) The equationis sometimeswritten e : So, whereS : C r. Components of C (or S) are sometimescalled stffiess (or compliance)components. The quantities\ and p are known as Lam6'sconstants. If we write e,, : o,,lp",it is evident that e,, is
T H E O R YO F S E I S M I CW A V E S
38 smaller the larger p is. Hence, p is a measureof the resistanceto shearingstrain and is often referred to as the modulus o/' rigidity, incompressibility,or shear modulus. Although Hooke'slaw has wide application,it does When the stressis increased not hold for largestresses. beyond an elastic limit (fi5. 2.4a), Hooke's law no longerholds and strainsincreasemore rapidly.Strains resulting from stressesthat exceedthis limit do not entirely disappear when the stressesare removed. With further stress, a plastic yield point may be reachedat which plastic flow begins and the plastic yieldingmay resultin decreasingthe strain.Somematerials do not pass through a plastic flow phase but rupture first. Rocks usually rupture at strains - 1 0 - 3 - 1 04 . Some materialsalso havea time-dependentbehavior to stress(fig. 2.ab). When subjectedto a steady stress,such materialscreep until eventuallythey rupture.Creepstraindoesnot disappearifthe stressis removed. 2.L5 Elasticconstants Although Lame's constantsare convenientwhen we are usingeqs.(2.13)and (2.14)other elasticconstants are also used.The most common are ktung'smodulus (E), Poisson's ratio (o), and the bulk ntodulus(ft) (the ratio symbol o is more or lessstandardfor Poisson's the subscriptsshould preventany confusion with the stressou). To define the first two, we considera medium in which all stressesare zeroexcepto,-. Assumdimensions ing o,. is positive(that is, a tensilestress), parallelto o., will increaseand dimensionsnormal to this meansthat e.. is positive(elono,, will decrease; gation in the x-direction)wherease,.,and €--are negative. Also, we can show(seeproblem2.la) that e,, : e--.We now defineE and o by the relations E:
o,,/e,,,
o : - e , , , / D . .: - e - - l e , , ,
(2.16) (2.11)
with the minus sign insertedto make o positive. To define the bulk modulus k, we consider a medium acted upon only by a pressure0; this is equivalent to the stresses o . r : o . , . . :o , . : 0 . o . , . , : o , , ,: o , r : - 0 , Pressure0 causesa decreasein the volume AT and a dilatation L : LYIT:, k is definedas the ratio of the pressureto the dilatation that it causes,that is,
k:
-911,,
( 2 .l 8 )
with the minus sign insertedto make k positive.Somel/k, is usedas an elasticcontimesthe compressibility, stant rather than the bulk modulus. By substitutingthe precedingvaluesin Hooke'slaw, we can obtain the following relations betweenE, o, and k and Lam6's constants,\ and p (seeproblems 2.lb and2.1c):
-
F
p(3\ + 2p) :
(2.re)
A+Lr (t=
A
2(}' + P)'
k : l (13 \ + 2 u , t .
(2.20) (2.21)
In nonviscousfluids, the shear modulus pr : 0, and hencek : \. Becausewe have not previouslygiven a specificname to L, we may call it thefuid incompressibility. By eliminating different pairs of constants among the three equations,many different relations can be derivedexpressingone of the five constantsin termsof two others(seeproblem2.2). The elasticconstantsare definedin sucha way that they are positive numbers.As a consequenceof this, o must have values between0 and 0.5 (this follows from eq. (2.20),becauseboth \ and p are positiveand hence\/(\ + p) is lessthan unity). Valuesrangefrom 0.05 for very hard, rigid rocks to about 0.45 for soft, poorly consolidatedmaterials.Liquids have no resistanceto shearand hencefor them p : 0 and o : 0.5. For most rocks, 4 k, and p lie in the range from 20 to 120GPa (2 x 10",to 12 x l0'0 N/m' ), trgenerally being the largest and p the smallest of the three. Tablesof elasticconstantsof rocks havebeengivenby Birch (1966).(Seealsoproblem2.4.) an isotropic Most of the precedingtheory assumes medium. In fact, rocks are usually in layers with differentelasticproperties,thesepropertiesoften varying with direction. Nevertheless, in discussingwave propagation,we generallyignore suchdifferencesand treat sedimentaryrocks as isotropic media; when one does so, the results are useful and to do otherwise leads to extremelycomplex and cumbersomemathematical equations,exceptfor the caseof transversely isotropicmedia,that is, media in which the properties are the samein one plane but different along the normal to the plane. Some rocks, especiallyshales,are transverselyisotropic,and more importantly, a series of parallel beds,eachof which is isotropic,but where the properties vary from bed to bed, behavesas though it is transverselylisotropic (Postma, 1955; Uhrig and van Melle, 1955).Anisotropyis discussed in $2.6. 2.1.6 Strain energy When an elastic medium undergoes deformation, work is done and an equivalentamount of potential energy is stored in the medium; this energy is intimately relatedto elasticwavepropagation. If the stresso,- resultsin a displacemente,., we assume that the stressis increaseduniformly from zero to o....,and hencethe averagestressis o,,/2. Thus, -E : work done per unit volume : energyper unit volume : o,,e,12.
WAVE EQUATIONS
39
Summing the effectsof all the independentstresses and using eqs. (2.13) and (2.14) gives (Love, 1944: 100) , :
o,u,,
:))
: j(o..",,
62u
p;, : unbalancedforce in the x-direction on ot- a unit volume
* orr.8r,,* o,,8,, * o..".."
* o,,,8.,, *
Newton's secondlaw of motion statesthat the unbalancedforce equalsthe masstimes the acceleration; thus, we obtain the equation of motion along the xaxls:
o--*er.)
: l' t[ +- ( \ A + 2 P " e ,*, t*e) ), ", 1 , - |I .
u*i'1
: jf 4' + p(r.l. + ef, + e?_) + lp(ei,+ ef- + e1.).
(2.22)
Notethat eq.(2.22)gives 0 E l 6 e , , :} ' A + 2 p e , , : o . . , : o\,., 6El0e,,: p,e\,. hence, 3E/6x,, : o ,
_ d o . , T, d o . , . dr 6y
(i,j : x, y, z).
(2.23)
lto,, ^A:u _ , do,, -t'df dr 0y
o , , +, 0 o , .d. r , a,
o , *
6o O ' ' d r
Because thesestresses areopposite to thoseactinson therearface,thenet (unbalanced) stresses are r,x
'-%,0r, dx
{o--r' 0x'
dx
ao'.. dx
6x
0y
do,_
0z
, r') 6:l
: (\ + r,)la+ u.v.r,
r, )St
where V2a is the Laplacian of u : A2ulAx2* 62ul0y,-t (seeeq. (15.14)).By analogy,we can write the 32ul0z2 equationsfor y and w.' o-v
p '
At2
_.,.
Similarexpressions hold for the other faces;hence,we hnd for the total force in the direction of the x-axis the expression do,. , do., T
: ^:1t p"v2u * *u1 C:.:;.
oo.,d"
Thesestresses act on a face having anarea(dy d;) and affectthe volume (dr dy d:); hence,we get for the net lorcesper unit volume in the directionsof the rc_.y_. and :-axes the respectivevalues 9%o 0x'
dz
: ^:i. .[,i].(,11 .':;) . (,';;: .::;)l
Up to this point, we havebeendiscussinsa medium in staticequilibrium.We shallno*..-ou.lthis restric_ tron and considerwhat happenswhen the stresses are not in equilibrium.In fig.2.2,we now assumethat the stresses on the rear faceof the elementof volumeare as shown in the diagram but that the stresseson the liont face are, respectively,
'.o', or.
, dtr,-_
: ^:: * ,*qu";. -'r] . *or";.
2.2.1 St'uhr v:uveequation
O o" d x , ox
(2.24)
dz
wherep is the density(assumedto be constant).Simi_ lar equationscan be written for the motion alons the y- and z-axes. Equation (2.24) relatesthe displacementsto the stresses. We can obtain an equationinvolvingonly dis_ placements by using Hooke's law to replace the stresses with strainsand then expressing the strainsin terms of the displacements, using eqs. (2.g), (2.9), ( 2 . 1 2 )(. 2 . 1 3 )a, n d ( 2 . 1 4 )T. h u s .
2.2Wave equations
o,. *
do,,
62w
A
A
: ( t r + *)o-+rV)r'.
:
;}A
p - " : ( r +p ) ' - * p V r r y .
(2.261 (2.271
dt"
To obtain the waveequation,we differentiatethese three equationswith respectto x, y, and z, respectively,and add the resultstogether.This gives i ) '( a u d r du lA2L a,A a,A\ + - \l : ( \ + P ) l + | 'P ^ , 1 " -+ 3: / dy ilr\dx \dr2 6y, 0:2|
+ -*v,F! + 9l + ar\ \ax
thatis,
,Yr,:: (r + 2p)V'A
oy
ozl'
THEORY OF SEISMIC WAVES
o'o, *19;u4: l
|
where
(2.28)
cr' : (\ + 2St")lp. ) By subtractingthe derivativeof eq. (2.26)with respectto z from the derivativeof eq.(2.27)with respect to y, we get
in two ways in general: (a) include in the wave equation terms that representthe forces generatingthe wavesor (b) surroundthe point of observationP by a closed surface 9 and regard the effect at P as being given by a volume integral throughout the interior of I to take into accountsourcesinsideg plus a surface integral over I to give the effectof sourcesoutsideI (see$2.2.4).To apply the first method, we note that eqs. (2.25),(2.26), and (2.27) are equivalentto Newton's secondlaw, and thesethree equationsare combined in eq. (2.31).Therefore,a sourcecan be taken into account by adding to the right-hand side of eq. (2.31)the term pF, where F is the externalnonelastic force per unit mass(often calledbodylbrce) that gives riseto the wavemotion. Thus,eq. (2.31)becomes
,#(:;-9:.,'(X-y), that is,
L a'e.: V2o. 9' ur' where
rr-(
p ; ; : (\ + p) VA + p V'( + pF.
(2.2e)
9'= p,lp.
Taking the divergenceand curl of eq.(2.34)and using e q .( 1 5 . 1 4a) n d p r o b l e m1 5 . 7g i v e s
^:orvrA+v.F, By subtractingappropriatederivatives,we obtain srmilar resultsfor 0,,and 0-. Equations(2.28) and (2.29) are differentexamplesof the waveequation,which we can write in the generalform I drU v2 af
= vr,lr.
(2'30)
where V is a constant. 2.2.2 Vectorwaveequation The waveequationcan also be obtained using vector methods. Equations (2.25), (2.26), and (2.21) are equivalentto the vectorvtaveequation: ^)y
(2.31)
dt"
If we take the divergenceof eq. (2.31) and use eqs. (2.12)and (15.14)we get eq. (2.28).Takingthe curl of eq. (2.31)and usingeq. (2.11)and problem 15.7gives the vector waveequationfor S-waves(see$2.4.1),
(2.32) which is equivalentto the three scalarequations, I'
A " 2"A,
p' at'
: v20,
1 i: x , y . _ - ) .
(2.33)
2.2.3 Waveequationincludingsourceterm The foregoing discussionof the wave equation has made no mention of the sourcesof the waves,and in fact, the equations discussedare only valid in a source-freeresion. Sourcescan be taken into account
(2.3s)
ar@ : B r v r o + v x F l 2 . at2
(2.36)
Theseequationsare difficult to solveas they stand. The solution is greatly simplifiedby using the Helmholtz separationmethod, which involves expressing both ( and F in terms of new scalarand vector functions.Thus.we write
(:v0+Vx1,
0-( p= : (I + p) VA + p"V'(.
(2.34)
oI-
F:VY+Vxq
V'x:0, V'O:0.
(2.31) (2.38)
Then, usingproblem 15.7,we obtain
.\:V'(=V'0. ) 20:rVx(=-V,x, l V.F=V:Y. I
VxF:-V2O.
(2.3e)
)
Substitutingin eqs.(2.35)and (2.36),we get
V , ( c , ' V , d + Y - #: r) ,
v ' ( e ' v ' x + o - #:)t Wheneverd, X, I or O contain powersof x, y, and z higher than the first, theseequationscan only be satisfied for all valuesof x, 1 and z if the expressions inside the parenthesesare identically zero at all points. Becausea linear function ofx, y, and z correspondsto a uniform translation and/or rotation of the medium, we can ignore this possibility and write (Savarensky, 1975:199)
a'0 : af
ctrVrd * Y,
(2.40)
WAVE EQUATIONS
a1 :
41
B' V'1+ o.
dt"
(2.41)
tainedidenticalresultsfor S-waves.Thus,the previous equationsrefer to either P- or S-waves.
2.2.4 Kirchhoff's theorem
2.2.5 Plane-wave solutions
Method (b) referredto in 92.2.3is in fact an extension of method (a). It uses the superposition concept (which followsfrom the linearity expressed in Hooke's law). We regard the wave motion at a point P as the superpositionof the wavesfrom all sourcesR within somevolumeV surroundingP plus the wavesradiated by points Q on the surfaceI surroundingthe volume (which takes into account any disturbances from sourcesoutside the volume). We adjust the times for thesesourcesso that their effectsall arrive at P at the sameinstant ln. We take Y(x, y, z, lo) in eq. (2.40) as the sourcedensity (body force/unit volume) inside g and specify6@, y, z, /o) lor eachpoint on the surface lf , t o, and to being the retardedtimes (tt)- rll), where Z is the velocity,and r is the distancebetweenP and the sourcesR or Q, that is, rlV is the time for the wave to travel from R or Q to P Thus, we specifythe wave n.rotionat different points at different times such that the wavesfrom all points arrive at P at the same instirnt /0. The result, known as Kirchhofl''stheorem(or fbrmula)(Ewing,Jardetzky, and Press,1957:l6), is
Let us consider first the case where r! is a function only ofx and /, so that eq. (2.30)reducesto
lndr,(.r', y,:.t,,): () r" IJI
I d,u_ a,{, ln Af
0x2
(2.4s)
Any function of (x - Vt),
* :jk
- v0,
(2.46)
is a solution of eq. (2.45)(seeproblem 2.5a)provided that r! and its first two derivativesare finite and continuous. This solution (known as d'Alembert's solution) furnishesan infinite number of particular solutions (for example, ek(\ vt\,sin (x - Vt), (r - V03, wherewe must excludepoints at which thesefunctrons and their first three derivativesceaseto exist or are discontinuous).The answerto a specificproblemconsistsof selectingthe appropriatecombinationof solutions that also satisfiesthe boundary conditions for the problem. A body waveis definedas a "disturbance"that travels through the medium and carries energy (Logan, 1987:230).In our notation,the disturbanceg is a volume changewhen rf : A and a rotation when I : 0,.Obviously,the disturbancein eq. (2.46)is traveling along the x-axis. We shall now show that it travels with a speedequalto the quantity Z In fig. 2.5athe certainpart ofthe wavehas reached point P,,at time to. If the coordinateof P,, is r,,, then the value of g at P,, is t,, : .f(xu- Vt(,).lf this same portion of the wavereachesP, at time /0 + Al, then we havefor the value of rf at P,
- to,a!"'t . JI{(;Xi;)t:il
. (i)[:l]].'
t) 4)\
rhere I is the outward-drawnunit normal, and the .quarebracketsdenotefunctionsevaluatedat point Q .,: tinle to: tu - rl V, [$l is often referredto as a re'.tnladpotential.lf we assumethat eachsourceemits ':.hericalwaves($2.2.6)of the form (l/r)e j,il(r/r,)(see -;s (2.55)and (2.56)),eq. (2.42)becomes(Savaren. , . r .1 9 7 52: 3 4 )
r;dr,(.r, !, :, t,,) :
(;)JII O*
.
,(243) lJ {,[:l] rorj,,!]av
(l/r)er.(lo-l/'r
:
But, becausethis is the sameportion of the wavethat was at Puat time lo, we must haverlr,,: r.!,,that is, xn - Vto: xn * Ax - V(to+ Lt). Thus, the quantity Izis equal to AxlAt and is therefore the speedwith which the disturbancetravels.The reciprocalof velocity,l/Z is calledslowness. A function of (rt+ Vt), for example,* : g(x + Vt), is alsoa solutionof eq. (2.45).It denotesa wavetraveling in the negativex-direction. The generalsolution o f e q .( 2 . 4 5 ) , - Vt) + g(x + Vt), S : l("x
':re in the integrand, ,)] :
V, :,/[ru * A,x V(to+ Lt)|.
€ejot0,
(:
(llr)e
:-,tv,
(2.44) : .'.'is the angularfrequency(seeg2.l.l). J:crrusewe startedfrom eq. (2.40),eqs.(2.42)Io - -.-' rrrevalid for P-waves(see$2.4.1).However,we : iust as well havestartedfrom eq. (2.41)and ob-
(2.41\
representstwo wavestravelingalong the x-axis in oppositedirectionswith velocityZ The quantity r + Vt (or a constanttimes theseexpressions;see$2.1.1)is the phase.The surfaceson which the wave motion is the same,that is, the surlaces on which the phase has the same value, are known as wavefronts.In the casewe are considering, '! is independentof y and;, and so the disturbanceis
THEORY OF SEISMIC WAVES
A1
the same everlrvhere on a plane perpendicular to the x-axis; the wavefront is therefore plane and the wave Note that the wave is travelingin the is a plane u.'cve. direction normal to the wavefront:this holds for all wavesin isotropicmedia.A line denotingthe direction of travel of the waveenergyis called a raypath. Plane waves are easier to visualize and to treat mathematicallythan more complicatedwaves.Moreover, curved wavefronts can be approximated as closelyas desiredby a superpositionof plane waves. It is convenientat times to havean expressionfor a plane wave traveling along a straight line inclined at an angle to each of the axes.Assumethat the wave is traveling along the x'-axis, which has direction cosines({, m, n) relativeto the -x-,y-, and :-axes (fig. 2.6).Then,at a point P on the,t'-axisat a distance-r' from the origin, we have
Fig. 2.5
lllustrating the velocity ofa wave
x':(xlmy*nz, wherethe coordinatesof P are (-t, l :). Then, q :.f((v t my * nz - v0 +g((xlmylnz
+ vt).
(2.48) (, : coso, m: cos02
2.2.6 Spherical-u,avesolut ions
a:coS0r
In additionto planewaves,we shallhaveoccasionto use another important type of wave, the spherical x,aye,where the wavefrontsare a seriesof concentric sphericalsurfaces.We expresseq. (2.30)in spherical coordinates(r e,6;, where0 is the colatitude,and $ the longitude(seeproblem2.6b). 1d2S: ,. dt2
(""'il) J, .,i, 'i[iI (":Y). a.fl. +
sinrOddrl
Fig. 1.6
W a v ed i r e c t i o n n o t a l o n g a n a x t s
Fig. 2.7
Relation between spherical and plane waves.
e.4s)
We consideronly the specialcasewhen the wavemotion is independentof 0 and $, henceis a function only of r and l. Then we get the simplifiedequation
'"':Y:,:i," (":Y)
(2.50)
A solutionof the foregoingequationis \ 1: ( t l r ) J Q - V t )
( 2 . 5)1
(seeeq. (2.46\).Obviously, ,11:(llr)g(r+Vt) is alsoa solutionand the generalsolutionofeq' (2.50) (seeproblem2.5c)is '$ : (llrV(r - Vi) + (1lr)g(r+ Vt),
(2.52)
in which the first term representsa wave expanding outward from a central point and the secondterm a wavecollapsingtoward the central point. When r and I are fixed, (r - Vtl is constant and hencerl is constant.Thus, at the instant l, the wave
has the samevalue at all points on the sphericalsurface of radius r The sphericalsurfacesare therefore wavefrontsand the radii are rays.Obviously,the rays
GENERAL ASPECTSOF WAVES
l a
+J
are normal to the wavefrontsas in the caseof plane rvaves.(This is not always the case in anisotropic media.) As the wave progressoutward from the center,the radius increasesby the amount Z during each unit of time. Eventually,the radius becomesvery large and the portion ofthe wavefrontnear any particular point rvifl be approximatelyplane.If we considerfig. 2.7, we seethat the error that we introduce when we replace the sphericalwavefront PQR by the plane wavefront P'QR' is due to the divergencebetweenthe true direction of propagationgiven by the direction of the radius and the assumeddirection normal to the plane. By taking OQ very large or PR very small (or both), we can make the error as small as desired.Because planewavesare easyto visualizeand also the simplest to handle mathematically,we generallyassumethat conditions are such that the plane-waveassumption is valid.
23 General aspects ofwaves 2.3.I Harmonicy'uves In $2.2.5and 2.2.6,we discussed the geometricalaspectsofwaves, that is, how they dependon the space We now considerthe time dependence coordinates. of wavemotion. The simplesttime variation that a wavecan havels lrurmonit(sinusoidal), equivalentto simpleharmonic motion.ln general,wavesaremorecomplexthan this, but the methodsof Fourieranalysis({i 15.2)allow us to representalmostany complexwaveas a superposition of harmonic waves.Harmonic waves,becauseof their simplicity,can be regardedas the time equivalent of plane wavesin space. Adding nl2 to the phasein eq. (2.3)changescosrne to sine. so harmonic wavescan be written in either form. Some of the commonest forms are the following: t : I cos [(2rrl\Xx - Vt)] : A cos ro' then specifyingthe displacementor pressureon this surface due to the source. Let us consider the case where the displacement u(r, t) is to be found, given the displacement uo(t) of the surfacer: rn.We let 6 : t (r ro)/I/and write
Note that the lower limit of the integral means that t : 0 is the instant at which the wavefirst reachesthe surfacero, uo(t)being zero beforethis. To carry the calculationfurther,we must know uo(/). Let us approximatean explosionby the expression uo(t) : ke-'l
: 0
o'dt J'Q):-rnve'"','!i,',uker'. rtrc- e ut). \vk 1s Vlru - a - r)l V We replaceI in this expressionby ( : t - (r and eq. (2.73)becomes rok dd : l' ,-'o'" - ee 's ulr. tl : Ar r(Vlrn - a) Lro
-Y-e-'u'u+!r-"r] r r l
( 0 , r = , r l e . l Z ) : 0 I
At r : rn, (: t and u(r,t) : uoQ),whereuo(t)depends on the specificsource:
I ?3:"
( ' , - , n , , -, o . , . ) . _..r,k , r(Vlro - a\ \r,, ,
(2.77) r ))
ro. (2.78)
the latter equationgiving the far-field solution. The fact that eqs. (2.77) ar,d (2.78) are valid only for ( > 0 (seeeq. (2.72))merely meansthat u(r, t) ts zero until t : (r - r^)ll\ that is, until the disturbance reachesthe point. At this instant, ( : 0 and u(n t) : k(rolr); hence the initial displacementis the same as that of the surface r0 except that it is reduced by the factor rJr, that is, u(n t) falls off inversely as the distance(see$2.7.1and eq. (2.109).Moreover,u:0 at / : - and also when (seeeq. (2.77)) V(llro - llr)e ltr'o+ (Vlr - a)e-'t : Q, that is. when t:
t -- t n " + V
V(r-r^) I ln Vlrn-a ror(a-Vlr)
SURFACE WAVES
49
Provided Vlro) a > Vlr, this equationhas a real positive root and u(r, l) will vanish, that is, the displacement must changesign. BecauseVlroislarge in practice and Vlr rapidly becomessmall, in general the unidirectionalpulsein eq. (2.76)givesrise to an oscillatory wave. By using different expressionsfor ao(l)in eq. (2.75) or by specifyingS|,,(t),the pressureat the cavity, we can investigatethe wave motion for various spherically symmetricalsources(seeBlake, 1952;Savarensky, 1975: 243-55). By finding the limit as a in eq. (2.76)goesto zero(seeproblem2.12),wegetthe result lor a unit step,step(r);then the resultsfor other inputs can be found using convolution techniques (see $r 5 . 4 .)l. 2.5 Surface waves 2.5.I General The waveequationsfor P- and S-wavesin terms of the potentialfunctionsof eq. (2.64)are V:S :
(l/ar) Ar{,ldtr,
YtX, : (118' ) l' yrl6t', YtXr:
(llBr) \ryrl6tr,
(p-wave)
componentsexist (S^F1-motion is parallel to the xyplane and so is not involved in the boundary conditions) and adjust their amplitudes to satisfy the boundary conditions. Appropriate potentialsare +
:
Ae
vn't,
Xt,
:
Be
neejKtx
vn),
(2.82) wherez and n must be real positiveconstantsso that the wave decreasesin amplitude away from the surface; V^ is, of course, the velocity of the Rayleigh wave.Substitutingg and 1,, in eqs.(2.79)and (2.80) glves m2 : (.1- V' ^la' ),
n' : (l - Vr-lgr).
(2.83)
Becausem and n are real, li < g < o, so that the velocity of the Rayleighwave is lessthan that of the S-wave. We next apply the boundary conditions.Using the resultsof problem2.1l, we get for : : 0
(2.19)
=trv:d* 2pflt - l'*-'):, I \r,:' dx d:l
a
{Strz-wave.;(2.80)
';_1,, : r : u(,o^:!o=ilr) J
f fZ.S+l
o.,,
(SI/-wave) (2.81)
wherethe S-wavepotential hasbeenreplacedwith the l'unctions1,. and XH correspondingto SZ- and Sl1components.If we considerplane wavestravelingin the directionof the -t-axisin an infinitehomogeneous medium,solutionsof theseequationsare of the form elx(\ ''t, V : o or B. However,othersolutionsarepossiblewhenthe infinitemediumis dividedinto different media.When the.r1-planeseparates two media,solutions of the form e'(:eiK(\ '?)existundercertainconditions. Thesesolutionscorrespondto plane waves travelingparallelto the,rr-axiswith velocity V and amplitude decreasingexponentiallywith distancefrom the ,ry-plane(in a semiinfinitemedium; see$2.5.2to 2.5.4). Such wavesare called sur/at'ewavesbecause theyare "tied" to the surfaceand diminishas they get farther from the surface.
mEe)K(\
Substitutingeq. (2.82)into the foregoingand setting : : 0 gives l(|t + 2p")m,- \ll
+ 2jnp"B: 0
and -2jmA + (n'+ l)B:
0.
We can useeqs.(2.58),(2.59),and (2.83)to write the first result in the form (2P'-
Vil'l + 21n$18: 0.
Eliminating the ratio BIA from the two equations gives l (2 - V]l$)(n2 + 11: 4*n; hence,
2.5.2 Ra"vleigh v,uves The most important surfacewavein explorationseismology is the Ra1'lr,ighv'ave,which is propagated along a free surfaceof a solid. Although a "free" surlbce means contact with a vacuum, the elastic constants and density of air are so low in comparison with valuesfor rocks that the surfaceof the earth is approximatelya free surface.Groundrol/ is the term commonly usedfor Rayleighwaves. We take the free surfaceas the x.y-planewith the :-axis positive downward. The boundary conditions (ti2.4.4)require that ct,": 0 : o,, at z : 0 (seeproblem 2. l0), that is, two conditions must be satisfied, and so we require two parameters that can be adjusted.Therefore,we assumethat both P- and SV-
vi-
89' Vi+ Q4 - l6B'la')$av] + l 6 ( B r l a ,- l ) p u : O .
(2.85)
Becausethe left side of eq. (2.85)is negativefor V^: 0 and positive for V*: +8, a real root must exist between thesetwo values,this root giving the Rayleigh wave velocity Z^. However,we cannot find this root without knowing p/ct. For many rocks, o - t/q, that is, (B/ct), - t/z from eq. (2.60).If we use this value, the three roots of eq. (2.85) are Vt*: 49r,2(l r l/.,F)82. Because V^lg must be lessthan unity, the only permissiblesolution IS
Vi:2(r - l/{3)8.,
or
V*: 0.9t99.
THEORY OF SEISMIC WAVES
50 W e n o w f i n d t h a t \ l a : 0 . 5 3 1l,n : 0 . 8 4 8n, : and BIA: +1.468j;hence, 0 yr:
:
0.393,
6r.
vRt)i, le-0.848K2 ejKtx 0 3 e 3 x ue j K ( r r R ' ) . l.468jAs
Using eq. (2.64),we get for the displacementsat the surface rRl). w : 0.620r B,.Thus, 9,> 4> 9,, and the S-wavevelocity must be higher in the deeper layer than in the surface layer, ( then being in between the two velocities. Becauser : 2nl\ : .14, as the frequency increasesfrom zero, tan r{h increasesand approaches infinity; thus for eq. (2.92) to hold, as the frequency increases,( must approach zero and If must approach its ( B,. Conversely,as K approacheszero, approaches maximum value and trfapproachesBr. Hence,at high frequencies, the Love-wave velocity approaches the velocity ofS-wavesin the surfacelayer,and as the frequency approacheszero, the Love-wave velocity approachesthe S-wavevelocity in the lower layer (Dobrin.1951).
SURFACE WAVES
)J
The expressionfor v, can be written v, : :
(Ae:*L' + Be iKLz)etk(x-vL' jKLz)ejK(xvLn A(ejKLz + ae
on using eq. (2.91).Therefore, v, : :
/(gi*tz
+
e-2jK{re-jK(z)ejK(x-
AlejKAd+h) 1
vLt)
g-jx((z+l)]gjx(x- th- vLt)
: 2Alcos r((z _r h)lst*e tn_vo
(2.93) Az
on taking the real part of the amplitude. We seethat vr vanisheson planeswhere r((z + h) : (r + ll2)r
I
(r integral) (2.94)
(recall that ft is positiveand z is negativein the upper fayer);theseplanesare callednodalplanes(see$2.I . I ). Nodal planesare characteristicof normal-modepropagation ($13.3)and indeed Love waves can be explainedin terms of normal-modepropagation(Grant : l-5). a n d W e s t .1 9 6 5 8 Fig. 2.18
2.5.5 Tubewaves Waves traveling in a fluid-filled borehole or on the walls of a borehole in the direction of the axis (tube waves)are of considerableinterestin velocity surveys in wells ($5.4.2),in vertical seismicprofiling ($13.4), and in sonic logging ($5.4.3). Because they have mainly only I degreeof freedom(along the axis),their amplitude decreasesslowly with distance.Sometimes severalmodesoftube wavesare presentand often the mechanismsof their generationand the natureof their motion are not clear. Tube waveshave the potential of furnishing infiormationabout the elasticproperties and permeabilityof the surroundingformations. Most tube-waveenergy travels axially, but radial motion is also involved in some modes. A pressure geophoneor one hanging freely in the borehole will sensethe maximum tube-waveeffectsin the borehole fluid, whereasa geophoneclamped to the borehole wall will sensemuch smallermotion. The classicaltube wave is merely a P-wavepropagating in the fluid, the borehole wall expandingand contractingas the pressurewavepasses.We assumea homogeneousfluid in a cylindrical boreholepenetratisotropicmedium (fig. 2.18).Using a homogeneous ing I for the pressureand lt for the displacement, Newton'ssecondlaw,net force : massX acceleration, applied to a volume element of the fluid, V : rr2 Az,is
uo;|. (1?^') trr:- -(prr'^') ag 0z
62w AP
F r o m e q .( 2 . 1 8 ) ,
8l : -kL:
-kAYl\ .
Changes involved in passageofa tube wave.
The changein volume A1/ is due to expansionboth along the axis and radially,that is, LY : rr2'! u * (2nru,)a,2, 0z wherea, is the changein the radius of the hole. Thus, we get
: -k (uo'; *'?) QP
(2.e6)
Lamb (1960:$157)derivedthe followingrelationbetweenu, and I for an annulusofinner and outer radii r and R, where c, o, and p are respectivelyYoung's modulus, Poisson'sratio, and the shear modulus for the annulusmaterial:
u, _0 (l + q)(Rl+ l) r
E
]o,'
R2-l
If we let R -r -, we obtain for a cylindrical hole in an infinite medium u,lr :0(l
+ o)lE:012p"
(usingproblem2.2).Substitutionin eq. (2.96)gives
ei lt ; *l \*_:/ - -0^w' dz
and substitution of this result in eq. (2.95)givesthe waveequation:
"n; : e)*,r 'r::(f * 1)' rzrr
White (1965: 153-6; 1983: 139-91) discussestube
(2.9s) ' *atuesin sreaterdetail. (1981)
discusstwo other tubeCheng and Toksoz wavemodes.One is a Stoneleywave($2.5.3)propagating along the boreholewall and dying awayexponentially in the formation surroundingthe borehole;this
THEORY OF SEISMIC WAVES
\4
is the dominant tube-wavemode in VSP work. The other tube-wave mode is pseudo-Rayleigh waves, guidedwaves($13.3)confinedlargelyto the fluid, also dying away exponentially in the surrounding formation. Both wavesare dispersive(52.7.4). Cheng and Toksozcalculateddispersioncurvesfor both modes(fig. 2.19a).The Stoneleywaveis slightly dispersivewith both group and phasevelocitiesclose to 0.9ct.,where o, is the P-wavevelocity in the borewavescanhole fluid (seeeq. (2.61)).Pseudo-Rayleigh not existbelow a minimum frequency(wherethetr velocity equals the S-wavevelocity of the surrounding rock, B,) and their group velocity passesthrough a minimum, which resultsin an Airy phase(see$13.3 and fig. 13.19).Severalmodes may exist (see eq. (13.1)).Pseudo-Rayleigh wavesare not a factor in ordinary seismicwork (fig. 2.19a showsa l0-kHz lowfrequencycutoff), but they are involvedin sonic logging. At higher frequencies,the velocitiesof both Stoneley and pseudo-Rayleighwaves approach the Swave velocity in the medium surrounding the borehole. "synthetic microCheng and Toksoz calculated one of which seismograms"for variouscircumstances, is shown in fig. 2.19b;fig. 2.19cshowsan observed waveform. Hardage(1985)discusses the role of tube wavestn VSP surveys.Figure 2.20a shows progradeelliptical motion in an axial plane.The radial motion is zero at the center of the hole and maximum at the borehole wall, where it is continuous(fig. 2.20b),but it decays rapidly in the surroundingformation. The axial component of motion is relativelyconstantin the fluid but is discontinuousat the boreholewall whereits amplitude decreases by a factor as largeas severalhundred. This explainswhy geophonesshould be clamped to the boreholewall. Tube wavesare reflectedat impedancechanges,just as other acousticwavesare ($3.2).When the borehole area changesfrom a, to a., the refleccross-sectional tion (R) and transmission(7n)coefficientsare (Hard a g e ,1 9 8 5 : 8 6 - 7 ) R-azQ2t
at, al
T:
2:,
(2.98)
a2+ el
(comparewith eqs.(3.14)and (3.15)).At the top of the borehole fluid and the bottom of the hole, R : - I and *1, respectively. Tube wavesare also reflected at a geophonesondeand wherecasingchanges.Figure 2.21 showsseveralreflectedtube waves. Tube wavescan be generatedby almost anything that disturbs the borehole fluid. The most common sourceis a Rayleighwave passingover the top of the borehole;thus, tute wavesare uncommon in maririe VSP surveysand, in land surveys,lowering the bprehole fluid level often lessenstube-wavegeneration. Tube wavesinitially have the same spectrum as the generatingsourceand their spectrumchangesslowly becausethereis little absorptionin the boreholefluid.
t
9 UJ
-- Phose -
Group
ieuoo- z> \ \ Royleigh
o Ld
N J
(r z
Sloneley'
ro
20
(kHz) FREQUENCY
ANISOTROPIC MEDIA
))
I OOIVNGONG TUBEI\IAVE
| ,.r,01,...0 BoR€HoLE
I
lA/\rAf
variation of seismic velocity with the direction in which it is measured or with wave polarization ($13.1.6).The generalelasticitymatrix relating stress o, to strain eo,(the generalizedform of the 6 X 6 matrix in eq. (2.I 5)) can contain at most 2l independent constants becauseof symmetry considerations,but Winterstein(1990: 1084-5)saysthat only l8 of these can be truly independent.The number of independent constants depends on the symmetry of the system (Love, 1944:99). A number of different types of symmetry (symmetry systems)can exist. Classically,eight systemsare defined (Love, loc. cit.; Landau and Lifshitz, 1986; Saada, 1974),but some writers define subsystemsas well; for example,Winterstein(1990:1083 5) lists ll systemsplus subsystemsin discussingcracks.Anisotropy typesare associatedwith the symmetrysystems. At seismicwavelengths,however,the only anisotropy types reported are transverseisotropy (hexagonal symmetry), orthorhombic anisotropy, and monoclinic anisotropy. Transverseisotropy involves elastic properties that are the samein any direction perpendicularto an axis but are different parallel to this axis. Two important types of transverseisotropy are observed;that with a nearly vertical symmetry axis (thin-layer anisotropy) and that with a nearly horizontal axis (azimuthalanisotropy)(Bush and Crampin, 1987).Transverseisotropy is the most important type of anisotropy encountered;it is discussedfurther in 92.6.2. Orthorhombicanisotropyis equivalent to a superposition of thin-layer anisotropy and azimuthal anisotropy. It arises becausea vertical fracture system has
ELASTICROCK MATERIAL PARTICLEMOTION
il1ffifi-l lvvr|/\r
l---
I I H A R D I IF O R M A T I O N
| 630 |620 r6to
6 4 2
IISOFTII FORMATTON
r650 I640
r q
sEcoN0s
to
DOUELE CASING
500 2 r/R (c)
rooo o u F
: l0 Wave motion for a tube wave. (From Hardage, 1985: -! ) (a) Prograde elliptical motion of fluid particles during .,ge of a tube wave (ellipticity is greater than shown here). r',ul and radial displacementsfor hard formation, v : 82 .,:d lc) lor soft formation.v : 74H2.
3 rsoo I I
o
2ooo
2 500
.:quently, tube wavesoften have appreciableenr the signalrangeevenafter considerabletravel.
A
CEMENI
\nisotropic media l. pes of anisotropy ' . ,,nl ls a generalterm denoting variation of a - .. propertydependingon the directionin which - :,rsured.Seismicanisotropy is evidencedby a
Fig.2.21 VSP record showing severaltube waves. Tube wave (1) is generatedat the baseofthe surfacecasing; (2) is generated at the surface by a Rayleigh wave; (3) is a reverberationofwave (2) betweenthe well sondeand the surface;and (4) is a reflection f r o m t h e b o t t o m o f t h e b o r e h o l e .( F r o m H a r d a g e . 1 9 8 5 : 8 8 . )
THEORY OF SEISMIC WAVES
56 been superimposedon a horizontally layeredsystem' VSP data from the Paris Basin have beeninterpreted using an orthorhombic model (Bush and Crampin. 1987;MacBeth, 1990).Layering anisotropyis usually much stronger than fracture anisotropy so that the overalleffectmay be difficult to distinguishfrom thinlayer anisotropy.Monoclinic anisotopy can be produced by superimposingtilted fractureson a layered medium (Schoenbergand Muir, 1989)' Examplesof monoclinic anisotropyhavebeenobservedin the field (Crampin, McGonigle, and Bamford, 1980; Wintersteinand Meadows,1990). The stress-strainrelationshipsrequire 5 independent elasticmoduli for transverseisotropy, 9 for orthorhombic anisotropy,and l3 for monoclinic anisotropy, comparedwith only 2 for the isotropiccase. 2.6.2 Transverseisotropy Taking the z-axisas the axis of symmetry,Love (1944'. 160-l) showedthat for transverseisotropy, Hooke's law reducesto the following: o., : (tr -F 2p )e,., * \,,".,r,* \re-,, (2.9e) o,,,.: \,,e.. + (\ + 2*)er,* I'.e--, o-- : \re., * \r€,,, + (\r + 2pt)",,,
o...: l-L€,,, I or-: p*8,.,, r o-, :
p*e-,,
(2.100)
(Crampin, l98l). For horizontal thin-layer refringence anisotropy, the two wavesare the 4SP-waves(that is, quasi-S-waveshaving displacementparallel to the symmetryaxis) and SR-waves(displacementin radial directions).For azimuthalasymmetry,they are sometimes called qSV- and Sl1-waves. In anisotropicmedia, pure S- and P-wavesmay exist only in certain directions.In transverselyisotropic media, SZ- and P-modesof propagationare coupled (see$2.6.3).Wavefrontsare not in generalorthogonal to the directionsof wave propagatton.Phasevelocity is velocity perpendicular to a surface of constant phase(a wavefront), and group velocity,the velocity with which the energytravels($2.7.4),is in a different direction (see fig. 2.23). The surfaces for SZwavefrontsmay havecusps. Anisotropy is often described by the fractional differencebetweenthe maximum and minimum velocities for a given wave surface,i.e., (V^ - V^^)|Z-^*, sometimesby the ratio of maximum and minimum velocities, V^ulV^-. Uhrig and van Melle (1955)give a table showing anisotropyvaluesof 1.2to 1.4for rocks at the surface at depthsof 2.1 to 2.4 km and 1.1to 1.2for sediments in west and central Texas.Stoep(1966)found average valuesbetween1.00and 1.03for TexasGulf Coast sediments.S6gonzacand Laherr6re (1959) obtained to 1.08to 1.12for valuesfrom 1.00for sandstones limestonesand l.l5 to 1.20for anhydritesfrom the northern Sahara.
)
wherethe five independentconstantsare \ and p., tr'r and p' and p*. Layering and parallel fracturing tend to produce transverseisotropy. A sequenceof isotropic layers (suchas sedimentarybedding)producesthin-layeranisotropy for wavelengthsappreciablylarger than the layer thicknesses(), > 8d where d is layer thickness; seeEbrom et al., 1990).The symmetryaxis is perpendicular to the beddingwith the velocitiesof P- and Swaves that involve motion parallel to the bedding larger than those involving motion perpendicularto the bedding. The velocity parallel to the bedding is greaterbecausethe higher-velocitymemberscarry the first energy,whereasfor wave motion perpendicular to the bedding, each member contributesin proportion to the time takento traverseit. Nonhorizontal fracturing and microcracksproduce azimuthal anisotropy with a symmetry axis perpendicular to the fracturing (fractures often are somewhat parallel and vertical).The velocity of wavesthat involvemotion parallel to the fracturing (S') is larger than that of waveswith motion perpendicularto the fracturing (S,). If the motion is neither parallel nor perpendiculaito the fracturing, an S-wavesplits into i*o *uu.t with orthogonal polarizations(fig. 2'22): one (S ) traveling at the S' velocity,the other (S') at the S, velocity; this is calledshear-wavesplitting ot bi-
isotropicmedia 2.6.3 Wuveequationfor transversely When media are not isotropic, the mathematicsbecome more complex the more anisotropic the medium. However,the case of a transverselyisotropic medium can be treated without great difficulty. We consider wavesin the rz-plane, where the symmetry axis is along the z-axis.Derivativeswith respectto y are zero, but S-wavesmay involve motion in the ydirection.We substituteeqs.(2.99)and (2.100)into eq. (2.24), and using eqs. (2.8) and (2.'7),we get the waveequationsfor transverselyisotropicmedia: 62u '3P
d o .' . + d o , " 0: 0x
a"'l : u [ , ^' + 2 '' t' a du x + ^ .' d : l + arL
. #)] i,[-.(::
.. 02w = (\ + 2pf p*91 + (r, * p ' ) ^dz; ,dx #,+ I A,, 6zv d:v P ^ , : l r t . , t F * . , . ' cJI'
( 2 .l 0 l ) (2.102)
d:-
dX'
31u rJ:N .d2w Par. : (\- + **) u" A, * F"a", * 32rt'
(\-+2P)
dz-
.
(2.l 03)
t
EFFECTS OF THE MEDIUM ON WAVE PROPAGATION
57
thesebecome (V2 - afi(' - o*znz)(A - (oi - o*' + g*')(t : 0, lV' B*2n2lnB (V2-a2rn2-o*zgz)nA + l V ' - ( o l - o * ' * 9 * ) n ' - 9 * z ( z l ( B: 0 . Eliminating A and B givesthe following quadratic equationin Z2: [Vt
- (oi - ct*2 + g'k2)(2- g*'rtln
(v, _ ul(, _
o*z4z)(
: _ V : _ ( o i _ o * , * 9*)n'- B*z(zl( Fig. 2.22 S-wave propagation in a lractured medium with cracks oriented N45"W For an S-wavetraveling parallel to fracturing, the velocity (Sr) is slower for a component involving motion perpendicular to the fracturing than for one involving motion parallel to the fracturing (velocity S,).
Note the dependence in eqs. (2.101)and (2.103)on derivativesof both u and w; P- and SZ-wavesare said to be coupled.The Sf/-wave governed by eq. (2.102) is, however,independentof the other two. We simplify the problem by assuminga plane wave travelingin the xz-planein the direction ofincreasing ,r and decreasing:,the anglebetweenthe raypathand the x-axis being 0. We now usethe potential functions of eq.(2.64)in the form d:ler-t.
1:fsr-i
where ( x - n z ) l V- t ,
g:
(:cos0.
n:sin0.
Then
,:4*lx dx
0z
: (;)u^
- nB)e:-t,
, : u Q - 4 = -(:,\r^ * (81s,-,' 6z
dx
Whenwe substitutetheseinto eqs.(2.101)and (2.103), the following factors appear in every term and hence can be ignored:jall\ (jor),, and ej-(.Equations(2.101) and (2.103)become lpV'( lpV'n lpV'n + [pV(
(L + 2p,)f3- (tr,+ 2p"*)h' lA - (\, + 2p - \, - p*)('n - p"*n3lB: 0, (\, * 2pr)r3 - (\,- + 2p,*)(' n]A + (p* - 2p",)(n2- p,*(3lB : 0.
c,*t : (\, + 2p,*)lp,
ctl : (}", + 2p,,)lp, F*' : l-r*/p,
a2,.n2_ d i 2 ( z ) n
or [V'-
( o i - c t * 2+ 9 * 2 ) ( ' - B * ' n z y
X (V2 -
o'rn' -
o*z(z)42
- p'l2c21 + lV' - (oi - o*' + g,*2)n2 x(V2 - ai(, - o*zrz1( : 0. (2.104) The solution hasbeengivenby Stoneley(1949),Grant and West (1965:42),and White (1965: 46).The roots are always real and positive and approach o and B of eqs. (2.58) and (2.59) as the anisotropy approaches zero. When the wave is traveling vertically, ( : 0, n : l, and V : ctr or B* for verticallytravelingP- or SI1waves.When ( : l, n : 0, V : o, or B*, corresponding to horizontally traveling P- or S/I-waves.However,when the wave is traveling at an angle to the vertical, the roots are complicatedfunctionsof the elastic constantsand the motion is not separatedinto distinct P- and S-waves. 2.7 Effects of the medium on wave propagation 2.7.1 Energy density and geometricalspreading Probably the single most important feature of any wave is the energyassociatedwith the motion of the medium as the wavepassesthrough it. Usually,we are not concernedwith the total energy of a wave but rather with the energy in the vicinity of the point where we observe it; the energydensity is the energy per unit volume. Consider a sphericalharmonic P-wave for which the radial displacementfor a fixed value of r is given Dy u:
Writing ai : (\, + 2p.,)lp,
(V2 -
A c o s( o t * ^ y ) ,
where 1 is a phase angle. The displacement r'tranges flrom -A to *A. Becausedisplacementvaries with time, each element of the medium has a velocity, ,i :
THEORY OF SEISMIC WAVES
58
Wavefront at time I + al
Wavelront at lime t Fast direction
Slor/ direction
I Wlocity function
(b)
(a)
(c) Fig.2.23 Wavefrontsin anisotropicmedia (a) Applicationot' Uuygens'principleto an anisotropicmediumillustratesdirectionind magnitud.diff...n..t betweenphaseand groupvelocities.(b) FerLat'sprincipleappliedto a reflectionfor a coincident sourceand receivershowsthat a reflectionmay not occur at a right angleto the reflector.(c) Sl/-wavefronts(surfacesof
6ul0t, andan associatedkinetic energy.The kinetic energy 6Eo contained within each element of volume 6.1/is EQ : l{PEl/)r;" The kinetic energyper unit volume is 6.E,,
#:
, .r * or t u ': l o o ." A' sin' ( 1;'
This expressionvaries from zero to a maximum of ipaltA'. The wave also involves potential energy resulting from the elasticstrainscreatedduring the passageof the wave. As the medium oscillatesback and forth'
isotroptcmeconstantphasefor a point source)in transversely are not ellipdia are eliiptical;however,P- and Sl/-wavefronts axis of vertical with V,. Vn) instances. special in excepi tical ,y-rn.try. Z. is group velocity as a function of the anglewith the symmetrYaxts
the energyis convertedback and forth from.kinetrcto potentia'i forms, the total energy remaining fixed' iWh.n u particle is at zero displacement,the potential energyii zero and the kinetic energyis a maximum' and;hen the particle is at its extremedisplacement' the enersv is all potential. Becausethe total energy - e'iuals ti'e maximum value of the kinetic energy,the , .n.tgy density E for a harmonic wave is E:
r o t r 2 A 2- 2 n z p v 24 2 .
).'
(2.l0s)
Thus, we seethat the energy density is proportional to the first power of the densityof the medium and to it. ,..orrd^power of the frequencyand amplitude of the wave.(SeeBraddick, 1965,for a different derivation of eq. (2.105).)
EFFECTS OF THE MEDIUM ON WAVE PROPAGATION
59
We are also interestedin the rate of flow of energy and we define the intensity as the quantity of energy that flows through a unit areanormal to the direction of wave propagationin unit time. Take a cylinder of infinitesimal cross-section,69, whose axis is parallel to the direction of propagationand whose length is equal to the distancetraveledin the time, Et. The total energyinsidethe cylinder at any instant t is EV 6t 6g: at time I + Er all of this energyhas left the cylinder through one of the ends.Dividing by the area of the end of the cylinder,Eg, and by the time interval, 61, we get 1, the amount of energypassingthrough unit area in unit time: r : EV
(2.106)
Fig.2.24
Dependence of intensity upon distance.
For a harmonic wave,this becomes t :
)pVarA,
: )qzp/y2[2.
(2.101)
In fig. 2.24, we show a sphericalwavefrontdiverging from a center O. By drawing sufficientradii, we can definetwo portions of wavefronts,g, and gr, of radii r,''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''and rr, such that the energy that fows outward through the spherical cap 9, in I second must be equal to that passingoutward through the spherical cap 9, in 1 second(becausethe energyis moving only in the radial direction).The flow ofenergy per second is the product of the intensity and the area;hence, I,9r:
1r9..
Becausethe areas9, and g, are proportional to the squareof their radii, we get I./I, : 9 r19. : (r,lrrl2. Moreover,it follows from eq. (2.106)that E is proportional to 1 and hence [,11,: ErlE,= (r,lrrl2.
(2.108)
Thus, geometricalspreadingcausesthe intensity and the energydensity of sphericalwavesto decreasernverselyas the squareof the distancefrom the source (Newman, 1973).This is calledsphericaldivergence. For a plane wave,the raysdo not divergeand hence the intensity of a plane wave is constant.Figure 2.24 could representa cross-sectionof a cylindrical wave, that is, a wavegeneratedby a very long linear source, arcs 9, and 9. being cylindrical wavefronts.Because the arcsare proportional to the radii, cylindricaldivercausesthe intensity to vary inverselyas the ra.qer?ce dius. Thus, we can write Irl I, : ErlE, : (rrlrr)-,
(2.l 0e)
nherem : 0, I, or 2 accordingas the waveis plane, e rl i n d r i c a lo. r s p h e r i c a l . Ratios of intensity,energy,or power are usually expressedin decibels,the value in dB being 10 log,oof the intensity, energy,or power ratio. Becausethese \ ary as the squareof the amplitude,dB is also given rs 20 log,oof the amplitude ratio. The natural log of rhe amplitude ratio (in nepers)is also used(seeprob. e m2 . 1 7 ) .
The foregoing assumesconstant velocity, whereas velocity usuallyincreaseswith depth, producingmore rapid spreading.A factor of Vlt is often used (99.8), where Z, is the stacking velocity ($5.4.1).The term "spherical divergence"is still used in this situation eventhough wavefrontsmay not be spherical. 2.7.2 Absorption (a) General. In the precedingsection,we considered variationsof the energydistribution as a function of geometry.Implicit in the discussionwas the assumption that none of the wave energy was transformed into other forms. In reality,as the wavemotion passes through the medium, the elastic energy associated with the wavemotion is graduallyabsorbedby the medium, reappearingultimatelyin the form of heat.This processis called ab.sorption and is responiiblefor the eventualcompletedisappearanceof the wavemotion (seealso 96.5).Toksozand Johnston(1981)summarize much of the literatureregardingabsorption. The measurementof absorption is very difficult, mainly becauseit is not easy to isolate absorption from other effectsmaking up attenuation(see$6.5.2). Moreoveq absorption varies with frequency,so that it is not clear how laboratory measurementsapply to seismicwavetravel in the earth. (b) Expressionsfor absorption. The decreaseofamplitude due to absorption appearsto be exponential with distancefor elasticwavesin rocks.Thus, we can write for the decreasein amplitude becauseof absorption A:
A o e\ , ,
(2.110)
whereI atd Aoarevaluesof the amplitudesof a plane wavefront at two pojhts a distance x apart, and 1 is the absorptioncofficient. Other measuresof absorptionare basedon the decreasein amplitude with time; to relatetheseto n. we assumea cyclic waveform: A : Aoe t" cos 2rvt,
(2.ttt)
and make measurements at a fixed location;ft is called
THEORY OF SEISMIC WAVES
60 lhe dampingfactor. The logarithmicdecrement(log dec) E is defined by
u: 'n(u,no,,,XTJl'i;t1. ,**) etn) It can be expressedin terms of the damping factor as 6:
hT : hlv : 2Thla,
(2.r13)
where Z is the period; 6 is measuredin nepers.Quality factor Q can be definedas Q : 2rl(fraction of energylost per cycle)
:2r(ElLE,
(2.1t4)
where AZ'is energy loss. Becauseenergy is proporand AEIEo: tional to amplitudesquared,f, : Eos-znt 2h Lt. SettingA,t : T we getLEIE,: 2hT: 2E and Q:
dhT:
t/6.
(2.lls)
If n is the number of oscillationsfor the amplitude to decreaseby the factor e, then eh'r : e, n: llhT and Q:
(2.116)
nr.
Stilf another manner of expressingQ is Q : cot 0, where $ is the lossangle. During one period, a wave travelsone wavelength so that if the loss of energyis due to absorptiononly, ( f r o m e q s .( 2 . 1 1 0 ) f a c t o ri s h T : 1 \ the attenuation and (2.1Il)), and we can interrelate11,6, and Q. (2.117) Q: nln),: al2\V : d6. Absorptionin the form givenby eq.Q.ll0) appears naturally in solutionsof the type given in eq. (2.56)if we permit the elastic constantsto be complex numbers.Real elasticconstantvaluescorrespondto media without absorption and complex values imply exponential absorption.Complex valuesof tr and p result in complexvelocityvalues(seeeqs.(2.58)and (2.59)). lf the llV in eq. (2.56)is replacedwith llV + jl/ e, (seefig. 2.29) in the form F r g . 2 . 2 7 I l l u s t r a t i n ge q . ( 2 .I l 9 ) .
same as those between the interface and the wave_ tionts in isotropic media. The laws of reflectionand refractioncan be combinedin the singlestatement:at an interface,the quantityp : (sin 0,)lV hasthe same value for the incident, reflected,and reiractedwaves. The quantity p is called the raypathparumeter lt will be shownin $3.l.l that Snell'slaw alsoholdsfor wave conversionfrom p- to S-waves(and vice versa)uDon reflection or refraction. The generalized form of Snell'slaw (eq.(3.1))will be undersroodin futureref_ 3rencesto Snell'slaw. When the mediumconsistsof a numberof parallel reds,Snell'slaw requiresthat the quantityp havethe )ame value everywherefor all reflectedand refracted :al's resultingfrom a given initial ray. The loregoingderivationassumeda planar surface .rnd therefore specular reflection. If the surface in_ ;ludes bumps of height d, reffectedwavesfrom them .rill be aheadof those from the rest of the surfaceby lil Thesecan be neglectedwhere2dl>\;* _];
qr5
F!
ra 9ca
S h
N j
r
",x ;.= ?9 d
\
^
^
{i
.
t
i
.
- + - S c - r o - ' ' ^ + -8. -t -Y
O
>
^
-'
- -
d
4.
l
'E
(
a
F1
.J 5.
V n ng.'i."lU,the reflectionpoint R has moved updip by fR": AL. To determine AI, we find the coordinut.t 1"0,zo)and 6r, z,l of points P and. R-.Because ( ur it'putiit"l to 51' xo is s h'(' and zois.h'n' and sourcethe 2s and S'I, n being direction cosines of joing.optto'* distance.lf (x' z) is a point on the line ing l and G we must have
2' - ! :21!J]
\a
9.20)
: 1r,
hn
where k is a parameterthat fixes the location of the point (x, z) albng,IG To get k' we use the fact that IG
\-d
\a-
-
\ --
\-io
\'
- - - - t\
Fig. 4.8 Determining dip and strike from nonperpendicular O ob"r".uations. (a) Relaiion between the point of observation (b) ExO) from updip (l always is and the reflecting point,4 ample of a graPhical solution.
VERTICAL VELOCITY GRADIENT AND RAYPATH CURVATURE cuts the reflector at R, so (x, z) must satisfy the equation ofthe reflectingplane (seeproblem 15.9b): -(x*nz:h.
9l
changesfrom one velocity function to another do not necessarilyimpose a seriousburden upon the interpreter.
Substitutingthe previousvaluesfor (x, z), we get -(l2s - k(hc + s)l + n(khn) : ft,
4.2.2 Equivalentaveragevelocity
that is, k: (h + 2k)l(h + (s) : (h + 2h)lh'. Therefore, the coordinatesof R are (seeproblem 4. I l). x, - 2s - k(h( + s) : 2s - (h( + s)(lr + 2k)lh' : xo - (n2s2lh' (4.21a) , and k(hn) : (h + 2(s)(hn)lh': zu - (,2ns2lh'.
z,:
(4.21b) Finally, (AL)'
("0 -
:
x,), * (zo - z,)2 (s2lh')2((2n4 + (4n2)
:
(s2lh')2((2n2),
:
and 67 : (s' lh')sin{ cos g : (s,l2h')sin2f. G'2Ic\ If we wish to stackdata elementsthat havethe common reflectionpoint R, we have to stack updip from the midpoint by the distanceAx, where Ax : Atlcos 6 : (srlft,)sin{.
(4.22a)
The updip offsetAx changesthe zero-offsettime by A,t : 2 A,x sin llV : 2(s2lh,Z)sinr(. (4.22b) The DMO (dip moveout)correction(99.10.2) accommodatesthis updip movementof the reflectingpoint as offsetincreases. 4.2 Vertical velocity gradient and raypath curvature 4.2.1 Efec't of velocityvariation The assumptionof constant velocity is not valid in general,the velocity usually changingas we go from one point to another.In petroleumexploration,we are usually dealing with more or less flat-tying bedding and the changesin seismicvelocity as we move horizontally are for the most part small, being the result of slowchangesin densityand elasticpropertiesof the beds.Thesehorizontal variationsare generallymuch lessrapid than the variationsin the vertical direction wherewe are going from bed to bed with consequent lithological changesand increasingpressurewith increasingdepth. Becausethe horizontal changesare gradual, they can often be taken into account by dividing the surveyarea into smallerareaswithin each ofwhich the horizontal variationscan be ignoredand the same vertical velocity distribution used. Such areasare often large enough to include severalstructures of the size of interest in oil exploration so that
Vertical variations in velocity can be taken into account in various ways.One of the simplestis to use a modification of the constant-velocitymodel. We assumethat the actual sectionexistingbetweenthe surface and a certain reflectinghorizon can be replaced with an equivalentsinglelayer of constantvelocity 7 equal to the averagevelocity betweenthe surfaceand the reflectinghorizon; 7 is the equivalentaveragevelocity. This velocity is usually given as a function of depth (or of tu,which is nearly the sameexceptwhen the dip is large).Thus, the sectionis assigneda different constant velocity for each of the reflectorsbelow it. Despitethis inconsistency, the method is usefuland is extensivelyapplied.The variation ofthe averagevelocity with /,, is found using one of the methods describedin $5.4.For the observedvaluesof the arrival time to,we selectthe averagevelocityTcorresponding to this reflector; using the values of lo, the dip moveout, LtulL,x, and \ we calculatethe depth ft and the dip ( usingeqs.(4.3)and (4.I 1).
4.2.3 Velocitylayering When the velocityis constant,eq. (4.l) showsthat a graph of tr versusrr is a straight line with slopellV2. Ifthe velocityvariesin the verticaldirection,raypaths will bendas requiredby Snell'slaw (eq.(3.1)).A commonly used method to take into account vertical velocity variationsis to replacethe actualvelocitydistribution with a number of horizontal layersof different velocities, the velocity being constant within each layer. We can approximate any vertical velocity changesas closelyas desiredby using enough layers. A graphical method using a wavefront chart can be usedto find the depth and dip ofa reflectinginterface; the preparation and use of these charts will be disc u s s e di n 9 8 . 8 . 3 . In effect,we replaceactual raypathswith a seriesof line segmentsthat are straight within each layer but undergoabrupt changesin direction at the boundaries between layers. Larger portions of travelpaths are spent in the higher-velocity layers as the sourcegeophonedistanceincreases. The resultis that a graph of /2versus,r' is slightlycurved,as shownin fig. 4. l0b. Dix (1955) showedthat eq. (4.4) can still be used exceptthat the slope ofthe :r2 t2curve at x : 0 yields the inverseof the rms velocity squared,llV,2^".Weapproximate the x2-t2 curve by the straight line
t' :x2lV!^"+tfi; hence,
dtldx : xlVl^, t.
(4.23)
G E O M E T R Y O F S E I S M I C WAVES
92
- S + S +
S,G
s
G
ilrvr
(a) Fig. 4.9 Loci of reflection points for various dips. (a) Coincident source and geophone; (b) geophone offset from source.
The angleof approach,l' is given by
sini, : n,'dx + : :L V,'*,t
g'24)
using eq. (4.23). Also, writing A/, for the vertical traveltime through the ith bed, and, becausex ts small. we have
jx : : =
Ax, * Ax, : hrtan i, + h2tan v, Lt, sin l, * v, Lt.,sin i, i,lV, (4 Lt, + Vl L,tr)sin + Ltr)(x.lvh"t) (V1 Lt, Vl
from eq. (4.24) (note that x cancels here becausewe haveasiumedit to be small).Becauset - 2(L't, + Alr)' we get
i ,,o,. i't
'Vr2m s:
i
e
It
This equationcan be generalizedfor r horizontal beds (Dix, 1955),giving lz
v2
-
v 2
-+ v2
r.,
(4.2s)
(4.26)
Shah and Levin (1973)give higher-orderapproximations necessaryto get more accuracy for large values of x. Fig. 4.10 Derivation of the formula for x2-t2velocity in twolayermedium.(a) Reflectionpath. (b) xt-l2 curve(the curvature The reciprocalof the slope of the dashedline is exaggerated). (tangentto the curve at x : 0) givesthe rms velocity'The bestfit stiaight line for someportion of the curve is what is often *ru.r.tid; the slopeof this line (showndashed)is the reciprocal "stackingvelocity" of the squareof the % ($5.a.aa);it depends on the portion beingfit.
4.2.4 Effect ofvariable velocity on raypath direction Changesin the direction of rays at interfaces are determiied by Snell'slaw (eq. (3.1)).For planar parallel layering (fig. a.ll), the angle of emergencefrom a tayer equatsthe angle ofentry into the next layer and
V E R T I C A L V E L O C I T Y G R A D I E N T A N D RAYPATH CURVATURE the raypath parameter p : (sin i)lV : (sin i)lVo : ArlAx (seeeq. (4.13a))specifiesray direction,'thai is, p is constant along any ray and is fixed by the direction in which the ray left the source.Note that l/Z is the slownessandp is the component of slownessparallel to the interface,hence,the componentof slowness parallel to the interface is constant for each ray. In earthquakestudies,it is often assumedthat the earth is divided into concentric sphericalshells(layers) of constant velocity, as in fig. 4.12. In this case, the angleofentry into a layeris not equalto the angle of exit from that layer, that is, i, * it. However. becauseOP : r, sin r, : r. sin i!. uiing Snells law shows that (r, sin ir)lVr: (r, sin r.)/2,. Thus, in this case, direction can be specifiedby a raypath parameterp,.. p' : (t"sin i")|V".
4
dz
V:
I t a ni d z , I
I
t:
l
lz
l" I
PVdz
- lPvz'1trz' l. [t
-u'1"':o'""' t : l"'.o l, ;'1."r,'-oi,,r, ),"
: j f"o, ro- cost),
,:tl'
a ),"u(l -
(4.31)
. : l r -n f + ( l u-
u2)tt2 a
[l
ll'
u,1trzjl,
:;,'lffi(H3;1 :''"
tan ! i. 2 l tt,|r):
(4.32)
P:[l+(x')213/2lx',
(4.28)
,/ cos I g
where
z
J .z . o r , - - '
hence, -r ' :
.:
The parametric equations(4.31) and (4.34) give the coordinates x and z, the parameter i being related to the one-waytraveltimer by eq. (4.32)or (4.33). The raypath given by eqs. (4.31) and (4.34) is a circle; this can be shown by calculatingthe radius of curvature p, which turns out to be a constant:
V(z),
FZ
x:
V:Vo*az, where Voisthe velocity at the horizontal datum plane, Z is the velocity at a depth z below the datum plane, and a is a constant whosevalue is generallybetween 0.3/sand 1.3/s. If we introducea new variableu : pV : sin r, then du : p dV : pa dz, and we can solvefor x and t as follows (p is the raypath parameter):
i : 2 tan t(e. tan jil, (4.33) : z (V V)la: (sin i sin io)lpa. (4.34)
In the limit when n becomesinfinite, we get
dz
Sometimeswe can expressZas a continuousfunction of z and integrateeqs.(4.29)and (4.30).One caseof considerableimportanceis that of a linear increaseof velocity with depth, namely,
4 = 1Q),
A,x, : Az, tan i,, Lz' At,: \cos i,'
-:t3fl/.
4.2.5 Linear increaseof velocity with depth
hence,
: sin ro _ , V o r '
sini_sinro:, V V o r ' dx dt -
(4.30)
- (Pv7'1"'
BecauseZ is a function of z, eqs.(4.29) and (4.30) furnish two integral equationsrelatingx and r to the depth z. Theseequationscan be solvedby numerical methods when we have a table of values of Z at various depths.
(4.27)
At times,the assumptionis made that the velocity varies in a systematiccontinuousmanner and there_ fore can be representedby a velocity function. The actual.velocity usually varies extremelyrapidly over short intervals,as shown by sonic logs (see $5.a.3); however,if we integratethesechangesover distances of a wavelengthor so (30-100 m), we obtain a func_ tion that is generallysmoothexceptfor discontinuities at marked lithological changes.If the velocity discon_ tinuities are small, we are often able to representthe velocity distribution with sufficient accuracy by a smoothvelocityfunction. The path of a wavetraveling in such a medium is then determinedby two integral equations. To derivethe equations,we assumethat the medium is divided into a large number of thin bedsin each of which the velocity is constant;on letting the number of beds go to infinity, the thicknessof each bed becomes infinitesimal and the velocity distribution be_ comes a continuous function of depth. Referring to fig. 4. I l, we havefor the nth bed srl_L
,:|;,
93
(4.2e)
, :d x tan i, using eqs.(4.31) and (4.34), i: ,, d2x d. .di dl x : ;.: ;.(tanr). : sec,i oz. o, dz dz : pa sec2i,using eq. (4.34). f
94
GEOMETRY OF SEISMIC WAVES
s
F-'"--l l
\
Hence,
l
( I + tan2i)r/2 | "f I = : l lV^\ .:constant. pasec't pa \4/slnro
l
\
r
t
t
l
- - - F - J \
Fig.4.1I
l
Raypathwherevelocityvarieswith depth.
Figure 4.13 shows a ray leaving the source at the angle lo. The center, O of the circular ray lies above the surface a distance p sin io, that is, Vola. Because this is independentof io,the centersof all rays lie on the samehorizontal line. This line is locatedwherethe velocity would be zero if the velocity function were extrapolatedup into the air (becausez : -Vola at this elevation). To determinethe shapeof the wavefront,we make use of fig. 4. 14.The raypathsSl and S.Bare circular arcs with centersO, and O, respectively.If we continue the arcs upwardsto meet the vertical through S at point S', line O, O, bisectsS'S at right angles.Next, we selectany point C on the downward extensionof S'S and draw the tangentsto the two arcs, CA and C.B.From plane geometry,we know that the squareof the length of a tangent to a circle from an external point (fiorexample,CA' ) is equal to the product of the two segmentsof any chord drawn from the samepoint (CS. C,S'in fig.4.14).Using both circles,we seethat CS' CS' : CA2: CB2, hence, CA : C,B.Thus, a circle with center C and radius R : C,4 cuts the two raypathsat right angles. Because,Sl and S.Bcan be any raypaths and a wavefront is a surfacethat meetsall rays at right angles, the circle with center C must be the wavefront that
Fig. 4.12 Seismicray in a sphericallylayeredearth with construction to show the geometricsignificanceof the ray parameter.
Fig. 4.13
Circular ray leaving the source at the angle L.
Fig. 4.14 Construction of wavefronts and raypaths for linear increase of velocity.
REFRACTION PATHS passesthrough A and,B.Even though arc SA is longer than S4 the greater path length is exactly compensatedfor by the higher velocity at the greaterdepth of raypath sl. We can draw the wavefront for any value of r if we can obtain the valuesof 11 and R in fig. 4.14. Thus, the quantities .F1and R are equal to the values of ; and x for a ray that has i : ]r at time r, that is, SD in 'crf the diagram. Substitution i: jn in eqs. (4.31), (4.33),and (4.34)yields tan)io: s '', sin lo : sechct, cos r0 : tanh at, H : (llpa)(l - sin io) : (Vola)l(llsini) - 1l : (Z/a)(coshat - l), (4.35) R : (llpa)cos io: (Vola)cotio : (Vola)sinhat. (4.35) Equation showsthat the centerof the wavefront moves downward and the radius becomeslarger as time increases. Field measurementsyield valuesof the arrival time at the source/oand angleofapproach ArlAx. Because the ray that returns to the sourcepointmust have encountereda reflectinghorizon normal to the raypath and retracedits path back to the point of origin, the dip is equal to angle i, at time t : t"tn.Thus,to locate the segmentof reflectinghorizon cbrrespondingto a set of valuesof t,, and AllAx, we make the following calculations: (a) , : )ro,
95 of the overlying bed so that it never carries a head w a v e( s e e$ l 1 . 2 ) . 4.3.2 Singlehorizontal refractor For the caseof a singlehorizontal refractinghorizon, we can readily derivea formula expressingthe arrival time in terms of the offset, the depth, and the velocities. In fig. 4.15, the lower part shows a horizontal plane refractor separatingtwo beds of velocities Z, and V2,whereVr) V,.For a geophoneat R, the path of the refractedwave is OMPR, 0. being the critical angle.The traveltime/ can be written
t :
OM
+
MP , P R 1-
Vt
vt
V2
: \- f! !?"s. + v2
_x T V2
MP v2
-f
^OM vl
z
2h "Z, cos0,
2h l r r- 4 r i n e'I \ tr/,cos 0 \ V,
x
2hcos0
V2
Vl
(4.36)
wherewe haveusedthe relation sin 0. = V,IV.inthe last step.This equationcan also be wiitten t : (xl Vr) -t t,,
(4.37)
where t,:
(2hcos0,)/2,,
(4.38)
(b)io:,'"-'(n.i,i), (c) j, : 2 tan-t(s"' tan
;,0), (d) H :(V/a)(cosh at * l), (e) R: (Vola)sinhat. With thesevalues,we find C lay off the radius R at the angle i,, and draw the reflectingsegmentperpendicular to the radius, as shown at the point A in fig. 4.14.This method is easilyadaptedto a simpleplotting machine (Daly, 1948) or to wavefront charts (Agocs,1950). Refractionstudiesinvolvinglinear increaseofoverburden velocity are discussedin 94.3.6. 43 Refraction paths 1.3.1General Refraction seismology involves the study of head waves($3.5)using primarily first arrivals,the equivalent of first breaksin reflectionseismology(see,however,secondarrivals,$11.2).For a head wave to be generated,the velocity below an interface must be higherthan that aboveit; accordingly,we shallassume rn the following sectionsthat the velocity increases downwardmonotonically.However,this is not always thecase,and problemssometimesresultfrom a hidden thlind) zone,a layer whosevelocity is lower than that
h :
) V , t , l c o s0 , .
Obviously,the head wave will not be observedat offsetslessthan the critical distance,OQ in fig. 4.15, writing x' for the critical distance, x' : OQ: 2htan0.: 2htan[sin | (V1lVr)) : 2h[(VrlV,)2 -
lfi/2.
(4.39)
The relation betweenx'lh and V.lV, is shown in fig. 4.16.As the ratio VrlV,increases, x'decreases.When VrlV, equals1.4,x' is equal to 2h. As a rule of thumb, offsetsshould be greaterthan twice the depth to the refractor to observerefractionswithout undue interferencefrom shallowerhead waves. Equations(4.36)and (4.37)representa straighrline of sfope llV, and intercepttime tr This is illustrated in fig. 4.15, where OMQ, OMP'R', OMPR, and OMP'R' are a seriesof refractionpathsand DWS the corresponding time-distance curve. Note that this straight-lineequationdoesnot havephysicalmeaning for offsetslessthan r' becausethe refractedwavedoes not exist for such values of x,' nevertheless, we can project the line back to the time axis to find r,. The problem to be solved usually is to find the depth h and the two velocities V, and Vr. The slope of the direct-wavetime-distancecurve is the reciprocal of V, and the same measurement for the refraction eventgives V,We can then calculatethe critical angle
96
GEOMETRY OF SEISMIC WAVES
0. from the relation 0" : sin-t (VtlV), and use the intercepttime, t,, to calculateft from eq. (4.38). In fig.4.15, the time-distancecurvesfor the reflection from the interface AP" and for the direct path are representedby the hyperbola CDE and the straight line OF, respectively.Becausethe path OMQ can be regarded either as a reflection or as the beginning of the refracted wave,the reflection and refraction timedistancecurves must coincide at x : x', that is, at point D. Moreover,differentiatingeq. (4.1) to obtain the slope of the reflection time-distance curve at x : x', we find
fa,l:["]
l a " J" =.,|,q i l , -'
:L(_o2
part of the refraction path is traversedat velocity V, so that as x increases,eventually the refraction wave will overtakethe direct wave. In fig. 4.15, these two traveltimes are equal at the point W lf the offset correspondingto W is r., we have
Vt
We see. therefore. that the reflection and refraction curves have the same slope at D, and, consequently, the refraction curve is tangent to the reflection curve atx:x'. Comparing reflected and refracted waves from the samehorizon arriving at the samegeophone,we note that the refraction arrival time is always lessthan the reflection arrival time (except at D). The intercept time /, for the refraction is lessthan the arrival time /o for the reflectionat the sourcepointbecause t, : (2hlVr)cos0,,
to: 2hlV,;
hence,/, < lo. Starting at the point Q, we seethat the direct wave arrivesaheadof the reflectedand refractedwavesbecauseits path is the shortestof the three. However,
2h
Vt
V2
z
cosu.,
=:('';,'') o+,,,,,, =t(ffi,1'"
\
V2
Y
, r : t l- ,L,)I *' r,
(4.40)
v,\oM + M el
= l s l n 0 : -l
Y
This relation is sometimesused to find ft from measurementsof the velocities and the crossoverdistance x.. However,usually we can determinetr more accurately than x. and henceeq. (4.38) providesa better method of determiningh. The relation between4ift and VrlV, is shown in fig. 4.16. 4.3.3 Severalhorizontal refractors Whereall layersare horizontal,eq. (4.36)an be generalized to cover the caseof more than one refracting horizon. Considerthe situation in fig. 4.17, wherewe have three layersof velocities,V,, V, and Zr. Whenever Vr) V,we havethe refraction path OMPRand corresponding time-distance curve I4/g just as we had in fig.4.15.If Vr) Vr) V,,travelby a refraction path in V, will eventually overtake the refraction in V, The refraction paths such as OM' M" P" P' R' are fixed by Snell'slaw: sin 0, v.l
: s,tl&: v2
where 0., is the critical angle for the lower horizon and 0, is lessthan the critical anglefor the upper horizon. The expressionfor the traveltimecurve SZis obtained as before:
'| lo'
t : :
OM' + R'P' M'M' + P'P" + - + vl v2
M'P' v3
2h, 2h, * Z, cos 0, Vrcos 0,, x - 2h. tan0. - 2h tan 0
V. x Vj
2h,
l.
+------...........---ll
Z, cos 0", \
-
ftri"e",)
2h, (t * rin e,) Z, cos0, \ ,4
: - ^+ A
M
P
'
y
z
P
P
"
Fig. 4.15 Relation between reflection and reliaction raypaths and traveltime curves.
L/
- - - - 2 c o s 0 . -+ 2h 2h + ,, + vl v2
cos0,:
+
t
(4.4r)
97
REFRACTION PATHS
curve to permit it to be analyzed correctly. We can find all of the velocities(hence,the angles0, also) by measuringthe slopes of the various sectionsof the time-distancecurve and then get the thicknessesof the layers from the intercepts
&.""
(4.43) '.: t-#,.. ('.- Z'^'';,'u')
:/depth,
' z
4.3.4 Effect of refractor dip
cr,-. St/car lce/depth)
0
l
3
5
V z /V t
Fig.4.16 Relation between critical distance x', crossoverdisrance x", and velocity contrast.
The simple situations on which eqs. (4.36) to (4.43) are basedare frequently not valid. One of the most serious defects is the neglect of dip because dip changesthe refraction time-distance curve drastically. The lower part of fig. 4. I 8 showsa vertical dip section through a refracting horizon. Let t be the traveltime for the refraction path OMPO'. Then, we have I
I I I I v,l o
I
o
OM + O'P MP T Vt V2 (ho+h,)tan9, _ hd+ h, *OQZ, cos 0. V2 : x c o s '(* u cho, s+0h. .. . (4.44)
_
V2
Vl
If we place the source at O and a detector &t O' , we are "shooting downdip." In this case,it is convenient to have I in terms of the distance from the source to the refractor ho; hence, we eliminate fr, using the relation h,:
h o* x s i n ( .
Writing t, for the downdip traveltime, we obtain to: (xlVr)cos( + (x/()cos 0. sin | + (2hulV,)cos0, : (xlV,)sin (e" + €) + (2holV,)cos0, :(xlV,)sin(0.+0+t,d,
(4.4s)
where tro: (2holVr)cos 0,. Fig. 4.17 Raypaths and traveltime curves for two horizontal refractors.
Thus, the time-distance curve for this refraction is also a straightline whoseslopeis the reciprocalof the velocity just below the refracting horizon and whose interceptis the sum of terms of the form 2h,cos 0rlV,, each layer above the refracting horizon contributing one term. We can generalizefor n layers:
,: ur,*z
where 0, : sin-'(V,lV^). This equation can be used to find the velocitiesand thicknessesof each of a series of horizontal refractinglayers,eachof constantvelocity higher than any of the layers above it, provided each layer contributes enough of the time-distance
)
The result for shooting in the updip direction is similarly obtained by eliminating ftr:
t,: (xlV,)sin(0. - {) + r,", where
t,,: (2hJV,j)cos 0".
) )
(4.461
)
Note that the downdip traveltime from O to O' is equal to the updip traveltime from O' to o,' this sourcepoint to sourcepoint traveltime is called the reciprocal time and is denoted by l" The concept that traveltimealong a path is the sameregardlessof the direction of travel is an example of theprinciple of reciprocity. Theseequations can be expressedin the sameform as eq. (4.37): to: (xlV) * t,o,
(4.47)
(xt\) + t,,,
(4.48)
t,:
GEOMETRY OF SEISMIC WAVES
98
Raypaths and traveltime curves for a dipping re-
Fig. 4.18 fiactor.
where V :
Vtlsin(0. + €),
(e. - 0. V,: V,lsin (4.49)
Voand V,are apparentvelocitiesand are given by the reciprocalsof the slopesof the time-distancecurves' For reversedprofiles,suchas shown in fig.4.18' eq. (4.49) canbe solvedfor the dip ( and the critical angle 0, (and hencefor the refractor velocity Z'): l sin r(VtlV,)1. o, : j [sin t(VtlV,l+ ] ,' o . r ' , -r( t(v € : I lsin l l v l ) s i n v t l v " ) 1 .) The distancesto the refractor, h, and h,,, can then be found from the interceptsusing eqs.$.a\ and (a.46). Equation (4.49) can be simplified where { is small enough that we can approximateby letting cos ( - I and sin € : €. With this simplificationeq. (4'49) becomes VJVr: sin (0. + t) = sin 0. + ( cos 0.' VlV,: sin (0. - O : sin 0. ( cos 0,; hence,
and assumingthat { is small enoughthat higher powers of ( are negligible: ' V , , : ( V , l s i no , X c o s{ + c o t 0 , s i n { ) : Vr(l - t cot 0,)' V , : V r ( l + t c o t0 , ) ; hence,
v,: :(v,t+ v,)
(4.s2)
4.3.5 Diving waves It is obviousthat raypathswill eventuallyreturn to the surface wheneverthe velocity increaseswith depth. The wavestraveling by such raypaths are called diving wayes.Symmetry shows that for horizontal velocity layering,the angleof emergenceis io(fig. 4.19a);at the : deepest point on the raypath (h-), i : 90" and p point on llV^, that is,p is the slownessat the deepest the iaypath for a diving ray. We can rewrite eqs.(4.29) and (4.30)for this situation as
,:2fr-
(4.53a)
s i n0 , : ( V t l v r \ : : V t I l l l v d l + 0 l V , l j , so that
u v,-;l (U V )+ (rl 4) 1.
( 4.s1)
An even simpler approximate formula for Vt (although slightly less accurate) can be obtained by applying the binomial theorem($15.1.4c)to eq. (4.49)
dz- .lo(4.53b) ', -' vrzllt 1pv(:)1't''2' )n the doubling factor of 2 arisingbecauseof the raypath from h^back to 0. If x, / measurementsare available for diving ways from a common source and if the velocity hai increasedwith depth monotonically,then
99
REFRACTION PATHS eqs.(4.53)can be solvednumericallyfor V(z). For a linear increaseof velocity,eqs.(4.53)become (seeproblem 4.20a) x : (2Vola)cotio : QVolal)sinh(atl2), (4.54a) (4'54b) t : (2la) ln [cot (iol2)]' and the maximum depth of penetrationis h^: (VJa)fcosh(atl2)- ll.
(4.55)
For the case of concentric spherical layering (fig' 4.19b),eqs.(4.53)become(seeproblem 4.20b)
o:'r",-##w,,*' (456a) ' : 2 1 " v t r l, R,_h^
dr
where A is the angle subtended at the center of the Earth by raypath SO and R" is the radius of the Earth' Richter (1958:app. VI) givesa numericalsolution for Z(r) in eqs.(4.56).Using LDEF in fig. 4.19b' we can write eq. (4.27)as
I I lh^ I I
: u'/uo?r'.rr., i)lVo: VndtJR"UO p' : R"(sin At the deepestPoint, P' : r^l\, p' : r^lV^:
w,.,
(4.s6b)
lp'V(r)lrl' ltt2'
so
(R1zr)sinlo : Et/bAor. (4.58)
If we plot a curve of traveltimeI versusangular distance A for an earthquakeevent at various stations, the slope, Ltl6L, givesr ^l V-. With diving waves,two velocity situationsrequire specialattention.A velocity gradientin a layer that is substantiallyhigher than the gradient abovethe bed, as in fig. 4.2ba,causesa very sharp increasein raypath curvature and a folding back of the time-distance curve. Such a triplication of branchesof the timedistancecurve (fig. 4.20c)is usuallydifficult to seebecausethe later branchesbecomelost in the later cycles of the earlier arrivals. Unless all branchesare correctly recognized,errors will be made in solving the time distance observationsfor Z(z)' The other situationleadingto errorsin determining Z(z) is that of a velocity inversion(fig' a'20b)' The inversionmay producea gap in the time-distancecurve' as in fig. i.iOc, anA this gap may not be recognized becausediffraction tends to fill it in' Although fig' 4.20 shows situations for planar layers,similar (but more complex) situations occur with concentric sphericallayersin earthquakestudies'
(b) (a) PlaFig. 4.19 Raypaths for increasein velocity with depth nar velocity layering; (b) concentric velocity layering'
|
-
I.sN
L I ' tNP
J' - ' 'PR
:2tr*+(x-2MI\\lV^' Noting that (sin i)lVo : (sin 0.)/ V, : llZ-, we find from eq. (4.32) I . /tan ]0.\
trr: i," \45/
:t"'"1(r^r-r,--rr,,)("-urn'')l
:j["",n-'(A *'n'(A], 4.3.6Linear increasein velocityabovea refractor The caseof a high-velocitylayer overlainby a layerin which the velocity increaseslinearly with depth (fig' 4.21) is of considerablepractical importance'The relation betweent and x for a horizontal refractor can be found as follows:
'x : where use has been made of the identity cosh get (4.31)' we l)'"]. From eq. ln[x + (x' MN : (l/pa)(cos io - cos 0.)
: (rlpa){lt- (VJV,,)'l'''- tt - (4lV-)'\'''}'
GEOMETRY OF SEISMIC WAVES
100
t i o n a t t o : 2 . 3 5 8 s , g i v e nt h a t t h e v e l o c i t yv : Z ' S O km/s. (b) Typical errors in t,V tomight be 0'6 m, 0'2 km/s, unOj -s. Calculate the corresponding errors in A't*ro approximately.What do you conclude about the accuracy of A/".o calculations? (c) Show itiat ttre more accurateNMO equation,eq' (4.8),can be written Lt|uro- L,trro(l - LtNMJ2t), in terms of the first-ordervalue of Lt NMogiven by eq' (4.7). Taking into account the errors in x, V /n,when is this equationuseful? 4.2 (a) Show that the quantity dtldx can be considered as a vector or component of a vector according as d/ correspondsto the total dip or component of dip. of fig' 1b; Using fig. 4.22, verify that the constructio-n (Hint: Ex(4'18)' eq' as results +.SUgiu.t th. tu-. pressf , m, and OC in terms of OA.) i.: Stto* that the equation for a dipping reflection, eq. (4.9),becomes (Vt)z : (2x cos $' + 4h7 determlne Fig. 4.20 Velocity situationsmaking it difficult to gradient' iiri"-Airtun"" curves (a) Region with large velocity (c) Time-distancecurvesfor inversion' velocity with n"gion ift (a) (solid linel and (b) (dashedline); diffractionswill ;ii;;; complicatethesecurves.
(Gardner, 1947),where ft is replacedby ft., the slant depth at the midpoint betweenthe sourceand receiver (seefig. 4.23).
V,=l'o+oh, 1J:^
in velocityin the with a linearincrease Fig.4.21 Refraction upperlayer.
Fig. 4.22 Combiningdip components'
Substituting in the first expressionfor t gives (4.59) t : (xth) + to, where /o : intercept time:
| (V^l%)- "olq_:V_ry!^Dl to= " -(2la){fcosh + ll - (V'lV^)')'''I'(4'60) (% l4)'l''' tl The slope of the head-wavetraveltime curve gives V-' A curve is plotted of to againsth,(or V) for given valuesof Zoa\d o, arrdh,and V,are read from this curve for particular measurementsof r0'
( I I I I I
s' Problems 4.1 6\ Calculate the normal moveout A/r.o for geophones 600 and 1200 m from the source for a reflec-
i,' A'
Fig. 4 23
Derivation
of X2-72
relation
for a dipping
bed'
PROBLEMS
l0l
+.4 (a) Using the dip-moveoutequation,eq. (4.11), and the resultsof problem 4.3, verify the following result (due to Favreaccordingto Dix, 1955): tan(:
t l t 2 A B -t i ) t t 2 '
where{ : dip, I : tru - tr", tu": traveltimebetween sourceA and receiverB, tn: traveltimeat sourceS tseefig. 4.23.y. (b) Using eq. (a.9), show that sin { :
- t2")l\h,r. Vr(t?rn
(c) Under what condition is the result in part (b) the sameas eq. (4.I l) and also consistentwith part (a)? 4.5 The expressionfor dip in terms of dip'moveout, eq. (4.l1), involves the approximation of dropping higher-orderterms in the quadraticexpansionusedto get eq. (4.10).What is the effecton eq. (4.11)if an additional term is carried in this expansion?What is the percentagechangein dip? 4.6 In fig. 10.5b,the reflectiontime at the top is 1.0s and the depth 1500m, the reflectiontime at the bottom is 1.4s, the interval velocitybetweeneventsI and 2 is 3300m/s,and the tracespacingis 100m. Calculate the depth and dip ofthe three reflectors. 4.7 A well encountersa horizon at a depth of 3 km with a dip of7". Sourcesare located200 m updip from the well with a geophoneat depthsof L0 to 2.6 km at intervals of 400 m. Plot the raypathsand traveltime curvesfor the primary reflectionfrom the 3-km horizon and its first multipleat the surface.AssumeZ: 3.0 km/s. (Hint: Seefig. 6.33.) 4.8 The numbered ticks at the top of fig. 8.5 are 1 km apart. (a) Select two fairly steeply dipping reflections,assume velocities(fairly high in this area), and determine the approximatedips. (b) Figure 8.5 is a migrated section; by what horizontal distancesare the reflecting points for these eventsdisplaced,that is, how far did they migrate? (Hint: See$8.8.3and fig. 8.30.) 4.9 @) SourcesB and C are respectively600 m north and 500 m east of sourcel. Traveltimesat A, B, and C for a certain reflectionare to: 1.750,1.825,and 1.796s. What are the dip and strike of the horizon, Z being 3.25 km/s? (b) What are the changesin dip and strike if line AC has the bearingN80'E? a.l0 (a) Two intersectingseismicspreadshave bearings N10'E and N140'E. If the first spreadshowsan event at to : 1.160s with dip moveout of 56 ms/km and the same event on the secondspread has a dip moveout of 32 ms/km, find the true dip, depth, and strike, assumingthat (i) both dips are down to the southand west,and (ii) dip on the first spreadis down to the south and the other is down to the southeast. The averagevelocity is 3 km/s. rb) Calculatethe position of the reflectingpoint (migratedposition) for each spreadin (i) as if the cross rnformationhad not beenavailableand eachhad been rssumedto indicatetotal moveoutl comDarewith the
resultsof part (a). Would the errors be more serious or less seriousif the calculationswere made for the usual situation where the velocity increaseswith depth? 4.11 Verify the derivation of the expressionfor k in $4.1.4and of eq. (4.21a). 4.12 Given the velocity-depthdata shownin fig. 5.19, what problems would you expect using simple functional-fit relationsin the different areas? 4.13 (a) CalculateV and V,^"down to each of the interfacesin table 4. l. Why do they differ (give a geometrical explanation)? (b) Pfot V and V,_.versusdepth and versustraveltime and determinethe best-fit straight lines for the four cases.What are the main problemsin approximating data with functional fits? Table 4.1 Layeredmodel Depth (km)
Velocity (knts)
0 1.00 1.00-2.50 2.50-2.80 2.80-4.80
2.00 3.00 6.00 4.00
4.14 (a) Assumingflat bedding,calculatedepthscorresponding to t0 : 1.0,2.0,2.1 , a n d 3 . 1 s u s i n gt h e velocity functions for V and Z.*. determinedin problems4. l3a and 4. | 3b.What errorsare introducedrelative to the depthsgiven in table 4. l? (b) Using the velocitydata in table4. l, tracea nonvertical ray through the various layersand find the arrival times and reflectingpoints offlat reflectorsat eachof the interfaces. 4.15 (a) Repeatthe calculationsof problem 4.14a assumingdip moveout of 104ms/km and find the dip in eachcase. (b) Tracerays assumingthe velocity is constantat the vafuesof V and V,^"calculatedin problem 4. 13. Find the arrival times and reflectingpoints of reflectorsat eachof the interfaces. 4.16 Figure 7.45showspart of a seismicrecordwhere the geophonegroup spacingis 50 m, the offsetto the near groups being 50 m and that of the far groups 600 m. (a) What is the velocity of the first-breaks? (b) Assumingthat the sourceis below the baseof the LVL and that the LVL velocity is 500 m/s, how thick is the LVL? (c) Arrival times at the sourcepoint for two reflections are given as 0.415 and 0.778 s; what are the average velocitiesto thesereflectors? (d) For these reflections, the arrival-time differences betweenthe far traces in opposite directions from the sourcepoint are given as +0.005 for both reflections. What are the dips of thesereflectors? (e) What is the dominant frequency of these reflections (approximately)?
GEOMETRY OF SEISMIC WAVES
102
t
frr =300m
,/r = 3 km/s
ft: =300m
/z = l'5 km/s
Y1 = 3 kmls
Iz. = 6 km/s
Vt = 6kmls (a)
(b)
Fig.4.24 Two different geologic sections that give the same refraction time distance curves.
4.17 (a) Giventhe velocityfunction V : |.60 + 0.60: km/s (z in km), find the depth, dip, and offset of the point of reflection when In : 4.420 s and AllAr : 0. 155 s/km. What interpretation would you give of the result? (b) If the ray continued without reflection,when and where would it emerge?What moveout would be observedat the recording spread?Calculate the maximum depth of penetration. 4.18 (a) Show that the two geologicalsectionsillustrated in flg. 4.24 produce the same time-distance curves. (b) What would be the apparent depth to the lower interfacesin figs. 4.24a and 4.24b if 4 : 3.15 km/s insteadof 6 km/s? 4.19 Figure 4.25 showsa refraction profile recorded as a ship firing an air gun moved away from a sonobuoy. Identify the direct wave through the water and disuseits traveltimesto give the source-to-sonobuoy tances(assume1.5km/s as the velocity in water). (a) Identify distinctivehead-wavearrivals,determine their velocities,intercept times,and depths of the refractors assumingflat bedding and no velocity inversions. (b) What is the water depth? Identify multiples and explain their probable travel paths. (The data in the upper right corner result from paging ($8.6.3)and actually belong below the bottom of the record.) a.20 (a) Verify eqs.(4.54) and (4.55).(Hint: Use eqs. ( 4 . 3 1 )t o ( 4 . 3 4 ) . ) (b) Deriveeqs.(4.56).(Hint: ln fig. 4.19b,M.BC gives (V 6t)' : (6r)' + (r EA)' ; using eq. (4.27), show that O' : Qllz1, (6A/6r);eliminating first 61, then 64, and integratinggiveseqs.(4.56a)and (4.56b). 4.21 If the velocity function in problem 4.17 applies above a horizontal refractor at a depth of 2.40 km, where the refractor velocity is 4.25 km/s, plot the traveltime-distance curve. 4.22 Given that situations (a) through (h) in fig. 4.26 involvethe sametwo rock types,draw the appropriate time distancecurves.Diagram (c) showstwo casesfor dip in oppositedirections.In figs.(i) and O, the velocity in the lower medium varies laterally accordingto the density of the shading. 4.23 Barton (1929) discussesshooting into a geo-
phone placed in a borehole(fi9. a.27) as a meansof determiningwhere the bottom of the borehole is located. (a) Given that A, B, D, and.E are equidistant from lA in the cardinal directions and assumingstraight-line travel paths at the velocity V and that the traveltimes from D and -E are equal, derive expressionsfor CC' and CW in fig. 4.27ain terms of the traveltimesfrom A and B, tA(.,ar'd tB(.,. (b) What are the valuesof tAC,and trr. for V : 2.500 kmls, AW : BW : CC' : 1000m, CW -- 200 m? (c) How sensitiveis the method, that is, rvhat are L,(CC')lL,tnr.,,and L(CW)IL/,..,?For the specificsituation in part (b), how much changeis there in WC and CC' per milliseconderror in /r.,? (d) Modify the assumptionsin part (b) by taking the velocity as 1.5 km/s for the first 500 m and 3.5 km/s for the lower 500 m. What are the actual traveltimes now and how would thesebe interpretedassumingthe straight-pathassumptionin part (a)? 4.24 SourcesA and B arelocatedat the endsof a225m spreadof l6 geophones.Using the data in table4.2, find the velocities,dip, and depth to the refractor.
Table 4.2 Refractionprofle r, (m)
/1 (ms)
/8 (ms)
rr (m)
0 l5 30 45 60 75 90 105 t20 r35 150 165 180 195 2t0 225
0 10 21 30 4l
98 92 87 8l
225 210 195 180 165 150 135 120 105 90 75 60
\tl
I I
59 65 70
65 60 52
t)
40
'78 81 85 89 94 98
43 )t
31 2l l0 0
A< JU
l5 0
F
Fig. 4.25 Sonobuoy refraction profile in Baffin Bay. Source was a 1000-in.rair gun. (Courtesy of Fairfield Industries.)
,F]
(e)
A
Fig.4.26 Time-distance curves for various twoJayer configuraions. This figure is adapted from Barton (1929) in the first publication in English on the seismic method The part above O of each diagram provides space for a curve of arrival time versus distance foi the model shown in cross-sectionbelow O' In each
te , ,
t t t
^-
- -- - - -, - ! ^
W
-2-----'
€t I
t I I
v (a)
c a w
\
lt l.'
(bl Fig. 4.27 Mapping a crooked borehole by measuring traveltlmes to a geophone at C' in the borehole (From Barton' 1929.) (a) Plan view; (b) vertical section AWB'
(t)
(/)
case,the velocity in the cross-hatchedportion is higher than that above. Part (a) has been completed to show what is expected. In (c), two alternatives are given so two sets of curves should be drawn. In (i) and (), refractor velocity varies horizontally and is proportional to the shading density.
REFERENCES References of veAgocs,W. B. 1950.Comparisonchartsfor linearincrease 15::22636. locity with depth.Geophysics, Barton,D. C. 1929.The seismicmethodof mappinggeologic pp. 572 624.New York: structure.In Geophysical Prospecting, AmericanInstituteof Mining and MetallurgicalEngineers. Brown, R. J. S. 1969.Normal-moveoutand velocityrelations for flat and dipping bedsand for long offsets.Geopftlsics, 34: 1 8 09 s . Daly,J. W 1948.An instrumentfor plotting reflectiondata on the assumptionofa linearincrease ofvelocity.Geophysics, 13: 153 t.
105 Dix. C. H. 1955.Seismicvelocitiesfrom surfacemeasurements. 68-86. Geophysics,20: Gardner.L.W. 1947.Verticalvelocitiesfrom reflectionshoot12: 221-8. ing. Geophysics, Levin,F. K. 1971.Apparentvelocityfrom dippinginterfacere36: 510-16. flections.Geophysics, Richter, C. F. 1958. ElementarySeismology.San Franctsco: W. H. Freeman. Shah,P.M., and F. K. Levin. 1973.Grosspropertiesof time 38:643 56. distancecvves. Geophysics,
t
Seismicvelocity
()verview Knowledgeof velocity valuesis essentialin determining the depth, dip, and horizontal location of reflectors and refractors, in determining whether certain things like head wavesand velocity distortionsoccur, and in ascertainingthe natureofrocks and their interstitial fluids from velocity measurements. We developa heuristic appreciationof the factors that affect seismicvelocity from a conceptualmodel of a sedimentary rock. F. Gassmann,M. A. Biot, and J. Geertsmadevelopeda model for a fluid-filled porous rock, and G. H. P. Gardner, L. W. Gardnet and A. R. Gregory hypothesizedthat microcracksin nonporous rocks lower velocity.Fracturing also generally lowersvelocity. Lithology is the most obvious factor we would expect to control velocity.However,velocity rangesare so broad and there is so much overlap that velocity alonedoesnot providea good basisfor distinguishing lithology.Sand velocities,for example,can be smaller or larger than shalevelocities,and the sameis true tbr densities; both velocityand densityplayimportant rrles in seismicreflectivity. Porosity appearsto be the most important single factor in determininga rock'svelocity,and the dependenceof porosityon depth of burial and pressurereli'tionships makes velocity sensitiveto these factors also.Velocity is generallyloweredwhen gas or oil replaceswater as the interstitial fluid, sometimesby so nruchthat amplitude anomaliesresult from hydrocarf,on accumulations. The near-surfacelayer of the earth usually differs markedlyfrom the remainderof the earth in velocity lnd some other properties. This makes the near\urtacelow-velocitylayer(LVL) especially important; !rur determinationsof depths,attitudes,and continuLn of deeper eventsare affectedas reflectionspass through this layer.In arctic areas,a zone of permanentlyfrozenearth,permafrost,distortsdeeperevents lecauseof an exceptionallyhigh velocity.Fluid pres.ure that exceedsthat of a column of fluid extending :!r the surface("normal" pressure)lowersseismicve;.rci1yt11ti.is usedto predict abnormal pressures.Gas just belowthe sea rrdratesthat form in the sediments ir-rorin deepwater also producevelocity changes. Velocity terminology is often misusedand causes rruch confusion.Section5.4.1 attemptsto clarify the rrecisemeaningof average,root-mean-square, stack-
107
ing, interval, Dix, phase,group, apparent,and other velocity terms. Seismicvelocity is measuredin boreholesby sonic logs ($5.4.3)(and by vertical seismic profiling discussedin $13.4).Velocityis also measuredby surface seismicdata becauseof the dependenceof normal moveout on velocity.The reflection-coemcient equation can be usedto obtain velocity information from amplitudes.a form of inversion.
5.1 Model of a sedimentary rock 5.1.I A pack oJ uniformspheres Seismicvelocityas givenby eqs.(2.58)and (2.59)relates to a homogeneousmedium, but sedimentary rocksare far from homogeneous. Theseequationscan be written, for solid media, cr2: (tr + 2p")lp,
B' : t-rlp,
and for fluid media, c t ,: \ / p ,
g.:0;
hence,in general,
y : lKto),,2,
(5.1)
where K is the effectiveelastic parameter.Thus, the dependence of Z upon the elasticconstantsand density appearsto be straightforward.In fact, the situation is much more complicatedbecauseK and p are interrelated,both dependingto a greateror lesserdegree upon the material and structureof the rock, the lithology, porosity,interstitial fluids, pressure,depth, cementation,degreeof compaction,and so on. The most notable inhomogeneityof sedimentaryrocks is that they are porous, containing fluid-fllled spaces within them. Porosity is simply the pore volume per unit volume.Wang and Nur (1992b)discusstheorres relatingseismicvelocity to the compositionof rocks, The simplest rock model consists of identical spheresarrangedin a cubicpattern(fig.5.la) with the matrix subjectedto a compressivepressureL If the radius of the spheresis R, the force ,F pressingtwo adjacentspherestogetheris the total force acting on a layer of n X n spheres(that is, (2Rn)' 2|)divided by the number of spheres(!t'), or F : 4R29. This force causesa point ofcontactto becomea circleofcontact
SEISMICVELOCITY
108 of radius r and the centersto move closertogethera distances (seefigs. 5.lb and 5.1c),r and s being related to R, I and the elastic constants4 o of the spheresby Hertz' equations (see Timoshenko and Goodier. 1951:3'72-7): r : [3(l - o2)RFl4E|t3, (5.2) t s : [9(l - o')'F'l2RE']n. I When a P-wavepasses,I changesby A9, resulting i n c h a n g e sL F : 4 R ' L 9 a n d A s : - 2 R e , w h e r e e t s the strain in the direction of F (seefig. 5.ld). Thus, the effectiveelasticmodulus K is given by Ag : 1. .(: - '
I2R -s --l
L
!g:
AJ
r AF : | 3E'9 1'''
2Rl,
Lgtl-o')'l
on differentiatingeq. (5.2).The averagedensity is the weight of a spheredivided by the volume of the circumscribedcube,that is, p :71ttO3p)/(2R)3 : t/orP, p being the density of the material of the spheres. Thus, we get for the P-wavevelocity, ("n,.,
Fig. 5.1 Effects ofcompression on a cubic packing ofspheres. (After White, 1965.)(a) Cubic packing; (b) force causescenters to move closer together; (c) force causes point contact to become circular area of contact; (d) effect of change in force.
V."r,.: (Kl-p)tt': I81E2gl(l - o2)2?rrpslr/6. (5 . 3 ) Gassmann(195l) calculatedthe velocityfor a hexagonal packing of identical spheres(fig. 5.2) under a pressureproduced by the weight of a thickness: of overlyingspheres;he obtained for a vertical ray Vn,-: fl28E' gzl(l - o2)2rr2p)fi/o, (5.4) where g is the accelerationof gravity. BecauseI is nearlyproportionalto:, eqs.(5.3)and (5.4)give the samevariation of velocitywith depth. Faust (1953) found an empirical formula for velocity in terms of depth of burial z and formation resistivityR', that is consistentwith eqs.(5.3)and (5.4): 4:
900(zR')"o,
/5 5\
Vrbeing in m/.1,: in m, and R' in ().m. However,the deviations of individual measurementswere very large, indicating the presenceof other factors that havenot beentaken into account. Random packsof well-sortedparticleshaveporosities in the range of 45 50Vo,but under pressure,the particles deform at the contacts,and as a result the density increasesand the porosity decreases(Sheriff, 1911;theelasticconstantsalsochange see$5.2.5). on the model 5.1.2 Expectationsba,ged What velocity relationshipsmight we expectbasedon the foregoingmodel of a rock? Clearly,porosity will be an important factor in velocity becauseit should alTectboth the effectiveelasticityand the density,and indeed it is often said that porosity is the most important factor in determiningthe velocity of a sedimentary rock. The contactareabetweenspheresis not proportional to the pressureforcing them together,so we may expectthat the pressuredependenceofvelocity will not be linear but will diminish with increasing
pressure(or with depthof burial).Fluid filling the intersticesin a rock may be expectedto resistthe effects of the overburden,that is, the overburdenweight tendsto squeeze out the porositywhereasthe interstitial fluid tends to preservethe porosity. Thus, the effectivepressureon a rock will be the differencebetweenthe overburdenpressureand the fluid pressure, the di/firential pressure.If the pore spaceis connected to the surface,the fluid pressureshould be that of a column of porefluid extendingto the surfacewhereas the overburdenpressureis the weight of the overlying rocks. Where this is true, the pressureis said to be normal. However,if the pore fluid cannot escapeto allow the grain-to-graincontactsto adjustto normal pressure,then some of the overburdenweight will be supportedby the interstitial fluid and we will havean overpressured situation. An overpressuredrock will "feel" the same differential pressureas it would at some shallowerdepth, where it would have a lower velocity, and, hence, we expect overpressuringto lower the velocity. We would not expectthe deformationof a rock under high pressuresto be elastic.Hence,if a rock from which the porosity has beensqueezedout by depth of burial should be uplifted, we would not expectporosity to return, except for a small amount becauseof some remaining elasticity. The porosity of a rock might be expectedto dependon the maximum stresses it has endured since formation, that is, porosity may dependon the maximum depth of burial rather than on the presentdepth. Gas as a formation fluid is much more compressible than a liquid and hencegas in the pore spaceshould lower the velocity much more than oil or water. In fact, gas is so compressiblethat the presenceof just a
MODEL OF A SEDIMENTARY ROCK
109
t r )
W ! z
.V
\
l
7
\
.
(c)
\
@)
Fig. 5.2 Close packing of uniform spheres.(a) Cubic packing (as in fig. 5. la), an arrangement that is not gravitationally stable. (b) Hexagonal packing, gravitationally stable and the densest packing possible. (c) First layer of a hexagonal stack, showrng two classesof sites (.4 and B), adjacent sites of which cannot both be occupied at the same time (for example, the two dashed
locations). (d) Second layer of spheresshowing how occupyrng some I and some B sites leavesextra spacein between.(e) Hexagonal stack with left side occupying I sites and right portion B sites; the consequence is increased porosity. The random choice of,4 and B sites leads to a completely random pack after a few layers.
small amount of gasshould lower the effectiveelasticity nearly as much as a large amount, and hencewe expectthe effectof gas on velocity to be very nonlinear.Gas in the pore spacewould affectdensityas well as effectiveelasticity; if we gradually introduce gas into the pore space,the first small amount of gas should have a large effect on the numerator of eq. (5.1), but additional gas will have much less effect, whereasthe effecton the density term in the denominator will be linear with the amount of gas.Thus, as the amount of gasis graduallyincreased,we expectat first a sharpdecreasein velocityand thereaftera gradual steady increase in velocity. The near-surface weatheringlayerbeinggenerallyabovethe water table, we expect it to have exceptionallylow velocity. BecauseS-wavesdo not travel through fluids,the nature of the pore fluid should have little effect on S-waves
compared to that on P-waves;however,it will still havea minor influencebecauseof its effecton the density. By changingP-wavevelocity much more than Swave velocity, the presenceof gas will change the effectivevalue of Poisson'sratio and hence change amplitude-versus-offset relationships. Cementationand pressure-induced recrystalization would be expectedto decreaseporosity. Very few of the things that might happento rocks increaseporosity (seefig. 5.3a).Hence,generally,we may expectporosity to decrease(and velocity to increase)with increasein depth of burial (fig. 5.3b),cementation,age, as sorting becomespooret and so on. The major failure in expectationsis that an increase in densityusuallydoesnot lower velocity,as might be expectedfrom eq. (5.1). Phenomonathat changethe densityusuallychangethe effectiveelasticitymore, so
SEISMIC VELOCITY
ll0
0.0s
suming that relative motion between the fluid and rock is negligible.We shall follow the account given by White (1983:57-63). The rock is assumedto be a porous skeleton or framework with the pore fluid moving in unison with the rock so that there are no viscousenergylosses.To distinguishvarious componentsof the system,we use the following notation for the bulk moduli: kt.,k., k*, and k refer respectivelyto the fluid filling the pore space,the material comprising the skeleton,average values for the skeleton plus empty spaces,and the fluid-filled skeleton.We use $ for the porosity and C: llk for the incompressibility.We assumethat the saturatedrock is isotropic and that the fluid has no effecton the shearmodulus, so p : p*. The average density is simply the volume-weightedaverage:
Averageporosity,P 0 . 2 0 0 . 3 00 . 4 0 0.10
0
) ^ lz
x o
l0
/ 3 '9/
J
st
P:0P/+ (1 0)P,.
We considera cube of the saturatedrock and apply an incremental pressure A0. We assume that the pores are interconnectedso that the fluid pressureis that applied to the pore openingson the cube faces (however,no fluid enters or leavesthe cube because there is no fluid motion relativeto the rock). We write for the total pressure
l5
-. (a)PorGity (%) ? p 3
(5.6)
0
A0 : A9* + Lgt.
r08'
(5.7)
From the definition of dilatation, we can write eq' (2.18)in the form -LY|V : C 49.
6
; d
o o
Thus, the pressureA9r changesthe fluid volume by - LlrtlY : the ma6C, tW,. But A0, also compresses terial of the skeleton,so -A{,/Y : (l - d)C" AE. Finally, A9* compresses the skeleton so that -AT./1/ : C, A0*. Adding these three effects,we find for the total volume change
( - L Y | V ) : [ 6 C , +( 1 - 6 ) C "A )E + c. ag*.
Fig. 5.3 Factors affecting porosity. (a) Porosity in a clastic rock decreaseswith depth of burial (compaction), cementation, and "limpoorer sorting, but is essentiallyunchanged by uplift. The it-of-porosity" line refers to normally pressured situations and ignores possible secondary porosity. (After Zieglar and Spotts. 1978.) (b) Porosity depth curves. (From Atkins and McBride, 1992; reprinted with permission.)
rltoaa SAtrlt lllrllxc raal (tlw tlctoclactll
o
E
!o that the explicit densityterm in the denominatorgives the wrong implication. Biot, Geertsmaequations 5.1.3 Gassmann, To obtain a useful formula for the velocity of a fluidfilled porous rock, the effectsofporosity and the pore fluid must be taken into account. Gassmann(1951) derivedexpressionsfor the effectivebulk modulus as-
(5.8)
oattto
.ttot
lllrll
rclotllY
l.ta
oaitlll
l.l
(tturr
DrY tlrtrt lr tlrlttio ilcrclrcllxo
lttlr lt ttc'c rilllrlD)
r o o ' m s a m c n f r
Pr$sure(P.s.i.) Fig. 5.4 Effect of microcracks on velocity of gabbro. (From Gardner, Gardner, and Gregory, 1974.)
I
Velocitg(km/s) 2 3 4
I
I
Alfuvium, * Drg sand, Veaihering
c-r H-?
l-2H l-
7r
t,5-t I
F-4-.|
4 Hud
F3a
Glacial
-21
Shale
Smd, Sandstone
Lirnestone
Dolomile
Arrhgdrile,
r Ggpsum A Selt
6rrnite
l-1 FS
4-l
l-5 + Fig. 5.5 P-wave velocities lor various lithologies. Data from ( l ) G r a n t a n d W e s t ( 1 9 6 5 ) ;( 2 ) Kearey and Brooks ( 1 9 8 a()3 ;)
Lindseth (1979);(4) Mares ( 1984);(5) Sharma ( 1976);(6) Sheriff a n d G e l d a r t ( 1 9 8 3 ) ;a n d ( 7 ) W a t e r s( 1 9 8 7 ) .
SEISMIC VELOCITY
tt2
- l) in the nuAdding and subtracting (k*lk,)(k*lk" merator, we get
k:k*+
Fig. 5.6 Histogram ofvelocity values tabulated in Birch (1942) for different lithologies. (From Grant and West, 1965.)
3 . 3t rt
x
Best-fit lines Sands
tr 3.lH
Shales
2.9LL Oc
r E N
d
-
-SUd_ltne
V)
Fig. 5.7 Portion of SP- and velocity logs for a well in the U.S. Gulf Coast. The SP-values distinguish sands from shales. (After Sheriff. 1978.)
(t-k*lk,)2
60lkf - vk") + (l/k,xl k*lk") ( 5I. 1 )
Thus, k equals k* for the skeletonplus a term that dependsin part upon the fluid filling the pores. BeM : k + 4p"13(seeeq. (2.58)and table2.2),we ca:erse can add 4p,13to both sidesand get (t - k*lk")2 M:M** -
+(ykf uk")+ (uk")(r u.,o(1,4
Becausea2 : Mlp, the P-wavevelocity dependsupon the fluid bulk modulus and the porosity as well as the rock properties.On the other hand, the fluid influencesP only through the density (seeeq. (5'6)). One might expect the coupling betweenthe rock skeletonand the fluid to be greaterat low frequencies; Gassman's equation is therefore called the lowfrequencysolution. Biot (1956)assumedthat the fluid "highcould flow through the pore spacesto give a frequency solution"; this introduced the additional factorsof fluid viscosityand matrix permeability.Biot alsodefinedthe low-frequencyrangeof the applicability of the Gassmannequationas v < 0.1(e$l2rrrP,),
(5.13)
wheree is fluid viscosity,and r is matrix permeability. Geertsmaand Smit (1961) derived an equation We obtain another equation for - LYIY'by considering that A9* producesa relativevolume changein the skeletonplus pores equal to C* A9* and A0, results in a relative change in the skeleton material C" Ag, (the volume changeof the fluid is taken care of in the'term C* A9*). Adding, we find that
( - L 1 fl 1 f ) : C , A E + C * A g *
VEI-oclTY (lus)
(5.9)
Equations(5.8) and (5.9) are now solvedfor A0, and A0* with the result
- C) Lgr: e^1'r'1r)G"- C*)/[oC*(C" +c, (c, - c*)1, Ag*: (-A1//D0(C"- C)tl+C*(c,- c/) + c.(c, - c*)1. Adding and using eq. (5.7),we havefor the effective bulk modulus
As
t(c,-_91(E lr : "k,__r_ c -Lyfv oc*(c, - C,)+ c"(c,- c*)' o(r/k"- !tk) + (rtk"-rtk*) _ d ( l / k * )l (t k , - l t k , l + ( l l k , x l l k , - l l k * l '
14000 fr ONE WELL
97 WELLS
(a)
(bl
(s.l0)
Multiplying numeratorand denominatorby k* gives
- uk) + (k*lk"- l)l/to(l/fr"- rlkf) k : tk*601k" + (l/k,xk*/k,- l)1.
Fig. 5.8 Shale velocities in the Ship Shoal region, ofshore Louisiana. (From Hilterman, 1990.) (a) A velocity analysis in one well; (b) histograms showing velocities in 97 wells throughout the area.
EXPERIMENTAL DATA ON VELOCITY from the Biot equationswhere wavelengthis greater than pore size: u -
{[(:. ?)+
il-c,/c),
IiJ," (l -0-C./C)C.+6gJpJ (5.l4)
This equationgivesvaluessimilar to eq. (5.12).These equationsfit experimentaldata reasonablywell considering how many variablesare usually not known precisely.
5.1.4 Model of a nonporousrock The foregoingsectionsbasicallyexplain observedvelocity variationsas attributablemainly to changesin the porosityand the fluid filling the porosity.However, nonporousrocks also show variation of velocity with pressureand other parameters. Gardner, Gardner, and Gregory (1974) hypothesized that nonporous rocks have minute voids (,.microcracks")that result in loweringthe velocity.Generally, rocks are composedof many minerals that have different temperature coefficientsof expansion, so that a temperaturechange will create stressesand open up microcracks.To testtheir hypothesis,they determined the velocity-pressureresponsefor a gabbro with only 1.77oporosity and then heatedthe gabbro to 750'C and cooled it, after which they repeatedthe velocity-pressuremeasurement(fig. 5.4). The loweringof the velocity pressure curveis presumedto be due to the creation of new microcracks.After being subjectedto pressure,the samplereturnedto a higher velocity when the pressurewas lowered;presumablv. the pressurehealedsome of the microcracks.probably,repetition of the pressurecyclewould heal more mrcrocracksand elevatethe velocity-pressurecurve still more, approachingmore closely the preheating curve. One might also expect the heat-treatmentinduced stressesto gradually dissipatewith time so that the curve would climb gradually. The inclusion of fluid in microcracks greatly increasesthe P-wavevelocity,but leavesthe S-wavevelocity nearlyunchanged(Nur and Simmons,1969).
5.2 Experimental data on velocity 5.2.1 General Velocity can be determinedfrom measurements (a) in situ (see95.4)or (b) on samplesin a laboratory.press (1966)listsmeasurements of both types.Care has to be taken that measurementson samplesare not distorted by changesin the sample conditions; many early measurementsgave misleadingvalues because they were made on desiccatedor otherwise altered samples.Gregory (1977) discusseslaboratory measurementsand givesa number of referencesfrom outsidethe usualgeophysicalliterature.Reportsofvelocrty measurementsin the literatureare numerous,and
ll3 in the following sections,we cite only those believed to be representativeand that give insight into the interrelationshipof factors. The usual way to determinethe effectsof various factors is to observewhat happenswhen we let them vary one at a time; we then assumethat when more than one factor changes,the effectwill be the sameas if the effects changed sequentially.However, the factors are not independent;thus, for example,changes in external(overburden)pressure(or depth of burial) are apt to changethe interstitial-fluidpressure,the porosity, and the density.Also ordinary descriptionsof rocks often ignore the facts that they have various structures and are heterogeneousin composition. Thus, interpretation of experimentaldata regarding the parameters governing rock velocity becomes difficult and the data in the literatureinvolveappreclable scatter. Despitethe central role that velocity plays in interpretation and the fact that it is often the principal source of uncertainty,much of the literature (Press, 1966;Robieet al., 1966;Christensen,1989;Nur and Wang, 1989)ignoresthe factorsaffectingvelocity,and others give such broad rangesthat the data are not very useful.
5.2.2 Efect of lithology Lithology is probably the most obvious factor affecting velocity and some of the data from the literature are summarizedin fig. 5.5. The most impressiveaspectsof this figure are the rangesof values(somemeasurementsextend beyond the rangesshown) and the tremendousoverlapof the valuesfiordiffering lithologies.Thesesuggestthat velocityis not a good criterion for determining lithology except in a general sense. High velocity for sedimentaryrocks generally indicates carbonatesand low-velocity sands or shales, whereasintermediatevelocitycan indicateeither.The broad rangesfor each ofthe lithologiesillustratethat many other variablesare involved,especiallyporosity and age.The Grant and West (1965)histograms(fig. 5.6) of the data from Birch (1942) also show broad rangesand overlap,as do the data tabulatedby press (1966)and Christensen (1989). Velocity measurementsare sometimesused to discriminate between sandstoneand shale in areas of clastic deposition.Sandsand shalesin boreholesare usuallyidentifiedon the basisof self-potential(SP)or gamma-raylogs; fig. 5.7 showspart of SP and sonic logs in a well that was part of a large study involving many wells in the U.S. Gulf Coast region. Regression analysisfound a differencebetweenthe best-fitvelocity lines for the sand data and the shaledata. but the scatterofindividual valuesexceedsthe differencesbetweenthe best-fitlines.Statisticalpredictions,such as of the overallsand/shaleratio. sometimesare satisfactory when based on reasonably good local data,
6000 El roooorrooo I S eooo-zooo li3llttooo'lzooo Q rcn -aw Z.l'tzow'ttooo - tlooo @ aooo-eooo f| raooo
-rooootrt.* $l sooo
sandand shalevelocitiesand denstFig. 5.9 Maps of average for offshoreLoutii.! i.t,ft. depthintervaifrom7000to 8000ft mapsand the ,iunu. fn. coastlineshowsnear the top of these
leasesystems' block markingsshow the Louisianaoflshore Corp ) (a) SandveDevelopment Geophysical tie of ii"*,.rv (d) shaledenstty' iocitvl (bi shalevelocityl(c) sanddensity;
I Density1gm/cci -1e6 ffi), zzc-zc. I $ ree-zor Q zt -zze Qtzoz -zto Zl zsg-zqs @t zro -zt, D zls -zsz $f ztz -zzl J zsz*
SEISMIC VELOCITY
116 whereaspredictionsfor specificsamplesare little better than guesses. Hilterman (1990) found much variation in shale properties,presumablybecauseof variationsin grain sizeand cementation.The velocitiesof shalesseenin one well (fig. 5.8a)almost trackedhistogramsof average shalevelocitiesfrom 97 wells within the area (fig. 5.8b), both showing fairly broad ranges of values. Shalemembersare more continuousthan sandsand the strongestand most continuousreflectorsare often caused by shale-shalerather than shale-sandcontrasts. In studies of U.S. Gulf Coast wells, Hilterman found that curves of velocitiesand densitiesagainst depth for sandsversusshalesvary considerablyfrom area to area; this variability is illustratedin the maps of fig. 5.9. Becauseof the variability, Hilterman prefers to base synthetic seismogramstudies on edited data from nearby wells rather than to usegeneralized values. Figure 5.10 showsthe dependenceof reflectioncoefficientson the density and velocity differencesbetween sandsand shalesaccording to his stu{ies. In very young sediments,sand-shaleacousticimpedance contrastsare causedmainly by density,rather than velocity, differences,but in older and more deeplyburied sediments,velocity differencesdominate.In the PlioPleistocene, a shale-to-sand reflectionis generallynegative,but for the Lower Miocene,it becomespositive at greaterdepths.Where the densityand velocitycontributions have opposite polarity and roughly equal magnitude,reflectionsare very weak (as in overpressuredUpper Miocenesection,fig. 5.10b). Hilterman also found (fig. 5.1I ) that Poisson'sratio o decreaseswith increaseof velocity for both sands and shales,clean sandshaving appreciablysmallero valuesthan shales.This impliesthat water-filledsands may show an increasein amplitudewith offset.The o contrastbetweensandsand shalesbecomessmalleras the clay content of sandsincreases. Sonic logs ($5.4.3)and density logs (Telford, Geldart, and Sheriff,1990:$l1.7.2 and I1.8.3)often result in poor synthetic seismogrammatches to observed data in the Gulf Coast area. Hilterman believesthat sonic logs indicate sand velocitiesthat are too high becausethey measurean invaded-zonevelocity that exceedsthe velocity of uninvadedsand.The editing of sonic-logdata for syntheticseismogrammanufacture ($6.2.l) attempts to correct for this. The use of deep induction logs (which depend on porosity, like the soniclog; seeTelford et al., loc. cit:652-4) to give the acousticimpedancefor syntheticseismogrammanufacture often resultsin better matchesto actual seismic records. Sandstonesoften contain appreciableclay filling the pore spaces,and clay content is the next most important factor (after porosity) in determiningvelocities.Han, Nut and Morgan (1986)saythat the reduction of P-wavevelocity when pores are clay-filledis about 30Voof that when fluid-filled,and the factor for
S-wavevelocity is about 40Vo. A graph of S-wavevelocity for different lithologies showsspreadscomparableto those for P-wavesexcept that the data are much sparser.By cross-plottingPwaveslownessagainstS-waveslowness,Pickett(1963) found that the domains of different lithologies separated (fig. 5.12a)but some authors quote valueswell outside the indicated ranges (Hamilton, l97l). The ratio of P- to S-wavevelocities(B/c) is thus to some extent indicativeof lithology,as illustratedalso in fig. 5.12b,and S-wavesurveyinghasbeenemployedto determine lithology.Hamilton summarizesthis usageof B/ctdata; he notesthat there is generalagreementthat B/c < 0.5 for unconsolidatedsands,but he notes that consolidatedrocks do not alwayshaveB/o > 0.5. The data for shalesare still very sparse;Hamilton (loc. cit.) quotesvaluesrangingfrom 0.08to 0.36,but some authorsbelievethat the rangefor shalesoverlapsthose of other lithologies to such an extent that lithology identification by B/a measurementis no longer as promisingas once thought. The P- to S-wavevelocity as both porosratio in sandstonesgenerallydecreases ity and clay content increase(Han et al., 1986).
5.2.3EffectoJ density The densityof a rock is simply a volume-weightedaverage of the densitiesof the rock constituents.The densities of the mineralsthat constitutemostsedimentary rocks (table 5.1) encompassa relativelynarrow rangeof abour +7Vo(halite excepted).The major reason why rocks vary in density p is becausethey vary in porosity (seeeq. (5.6)).Histogramsof density (fig. 5.13)resemblethoseof seismicvelocity(fig. 5.6).The densitiesof igneousand metamorphicrocks are generally higher than thoseof sedimentaryrocks because they havelow porosity. Seismic velocity appears to be proportional to mean atomicweight(Birch, l96l), determinedby dividing the molecularweight by the number of atoms. This is shownin fig. 5.14.Most of the relativelyabundant minerals have mean atomic weights around 20 (table 5.1). Metallic ores generallyhave higher mean atomic weights,for example,30.4for ilmenite,31.9for hematite,and 33.1for magnetite. Gardner et al. (1974)graphedvelocity againstdensity (fig. 5.15) and found that the major sedimentary lithologiesdefineda relativelynarrow swathacrossthe graph. The principal exceptionsare the evaporites (anhydrite, gypsum, salt) and carbonaceousrocks (coal, peat, lignite). They determined an empirical equation relating velocity and density, often called Gardner'srule: P
:
avtt4,
( 5 .l 5 )
wheredensity p is in g/cm3,a : 0.31 when velocity I/ is in m/s anda:0.23 when Zis in ftls.This equation is often used to obtain density values in synthetic seismosram constructionor in inversion.
EXPERIMENTAL DATA ON VELOCITY
-0.02
whereAt is the specifictransit time (slowness),Alrand Al- the specifictransit times of the pore fluid and rock matrix, respectively. In terms of velocity I{ this equation is
Relloclion Coollicl.nl
00
0.02
tt7
0.04
I
- d ) = o, l v ' r y+ ( l .
o ( o -
to
(a) n0ll0cllon Coorlicionl
- 0 02
0.0
0.02
004
o o O r
o o
SVelocily
(b) F l c l l o c l i o nC o o l l i c i o n l
-o.o2 -o.04 o -l-_ _ _ t _ _ _ _ _ l
o O c o s
(s.l 6b)
Equations(5.16),the time-average equations,were developedby Wyllie, Gregory,and Gardner (1958)(see fig. 5.16).Howevequnlike eq. (5.6),which is rigorous, eqs.(5.16)are statisticaland empirical.They make no allowancefor the structureof a rock matrix, the connectivity of pore spaces,cementation,or past history, all of which might be expected to affect velocity. Equations(5.16)are usedextensivelyin well-loginterpretation,often with values(table 5.2) for L,t, and Lt,, (or ( and V^) that are empirically determined to give the bestfit over a rangeof interestrather than the actual slowness(or velocity) values,and the fit may be poor outside the intended range, for example, for poorly consolidatedhigh-porositysediments. It should be noted that the interstitial water in shalesis mostly bound water rather than free water in pore spaces;nevertheless, the volume fraction occupied by this water is usually treatedas porosity. Equations(5.| 6) are sometimesgeneralizedby adding terms for the volume fractions occupiedby other constituents.For example,Han et al. (1986) found that adding terms for clay content reducedthe scatter from 6.6 to 2.8Vofor P-wavevelocityand from 10.3to 5.lVo for S-wavevelocity. However,they also found that they could fit velocity measurementsbetter than thoseof slowness;their equationsare
o 0
-o.o4
I
V
0.o
o : 5.59- 6.930* 2.18C1-t2.l%o)kmls ,, ',", : 1 8 . 3- 2 . 2 1 6- ' 7 . 2 C k f t l s , ] B : 3.52 4.910 1.89(-r4.3vo\kmls ,, ,,0, : f 1 . 5- l 6 . l d - 6 . 2 C k f t l s , ]
Oensilya
0
lo
Table 5.1 Density of representativesedimentaryrock minerals(after Robieet al., 1966)
(cl Fig. 5.10 Sand-shale reflection coefficients at normal incidence attributed to differencesin density and velocity values of sand and shale, Gulf of Mexico Tertiary. The solid curves are for normal pressures and the dashed ones for overpressured conditions. (Courtesy of the Geophysical Development Corp.) (a) Pliocene and Pleistocene;(b) Upper Miocene; (c) Lower Miocene.
5.2.4Efect of porosity As previously stated,porosity is often the most important factor in determining a rock's velocity. An equationanalogousto eq. (5.6)is often used:
Ar = d Ar,* (t - d) Ar,,,
( 5 .l 6 a )
Mineral
Formula
Calcite Dolomite Anhydrite Flalite Quartz (ct) Albite Orthoclase Kaolinite Muscovite
CaC0. CaMg(CO.), CaSO. NaCl
Density (g/cmt)
2.71 2.8'7 2.96 2.16 2.68 sior 2.62 NaAlSi.O, 2.55 KAlSi3Os 2.60 Al,si,os(oH)o KAlr(AlSi.O,uXOH), 2 . 8 3
Mean atomic weight
20.0 18.4 22.'7 29.2 20.0 20.2 21,4 15.2 19.0
Many natural minerals vary in composition and hence tn density.Kaolinite and muscoviteare includedas representative of clay minerals.
SEISMICVELOCITY
118
V E L O C I T Y( f t / s )
V E L O C I T Y( f t / s l
(b)
(a) Coast Fig. 5. I I P-wave velocity versusPoisson'sratio for Gulf shale ,uid, und shales.Triangles indicate sand values, circles
Corp ) (a) values. (Courtesy of the Geophysical Development (shaly) sands' Shalesand clean sands; (b) shalesand dirty
Table 5.2 Maftix velocities commonly used in sonic-log interpretatbn V,,,
Unconsolidated sand Sandstone Shale Limestone Dolomite Anhydrite Salt Gypsum Granite Casing
km/s
kft/s
ps/m
ps/ft
193 1 8 2o r 1 6 7 20s 550 l 56-143 139 164 2\8,220 182 164 187
>58.8 )).) or) l.u 62.5 t6'7 47.6 43.5 43.5 50.0 66.76T.0 55.6 50.0 57.0
4.O
5.5 6.1 57.4
whereporosity $ and clay content C are volume fractlons. 5.2.5 ElJbctsof depth of buriul and pressure with increasingdepth of Porosity generallydecreases and hencevelocity inpressure) (oioverburden burial creaseswith depth. The elasticconstantsalso depend on the pressurebecauseof the structure of sedimentary roiks, which are not homogeneousas elasticity theory assumes. The rocks of the LouisianaGulf Coastare generally relativelyundisturbedclastic rocks whose conditions are similar to the rock model describedin $5'l'l' Gregory (1977) gives velocity versusdepth data for Gulf Coast sandsand shalesunder normal pressure
conditions(fig. 5.17).The useof a ll4 exponenlglves a betterfit than the l/6 exponentof eq' (5'5)' The pore spacesin rocksare filled with a fluid under u p..r.ur., which is usually different.from that resuiting from the weight of the overlying rocks; the effecti'e pressureon the granular matrix is the difference between the overburden and fluid pressures' Normal fluid pressureis that of a column of fluid extending to the surface.Where formation fluids are overorissured,the differentialpressurebecomesthat appiopriate to a shallower depth and the velocity t.nOs to be that of the shallowerdepth ($5'3'4)'Laboratory measurements(fig. 5.18) show that velocity is .rr.niiully constant when the overburdenand fluid p..rr,r... u.. changed,provided the differentialpresiure remainsconstant.Abnormal fluid pressurecon-
119
EXPERIMENTAL DATA ON VELOCITY
'
400
'/ ./
./ ^
6
N --
-Y
€
3 250
\
/
E .r'
o
,'
,,',
r, .r'^^^r(rr. .-to"'rt'
,l
,'
,''
1&
,,
,''
/
-j,, , '.r,
,'
.r{1t r}}'l,r(t
t', l t
.t'
{;,
7t' ,,' .r'
i
,'
, l ' - ,t .r-'-
,,(Fri',:p"'," ,'/n)"
,'
. ,?: .n(
/
t .h9o'
P'wavc v.loci(y, d(kft/3) t4 18 t6
/
,1'ot ,'
A'Lt't2'
t2
,/
,' ," l;**,t'',,",r'(':." .-
J
ut
7-
,{' d"'7',' y'''' y''/ ;i'y'' /
,"' .""'1","",'("',"t'
-,t
>
F O
I2a+.
20
066
F i g . 5 . 1 4 V e l o c i t ya t l0 kilobars versusdensity for silicatesand oxides. The numbers refer to mean atomic weishts. (From B i r c h .1 9 6 1 . )
3 060
i rr" I
s ?
@ 050
8 50
40
Velocity (kft/s) 12 15
60
P.wrv€ vclocily. a(km/s)
(b)
2.8
Fig. 5.12 Relation between S- and P-wave velocities (/, and (,) for various lithologies. (a) Cross-plot of laboratory measurements (after Pickett, 1963). (b) Use of S- and P-wave velocity r a t i o ( p / c r )a s a n i n d i c a t o r o f l i t h o l o g y ( f r o m S h e r i f f ,1 9 8 9 13 8 8 ) .
l
t
t
t
1 ^
d
2.O
t
Sdl ond olluvio
3.0 4.0 5 Velocity(km/s)
Sondstonas Shola5
Fig. 5. I 5 P-wave velocity density relationship lor different lit h o l o g i e s( t h e s c a l ei s l o g , l o g ) .T h e d o t t e d l i n e s h o w se q . ( 5 . 1 5 ) and the dashed lines show constant acoustic impedance ( k g / s . m r x 1 0 6 ) .A f t e r G a r d n e r e t a l . 1 9 7 4 : a n d M e c k e l a n d Nath. 1977.)
Limasiona
l
l
l
r
\l
a
tE
!
\
I
t
I
I
o
s5
I I
I I
\
z
I I
r.4
1.6
'.8
2.O
2.2
2.4
2.6
2.a
3.0
Densig (g/cc) Fig. 5.13 Histogram of density values tabulated in Birch (1942) for different lithologies. (From Grant and West, 1965.)
stitutesa severehazard in drilling wells and one use is in predictingsuch of seismicvelocitymeasurements z o n e s( s e e$ 5 . 3 . 4 ) . The variation of velocity with depth, often referred to as the velocity function (54.2.4),is frequentlya reasonablysystematicincreaseas we go to greaterdepths. Velocity versusdepth relationshipsfor severalareas are shownin fig. 5.19. Gardner et al. ( l9l 4: 175 -6) state:"With increasing depth the velocity increasespartly becausethe pressure increasesand partly becausecementationoccurs at the grain-to-grain contacts. Cementation is the more important factor." Their graph for sands is
SEISMICVELOCITY
120
\
\
x \
20
r 1
,
\i" o '
t:
\^" e' o ,\^-p:' -^ o\6 p ^' d":o \ \ \r., o o
o o, l0
o,
^
'
o Sandstone . Limestone
^
r!.
"\:
^
"\f
, \';:' {q.,:.,
Velocity(kft/s) I2 I0
14
4.O 4.5
3.5
o
' '16'
,' :'(rl
5.0
V e l o c i t y( k m / s )
Fig. 5.16 Velocity-porosity relationship. The horizontal scale is linear in transit time (l/l'). The dashed line is the time-average e q . ( 5 . 1 6 b )f o r V - : 5 . 9 4 k m / s ( 1 9 . 5k f t / s ) a n d V , : 1 . 6 2 k m / s (5.32 kft/s). (After Wyllie et al., 1958.) Velocity (km/s) t.0
4.5
l0
l2
14
Velocity(kft/s)
l0
with depth for in-situ sedimentsis more rapid until they becomeconsolidated;below about 6000 ft they roughly follow the time-averageequation. Some authors interpret data as showing a simpler curve (e.g., Faust, l95l), that is, they regard consolidationas a more continuousprocess. An exampleof the variation with depth of ct, B, and p/o in a predominantly sand-shalesection is shown in fig. 5.2L Gardner and Harris (I968) considervalues of p/a < 0.5 as indicating water-saturatedunconsolidated sand. 5.2.6 Effectsofage, frequency,and temperature An early form (Faust,l95l) of eq. (5'5) includedthe ageof the rock as a factor in determiningvelocity'In fig. 5.22,each data point is the averageof many values.Older rocks generallyhavehigher velocitiesthan younger rocks, but most geophysicistsagreethat age is merelya measureof the net effectof many geologic processes, that is, olcierrocks havehad longer time to and so be subjectedto cementation,tectonicstresses, on, which decreaseporosity.The history ofrocks varies so much in time and spacethat the time factor must be only approximate. Time-dependentstrain may play some part, but how large a part is not known. Experimentaldata generallysupportthe conclusion that dispersion(variation of velocity with frequency) is small over the range from hertz to megahertz.We expect velocity to changewith frequencybecauseof absorption(52.7.2),the manner of changedepending on the absorptionmechanism.Nur and Wang (1989:
t2
PRESSURE(MPa) r4 .:
; lo 6
lq
".."{--=:--Etffi lL1999o
t;
l8
'/ 20
,r' ^ -d-- o------o--
'.9 2X 24
':ry-o
/--o--o------o--
i A
o
e : iE
o--
'o'-
{E
F C)
ul
Fig. 5.17 Velocity depth relationship for Gulf Coast sands and shales. Best-fit quadratic curves are also shown. The step graph shows data ior offshore Venezuela.where conditions are similar. The dotted curve shows averagevelocity versus depth for the Venezuelandata. (Data from Gregory, 1977.)
shown in fig. 5.20; the curves for Ottawa sand and glassbeadssubjectedto pressureindicate what they believewould happen if sands were buried without consolidationor cementation.The increasein velocity
aP'rno^ a
o J
28
-o--
--o---o -o---o---o-
1*
6 o J
u.l
-O---O---O--O---O aP.am O > t
rr D))rrrrrrfm) _ll_Jf. i.i" ,:"Dr'!.>D)r!.t.t }},lt b)ilrrDr D)Df rr., ) r , , .,., I I i1 --llJ,:?ffD)'t"li.)rt.)tr-r,r'.rx'ri>)' r',r,.r..rrDiil..l j jrr")';1 ..,,i.r.r>;,p-, r i Ip I I ;,r ; I I I I r"r,r^".---l;,f
2 0-lqi It nn,'.n^.r.. r t J-;i-:i*l*
a.:i:r;r'::':1::i'-i
rjr; lxii;::j--+ ; fi l?lli,*Hry rrrr
>,,.,.!i.ili;l:;;:llli: _Ji.l'_i"l-'-l_:mr --;;.'ri':;)r{..} 6i j,iir j ir i,r *Dr I >rt 6'-t}A -
\.,
{
}t!;,8.}tt
).t
( I }, r, f ,rrt
"
7.,,,.'
,1ii; irr' r r'*r or*rr; ipir .+ii ;,3::l:ffit;
+i::ififiHr f*:: :*llil:sr ' jill,iii*l: **ifr n:riii ;:l :;; 1 1:L :l :::,,i i;l;';;.H;l'ffi ::Ii:1' ::X:l 1,,,':::ll' i-l'ilr:;1.:
li{f il'+1+r-';7;r;i#r.5;n-iiiffi ; 5*;lr i',,_: -br:l ':: ') r'i"lijJJ;;, 'fllt iii
jii::
?.,J::::,F;:: I::lt iliH;j:
ii.i:i;ill[. ill:l:i:j :.j ri::::ll:i,'^l::
-;q!,rr)..sr.;:.{1.,
,o-ii':;l :::fi-i ..;::i:-:::l l:i:i:: l::,:.-'*e.-b"E'd
\a)
Fig.6.32 Seismic recordshowing (Courtesy singing. of HaliburtonGeophysical (a)Fieldrecord. Services.) and(b)thesame the sameas for the first multiple at offset2r (fig. t5.35) and for the next multiple at offset 3x, and so on, so that the primary on one trace sometimescan be used to predict and compensatefor the multiple seenon anothertraceat anotheroffset.This providesthe basis for radial multiplesuppression (99.5.13). 6.3.3Refractions The onsetof headwavesis often followedby a number of parallel alignments,that is, they seemto involve a
after singing has been removed by deconvolution processing
($e.2.4).
long wavetrain consisting of severalcycles.As the offset distance increases,the number of cycles increasesand the peak energy shifts to later in the wavetrain, an effect called shingling (fig. 6.36a). The amount of shinglingis greaterwhen the refractor is of limited thickness.Becauseof this shift of energy,it is often impossibleto pick the onset time required for applicationofhead-waveequationssuchas eqs.(4.36) to (4.48).Most timing of head wavesis done on later peaksand troughs,and a correction is applied to obtain the onset time. This processoften givessatisfac-
l.
,i
,li\
/ t'l \
r ,
1 ' /
/
\ t t
Offsct (ftl
v h Fig. 6.33 Constructing raypath ol a multiple from a dipping bedwherevelocity is constant. -7
i
J Ji-t {
F -
( '
+
o o
E F
I
i
+
ilt
t t
il
t- t t
I
ill
Fig. 6.34 Change of amplitude with offset for sea-floor multi: olJs. offshore easiern Canada. Trace spacing 100 m and offset of first trace : 425 m. The amplitude buildup occurs near the critical angle (seeproblem 6.13). (Courtesy of Chevron')
EVENTSOTHER THAN PRIMARY REFLECTIONS
t7l
I
I
I I
Fig. 6.35 Relation between offset and angle of reflection for pnmary and multiple reflections from a flat reflector.
tory resultseventhough absorptionand other mecha_ nisms shift the frequency spectrum lower with increasingdistanceso that latercyclesdo not perfectly parallelthe waveonset. Several mechanismscontribute to the shingling effect(figs.6.36bto 6.36d).Someof the enersvthat peelsoff the refractorcan be reflectedat bedsparallel to the refractor and returned to the refractor at the criticafangle(suchas M andM, infig.6.36b)to form delayedhead waves.Multiple reflectionsof this type can peal off the refractor continuouslv.and for anv parallelreflectorthat is significantin ireating multiples,they tend to add in phase(the head waveconsequent to a reflectionat M havingthe samedistanceto travef as one reflectingat M,). The result is to steal energyfrom the front ofthe headwaveand add cvcles at thetailend. Wavesthat bounce repeatedly(fig. 6.36c)in layers within the refractoralso add tail to the refractionwavetrains.Diving wavesresultingfrom a velocitygradient in the high-velocityrefractor (fig. 6.36d)havethe similar effectof adding tails. A velocitygradientin the refractorconsiderablystrengthensa headwave,as shownin fig. 6.37. As the refractor becomesthinner,destructiveinterferencebetweenthe headwaveand the reflectionfrom the baseof the refractor also weakensthe head wave, as shown in fig. 6.38.Poisson'sratio also has an effect on head-waveamplitude. Note that the head wave sometimes is phase-shifted, as in fig. 6.38. Refractions(headwaves)are not usuallya problem on reflection records.They are generallyof low frequency, have straight alignments (prior to normal_ moveout correction),and are attenuatedby stacking. Head wavesare only observedwhere the offset eiceedsthe critical distanceand, as shown in fig. 4.16 and by eq. (4.39),the criticaldistanceis lessthan the refractor depth only for V,IV, > 2.24. Velocity contrasts of this magnitude are possiblebelow the base of the weathering,for example,where carbonatesor evaporitesare overlain by sandsand shales,but usually head wavesfrom deeperrefractorsdo not appear on enough traces to make their moveout useful in identifyingthem, and they often disappearin the muting of the first-breakregion (the upper-right triangular regionof fig. 6.3).
(b)
fTt-_l
t
\ (d)
Fig. 6.36 Mechanisms that lengthen the refraction waverrain. (a) Section showing head-wave shingling. (Courtesy of Geophysical Development Co.) (b) Reflections of head waves from parallel reflectors above the refractor. (c) Repeated reflections within the refractor. (d) Velocity gradient in the refractor.
6.3.4 ReflectedreJract ions Wherea refractoris terminated,suchas shownin figs. 6.39a and 6.39b,the head wavewill be reflectedbackward. It may appear on the later portion of a reflectron record some distance from the actual refractor termination.When the refractor termination is nearly perpendicularto the seismicline, the reflectedhead wavewill havea nearly straightalignmentwith an apparent velocity approximatelythe negativeof the refractor velocity.The head wavewill be reflectedeven though the law of reflectionis not satisfiedat the refractor termination.The refractor terminationmay be either againstlower- or higher-impedance material so that the reflectedhead wavemay havepolarity either oppositeto or the sameas the head wave.Where the refractoris massive,reflectionsas in fig. 6.39cmay appear much like the reflectedheadwave(figs.6.39aand 6.39b). Where the refractor termination is off to the side of the line (fig. 6.39d),the event may have some curvature(pseudo-normalmoveout)acrossthe record ( s e ep r o b l e m6 . 1 5 ) .
I I
CHARACTERISTICS OF SEISMIC EVENTS
172
OFFSET
6
o'. ui
=
5
l !
,
, , r , r
, l , r , r r r l t r r r l
(a) OFFSET
G 0.4 IrJ
= F
Fig. 6.37 Strengthening ofa head wave by a velocity gradient' Reflection normal moveout has been removed so that head waves curve upwards. (Courtesy of Geophysical Development Co.) (a) Velocity step from 2000 to 4000 m/s (b) Velocity step
6.3.5 Surfac'ewaves Surface waves(ground roll) are usually present on reflection records.For the most part, theseare Rayleigh waveswith velocitiesranging from 100 to 1000m/s or so. Ground-roll frequenciesare usually lower than thoseof reflectionsand refractions,often with the energy concentratedbelow l0 Hz. Ground-roll alignments are straight,just as in the caseof refractions, but they havemuch lower apparentvelocities.The envelopeof ground roll builds up and decaysslowly and often ground roll includesmany cycles.Surface-wave energygenerallyis high enoughevenin the reflection band to overrideall but the strongestreflections;however,becauseof the low velocity,different geophone groups are affected at different times so that only a few groups are affected at any one time. Sometimes there is more than one ground-roll wavetrain,each with a different velocity.Occasionally,where surface wavesare exceptionallystrong,in-line offsetsare used to permit recordingdesiredreflectionsbeforethe surface wavesreach the spread.
irom 2000 to 3000 m/s, and then gradient increasingthe velocity to 4000 m/s. (The lower event from 0.65 to 0.74 s is a converted wave. Note also a phase shift of the wide-angle reflection from that near normal incidence.)
effectscan be attenuatedby the useof Surface-wave arrays($8.3.5to 8.3.9and problem8.6)'by frequency filtering (ground roll can be seenon the 0-6-Hz and slightly on the 6-12-Hz panels of f,g. 9.20)' and by apparent-velocityfiltering (seefig. 9.38)' 6.4 Resolution 6.4.1General Resolutionrefersto the minimum separationbetween two featuressuch that we can tell that there are two featuresrather than only one' With respectto seismic waves,we may think of (a) how far apart (in space or time) two interfacesmust be to show as separate reflectors(verticalresolution)or (b) how far apart two featuresinvolvinga singleinterfacemust be separated to show as separatefeatures(horizontalresolution)' (The word "resolution" is often usedlooselyto denote the ability to tell that a featureis present.) Clearly, the ability to see and distinguishfeatures dependson the signalinoiseratio and the knowledge
RESOLUTION
T I J
jlllil llf|ll
OA
G ul
= F
o.6
ffifffll OFFSET
'r!' j
o.4 3 ul F
Fig. 6.38 Effect of refractor thickness on head wave. Head wave loses amplitude because of destructive interference with reflection from baseof refractor when the refractor is thin. Normal moveout for reflection at top ofrefractor has been removed
so that the head wave and the reflection from the bottom of the refractor curve upwards. (Courtesy of Geophysical Development Co.) (a) Refractor 1.5 wavelengthsthick, and (b) refractor 3/4 wavelength thick.
and experienceof the interpreter. Where a correct model is used for interpretation,it is possibleto exceedconventionalresolutionlimits,that is,if we know a priori exactlywhat we are looking for in very good data, then subtledifferencescan be usedto locateand identifyit. If seismicwaveletswereextremelysharp,resolution would not be a problem. Howeveqreal seismicwavelets involve a limited range of frequenciesand hence haveappreciablebreadth (see96.6.t ).
are two waveswhen the arrival of the seconqwave causesa perceptiblechangein the appearancecf the first wave. Rayleigh(Jenkinsand White, t957:300)delinedthe resolvable(separable)limit as being when the two events are separatedby a half-cycle so interference effectsare minimized. Ricker (1953b) and Widess (1973) used slightly different criteria, which resulted in slightlysmallerresolvablelimits. Kalweit and Wood ( 1 9 8 2 d) i s c u s rse s o l u t i o n criteria. For a boxcarfrequencyspectrum(seeeq. (15.123)), the waveletshapeis that of a sinc function. The Rayleigh criterion is equivalent to a width of approximately 213u,,, whereu, is the upper frequencylimit of the boxcar (seeproblem 6.l8). Thus, we must record higher frequenciesif we are to achievehigher resolution (Sheriff.1977).
6.4.2 Verticalresolution Let us first consider resolution in the vertical direction. For two horizontal reflectorsa distanceL,z apart, the deeperreflectionlags behind the shallowerby the fraction 2 A:/1,of a wavelength.We can tell that there
C H A R A C T E R I S T I C SO F S E I S M I C E V E N T S
t74
as the signal/noiselevel and the experienceof the interpreterin similar studies.Thesethree examplessuggestthat the Rayleighdefinition of resolvablelimit is reasonable. 6.4.3 Tuningand thin-bedeffects
(b)
(c)
Fig. 6.39 Reflected refraotions. (a c) Refractions reflected fiom f aults or salt domes. (d) Isometric drawing of refractions reflectedfrom the termination of the reliactor to the side of thc sprcad; paths are shown from source Sto geophonesG, and G'; dashed lines indicate head-wavetravcl in thc refractor'
As an illustrationof verticalresolution,fig' 6.40b showsthe effectof a wedgewhosevelocity is intermediate betweenthat aboveand below it. The waveshape clearly indicatesmore than one reflectorwhen the wedge thicknessexceedsl\14 (12 ms). Figure 6.40c showsa wedgewith a velocity different from that of the surrounding material. The waveshapeis nearly constantbelow a thicknessof \/4, wherethe amplitude is at a maximum becauseof constructiveinterference(tuning;see$6.4.3).Note that the wedgestill produces a significant reflection when it is appreciably thinner than the resolvablelimit, and a bed only tr/20 to \/30 in thicknessmay be detectablealthough its thicknesscannot be determined from the waveshape.For wedge thicknessless than tr'/4,the waveshape is the derivativeof that for a single interface ( s e e$ 1 5 . 1 . 7 ) . Similar resolution considerationsapply to structural features.Figure 6.41showsa seriesof faults with varying amounts of throw, the fault being quite evident when the throw is \/4 or larger. Obviously,the ability to resolvedependson other factors also, such
When a bed embeddedin a medium of differentproperties is 1/4 wavelength(\/4) in thickness,the reflections from the top and baseof the bed interfereconstructively (as in fig. 6.40c) and the amplitude increases,an effect calledtuning.Tuning is important in the analysisof hydrocarbon reservoirsand other thin-bed interpretation situations.A thin bed is defined as a situation where the aggregatethicknessof is lessthan \/4' bedsunderconsideration Figure6.42 showstiming and amplitudemeasurementsfor the thining-wedgesituationsshown in fig. 6.40.Where V.) V.> /,, as infig.6.42a,the destructive interferenceat tr/4 producesan amplitude minithe amplitudegivesapmum. For largerthicknesses, proximately the correct reflectivity of the interfaces of the sidelobes with successive althoughinterference time Peak-to-peak oscillation. some causes wavelet greaterthan \/4 give for thicknesses measurements although the approximatelythe correct thicknesses produceminor errors. sidelobes successive The more common situationencounteredin reser($14.4)is shown in fig. 6.42b,where voir geophysics at l/4 V.: V, * V..Then constructiveinterf-erence maxlmum. amplitude produces tuning a wavelength Trough-to-peaktime measuremelltsgive approxifor thicknesses mately the correct grossthicknesses sidelobes greaterthan \/4 (although the successive produceminor errors)but no informationfor thicknesseslessthan \/4. Thin-bedthicknessinformation below can be obtainedfrom amplitudemeasurements 3\/16 thickness.The amplitude thicknessgraph is nearlylinearbelowabout\/8, but the amplitudeis relto thicknessin the tuning vicinity. ativelyinsensitive waveletsand mapsthe peak If one useszero-phase and troughthat indicatethe top and baseofthe wedge in fig. 6.42b,the arrival times give correctvaluesin the thick-bedsituationbut not in the thin-bedregion. The observedpeak and troughcan comeno closertogetherthan \/4, so that for a thin bed, they effectively push each other apart, giving arrival times that are too early fbr the top and too late fbr the bottom of t h e b e d . T h i s o b s e r v a t i o ni s i m p o r t a n ti n r e s e r v o i r studies. geophysics Meckeland Nath (1977)calculatedthat, for sands embeddedin shale,the amplitudewould dependon the net sandpresentprovidedthat the thicknessofthe is lessthan \/4. Mahradi (1983)verientiresequence fied this using physicalmodels(fig. 6.a3).For gross thicknessesless than tr/4, waveshapesare the same and amplitudes(fig. 6.43f)lie on the samecurveas in fig. 6.42b,whereasfor grossthicknessesgreaterthan changeand amplitudesno longer lie tr./4,waveshapes for fig' 6'43f (Note: The measurements on this curve.
INFLECTIOT\I POINTS 2ro
RESOLVED
RAYLEIGH'S CRITERIOf\I
UNRE9LVED
+ DECREASIIJG IMACESEPARATIO\I (a) TWO -
26
24
22
W A Y L A Y E B T H I C K N E S S( M I L L I S E C O N D S ) 20
18
16
14
1t
1n
Q
c
A
1
A
.n
E UJ
=
100
a--
TWO - W A V L A Y E R T H I C K N E S S( M I L L T S E C O N O S )
26 24 22 2 0 1 8 1 6 1 L ' t 2
ln
a
A
a
s uJ 1On F-
(c) Fig. 6.40 Rcflectionsillustrating vcrtical resolution. Zero_ phasc sinc wavelets; thickness of tr/4 corresponds to 12 ms. ( A f t e r K a l w e i t a n d W o o d , l 9 8 l : 1 0 . 1 89 . ; 1 a yl i l u s t r i . r t i n rse s o l u t i o n , ( b ) r e f l e c t i o n sl i o m s i n g l ei n r e r l l c e t U p p e r r e t l e c t i o n ya n d
w e d g e o fi n t e r m e d i a t e v e l o c i t y ( V , >V . > V , o r V , < V . < V , ) , and (c) the same as part (b) except the wedge is en-rbeddedin a medium of different velocity (V, - V, * V.l.
+r
rll
I
E
E
a
F
)l
+r
+r
I
I
I
I
'({
'{
I
( I
|l
I
F-is.6.41
Reflection from a faulted reflector, with the fault throw indicated as fractions of the dominant wavelength.
@ 6
U z
z
Y
F 6 F O 2 z
o E 3
' oF
c o
SU ti
=
;
] o ' F
TWO - TVAV TRUC TXICKN€SS lxtLltsEcoa{osl
(a) Fig. 6.42 Amplitude and timing measurements for wedges shown in Iig. 6.40. The interferencemechanism is shown above the diagrams. Zero-phase sinc wavelets; the horizontal dashed (dotted) lines indicate the amplitude and traveltime as if inter-
TVO-WAY TRUE THICXNESS
(rrLLrsEcoiosl
(b) lerence is not involved. (After Kalweit and Wood, 1982: 1043.) (a) Case where Z, > V, ) V, and (b) where V.: V, * V..
a
ATTENUATION weremade at the center of eachportion in figs. 6.43a to 6.43e to avoid distortions becauseof diffractions from the discontinuities.) 6.4.4 H orizontalresolution The Fresnelzone (96.2.3)is often taken as limiting horizontal resolution on unmigratedseismicdata although other factors such as signal/noiseratio, trace spacing(sampling),three-dimensionaleffects,and so on, also affect how far apart featureshave to be to be distinguishedas separatefeatures.Note in fig. 6.15 that there is little evidenceof reflector shape(that is, that the reflectorsare flat) when they are lessthan one Fresnelzone wide. Resolutionon migratedsectionsis difficult to quantify becauseit dependson many factors,especiallythe presence of noise.Migration(S9.13) can be thoughtof ascollapsingthe Fresnelzones,and hencethe Fresnelzone sizecannot be usedas a criterion for horizontal resolution on migrated sections.Ordinary migration collapsesthe Fresnelzone only in the direction of the migration so that (unlessthree-dimensional migration is performedon 3-D data) correction is not made for contributions perpendicularto the line. One of the most important factors is the quality of the unmrgratedsection;migration rearrangesthe noise as well as reflections,creating what is sometimescalled migrationnoise. Actual migration is performed on sampled data (sampledspatially,that is, at discretegeophonelocations, as well as at discretetime intervals).Spatial (99.1.2b; aliasingconsiderations seealsofig. 6.2)limit the angle of approach, which in turn limits the amount of dip that can be migrated. The sampling theorem dictates that at least two samplesper apparentwavelengthmust be obtainedin order to recognizefeatures,even with perfect data. Thus, for example,to recognizea stream channelon a horizonslice(fig. 12.16)generallyrequiresbin srzes no largerthan 1/3or l/4 the channelwidth. Horizontal uncertaintyalwaysexceedsvertical uncertainty, often by a factor of at least 2. Schneider (1978)gives an exampleshowing that 5Vovelocity error smearsthe position of a discontinuityover a horizontal distanceequal to 5Voof the depth; local velocitiesare usuallynot known betterthan this. 6.5 Attenuation 6.5.I Atrenuutiunme(huni.w.t The amplitudesof eventson a seismicrecord depend upon a multitude of factors (fig. 6.aq. Someof these factors(for example,recording/processing) are within our control. The effectsof otherscan be estimatedand then compensatedfor. Still other factors affect data with about the sametraveltimesin about the sameway and thus do not introduce significant trace-to-trace differences,the main factor on which interpretational decisionsare based.
t77 Divergenceis usuallythe major factor causingtimedependentamplitudechanges(see$2.7.3).The energy spreadsout so that the wavedecreases in strengthbut the total energyin the wavefielddoes not change.If the medium were homogeneous,the amplitude weakening would be inverselyproportional to distance,or Zt,' however,becausevelocity generallyincreaseswith depth, raypath curvaturemakes the wave spread out more and thus makesthe decreasein amplitudelarger. Newman (1973) showed that, for parallel layering, the amplitude decreasedepends approximately on llV?^,t, and Hardage(1985)showedthat this facror is appropriatefor observeddata (fig. 6.45). Absorption (52.7.2)causei wave energyto disappear by converting it to heat. However,like dispersion, most of the factors affecting the amplitude of wavesas they travel through the earth (partitioning at interfaces[chap.3], interferencewith other wavessuch as peg-legmultiples [96.3.2b],and diffraction or scattering) redistributethe waveenergyrather than cause it to disappear.Sometimescompensationfor these various factors is approximatedby multiplying by an empirical exponentialfactor. In general,seismicamplitude decreasesexponentially with time,as shownin fig.2.25.Higherfrequencies are attenuatedmore than lower frequenciesso that the spectrum of a seismicwaveletchangeswith time (fig. 6.46).Hauge (1981)studiedcumulativeattenuationin a largelyclasticsection(fig. 6.47)for VSP data.Spencer(1985)concludesthat attenuationmeasurements are not promisingas a diagnosticof lithology becauseof the intrinsic scatterproducedby pegleg multiple interference. Unlike most of the effectsin flg. 6.44, which are generallyunderstood,the basicmechanismsby which elastic-waveenergy is transformedinto heat are not clearlyunderstood.Toksozand Johnston( I 98I ) summarizedthe stateof our knowledgeabout attenuation and absorption.Variousabsorptionmechanisms have beenproposed(White, 1965,1966)but none appears adequate.Internal friction in the form of sliding friction (or stickingand sliding)and viscouslossesin the interstitial fluids are probably the most important mechanisms, the latterbeingmore importantin highpermeability rocks. Other effects,probably of minor significancein general,are the loss when part of the heat generatedduring the compressivepart of the waveis conductedaway,piezoelectricand thermoelectric effects,and the energyusedto createnew surfaces (of importance only near the source). Many of the postulated mechanisms predict that, in solids, p should depend upon frequency;howeveq Q appears to be independentof frequency(that is, 11is directly proportionalto frequency;seeeq. (2.1l7)). In liquids, Q is inverselyproportional to frequency.The loss mechanismin rocks must be regardedas an unsolved problem (Aki and Richards,1980:156-7, 169-70). Often, no distinction is made between "attenuation" and "absorption."Becauseof difficultiesin measuringabsorptionand also becausethe quantity of in-
(a)
Net
0.0r4
lh€knessl Totalthickness:
0.02s
0.v2
0.056
0.070
0.052
0.093
0.r32
0.172
wavdengfih
1.0
-
Not thrckness: Totalthicknessl
0.043
0.086
0.129
0.172
0.166
0.289
0.412
0.215 0,535
wavdenglh
(e) Fig. 6.43 Reflections from interbedded lithologies Net and grossthicknessesare given in terms of the dominant wavelength' iFrom Sheriff, 1985, after Mahradi. 1983.) (a) Reflections from plates of varying thicknessesmeasuredas fractions of the domtnant wavelength. (b and c) Reflections where lithologies alter-
nate. (d and e) Reflections from beds of different thicknesses' (f) Graph of amplitudes versus net thicknesses,with asterisks indicating points for which gross thicknessesare greater than r/4; A, daia from part (a); O (b)r r (c); X (d); V (e); O, A' f' * from other models.
Nct
thicknoss:
0.157
Totelthickness:
0.2
0.3
(d) Net thicknessl
Totalthicknoss:
0.8
0.9
uJ
Q.;
F@ = o-
0.08
0.16
0.24
N E T T H I c K N E S (SX ) (D
C H A R A C T E R I S T I C SO F S E I S M I C E V E N T S
180 Geophone Superimposed notse
snsitivity
Instrument balance
Table 6.1 Absorptionconstants for rocks
L f Peg-leg multiples
from thin reflectors
ariation of reflection angle
D(dB): rr
a
and coupling
20-200 70-130 20-'10 50-200 135 190 5-50 200-400 75 300
Sedimentary rocks Sandstone Shale Limestone Chalk Dolomite Rocks with gas in Pore sPace Metamorphic rocks Igneousrocks
0 . 1 60 . 0 2 0.04 0.02 0.16,0.05 0.06-0.02 0.02 0.02 0.630.06 0.02-0.01 0 . 0 40 . 0 1
(FromSheriff'1975) amplitude' affecting Fig.6.44 Factors terest is usually the net decreasein wave amplitude, measurementsare often made of total attenuation without regardto its causeand the resultsusedto determinea valueof 1 in e9.Q.ll0) (seefig' 2'25)' Although this may be a usefulmethod of treatingattenuation, it has no proper mathematicalbasisbecausethe attenuationdue to partitioning, peg-legmultiples,and so on is not a continuousfunction of distance,as requiredby eq. (2.1l0). s 6.5.2 Absorp t ion measurement Attenuation is due to both absorptionand a number of more or less predictablefactors as describedin Q6.5.1.In the laboratory, measurementsare usually made of absorptionbecausethe other factors can be calculated(at least approximately);however,laboratory measurementsare invariably made at high frethe quencies (becauseof scaling requirem^ents ^for 384) 1990: Sheriff, and Geldart, Telford, model; see and so have doubtful significanceunder actual field conditions (becauseabsorption 11increaseslinearly with frequency;seewhat follows)' In field measurementsof absorption,the effectsof partitioning and other significantfactors must be aliowed for to obtain meaningful absorption values' Difficulties in achievingthis have resultedin wide divergencein absorptionmeasurements'Measurements of ibsorption havebeensummarizedby Attewell and namana (t966), Bradleyand Fort (1966),and Toksoz a n d J o h n s t o n( 1 9 8 1 ) . : Attewell and Ramanafound a best-fitvalue of 1 authors, 26 from values of average the 0.2 dB/km for and Waters(1987:33) givesa fairly extensivetable of tn Q values.The ranges of values are summarized one-half to be appear 6Ut. O.t. Q valuesfor S-waves to one-thirdthosefor P-waves.Tullos and Reid ( 1969) report measurementsin the first 3 m of Gulf Coast : 0'24) but seiiments of n : 13 dB/wavelength(Q m (Q : 300 next 0.15 to 0.36 dB/wavelengthfor the Pierre in the measurements 20 to 9). Often-quoted = 0'39 dB/km (1958) were al. et McDonal T by shale : 3'3dB/km f o r P - w a v e (sQ : 3 5 , E : 0 ' 9 ) a n d 1 formation in massive for S-waves;the Pierreshaleis a velocity P-wave a with m thick 1200 Colorado about
50 UJ
o z
UJ I E UJ
620 -) I OE lrl
ro E o t!
o o r 6 U
o o F
o
UJ u a UJ
z =
l
o.I
t
j
o.2 0.3
o N E - W A YT I M E( S ) Fig. 6.45 Gain needed to overcome spherical divergence for VSP data. The slope of the line on the log log plot is nearly { i . 1 n r o m H a r d a g e , 1 9 8 5 :1 7 3 . )
of 2330 m|s. Q is generallyindependentof amplitude for strains less than l0 a, which coversvirtually all situations. seismic-wave Experimentalevidencesuggeststhat the absorption coemcient 1 is approximately proportional to frequency,that is, r1tris roughly constantfor a particular rock. Such an increaseof absorptionwith frequency ($6.5.1)providesone mechanismfor the observedloss of high frequenciesand the changeofwaveshapewith distance. Peg-leg multiples ($6.3.2b) and possibly changes.In other phenomenaalsoproducewaveshape interbeddedsections,the loss in amplitudebecauseof peg-legmultiple effects(fig. 6.30d)appearsto be comDarableto that due to absorption.
SHAPE OF THE SEISMIC WAVELET
I
E
-20 E
Frequency, Hz Fig.6.46 Change in wavelet spectrum from a VSP study. Both curves are normalized with respect to the highest amplitude. ( F r o m B a l c h a n d L e e , 1 9 8 4 :1 6 . )
6.6 Shape of the seismic wavelet 6.6.I De.sircdwavcletcharacteristit's An interpreterwould like to have seismicsections show simpleone-to-onerelationsto interfacesin the earth and as much detail as possible(maximum resolution), that is, sectionswhere beddingcontactsare sharply imaged at their correct locations, with no noise to confuse matters. To achieve short, sharp events requires a broad spectrum with good highfrequencycontent. To show it at the correct location requiresmigration and knowledgeof the embedded waveshape. To showthe contrastsat interfaces,amplitude valuesmust be faithfully preserved. If we think of a seismicwaveletas resulting from the superpositionof many harmonic wavesof different frequenciesand amplitudes (Fourier synthesis concept), we see that cosine waveswith zero phase shift will have maximum constructiveinterferenceat I : 0, thus producing the maximum possibleamplitude there.At certain other valuesof l. the waveswill add up to give smaller peak amplitudes but the broader the band of frequenciesincluded,the farther one has to go from r : 0 for theseto achieveappreciable amplitude. Higher frequenciesin the bandwidth are also necessaryto producea sharp peak. Thus, the desired waveshapeis best achievedwith a narrow zero-phasewavelet(fig. 6.48a)with minimal sidelobes to interferewith other events. Figure 6.48showshow the waveshapechangeswith the bandwidth characteristics.Note the increased
l8l magnitudeof the central peak comparedto any other half cycle and the increasedsharpnessof the central peak as the bandwidth widens (figs. 6.48a to 6.48e). Waveletsdo not changevery much as bandwidthsincreasebeyond about 2.5 octaves.Waveletsbecome leggy as the bandwidth slopesbecome steeper(figs. 6.48fto 6.48h).Two waveletshavingthe samespectral shape and number ol octavesbandwidth but whose spectraare displacedfrom each other along the frequency scale have the same waveshapes(exceptfor time scaling);the one with the lower frequenciesis simply broader in the time domain. Waveletshaving the samespectralshapeand bandwidth measuredin hertz rather than octaveshavethe sameenvelopebut differing number of cycleswithin the envelope(figs. 6.48i and 6.48j). In acquisition,we try to achieve higher frequenciesand broader bandwidths,but absorption and other mechanismsusually limit energy aboveabout 60 Hz. Most of the natural mechanismsthat affect the shapeof real wavelets($9.2.3)are minimum-phaseor nearly so (see Sherwood and Trorey, 1965). A minimum-phase wavelet(915.5.6a) is causal(that is, it is zero for negativetimes)and has the energyconcentrated in the early part ol the wavelet.Real wavelets are also causaland the first detectablepeak or trough is alwaysdelayedfrom the onsetof the waveletso that the picking and timing of arrival timesare alwayslate. Furthermore,as arrival times increase,the increased attenuationof the higher frequenciescausesthe spectrum to shift toward the low frequencies,so wavelets build up more slowly,and the delaysbetweenreflecCorrectcomtion onsetsand their detectionincrease. pensationfor delaysis very dilicult to achieve. The embeddedwavelet($9.2.3)after processingis sometimesapproximatelyminimum-phase,but often has a nearly constant-phasespectrum.Most displays in 1994attemptto achievezero-phasewavelets(whose phase spectra are identically zero and that are not causal).Antisymmetricwavelets(whosephasespectra are identically 90o; see fig. 6.48b) are also encountered frequently. The SEG standardpolarlly convention(fig. 6.49)for minimum-phasewaveletsis that, for a positivereflection (a reflectionfrom an interfacewherethe acoustic impedance increases),the waveform begins with a downkick, representedby negativenumbers,this has a historical basisand is almost universallyagreedto. For a zero-phasepositive reflection,the waveletcentral point of symmetryis a peak representedby positive numbers;a minority usethe oppositeconvention. Displays sometimesshow the opposite of the forepolarity). going (SEG negativepolarity or reverse 6.6.2Ricker v:avelet The embeddedwavelet($9.2.3)is often convertedto a zero-phase equivalent in processing ($9.5.9 and 15.5.6d).The embeddedwaveletis made symmetrical and the time scaleis shifted(but not alwavscorrectlv)
N
I E!
DOWNHOLEPHONE
!
z I F
) zul F F
ut
0.4 0.3 0.2
0.0
F
5 l = l o
' .';r.-.:.tJ. jai'1""'t*"r'v'''' .4, ;:..1. .
0.1
{.il
i
TI
f tl
tlt
tI
.l ,0
rl
IIIT
I
t.t
4000 DEPTH (ff)
Fig. 6.47
Cumulative attenuation as a function of depth Silt-sand intervals are shaded. (From Hauge, 1981
Time(ms)
o Frequcnc'y (Hz)
(a)
.,.i-=-l--:
Fr6quency (Hz)
Froquencf (Hz)
(b)
(c)
o
-l
AilA ^T . tF"^l/\lll\ ? " _F , , , V , ,V, ,1
Er
, Time(ms)
Timc (ms)
::l
Froqu.ncy(Hz)
FrequenryHz)
(0,
G),
Frequonc-y(Hz)
Fig. 6.48 Impulses filtered with various bandpasses(After Yilmaz. 1987: 23 4.) (a to e) Changing bandwidth by increastng the high-frequency cutoff; bandwidths are approximately 1, 1.5'
(h)
Frequonay (Hz)
o
Froquoncy (Hz)
.0)
2,2.3, and 2.6 octaves. (f to h) Changing filter slopes; slopes j) are approximately 120, 60, and 24 dB/octave' (i and Shifting frehigher to interval frequency same bandwidth containing the quencies.
NOISE
183
.".'r -..! + | Normal polarity
Rwerue polarity
(a)
Nomal polarity
t
ll
Reverse polarity
l
(
r
rr r
t
l
l
r
r
'
I
l
(
)
l
l
t fl
(bt
I
l
Fig. 6.49 Standard polarity. (a) For a positive reflection. a minimum-phase wavelet begins with a downkick, and (b) the center of a zero-phasewavelet is a peak.
so that the waveletcenter indicatesthe arrival time. Conversionto a zero-phaseequivalentdoes not solve problemswith time-varianteffects. The most common zero-phasewaveletis the Ricker v'avelet(Ricker,1940,1944,1953a), expressed in the time domain (fig. 6.50a)as f(t)
:
(l
-
2n2v2rt2)e
-6vrt)2,
(6.16)
or in the frequencydomain (fig. 6.50b)as F(v) : (2l1ln)@)1v' ,)et't'ut2,f(u) : 0,
(6.n)
where/(l) ++ F(u), and v, is the peak frequency(see problem 6.21). The distance between flanking side lobesin the time domain, To (fie.6.50a),is 7,,: {l6trttv,,. Also, Q : T,,,1ll 6.7 Noise 6.7.I Typeso.fseismicnorse The reliability of seismicmapping is strongly dependent upon the quality of the records.The quality of seismicdata variestremendouslyfrom areaswhereexcellent reflections (or refractions) are obtained to areasin which the most modern equipment,complex field techniques,and sophisticateddata processingdo not yield usabledata (often called NR areas,that is, "no reflections"). areasof In betweentheseextremes lie most areasin which usefulresultsare obtained.but
the quantity and quality of the data could be improvedwith beneficialresults. We use the term signalto denote any event on the seismicrecord from which we wish to obtain information. Everything else rs noise, including coherent eventsthat interfere with the observationand mearatio, abbrevisurementof signals.The signal-to-noise ated S/N is the ratio of the signal in a specifiedportion of the record to the total noise in the same portion. Poor records result wheneverthe signal-tonoiseratio is small;just how small is to someextenta subjectivejudgment. Nevertheless,when S/N is less than unity, the record quality is usuallymarginal and further. deterioratesrapidly as the ratio decreases Seismicnoisemay be either(a) coherentor (b) incoherent. Coherentnoise can be followed acrossat least a few traces;incoherentnoiseis dissimilaron all traces, and we cannot predict what a trace will be like from a knowledgeofnearby traces.The differencebetween coherent and incoherent noise is often a matter of scale and if we had geophonesmore closely spaced incoherentnoisewould be seenascoherent.Nevertheless,incoherentnoiseis definedwith respectto the records being usedwithout regardfor what closerspacing might reveal. Incoherentnoiseis often referredto as randomnoise (spatially random), which implies not only nonpredictability but also certain statisticalproperties;more often than not the noise is not truly random. (It should be noted that spatial randomnessand time randomnessmay be independent;the usual seismic trace is apt to be random in time becausewe do not know when a reflectionwill occur on the basisof what the trace has shown previously,with the exceptionof multiples. Coherentnoiseis sometimessubdividedinto (a) energy that travelsessentiallyhorizontally,and (b) energy that reachesthe spread more or less vertically. Another important distinctionis between(a) noise that is repeatable, and (b) noisethat is not; in other words.whetherthe samenoiseis observedat the same time on the same trace when the sourceis repeated. The threeproperties-coherence,traveldirection,and repeatability- form the basisof most methodsof improving record quality. Coherent noise includessurfacewaves,reflections, or reflectedrefractions from near-surfacestructures suchas fault planesor buried streamchannels,refractions carried by high-velocitystringers,multiples,and so on (Olhovich,1964).All of the precedingexcept multiplestravel essentiallyhorizontally and all are repeatableon successive sourceactivations. Incoherent noise, which is spatially random and also repeatable,is due to scatteringfrom near-surface irregularitiesand inhomogeneitiessuch as boulders and small-scalefaulting; such noise sourcesare so small and so near the spreadthat the outputs of two geophoneswill only be the samewhen the geophones are placedalmost sideby side.Nonrepeatablerandom noisemay be due to wind shakinga geophoneor caus-
C H A R A C T E R I S T I C SO F S E I S M I C E V E N T S
184 t
r
l
o
l
r
'
equivalentto frequencyfiltering (fig. 6'51)' In this operation, low-frequencycomponentsmainly interfere constructively,whereas high-frequencycomponents tend to interferedestructively.This type of summing is apt to occur in the ground mixing of geophones within arrays or sourcesin sourcearrays,but it also occursin vertical stackingand other typesof stacking in processing.
l
l
6.7.3 Methodsof'attenuatingnoise
(b) Fig. 6.50 Ricker wavelet. (a) Time-domain representationand (b) frequency-domain representatton.
ing the roots of trees to move. generatingseismic waves,stonesejectedby a shot and falling back to the earth near a geophone,a personwalking near a geophone.and so on. 6.7.2 Stut'kingt()ull(nuul('rundomnoi'se If we add severalrandom noisestogether,therewill be somecancellationbecausesomewill be out of phase with others.Assumethat we have n geophones,each of which is respondingto coherentsignalS but has on it' A measurement randomnoiseN, superimposed -r,will then be r,:
S + N,'
The averageis our best estimateof the signal and we identify the standard deviation o with the noise, so that
s=;:llx.
N=o,
o,:12{r,- ")': )>*; The signal-to-noiseratio, S/,{ is thus
s:i: N
o
t (llntt' )(\l{i)tt1
n"-x
(rlf ),/l
(6.18)
As n becomeslarge,o approachesa limit that depends on the statisticaipropertiesof the noise; hence' for random noise, the signal-to-noiseratio varies as /'rlr for rularge. Sumniing a number of identical traceswhere there are small random timing differencesamong them ls
Becausethere are many types of noise,various noiseattenuatingmethods are employed.All are basedon noiseand of the differencesbetweenpropertiesof the"signal" is somesignal.Inasmuchas the nature of and signal both properties of what subjectiveand the attenuation noise known, not completely nolse are cannot be comPletelYobjective. Noise attenuationbeginswith the field recording' To the extent that noise has appreciableenergyoutsidethe principalfrequencyrangeofthe signal,it can be attenuatedby limiting the frequenciesrecorded' Very low-frequencycomponents(suchas high-energy ,u.iu". wavesrich in low frequencies)may be filtered out during the initial recordingprovided the low frequenciesare suliciently separatedfrom the reflection fiequencies.However, if the spectrum of the noise ou.ilupt the signal spectrum,then frequencyfiltering is of limited value in improving record quality' The dynamic rangeof field instrumentstoday is usually sufficiently wide that often the only low-frequency filtering used in the field is that resulting from the limited low-frequencyresponseof the geophones' filteringemLikewise,often the only high-frequency ployed is that required to prevent aliasingin digitizing. Cancellationof random noisedoes not place any restrictionson geophonelocations(exceptthat they cannot be so closetogetherthat the noiseis no longer spatially random). If we connect together, for exzrmple,16 geophonesthat are spacedfar enoughapart thai the noise is spatially random but still close enoughtogetherthat reflectedenergytravelingalmost in phaseat all 16 geophones' verticallyis essentially the sum of the l6 outputswill havea signal-to-noise ratio four times greaterthan the output when the geophonesare placedsideby side.If, on the other hand' we are attenuatingcoherentnoise and the 16 geophones are spread evenly over one wavelengthof a coherent-notsewavetrain (for example' ground roll)' then the coherent noise will be greatly reduced (see considerations $8.3.6 and problem 8.6b). Similar sources' multiple of arrays of use the to apply 'The contributionof noisecoming from the sideof the line hasgenerallybeenunderestimated'We cannot deal properiy with data arriving from off to the side of thi line unlesswe recorddata to the sideof the line' Areal arrays ($S.3.8)are sometimesused effectively for attenuatinghigh-angleoff-the-line noises'Major
P R OB L E M S
185 versally used is very effectivein attenuating several kinds of noise.The summationtracescompriseenergy from several sourcesusing different geophone and sourcelocations.The field techniquewill be discussed in $8.3.3and the processing(which is usually done in a processingcenterrather than in the field) in $9.10.4. A number of other noise-attenuatingtechniques (such as apparent-velocityfiltering) are also applied in processingand describedin chap. 9. In fact, most of the operationsdone in seismicprocessinghave the attenuationofnoise as their principal objective.Their application has the advantageof trial and error and subjectivejudgment is usually a factor in deciding which processesto employ and which parametersto vary.
F'ig. 6.51 Filter effect of timing errors in stacking. The numbers on the curves are standard deviations of the timing differc n c e sa m o n g t h e t r a c e ss t a c k e d .
noise attenuationresults from 3-D recording and processing. Noise can also be attenuatedby adding together traces recordedat different times or different places or both. This forms the basisof severalstackingtechniques,includingverticalstacking,common-midpoint stacking,uphole stacking,and severalmore complicated methods.The gain in record quality often is largebecauseof a reductionin the levelof both random and coherent noise. Provided the static and NMO correctionsare accuratelymade, signal-tonoiseimprovements for randomnoiseshouldbe about 5 (or l4 dB) for 24-fold stacking. Vcrticalstacking involvescombining together several recordsfor which both the sourceand geophone locationsremainthe same.It is extensively usedwith weak surface energy sources and many marine sources(see$7.2.4and 7.4).Verticalstackingusually impliesthat no trace-to-trace correctionsare applied, but that correspondingtraceson separaterecordsare n.rerelyadded to each other. The effect, therefore,rs essentially the sameas usingmultiplesourcessimultaneously.In difficult areas,both multiple sourcesand vertical stackingmay be used.In actual practice,the surfacesourceis moved somewhat(3 to l0 m) between successive recordings.Up to 20 or more separate recordsmay be vertically stacked,but the stacking of many recordsbecomesexpensiveboth in field time and in processing,whereasthe incrementalimprovementbecomessmall after the first few. Vertical in subsestackingis oftendonein the field,sometimes quent processing.Marine vertical stacking rarely involvesmore than four recordsbecause,at normal ship speeds,the ship movesso far during the recordingthat the data are smearedwhen stacked;smearingmeans that the changesin the reflectingpoints affect the arrival times so much that the signal may be adversely affectedby summing (the effect is similar to using a very fargegeophoneor sourcearray). The common-midpointmethod that is almost uni-
Problems 6.1 In table 6.2, classifydifferent types of eventsand noiseon the basisof commonlyobservedcharacteristics. 6.2 A salt dome is roughly a vertical circular cylinder with a flat top of radius400 m at a depth of 3.2 km. If the averagevelocity abovethe top is 3.8 km/s, what is the minimum frequencythat will givea recognizable reflectionfrom the dome? 6.3 (a) Use Fermat'sprincipleof leasttime to derive the law of reflection($2.7.5).(Hint: Expressthe traveltime for the reflectionSMR in fi9.6.52in termsof the variabler, then set dtld-r equal to zero.) (b) Repeatpart (a) for the refractedpath SMQ. (c) Repeatparts (a) and (b) for reflectedand refracted convertedS-waves, thus verifyingeq. (3.1). 6.4 Redrawfig. 6. l6b for a planewaveincidenton the reflector,and explain the significanceof the changes that this makes. 6.5 (a) Show that the slope of the diffraction event with sourceS, in fig. 6.23bapproaches+ llV for large x. (Hint: Expandthe expression in eq.(6.I I ) for r >> h.) (b) What is the slopeof the asymptotefor fig. 6.23d? 6.6 Assume that fig. 6.34 shows relative amplitudes correctly (divergencehaving been allowed for). The water depth is 420 m and the velocity below the sea floor 2590m/s. (a) lf the reflectioncoefficientis maximum at the critical angle,on what traceswould you expectthe maximum amplitude for the first, second,third and fourth multiples? (b) What should be the ratio of the amplitude of the successive multipleson the short-offsettrace?How do thesecalculationscompare with observations?What unaccounted-forfactors affectthis comparison? 6.7 (a) Given that 0 ( c < f I in eq. (6.15)for the directivity resultingfrom ghosting,discussthe conditions under which the amplitude of rf, is zero. (b) For a source below the base of the low-velocity layeq compare the amplitude and energy of ghosts generatedat the baseof the low-velocitylayer and at
C H A R A C T E R I S T I C SO F S E I S M I C E V E N T S
186 of events Table6.2 Characteristics
:0
g
E
E a
s^ i
b c
i
\
t
o:
9
E
=
F
,
r
:u
6
F
.
:
e
i
E
e ?
:
=.
g s s g €E = : i ! ! a
"
: 9 &E -i
-=
-
-
p E
9
j
Ed : ; t g p ; , . E Z = 9 + at .
e . ! 4 + d d
8 zy C E
E u f : t b: f -
E
. g
&
t
E
&
g
F
i
2
r
e
F A
c
c
2 F =E E+
-
*: gc Ea
H
;o , E
u
F F g . e r - e ' 3 ' . a E H - e= ; * zE := zg z$ Eo of i =
E + s E a
=
8
a
E
>
,
i
-
' =
.
:
i
E
E
9
8
i
= 9
i
9
i
t 9
i
r
i
e
q
7
.
i
,
'
Primary reflections,dip ;
>-
{
I
+
Curvature of cohcrcnt lrne-up across record due to normal moleout: arrrval on tracc I before arrrral on trace 24 6indicares dip
aj
t 3F
Lnrelope o[ a lracecontaln\ lhe trace
=4
Fig.7.45
Seismicrecord (playback). Courtesy of Chevron.)
Compact l2-24-channel signal-enhancement seismic recordersare availablefrom severalmanufacturers; one is shown in fig. 7.43b. Signal enhancemenl meansthe ability to vertically stack a number of individual records.Theserecordersinclude 12-15-bitdigitizers and storedata on floppy disks.Their frequency rangeis 3 to 5000Hz and they can sampledata at 0.5 ms. They display data both on graphic displaysand
hard copy using thermal printers.They weigh l5 to 25 kg and severalare expandableup to 120 channels. Some also include some processingcapability facilitating refraction interpretation or application of NMO correctionsto reflectiondata. Simplifiedtimersare sometimesusedin engineering refractionwork; they measureonly the traveltimesof the first arrivalsand displaythem in digital form.
RECORDING
s-------vr Low.cut filters
2
Fro 1 4A
,
4
6
l0
20
3040 60 Frequency( Hz)
Response of seismic filters in typical
|
l6_bit system.
Inputs from n channels(n usually 24 to l2O)
each channelin sequence
Analog-to-digital (A I D) conv erter l4 bits plus sign bit
Tape transport lread-after-writg
al-to-analog((D/A; converter
Paperrecord
ry
Fig.7 .47
Block diagram of digital recording system.
7.6.6Display The data recorded on magnetic tape must be pre_ sentedin visual form for monitoring and interpreta_ tron.The classiccameraconsistsof (l) a seriesof gal_ vanometers, one for each geophone group, that transformsthe electricalsignalsinto intensespots of light moving in accordancewith the signals,1i1a Ae_ vice for recording accurate time marks, and (3) a
means.for recordingthe positionsof the light spotson a moving pieceof paper.Historically,this was iccom_ plished mainly by photographic methods. More widely used today are electrostaticcameraswherern the light spot producesan electricchargeimage and printing powder adheresto the paper whereverit is charged.This dry-write processusesordinary paper, which is cheaperthan photographic paper and also
EQUIPMENT
(From (IFP)amplifier. floating-point Fig.7.48 Instantaneous 1984:177.) Pieuchot,
dispenseswith liquid developer-fixersolutions.Some plotters, especiallythose in fixed installations,are of the raster type wherein a matrix of very fine dots is usedto createthe image;a very fine beam of light (often from a laser)is sweptacrossthe paper,the beam being turned on and off very rapidly to produce the dots. With a raster plotter, the information from the variouschannelsis formattedin a microcomputerand are no longer used.lnk-jet individualgalvanometers plotters,whererasterdots are sprayedonto the paper, are sometimesused,especiallyto producecolor plots. Each individual graph representingthe averagemotion of a group of geophonesis called a truce. A simple graph of amplitude against arrival time is called a wiggly trace mode of display (fig. 7.49c). Where part of the area under a wiggly trace curve ls blacked in, the display is called variable-areu(fig. 7.49b);usuallypositivevalues(peaks)are blackedin. Sometimesthe light intensityis variedinsteadof the mode light-spot position to produce vuriable-densi4: ,f:9.1.a9il. Modes are also sometimessuperimposed (figs.7.49a and7.49e). Conventional black-and-white, variable-area/ wiggle-tracedisplayshavethreeseriousshortcomings: (a) black peaks and white troughs look so different that an interpreteris biasedtoward the peaks,neglecting the information in the troughs, and it is very difficult to comparethe relativeamplitudesof a peak and adjacent trough becausethey look so different; (b) high-amplitude peaks are clipped so that their magnitudesare lost; and (c) horizontal positions are carried sidewaysby the trace excursions.A color disBy play (e.g.,Plate2) correctsfor theseshortcomings. seeingadjacentpeaks and troughs with equal clarity, reflectionsfrom the top and bottom of a reservoircan often be recognizedbecausetheir amplitudesvary in unison. The mode of displayand parameterchoicesgreatly affectwhat an interpreterseesin the data. Among display parametersare horizontal and vertical display scalesand trace spacing;width, amplitude, and clip level (maximum amplitude that can be plotted) of wiggly traces; degree of blackness,bias (minimum value, which will be blacked in) and clip level of variable-areatraces;and so on. Usually,the effective
t
=w
[Jlilt]illllill F i g . 7 . 4 9 M o d e s o f d i s p l a y i n gs e i s m i cd a t a . ( C o u r t e s yo f G e o Space.)(a) Wiggle superimposed on variable area, (b) variable area, (c) wiggle. (d) variable density, and (e) wiggle superimposed on variable density.
vertical scale(time scale)is greaterthan the horizontal scale,that is, sectionsare horizontallycompressed.The vertical scaleis, of course,variablewith depth when time is plotted linearly,as is usuallythe case.Scaleratios of approximately1:l are most helpful when making a structural interpretation, but considerable vertical exaggeration is often used for a stratigraphicinterpretation.Color is sometimes superimposedon sectionsto display additional information. Problems 7.1 The velocity of radio waveshas the following values (km/s) over various terrains: normal sea water, 299,610: fresh water, 299,250; normal farmland, 299,400; dry sand, 299,900l-mountainous terrain, 298,800.Ifrange calculationsare basedon travel over normal seawater,what are the errors in rangeper kilometerof path over the various terrains?
PROBLEMS l3)
7.2 If the error in Shorantime measurements is -r 0.I p.s,what is the sizeof the parallelogramof error in fig. 7.3when (a) 0 : 30oand (b) 0 : 150.?Takerhe veloc_ ity of radiowavesas 3 X lOskm/s. 7.3 A satelliteis in a stableorbit around the Earth when the gravitationalforce(mg)puiling it earthward equalsthe centrifugal forcemV2lR, where.s is the ac_ celerationof gravity,m and V the satelliteimass and velocity, respectively,and R the radius of its orbit about the centerof the Earth. (a) Determinethe accelerationof gravity at the orbit -Earth, of a Transit satellite1070km abovethe know_ ing that g at the surfaceof the Earth is 9.gl m/s, and that the gravitational force varies inversely as the squareof the distancebetweenthe centersof gravity of the masses. (b) What is the satellite'svelocity if its orbit is stable? (c) How long doesit take for one orbit? (d) How far away is the satellitewhen it first emerses overthe horizon? (e) What is the maximumtime of visibilityon a single satellite pass?(Assume the radius of the Earth is 6 3 7 0k m . ) 7.4 Sieck and Self (1977)summarize,,acoustrcsvs_ tems,"as shown in table7.2. For each of thesecalcu_ latethe following: (a) The wavelengths. (b).Thepenetrationgivenby Denham,srule (gg.3.l l) and reconcilewith the statedpurposes. (c) Trade literature claims 30-cm resolution with im_ plodersand 2-5-m resolutionwith sparkers.How do these figures compare with the resolvablelimit ({i6.4.2)? (Note that absorptionin wateris very small, so that effectively absorptiondoesnot beginuntit the seafloor is reached.) 7.5 (a) An explosioninitiatedat the top of a column of explosivesof length atr. travelsdown the column with velocity 4. By comparison with the same amount of explosiveconcentrated at the centerof the column and explodedinstantaneously at the same time as the column,showthat the array response .Fis s i n c .F: [ n a ( s i n0 t ) V , l V , ) ] , \being the velocityin the rock,and 0,,the sameas ln fig. 7.14a.Under what circumstances boesthis result reduceto that of eq.(7.4)? (b) Calculate,Ffora column l0 m long giventhat : \,
= 2 . 1 k m / s ,a n d 0 o: 0 o ,3 0 o , ! 9 ^ , V , : 5 . 5 k m / s ,4 60.. 900. (c) If the column in (b) is replacedby six charges, each 60 cm lo.ng,equallyspacedto give a total len;th of l0 m, the chargesbeing connectedby spiralsof-detonat_ ing cord -with velocity of detonation 6.2 km/s, what length of detonating cord must be used berween adjacent charges to achieve maximum directivity downward? (d) What are the relativeamplitudes(approximately) of the waves generatedby the explosivesin (c) at angleso,, : 0o, 30o,60o,and 90owhen L- : 40 m? 7.6.Imaginean impulsivesourcestriking the ground at trmes nA apart, where r is a random number be_ tweenl0 and 20,and A is the samplinginterval.Given reflectionswith amplitude+5 at O,7Z at 5A, -l at l3A, +3 at 29L, +t at 33A, and -2 ar 42A^. add the reflection sequenceas would be done with Sosiere_ cording($7.3.2) for 10,20, and 30 impulsesto seehow the signalbuildsup as the multiplicityincreases. 7..7 How much energyis released(approximately)by thg lir eun arrayin fig.7.28cwhenthe initial pressure is 2000psi (14 MPa). (Energyreleased: work done by the expandinggas : J g d Z; Assumethat the changeis adiabatic,that is, gV' o : constant.the final pressureis 2 atmospheres,and that the guns are far e n o u g ha p a r tt h a t t h e yd o n o t i n t e r a c t . 7.8 The dominant period of a marine seismicwave_ shapeis often determinedby the sourcedepth, that is, by_thesecondhalf-cyclebeing reinforcedby the ghost reflectedat the surface.Assumingthat thij is true for the sourcesignaturesshown in fig. 7.30, determine their depths. 7.9 If we wish to take it into accountapproximately the small term L d3/dl3 in eq. (7.9) (still neglecting other terms involving L), show that for a harmonic wave, lt can be included in the term involvins /l in e q .( 7 . 1 2 ) . 7.10 A 96-channel streamerwith 25-mgroupshasthe hydrophonesspaceduniformly throughout its length. The lead-in and compliant sectionstogether are 200 m in length and the tail sectionand buoy connection are 150 m. Assumea ship'sspeedof 5.g knots (3.0 m/s) and a current perpendicularto the direction of traversewith a speedof 1.9knots. (a) What are the perpendicularand in-line compo_ nentsofthe distanceto the farthestactivegroup with
Table 7.2 Acoustic.systems System Fathometers Water-columnbubbledetectors Side-scansonar Tuned transducers Imploders Sparker
Frequency(kHz)
r2 80 2
l f
38 250 3.5-7.0 0 . 85 . 0 0.04-0. 15
Purpose To map water bottom To locatebubbleclusters,fish, etc. To map bottom irregularitres To penetrate30 m To penetrate120m and find gas-charged zones To map to 1000m
236 respectto the traversedirection? (b) Ifthe velocityto a reflector2.00km belowthe ship is 3.00km/s and if the reflectordips 20'perpendicular to the traversedirection: (i) By how much will the arrival time be changed for the far trace? (ii) If this should be attributed to a change in velocity rather than cross-dip,what velocity would it imply? (c) Assume that the amount of streamerfeathering (drift of the streamerto one side) is ascertainedby radar sighting on the tail buoy with an accuracyof only -r3o' (i) How much uncertaintywill this produce in locating the far group? (ii) How much change in arrival time will be associatedwith this uncertainty? (d) Over what distancewill the midpoint tracesthat are to be stackedwhen making a CMP stack be distributed? 7.11 Use figs. 7.35 and 7.46 to determine the filter equivalentto a geophonewith v0: 10 Hz and h : 0.7 feedinginto an amplifier with a l0-70-Hz bandpass filter and a 4-ms aliasfilter. 7.12 Figure 7.50illustratesfilter characteristics. Evaluate the importance of (a) low-frequency cut, (b) high-frequencycut, (c) bandwidth,and (d ) filter slope on; (i) time delay to a point that could be timed reliably;(ii) apparentpolarity;and (iii) ringing.The conclusionscan be generalizedfor filters of other design types. 7.13 Figure 7.51 showswaveshapechangesproduced by the analog filtering in modern digital instruments. What can you concludeabout the effectson picking? 7.14 Express the numbers 19 and l0 as binary numbers. (a) Add the binary numberstogetherand convertthe sum to a decimalnumber. (b) Multiply the two binary numbersand convert to decimal. (Note that mathematicaloperationsare carried out in binary arithmetic in the sameway as in decimalarithmetic.) 7.15 Assume a 96-channelseismicsystemrecording with 2-ms samplingand 25-sVibroseisrecords.What is the data rate (samples/second) and the number of bits/record?How doesthe data rate comparewith the capacityof a 9-track magnetictape moving ar a 6250How many bits bytes/inchrate, using 4 bytes/sample? of memory are requiredto store one channelof data? What is the effectof the headerand ancillarv information, and parity bits? References Andrew, J. A. 1985.The art and scienceofinterpreting stratigraphy from seismic data. ln Seismic Exploration of the Rocky Mountain Region,R. R. Gries and R. C. Dyer, eds.,pp. 95 104. Denver: Rocky Mountain Association of Geologists and the Denver Geophysical Society.
EQUIPMENT
bottom cable. Paper read at the 59th Society of Exploration G e o p h y s i c i s t sA n n u a l M e e t i n g . Barr, F. J., R. N. Wright, W L. Abriel, J. I. Sanders.,S. E. Obkirchner. and B. A. Womack. 1989. A dual-sensor bottomcable 3-D survey in the Gulf of Mexico. Paper read at the 59th Society of Exploration GeophysicistsAnnual Meeting. Bedenbecker,J. W., R. C. Johnston, and E. B. Neitzel. 1970. Electroacoustic characteristicsof marine streamers. Geophvsics,35: 1054-72. Brede, E. C., R. C. Johnston, L. R. Sullivan, and H. L. Viger. 1970. A pneumatic seismic energy source for shallow-water/ marsh areas. Geophys Prosp, 18: 581-99. Burns, R. F.1992. GPS receivers- A directory. Sea Technologl' (March):13-18. Dennison, A. T. 1953.The design ofelectromagnetic geophones. Geophys.Prosp., l: 3-28. Dixon, R. C. 1992. Global positioning system. ln Entyclopedia of Earth System Science,W A. Nierenberg, ed., pp. 395 407. New York: Academic Press Evenden, B. S., and D. R. Stone. 1971. Seismit Prospetting In' struments, Vol. 2: Instrument Perlormante and Testing. Berlin: Gebruder-Borntraeger. F a r r i o l , R . , D . M i c h o n , R . M u n i z , a n d P S t a r o n . 1 9 7 0 .S t u d y and comparison of marine seismic source signatures. Paper read at the 40th Society of Exploration GeophysicistsAnnual Meeting. Geyer, R. L. 1989. Vibroseis,Geophysics Reprint Series.Tulsa: Society of Exploration Geophysicists. Giles, B. F 1968. Pneumatic acoustic energy source. Geophys. Prosp.,16z21 53. Goupillaud, P. L. 1976.Signal design in the Vibroseis technique. Geophysics,4l: l29l 1304. H a r r i s o n , E . R . , a n d L . M . G i a c o m a . 1 9 8 4 .A n e w g e n e r a t i o n air gun. Paper read at the 54th Society of Exploration CeophysicistsAnnual Meeting, Atlanta. Ingham, A. 1975.Sea Surve.ying.New York: John Wiley. Jensen.M. H. B. 1992.GPS in offshore oil and gas exploration. 4. The Leuding Edga, ll(ll):30 Kramer, F S., R. A. Peterson, and W C. Walters, eds. 1968. Seismit Energy Sources- 1968 Handhutk Pasadena:Bendix United Geophysical. Kronberger, F. P, and D. W Frye. 1971. Positioning of manne surveyswith an integrated satellitenavigation system. Geophys. Prosp.,19:487 500. Lamer, A. 1970. Couplage sol-geophone. Geophvs.Prcsp., 18: 300-l 9. Mayne, W H., and R. G. Quay. 1971.Seismicsignaturesof large l162-73. air guns. Geophysics,36:. McQuillin, R., M. Bacon, and W Barclay. 1979.An Introdut'tion to Seismic Interprelation. Houston: Gulf Publishing Co Miller, G. F., and H. Pursey. 1956. The field and radiation impedance of mechanical radiators on the free surface of a semiinfinite isotropic solid. Proc Royal Soc., A-2232321. Miller, R. O., S. E. Pullan, J. S. Waldner, and F. P Haeni. 1986. Field comparison of shallow seismic sources. Geophysit's,5l: 2067-92.
Barbier, M. G., and J. R. Viallix. 1973. Sosie - A new tool for marine seismology.Geophysics,3S:673 83.
Mossman, R. W., G. E. Heim, and F. E. Dalton. 1973.Vibroseis applications to engineeringwork in an urban area. Geophysit's, 38: 489-99.
Barr, F J., and J. I. Sanders. 1989.Attenuation ofwater-column reverberationsusing pressureand velocity detectorsin a water-
Musser, D. D. 1992. GPS/DGPS in offshore navigation. positioning. Sea Technology(March): 61-6.
R E F E RE N C E S
O-60 Hr
6-60 Hr
18-6OHr
d-l-
6-36 Hr
6-50 Hr
6-@ Ht
;
l-
'tf_
*t-
t----
Fig. 7.50 Impulse responsesof minimum-phase filters. The respectiverows differ in filter slopesand the columns in passbands
(spccified by 3-dB points). (Courtesy of Grant-Norpac.) Efl'cct o f ( a ) l o w - c u t f i l t e r i n g a n d ( b ) h i g h - c u tl i l t e r i n g . Potler. M. C.. and J. L. Coldberg. 1987.Muthcmutirul Methotl,r. E n g l e w o o dC l i f l s , N . J . : P r e n t i c eH a l l .
0.2
I
P o u l t e r ,T . C . 1 9 5 0 .T h e P o u l t e rs e i s m i cm e t h o d o l - g e o p h y s i c a l e x p l o r a t i o n .G e o p h . r , s i cl 5s :. l 8 l 2 0 7 . P r o l f i t , J . M . 1 9 9 1 .A h i s t o r y o f i n n o v a t i o n i n m a r i n e s e i s m i c data acquisition. Thc Lcutling Edgc, l0(3):24 30 R a y l c i g h ,L o r d . I 9 l 7 . O n t h e p r e s s u r ed e v e l o p e di n a l i q u i d d u r ing tlre colfapsc of'a sphcrical cavity. Phil. Mug., 34: 94 8. S c h e r b a t s k o yS, . A . . a n d J . N e u l ' e l d . 1 9 3 7 . F u n d a n r e n t a lr e l a tiorrs in seismometry.Gutph.t'.ricl; 2: 188 212. S c h u l z e - G a t t e r m a nR . . 1 9 7 2 .P h y s i c a la s p e c t so f t h e a i r p u l s e r as a seismiccnergy source. Gaoph,t,,s. Pntsp.,20; 155 92. Sherifl. R. F.. 1974.Navigation requiremenls fbr geophysicalexploralion. Gcophys.Pntsp.. 22: 526 33. Sherifl, R. E,. l9ll9. Gutph.rsitul Methut,s. Englewood Cliffs, N . J . : P r e n t i c eH a l l . SherifT.R. E. I990. Entvktpcdit Dittionur.t of E.rplorution Gu> p / r l s l r ' . r3 d e d . T u l s a : S o c i e t yo f E x p l o r a t i o n G e o p h y s i c i s t s . S i e c k . H . C . , a n d G . W S e l l . 1 9 7 7 .A n a l y s i s o l ' h i g h - r e s o l u t i o n seismicdata. ln ^Str.rnrrlStftttigfttphl Applitutiort.sto Htdroturhon E.rpktrutiott, C. E. Payton. ed., pp. 351 86, AAPG M e m o i r 2 6 . T u l s a :A m e r i c a n A s s o c i a t i o no f P e t r o l e u mG c o l o gists. S p r a d l e y ,H . L . . 1 9 7 6 .A n a l y s i so f p o s i t i o n a c c u r a c i e sl r o m s a t ellite systenrs I, 1976 update. ln 1976 Olfslnre Tet'hrutlog.r' Conferenre Prt'prints, paper 2462. Dallas: Offshore Technology Conf'erence.
F i g . 7 . 5 1 F a r - f i e l d a i r - g u n s i g n a t u r e st h r o u g h v a r i o u s i n s r r u m e n t f i l t e r s .( a ) N o e x t r a f i l t e r i n g ;( b ) o u t 1 2 4 H z , l 8 d B / o c t a v e : ( c ) o u t 1 2 4 H 2 , 7 2 d B l o c t a v e ;( d ) o u r 6 2 H L l B d B / o c r a v e ;( c , 8 l 2 4 H z w i t h s l o p e so f l 8 a n d 7 2 d B / o c t a v eo n l o w - a n d h i g h f r e q u e n c ys i d e s ,r e s p e c t i v e l y(;f ) l 8 1 2 4 H z w i t h l 8 a n d 7 2 d B / octave slopestand (g) 8 62 Hz with 36 and 72 dB/octave slopes. Timing marks are l0 ms apart.
Parkes, G.. A. Ziolkowski, L. Hatton, and T. Haugland. 1984. The signatureofan air gun array: Computation from near-field measurements including interactions Practical considerations. Geophl sic.r,49: 105- I I . Pieuchot, M. 1984. Handbook oJ Geophv.sical Explorution, hl. 2 : Sei.smitInstrumentatiotL London: Geophvsical Press.
urul Nuvigution./or Geophl,sicul Spradley.H. L., 1984. Surve.t'irtg E.rplorutiort. Boston: International Human Resources Development Corp. W a s h b u r n ,H . W . 1 9 3 7 .E x p e r i m e n t a ld e t e r m i n a t i o no f t h e t r a n sient characteristicsof seismograph apparatus. Gt'opltl'sit.t,2: 213 52. Waters, K. H. 1987. Refettion Seisnnlog.t',3d ed. New York: John Wiley. Whitfill. W. A. 1970.The seismicstreamer in the marine seismic system. In 1970 Oll.shore Technology Con/erence Preprint,s, paper 1238. Dallas: Offshore Technology Conference. W i l l i s , H . F r .1 9 4 1 . U n d e r w a t e r e x p l o s i o n s T i m e i n l e r v a l b e tween successiveexplosiolts.British Report, WA-47: 21. Wood, L. C., R. C. Heiser,S. Treitel, and P L. Riley. 1978.The debubbling of marine source signatures. Geophysits, 13: 715 29.
238 Ziolkowski, A. 1980. Source array scaling for wavelet deconvolution. Geopl1,s.Prosp.,28: 902 18. Ziolkowski, A. 1984.The Delft airgun experiment. Firsr Break, 2(6):9 18.
EQUIPMENT
Ziolkowski, A.. G. Parkes, L. Hatton, and T. Haugland. 1982. The signature ofan air gun array: Computation from near-field measurementsincluding interactions. Geophysit.s, 47: l4l3 21.
8
Reflection field methods
Overview
Refraction data acquisitionis discussedseparately in chap. ll, 3-D acquisition in chap. 12, and S-wave,verticalseismicprofiling, and crossholeacquisition in chap.13.
Fieldmethodsfor the acquisitionof seismicreflection data vary considerably, dependingon whether the area is land or marine,on the natureof the geologic problem,and on the accessibility of the area.One of the most important aspectsin cor.rtrolling data costs 8.1 Basic considerations is avoidingdelayssuchas whensomephasesof opera8.1.I Data acquisition tions have to wait on other phasesbeforework can begin. High-qr-rality field work is essentialbecause Virtuallyall seismicacquisitiontodayis perlbrmedby nothingdone subsequently geophysicalcontractors, either for oil- or gascan remedydefectsin the b a s i cd a t a . E v a n s( 1 9 8 9 )a n d P r i t c h e t t( 1 9 9 0 )d e a l basislor subsecompanyclientsor on a speculative with fieldtechniques. quent sale.The latter probablyconstitutes20 to 25"1, The organizations of field crewswho acquireseisof U.S.acquisitionsas of 1994.Acquisitionmethods mic data and proceduresfor carryingout surveysare havebecomefairly standardized and,contraryto eard e s c r i b e dT. h e c o m m o n - m i d p o i n(tC M P ) m e t h o di s lier beliefs,clients generallyno longer believethat the field n.rethodusedalmostexclusively today.Usutheir own fieldmethodsprovidea significantcompetially,onewantsdatato be acquiredin the samemanner tive edge over their competitor's.Speculativedata along straightlir.resso that observedchangesin the costsconsiderablylessbccausecostsare distributed data may bc ascribedto geologicratherthan acquisiover severalclients,and lower unit costspermit acquiringmoredata.Wheretractscomeup for competition changes.Practicalconstraintsthat restrictacquisitior.r are discussed. tive bidding,companiesotien t-eelthat they have to An array of- geophonesusually l-eedseach data buy most availabledata to avoid the possibilitythat char-rnel; sourcearrays are also often used. Arrays their competitionhasan advantage. haverespclnse characteristics that dependon the specThe clatathat resultfiom wclrkdonelbr a soleclient trum and velocityof a waveand the directionfiom belongto the client,who can usethe data exclusively, which it comes;thesepropertiesare usedto attenuate trade the data fbr data owr.redby others,or sell the surveysbelongto the certaintypesof noise.The selectionof field paramedata.The data lrom speculative ters dependson both geologicobjectivesand noisc contractorwho paid for them or to the groupof comparriesthat subsidizedthe acquisition.The terms of conditions.Specialsituationsand objectivessomeas to timesrequirespecialtechniques, suchas undershootsaleusuallyplacerestrictionson the purchasers ing, crooked-linc,extendedresolution.and uphole who is permittedto seeand usethe data and also resurveys. strictionson luture salesby the data owners.In some Marine surveysacquiredata at a very fast rateand countries,data go into the public domain after some high hourly cost. fundamentalfacts that distinguish specifiedperiodol time. marine operations.Shallow water and obstructions Most acquisitionin the United Statesin 1994is on sometimescontrol acquisition.Specialmethodsmay a turnkeybasis,wherepaymentis on a per data-unrt be requiredin the transitionregionnear a coastline, basisratherthan a time-requiredbasis. composingthe surf zone,beach,and lagoonalareas ir.rlar.rd from the beach;in this zone.environmentsgen8.1.2 Crev'organi:ution erally changerapidly. Correctionshave to be made lor elevationand Seismiccrewsdiffer greatly in size,ranging lrom two weatheringvariationsto preventthem from influencor three people for a shallow land survey for engiing (distortingand sometimescompletelyobscuring) neeringobjectivesto more than a hundred peoplefor the reflectiondata on which interpretation is based. surveysin jungle areaswheremany men are required The correctionscalculatedby the field crew are the to cut trails and bring in supplies.Consequently,the Addifirst,and oftenthe most important.corrections. organizationof the crew varies,but thqse shown in for land crews. made fig. 8.1 are representative tional (or residual)correctionsare subsequently A supervisoqor porty chia/, usuallya professional in data processing. t-19
REFLECTION FIELD METHODS
240
8.l. 3 Environmentaland safety considerations
Supcr\i\or('r Pril)'ichrcl
t_jnc
Fig. 8.1
RodnrLn
sh(rrer
Juni(r oh\cf!rl
( lhlt/gconhonc
S e i s m i cc r e w o r g a n i z a t i o n .
geophysicist,has the overall responsibilityfor a field crew.He is often assistedby an administratoror office manager, especially when many personnel are lnvolved. A party manageris usuallyresponsiblefor field operations.His main responsibilityis to obtain maximum production and adequatequality at reasonable cost.Other field personnelreport to him; he also hires field helpers.He is responsiblefor safety,equipment maintenance,maintaining adequatesupplies,paying bills, and operationof the field camp whererequired. The surveyorhas the responsibilityof locating survey points in their proper places.As the advanceman on the ground, he anticipatesdifficultiesand problems that the survey will encounterand seeksto avoid or resolvethem. This involvesinvestigatingalternattves so that the surveyobjectivesmay be achievedat minimum cost. He determinesthe best accessroutes for subsequentunits. He may be assistedby a permit man, who contacts land owners and tenants and secures permissions to conductthe survey.He is alsoassisted by rotlmenwho help with measurements.In areasof difficult access,he may also supervisebrush cutters and bulldozeroperatorswho clear the way. The observeris usuallynext after the party manager in field authority. He is responsiblefor the actual field layoutsand data acquisition,includingoperationof by a junior obthe instruments.He is usuallyassisted lay out the cable who hustlers of acrew serverand .iug and geophones. Other membersof a field crew vary dependingon the nature ofthe survey.A crew may haveone to four drillers,occasionallymore, and assistantsto help drill and haul water for the drilling operations,or two to perhaps five operators of surface source units (see for detonat$7.2.3and 7.3.1).A shooteris responsible ing explosivesat the proper time and for cleaningup the shothole area afterwards.Cooks and mechanics may be includedwhereoperationsare performedout of field camps. A marine seismiccrew usually consistsof a party manager,chief observeror instrumentengineer,three or four junior observers,two navigationengineers,a chief mechanic.and three or more mechanics'This is supplementedby the ship'screw of captain,mates,engineers,deck hands,and cook and mess/cabinattendants.
A seismiccrew is not only responsiblefor any damagesfrom its operations,but also for environmental considerationsand safety.Crewshavean obligationto minimize the environmentalimpact of their operations, which should be plannedand executedin sucha way as to minimize changesin the land (International Associationof GeophysicalContractors, 1993).This has not always been the situation; in some areas ln former times, the trails that seismiccrewscut (often "open up the coun5 m wide) were apt to be usedto try," but attitudes have changed and seismicoperations today should be as unobtrusiveas the work permits. Some of the tracks made years ago through forests,swamps,tundra, and desertsare still evident and are cited as argumentsagainstfuture work. New tracks should be of minimal width and the land should be restoredas nearly as possibleto its former condition. Crew and public safety also should be continually on the minds of all crew members.Crewsshould hold safetymeetingsperiodicallyto remind crew members of safety concerns.The safety manualspublishedby the International Association of GeophysicalContractors(l99la, l99lb) shouldbe reviewedby all crew membersperiodically.Every accidentshould be studied so that the causesmay be rectifiedin order to avoid similar accidentsin the future. Any outdoor work involvesdangersfrom falls,cuts,infections,insectbites, and poisonousplants,and any work with machinery involveshazards.Often, the greatesthazardsofall are relatedto the operationof vehicles. Public relations is another concern of field work. Courtesy calls should be made on those apt to be affectedby the field work or influential in informing the public, evenwhereone has no obligation to do so. Where field work is uncommon, an education program may be requiredto inform the public as to what seismicoperationsinvolve.
8.I .4 Condut'toJ a.fieldsurveY Most seismicfield crewstoday are operatedby contractorswho acquirethe data for client oil companies. Usually,the processbeginswith a bid requestsentout by a client. Ifexperiencein the surveyarea is lacking' prospectivecontractorsscout the area, often accompaniedby client personnel,to form opinionsabout the equipmentrequiredand problemslikely to be encountered.Thesemattersand any anticipatedconflictsare discussed.The contractor estlmatescosts, suggests and preparesa bid. The modificationof specifications, client evaluatesbids from the variouscontractorsand selectsthe bestbid. The client and winning contractor meet to resolvechangesin the specificationsthat may havedevelopedin the courseof the bidding and a contract for the work results. The contractor beginsequipment preparation and sendsan advancegroup to the field to arrange for
FIELD OPERATIONS FOR LAND SURVEYS officespaceand personnelaccommodations,commu_ nications permits, supply, storage,and repair facili_ ties,initiatespermitting operations,and reiruits local labor. A client representativemay participate in some of theseactivities.Once permitting is complete enough, survey layout is establishedand the main body of the contractor'sequipmentand personnelar_ rive. After some field experimentation,the survey proper gets underway. The data are preparedfor processingand periodi_ cally transferredto the processingcenter.The survey resultsare also regularlytransmittedto the client reo_ resentative.Unexpectedproblemswill inevitablyha;e arisenduring the surveythat will have to be resolved betweenthe party chief and the client representative. Thereprobablywill be modificationsor extensions to the program. Once the field work is concluded,the crew and equipment will be reassignedto the next prolect,and the party chiefwill prepareand presenta Iinal report to the client.
6.2 Field operations for land surveys 8.2.1 Theprogram The program of work is usuallydictatedby the clients, but the conduct of the work is the contractor'srespon_ sibility.Acquisition proceduresare often developedin meetingsbetweencompany and contractor geophysicists.A representativeof the client company 1..Ui.O_ dog") may be attachedto the field crew while the work is beingdone to monitor the work and alter the pro_ gram in the light of results.Speculative work is done in much the samemannerexceptthat the ..client"is the samecompany. Beforebeginninga survey,the questionshould be asked,"Is it probablethat the proposedwork will pro_ vide the requiredinformation?"Good practice(As_ n i c h a n d D u n l a p .1 9 5 9 )i s r o . . s h o o rt h e p r o g r a mJ n paper" before beginning the survey,estimatingwhat the data are likely to show,anticipatingproblemsthat may occur,asking what alternativesare availableand how data might be obtained that will distinsuish be_ tweenalternativeinterpretal.ions. Data migration(99.12)may requirethat linesbe locatedelsewherethan directly on top offeatures in order to measurecritical aspectsof a structure.Crestal areasmay be so extensivelyfaulted that lines across them may be nondefinitive. The structures being soughtmay be beyond seismicresolvingpower.Lines may cross features such as faults so obliquelv that their evidences are not readilyinterpretable. Lick of crosscontrol may result in featureslocatedbelow the seismicline being confusedby featuresto the side of the line. Near-surfacevariationsalong a proposedline may be so largethat the data are difficult to interpret. uhereasmoving the seismicline a short distancemay rmprovedata quality. Obstructionsalong a proposed line may increasedifficulties unnecessarilv.whereas moving the line slightly may achievethe sime obiec-
24r tives at reducedcost. Where the dip is considerable, merely running a seismicline to a wellheadmay not tie the seismicdata to the well data. Lines may not extendsufficientlybeyondfaults and other featuresto establishthe existenceof such features unambisu_ ously or to determinefault displacements. In geneial, linesshouldextendwith full coveragebeyondthe area of interestto a distanceequal to the target depth. 8.2.2 Permitting Once the seismicprogram has beendecided,it is usu_ ally desirable(or necessary)to meet with the owners and/or leasorsof the land to be traversed.permission to enter landsto carry out a surveymay involvea pay_ ment, sometimesregardedas advancepayment ..for damagesthat may be incurred." Even where surface holders do not have the right to prevent entry, it is advantageousto explain the nature of impending op_ erations.Of course,a seismiccrew is responsiblefor damagesresulting from their actions whither or nor permissionis requiredto carry out the survey. 8.2.3 Laying out the line
Once the preliminary operations have been comp_ leted, the surveycrew lays out the lines.This is often done by a transit-and-chainsurvey that determines the positionsand elevationsof both the sourcepoints and the centersof geophonegroups.The chain is of_ ten a wire equalin lengthto the geophonegroup interval. Successivegroup centersare laid out along the line using this chain, eachcenterbeing marked in a conspicuousmanner,commonly by meansof brightly colored plastic ribbon calledflagging. The transit is usedto keepthe line straight and to obtain the eleva_ tion ofeach group centerby sightingon a rod carried by the lead chainman. The survey may be tied to points that have been surveyedin with higher preci_ sion, perhapsby useof electromagnetic distancemeasurements(g7.l.l) or GPS (97.1.5),to avoidaccumu_ lating errors,and side shotsare made to relatenearby structures,streams,roads, fences,and other features to the Iine location.Radiopositioning systems(97.1.3) are sometimesusedfor horizontal control, especially in marsh and shallow-waterareas where eGvation control can be obtained from the water level. A surveyor'sfield notes should be sufficientlvcom_ pletethat anothersurveyorcan accuratelV.."onr,.rr", the surveylrom them.With elecrromagnetic surveying equipment, measurementsand survey notes may be recordedon magnetictapes or floppy disks that can be input into a personalcomputer after the day'sfield work. The computerthen reducesthe survey data, adclosureerrors,and plots updatedmaps daily. .1usts One of the surveyor'sresponsibilitiesis to plan accessroutes for the units that follow. In areas of difficult terrain or heavy vegetation,trail-building or trail-clearingcrewsmay be required.Theseare often under the direct supervisionof the surveyor.
242 8.2.4Field procedures When the energysourceis explosives,the surveyoris followed by shotholedrillers. Dependingon the number and depth of holes required and the easeof drilling, a seismiccrew may have from 1 to 10 drilling crews. Whenever conditions permit, the drills are truck-mounted. Water trucks are often required to supply the drills with water for drilling. In areas of rough terrain, the drills may be mounted on tractors or portable drilling equipment may be used. In swampy areas,the drills are often mounted on amphibious vehicles.In desertareas,air insteadof water or mud may be usedas the circulatingmedium.Where there is hard rock at the surface,percussiondrilling is occasionallyused;the drill tool is repeatedlydropped onto the rock to break it up. Usually,the drilling crew places the explosivein the holes before leaving the site. Drilling is often a major part of data-acquisition costs. When surface-energysourcesare used, there is of courseno shotholedrilling. The sources,often consisting of four to five truck-mounted units, move into position and await instructions from the recording crew Despitethe fact that no explosivesare "shot" and "shotpoint" are involved,terms such as "vibrator point" is used still sometimesused;often with Vibroseis. The recordingcrewcan be dividedinto threeunits: (l) the sourceunit responsible for positioningand activating the surface-energysources or for loading (2) the jug (when required)and firing the explosives; hustlerswho lay out the cables,place the geophones in their proper locations, and connect them to the pick up the geophonesand cables,and subsequently cables;and (3) the recordingunit that doesthe actual recordingof the signals. After the cablesand geophonesare laid out and tested,the observerchecksthat all geophonesare connected,that the amplifiersand other units of the recording systemare properly adjusted,and that everything is ready for a recording.Finally, he signalsthe sourceunits via radio or connectingwire (telephone) to activatethe sourcesor to fire the explosive. When all is ready for a shot (if explosivesare being used),the shooterarms his blaster,the deviceusedto set off the explosive,by a safety switching arrangement, and advisesthe observerthat he is ready.The "arm" button that causesa observerthen pressesan "tone" to be transmittedto the shooterand startsthe recording system.A signal sent from the recording equipment actually fires the shot. The blaster then transmits back to the recording equipment the shot instant (time-break). When a seismiccrew usessurface-energysources, the source units move into place and a signal from the recorderactivatesthe sourcesso that the energyis introduced into the ground at the proper time. The energyfrom eachsurfacesourceis usuallysmall compared to the energy from a dynamite explosion, so
REFLECTION FIELD METHODS that many recordsare made for eachsourcepointand subsequentlyvertically stacked($6.7.2)to make a single record.Severalsourceunits generallyare usedand theseusually advancea few metersbetweenthe component "subshots"that will be combinedto make one profile.It is not uncommonto usethreeor four source trucks and to combine 20 or so componentsubshots. After the data are recorded,the observerstudiesa monitor recordto seethat the recordis free of obvious defects.The monitor record is not usedfor interpretation, but may be usedto determineweatheringcorrecin $8.8.2.When finishedwith the retions,discussed cording at one source location, a roll-along sv,itch connectsthe proper elementsfor the next record and the sourcecrew moveson. Sometimesthis roll-along duty is performedby the instrumentsoftware.A computer doessomeof the checkingand recording. With the standard singlefold recording method (98.3.2)usedbeforereproduciblerecording,interpretation had to be done on the paper recordsobtained in the field, and considerableeffort was made to get would examthe bestrecordspossible.A geophysicist ine each record immediatelyafter it was acquired to decideon changesin recordingconditions.He would vary explosivesizeand depth,field layout,and instrument settingsin an effort to improve the record. Several shotsweregenerallytakenin eachborehole,drills sometimesstandingby to redrill a hole that might be lost. The high production and high efficiencyneededin order to achievelow cost per kilometer have altered field procedures.With common-midpointrecording, sourcepoints are closetogether,usually25 to 100m (75 to 300 ft) apart comparedwith 400 to 600 m for singlefold recording. The redundancy of coverage on any individualrecord,so lessensthe dependence that occasionalmissedrecordscan be tolerated.Also. the broad dynamic rangeof digital recording has removedmost of the needto tailor instrumentsettings to particularlocal conditionsand for filteringin the profield.The goal offield recording(and subsequent cessing)is generallyto haveconditionsthe samefor everyelement,so that changesin the data may be attributed to geologicchangesrather than changesin the field conditions. dictatethat the recordingoperCostconsiderations ation must not wait on other units.Shotholesmay be drilled for the entire line beforerecordingevenbegins so that the recorder never waits on the drills. Extra cablesand geophonesare laid out and checkedin advance.The roll-along switch makesit possiblefor the recording unit to be located physically at a place different from where it is locatedelectrically.The recording unit connectsto the cable at any convenient location, for example,the intersectionof the seismic line and a road. The roll-along switch is adjustedso that the proper geophonesare connected.The time betweensourceactivationsmay be only a few minutes and the recordingtruck may move only once or twice during the day.The shootingunit often walks the line
FIELD LAYOUTS becauseit needsno equipmentexceptthe blaster,and perhapsshovelsto fill in the shothole after the shot. The recordingunit does not have to traversethe line and so is subjectto lessabuse.Damagesare reduced becauseless equipment moves along the line. Thus, other benefitsaccrue besidesincreasedefficiencyof recording. Severalpoints should be noted in the foregoingdiscussion.Field operationsrequiremoving a seriesof units through the area being surveyed,and balance has to be achievedso that the units do not delayeach other, especiallyso that the recording unit is not delayed.Extra drills or layout personnelor overtimeare usuallyadded to achievethe requiredbalance.Crews often work irregular hours, working long days sometimes to make up for time lost becauseof weather.A variety of transport vehiclesare used: trucks where possible,marsh and swampbuggieswherethe ground is soft, tractors in light forests,boats,jack-up barges, air boats,helicopters,and so on. Generally,the energy sourceunits(drills,vibrators,and so on) arethe heaviestunitsand determinethe transportmethod.In some areas,operationsare completelyportable,everything, includingsmall drills being carried on men'sbacks. Transport often representsan important part of a crew'scost and determineshow much production can be achieved. Completerecordsshould be kept so that yearslater it will be possibleto determinefield conditionswithout ambiguity.Most of the routinereportingis done by computerlogging,but the field crew should specificallynote anythingunusual.The most important recordsare generallythose of the surveyorand observer,but drillersand other unitsshouldalso submit completereports.All reports should include the date and time of day and should be written as eventshappen ratherthan at the end ofthe day.The daily reports should include tape-reel numbers collated with sourcepoint numbers, specification of source and spread configurations,notes about deviations from surveyedpositions,information about all recordings, including repeats,all record settings,size of charge and depth to its top and bottom, any facts that affect the validity ofdata suchas electricalleakage,changes in surfacematerial,excessive noise,reasonsfor delays in the work. and so on.
E3 Field layouts 8.3.1Spreadtypes By spread,we mean the relativelocationsof the source and the centersof the geophonegroupsusedto record the reflectedenergy.Severalspreadtypesare shownrn fig. 8.2 and thereare many variationsof these.ln splitdip recording,the sourceis at the center of a line of regularlyspacedgeophonegroups;for example,if 120 groups are being recorded,the sourcewould be midway betweengroups 60 and 61. Howeveqthe source usuallygeneratesconsiderablenoise.and an adiacent
243 2a
r x
x
x
x
I
a I
o
x
l
I
I
x t
z x
x
t
l I
I
t l
a
21
ltlz I x x x x x x x x I I x x x I x x x x Split-dip spreo.ls l r
x
x
l -
l
c
,
.
x
x
2 x
x
x
l
t
x
l x
t
x
x
Gopped spllt I
End-onsprsod 2a x x x x x x x x I
tat2 x x x I x t
x t
t
I
x x x I
| t
I n - t i n eo t f s e t
21 tt tz x x x x x x x x x t x x x x t I x x x t
I
E r o o d s id e - T
?1 x I
x x x x t x
t3 t2 x t x x x r x
x x x x t t x
x
B r o o d sdi s - L
l"
ti"r'1,,r,.1
i
L. C r o s ss D r e o d Fig. 8.2 Types of reflection spreads.The symbols 0 and x representsourceand geophone-groupcenter locations, respectively.
geophonegroup often yields only a noisy and unuseable trace. The geophonegroups nearestthe source thus are often not used,producinga gapin the regular geophone-groupspacing.The sourcepointgap may be only a singlestation or a number of stations(resulting in a gapped split) with near-traceoffsets of 100 to 700m. Asymmetricalspreadsare common today.A common spread is the end-on,where the source is at one end of regularly spacedgeophone groups. This arrangement also often involves in-line offset of the source.Occasionally,the sourceis offset 500 to 1000 m perpendicularto the seismicline to permit the recording of appreciabledata before the arrival of exceptionallystrongground roll; suchspreadsare called broadside spreads and both broadside-T and broadside-Lspreadsare used, the former having the sourceoppositethe spreadcenterand the latter opposite one end of the spread. With cross-spreads,Iwo
244
REFLECTION FIELD METHODS
linesofgeophonesare laid out roughly at right angles so that three-dimensionaldip information may UeoU_ tained. Additional spreadarrangementsused in 3_D recordingare discussed in gl2.l.2 and 12.1.3. 8.3.2 Singlefold recording Virtually all routine seismicwork consistsof conttnu_ ousprofling, that is, the sourcesand geophonegroups are arranged so that there are no gaps in the data other than thosedue to the discretesamplingbecause of the geophone-groupinterval. prior to tte 1960s, each reflectingpoint was sampledonly once to yield singJefoldrecording.An exceptionwas that the points at the ends of a record (tie points) sometimeswere sampledagain with the adjacent record. Various ar_ rangementsof sourcesand geophonegroups are em_ ployed to achievethis. Singlefolarecordingis in con_ trast to common-midpoint recording where each reflectingpoint is sampledmore than o=nce. Continuous-coveragesplit-dip recording is illus_ trated by fig. 8.3a. Sourcesare laid out at Lsular in_ tervalsalong the line of profiling.often 400 to S+Oapart.A seismiccablethat is two sourceintervalslong is used.Provision is made to connectgroups of geol phones (for example,24 groups) at regulai intervals along the cable(called thegroup intervill. Thus, wrth sourcepoints400 m apart, 24 groups are distributed along 800 m of cablemaking the group centersabout 35 m apart. With the cablestretchedfiom point 0, to point O., sourcepointO, is used;this givessubsurface control (for flat dip) betweenA andB. The portion of cable^betweenO, and O, is then moved bitween O, Ooand sourcepointO. is used;this givessubsur_ 1nd face coveragebetweenB and C. The travel path for the last group from-sourcepointO, is the reversedpath for the first group from sourcepointO, so that the subsur_ face coverageis continuous along the line. The geo_ phone location at the sourceis often not recorded. 8.3.3 Common-midpoint method C,ommon-midpoint (C M p) or ..roll-along" recording (Mayne, 1962,1967)is illustratedin fig. il.4a. We have evenlyspacedgeophonegroups,which we shall num_ ber by their sequencealong the seismicline rather than by the trace that they representon the seismic record.Geophonegroups I to 24 are connectedto the amplifier inputs in the recording truck and sourceI is used. By assuminga horizontal reflector,this gives suhsurfacecoveragefrom a to g. Geophone groups 3 to 26 are then connectedto the amplifier infuts, the being made by meansof the roll_alongswitch :^h^"1g.: ($8.2.4)rather than by physicallymoving thJseismic cable.SourceB is then used,giving subsurfacecover_ agefrom b to i. SourceCis now uJedwith geophones 5 to 28, giving coveragefrom c to r, and ,J on dorvn the seismicline. Note that the reflectingpoint for the energyfrom sourceI into geophoneg.oup 2l is point
Fig. 8.3 Spreads to give continuous subsurface coverage.(a) . Symmetrical split spread where half of the spread is moved for_ ward lor successivesource locations. (b) End-on spread where sources are located at each end before the entire sbread is advanced; the source at O, will complete coveragefrom B to C
I, which is also the reflectingpoint for the energyfrom B into geophonegroup 19, from C into 17, from D into 15, from .t inro 13, and from Finto il. After removal of normal moveout, thesesix tracescan be combined (stacked)together in a subsequentdata_ processingoperation. ln this situation, the reflecting g9i1t/is sampledsix times and the coverageis called "6-fold" recording (sometimescalled 600%). Obvi_ ously,the multiplicity tapersoffar the endsof the line. Most present-dayrecordingusesat least l2_fold mul_ tiplicity, 24- and 4S-fold are common, and at times multiplicity exceeds500. To help keep track of the many tracesinvolved in CMP acquisition,stackingcharts are used (Morgan, 1970).A surface sracking charr (fig. g.4b) has geo_ phone location g as one coordinateand sourcelocation s as the other,that is, the trace observedat s from so-urce s is indicatedby the location (g s). A vaiiation of this chart, a subsurfacestacking chart (fig. g.4c), has the trace plorted ar [(g + s)12,sl. Occasionally,one of the regularlyspacedlocations will not^bea su-itableplace for u ,ouri. (perhapsbe_ causeof risk of damageto nearby buildingg and ir_ regularly spacedsourcepoints(or geophoie groups) -used, will be used. Thus, if point .E couid not be a sourcemight be located at E, insteadand then eeo_ phone group l4 (insteadof l3) would receivethe"en_ ergy reflected at / Figure g.4b shows the surface stackingchart when ,8, is used insteadof E Note in fig. 8.4bhow the six tracesthat havethe common mid_ point/line up along a diagonal;points along the op_ positediagonalhavea common offset,whereis poinis on a horizontalline havethe samesource.and points along a verticalline representtracesfrom a common geophonegroup. Stackingchartsare usefulin makine static and NMO corrections and ensuring that the
FIELD LAYOUTS
245 midpoint gather. The wavefield could aiso be represented by the samples at the same time for different locations,or as time s/lces(seealso $12.3).A threedimensionalrepresentationof data on a sinsle seismic -commonline, oriented in common-midpoint and offset directions, is sometimescalled ofset space. 8.3.4 Practical constraintsand specialmethods
",'i,
15
20 \
,"';i].".0""* "*,,-, " 30
,r'2,5
3.5
l0
a \"-
e\e 3 l r
, t ; -
\-
0 ' r 0
l P r t : d
%(" 9\
5
10
t\
0 xxxxxixxxxxxxxxxxxxxlxir - - Iul"ll]lh-
r
i
lridpornl=(g+s)/2 25 30 35 - - - -
I e xxxxlxxxxxxxxxxxxx!xxxx\ l \
s
. 0,,,\,,,,,r,,,",'1,,,,,,\,
;
2 e xr{xxxxxxxxxulxxxxxxxx\
10
",\,_"""i__,,,_1,,
Fig. 8.4 Common-midpoint method. The symbols 0 and x represent sources and geophone-group center locations, respectively. (a) Vertical section illusrraring CMP recording, (b) surface stacking chart, and (c) subsurfacestacking chart.
tracesare stackedproperly. Geophonessamplethe seismicwavefieldat discrete locations,just as digitizing samplesa seismictrace in time (97.6.5).This spatial sampling obeys the sampling rules (59.2.2),and inadequatespatial sampling producesaliasing(that is, createsfalsedip alignments; seefig. 6.2)just as inadequatetemporal samplingcreatesfalsefrequencies. Each x on the stackingchart in fig. 8.4b represents an observedseismictrace that extendsin time. The data can be examinedin different directions,as indicated by the dashed lines; this proves useful in the study of noises,such as near-surfaceirreeularities. ghosts.multiples, and convertedwaves.Di-splaysol' the data in different directionsare called goihri, 1o, sometimesdomains);thus, a field record is a commonsource gather, but we can also make a commongeophonegather, common-ofset gather, or common-
(a) Gaps in coverage. As stated earlier, a common goal of field work is to have everythingthe same at each point along a line, so that an interpretercan attribute a changein the data to a changein the geology rather than changingfield conditions.However,uniformity is rare in land recordingbecauseaccessis restrictedat somelocations,perhapsbecauseofnearby wells or habitations. Wherecertainsitescannot be occupiedor wherethe sourceeffort has to be decreased,extra sourcelocations may be usedto compensateat leastpartially for decreasedmultiplicity or weakersource.The effort at nearby locationsmay be increased,the seismicsource offsetto the side,the line direction changedslightly,a dog-leg(jog) introduced in the seismicline, or some other effortsmade to partially compensate.Clear notation of the field changesshould be included in the field recordsand subsequentlytransferredto the seismic sectionsto alert an interpreterto the changes.Recording condition changesoften show on stackedsections by changesin the first-break pattern (seefig. 8.5). The ends of seismiclines produce differencesin multiplicity and data quality (fie. 10.3).To maintain multiplicity closerto the end of the line, extra source locations may be used with land recordins. Where end-on shooting is being used with the actiie spread preceding the source down the line (..pushine the spread"). the source units may proceed through the activespreadregion,which is held constant,when the end of the line is reached("shooting through the spread"). (b) Effect of direction of shooting. The direction in which a surveyis carried out can affectthe data quality. Dangerfield(1992)showslines run acrossan area where gas leaking from a reservoircausesdistortion (fig. 8.6); by comparison,lines run tangential to the gas area show a remarkable improvement in data quality. O'Connel, Kohli, and Amos fl992) show differencesin the quality of vertical sectionsfrom marine 3-D data volumes(fig. 8.7),wherethe acquisition directions differ by 90". A gather from an east-west line involves raypaths having different amounts of travel in the north-south salt body. (c) Undershooting. Long in-line or perpendicular offsetsare sometimesused where one cannot record over a desired region, perhaps becauseof structures, river levees,canyons, cliffs, permit problems, and so on. This technique is called undershootins.Under-
tfi
246
REFLECTION FIELD METHODS
i
0 oo;- --
---i
vE -5*
= e
l
i:',
l-14'.;-1
S:gsa:r
. a
7r'.1
74
-a,.Etl
::-:td..,) =:::/-44
z'-!-:/3, . . . - ' , J ' - :
'
tt
=s+*:#;3 =€E': o Fig. 8.5 Section in Ardmore Basin, Oklahoma. Lack of.access results in the V-shapedgaps seenat the top ofthe section. Data quality often deterioratesin such regions.ih" lin" shows a oosr-
shooting is used in the marine environment by two boats.thattravel parallelto eachother (fig. g.g) to ob_ tain data under platforms.Undershootingis uiro ur._ ful_whereraypathsare so distortedby shallowfeatures of limited extent that sensecannot be made of deeo events,as might be the situation in mapping under_ neath a salt dome,reef,gas leakingfrom-f deip reser_ voir,_orlocal region of very irregular topography or weathering. (d ) Crookedline methods. Becausemany interpreta_ tion criteria,suchas changesin dip rate,becomemore difficult to usewhen line directionchanges,effortsare made to keep lines straight. However,sometimesac_ cessand/or structuralcomplicationsmake it impossi_ ble to locate lines in desiredlocations.The fieid re_ cording may be done in the same way as CMp surveying, except that the line is allowed to bend (Lindsey, 1991),and the departuresfrom regularity are accommodatedin subsequentprocessing.The cor_ rect source-to-geophone distances(as opposedto dis_ tancesmeasuredalong the line) must be calculatedso that the proper amounts of normal moveout can be applied and the correct midpoints actually deter_ mined. Usually, a best-fit straight line (or ieries of straight-linesegments)is drawn through the midpoint plot (fig. 8.9), rectangularbins are c;nstructed, and those traces whose midpoints fall within a bin are stackedtogether.The bins are often perpendicularto the final line, but sometimesbins are oiiented rn the strike direction. The lateral extent of a bin mav be
zxtu
tive flower structure. (From Harding, Gregory, and Stephens, l 9 8 3 .)
made smalleras the expecteddip increases. Becausethe actual midpoint locations are distrib_ uted over an area,they contain information about dip perpendicularto the line and in effectproducea serles of cross-spreads, from which the true dip can be re_ solved.Lines are sometimesrun crookedintentionally to glvecross-dipinformation.
Fig. 8.6 Raypaths for seismic lines across (A) and tangential (B) to a gas-obscuredarea.
FIELD LAYOUTS
247 8,3.6 Unifurm linear arrays (a) Responseto harmonic waves. Arrays are used to discriminate between waves arriving in the vertical and horizontal directions.They are uniform andlinear when the elementsare spacedat equal intervalsalong the seismicline, or areal whenthe elementsare distributed over an area.The responseofan array is usually ilfustrated by the array response,defined as the ratio of the amplitude of the output of the array to that of the samenumber of elementsconcentratedat one location. Figure8.10showsan arrayof n identicalgeophones spacedat intervals Ax. We assumethat a plane harmonic wave with angle of approacho arrives at the left-hand geophoneat time I and that the geophone output is I sin tot. The wave arrives at the rth geophoneat time I * rAt, whereAr: (Ax sin ct)iZ; the output of the rth geophoneis I sin o(t - rL,t1: 1 sin (ol - r1), where"yis the phasedifferencebetween geophones,that is, successive : : 2ttv(A,r sin a)l V: (2nAxl\) sin ct ooAt f : 2rL,xllt,,, where L,, : L/sin o is the apparentwavelengthin eq. ( 4 . 1 3 b )T. h e o u t p u to f t h e a r r a yo f r p h o n e si s
I
n
l
h u ) : L , 4 s i n ( o -r r 1 1 ) |:o : I [sin (jr1)Ain (lr)] sin [t,ll j(,? l)^y] Fig. 8.7 The same east west line extracted from two migrated 3-D surveys, where the acquisiton lines were oriented respectively east west (upper) and north.south (lower). Data are better on the latter survey becauseraypaths did not have to penetrate the north south salt body (shaded). (From O'Connell. Kohli. and Amos. 1993.)
8.3.5Array concepts The term array rcferseither to the pattern of a group ofgeophonesthat feeda singlechannelor to a distribution of sourcesthat are fired simultaneously. It also includesthe nearby locationsof sourcesfor which the resultsare combinedby vertical stacking.A waveapproaching the surface in the vertical direction will affect each geophoneof an array simultaneously,so that the outputs of the geophoneswill combine constructively;on the other hand, a wave traveling horizontally will affect the various geophonesat different times, so that there will be somedestructiveinterference. Similarly, the wavestraveling vertically downward from an affay of sourcesfired simultaneously will add constructivelywhen they arrive at the geophones,whereasthe wavestravelinghorizontallyaway from the sourcearray will arrive at a geophonewith different phasesand will be partially canceled.Thus, arrays provide a means of discriminating between wavesarriving from different directions.
(seeproblem l5.l2c). The array output thus lagsbehind that of the first geophone;for n odd, the lag is that ofthe centralgeophone;for r even,it is the mean of those of the two central geophones.The array responseF dependson both n and 1: F : [ a m p l i t u d eo f h ( t ) l n A l : l s i n( j n 1 ) / [ ns i n ( ] 1 ) l l : lsin [(nnAx sin ct)/tr]{nsin [(nAr sin ct)/\]]l : lsin [rn(Ax/\)sin ct]/{n sin [n(Ax/\) sin o]]l ( 8 . 1)
S E AL E V E L
REFTECTOR
FIECTOR
Fig. 8.8 Use of two boats to obtain data underneath a marine platform.
248 REFLECTION FIELD METHODS
F : t , I - - - t - . 1 .
I'r rtli
r,l -J
iT
t.-
rrii
*JI I I I
-- i I
Fig. 8.9
Portion of a
con crooked rine rheil;:il:T,ffil#'jt?T,Jj:j,,%; geophones are laid out alor
t?.u.gt!"ds.Jpsh:;"XX;if ifJ*:.ffiil:::: l:"ilr"" shownas dots.The line resultingfrom ciooked_lin" i.o""run*
r=n _l
Fig. 8.10
Wavelront approaching a linear arrav.
with eq. (7.4), which givesthe response for !com93re a continuous array). Array responseis often plotted using . as abscissa \,, V. : Vlsin a (: uppu..ni;;i;;;;*. L"::,. .q. (:)3y. : L,rtl,x: isin ol/V, dip mo.veout lee1,rent ano so on, other quantitiesremainingfixed.or using the dimensionlessabscissa,Ax/),,,(see fig. g.l la). The graph usually consistsof a series'ol.i^irnu iroU"rt separatedby small values.For_A: : \,,, F : l,'giving the first alias lobe,and beyond.ttris. ttre'enti.epattern repeats. The lobes between the principal _iin tob, = (o 0) and the alias lobe ur. .ull"d iA" toi"rr. f* uniform spacing,the position "f th; fi;J';;;; o. tir. width of the principai lobe, aepenas ."'/lr, *rri"r,
has cross-dashes.showingthe output trace spacing. The solid rectanglesshow the bins (areasof midpoints combin'eain stacklng) to make a single outpu.t trace, one rectangle for prolectrng perpendicular to the line, the other for pro.leciing along srruc_ t u r a l s ( r i k e .( C o u r t e s yo f G r a n t _ N o r o a c . l
is one qeophonespacinggreaterthan the distancebe_ tween^theend geophones,(n _ 1) L.x; n Ax is called Ihe efective array length. For nonuniform arrays, the effectivearray length is raken ". th. ;;il^A.r of a uniform array whose principal lobe h?s ,h. ,urn. width at F : 0.7. The region between tt " poini, *t ".. the responseis down bt3 dB, that is, r.fr'.i. r = O.Z,
illil:9,th.l,on(t
resion(sometimes tt",e r.iectregion
to rhe 6 dB points, that is, F : Ir.:el'xed.wrth..r.:p:.t_ y.)i occasronally. it is definedby the nulls that separate the side lobes from the main jobe and-tfre principut aliaslobe). The nulls in fig. g.I I occur when the effectivearray , length is _anintegral number of waveterryths;wave peaks and troughs are then sampled .quujly io tfrut they cancelin the sum. An exception ,o ltiir-i".u., u, the alias lobe, where the wavelength equals,h-",pu"_ ol ttrg individual geophones;"""f. g."pi"i" tt.n lng records the sameamplitude so that utt iaa'in pt ur.. Ann1.91t wavelengthor apparentvelocity is olten , tne vanableto be studiedand array diagramsare of_ ten plotted with a linear wavelengit ,"i1., as in ng 8.12ainsteadof th'ereciprocalsca"le, ". ir'ng. b.f f ", and with a logarithmicverticalscalein aeciUeis. array responsecan also be plotted in polar form, as in fie.
f I
lal
v rrr
€8
r
2
r
2
I
r
|
t
t
0
l/5
o'5 l
zls
l
j Apparcntdip(ms/m)
App"r"n, ""lo.ity 1kr7r; t r
315
415
sls
0 25 l
615
ApparentwavelenSth (m)
Angle of approach, q ( lz = 1.5 km/s) (4,
(r)
(c)
P05
u
r
2
3
L
Apparentdip (ms/n,) (c)
Fig. 8. I I Responseof arrays to a 30-Hz signal. The alternatrve scales shown in part (a) apply to all three arrays. The effective length of the array controls the width of the main lobe. and the element spacing controls the location of the secondary (alias) peak. Weighting increasesthe attenuation in the rejeci region. The dashed curves indicate the array responseto a tell-shaped
Irequency spectrum peaked at 30 Hz with a width of 30 Hz. (Courtesy ofChevron.) (a) Five inJine geophonesspaced l0 m apart; (b) five geophonesspaced l0 m apart and weighted l, 2, 3,2, 1 (or nine geophonesdistributed among the five locations according to these weights); (c) nine geophones spaced 5.5 m apart.
2s0
REFLECTION FIELD METHODS
0 5 F
0L 0
60
40
Apparentwavelenglh(m) (a)
0.2
arguesthat, with common-midpointstacking,the entire spreadconstitutesthe effectivearray length, that is, all the tracesin a common-midpointgatherare lnvolvedin attenuatingground roll, air waves,and other noises.The stack array is a uniform linear array involving the entire common-midpointgather.This can be achieved in a number of ways with geophones spreaduniformly over the entire geophonegroup interval: (a) with a split spreadhaving sourceslocated midway between group centers and source spacing equalto the geophone-groupinterval,(b) with an endon spreadhavingsourcespacingequal to half the geophone group interval, and (c) in other ways. The NMO correction,sourcepointgaps,and minor variations of ground-roll propertiesalong the line usually of the stack array sigdo not lessenthe effectiveness nificantly. 8.3.7 Weighted(tapered)aruays
-(b)Fig. 8.12 Array directivity plots for five inline geophones spaced l0 m apart for 30-Hz signal.(a) Plot that is linear in apparent wavelength; (b) polar plot for velocity of 1.5 km/s; s o l i d c u r v e i s f o r 5 0 - m s p a c i n g( w i t h n u l l s a t I | . 5 ' , 2 4 ' , 3 7 ' , a n d 53") and dashed curve for l0-m spacing (null at 90").
8.12b.In this case,the radiusvectorgivesthe valueof ,Fas a function of the anglect. The case of a continuous sourcewas discussedin \7.2.2e for a vertical source,but the situation is the samefor a horizontal sourceexceptfor a 90orotation of fig.7.14. ( b) Response to transients. Actual seismic wavetrains are almost alwaysrelativelyshort transientsinvolving a spectrum of wavelengths (frequencies) rather than a single harmonic wave as usually assumedby array theory.The effectof changingapparent wavelengthis to stretchor compressthe array diagram. A transient wavelet can be thought of as a superpositionof different apparentwavelengthcomponents(the Fourieranalysisconcept,$15.2),eachof which would produceits array responsewith its peak amplitudeequal to the amplitude of the Fourier component, and the effectivetotal responsewould be the sum of these.This describesthe convolutionoperation ($9.2.1),and the array responseto a transientis obtained simply by convolving the harmonic array responsewith the wavelet spectrum. The effectiveresponsefor a bell-shapedspectrum is shown by the dashedlinesin fig. 8.1L Effectiverejectionis generally poorer (exceptin the alias-loberegion)than the rejection for a harmonic wave. (c) The stack array, The width ofan array reject region is proportionalto the arraylength.Anstey(1986)
Arrays where different numbers of elementsare located at the successivepositions are called tapered arrays. Compared with a linear array with the same overall array length, the main lobe and principal alias "reject lobes are broadened,but the responsein the generally array length The effective smaller. region" is is lessthan the actualarraylength.Figure8.1lb shows of a 1,2,3,2, 1 array(the numbersindithe response cating the number of elementsbunchedat successive locations).Taperingcan also be accomplishedby varying the outputs of the individual geophonesor by varying the spacingof the geophones.Arrays are also sometimesweightedat the endsof the array to attenuate long-wavelengthevents. Tapered arrays also result from combinations of sourceand receiverarrays,wherethe effectivearray is the result of convolving($9.2.1)the sourcearray with the receiverarray. The Vibroseisarrangementillustratedin fig. 8.13providesan example. 8.3.8Areal arrays The principal application of linear arrays is in discriminating againstcoherentnoise traveling more or less in a vertical plane through the array. Coherent noisetravelingoutsidethis planecan be attenuatedby an areal array (Parr and Mayne, 1955;Burg, 1964). Someareal arraysare shownin fig. 8.14.The effective array in a given direction can be found by projecting the geophonepositions onto a line in that direction; thus for the diamond array of fig.8.14a,the effective array in the in-line direction is that ofa tapcredarray , hereas 1 , 2 , 3 , 2 , I w i t h e l e m e nst p a c i n gL ' x : a l " , l 2w at 45o to the line the effectivearray is 3, 3, 3 (or the sameas a three-elementuniform array) with L,x : a. Where sourcesare locatedat different azimuths,as in land 3-D surveying, the differencesin array responsewith direction affect the componentswithin a bin differently and thus introduce undesired differencesamong the bins. An array such as the windmill
FIELD LAYOUTS 33m
--l t*
Vibrator locations
t'
A A 4 Sweep A A A A A A A A A A A A A A A A A A A
2
6
A A A A A A A A A A A A . A A A A A
l+
lon
m-l
! i I
Groups usedwith sweepsl-6
I
7 8
Groupsusedwith sweeps7-12 9 l0 il 12
A A A A l3 A A A A l4 A A A A l5 A A A A l6 A A A a 1 7 A A A a l 8
Groupsusedwith sweepsl3-18
F-300m-_-i Fig. 8.13 An arrangement used with surface sources such as Vibroseis.Four units 33 m apart lollow one another from left to right down the seismic line, operating simultaneousjy at loca_ tions spaced 16.5m apart. The positionsof the vibiators fbr successivesweepsare displaced vertically to avoid overlap. Re_ cords at six successivelocations are summed (vertically stacked) to make an output field record. The four central geophone groups (each a linear group 100 m long) are not used for each output record (becauseof vibrator truck noise). The recordins
array of fig. 8.149whoseresponseis nearlythe same in all directionsis suitablefor this situation.
8.3.9 Practicalconstraintson arrays Response diagramssuchas thosein figs.8.I I and g.| 2 apply equally to arrays of geophonesand arrays of sources.They also apply to the summing of tracesin vertical stackingor other types of summing, such as is done in data processing.Theoretically,we get the sameresultsby using I sourceand l6 geophonesas by using I geophoneand 16 sourcesspacedin the same manner and activated simultaneously.However, we use multiple geophonesmuch more than multiple sourcesbecausethe cost is usually less.In difficult areas,both multiple sourcesand multiple geophones are usedat the sametime. With most surfacesources. two to four units are used.The recordsfrom several successivesource locations not very far from each other are often summedto make an anay sum (vertical stack)and a sizeableeffectivesourcearray may be achieved in this way (fig. 8.13). Array summrng achlevesgreaterattenuationofrandom noisethan us_ ing simultaneousmultiple sources. The cancelingofcoherent noiseby using geophone and sourcearrays presentsa more challengingarray designproblem than does the cancelationof random noise. In the caseof random noise, the locations of the elementsof the array are unimportant provided
connectlons are advanced one group after source locations 6 and 12. The source locations used for one output record are shown by solid triangles. (a) Successivelocations alone the line of source units and active geophone groupsi 1b) effective array from combining the source and geophone arrays (the result of convolving them); numbers indicate the number of sweeoscon_ t r i b u t i n g t o e a c h p o r t i o n , t h e I o c a t i o n b e i n g r h a t f o r s o u r c el o _ c a t i o n sl 3 t o 1 8 .
no two are so closethat the noiseis identicalfor both. For coherentnoise,the size,spacing,and orientation of the array must be selectedon the basisof the prop_ erties of the noise to be canceled (Schoenberger, 1970).If the noise is a long sinusoidalwavetrain,an array consistingof n elementsspacedalong the direc_ tion of travel of the wave at intervalsof Lln, whereL is the apparent wavelength,will provide cancelation (seeproblem 8.6b). However,actual noise often con_ sistsofseveraltypesarriving from differentdirections, each type comprising a range of wavelengths;more_ over, the nature of the noise may changefrom point to point along the line. One sometimesresortsto areal arraysin areasof severenoiseproblems(althoughthe in-line distribution of elementsis almost always the most important aspect).Numerousarticleshavebeen wntten on the subjectof arrays;McKay (1954)shows examplesof the improvement in record quality for different arrays. In addition to the difficultiesin defining the noise wavelengthsto be attenuated, actual field layouts rarely correspond with their theoretical desien (see fig. 8.15 and Newman and Mahoney, 1973).tri.uru.ing the locations of the individual geophonesis not practicable.In heavy brush, one may have to detour when laying out successive geophones,and often one cannot seeone geophonefrom another so that even the orientation of lines of geophonescan be very irregular. In rough topography, maintaining an array design might require that geophonesbe at different
252
REFLECTION FIELD METHODS al't2
(a)
l.*l
' l ' )
7
)
I
A. A-A- A-A'-
(c)
o/12 l l
O)
' )
' 1
' - - a - a ' a ' | a-1 'a--
-
--a'
L'a---
t \
v
4 n
n
, / o o
o
o
"
I
o
o
o
o
o
ol o2 o3 o2 ol^
+
-
o
a
1
dl
;." o
A3
o
A3 AI AI
't
\alJ2
a(l -ltJ2)
(d)
-l l*
- - al ;tr1a2at2ar- H o
(c) "P
al,t2
\
o
a,t n
o
o
f
)
\
o
o
. o_,lA^
v
o
o
-
***.
l**l
oF;l o
o
(
Y
Y
G)
/
I
a
^ t
v
o
o o O
o o o o
O o
O
\
o
,
o o Fig.8.14 Typesofareal arrays.Elementlocations areind! catedby smallcircles,theeffective arraysin differentdirections areindicatedby smalltriangleswith theireffective (a) weights.
(b) X-array;(c) rectangular 3 X 3 diamond; array;(d) crow's foot array;(e)odd-armstar;(f) herring-bone array;(g) windmill array.
elevations; this may produce far worse effects than those that the array is intended to eliminate. Similar problems arise where the conditions for planting the geophonesvary within a group (Lamer, 1970),perhapsas a result of loosesand,mucky soil, or scattered rock outcrops. The best rules for array design are often (l) to determine the maximum size that can be permitted without discriminating against eventswith the maximum anticipateddip and (2) to distribute as many geophonesas field economywill permit more or lessuniformly over an area a little lessthan the maximum sizepermitted,maintaining all geophoneplants and elevationsas nearly constant as possibleeven if this requiresseveredistortion of the layout (seealso $8.4.2).
Arrays may also be of value in refraction work (Laster and Linville, 1968). 8.3. l 0 Spatial samplingrequirements A successfulseismicsurvey should be designedwith the objectivesin mind and with some knowledgeof the geology.The subsurfacesamplinginterval should be small enough to avoid aliasing during processing and interpretation. The sampling theorem (59.2.2) statesthat signalsshould be sampledat leasttwice per wavelength.The highestfrequencyofinterest u-,., the velocity,and the maximum dip (hence,the maximum angle of approach) fix the shortest apparent wavelength and thus determinethe maximum permissible
SELECTIONOF FIELD PARAMETERS sub^surface spacing. The limiting value of the sub_ surfacespacing,D_.,, is, therefor!, D-* S (Ir")^J2 = tr_r(2 sin c_.") = (Vlv^ )l(2 sin o-u*) = (Vlv^^,)l[2V(At/Lx)^^*] < 10001[2v^^*(ArlAx)*"_], g.2a) eqs. (4.13b), (2.4), and (4.t3a)), 1.f,r:i ,t*":rsively wnereAmin rs the minimum wavelength,(L-)_,is the minimum apparentwavelengrh irieq. 1as ,-". t+.ii6), the maximum frequency,o** the maximum angte of approach,.lino_". : V(Atl[i)^_*, with the maximum apparent dip moveout, (L,tlAx,j*., given in _ittir."_ onds per unit distance.tt is prucieni io attow u-*urgin of safety becauseit is difficult to O.t.rrnin. ,-._ unO (Lt/Lx)*^^ exactly,and hence we often,p""ifil'tirr"" samples per shortest wavelength (S.ol;n, 'rsst), that is, D < 1000/[3u_.*(A/Ax)_.*].
(8.2b) r"mpli ng intervals computed according to ,t *r::?.,.. rne precedrngdesign^considerations generallyraige trom 10 to 100 m. Geological consiraint, 1fo. "*_ ample, the preknowledgethit there are no iarge Oips; can permit relaxing the spatial aliasing constraint. However,most data are migrated una _i!.ution algo_ rithms create noise where spatial ,urnpiinr'i, mua"_ quate;this may providethe limiting.onrt.uini. Intelli_ gent interpolation (g9.11.2)can bi used tolelax the spatial aliasingconstraint as far as rnig.ution is con_ cerned.
8.3.I I Extendedresolution Although conventionalgeophones and recordingsys_ j..: 1g usualtyadequatefor recordingup t; 125Hz '1*t (and higher) and normal alias filteis i"t "ut sharply above l/4A, where A is the sampling *t") p"._ mit recordins up to 2.50Hz fo. t; ;;;piing, tr,. bandwidth of most reflectionru.u.y, i, oiir?or, ,0 to 60 Hz. Becauseboth vertical una loriroritJ .esolu_ tions (96.4)are limited by the high_fr;;;;;;"r_p"_ must expand the passband upward ro ::,ilt, Y: acnteve hrgher resolution. Techniquesfor doing this are sometimescalled extendedresolution. limitations are usually due to (,,,1!_"-,llg.n-Uequency r, umttatlonsrn the source,(2) processes within the earth that discriminateagainst high fr"qu"ncies, (:t conditions at or near the surfaci, ln"tuaing o.ruy effects,and occasionally(4) recorAine inri.urn?n,r. Surface sourcesare often limited"with ..ro"", ,o high frequenciesbecauseof mechanicaf unj "Jupring as well as high near-surfaceutt.*uion lllbl.Tr fin comparison with a source in a borehole) resutting y: passesthrougtr the weathere0'
(e.eo)
the relativeem\ being a weightingfactor expressing the equatron of part latter the ;h^;r",; f. iiu.n-,o tt2 t4t' Equation le76: Claerbout' ii;;;;;l;'"see
Mi+.i,
oJ : matrix of time shifts' /'r t"' e : matrix of error terms' solutionis The least-squares lWrW :{ = (7f Z()
Q92; 15'57)
'AUTOMATIC STATICSDETERMINATION Surface-consistent staticssometimesconsiderablvim_ provesmarine as well as land data. Modifications have to be made becausethe characteristicsofhfdrophone groups arc apt to be consistentwith respect to their locationsin the streamerrather than locations along the line. 9.6.3 Maximizing thepower of the stacked trace Another approach assumesthat the optimum static correctionsare those that maximize the power of the stacked trace. A time_shift relation simitar to eq. (9.87)providesthe srarting point, with the i, 5,, Li, and Mr quantities being regarded as independent variables,x,. Appropnate tracesare stacked and the squareof the amplitude(proportional to the powerp) determined.The amount by which tt e po*e.itranges for changesin each variable,that is, (anixStx,, is determinedfor each variable,and Ax. is sellcted so that P increases.This is the method oi rrripir, orrrn, and similar methodsare usedin many data_processing methods.In practice,two problemsare encountered: ( I ) how to find the correct maximum if there are sev_ eral^maxima,and(2) how to get to the maximum with the fewestcalculations To solvethe first problem,one assumesthat the first esttmateis on the slopeof the correct maximum (seis_ mic data are semiperiodicand adjacentmaxima usu_ ally. representcycle jumps). Sometimes a search is made for other maxima so that one can determine. which is the largest.Another techniqueis to make a first solution after filtering out higher fr.lu.n"i., ,o that the maxima are broaderand flwer; tire nrst sofu_ tion is then usedas the starting point for solving the problem with the unfiltereddata. The idealsolutionto the secondproblemis to climb toward the maximum in relativelyfew steps without overshootingthe top by very much. The step size is often.relaredb rtpldx,.Anotirer techniqueisi'o catcu_ late thc curvature(or secondderivative) to estlmate how far awayis the maximum.To minimize.ut.uto_ tions, problems are ofren subdivided, li;iti;g the number of variablesbeing conside."dai one G.. Figures9.22 to 9.24 illustratethe improvement in data quality that can result from appticaiion ot automatic statics. Marked improvemint is otten achieved. 9.6.4 Refraction stat ic.\ Although surface-consistent staticscorrections.which are based on differencesamong traces within the spread length, generallyaccommodatetrace_to_trace variations,they may accumulatesmall errors and do a.poor job at handling long-wavelengthstaticsvaria_ trons (variations of the order of the spread length or larger). Refraction statics correctioni, which are basedon first-break refraction arrival times, provide a meansof dealing with such long_wavelength varia_ tions.
305
I
l
,1
r
fl u
0.5
r
I II
I
I
I
Source Stailca (Fh3t pass)
Ito
I
ms
II
Recelver Steilcs(Ftrstp.ss)
I II
SourcoStailcs(Socond pass)
RocolvorStatlca (Socond Pass)
I
(c) Fig.9.22 Quality improvement resulting from surface_ c o n s r s t e nst t a t i c s .( F r o m y i l m a z , l 9 g 7 : 2 2 2 , 2 2 4 . )( a ) S t a c k w i t h only field staticsapplied; (b) stack after two residual statrss Das_ ses;and (c) diagnosticsafter the first and second oasses.
The refraction first-breaks are picked automati_ cally, usually after an approximaterefractor velocity has been usedto produce reducedrefraction profiles. With CMP data, there is usually appreciablJredun_ dancy, and a logic is used to throw out those rraces that do not appearto involvetravel along the baseof
I
II
I
I l l
l
l
306
DATA PROCESSING
Fig. 9.23 Improvement resulting from applying both refraction and surface-consistentstatics. (From Yilmaz, 1987:229 33.) (a) Stack with only field statics applied; (b) stack after
surface-consistentstatics; (c) stack after refraction statics; and (d) stack after both refraction and surface-consistentstatics.
the LVL. Then the remaining data are averagedfor each location and analyzedby refraction calculation methods,which may be as simple as those discussed in $8.8.2or more elaborate,suchas the plus-or-mrnus method or generalizedreciprocalmethods discussed i n $ l 1 . 5 . 2a n d I 1 . 3 . 3 .
assumedand the calculationrepeated,and so on, until the coherencehas been determinedas a function of both stacking velocity and arrival time. (Sometimes normal moveout is the variable rather than stackine velocity.) Velocity analysis is usually done on commonmidpoint gatherswherethe assumptionof hyperbolic alignmentis often reasonable.Where dips are large,a common reflectingpoint is not achievedand DMO ($9.10.2)or equivalentprocessingmay be required. A velocity-analysisdisplay is shown in fig. 9.25. This is a good analysisbecausethe data involved in frg.9.25aare good. Peakson the peak amplitudetrace (fig. 9.25b)correspondto events.The locationsof the highs yield the velocities(or normal moveouts)that have to be assumedto optimize the stack (hencethe name stackingvelocity),but thesemay not all be primary reflections.Velocity analysesare alsocommonly displayedas contour plots (fig. 9.26) ratherthan as in fis.9.25. Other eventsas well as primariesgive rise to peaks, and hencethe resultshaveto be interpretedto determine the best valuesto be usedto stack the data (see $9.7.3).ln many areaswhere the velocity increases
9.7 Velocity analysis (velocity spectrum) 9.7.I Conventionalvelocity analysis The variation of normal moveout with velocity and arrival time has alreadybeendiscussedin connection with eq. (4.7). Severaltechniquesutilize the variation of normal moveout with record time to find velocity (Garotta and Michon, 1967;Cook and Taner, 1969; Schneider and Backus, 1968; Taner and Koehler, 1969).Most assumea stackingvelocity (4) as discussedin $5.4.4aand apply the normal moveoutsappropriate for the offsetsof the tracesbeing examined as a function of arrival time, and then measurethe coherence(degreeof match) among the tracesavailable to be stacked.Severalmeasuresofcoherencecan be used; some of thesewere discussedin $9.3.5(see eqs.(9.56)to (9.59)).Another stackingvelocityis then
vELOCITY ANALYSIS (VELOCITY SPECTRUM)
307
E
F
(
(km/s)
I/. (km/s)
r";ffi -e;7:8= i;
;"t'$ffi
i2 F
l
0 tr F"
i 2.O
@)
Fig.9.24 Improvement resulting from use of surfaceconsistent statics.(Courtesy of Grant Geophysical.) (a) Section using only the field-determined statics; (b) section using also
statics determined by a surface-consistentprogram; (c) velocity analysis using field statics; and (d) velocity analysis after application of surface-consistentstatics.
more or lessmonotonically with depth, the peaks associatedwith the highestreasonablestackingvelocities are assumedto representprimary reflectionsand peaks associatedwith lower velocitiesare attributed
to multiples of various sorts.In other areas,the relationshipsare not as obvious,and even where the velocity relationshipsare generallyregulaq difficulties may be encountered.
Srackingvelocity(ftls) I
=r €t i t at €l i
t
= l 3l
I
lli ill
i3
flii;:;:
a::::::
l':T".:': iirrirt'r:
_ _ . - - - -
(a)
(b)
Fig: Velocity analysis.(Courresy of petty_Ray Geophysi_ ? ?S^ cal.) (a) Common-midpoint gather showing tfre aata involved in the analysis,(b) amplitude of the stacked i.u". u, a function of stacking velocity at 100-msintervals, and (c) maximurnampli_
(c) tude achievableon stacked traces. The low velocities below 2.7 s are probably multiples and there are few primary reflections below 3.3 s.
VELOCITY ANALYSIS (VELOCITY SPECTRUM)
km
vELocrw.r\,vlrEc
309
on a different stacking velocity. The central two panels, figs. 9.27e and 9.27f, utllize an approximate velocity function; the panelsto the left use velocitiessuccessivelylower by somevelocity incrementand those to the right utilize higher velocities.Such a set of velocity panelsshowswhether increasingor decreasing the velocity will enhanceindividual events.Because stackingvelocity is not necessarilysingle-valued(see fig. 9.28),different eventsmight require different velocities to be optimized.A velocity panel is often run as a check on the interpretation of velocity analyses of the type shown in figs.9.25 and9.26.Velocity panelsare often made of sections(or portions of sections) stackedwith differentvelocitiesas well as of commonmidpoint gathers. 9.7.3 Picking velocity analyses
Fig.9.26 Velocity analysisdisplayed as contours of a measure o f c o h e r e n c e( s e m b l a n c ei n t h i s c a s e ) .( F r o m Y i l m a z , 1 9 8 7 :1 6 8 . )
A compromisehas to be made betweenusing the small amount of data appropriateto a specificspot, in which casethe velocity analysisis apt to be nonde. finitive, and using more data but distributed over a larger area, in which case velocity may be defined better but the velocity measurementsare then averagesover a sizeableregion. The compromiseis often to usedata for three to five adjacentmidpoints.Measurementsare also usuallybasedon all the data within a windoq which is often 50 to 100ms long, in order to increasethe amount of data and henceimprovethe velocitydefinition. 9.7.2 Velocitypanels Velocity panels (fig. 9.27) provide another display tiom which stackingvelocitycan be determined.A set of data is plotted severaltimes,each plot being based
Velocity analysisinvolvesa considerablenumber of calculationsand henceis fairly expensiveto execute; therefore,too few analysesare often run, sometimes only every t/z to 5 km along the line. Where only a limited number of velocity analysesare to be run, their locations should be selectedjudiciously, based on the best availablegeologic information, so that analysesare not wasted in noisy areas and so that changesin geology are adequatelysampled.Where the number of tracesin a CMP gather is large, only every other trace may be usedin order to reducethe cost. Velocity analysesare ordinarily picked by an interpreter. Picking involves selecting the time-velocity values to be used in subsequentprocessing.The velocity-analysisinterpreter often has in mind only achievinga good stack, and stackingcan often tolerate appreciablevelocity errors.Velocity interpretation is time-consumingand henceexpensiveand has significant potential for error, especiallywhen the picker knows little about the local geology and hencedoes not factor this into the interpretation.It is not uncommon for analysesto be picked as stand-aloneoperations and consequentlysuccessiveanalysesmay not evenbe pickedconsistently. Theseerrorsare becoming less frequent today where velocity interpretation is done at a workstationwhereadjacentanalysesalready interpretedcan be displayedalongsidethe new analysisas a guide for picking consistently.A plot (fig. 9.29) of the interval velocities(calculatedby the Dix equation, eq. (5.25)) that a particular interpretation implies is often helpful in interpretingvelocity analyses. The interpreter is ordinarily guided by a set of simplerules(Cochran,1973:1048-9): l. an increasein stacking velocity I{ with increasingdepth is more probablethan a decrease; 2. successivereflections are ordinarily separated by more than 100ms in two-way time; 3. an interval velocity greater than 6700 m/s (22,000ft/s) or lessthan 1430m/s (4700ftls) is unlikelvl
310
DATA PROCESSING +tOO t*FIl5tC *Tit;*
iiixl .r
ti|f u'til r lrtr t.*
(a)
(b)
(c)
(d)
(e)
Fi9.9.21 Velocity panel of a CMP gather. Panels (e) and (f) employ the velocity resulting from a velocity analysis with a mute applied in panel (f). Panels (a) to (d) show results where the stacking velocity is decreased lrom that in (e) by n AV,,
Fig. 9.28 Multivalued stacking velocity values. Reflections B and C arriving at the same time may have different stacking velocities.
4. the differencein interval velocity for successive layers should exceed 2oh (see problem 5.13 for a quick approximatemethod of determining interval velocity); 5. any event at about twice the lo of a previous event and with approximatelythe same ( is probably a multiple and should not be used. Computer picking basedon similar rulesis sometimes used.For example,a possiblepick must satisfyrule 2
(f)
(s)
(h\
(r)
. fh
l:, };
U)
4,3,2,andl, andAV"is sometimes as where n is respectively (g)to (i) showresultswherethestacking muchas200ft/s.Panels isincreased byn AV".(Courtesy of GrantGeophysical.) velocity
and then must passrules 3,4, and 5; if more than one pick passesthesetests,they are testedagainstrule l; if more than one pick is still possible,that with a velocity nearestthe V, of the precedingpick is selected. Multiples are apt to have velocitiesthat are low and diffractions and sideswipe events (for example, diffractions from faults nearly parallel to the hne or reflectionsfor which the line makesa small anglewith the strike direction) are apt to havevelocitiesthat are unreasonablyhigh. Becausethe amount of normal moveout applied varies with arrival time, frequenciesare lowered as offsets increase (fig. 9.30); this is called normalmoveoutstretchand it affectsvelocity-analysispicks. Long-offsettracesare muted ($9.10.3)to avoid excessive stretch effects;clearly the amount of mute applied affects the measured velocities. In the usual case, where velocity varies with depth, the alignment of eventsis actually some other curve rather than a hyperbola.However,the errorsin assuminga hyperbolic alignmentare usually small. The accuracy and resolution of stacking velocity valuesclearly depend on acquisition factors such as the spreadlength,the multiplicity (fold), the recorded bandwidth, the signal-to-noiseratio, and the lack of
VELOCITY ANALYSIS (VELOCITY SPECTRUM)
Q 4oo0
! rcoo 9 zooo rooo o.5
l.o
r'5 2.O 2.5 3.0 3.5 4.O 4.5 5.O T w o - w o lyr m e( s )
Fig. 9.29 Interval-velocity bar graph produced from a veloc: 1 1a n a l y s i s .
311
tervening locations. Values for times between picks are often interpolated linearly, and then the valuesfor traces betweenanalysesare interpolated from these,a process called bilinear interpolation,' this procedure may introduce errors where analysesare inadequately spaced,of poor quality, or picked in a nonsystematic manner.A plot showinginterpolatedvalues(fig. 9.32) providesvaluablecontrol by making the consequences of velocity assumptionsclear. Velocity analysesshould be plotted at the samevertical scaleas the seismicsection so that they can be overlaid on the section to make it easierto identify stacking-velocitypicks with specificevents.The same analyses. eventsshould be picked on successive Analyses should be continuously compared to neighboring analysesto check that variations make geologicsense;comparinganalysesalong a line allows an interpreterto assessthe uncertainty in individual picks and smooth out noise effects.Where data are good, systematicchangesmay indicate stratigraphic changes.Generally,as many eventsshould be picked as possible.While pickingjust a few eventsmay suffice for stackingpurposes,picking many eventsoften disclosesimportant interpretationclues. Whereasvelocity analysesare generallyinterpreted as if reflectorswere horizontal and the seismicline were perpendicular to strike, stacking velocity dependson both quantities.Levin (1971)showedthe dependenceof stacking-velocitymeasurements on dip { and trace E (the anglebetweenthe strikeand the line) for constant-velocityoverburden:
la : V(l - sin2(cos'E)"'
Frg. 9.30 Normal-moveout stretching. (From Yilmaz, 1987: .61.) (a) A signal with a period ?! which after applying NMO : t h a sp e r i o d Z ' > I
near- or far-offsettraces or irregular spacingin the neld. They also depend on processingparameters suchas muting and the weighting of input traces,lo,'ationand length of the time gate,samplingintervals, ,rnd the coherencymeasureused. Gathers are often decimatedfor velocity analysis,perhapsreducing the number of input tracesby l14 andlor subsamplingin rime, to reduceanalysiscosts;in addition, coherence is usually checkedonly for stacking velocitieswithin a window centeredon the expectedvelocities.Figure 9.3 I showsthe effectsof analyzingcombinedadjacent _rathers,subsampling,and insufficient offsets, and \-ilmaz (1987: 173-82)discusses the effectsof other . actorson velocity determinations. '.t 7.4 Usesand limitations of velocity analyses The precisionofreading valuesfrom hard-copyveloc:tl analysesis usually + 10 ms in /oand +50 m/s in (, rut the accuracyis often lessthan this. Velocityvalues rave to be interoolatedfor intermediatetimes and in-
(e.e3)
This relationshipis shown in fig. 9.33. Although the objective of velocity analysesis to achievegood stackeddata, the velocity values also haveinterpretationalimportance($10.5).With seismic data that are not unduly distorted by structuralcomplexities,approximateinterval velocitiescan be obtained from stackingvelocitiesby simplerelationships (seeeq. (5.23)and problem 5.13);however,intervalvelocity valuesdeterminedin this way should be routinely checkedfor reasonableness. 9.7.5 Horizon velocity analysis The determinationof stackingvelocitiescontinuously along a seismicline is calledhorizontalvelocityanalysis. Such analysesare often made for only a singleor a few reflections.Generally,horizonsare pickedby either an autopicker or manually, and analysesare made over a narrow time window about the reflections. The analysisis essentiallythe sameas for a conventional velocity analysis.Coherency is measured within the window as the assumedvelocity is varied and the selectedvelocity is that which maximizesthe coherency.Figure 9.34showshorizontalvelocityanalysesalong five horizons,and fig. 9.35 showsthe improvementin data quality for a reflectionbelowmajor lateral velocity changes,causedby salt diapirism in
t
I
looo 2000 o.o FZ
tooo 2000 3000
o.orr
4000 5000
Scaled Scalod ssnuancoamplitude
tooo
o.o
4000 5000
2000 3000 4000 5000
Scalod
Scal€d
Scalsd amplitude
2.O
Fig. 9.31 Effects of velocity-analysisparameters.(From Hatton et al., 1986:68-9.) (a) Analysis basedon two adjacent CMP'
(b) based on eight adjacent CMP, (c) analysis using only every third trace, and (d) analysisusing only near offsets.
: R . E S E R V A T I O NO F A M P L I T U D E I N F O R M A T I O N
f
v r.?
v v f.L. ? r
f
J I J
T
7000 ft/s
..\
' -
12000 ft/s
Fig. 9.32 Stacking velocity along a seismicline. Values are rnterpolated by the computer from input picks indicated by the
3.0
70'
/ /
2.0 .n
1.0
z
./
2
60' 40'o
6
20" 10' 0'
9 0 6 0 3 0 0 (Strike) (Dip) Angfe bctwecn llnc and dlp Fig. 9.33 Increasein stacking velocity with dip { and the angle b e t w e e nt h e s t r i k e E a n d t h e l i n e d i r e c t i o n .( F r o m L e v i n , 1 9 7 1 . )
this instance.Changesin the velocity in the interval betweenhorizontal velocity analyseson adjacentparallel horizonsare sometimesusedas an interpretation tool to sensestratigraphicchanges. 9.6 Presenation of amplitude information The amplitude of a reflectiondependson the acoustic impedancecontrast at the reflectinginterface.Howeveqother factors,suchas thoselisted in fig. 6.44,often obscure the acoustic-impedance-contrast information. The effects of spherical divergence and
dashes.This line is also shown in fig. 10.33.(Courtesyof Grant Geophysical.)
raypathcurvaturecan be calculatedand correctedfor. The gain of the recording instruments normally is known. Array directivity rarely has a significanteffect on the amplitude of nondipping events and so its effectsare generallyignored. Corrections for offsetdependentamplitude effectsare also usually ignored. Migration can correct for reflectorcurvatureeffects. Remainingeffectsare mostly of two kinds: ( I ) those associatedwith energylossesbecauseof absorption. scattering, transmissivity losses, and peg-leg multiples,and (2) thosethat vary with sourcestrengthand sourcecoupling, geophonesensitivityand geophone coupling, and offset. The effectsin the first group are difficult to determinebut they usuallydo not vary appreciablyalong a line and so may not obscurelateral variations.The high multiplicity of CMP data permits determiningthe secondgroup of effectsin a surfaceconsistentamplitude-correctionprogram(actually,so that the effectsare additiverather than multiplicative, the log of the amplitude rather than the amplitude) similar to automatic statics correction ($9.6.2;see Tanerand Koehler,1981). absorption A correction for frequency-dependent and peg-legmultiples (a Q-correction)is sometimes made: A(t) : l(Q)s"*ro,
(e.e4)
where l(0) refers to some referencetime. BecauseQ is usuallyknown only approximately,it is often taken as 0.01V where Z is the velocity in ftls. One processingroutine adjustsamplitudein several steps.After first correctingfor amplitudeadjustments made in recording, a time-dependent sphericaldivergencecorrection based on assumedvelocity is
280 320 360 400 440 480
-@ 2
-@ -@
lbbrrr€tAdyra.
a
t
r
r
o
tI
t
l -
,I
Fig. 9.34
A stacked section with horizon-velocity analysesoffive horizons. (From Yilmaz, 1987: 184.)
A P P A R E N T - V E L O C I T Y( 2 - D ) F I L T E R I N G
315 9.9 Apparent-velocity (2-D) filtering Apparent-velocity filtering, also called dip,fan, moveout, or pie-slicefiltering (Fail and Grau, 1963;Treitel, Shanks,and Frasier, 1967) for reasonsthat will become obvious, dependsupon the apparent velocity (definedby eq. (4.13a))of a wave as it approachesa recording spread.Equations (2.4) and (4.13) can be combinedto eive V : oolx": 2nvk, (e.es)
Fig. 9.35 Portion of a section across a salt dome orior to migration. (From Yilmaz, 1987: 185..y1a.yConventionally processed,(b) horizon-velocity analysis(HVA) along a base salt reflecIor A (center), and (c) processed utilizing HVA velocities.
applied.Such a correctionmakesthe range of amplitude values smaller and therefore easier to handle. These corrections constitute the "preliminary gain recovery/adjustment" shownin the "editing" phaseof fig. 9.62. Surface-consistent amplitude analysisand/ or correction is then done during one or more of the processingpassesin the "main processing" phase. After velocity has been determined, the spherical divergencecorrection is changedto depend on Vlt, which allows approximately for raypath curvature, using somearbitrary time as a referencevalue.An additional arbitrary exponential gain can be applied to make the range of amplitude values smaller for display purposes.This correctionmay be basedon mean absolute or rms amplitude averagesover time windows a few hundred millisecondsin length and also averagedover many traces.Sometimesthe previous step-by-stepamplitude adjustmentis simply replaced by an arbitrarygain function. Amplitudes are sometimesadjusted so that their rms averagesover a time window (perhaps200 ms rn fength)are equal,this step being called equalization. It should be noted that, becausereflection amplitude varies with incidenceangle (or with offset; see $3.4), CMP stacking does not result in normalincidenceamplitudeseven if the amplitudesof all of the component traces should be correctly preserved (seealso59.10.5).
For a fixed apparentvelocity \,theplot of frequency v versusapparent wavenumberrc, is a straight line. For a seismicspreadalong the x-axis, r, is positiveor negativeaccordingas \is in the positiveor negative directions.For a verticallytravelingsignal,r, : 0 and 4: * and the v-Karepresentationis along the u-axis. For most reflectionsignals,4) V^,",someminimum apparentvelocity,and hencethe reflectionslie within a relatively narrow wedge containing the u-axis, as shown in fig. 9.36a. Coherent noise generallyhas a lower \than reflections(fig. 9.37) and thereforeseparatesfrom them in the v-r, plot, usually calledanf-k plot (frequencyvs. wavenumberplot). We can usetwo-dimensionaltransforms($9.1.4and 15.2.4)to definean apparent-velocityfilter, F ( u , .x , , ): l . l x , ,< l 2rvlV-.1 (9'96) : o, k"")> 2rvtv-. ] that will passthe signalbut rejectthe noise(as shown in fig. 9.36c).Sucha filter that passesa narrow wedge in the u-r, domain is a "pie-slice" filter. Of course, neither signal, noise, nor filter need be symmetric about the y-axis. For example,there are hardly any coherentalignmentsdipping to the left in fig. 8.16a, and so fig. 8.16b if extendedto the left of the u-axis would be essentiallyblank. Apparent-velocityfilters can also be designedto removea noise wedgerather than passa signalwedge;sucha filter is calleda "butterfly" filter. Just as frequenciesabove the Nyquist frequency may alias back into the passbandunlessexcludedby alias filters before the sampling, so spatial sampling involveswrap-aroundaliasing (fig. 9.36b) of data for wavenumbervaluesexceedingthe Nyquist wavenumber (seeeq. (9.33)).The only way to prevent aliasing is to filter beforesampling,which is not possiblewith respectto spatial sampling, or to move the Nyquist points farther out by samplingmore closely. The filter in the space-timedomain (x, t) equivalent to the filter given by eq. (9.96) is obtained by taking the two-dimensionalinverse Fourier transform (see e q .( l 5 . l l 7 ) ) |
.rv
ftx, t) : {112fl | J
l-'ru
| *"
J
''-"' dx, dv F(v. rc,)gr'.,'
,"
or f
f(x, t):
lll2il
|
**!
f
|
*uil
cos (rc,x* 2rvt) drc"dv,
J * r J , n
(e.e7)
DATA PROCESSING
316
because/(x, /) must be real. The convolution of/(x, l) with the input (signal + noise),C@,t), givesthe output h(x, t), h ( x ,t ) : c\x' t) * f(x, t)
j:t
g(o, t) f(x - o, t - r) do dr. (9.98,15.164)
Thisequationcanalsobewrittenin digitalform:
(e.9e)
0
-t(
KN
Wavenumbel
where the space-sampleinterval is usually the trace spacingin the x-direction and the time-sampleinterval in the f-direction. Instead of transforming the 2-D filter to the time domain and calculatingCe, t) * /(x,l) as we did in eq' (9.41),we can transform g(x, t) to the (u, r,) domain, multiply G(v, x") by F(u, r,,) and use the twoto obdimensionalconvolutiontheorem(eq.(15.165)) tain h(x, t\. The use of 2-D filtering to attenuatenoise trains suchas severeground roll on common-sourcegathers is illustrated in fig. 9.38. Using 2-D filtering reduces the amount of muting requiredso that more reflection data can be usedin velocity analysisand in stacking, providing better stacking-velocitydefinition and better attenuationof multiplesin stacking. Figure 9.39showsthat 2-D filtering can be effective in attenuatingsurfacemultipleswherethereis a steady increaseof velocity with depth. 2-D filtering may also be appliedafter stacking(fig. 9.40).
(b)
tr;"T----l
I Passedby anay
l'- ^ A=;.*
I
N
I
ta
)
t
r
---l
I
9.10 Stacking 9.10.1Gathers Common-midpoint stacking is the most important applicationin improving data quality' data-processing The principles involved have already been discussed along with the field proceduresused to acquire the data. The componentdata are sometimesdisplayedas gathers.A common-midpointgather (seefigs. 9.25 to 9.27) has the tracesfor the samemidpoint arranged side by side, and a common-offsetgather has the distance is traces for which the source-to-geophone displayed are Gathers by side. side the samearranged eitherbeforeor after normal-moveoutcorrection.The traceswithin a common-midpointgatherare summed to yield a singlestackedtrace.
Wrycnumbcr(tat rl
9.10.2D M O (dip-moveout ) correction
.a
(m) Wavelength
(c) Fig. 9.36 A seismic gather in the frequency wavenumber domain. (After Sheriff, 1991.)(a) Signal, generally near the u-axis' and noise tend to separate;(b) illustrating wrap-around aliasing where x, is the Nyquist wavenumber;and (c) filtering effectsof frequency, array, and velocity filters.
The result of stacking CMP traces after normalmoveout correction is assumedto be the trace that would be recordedby a coincident source and geophone located at the midpoint' However,the reflecand in fig. 4'9b' tion point is displacedupdip ($4.1.4), the reflectingpoint is R, not P,' this resultsin an offset changeAx given by eq. (4.22a)and a decreasein the
STACKING
317
ll
i i
Fig. 9.37 Three common-source gathers (above) and their / k spectra (below). A, B, and C are high-amplitude, dispersive,coherent noise trains: D is the wrap-around of C and Econsists of
reflection events.As the spatial extent of the noise train becomes wider, its.l:k equivalent becomes narrower; compare F and G. ( F r o m Y i l m a z . 1 9 8 7 :7 0 . )
zero-offsettraveltime Al given by eq. (4.22b). Both effectsare proportional to the squareof the offset,so stackingproducessmearingunlessproper DMO corrections are applied. Also, the velocitiesdetermined in velocity analysesare dip-dependentunlessa DMO correction has been applied. Dip also causespeg-leg multiples to divide into two sets,one with apparent stackingvelocityhigher than the zero-dipstackingvelocity,the other lower(Levinand Shah,1977),so that stackingaltersthe characterofevents that includeappreciablepeg-legenergy. Unlike the classicaldip moveout, which is simply the effect of dip on traveltimefor a common-source record (gather), DMO processingcreatescommonreflection-pointgathers.lt effectivelymoves a reflec-
tion seenon an offsettraceto the location ofthe coincident source-receivertrace that would havethe same reflecting point (fig. 9.41). It thus involves shifting both time and location.The resultis that the reflection moveout no longer dependson dip, reflection-point smearof dipping reflectionsis eliminated,and events with various dips have the same stackingvelocity.It is often carried out as a convolutionin the commonoffsetdomains. Levin ( 1971) showedthat the reflectingpoint moved updip (fig. 9.42a)from that for the coincidentsource geophonetrace by L -- (h' lD) cos { sin {. To avoid reflection-point smearing, offset traces should be gatheredat a point a distancef : (- h' lD) sin { updip. However,such a gather is not hyperbolicbut has the
318
DATA PROCESSING
Offset (m)
Offset (m) 50 500 1(X)015002mo
1s002dr0 r l
(a)
(c)
(d)
Fig. 9.38 Velocity filtering of a gather. (From Yilmaz, 1987: 7 1 . ) ( a ) U n f i l t e r e dg a t h e r ;( b ) / k s p e c t r ao f ( a ) ; ( c ) t h e v e l o c i t y filter eliminating wedge from (b); and (d) the transform of (c) to
the time domain showing how noises A and E have been eliminated but B and D retained.
shapeof the DMO ellipse,
Deregowski, 1985). DMO is usually applied after velocity-dependentNMO, but Gardner'sDMO (Forel and Gardner, 1988)appliesvelocity-dependentDMO prior to velocity-dependentNMO. For further information, the reader is referred to Hale (1991: chaps. 3-4) or Bancroft(1991),who discussseveralmethods and give referencesto original sources. For 3-D surveys,the 2-D ellipsein fig. 4.9b becomes "bowl." Raypaths(assuming an elliptical the velocity is constant) lie in a plane containing the sourceand receiver,and this plane intersectsthe bowl along an ellipsesimilar to that given by eq. (4.19).Thus, 3-D DMO is essentiallythe same as 2-D unlessthe azrmuth changes.Under thesecircumstances, if AS is the azimuthangle,eq. (9.101)becomes
. x'-
Vtn x - h 1: 0 . 2sin{
(9.100)
The DMO correctionmakesthis gatherhyperbolic. Because DMO involves considerable computer time, Hale (1991: 2-9) gives an empirical rule that DMO correctionis requiredwheneverit exceedsonehalf the dominant period. By using eqs. (4.11)and (4.22b),the rule is that DMO processingshould be carried out whenever (4s' 1V' t,) sin' { : (LtJL,x)' (s' vult,)> l, (9.101) where /,, is the zero-offset time, t, is the NMOcorrectedtime, 2s is the offset,u, is the dominant frequency,and { is the dip. Correctionsfor DMO can be made in variousways, including prestack partial migration (Vlmaz and Claerbout, 1980).time-domainfinite-differencemethods or offset continuation (Bolondi, Loinger, and Rocca, 1982),Fourier-domainimplementation(Hale, 1984),and integral(Kirchhoff) methods(Hoskenand
'l l*::l?^*l
(e.102)
A diffraction in location-offset space is called a Cheopspyramid (fig.9.42b); it is not a hyperboloid. Application of NMO changesthe Cheops pyramid into a saddle-shaped'surface (flg.9.42c);DMO makes it into a cylindrical hyperboloid(fig.9.a2il.
STACKING
319
0.0 0 .1 i.2
0.4
o.o
o.l o.2 o.3 o.4 o.5
r i l i l llri :
t;]"ili,,,,:,
ir} rrl:l,l ..;
0,7 0.8 0.9 r.O
r#
v.b
t
o.7 0.8 '":
t . l
t.? t.3 t.4 r.5 1.6
v. :,
l.O t.l 1.2
r.3 .
'
t.4
r.5 t.6
r.8 r.9 2.o 2 .1
.
r.8 " r.9 - 2.O
2.1 2.2 2,3 '-"2.4 2.5 ?.6 2.7 2.8
2.\
2.4
2.8 ?.9
a'Y 1.n
J.U
c
Fig. 9.39 Use of ./ k filtering to attenuate multiples. lFrom H a t t o n e t a l . , 1 9 8 6 :9 8 . ) ( a ) G a t h e r ;( b ) g a t h e rw i t h a p p r o x i m a t e
NMO applied; this gather is then./:.1 filter.ed;and (c) gather after filtering followed by removing the approximate NMO.
"""J (r(?
$
J
Fig. 9.40 Velocity-filtered stacked secrion. (From yilmaz. l98l: 76.) (a) CMP stack contaminated by coherenr noise, and (b) filtered after stacking.
9.10.3Muting First-breaksand the refractionwavetrainsthat follow them are usually so strong that they have to be excluded from the stack to avoid degradingthe quality of shallow reflections(seefig. 9.43). This is done by muting, which involvesarbitrarily assigningvaluesof zero to tracesduring the mute interval. Also, the re-
Fig. 9.41 NMO corrects for the time delay on an offset trace assuming zero dip; DMO moves the data to the correct zerooffset trace for a dipping reflection; migration further moves it to the subsurfacelocation. (After Deregowski, 1986: 13.)
DATA PROCESSING
320
T r a v e li tm e
I
(8)
(b)
=-h;
{c}
(d)
Fig. 9.42 DMO. (From Sheriff, 1991.) (a) Terms involved in reconstruction of the reflecting point assuming constant velocity, (b) a diffraction in location-offsetspaceis not a hyperboloid,
(c) NMO correction makes (b) into a saddle-shapedsurface,and (d) DMO correction along with NMO yields a cylindrical hyperboloid.
flection waveshapeon longer-offsettracesis stretched becauseof rapid changesin the normal moveout (fig. 9.30) and directivity effects of geophone arrays. Stretchingeffectivelychangesthe frequencyspectrum of the wavelet,resulting in attenuationof higher frequencies in subsequentstacking. Therefore, longoffset traces usually are muted before the stretching reaches25o/o.Figure 9.27 also shows the effect of muting. of muting is that the multiplicity of A consequence a stack increasesby steps,the shallowestdata often being a twofold stack, slightly deeper data being a fourfold stack, and so on until the full multiplicity of the stack is achievedafter the muted events have passedbeyond the most distant geophones.To avoid amplitude discontinuitiesassociatedwith changesin the multiplicity, the amplitude is usually divided by the number of nonzerotracesthat havebeenadded. Sometimesan innermute (tail mute) is also applied, setting short-offset traces to zero as air waves or ground roll strikesthe geophones.Tracesnear a shotpoint may becomevery noisy as time after the shot
increases,perhaps becauseof hole nolse (noise produced by oscillation and venting of gasesgenerated by the shot and/or ejectionof material from the borehole). Traces near surface sourcesmay likewise become noisy as time increases. Occasionally,a wedge of data across the gather (suchas a portion dominatedby ground roll) will also be muted (surgicalmute),although it is more common to use apparent-velocityfiltering ($9.9)in such situat10ns.
stctcking 9.I 0.4 Common-midpoint Combining a sequenceof common-midpoint gathers after NMO correction yields a common-midpoint s/ack.Multiples spendmore of their traveltimesin the shallowerpart of the earth than do primarieswith the same traveltimes, and hence usually have smaller stacking velocitiesthan the primaries and so do not align on the NMO-corrected gather. Thus, stacking severely attenuates most multiples. Common-
STACKING
321 Even where DMO has been applied to convert CMp traces to common-reflecting-pointtraces,CMp and zero-offsetsectionsdiffer in important regards.Noises on the two types of sectionsare generallymarkedly different,especiallymultiple noise. Amplitude-variation-with-offset(AVO) differences causereflectioneventsto havedifferentamplitude re_ lations to each other than in the zero-offiet case.a point usually neglectedin inversion,and the assump_ tion of hyperbolicstackingmay havealso changedthe amplitudes of different eventsin different wavs (see Yilmaz, 1987: 244, 251). 9.10.5 Weightedstacking
(b) F i g . 9 . 4 3 D e p e n d e n c eo f r e f l e c t i o nq u a l i t y o n m u t e s e l e c t i o n . ( F r o m Y i l m a z 1 9 8 7 : 1 6 4 . )( a ) A C M p g a r h e r .( b ) The srackcd trace resulting fiom varying the mute; the right trace is the same a s t h e i n s i d e t r a c e o f t h e g a t h e r ;t h e n e x t t h e r e s u l t o f s t a c k i n s the two inside traces; the next stacking the three inside traces't a n d s o o n . T h e b e s t m u t e i n c l u d e sa s m u c h d a t a a s oossible w i t h o u t d e g r a d i n gr e f l e c l i o nq u a l i r y .t c ) M u t e d g a t h e r .
midpoint gathers are sometimes apparent_velocity (.fk) filtered ($9.9)to remove coherent noise trarns beforestacking. Common-midpoint stacking ordinarily assumes , that.all trac,es.inthe gather being stackedhaveequal validity and thus should be given equal weight.The output amplitude is divided by the number of live traces entering the stack, that is, adjustments are made for muted and occasional missing or dead traces. A CMP stackedsectionis often regardedas a zero_ offset section, especially when migrating the data.
In certain situations,unequalweighting(producinga weightedstack) of the tracesin a gathermay yield re_ sults that are better than the CMp stack. Offset_ dependentweighting is sometimesused. The differ_ ence in NMO between primaries and multiples depends,for example, on the square of the offset distancesso that better multiple attenuationmay be achieved by weighting the long-offset traces more heavily than the short-offsettraces (fig. 9.44). Most wejghting is empirical, often varying linearly with offset,the weightsusuallyvarying from 0.5 to 1.5. More complicatedweighting schemesare sometimes used. Where the relations betweenstacking velocitv and time are known accuratelyfor primariJs and for one type of multiples,use of a stackins velocitv diflerent from either can maximize atteriuation of these multiples compared with the primaries even though it doesnot maximizethe primaries;this is the basis of "optimum wide-bandhorizontal stackine" (Schneider,Prince, and Giles, 1965).However,be_ causevanous types of multiples havedifferent stack_ ing velocities, this type ofstackingrarelyproducesop_ timum results. One goal of CMP stackingis to producethe reflec_ tron amplitude appropriate for normal incidence. However,amplitudesvary with incident angle ($3.4), that is, with offset,and especiallyso wherethe intersti_ tial fluid changes.One scheme(Denham, palmeira, and Farrell, 1985) fits amplitude-offset measure_ mentswith a best-fitcurve and then givesthe stacked trace the zero-offsetamplitudevalue.Suchprocessing may be especiallyappropriate as a prelude to one_ dimensional inversion, which assumesnormal inci_ dence. Weighting is also sometimesdone to enhanceco_ herence,weightsbeing basedon a coherencemeasure_ ment ($9.3.5) suchas semblance. Enhancement of certain dips can be achievedin this way. Several iterative or adaptive weighting schemes havebeenused(Naessand Bruland, 1985)for vanous types of noise problems.Estimatesof the sisnal and noise amplitudes are usually required. Weighting (Naess,1979)can be used to suppressabnormal amplitudes.Muting (99.10.3) is a type of weightedstack wherenoisy tracesare givenweightsof zerocompared
DATA PROCESSING
322 s.P o.o
o.o
o.l
o .l
o.2
o.2
o.3
.).i
o.4
o.4
o.5 o.6 o.7 o.8 o.9
S.P.
:
0.5
s*ffi
v'0
o-7
tr*
;1:::-iE s:l
ri
+.
r.o t - l l ' 1
t.3
\
o.8 o'9 r.O
*+*'Er+$---_ry_ff l . l
t.2
r.3
| .4
t.4
t . 5
t.:)
t.6
r.6
t . 7
t.7 (b)
Fig. 9.44 Weighted stacking to attenuate mpltiples. (From H a t t o n e t a l . , 1 9 8 6 :9 7 . ) ( a ) U n w e i g h t e ds t a c k w i t h s t r o n gm u l t i -
ples from the sea floor (e.g.,- o.8s s at left) and interbeds (e.g.. - 1 . 2 s ) ; ( b ) w e i g h t e ds t a c k .
with weightsof one for unmutedtraces.Simply eliminating noisy traces is another form of weighting. Sometimesnoisy traces are replaced with estimates basedon interpolationrather than being simply eliminated;this is equivalentto changingthe weightingof the tracesadjacentto the noisy trace.Diversity stacking ($9.10.6) is anotherform of discriminatingagainst noisethat occasionallyaffectsacquisitionin a nonsystematlcmanner.
recordsare relativelylittle distorted by noise. Under such circumstances,amplitude can be used as a discriminant to determinewhich portions are to be excluded.This often takesthe form of merelyexcluding data where the amplitude exceedssomethreshold,or perhaps some form of inverse weighting might be used.Suchnoiseburstsare often randomly locatedon repeatedrecordingsso that sufficientvertical stacking after the weightingtendsto producerecordsfree from the high-amplitudenoises.
9.I 0.6 Diversity stacking Much data processingis far less exotic than is suggestedby the mathematicalrelationshipsexpressedin the foregoingpages.Some of theseprocessesinvolve merelyexcludingcertain elementsof the data, suchas the muting operationthat has alreadybeendiscussed. It is almost always better to throw away noisy data than to include it (often on the theory that its adverse effects will be averaged out). A very powerful processingtechnique,which is not used as much as it should be,is to simply look at the data and deleteportions that appearto be mainly noise. Diversity stacking is another technique used to achieveimprovementsby excludingnoise.Recordsin high-noiseareas,suchas in cities,often showburstsof large-amplitudenoise,whereasother portions of the
9.I 0.7 Simplanstacking Most sourcesare effectivelypoints and henceseismic waves are spherical or nearly so. An alternative to CMP stacking of component spherical-waverecords is to simulatesectionsthat would havebeengenerated by plane or cylindrical waves;suchsectionsare called "Simplan" sections(Taner,I976). Simplanutilizesreciprocity(S4.3.4)and superpositThe sum ofthe outputsofa geophonefor ion ($2.1.4). a number of in-line point sourcessimulatesthe output from a line source,that is, a cylindrical wave.Figure 9.45 shows a split-spreadrecord and the Simplan trace that resultsfrom simple stackingwithout making any time shifts foi normal-moveoutcorrection. Only thosetracesof the gatherthat lie within the first
STACKING
tzJ
R e c e i v e rc o o r d i n a t e
Traces to be simulated o
Jt
;
J*+ 2 It.+
:al sourcelreccrver Posrtrons ( o m m o n r c c e i v c rd i r e c t l o n
F i g . 9 . 4 5 S y n t h e t i cc o m m o n - s o u r c eg a t h e ra n d S i m p l a n t r a c e . (Courtesy of Grant Geophysical.) (a) Gather showing reflect i o n s s y m m e t r i c a la b o u t t h e t r a c e _ r : - 2 h s i n { . w h e r e ( i s t h e dip, and /t the distance to the reflector, as in fig. 4.2. (b) The Simplan trace that results from summing all the traces;in effect. only the first Fresnelzone contributes.
Fresnelzone make an appreciablecontribution to the Simplan trace. Even moderatedip has little effecton the sizeof the zone,so dip has little effecton the Simplan trace. The first Fresnelzone also includesmore tracesas arrival time increases, so that the rate of amplitude decay on the Simplan trace is less than on the tracesof the gather(the Simplan trace undergoes cylindrical divergencerather than the sphericaldivergenceof the componenttraces).The tracesfrom geophones closely spacedcan be used in the same way as the tracesfrom sourcescloselyspaced.Customary group spacingand range of offset distancesare usually sufficientto avoid undesirableend effects. Split-spreadand Simplan recordscan be simulated from end-on records.Note (fig. 9.46a) that the trace at (yo*,,s*) on the surfacediagram is the sameas the trace at (ro,r**,) by reciprocity.Thus, end-on records can be usedto producea split-spreadrecord for twice
Fig.9.46 Simulating split-spread record from end-on records. (a) Reciprocal relations between traces on a surface stacking chart: traces on one side of the zero-offset line have identical raypaths to traces symmetrically disposed on the opposite side of the line; (b) 96-trace split-spread record simulated from 48trace end-on records (courtesy of Grant Geophysical).
DATA PROCESSING
324
s/km f royporomoter, 2
- _. DIRECT .. . uP otP NODtP DIP
3
4
5
-. {t F
=
3
a @
9 a o .g F
(o)
5
r. Jl /'
Fig.9.47 r p mapping. Reflection hyperbolas in time domain map into ellipses in the r p domain and straight lines (direct w a v e a n d h e a d w a v e s )i n t o p o i n t s . ( F r o m S h e r i f f .1 9 9 1 . )( a ) A n end-on seismicrecord /(-r, /), where .r is the source receiverdistance and l is the arrival time: solid lines indicate no dip, dotted
a n d d a s h e d l i n e s i n d i c a t e u p - d i p a n d d o w n - d i p d i r e c t i o n s ,r e spectivcly.(b) r p domain showing points P, for the direct arrival and P. for the head wave H. The dotted and dashed lines show changesif the profile is in up-dip or down-dip direction.
the number of channels,using the common-source for the two and common-receivertraces,respectively, halves of the split. Figure 9.46b shows a 96-trace split-spreadrecord simulated from 4S-traceend-on records.The stack of these96 tracesyields one Simplan trace. Simplan sectionscontain all primaries, multiples, and diffractionswithout amplitude bias or waveform distortion, whereas CMP stacking emphasizesprimary reflectionscompared to multiples and diffractions.
arelisted the I r domain.Severalof theseapplications in Yilmaz(1981:429).Stoffaet al. ( I 98I ) appliedslant stackingto obtain semblance($9.3.5)and eliminate spatial aliasing ($9.2.2d).Clayton and McMechan (1981)appliedthe techniqueto refractiondatato produce velocity depth models.Gardner and Lu (1991) have collected together papers dealing with slant stackine.
9.11.2 Intelligentinterpolation 9.ll Other prccessing techniques 9.I 1.I r-p transformprocessing(slant stacking) The r-p transform or slant stack is a form of Radon transform (see$9.15and eq. (9.22)).When applied to seismicrecords,the slant stack maps the amplitude g(1,x) from the I x domain to the r p domain (fig. 9.47), the integral in eq. (9.22) becoming a summation. Both reflectionand refraction data can be slant stacked.The inverse transformation can be carried out by fllteredbackprojection,as in 513.5.2(seeeq. ( 13 . 12 ) ) . As in the caseof other transforms,the slant stack is usedbecausecertain operationscan be carried out more easily and efficientlyin the r-p domain than in
Intelligent interpolation is an interpolation process that mimics the interpreter'sability to jump correlate using seismiccharacter.It is often based on crosscorrelation, sometimeson recognition of trace attriIt is usedto interpolatebetweendata butes($9.11.4). spacedfour or five times farther apart than spatial aliasconsiderations($9.2.2d)permit if aliasingduring migration is to be avoided.However,intelligentinterpolation does not alter the resolutionof the resulting data, which is determinedby the original sampling rather than that after interpolation. Intelligent interpolation is also used to permit cheaper3-D acquisition ($12.1.2and 12.1.3)to compensatefor relaxed line-spacingrequirementsand to flll in undersampled grid loops of 2-D coverageto create pseudo-3-D surveys.
O T H E R P R O C E S S I N GT E C H N I Q U E S
32s
I
I
rl T{
r
j I
I
i Fig. 9.48
Automatically picked migration section. (From paturet. 1971.)
9.11.3 Automaticpicking Conceptually,eventscan be picked and graded automatically using coherencemeasuresas criteria (paulson and Merdler,1968;Bois and la Porte,1970;Garotta, l97l). Whenevercoherence exceeds a threshold value,an eventcan be picked,the arrival time, NMO, and dip moveoutbeingdeterminedcorrespondingto the maximum coherence.Grades can be assigned basedon coherencevalues,the distanceover which coherencecan be maintainedbeing includedas a factor. The picks can be automaticallymigratedand plotted, as shown in fig. 9.48. Automatic picking can be expandedto include intersectinglines.The picks can be posted on a map and contoured automatically. Thus, conceptually,the output ofprocessingcould be contoured depth maps of reflecting horizons, and much of the work usuallythought of as interpretation could be automated.However,in the process,many decisionshave to be made. Criteria haveto be specified for determiningwhich eventsare primary reflections and which multiplesare for decidingwhat to do when eventsinterfereor terminate,and so on; the processbreaks down or producesmeaninglessresults if each of thesedecisionshas not been anticipatedand specifiedcorrectly in advance. Although automatic picking was never used very much with 2-D data, its equivalent,horizon tracking (see $12.4),is extensivelyused with 3-D data. Improvements in data quality and the areal density of sampling are largely responsiblefor this success.However,horizon tracking still has to be monitored carefully to producereliableresults. 9.I 1.4 Complex-traceanalysis Let us assumea seismictrace of the form C(A : A(!) cos 2rruf,
(e.103)
wherel(r) variesslowly with respectto cos2rvt,. A(t) is the envelopeof g(t), often called the envelopeamplitude. For A(t) constant, the Hilbert transform ( $ 1 5 . 2 . 1 3o )f g Q )i s g i v e nb y (9.l 04) C(t) B,(/) : - A(t) sin 2ivt (seeproblem 15.23a).Thus, we can form a complex signal,l(t), where h(t):
cQ) + jg.(r):
A(t)e-j2rv'
(e.105)
ft(r) being known as the analytical or complex trace (Bracewell, 1965), gL(t)as the quadraturetrace of g(t) (seefig. 9.49). If u is not constant but varies slowly, we define the instantaneous frequency,u,(t),as the time derivativeof the instantaneous phase,y(r); thus,
2nv,(t): : tl' f;en,tt
(e.ro6)
The quantities A(t), lft), v,(t), and other measurements derived from the seismicdata are called attrit butes.
/1 --,
,'ir$e
Comple! seismic t
Fig. 9.49 The complex trace shown as a helix of variable amptitude in the direction ofthe time axis. Projection onto the real plane gives the actual seismic trace and onto the imaginary plane the quadrature trace.
i
DATA PROCESSING
326 To find A(t),1Q), and u,(t),we obtain ftO, either by , atis, e q .( 1 5 . 1 7 6 )t h c,Q) : g(t) * (llltt):
1l/tr) i
t, ,{",*
- t\t,
(e.107) for digital functions(seeproblem 15.23c),or by using eq. (15.177),that is, we calculatethe transform of g(t), set the result equal to zero for negativefrequencies, multiply by 2, and then inverse transform to get h(t). Becausel(t) is real and leiz"'1: l, we seethat
A(t): lh(t)|, l(t):
2rvt : tan I
,,@: L2,;]rrtrlt
t&(r/co)Ll (ero8)
Complex-traceanalysiscan be used in convolution, correlation, semblance,and other types of calculations (Taner. Koehler, and Sheriff, 1979),sometimes facilitating the calculations. Attributes sometimesrevealfeaturesthat are not as obvious otherwise,especiallylateral changesalong the bedding, such as those associatedwith stratigraphicchangesor hydrocarbonaccumulations($10.'/ and 10.8);seeTaner and Sheriff (1977).Phaseplots facilitate picking weak coherent events,and latera'. discontinuitiesin phase facilitate picking reflectiotr terminations as at faults, pinchouts, and so on. Instantaneousfrequencypatterns tend to characterize the interferencepatternsresultingfrom closelyspaced reflectorsand thus aid in correlatinsfrom line to line or acrossfaults.
9.12 Processes to reposltlon data 9.12.1Introduction Seismicdata prior to migration are oriented with respectto the observationpoints. Migration involvesrepositioning data elementsto make their locationsappropriate to the locationsof the associatedreflectors or diffractingpoints.The needto migrateseismicdata to obtain a structural picture was recognizedat the beginning of seismicexploration and the very first seismic reflection data in l92l were migrated (fig. 1.3b). Consider the constant-velocitysituation shown in fig. 9.50 A reflection from a reflector with dip ( at point C underneathE is observedat A and is plotted at C' on an unmigratedsection.Clearly, tan {, : sin {,
(e.10e)
where (, is the apparent dip on the unmigrated section. The reflector lies updip from its apparentlocation, { > €,, and a segmentof reflectionC'D'is shortened to CD by migration. Equation (9.109)is called the migrator'sequation. Migration ordinarily assumesa coincidentsourcereceiver section and is generally carried out after stacking.This usually gives good results where dips
C'D'into principle. of segment Migration Fig.9.50Migration thedip from(.,to (. CDincreases
are small and whereeventswith different dips do not interfereon the unmigratedsection.Migration before stackingalmost alwaysgivesbetter or at leastequivalent results,but is expensivebecausethen many more data haveto be migrated.DMO removesmuch of the need for prestack migration, so that today prestack migration is mainly associatedwith depth migration in areaswherethe velocity distribution is complex. Although the objectiveof migration is to obtain a picture of reflectorsat their correctlocationsin depth, the velocity required for time-to-depthconversionis usuallynot known accuratelyand the result of migration is usuallya migratedtime section,which is a vertically stretchedversionof the depth domain provided velocity variesin the vertical direction only. The pro"depth migration" ($9.12.5)attemptsto account cess for changesin velocity in the horizontal direction as well. Another limitation on migration is the migration aperture,the range of data included in the migration ofeach point; the apertureis often lessthan ideal becauseof the volume of data to be processed. Migration generallyis basedon the premisethat all data elementsrepresenteither primary reflectionsor diffractions.The migration of noise,including energy that does not travel along simple reflection paths, produces meaninglessresults. Migration requires a knowledgeof the velocity distribution; changesin velocity bend raypaths and thus affect migration. Although migration can be extendedto three dimensions with ordinary 2-D seismic lines, we usually assumethat the cross-dipis zero,which resultsin twodimensionalmigration. Ignoring cross-dipsometimes resultsin undermigration,but an undermigratedsection is at least easier to interpret than one not migrated at all. Moreover, cross-dipinformation is often not available,two-dimensionalmigration is appreciably more economical,and the results are often adequate. The simplestapproachto migration is to determine the direction of approach of energy and track the raypath backwards to the reflecting point at half the
P R O C E S S E ST O R E P O S I T I O N D A T A traveltime, or to find the common tangent to wavefronts for half the traveltime;thesemethodswerb extensively used in hand-migrating data. Computer methodsgenerallyinvolvesolutionsof the scalarwave equation,eq. (2.28).We replacethe time with half the traveltime, that is, in effect we start with the energy originating at each reflector, as if each reflector were covered by elementary point sourcesas postulated by Huygens' principle, all actuated at the instant t : 0 (the "exploding-reflector"model). We regard {(x, z, c) as a vertical sectionshowing the wave motion at the point (x, z) at timo / : c, that is, an unmigrated seismic section corresponds to rl(x, 0, l), whereas a migrated seismic section corresponds to tft, z, 0). There are various ways of solving for {(x, z, 0), including (a) integral methods based on Kirchhoff's equation (99.12.2),where the integration is over those elementsin unmigratedspacethat contribute to an elementin migrated space,(b) methods basedon a solution in the frequency-wavenumber domain ($9.12.3),and (c) finite-differencesolutions in the time domain (99.12.4), which accomplishes backward-tracingof seismicwaves in a downwardcontinuationmanner. The methodsdiscussedin the next sectionsaccomplish full-waveformmigration;they involvelargenumbersof calculationsand so are restrictedto computer implementation. 9.I 2.2 Kirchhof (dffiaction-stack) migration Diffraction-stackmigration is basedon a concept of Hagedoorn (1954). We assumeconstant velocity V and convert arrival times to distancesby multiplying by lZ. Figure 9.51a relaresa diffraction pMR and a reflectionMN seenon an unmigrated section.A reflector PQ with dip { passesthrough p at a depth zo, SuPis perpendicularto the reflector.Arcs are swung with centersSo,S,, S", and so on and with radii equal to the distancesto the reflector.Hagedoorncalledthe unmigrated diflraction curve pMR a curve of maximum convexity,becauseno other eventfrom the depth :0 can have greater curvature (see fig. 9.51a). The diffractioncurve is a hyperbolawith apexat p and the unmigratedreflectionis tangent to it at M (seeproblem 9.27). The conceptfor carrying out migration as a manual operationis to plot a diffraction curve for eachdepth and slideit along the unmigratedsection(keepingthe top lined up with zero depth) until a segmentof a reflection is tangentto one of the curves;on the correspondingmigrated section,the reflector is located at the crest of the diffraction curve tangentto the wavefront that passesthrough the point oftangency ofthe reflection to the diffraction curve (fig. 9.51b). The principleis the sameif the velocityis not constantand if the sections,wavefronts,and diffraction curvesare plotted in time rather than in depth. To carry out diffraction-stackmigration,diffraction curves are calculatedfor each point on the section.
321 ,to
sr
s2
s3
.t4
Wavefrontcurvesthrough P Wavefrontcurve through N
Coincident source and receiver
(D)
Fig. 9.51 Wavefront and diffraction curves intersecting at the unmigrated and migrated positions. (a) Unmigrated reflection MN migrates into reflector PQ, (b) relation between wavefront and diffraction curves (from Hagedoorn, 1954).
The data on the unmigratedsectionlying along each diffraction curve are summedto give the amplitude at the respectivepoint on the migrated section.If there is indeedenergyinvolvingthe point at the crestof the diffraction curve, then the addition will produce the value appropriateto the energyinvolving that point; if only noise is present,positive and negativevalues will be equally probablealong the diffraction curve, so the sum will be very small. In effect, diffraction-stack migration treats each element of an unmigrated reflection as a portion of a diffraction, that is, a reflector is thought of as a sequenceof closely spaced diffracting points (fig. 9.52). The relationshipbetweenpoints shown in fig. 9.51b suggeststhat the data at each point could be distributed along the wavefront through that point (wavefront smearing), and when the distributed data for all points are superimposed,they will reinforce wherereflectorsexistbut otherwisepositiveand negative values will be equally probable so the sum will be small. Bursts of noise will not have neighboringelementsto canceltheir effectsand hencewill be smeared out along wavefrontson a migratedsectionto become "smiles"(fig. 9.53). Migration by the method of wavefront smearing producesresultsidentical to diffraction-stackmigra-
328
DATA PROCESSING
:- - l
2 a
2
(a)
"-.'.---:::-:
(b)
Fig. 9.53 A burst of noise on an unmigrated section (a) mi_ grates rnto a wavefront (smile) (b). (From yilmaz, l9g7: 25g.)
1 1 !
1 ! - 1 1 r
1 1 !
k
I
:
Migraringreflectionsas diffracrions. (From yilmaz, 1q._9j?_ 1987:257,258.)(a) A diffraction(below)migratesinro a poinr (above).(b) With a sequence of diffractingloints the diffrac_ tlons tend to mergeto form the reflector.(c) If closelyenough spaced, only thereflectoranddiffractionsat its endsareevrdent.
tion, the only differencebeing in that operationsare performed in a different sequence.The ..common_ tangent" method of migration (Sheriff, l97g) is in effectwavefrontsmearing. A more elegantformulation of diffraction_stackmi_ gration is basedon the Kirchhoffintegral (seeSchnei_ dea 1978). This approach makes it-clear that this techniqueis an integral solution to the wave equa_ tion, as opposed to a finite-differencesolution or a Fourier-transformsolution ofthe waveequation(usu_ ally called "frequency-domainmigration;;. Amplitudes are adjusted for obliquity and diver_ gencebeforesumming along the diffraction curvesin Kirchhoff migration. The former factor givesthe co_ sine of the angle betweenthe direction of travel and the vertical, and the divergencefactor corrects for I,lrzfor 2-D migration or Ilr for 3-D migration. In ad_ dition,.a wavelet-shapingfactor "or..Ct, amplitudes by the i-nverse squareroot ofthe frequencyani phase by 45' for 2-D migration, or by the invers! of the fre_ quency and 90' for 3-D migration. The reasonsfor the wavelet-shaping factor are explainedin Schneider (1978)and Berryhill(1979).Ifwe considercollapsing diffraction hyperbolasas wavepropagationin spheri_ cal coordinates,the near-fieldterms ire generallyne_ glected. How far down a diffraction hyperbola integration (summation)should extend is the aperture_definition problem. In general,the collapseof diffraction hyper_ bolas to points is inverselyrelated to the aperture width. Inadequateaperturewidths effectivelydiscrim_ inate against steep dips and aperture widih can be used-asa dip filter. A generalrule is that the aperture should exceedtwice the horizontal distanceof -rnru_ tion of the steepestdips. Clearly, aperture wi"dth shouldincreasewith depth becausediffractionsflatten
P R O C E S S E ST O R E P O S I T I O N D A T A
329
with depth. Use of a wide aperture also has a detri_ mental effect in tending to organizehorizontal noise wherereflectionsare weak.
ri i rc
9.I 2 .3 Migration in thefrequency-wavenumber domain
H ,
Equation (9.109) provides the basis for freouencv_ domain migration. If velocity is constant,tinesln x, I spacethat havethe sameslope(sameapparentveloc_ ity or same apparent wavenumber) transform by the 2-D Fourier transform into a singleline in r_, to space (fig. 9.54);the separateparallel lines in x, I ipace are distinguishedby different phasesin r,, o space.Fre_ quency-domainmigration changesthe slope of lines in rc..,ro spaceaccording to eq. (9.109); the inverse transform then givesa migratedsectionin x, I space. Thus, conceptually,frequency-domainmigration be_ c9m9l a very simple operation (Robinson, l9g3). (Similar migration, called slant-stack migration, ean done in r, p spaceusing the Radon trinsform; see !e Hubral, 1980.)The problemswith frequency-domain (and slant-stack)migration comeabouf becauseof the assumption that the velocity is constant (see what follows). Stolt (1978) introduced the Fourier-transformmr_ gration method, sometimes called Stolt misratrcn. This methodstartswith eq. (2.30)in two dimensions, the r-axis being along the profile direction and the z_ axis positivevertically downward.Thus,
a#:*KY.3,9
'1
( 9 . ll 0 )
We use eq. (l5.llb) to take the three-dimensronal transform of r!(x, :, /) and obtain \t(x, z, t) r+ V(r,, K., trl) :
K"
[il_*n
z ,t)
exp [-j(r,x * r,z + tol)l d,r d; dl.
x
E q u a t i o n( I 5 .l 4 l ) n o w g i v e s
aru
e+ (jto)'V(r,. r, .o), 3r, D:rlr e+ (jft,)'v(x,. x ,. to). ;x:
a"J, / . x o
(L
o
RELATIVE OUANTITY OF .------_.------ . GENERATED HYDROCARBONS
pectscan also lead to misinterpretation.However,as 3-D work becomesmore common (seefig. 1.21)'the importance of 3-D aspectsis now being recognized more and more (seealso chaP.12). Stratigraphic interpretation involves delineating which representdifferent deposiseismicsequences, tional units, recognizingseismicfaciescharacteristics, which suggestthe depositionalenvironment,and analyzing reflection character variations to locate both stratigraphic changes and hydrocarbon accumulations. Three-D work is especiallyimportant in recognizing stratigraphic features by their distinctive shapes.Hydrocarbon accumulationsare sometimes indicatedby amplitude,velocity,frequency,or waveshapechanges($10.8).The variation of amplitude with angle (or with offset)is one of the newer hydrocarbonindicators(HCl). New roles are being played by seismicmethods in the delineation,description,and surveillanceof reserfurther in $14'4and 14.5. voirs.Theseare discussed Seismicdata are also proving usefulin crustal studies,as aids in indicatingand delineatingdeeperfeawith sedimentary turesthan thoseusuallyassociated exploration. basin
The relation between liquid and gaseoushydrocarFig. l0.l bons generatedby temperature and depth of burial' assuming a geothermal gradient of 22'Clkm. (From Batzie and Wang'
l0.l Basic geologic concepts
t992.\
The interpretationof seismicdata in geologicterms ls the objectiveand end productof seismicwork. However,beforediscussingthis most importantand critical phase of interpretation, we shall review briefly somebasicgeologicconceptsthat are fundamentalin petroleumexploration. Petroleumis a resultof the decompositionof plant or animal matter in areasthat are slowly subsiding. Theseareasare usuallyin the seaor alongits margins in lakesor occasionally in coastallagoonsor marshes, inland swamps.Sedimentsare depositedalong with the organic matter, and the rate of deposition of the sedimentsmust be suliciently rapid that at least part of the organicmatter is preservedby burial beforebeing destroyedby decay.Restrictedcirculation and reducing (ratherthan oxidizing)conditionsfavorablefor hydrocarbon preservationare found in the deeper portions of both marine and lacustrine waters. As time goeson and an areacontinuesto sink slowly (becauseof the weight of sedimentsdepositedor because of regional tectonic forces), the organic material is buried deeperand henceis exposedto higher temperEventually,chemicalchangesreaturesand pressures. generation of petroleum,a complex,highly sult in the variablemixture of hydrocarbons,including both liquids and gases(part of the gas being in solution becauseof the high pressure).Temperaturein the earth generallyincreasesat a rate of 20-55'C/km, in some places (for example,Sumatra) by as much as 100'C/km.The habitat of liquid petroleumgeneration (fig. 10.1)is generally65 150'C, which is usuallyin the 1.5 3-km range.At depths of 3 6 km, reservoirs
interpretation,questionsto be answeredby the interpretation, and cautions to help avoid erroneousconclusions.Deducing the geologichistory of the area is one interpretationobjective.Well data haveto be related to seismicdata so that the interpretationis consistentwith both. Structural maps are commonly the foremost interpretation objective.The tectonic setting usually governs which types of structuresare presentand how structuralfeaturesrelateto each other, so a reviewof structural stylesprecedesdiscussionsof the evidences of various geologicalfeatures.Among the featuresexamined are faults, folded and flow structures,reefs, unconformities, channels, and stratigraphic traps. Workstations($10.2.7)are playing increasingroles in interpretation. Modeling providesa major tool in interpretation. Direct modeling, the making of a synthetic seismogram to show what should be expectedfrom a geologic model, helpsin understandingwhat seismicfeatures should be looked for as evidencesof sought-for geologicanomalies.Inversemodeling, the making of or sonic logs from seissyntheticacoustic-impedance mic data, aids in seeingthe geologic significanceof seismicwaveshapevariationsnear well control, especially in locating nearby stratigraphicchangessuggestedby well data. Lateral variationsin velocity can produce the illusion of unreal structural features.Velocity changes affect structural features much more frequently than usually realized.Unrecognizedthree-dimensionalas-
10.l. l Generationand migrationoJ'hydrocarbont
BASIC GEOLOGIC CONCEPTS predominantlycontain gasrather than oil, and at still greaterdepths,the temperatureis apt to be so high as to causegas to decompose. Sedimentaryrocks are porous, generallybeing de_ posited with about 45% porosity. As sedimentsare piled on top, the weight of the overburdencomoacts the rocks and the porosity becomesless (fig. 5.3.y. Someof the water that filled the intersticesin the rock (interstitialwater) escapes during the compactronpro_ cessuntil the pressureof the water equalsthat of the hydrostatichead correspondingto its depth of burial. If the formation watercannot escape,it becomesover_ pressured(see95.3.4). Petroleumcollectsin the pore spacesin the source rock or in a rock adjacent to the sourcerock, inter_ mingled with the remaining water that was buried with the sediments.When a significantfraction of the poresis interconnectedso that fluids can passthrough the rock, the rock is permeable.permeabilityp..-it. the gas,oil, and water to separatepartially becauseof their different densities.The oil and gas tend to rise, and they will eventuallyreachthe surfaceofthe earth and be dissipatedunlessthey encountera barrier (called a trap) that stops the upward fluid migration. Fracturingsometimesplaysan important role in the movementof fluids to the boreholesfrom which they can be produced. 10.1.2TypesoJ traps The essential characteristic of a trap is a porous,permeablebed (B in fig. 10.2a)overlainby an imperme_ ablebed (l), which preventsffuid from escaping.Oil and gascan collectin the reservoirofan antitline un_ til the anticline is filled to the spill pornl. Whereasfig. 10.2a is two-dimensional,similar conditions must hold for the third dimension,the structureformins an invertedbowl. The spill point is the highestpoin-tat which oil or gas can escapelrom the anticline;the contour through the spill point is the closingconrour, and the verticaldistancebetweenthe spill point and the highestpoint on the anticlineis the amountof closure.ln fig. 10.2bthe closingcontour is the -20g5_m contour and the closureis 30 m. The quantitv of oil that can be trappedin the structuredependsupon the amount of closure,the area within the closingcon_ tour, and the thicknessand porosityof the reservoir beds. Figure 10.2amight be the cross-section of an anricline or a dome, and the trap is called an unticlinal trap. OLher structural situations can also provide traps. Figure 10.2cshowslault trapsin which perme_ able beds,overlain by impermeablebeds,are faulted againstimpermeablebeds.A trap existsif thereis also closure in the direction parallel to the fault, for ex_ ample, becauseof folding, as shown by the contours in fig. 10.2d.Figure 10.2eshowspossibletrapsassocr_ ated with thrust faulting. Figure 10.2f shows a .etratigraphic trap in which a permeablebed grades into an impermeablebed. as
351 might result where a sand gradesinto a shale.Sometimes permeablebeds gradually thin and eventually pinch out to form pinchout traps. (Stratigraphic traps of various types are also shownin fig. 10.42.)Closure must also existat right anglesto the diagram,possibly becauseof folding or faulting. Many traps involve both stratigraphicand structuralaspects. Figure 10.2g shows unconformity traps, which may result from permeablebeds onlapping an uncomformity or bedstruncatedby erosionat an unconformity (seealso fig. 10.42).If the permeablebedsare overlain by impermeableones and if there is closure at right anglesto the diagram, hydrocarbonscan be trapped at the unconformity. Figure 10.2hshowsa limestonereef that grew up_ wards on a slowly subsidingplatform. The reef was originally composedof coral or other marine animals with calcareousshellsthat grow prolifically under the proper conditionsof water temperatureand depth. As the reef subsides, sedimentsare depositedaround it. Eventuallythe reefstopsgrowing,perhapsbecauseof a changein the water temperatureor the rate of subsidence, or becausethere is so much sediment suspendedin the waterthat sufficientlight to support reef growth no longer exists,and the reef may be buried. The reef material is often highly porous and covered by impermeablesediments.Reefssometimeproduce archingin overlyingsedimentsbecauseof differentialcompactioneffects,the reef being generallylesscompactiblethan the sedimentson either side of it. The reef may form a trap for hydrocarbonsgeneratedin the reef itself or flowing into it from other beds. Figure 10.2irepresentsa salt dome formed when a mass of salt flows upwards under the pressureresulting from the weightof the overlyingsediments.Below I 1.5km, salt is apt to be buoyantcomparedto densersurroundingsediments,which tend to subside as the basinsubsides,whereasthe salt tendsto remaln at roughly the same depth. Eventually,the salt becomes cut off from the underlying mother salt and may take on a teardrop shape,overhangingdeeper sediments.The salt dome bows up sedimentarybeds, producesfaulting, and affectsthe nature of the beds being deposited. Consequently,traps may be producedover or around the sidesof the dome and sometimeswithin cavitiesin caprockover the salt, the trapping sometimesresulting from dip reversal,faulting, unconformities,or stratigraphicchanges.Becausesalt is impermeable,hydrocarbonsalso may be trapped beneaththe salt. The primary objectiveof a seismicsurveyfor hydrocarbons is usually to locate structuressuch as those shownin fig. 10.2.However,many structuresthat provide excellenttraps do not contain oil or gas in economic quantities.We also try to derivefrom the seismic data as much information as possibleabout the geologichistory of the area and about the nature of the rocks in an effort to form an opinion about the probability of encounteringpetroleum in the structures that we map.
I I J
M lmpermeable rock Oil water contact Gas oil contact
Spill poinl
R (n
(i)
Fig. 10.2 Sedimentary structures that produce hydrocarbon traps. Permeablebeds are dotted in the cross sections;hydrocarbon accumulations are in black. (a) Vertical section through anticline along line MN in (b); (b) map of the top of the permeable bed in (a) with the spill-point contour dashed; (c) vertical sec-
tion through fault traps; (d) map of the middle permeable bed (f) stratrin (c)l (e) possibletraps associatedwith thrust faulting: (8) graphic tiaps produced by lithologic change and pinchout; the above draping in and a reef (h) in trap a t.aps; in.onfot-ily reef; and (i) possible traps associatedwith a salt dome'
INTERPRETATIONPROCEDURES 10.2Interpretation procedures 10.2.I Fundamentalgeophysicalassumptions Seismicinterpretationgenerallyassumes(l) that the coherent events seen on seismicrecords oi ,rn p.o_ cessedseismicsectionsare reflectionsfrom acoustlc_ impedencecontrastsin the earth, and (2) that these contrastsare associatedwith bedding that represents the geologic structure. Thus, mapping the arrival times of coherent events is relatei to the geologic structure,and by allowing for velocity and migration effects,we obtain a map showing th; geologicstruc_ ture. We also assume(3) that seismicdetail (wave_ shape,amplitude,and so on) is relatedto geologicde_ tail, that is, to the stratigraphyand the niture of the interstitialfluids;we examinethis assumptionfurther in910.7 and10.8. 10.2.2Collet.tionund examinationo/ tlatu (a) Introdaction. The interpreter gathers together all the data relevantto the interpretation,including geologic,well data, and so on. The relevantseismii data usuallyincludeseismicsections, a basemap,and velocity and other data from the field or seneratedin processing. Sometimesthe interpretation is donecon_ currentlywith the 1leldand processingwork, so that the interpreterreceives additionaldata whilecarrylng out the interpretation, and he may be able to feed back conclusionsfrom the preliminaryinterpretation so that field or processing procedures can bechanged or additional work can be carried out, in order to proveor disprovepointsthat are not resolved. Alternativewaysof interpretingdata are almostal_ wayspossible.This "inherentambiguity" existswith almostany data,althoughambiguityin seismicinter_ pretatlonis lessthan with most geophysical and geo_ logic data.Ambiguity arisesbecausedata are incom_ plete and/or inaccurate,and the best way to reduce ambiguityis to add more data.The addeddata misht be more seismicdata, but it also might be information from surface geology, wells, gravity measurements, and so on. The regionalgeologicsettingand concepts about the tectonicstressesto which the resion has beensubjectedshouldalsobe usedas a checkon seis_ mic information. As an example,one sometimesencountersdrsrup_ tions in a seismic reflection. If we explain this as causedby faulting,then we must determinewhat else the fault did. Where did it cut shallowerbeds.or did it die out? Where did it cut deeper beds,or was the lault displacementabsorbedby flowagein mobile salt or shalesediments, or did the fault soleout into the bedding plane?Where is the fault on parallel and in_ tersectinglines,or did it die out laterally?Is the fault a normal fault indicating extensionor a reversefault indicating compression?An interpretationcannot be regardedas completeuntil such questionshave been answeredas completelyas possible.A fault that dies out both shallowerand deeper is difficult to justify
353 (though occasionallythis is the correct inrerprera_ tron). Faultsthat havenot producedeffectson nearby lines may also be difficult to justify. (b) Examining sections. One of the first tasks of an lnterpreterrs to examinethe data for evidencesof mis_ location (do sectionstie properly?)or improper acqui_ sition or processing.Such an examination,'although not conclusive,often uncoversgross errors. Unmi_ grated seismictraces at the intersectionsof seismic linesought to copy.When they do not, mislocationor mislabelingof one or both of the lines is a possible explanation, but differencesin acquisition or pro_ cessingtechniquesalso providepossibleexplanatrons. The title blocks of the sectionsshould be examrned to see what differencesexist. Different_sizearravs. different mixes of offset distances,or different pio_ cessingproceduresmay have resultedin noisecontri_ butionsbeingdifferent.Lack of full multiplicityat the ends of lines or where sourceor geophonespacingis irregular (possiblybecauseof aciesi problems)mav ha.veaffecteddata quality.Featuresthat line up verti_ callyon unmigratedsectionsareespecially suspectbe_ cause geologic features are usually not vertical, whereasthe effectsof staticserrors often are. Occa_ sionally,filesare mixed up and data are assembledin_ correctly.The variousdataelementsshouldbe consis_ tent; if the velocity were assumedto vary. are the assumptionsconsistentwith the structure and the characterof the sections? Are certaindata that show on sectionsmade as intermediatestepsin the pro_ cessingmissingor changedon the finai sections? Un_ explaineddifferencesor departuresfrom what is seo_ logically reasonableshould be investigated, so ihat geologicsignificance is not attributedto errorsin the data. Figure 10.3showsboth ends of a typical seismic section,includingthe data block. The data block is often subdividedinto parts listinginformationabout Iineidentification, dataacquisition,and processine. A g e n e r a l i z el idn ed i r e c t i o na n d h o r i z o n t asl c a l e, o ! U . given.Wherethe horizontalscaleis not indicated,it can be determinedby countingthe numberof traces per centimeter,the trace spacingbeing half the geo_ phone group spacing(assumingno horizontalcom_ positing). The locations at which velocity analyses were run are usually indicated,often with the results of the analysestabulatedas time-velocitypairs.These should be examinedfor consistencyalong the line. The locations of changesin line direction or abrupt surface changes (such as elevation differences or .llng.:r in water depth) should be noted for their pos_ sibleeffectson reflectionquality or attitude.Irregular_ ities in coverageare common in land data becauseof surfaceor accessproblems;theseoften show as irres_ ularitiesin the first-breakpatternsand they may als-o affect reflectionquality and the apparent attitude of reflections.The multiplicity involved in each trace ls sometlmesshown by encoding at the bottom of the section,providing a key to irregularitiesofcoverage.
I
354
GEOLOGIC INTERPRETATION OF REFLECTION DATA
L T N F 1 4A F
2?6 Q4D i. p. O TN O E C O N V O LI U 5IGNBTURE T Y P ES E C T I 0 N: l x t ] 8 0 0 Z ' I v F
@
PF€PAAt!
! L 0 r ! I ] 4 4
^NO
x (
OISIRLBUTFO
!
f f i F l
r y i
5
. . , ' : : ; l.'-
!9!. :F
;" tA " (p-
F'ig. 10.3 Leli and right ends of a seismic section. The data were recorded with a 48-channel streamer with numbered source points every 220 fl, individual traces being spaced I l0 ft (33.5 m) apart (this information can be used to get the horizontal scale). Full 4S-fold CMP multiplicity is not achieved fbr the 47 traces at each end of the line, which may explain some of' the data-quality deterioration evident in these regions, the lack of full muttiplicity affectsmultiple attenuation, so that multiples become more likely in those regions. The locations of velocity
"V" at the top of the section' and analysesare indioated by a the tabulated data give stacking (labeled RMS). interval' and a v e r a g ev e l o c i t i e s( s e ee q s . ( 4 . 2 6 ) ,( 5 . 2 5 1 ,a n d ( 5 . 2 0 ) )a s s u m i n g horizontal velocity layering. The solid triangle above SP 27 indicates an intersecting seismic line; TVF stands for time-variant filter, WD fbr water depth, RMS gain means that the RMS amplitu|;
Y 6 a d
z\ X o
o d 9 t
se 60;
E e
?nt
'= lT
a " B
I N
* !
o o 6 obE c
| i 5 a
(a)
5 r x L 5 5
FAULT TYPE NORIIAL
R € L A T E OT E R X S TENSIOII FAULT G R A V TI Y F A U T T SLIP FAULT L I S T R I CF A U L T (CURVED F A U L TP L A N E )
XORIZONIAT (Tcnrion )
THRUSI FAULI
REVERSE
OIRECTION
M I N I U U H
VERTICAL
MAXIMUH
VERTICAL (0rovilt)
( d ' p < r t S o) X I G HA N G L E (rlro > 45o )
IP
0rp utuollt z5o
to 4oo
X O R I Z O N T A L Foull ploo! no! ( C o m p r c : : r o n)
LOW ANGLE
CXARACIERISTICS
d r r o 9 p a o ro l o n g b.dd'nq
T R A N S C U R R E NFI A U L I
HOR I ZON TA L
H O RI Z O N T A L F o u l t t r o c c o t l c n f , 0 o
TEAR FAULT
lo m0ttnu6 lltet3
W R € N C HF A U L I
@
RIGXT LAIERAL -: ( 0 c r t r o l) (Srnrllrol)
-
;^t-,*
S C I S S O R SF A U L T
lhror vonca olong
XINGE FAULI
tOull slrlc i mot vOrt from normol th.or lo rcvcrs?.
TRANSFORT
OEXTRAL
H O RI O i l I A L
srr'rsTRAL
A!3ociolcd rrlh s c p o , o l r o no r c o l l r 3 r o n ot plolca Nar molcrrolfrl13 .rflt bclrarn rcporotine 9lolt! or onc glola r rrdct up on onolhai il glolr! collida.
(b) Fig. 10.26 Fault nomenclature. (From Sheriff, 1991: I l2 15.) (a) Fault terms; (b) fault types.
376 0 -
2000 -
GEOLOGIC INTERPRETATION OF REFLECTION DATA
t\-r t
\ l
\
::'J.11:{
€
t
\
t
_t \-__
_
A 7 2 7^ r AT 5500tts
E rcoo-
1 6
-
24
a
6000 -
Sooo-
t| \ \l - -
AT Sootus
u N D E R 6 3 o oo v E B B U R o E N 1 4 3 0T H T C X 40 5' FAULT
Fig. 10.27 Compaction and increase of seismic velocity with depth decreasethe dip of fault planes with depth, tending to produce concave-upwards curvature. The left column shows the effect on shale of adding 6300 ft of overburden, thus shrinking vertical dimensions (with no renewedfaulting); the right column indicates how this might appear on a seismic time section because of the consequent velocity increase.(From Sheriff, 1982: 54.1
If the data in figs. 10.28aand 10.28bare transformed into depth sections,we get fig. 10.28c.The components of fault-plane dip are around 55o and 48'. Note that the fault that is nearly straight on a depth section is concaveupwards on a time section becauseof the increasein velocity with depth. If the fault surfaceis actually concaveupwards,the curvature will be accentuatedon a time section.Where the fault was most active (indicated by the most rapid growth in fault throw), the fault surface is most curved. The fault has not completelydied out by the north end ofthe line and hencethe fault traceshouldappear on the intersecting line (fig. 10.28b).As pickedon the E-W section,the fault offsetsthe event I at 1.6 s by only about 25 m, indicatingthat the fault is dying out rapidly toward the east.The fault plane has nearly as much dip in the E-W sectionso that the strike of the fault plane near the intersectionof the two lines is NE-SW and the fault planedips to the southeast.The true dip of the fault plane is about 62o (the apparent dip on sectionsis alwayslessthan the true dip unless the line is perpendicularto the strike of the fault). Fault indicationsare not evident below about 2 s on the E-W sectionso that the fault appearsto havedied out at depth toward the east. In poorly consolidated sediments,such rapid dying out of faults is common. In this instance,we are dealing with a radial fault from a deep salt-coreddiapir locatedjust south and slightly west of theselines;suchradial faults often die out rapidly with distancefrom the uplift. (d) Evidencesfor faulting. A number of the more common faulting evidencescan be seenin the foregoing example. Severaldiffractions can be identified along the fault trace in fig. 10.28abetween 1.9 and 2.5 s. If we had been dealing with migrated sections these diffractions would have been nearly collapsed (but not completelybecausethe fault is not perpen-
dicular to the lines).Terminationsof eventsand offset of reflections (and nonreflection zones) across the fault are other important faulting evidences. Different reflectiondips are often seenon the two sidesof the fault. Someof thesedip changesare real, involving slight rotation of the section as the fault moved along a slightly curved fault plane, drag, and other real phenomena.On the other hand, some (especiallythoseseenthrough the fault plane)are distortions resulting from raypath bending (refraction) in passingthrough the fault planebecauseoflocal velocity changesat the fault. Although the upthrown sediments are most apt to havethe higher velocity at any given level, the polarity and magnitude of velocity contrastsvary down the fault plane as units arejuxtaposedagainstdifferent units, so that the nature of the distortion varies from one place to another. In fact, the distortions may be so great and may change so rapidly as to causemarkeddeteriorationof data quality below the fault, sometimesso great that reflections are almost entirely absent(a "shadow zone") below the fault. This is especiallyapt to be true for CMP sectionsbecauseraypathsfor the componentsstacked togethercrossedthe fault at different places. Occasionally,the fault plane itself generatesa reflection, but generallythe fault plane is a highly variable reflectorbecauseof the rapid changesin velocity contrast along the fault plane. Also, faulting is often distributed over a zone and involves many fracture surfaces.Furthermore,most reflectionrecordingand processingdiscriminateagainstfault-planereflections becauseof the useof arraysand of stackingvelocities that do not optimize such events.In addition, faultplane reflectionson unmigrateddata are usually displacedan appreciabledistancefrom the fault and often the traveltimesto them are so great (becauseof the long slant paths) that they are not recordedand processed.Many of the earlier evidencesfor faulting can be seenfor the growth fault in fig. 10.29(of the type illustratedin fig. 10.21);other faults are also presentin fig. 10.29. The increaseddetail made possibleby 3-D methods often showsnot only more and smallerfaults,but also many that are short along strikeand disconnected(fig. I 2.I 0). The continuity of stratigraphicfeaturesacross faults seenon 3-D horizon slices(fig. 12.14)sometimes providesconvincingevidencethat fault throws havebeenpicked correctly. 10.3.4Foldedandflow structures When subjectedto stress,rocks may fault, fold, or flow, dependingon the magnitudeand duration of the stresses, the strengthof the rocks,the nature of adjacent rocks, and so on. The folding of rocks into anticlinesand domesprovidesmany of the traps in which oil and gas are found. Figure 10.30 shows a migrated seismic section acrossan anticline. Some portions such as l, which are composedof the more competent rocks (for ex-
j
I I
rt ->| k- sooo
0 1.0 T
^ 2.0 5 X 5 3.0 o
o 4.0
sl 5.0 Frg. 10.28 Intersecting unmigrated sections showing faulting. Courtesy of Haliburton Geophysical Services.) (a) North_ ,:uth section, (b) east west section, and (c) depth sections.
6.0
A
Q
o
U 9
v t
l
q l oo d
;
o
o!
E
d
EVIDENCES OF GEOLOGIC FEATURES I
Milc
379
2
00 0 l 0: 0 ] 04 05 06 01 0x
0 0.2 0l 0 0 0 0. 0
t0 l:' l l t 4 t 5 l 7 t x l l : l
0 l l r
l 5 l6 l r : N l 9
rt) t l .1l 14 .15 .ll
40 4 l
44 4 5 4 1
Fig l0.30
Migrated seismicsection showing anticlinal structure in the Central Valley of California. (Courtesy of Getty Oil.)
ample,limestonesand consolidatedsandstones).tend to maintain their thicknessas they fold. Other portions such as 4 which contain lesscomDetentrocks toften shalesand evaporites),tend to flow and slip along the bedding, resulting in marked variations in thickness within short distances.Geometry places limits on the amount of folding that is possibleand lblded structuresalmost always involve faulting (fig. 10.20c).Nore at C in fig. 10.30how a fault is involved sith the foldingand in fig. 10.31how the forcefold is associatedwith the underlying fault and inverted structure. Arching causes extension; often the sediments break along normal faults and produce graben-type featureson the top. Folding must disappearby faulting or flowage at some depth. Anticlinal curvature tendsto make seismicreflectionsweakeras well as increasethe likelihood of faulting and flowage,so that data quality commonly deterioratesover anticlines. Salt flow often producesanticlinesand domes.In many parts of the world, thick salt depositshavebeen buriedfairly rapidly beneathrelativelyunconsolidated sediment.The sedimentscompact with depth and so rncrease their density,whereasthe salt densityremains
nearly constant.Thus, below some critical depth the salt is lessdensethan the overlyingsediments.Salt behaveslike a very viscousfluid under sufficientpressure,and buoyancymay result in the salt flowing upward to form a salt dome, arching the overlying sedimentsand sometimespiercing through them (fig. 10.25).Piercementdoes not necessarilyimply uplift, however,becausesubsidenceof the sedimentssurrounding a salt plug accomplishesnearly the same structuralresult.Often the velocityin "uplifted" rocks is nearly the sameas that in laterallyadjacentnonuplifted rocks, implying that neither was ever buried deeper;ifthey had been,they would haveirreversibly lost porosity and attaineda higher velocity. Grabensand radial normal faults (whosethrow decreasesawayfrom the dome)often resultfrom arching of the overlying sediments(fig. 10.13), to relievethe stretchingthat accompaniesthe arching. Salt domes tend to form along zones of weaknessin the sediments,suchas a largeregionalfault. The sideof a salt dome may itself be thought of as a fault. Figure 10.32showsa seismicsection acrossa salt dome.Shallowsalt domesare apt to be so evidentthat they can scarcely be misidentified. Becauseof the
o
o o
E
-3 h 3
> J
oF.
d
Q
> z o.q o
-
a 6 .1 ;
-Z
>-{u
o i
;l
I
\c
Y .i
)
osvoz66 C ci
'
h ii
1
i,
I
I
t o l o I q )
l >
o
.;:l -o-+
F.g. 10.44 Ray-trace modeling over a salt swell. (From Taner. ,-..ok, and Neidell, 1970.) (a to c): Normal-incident rays (the :rploding-reflector model) to three reflectors; (d) the conse_
quent time section; (e) gathers for modeling offset traces; note the triplication of reflecting points for the left gathers and the reflection-point smear for the steeplydipping one.
:hangethe differentialpressureor velocity.Ofcourse, :he averagevelocity down to a reflectoris affectedby :nclusionof more travel path at water velocity.Figure 10.47showsa seismicline that goes from shallow to deep water; much of the apparent dip is a velocity elTectrather than real dip (comparefigs. 10.46aand 10.46b).The apparentdip can be correctedby chang:ng the velocity function with water depth when making depth calculations.
Lateral velocity changesalso affect the horizontal positions of features(fig. 9.59).This is illustratedfor a diffractingpoint and a simpletwoJayermodel in fig. 10.48(seealso problem 10.l4). The crestof a diffraction usually locatesthe diffracting point, but lateral changesofvelocity shift the crestofthe diffraction. If we consider more complicatedmodels, for example, two dipping layerswith different strikes,seriousdistortions exist that rwou\d be lery dimcult to unravel
t
I
tt--_r---1-
r
4l'' (a)
!
a
t
rtrorlrltl
Fig. 10.45 Section acrossa thrust fault in the Big Horn Basin, Wyoming. (After Stone, 1985.)(a) Seismic section, (b) ray trac-
ing through a depth model, and (c) seismic section predicted from the model.
LATERAL VARIATIONS IN VELOCITY
r
-
-
!
-
t
-
-
-
-
-
_
_
395 -
-
-
D
-
-
-
-
_
_
_
_
_
-
I
-
-
0
I
ir lr
t
or
o l
I
t
2l
l
3
r
r
.
5
xttoHtrllt t 2 l
t
tttt
r l
t
(c)
.:om seismic data. Such a situation could :rsily result wherethe sectionand the seafloor dip in ::tlerentdirections. Correction for gradual velocity changes usually -,inqeson beingable to determinethe velocitychanges ,i rrh sufficientreliability.Often, velocity has to be de::rmined from the seismicdata themselves(see$9.7), :-rr velocityanalyses(although they may be adequate -.rusein stacking)often haveappreciableuncertainty .:lat may make them unsuitablefor such corrections ;.rthoutsmoothing.Displaysof the type of fig.9.32 ::e often especiallyhelpful. Velocity variations are -sually reasonably systematic with structure, al::.r.rugh in attenuatedfashion, that is. velocitv relief is -.ually not as great as the structural relief. Usually, ::ta should be smoothedwith the geologyin mind.
10.5.2Suddenchanges Where lateral changesin velocity are more sudden, correction may not be simple.Considerthe effectsof the sea-floorrelief in fig. 10.49.The velocitiesof the sedimentsimmediatelybelowthe canyonprobablyare markedly different from those of their lateral equivalents becauseof the differencesin overburden,but at large depths,the effectsof the canyon probably vanish. Furthermore,the sedimentsbelow the bottom of the canyon may be in fluid-pressureequilibrium with their lateralequivalents,thus havingfluid pressureappropriate to the uneroded thickness whereas their overburdenpressureis lessbecauseof the erosion,so that they are overpressured.A "correct" method of removingthe velocityeffectis not evident,and usually
GEOLOGIC INTERPRETATION OF REFLECTION DATA
396 FT
OEPTH
ooo
o tooo 2000 3000 4000 5000 60@
I
?!oo
l I 7000
tl
Dcnolcs /nlcrvo/
o too0
804 o
Colculoled Valoctl,
2000 5000
TIM E
r t / >
.oo0
4000
soo €@0
.400
7@O 800
\ t.200
l@o 8000 t.600
20@
--_=*- :reralley filling may also occur.The overallpa&_ sition, or disruptionafter deposition,suchas can be .:: of sedimentsinvolvinglowstandfan, slope fan, produced_byslumping or sliding or turbidity_current .:; iosstand wedgeis called a lov)standsystem tract. flow.A reflection-freeinterval suggestsunifoim lithol_ I: the eustaticfall had been smallerit might have ogy such as a relativelyhomogeneousmarine shale, ::::ll balancedout the effectsof subsidenc"e on sea salt, or massivecarbonates;however,distinguishing :'.el and a sea-levelstillstandand would have re_ reflection-freepatternsfrom multiples and nJise that .-.::d. The sedimentswould first progradeand then obscuresreflectionsmay be difficult. ::iidd€ as relativesealevelbeginsto riseslowly. This Reflectionterminationssuch as onlap (fig. 10.5g) .. -.uld produce a shelf-marginsystem trac.t.A type-2 and downlap (sometimescalled offiap), alriady ae_ ,':-,tnfbrmityseparatesa shelf_margintract from the scribedin $10.7.4,give a geneticcontext:onlao is the -:derlying highstandsystemtract (seewhat follows). the landwardedgeof a unit. whereasdownlapresults .\s a eustaticrise becomesgreater,it will have the from inadequate sediment supply (starvatibn) and ,.me effecton relativesea level as the tectonic subsi_ thus is the seawardedgeof a unit. ::nce: thus,relativesealevelwill riserapidlyand ac_ Oblique progradational patterns (fig. 10.62a)are -,.mmodationwill increaserapidly.The ioastline will characterizedby toplap angularity (aiso sometimes ::rnsgressover the shelf (fig. 10.60b)producing za_ called offiap) and reflection-character ":,;cflooding.Because variability.The the shelfcan now accommodate tops of obliquepatternsindicateperiodsduring which :!rre sediments,few sedimentswill be transported far sealevel was not changingmarkedly (stillstands)and ::!rm the coast,resultingin relativelythin deeo_water depositionnear the wave base,with consequenthigh :eposrts called a conden.sed .re(.tiun.The condensed depositionalenergy.Thus, the tops ofoblique patterns :3ctionis often rich in both numbersof fossilsoecr_ often contain relativelyclean sands.Sigmbid'progra_ :rensand species, and usuallyprovidesthe bestpale_ dational patterns,on the other hand, are character_ ..nrological agedating.The packageof sediments de_ ized by gentle S-shapedreflectionsof rather uniform :rrsited during the rapid sea-levelrise is called a character,the tops of the reflectionsexhibitins con_ -t'Lt nsgres.ltvesls tem t ra( t. cordancewith the top of the sequence unit. Thise in_ .\s the rate of sea-levelrise slowsdown, becomes dicaterelativesea-levelriseand usuallyconsistoffine_ :tatic,and beginsto fall, sedimentsfirst aggradeand grainedsediments,sometimescalcareous. :hen.prograde (fig. 10.60c). The packageoiiediments The three-dimensionalshapeof units providesthe .s calleda highstandsystemtact. A eustaticfall at the principalbasisfor classification in basiniettings(fig. :nd of the highstandsystemtractmarksthe top of the 10.62b).Units that drape over preexistingtopography S€Qtrsng. that beganwith the precedingsea_level fall. ar3 generally low-energy fine-grained pelagic untts. Of course,eustaticvariationswill not usually be a Those with mounded tops or chaotic refleclionsare srmplecycle,as assumedin the foregoing.Small, more generallyvariable-to-high-energy deposits. rapid oscillationssuperimposedon la.g-e.os.illtions High-reflection continuity suggests continuous result in parasequences. The sequenceiwill also not strata depositedin an environmentthat was relatively alwaysoccur in the foregoingorder and the local set_ quiet and uniform over a widespreadarea, such as ting and tectonicsituationswill affectthe patterns that marine shalesinterbeddedwith iilts and calcareous develop.Nevertheless,the system_tractconcepts are shales.Fluvial sedimentswith interbeddedclavs and central to sequencestratigraphy. coalssometimesproducestrongreflections. The lateral equivalents of units sometimespro_ 10.7.6 Seismic'-facies analysis vide the key to identification.Thus, a low_reflectron_ amplitude Seismicfucies ($10.7.1)concernsthe distinctive .facies representingprodelta shales may char_ grade landward into a facies of high continuiri acteristicsthat make one group of reflections look and amplitude resulting from interbeddedsilts and/ differentfrom adjacentreflections;inferences u, to tt . or sands, whereas a low-reflection_amplitudesand depositionalenvironmentare drawn from seismic fa_ facies may grade landward into a nonmarine. low_ cies.Analysis and classificationschemesare given by continuity, variable-amplitudefacies. The prodelta
G E O L O G I C I N T E R P R E T A T I O N O F R E F T , E C T I O ND A T A
4IO Table 10.4Seismic-faciesclassification Regionalsetting
Basisof distinction
Subdivisions
Interpretation
Shelf
Reflectioncharacter Unit shape:widespread sheetor gentlewedge Reflectionsgenerally parallelor divergent
High continuity, high amplitude
Generallymarine Possiblycut by alternatingneritic submarinecanyons shale/limestone, Distinguishon basisof interbedded high/low location comparedto energydeposits,or other lacies shallowmarine clasticstransported mainly by waveaction
Mounded shape
Self margin prograded slope
Other characteristics
Variablecontinuity,low Fluvial or nearshore amplitude,occasional clastics,fl uvial/wavehigh amplitude tlansport processes (delta platform), or low-energyturbidity current or wave transport
Distinguishon basisof location comparedto other facies Shale-proneif seaward of unit above Sand-proneif seaward of unit below
Low continuity,variable amplitude
Nonmarine clastics, fluvial or marginalmanne
Occasionalhigh amplitudeand high continuity lrom coal members
Variablecontinuity and amplitude
Delta complex
Internal reflections gently sigmoid to divergent Occasionalhigh amplitudes
Local reflectionvoid
Reef
Seefig. 10.35
Adequatesediment supply Shelf margin deltaic High energydepositsin updip portions Occasionallydue to strong currentsln deepwater
Moderatecontinuity and amplitude, reflectionsvariable Foreset(clinoform) dips to 10'(averaging 4 5"), steeperdips are calcareous Often fan-shaped (includingmultiple fans)
Internal reflectionpattern Oblique,fan-shapedor overlappingfans
Sigmoid,elongatelens/ fan
High continuity,high to Low sedimentsupply moderateamplitude, Low depositionalenergy uniform reflections
STRATIGRAPHIC INTERPRETATION
411
Table 10.4 Seismic-faciesclassifcation Regionalsetting
Basisof distinction
Basinslope,basin Overall unit shape iloor
Subdivisions
Interpretation
Drape
Sheetdrape Deep marine hemipelagic;mainly clay Low energy
High continuity,low amplitude Drapesover preexisting topography
Mounded
Contourite
Variablecontinuity and amplitude
Deep Low energy
Fan-shaped Variableenergy,slump/ turbidity currents
Fill
Slopefront fill
Low energy Deep marine clay and silt
On^lapping Low-velocityturbidity fill currents
Mounded onlap fill or chaotic fill
Canyon fill
Source:After Sangreeand Widmier, 1979.
Other characteristics
Discontinuous,variable amplitude At mouth of submarine canyons Compositiondepends on what was eroded up above
Variablecontinuity and amplitude Fan-shapedto extensive along slope
High continuity, variableamplitude
High or variable-energy Overall mound in a turbidites topographiclow, gougecommon at base Discontinuous,variable amplitude
Variablesuperimposed strata Coarseturbiditesto hemipelagic
Variablecontinuity and amplitude
GEOLOGIC
+tz
INTERPRETATION
OF REFLECTION
DATA
AGGRAOATIONAT OFFTAP SHETF E D G E oEuouE
SIGMOID OFFIAP
OFFTAP CHANNEL/OVERBANK COMPTEX
MASS FLOW
APPARENT TRUNCATION
S L O P EF R O N T FI L L
MOUND
(a)
Sheetdrape Onlap-fill
(low energy) Moundedonlap-fill
(usuallylow energy)
(high energy)
Chaotic-fill (hi8h energy)
Fan-comPlex (high energy)
(b) Fig. 10.61 Seismic-faciespatterns. (a) Patterns on sersmlcsections. and (b) three-dimensional shapes of basinal sequences (from Sangreeand Widmier. 1979).
shalemay gradebasinwardinto a prograded-slopefacies,whereasthe sandmay gradebasinwardinto highcontinuity,high-amplitudemarine facies. are shown classifications Examplesof seismic-facies i n f i g s .1 0 . 6 2a n d 1 0 . 6 3 . I 0. 7.7 ReJlect ion-character analysis Reflection-characteranalysis involves study of the trace-to-tracechangesin the waveshapeof one or more reflectionswith the objectiveof locatingand determining the nature of changesin the stratigraphyor fluid in the pore spaces.Specialdisplaysmay be used
to make it easierto seethe changes,such as enlarged displaysof the portion of the section being studied, (Tanerand Sheriff, displaysof attributemeasurements lgll:Taner, Koehler,and Sheriff,1979)suchas envelope amplitude, instantaneousfrequency,and so on displays(45'4.5),which often (S9.11.4), or seismic-log color. involve ($6.2.1)are often usedto deSyntheticseismograms termine the nature of the stratigraphicchangethat a change of waveshapeindicates.The various stratigraphicchangesthat are regardedas reasonablepossiUitlti.,sare modeled (Harms and Tackenberg,1972; Neidell and Poggiagliolmi,1977)and matched with
STRATIGR APHIC INTERPRETATION
4i3
/"
ll
C-on thin C-on
&P;;Fr----TF _--r jliJf;.;;",,,,,,, *lrop-dprl 1.P-dwn -Of /r'nir \1&e -
-\
'tiTt:::i:1:,:J"'pr ^ -_Q".,::t,g,,,..
--ra
.\ -h---
- ,^.'" -illll
\
-.-*-
\
:-J.
^
!-'r uil(,ph,i.s 3rr Jrrnd I BJn.n.\rrc(uv{dl
---'\
R...
t-t,i\t,t,
1",) ,/ii/,/'/h
l
,a;f
',7'7'
lfuth*
r::'r;'
h>-
Shotoornl il
I
H,J,,nh,tu. >! ./4
t' -"-t>"4 F i g . I 1 . 7 S o n o b u o y operation. (Courtesy of Select Internat i o n a l I n c .)
'-i-.-----_
I - i g . l l . 6 O u t l i n i n g a s a l t d o m e u s i n g a g e o p h o n ew i t h i n the s a l t . l A f t e r G a r d n e r , 1 9 4 9 . )( a ) p l a n v i e w o f a n a r r l a n a t i c sur_ l a c e ,a n d ( b ) i s o m e t r i cv i e w o f a r a y p a r ha n d p a r a b o l o i d of the ; r p l i r n a t iscu r l a c e .
ll.2 Refraction data reduction and processing Refractiondata haveto be correctedfor elevationand weathering variations, as with reflection data. The correction methods are essentiallythe same except that often geophonesare too far from the source to record the refraction at the baseof the LVL and thus there may be no weatheringdata along much of the line. Additional sourcesmay be used for special re_ l i a c t i o nw e a t h e r i n ign f o r m a t i o n . Whereasthe effect of corrections on the effective source-to-geophone distanceis usually small for re_ flection data, this is often not so for refraction travel pathsabovethe refractor,becausethesemay haveap_ preciablehorizontal components.Hence, the refer_ encedatum should be near the surfaceto minimize sucherrors. The identification of refraction events is usually simplerthan reflectionevents.Traveltimesare usually availablefor a relatively long range of offsets,and henceit is easyto separatereflectionsand diffracrrons uith their curved alignments from the direct wave. surl-acewaves, and refractions with their straight alignments.The direct wave and surf'acewaves are
easily distinguishedfrom refractionsbecauseof the lower velocitiesof the former. Usually,the only prob_ lem is in identifying the different refraction events when severalrefractorsare present. Wherecompleterefractionprofilesfrom zero offset to largeoffsetsare available,playbackof the data with judiciousselections of filtersand automaticsain con_ trol may allow one to correlatereflectionevlnts with refraction events,thus adding useful informauon ro eachtypeof interpretation(fig. I 1.8).The most prom_ inent reflectionsmay not correspond to the most promlnent refractions. Recordsectionsare very useful,especiallyin studying secondarrivals.The refraction profile in fig. I 1.9 shows the direct wave as the first arrival near the source and refractions from successivelydeeper re_ fractorsbecomethe first arrivalsas the offsetdistance increases.Following the lirst arrivals, the continua_ tions of various eventsare seenafter each has been overtakenby a deeperevent. Numerous other events are also seenin the zone of secondarrivals; most of theseare refractionsthat never becomefirst arrivals. or multiply-reflectedrefractions(seefig. 6.39). Another useful refraction playbacktechniqueis to display the data as a redut'edrefractionsection(fig. I l.l0), wherearrival times have been shiftedby the amount xlVo, where.r is the offsetdistance,and Zois a valuenear the refractorvelocity.lf Vowere.*u"tly equal to the refractor velocity,the residual times would be the delay times (which wiil be discussedin $11.4)and relief on the reducedrefractionsection would correlate with refractor relief (althoush dis_ placed from the subsurfacelocation of the.-relief). However,evenif Zois only approximatelycorrect,the use of reduced sections improves considerablythe pickability of refraction events,especiallysecondary refractions. Often, the chief problemin refractioninterpretation techniquesis the assumptionof constani-velocitv
SP336 53,464'
SPlO n t
Fig. I 1.8 Section showing the continuity of some reflectionswith their respectiverefraction events.Recorded by sonobuoy
,l
M a r i n e r e f r a c t i o np r o l i l e .( F r o r n I n g h a r n . 1 9 7 5 :1 3 0 . )
Distance r J J
3 o
0, - N N
o o
I
o ot : o o
sj
3
(b)
o
J J
o 0r -N
N
o o
9
-Ot
U,
o 5 o o
@
(a) R e d u c e dr e f r a c t i o ns e c t i o n .( C o u r t e s yo f P e t t y - R a y Fig. ll.l0 (b) reduced GJophysical.; (a) Conventional refraction sectionl ut SiOti -lt to align highest velocity events; arld (c) reduced at
(c) 2 7 3 5 n V s . S u b t r a c t r n g,v/l/o makes it easier to separate events and simplifies picking.
BASIC-FORMULA INTERPRETATION METHODS layers,hence raypaths that are made up of straight_ line segments;this is usuallynot true, esiecially inlhe shallowestlayers.When using equationsin $4.3to cal_ culate refractor depths, the biggest improvement in the resultsis often due to a more realisticassumption for Z, basedon information other than that obtain_ able from the refraction data themselves(Laski, t973). Problemssometimesresult from a hidden zone, a layerwhosevelocityis lower than that of the overlying bed so that it never carriesa head wave.Energy ihai would approach it at the critical angle cannot get through the shallowerrefractors,and hence there is no indication ofits presencein the refractionarrivals. The low_velocity of the hidden layer, however, rn_ creasesthe arrival times of deeperrefractorsrelative to what would be observedif tiri niaden zone had the same velocity as the overlying bed, hence results in exaggerationof their depths.Another situation,which is also referredto at times as a ..hiddenzone,,,is that of a layer whose velocity is higher than those of the overlying beds but that never producesfirst arrivals despitethis, becausethe layer is too thin and/or its velocityis not sufficientlygreaterthan those of.the overlying beds. Such a bed createsa secondarrival, but the secondarrival may not be recognizedas a dis_ tlnct event. Refraction interpretation often is based solely on ^ first arrivals,primarily becausethis permits accurate determinationof the traveltimes.When we usesecond arrivals,.we usually have to pick a later cycle in the wavetrainand estimatetraveltimefrom the measured trme.However,velocitiesbasedon secondarrivals will be accurateand much useful information is available through their study. Refraction interpretation often involves ..strip_ ping," which is in effectthe removal of one layer at a time (Slotnick,1950).In this method,the problemis solvedfor the first refractor,after which the portions of the timedistance curve for the deeper refractors are adjustedto give the result that wo;ld have been obtained if the source and geophoneshad been lo_ cated on the first refractinghorizon. The adiustment consistsof subtractingthe traveltimesalongihe slant pathsfrom sourcedown to the refracto, und up from the refractor to the geophones,also of decreasing the offsetsby the componentsof the slant paths parallel to the refractor.The new time_distancecurve ls now solvedfor the secondrefractinglayer,after which this layercan be strippedoff and the piocesscontinued for deeperrefractors.
433
two refractors,especiallywhen theseare not Darallel. The basicformulasare commonly usedin the inter_ pretation of engineeringsurveys ($14.1.2)and de_ termining static corrections for reflection seismic work (98.8.2). One of the simplestrefraction interpretationmeth_ ods is the ABC method.With the arrangementshown in fig. I l.l 1, sourcesare locatedat thelnd points of the spread,A and B. Lel tABbe the surface_to_surt-ace traveltimefrom A to .B,and so on; then (seeproblem 11.4) hr. : (ll2)(tr.n * tr." - tn") [V,V2l(Vr2_ V,z!tD1,
( rl . r )
where V, is the overburdenvelocity, and V.the refrac_ tor velocity.(The depth-conversion factor. F :
V,V2l(VrI *
V,lcos0, (ll.2a) often occurs in refraction time-to-depthconversions, for example,in eq. (4.38): h:
Ft,l2,
where /, is the intercept time.) Frequently,V2>> and we can replacethe lactor F by V,; tien hr.:
( V , 1 2 ) ( t . n* t r . " - t u " ) ,
the error in ft.. being lessthan 60l,if V, > 32,. This method assumesthat the overburdenis essentiailyho_ mogeneous, the depth variationsare smooth,the velocity contrastis large,and the dip small.Depth calculationsusingeq. (l 1.3)are generallygood because they dependon the measurementof only one velocity, V,, and three traveltimes.Whereasrefractor dip can be determinedfrom differencesin apparent veiocity as seen on reversedprofiles, it is more often deter_ mined from a seriesof measurementsof depth at different locationsof Cl Better accuracyis given by the four-shot method (gll.l.l), which is efficient for many applications where only a local profile is needed(a .,iounding") rather than a profile line. An application to an engi_ neeringproblemis givenin gl4.1.2. 11.3.2Adachi'smethod Adachi (1954)derivedequationssimilarto eq.(4.42) for the caseof severalbeds with the same st;ike but differentdips. His method departsfrom the usual pa_ rametersand usesvertical thicknessesand anelesof incidenceand refractionmeasuredwith respecito the vertical(seefig. I l.l2). The derivationof Adachi'sfor_ mula is straightforwardbut involveslengthy trigono_
ll3 Basic-formula interpretation methods I 1.3.I Usingba.sic. formulas The basicformulas of $4.3are usedto interpret small amounts of data where the refractorsare aisumed to be planar. Even wheretheseconditionsare met. rnter_ pretationis usuallydifllcult when there are more than
Fig. I L I I
ABC refraction method for determining deoth
REFRACTION METHODS
434
Notation used in Adachi's lbrmula.
metric manipulation (see Johnson, 1976), and we merelyquote the result:
,"- =
" t l ng ' V,
* i
1 l ( . oo, , + c o sB , ) .( 1 1 . 4 )
-V,
where /- is the traveltimeof the refraction at the nth interface(separatinglayersof velocitiesV, and V, ,), ct,and B, are the anglesbetweenthe vertical and the downgoing and upgoing rays in the ith layer,respectively, ft, the vertical thicknessof the ith layer under the source.The anglesa,, b, (seefig. I I . 12) are angles of incidence,a',, b', anglesof refraction, all measured relativeto the normal, and (,*, : dip of the ith interface.Then ai : sin-tl(V,,,|V,) sin a), bj = sin- '[( 4 . ,l v,) sin b), ct,:a,*{,*,, 9 : a,- t,*, a r , : a ' ,* ( , * . , , B,*,: b,| €,*,. For the refractionalong the rth interface,a,: h,,: 0,,, the critical angle. Assumingreversedprofiles,we measureV,, the apparent velocities,Vr, and V"r, and the intercepts,l',, and t,, as usual. For the first interface, : sin t(Vjlv2,i), 9, : sin-'(VJV,,) 0ctr 0 , t : a r - b , : j ( o ,+ 9 , ) ,
valuesof ct,, B,, and then find the other angles(note that (, is now known): t(Vtl V.,), ct, : sin t(Vtl V3,), B, : sin b,:9,+t, ar:a,-t, d! = sin tl(V.lV,)sina,l, bl : sin tf(VrlV,)sinb,l, a,:a'.+ly P.:bi-ty a z : b . : 0 . . : l ( c t .+ 9 , ) : ) A ' + t : 1 , v . = v , l s i n0 , . . {, : l(a, B.). t.,:
( h , l V r ) ( c ocst r + c o s P , ) + (h.lV.)(coso, + cos Br),
/r, being found from the last relation. In principle,this iterativeprocedurecan be continued indefinitely,but in practice,as with all refraction schemes,the errors and difficultiesmount rapidly as the number of layers lncreases. Adachi's formula is best suited to simple cases where the refractorsare plane, no velocity or structural problems exist, and the refractors are shallow. When theseconditions are not met, the formula, in common with other similar ones, may be of limited value.Often, one is not surethat formulasare applicable to a specificreal situation.Where there are more than two refracting horizons, it is often difficult to identify equivalentupdip and downdip segments,especially if the refractors are not plane or if the dip and/or strike change.
€,:l(..,-8,)' reciprocalmethod(GRM ) I1.3.3 Generalized
(seeeq. (4.50)) Vr:
V , l s i n0 , r ,
h , : V r t r " l ( c ocst , * c o s B , ) .
To solve for the secondinterface,we calculatenew
The GRM method (Palmer,1980)is capableof mapping highly irregular refractorsusing reversedprofiles and is relativelyinsensitiveto dip up to about 20'. It
BASIC-FORMULA INTERPRETATIONMETHODS is alsoableto resolvelateralvariationsin the refractor r,elocity(Palmel 1986, l99l); this is especiallyimportant in engineering(wherelow velocity may indicate low rock strength) and groundwater studies (where it may indicate high porosity). The GRM is well suitedfor computer implementation. The GRM involvesselectingseveralpairs of points (X, Y) and making a seriesof calculationsresulting in determining an optimum distancebetweenthem, )f {o,, which approximatesthe critical distancex' in eq. (4.39). Methods for determining XY",, are given toward the end of this section,but approximatevalues often suflice. Our discussionfollows Palmer's 1980 book exceptfor the notation and order oftopics. Figure ll.l3 showsfour bedswith the samestrike but different dips {,. Depths zn, and zBi aremeasured normal to each interface;o, and B, are downdip and updip anglesofincidence,respectively, the anglesat S and ?"also being critical angles.To get the traveltime ti', we consider a plane wavefront PQ passing through A at time t : 0; the wave arrives at (, alter traveling a distance zAt cos o, at time / : (:{r cos ur)lV, The wavefrontreachesR at the time
+5)
Let X and )/ be two points separated by 2a (fi5. l1.l4b). The GRM is basedon the use of a velocityanalysisfunction T, and a time-depthfunction T. referred to G, the midpoint between X and Y. They are defined by ( t u , - t x B+ t A ) 1 2 , T" : (!n, * t r, - t AB- xYlv,')|2, Tr:
27, : .1'\t . i . l, o,cos 0r + z r, cos$,ll V, + AY(S,I V,ll , - .'-' Q r ,c o s 0 i + z " , c o s B ) l V , + X B ( S , | V , ) J LL
. cosc, + :r,cos + .I La 'En, B)IV,+ AB(S,IV,)l : [>
Qz^i
- z.\.r)cos oi I z cos V) B,l ,j
+ (AY - XB + AB)(S,tV,).
: ). r--.coso )/2. t
t
.{ similar expressionholds for /u". Becausethe wave is critically refractedat R and 14the time from R to Z rs RVlVo.Generalizing,we get for n layers
L o c a t i n gP s o t h a t A P : a , e q . ( 1 1 . 7 )i s n o w u s e dt o expressthis result in terms of z. and AG. We have Z , t :i Z r i + a S f ,
The distanceRV : YJ : .6'lcos(€, - t.). Continuing in this manner,we get RV: AB cos l, cos (t. - €,) x cos ({. - t.). In general,we have : )
,t,cos c{i + z,cos B,)lV,+ AB(S,IV,,).
S,-cos{,,
(l 1.6)
( s e ep r o b l e mI 1 . 7 ) . Let X be any point updip from A in fig. I l.l4a. We can expressdepths at A in terms of depths at X as follows: :z^IAH:zr,+AXsinl, : zn I A'H' : zn 4 A'X' sin ((, 9,1 : zn I AX cos€, sin ({, 6,;. For theTth layer,
+ AX. Si,
(rr.1)
: . o r . ( , c o s ( { ,- € , ) . . . c o s ( { r ,€;_J xsin({,-t,,), j>1, :sin{,, i:1.
Z.ri:zpi+(2a-
AqSf,
z r j : z r j - A C , S f, so that n - l
f r:
cr,* cos 9,)l2V >l zpr(cos n l ("or cr,- cos p)Sf DV + S,lV,l
+ ACII
(lr.s)
w h e r eS , : c o s { , c o s( { , - € , ) . . . c o s ( { , , - € , . ) . We assumehenceforththat the dip increasesslowlyso that {, - €, , : 0. In this case,
{t
(l 1.9)
where V,' is an apparent velocity (definedbelow by eq. (ll.ll)). The refractorvelocity V,can be found from T, and the depth from Io. B y u s i n ge q .( l 1 . 5 )i n e q .( l 1 . 8 ) ,
l
7
(11.8)
(I 1 . 1 0 ) This equationshowsthat, for a fixed a, AG and Trare relatedlinearly; hence,the slope dl,./dx is the coefficient of AG in eq. (l Ll0); we definean apparentvelocity V,' such that dT,ldx: llV:.
(ll.ll)
When the dip variesslowly,^f is small (becauseof the sinefactor in eq. (l 1.7))and S, reducesto cos {,_, (see e q . ( l 1 . 6 ) ) ;t h u s ,t h e c o e f f i c i e not f A G t n e q . ( 1 1 . 1 0 ) b e c o m e cs o s l , , 1 V ,a, n d f r o m e q . ( 1 1 . 1 1 ) ,
4-
v',cos{, ,.
(n.t2)
Thus, if the dip {, , is known, V, can be found from the apparentvelocity V,';if not, \' canbe usedas the refractor velocity. I f w e s u b s t i t u t e q . ( 1 1 . 5 )i n e q . ( 1 1 . 9 ) , I
n
F
T.: rIL
l
k * c o s 0 r + z r y c o s Bv,,) l
+ ir1s,tv,- uv,,)1.
REFRACTION METHODS
436
Fis. I l.l3
T h e l a s t t e r m v a n i s h e sb y e q s .( 1 1 . 6 )a n d ( l l . l 2 ) ; moreover,if the dip is small, z.r.i- zr;i- ;r,. Thus, I., reducesto n
I
Palmer (1980: 13, 14) statesthat T. is similar to Hagedoorn'splus value ($11.5.2)when X)' : 0, to Hales' "critical reflectiontime" (r' in 911.5.3)when XY : XY"o,,and to the mean of the geophonedelay t i m e sa t X a n d Y ( $ l 1 . 4 . 1 ) . We definea depth-conversionfactor, V,,: 2V,l(cos ct,* cosB,).(Comparethis with eq.(l 1.2),notingthat V,^: 2F becauseof the factor ll2 in eq. ( I I .9).) We c a n n o w w r i t ee q .( 1 1 . 1 3i)n t h e f o r m n
:
l
T
,
L't;t
n
l
-- \
L
I
- - c ti ' ' r vn ' t
tll'14)
For zero dip,V,0".i..,
on usingSnell'slaw;theprimessignifythatthevelocitiesareobtained fromeq.(l l.l l). ) ,eg e tf o r t h e S e t t i nxg: A G : 0 i n e q .( 1 1 . 1 0w interceptof thevelocity-analysis function n
l
\ i -"fcos 0i + cos 9,ll2v, ,-
(l l . l 6 ) Comparing with eq. ( I I . I 3), we seethat the intercept of In is approximatelyequal to the time-depthat P The GRM can use averagevelocitiesto determine the depth to a refractor without referenceto the actual layering. Assuming horizontal plane layers,eq. (ll.l3) becomes n
l F
To= L(",coso',)l V,, '
s i nc r : 7 t v ; , , t t t . t Z 1
7 , , = ( z , c o so ) / Z
the lorm of eq. ( I L I 7) is preserved. When R and S in fig. 1l.l4b coincide,the distance XI is the criticaldistance,X1"", (seeeq. (4.39)): ^ X Yo p r : I
E r
> - t-' t. . t a n 0I .
H
I
We define the XI,,n, for the single constant-velocity case: XY : 2:L.tans.
( l 1.20)
Eliminating:, and o betweeneqs.( l 1.l8) and ( I 1.20), we find that
v : v " l w l t x y + 2 7 , ; v : ) l t , ) (. l t . 2 l )
V,,: V,lcoso,: ViV;ll(V,'),- (V;),1',,, ( tl . l s )
T t u: - r'r.r
If we replacethe actual section by a single layer of thickness:t.: L zGiandconstantvelocity Z with an angleof incidenceo such that
l
r^ G - l,S u - r , f c o s o . , - l c o s B ) l V(, 1 1 . 1 3 )
'r ( '
R e f r a c t o r sw i t h t h e s a m es t r i k e b u t d i l l e r e n t d i o s
sincr,:VilV,.
(tt.tz)
lf x)' is assumedto be X{.,, which can be found by methodsdescribedin the next paragraph,7,, and V', a r e n o w g i v e nb y e q s . ( 1 1 . 9a) n d ( l l . l l ) . E q u a t i o n (ll.2l) then gives V, after which a and then:r are g i v e nb y e q . ( l 1 . 1 8 ) . To achievemaximum accuracy,the GRM requires a knowledgeof the critical distance,X{,n,, that is, the value when the forward and reverserays leavethe refractor at the same point. Determining this value is "potentially the most confusingaspectof the GRM" (Palmer, 1980: 34). Approximate values sulfice for most purposes(X{0, is relativelyinsensitiveto dip); however,accuratevaluesare requiredifthere are hidden zones ($4.3.1).Palmer gives three methods of finding XY.,,: (a) from knowledgeof the thicknesses and velocitiesof all layers,for example,from borehole information; (b) from the separationof distinctivefeatures on forward and reverseprofiles,such as sharp changesofslope; (c) from trial calculationsof 7",.and
B.{SIC-FORMULA INTERPRETATION METHODS
437
---l
F-200ft
sP # r..
sp# n".
No.75 1800ft- +l DATUM
sp *
n",
S . ' }. l't'f"r"l t.r .l t,a* t"k*0- r\
7/1990 B H P 1 7 9 0p s i
1/1990 BHP 2300psi
1/1992 B H P 1 7 4 0p s i
fr
'a]
1952 BHP 3200psi 1977 B H P3 0 0p s i
f,l eerrorations [-_l sptuy l-l':Jlchannel F i g . 1 2 . 1 4 T h e r e s e r v o i ri n t e r v a l f o r t h e f o u r w e l l s s h o w n t n plate 17. Each of the four wells has different pressurehistories and bottom-hole pressures(BHP). The separations shown are w e l l - h e a dd i s t a n c e sa; l t h o u g h t h e w e l l sa r e a l l p r e s u m a b l yv e r t l -
or higher hydrocarbonsaturation (tuning effectsexcepted). Problems l2.l Reconcilethe spatialsamplingequation(12.1) w i t h e q .( 8 . 2 a ) . 12.2 (a) For an operation involving towing two sourcesand three streamers,what spacingsare requiredto achievea minimum bin sizeof 25 x 25 m? (b) To achieveuniform midpoint line spacing,what ship tracks? distancewill separatesuccessive 12.3 Assumingthat hydrophonegroupcentersin fig. l2.ld are 50 m apart and that the ship speedis 6 knots, calculatethe cross-currentat two locations. 12.4 (a) Whereasseismicships sometimestow three or more streamers,they only rarely usemore than two (array) sources.Why? (b) Marine shallow-waterswathand patch techniques often use more source than geophone locations, whereasthe practice is usually the opposite on land.
whv? 12.5 Conventionalmarine operationsinvolvea taper in the CMP multiplicityfor half the streamerlength at eachend of a line. How much taper is involvedwith the circlemethodsillustratedin figs.12.2aand 12.2b? 12.6 A survey over a marine prospect used a single patch with six parallellinesof 96 receivergroupseach in sea-floorcables with a 50-m group interval, the
c a l . t h e y p r o b a b l ym a y d e v i a t eb y 1 " . T h e v e r t i c a lt i c k s a r e l 0 f t ( 3 m ) a p a r t . C h a n g i n gt h e p r e s s u r ei n w e l l I 7 5 i n a n i n t e r f e r e n c e test did not aflect the pressurein well 202. (Al1er Hardage, 199-l: courtesy of the Texas Bureau of Economic Geology.)
lines being 400 m apart' The geophone/hydrophone sourceboat towing an air-gun sourcetraversed20 linesperpendicularto the receiverlinesspaced250m apart with air-gun pops every 50 m, thus covering nearlythe sameareaas that occupiedby the receiver lines. (a) What is the minimum bin sizethat can be used'l (b) How much multiplicity will be achievedover differentparts of the surveYarea? (c) Assumethat the 3000-mdeepobjectivehorizonts a nearlyflat erosionalsurfaceand that the trapping is stratigraphic,so that amplitudesmust be mapped accurately.If the averagevelocity is 2500 m/s, how largean area can be mappedwith confidencel(d) Assumethat the objectiveformationsdip 20" away from one edgeof the area. How large an area can be mappedconfidentlY? 12.i-Assumea land surveyemployingsix E W lines of | 12 geophonegroupseach with geophone-group spacingof 35 m, the geophonelines being 400 m apart. Fifteen N-S vibrator lines are spaced300 m apart with the sourcepoints betweenthe four center linesspacedat 70-m intervals. (a) What is the minimum bin size?What pattern ol multiplicity is achieved?How much variation of offset and azimuth mix is involved? (b) If three geophonelines are moved for successtve parallel acquisition blocks, what is the effect on the multiplicity, offset,ar.rdazimuth mixes'J
R E F E RE N C E S
a o o a o a o a o a o
e o a o e o E o g o s
€ c E
C
6
o E o E o E o a o e o l a o a o s o B o E
I r g . 1 2 . 1 5 A l o o p l a y o u t f b r 3 - D s u r v e y i n g .S o u r c e p o i n t s are : n t l i c a t c db y X . g e o p h o n cg r o u p c e n t e r sb y O .
1 2 . 8 I n o n e 3 - D t e c h n i q u es, o u r c ep o i n t s ( x ) a n d r e o p h o n e(sC ) a r e l a i d o u t a s s h o w ni n f i g . 1 2 . 1 5a; l l thc geophonesare recordedlor each sourceDolnt. This arrangementemploys 4g geophone stations, :pilced50 m apart,and 48 sourcepoints,spaced100 nr apart. r a ) L o c a t ea l l t h e " m i d p o i n t s 'a, n d d e t e r m i n e t h e i rr e _ .pectrvemultiplicity.(Hint; lJtilizesymmetry to save * o r k .) i b ) N o t e t h a t s o m eo f t h e m i d p o i n t sf a l l o u t s i d e the \quare.lf this layout is repeatedwith common geo_ phonelines,thesepoints will fit in adjacentsquares. \\'hat effectwill this haveon multiplicitv,l 1 2 . 9A n E W f a u l t c u t s t h e , t . r i . t r r . s h o w nr n f i s . 11.9.How largeis its throw assumingthe velocitya't :hc mappedhorizonis 3000m/s?Drew a depthcross .s'ction l b r a n a r b i t r a r yI i n ep e r p e n d i c u l at or i h e t a u l t . \\'hat sort of fault do you think is involved? 12.10Locatepossiblefaultson fig. 12.I I and indicate :heirpossiblethrows.Sketchdips on oppositesidesof .rnelault lor an arbitraryline alongthe iault. Assume :hat Iines/cross-lines are25 m apartand that the domi_ :rantfrequencyis 40 Hz. l2.ll Locateseveralplaceswherelaultsshowon one ..f the displaysin plate6 but not on the other. 12.12Interpretthe faultsin plate9. 1 2 . 1 3W h a t a r e t h e a d v a n t a g easn d d i s a d v a n t a g o e fs. .r -l-D marine survey recordedin the dip directron Jtrmpor€d to one in the strikedirectionin iermsof (a) -ross-linesmear,(b) DMO, (c) spatialaliasing,and 1d.y , elocityestimation? 12.14Will a saltdomeappearlargeror smallerbased rn 2-D migrationof a coarsegrid of linesthan on a nigrated3-D survey? A swathsurveyis to be recordedusingl0 paral_ lJ.l5 ei geophonelinesspaced50 m apart,eachiontaining . I stationsspaced50 m apart.Two sourcelinesoer_
467 pendicular to the geophonelines are located at the endsofthe geophonelines;eachcontainseight source locationsspaced125 m apart symmetricaliylocated with respectto the geophonelines. What will be the minimum bin dimensionsand what multiplicity will be achieved? 12.16 A land surveylayout is shown in fis. 12.16. (a) In the southern 213of the area whereipacing was regular,what is the smallestbin size that should be used?What is the best multiplicity achieved?How wide is the multiplicitytaperarea?What is the small_ est bin sizeif squarebins are desired?For the best_ multiplicitysquarebins,what are the offsetand azi_ muth ranges? (b) Answer the questionsin part (a) if four of the smallestsquarebins are compositedto give a larger squarebin? (c) How much degradationis causedby the irregular spacingin the northwestern part of the area,assumlng the largersquarebins are used? 12.17 Copy fig. 12.13and cut along the junction be_ tweenthe VSPand the 3-D data.Slidethe two up and down to ascertainthe confldencein the match. As_ suminga velocityof 6000ftls, how much shift is in_ volved?What would be the effecton the match if the VSP and 3-D embeddedwaveletswere lg0o out of phase'? If theywere90oout of phase?How mucheffect might a changein waveletshapehave. 12.18 Assumethat the wellsindicatedin fig. 12.14deviateby l"; how much might this changethe bottomhole separations? 1 2 . 1 9T h e w e l l ss h o w ni n p l a t el 5 w e r ea l l d r i l l e db e fore the 3-D survey.What changesin well locations would you expectil the 3-D surveyhad beenavailable?Wherewould you recommenddrilling new wells now assumlngthe horizonis flat and that hishercolor i n t e n s i t yi n d i c a t ebs e t t e rp r o d u c i b i l i t y ? 12.20 Interpretchannelsystemsin plate l7 as best you can.Considerthe locationuncertainties indicated by problem 12.18.What amplitudelactorsaffectthe interpretation?This is the land surveydiscussedin p r o b l e mI 2 . 1 6 . References A b r i e l , W . L . . P S . M e a l e .J . S . T i s s u e ,a n d R . M . W r i e h t . 1 9 9 1 . M o d e r n t e c h n o l o g yi n a n o l d u r e a : B a y M a r c h a n d r e v i s i t e < J . Tltc Lcading Edge. 10(6):21 35. B e e ,M . F l . J . M . B e a r d e n .E . F l H e r k e n h o f f ,H . S u p i y a n t o ,a n d B. Kocstoer. 1994.Eliicient 3-D seismicsurveys in a jungle en_ vrronment. Fir.ytBreuk, 12:253 9. Bouvier, J. D.. C. H. Kaars-Srjpesteijn, D. F. Kluesner, C. C. Onyejekwe, and R. C. van der Pal. 1989. Three-<jimensional s e i s m i c i n t e r p r e t a t i o n a n d f a u l t s e a l i n g i n v e s t i g a t i o n sN , un River Field,Nigeria.Bull. AApG, i3:1397 1414. B r o w n , A . R . 1 9 8 3 . S t r u c t u r a l i n t e r p r e t a t i o nf r o m h o r i z o n t a l seismicsections.Geopltl,sits,48: ll79 94. B r o w n , A . R . 1 9 8 5 .T h e r o l e o f h o r i z o n t a l s e i s m i cs e c t i o n si n stratigraphic interpretation. Sei.vni c S ta r igrapi_r,.Lf,O. R. Berg and D. G. Woolverton, eds., pp. 37 48, AAPG Memoir 39. Tulsa: American Association of Petroleum Geoloeists.
I
i *i ,,0i.- i
I I l
I
l
I
lt
r
I
I
I _*?...........i....1......:
O
1320 lr
-f*t
@ @
o
l
r l t
l
O
l l l
I I I
o
I
l
12,320 tt o Well
-
f993iy91
Fig. 12.16 Layout of a land survey of a 2.3 by 3'5 mile area (S.Z mi'). For a single swath, l12 stations spaced 110 ft apart were laid out on each of 6 E-W geophone lines (dotted lines)' potnts with vibrators traversingN-S lines (dashed)with vibrator "rolled" are lines southernmost three The ft apart. 220 spaced
- - - Sourcc
-
Boad
in four northward for the next swath. The area was mapped access Vibrator shown)' are swaths fourth (the and first swaths (After in the northern part was restricted to the trails shown' Economtc Hardage, 1993; courtesy of the Texas Bureau of GeologY.)
R EFERENCES
469 Brown Seismic ^A. ry 1991 Interpretarionof Three-dimensional Duta.Jd ed.AApC Memoir42.Tulsa:American Assoctatlon of PetroleumGeologists. Brown,A. R. 1992.Definingreservoirproperties.ln Reservor fulia: Societyof feophysics,R. E. Sheriff,ed., pp. lSS_ZO^0. ExplorationGeophysicists Brown,A. R., G. S. Edwards,and R. E. Howard. 19g7.Fault slicing- A new approachto the interpretationoi iault de_ tarl. Geophysics. 3): l3l9 27. Dahm, C. G., and R. J. Graebner.19g2.Field developments with three-dimensional seismicmethodsin the Gulf of Thai_ land A casehistory.Geophysics,4T:149 76. Enachescu, M. E. 1993.Amplitudeinterpretation of 3_Dreflec_ tion data. TheLeadingEdge,12:673 95. Galbraith,R: M., and A. R. Brown. 19g2.Fieldappraisal with three-dimensional seismicsurveys, offshoreTrinidad.Ceophys_ ics,47: 177-95. Greenlee,S. M., G. M. Gaskins,and M. G. Johnson. 1994.3_ D seismicbenefitsfrom explorationthrougha.u.loprn.nt, nn txxon perspectle.TheLeadingEdee,13:7304.
Hardage, R. A. 1993. Notes for Re.seryoirGeophysics Short Course. Tulsa: Society of Exploration Geophysicists. Jeq B. I., C. H. Kaars-Sijpesteijn, M. p A. M. peters, N. L. Watts, and J. Y Wilkie. 1993.Akaso Field, Nigeria: Use of integrated 3-D seismic, lault slicing, clay smeiring, and RFT pressure data on fault trapping and dynamic leakage. Butt. AAPG,77: I 389 1404. Nestvold, E. O. 1992.3-D seismic:Is the promise fulfilled? Iie Leuding Edge, ll(6): 12 19. Rosencrans,R. D. 1992. Cost-effective3-D seismic survev de_ sign. The Leading Edge, tl(3);17,24. Stanulonis, S. F., and H. V Tran. 1992. Method to determrne porosity thickness directly from 3-D seismicamplitude within carbonare pool. prudhoe Bay. Ttv'LtttJing Etlge, !!g_Li$yrl,. ll(t): l4 20 Sheriff, R. E. 1991.EncyclopedicDit.tionarl,tl Exploration Geo_ phy.sics,3d ed. Tulsa: Society of Exploration Geophysicists. Sheriff, R. 8., ed. 1992. ReservoirGeophvsics.Tulsa: Society of Exploration Geophysicists.
13
Specialized techniques
Overview Lesser-usedtechniquesare discussedin this chapter. Seismologistsshould be familiar with ttrem because they provide the most efficient means of galning neededinformation under specialcircumstances. S-wavesdependon differentelasticproperties _ than P-wavesand henceyield additional iniormation when combinedwith p-wave studies(gl3.l). Especrally in anisotropicsituations,,as is likely wherefracturrngis present,they may yield more definitive information than obtainable from p-waves.Additional infbrma_ tlon can also be obtainedby treatingwavemotion as a vectorwith three-component recording($13.2)rather than dealingwith only the componeniof motlon in one direction. waves trapped in low_velocity channels ....S^.ll-i. ($13.3) can be usedto obtain informationabout the propertiesof the channels.However. their analysisis difficult becausethey are highly dispersrve. seismicprofiling (VSp) ($l3 4) providesone -Vertrcal of the bestmeansof relating,eflection'events to the specificinterfacesinvolved in their generation. VSp alsoprovidesthe meansto see,with liigherresolution than availablewith surfacedata, whaimay Lie ahead of the drill bit or what changesmay lie to'the sideof a borehole. Tomographicmethods(913.5)provide a different kind of approachto invertingt.uulltir. (ana, in ttreory at least,amplitude)measurements to determrne distributionsof velocity(and absorptiveproperties). Although their use is relativelyn.* unO the best meansof applicationare still being developed, they are especiallyapplicableto resolving boiehole_to_ boreholemeasurements. The time-lapsetechnique(g13.6)consists of. re_ peatingmeasurements in order to determinechanges that may have occurred over time. This technrque is usedmainly in reservoirstudies. In additionto velocitysurveys,VSp,and cross_hole surveys,measurements within boreholes($13.7)include surveysto determinehow closea boreiole rs to the flank of a salt dome. Waveform logging allows analysisof the velocitiesof different*auJiooi.s, ano the boreholeteleviewerprovidesin effecta picture of the wall ofa boreholeand showsfeaturessuchas frac_ turing. Passive seismic measurementsrely on natural sourcesto generateseismicwaves.Joint inversion uses a different kind of measurement(such as of gravrty) 471
as an aid in seismic interpretation. Geostatistical methods interpret rock properties from geophysical measurementson a statistical basis, allowing for changesbecauseofvarious unknown factors. 13.1Exploration with Swaves 13.L I Why explore with S-waves Nearly all seismicexploration is carried out with p_ waves,the assumptionbeing that p-wavesalone are involved and that any S-waveenergy presentmerely contributes to the noise. However,conversionof p_ wavesat interfacesmeansthat S-wavesare involvedin seismicobservations evenif we wish to avoidthem. P-waveshave advantagesover S-waves:they are easierto generate,only a single mode exists,they travel faster and so arrive first, and they are easierto interpret.However,S-wavesalso haveadvantages:(l) S-wavevelocity dependson different propertiesthan P-wavevelocity(p versus(I + 2p)-see eqs.(2.5g) and (2.59));(2) S-waveshave two modes (Strzand SH-see 92.4.l), which is both a complicationand a potentialadvantage. Thus.S-wave..oiry dilTerentinformation from P-waves.If both p- and S-waveveloc_ itiescan be measured,then we havea sourceof addi_ tional informationabout the subsurface. Figure5.12 suggeststhat such information should indicatelithol_ ogy, and fig. 5.26 suggeststhat it should also indicate the fluid contained within a rock's pore space.The shear modulus p is most important in engineering studiesbecauseit relatesto the ability of the earth to support structures.The shear modulus along fault planes seemsto change in anticipation of earth_ quakes.S-waveexplorationis the subiectof a book e d i t e db y D a n b o ma n d D o m e n i c o( 1 9 g 7 ) . The SZ-mode involveswave motion within the nearly vertical plane that contains the raypath, whereas the S.I/-mode involves horizontal motion. The SZ-mode is involved in conversion at near_ horizontal interfaces,but the S.F1-mode is not. The potential advantagesof S-wave exploration have resulted in appreciableeffort being devoted to developingS-wavetechniques.However,a methodology has not yet evolved. 13.1.2S-w,ave re 0,, the critical angle.A parallelwavefrontthat occupiedthe same position AC earlier,then was later reflectedat the upper and lower boundaries,following raypathssuch as EFGH and BDAI, now coincideswith the later waveEF + FG + GH : BD -t DA,we front at,4C Because phase differencebetweenthe two wavesis seethat the r(BD + DA\ + mr I e, wherelz is 0 or l, nrn is the sum ofphase reversalson reflectionat the two boundaries,and e is a phaseshift that occurs when 0 > 0, (Officer. 1958: 200 l). For a water layer, m : l, whereasm : 0 for a coal seam. For constructiveinterference,we must have -r.,(BD + DA) + mt I e 2nn. Because DA + BD : /r/cos0 + (ft/cos0)cos20 : 2ft cos 0.
F'ig. 13.18 Waveguidephenomenon. (a) Wavesbouncing back and forth in a layer oi velocity ( becauseof nearly perfect reflectivity at the boundaries, (b) construction to show reinforcement conditions, and (c) phase and group velocity relationship'
we have 2r,ft cos g:
(4nhv,lV,)cos0 : (2n - m)r - e,
or v, : l(2n - m) - (elr)lV,l(4h cos 0)' (13.1)
Neglectinge lor the moment.we get constructiveinterferencewhen (13.2) v , . : ( 2 n - m ) V , l ( 4 hc o s0 ) .
CHANNEL WAVES (NORMAL-MODE PROPAGATION) For a water layer,m -_ 1; hence, .l v, : V,l(4hcos 0 ). v r : 3 V , l ( 4 hc o s0 ) : 3 u , .I
:
rt:':l
I
v,: (2n _ I )v,.
)
which correspondsto an open organ pipe (exceptfor the factor cos 0). For a coal seam,m : 0, and
v, : Vrl(2hcos0), v, : 2Vtl(2hcos 0) : 2r,,1 v n :n v t ,
(13.4)
I
which is analogousto a closedorgan pipe. Thus, provided the original wave generatedby the sourcecontains the appropriatefrequencies,normal-modepropagationconsistsof a seriesof wavesof frequenciesv, and its odd or evenharmonicspropagatingalong the waveguideby reflection at angles 0 that satisfy eq. ( 1 3 . 3 o) r ( 1 3 . 4 ) . In addition to the upward propagatingset of wavefronts parallel to AC, there is a symmetrical downward-propagatingset parallel to PQ in fig.
\\ \ 5
2.O l.E 1.6 t,4 1.2
Im E
U
1l
\ \ Fundamental mode(n = l)
0.6 0.1
t
o.2
1
1.0 vhlV,
(1 3 . 5 )
V : V,lsrn0.
Because0 is a functionoffrequency(seefig. (13'2)to (13.4)), Z is also frequency-dependent'so that the wavemotion is disPersive. The minimum value of 0 is the critical angle 0,; hence,there is a minimum cutoff frequencyv0,where (for a water layer)
(1 3 . 6 )
v , , : V , l ( 4 hc o s0 , ) ,
the correspondingphasevelocity V being V : V,lsin but Z decreases. v increases 0, : V..As 0 increases, In the limit, 0 -+ jn (the grazing angle),v --1 -, afld
tan fe: (p,/p,)[tan' 0- (VtlV2cos 0)2]'/2
U//
l
0.4 0.6
13.18cand the interferencebetweenthe two setscreatesa standingwavepattern along the perpendicular to the waveguide.As a result, the wave motion is propagatedparallel to the boundariesof the waveguide.The velocity Z, is the phasevelocity normal to the wavefronts,but there is a different phasevelocity V in the direction of the effectivewave propagation. By referringto fig. 13.18c,wavefrontsAC and PQintersectat R, and therewill be a local buildup of energy maximum propagatesin the here.This energy-density direction RR'',if AC and A' C', alsoPQ and P' Q', are the wavefrontpositionsone time unit apart, then the phaseat R movesto R' in one time unit so that V : RR', that is,
V -+ V,. If we do not neglecte, the formulasare more complicated,but the resultsare basicallythe same.Officer ( 1 9 5 8 )s h o w st h a t f o r e > 0 , ,
\ N
1.0 0.8
I
lh*.J-
ER_I {Tt
v
485
2
4
6
810
:0,
0=
:fI,
0:
e,, l.rt
'
]
t r :z r
(a)
Fig. 13.19 Channel-wave propagation for a liquid layer on an elastic substratum. (a) Phaseand group velocity versus normalized frequency where ctrlct, : 2r/3, o, : 0.5, o" : 0.25. and p"lp, : 2.5 (from Ewing, Jardetsky.and Press, 1957). (b) First-
mode wavetrain from a source 4 km away. (c) The highfrequency portion ofpart (b), which is called Ihe water wave; rls onset is sometimesused in marine refraction work to determine the range. (Parts (b) and (c) from Clay and Medwin' 1977.)
SPECIALIZEDTECHNIQUES
486 Typical curves of Z versus u for a water layer are s h o w ni n f i g . 1 3 . 1 9 fao r n : 1 , 2 . The group velocity U is given by IJ:v*rdv=v-vdv. dto du For a water layer, fig. l3.l9a shows that the term v(dVldv) is never positive; hence, U < Z Moreover, although v(dVldv) increasesin magnitudeat first as u increasesfrom the value u,,,eventuallythe term approacheszero as u approachesinfinity (becausethe derivativegoesto zero faster than u goesto infinity). As a result of thesefactors, U has the value 4 at the to a minimum U,,, cutoff frequencyu0,then decreases at somefrequencyv,,,afrer which it increasesasymptotically to the value V, at v = *. A normal-mode wavetrain for a water layer is shown in fig. 13.19b.The first arrival is a waveof frequencyv,,that has traveledwith the maximum group velocity Z,; this is followed by wavesof increasingv and decreasingU until U reachesthe value Z, at which time a very high-frequencywave, which also on the has traveledwith velocity 2,, is superimposed first wave. Following this, the frequenciesand group velocitiesof the two wavesapproachu,,,and U,,,,respectively.The burst of energy beginning with that travelingat velocity Z, to that of the energytraveling at L/,,,,theoften-abruptend of the normal-modewavetrain, is calledthe Airy phase(asin fig. l9c).
Clearly,a channelwavein water must be a P-wave, but in solids,severalother typesofchannel wavescan exist. Love wavesand SZ-wavesin the surfacelayer can be explainedas normal-modepropagation(Grant and West, 1965:8l-5). Figure 13.20showsrecordsfrom five geophonesat differentpositionswithin a coal seam.The amplitudes in the roof and floor are relativelyweak. The fundamental modes have their largestamplitudesnear the centerof the coal seam,whereassecondharmonics (with double the fundamentalfrequencies)havetheir largestamplitudesat nearly ll4 and 3/4 points with a node near the center.Different modes can be generated preferentiallyby varying the sourcelocation up or down within the coal seam.Variationsin elastic constantsof the coal and bounding lithologiesproduce asymmetriesand complexwaveforms. Mason,Buchanan,and Booer(1980)studiedchannel wavespropagatingin coal seamsand found the wave motion to be very complex. They found both and PSH-modes,calledfrrson or pscudo-Lov€w*ar€s, (fig. v':aves pseudtt-Rayleigh or Krey SZ-modes, called 13.22b).These modes are all highly dispersive(fig. 13.21).Wavesobservedwith orthogonalgeophones usuallyhaveto be rotated($13.2.2)to separatewave modes,as in fig. 13.22(which also showshodograms for two portionsof the wavetrain).The eventsshown in figs. 14.6and 14.7are channelwaves.
-T
.lr
'.'"ri}'ft,nnr,U?l I'1r.'n'-*'^ f l i '
o
-
Olrirncat
In
mat.tr
o o-
a
t
t
: ; : i ! l l : i i F I i i : i I lf E lxs)
(a)
Fig. 13.20 Channel waves observed at different elevations within a coal seam. (From Reguiero, 1990.)(a) Positions of geophones and (b) records of the respectivegeophones.
(b)
VERTICAL SEISMICPROFILING (VSP)
48'7 13.4 Yertical seismic profiting (VSP) I3.4.I General
5
20
Fig. 13.21 Dispersion of the fundamental mode of channel wavesin a coal seam.(From Mason. Buchanan, and Booer, I 980.)
Usually,the seismicsourceand geophonesare located at or very near the surface.Most borehole surveys, such as conventional well-velocity surveys ($5.4.2), measureonly the traveltimeof the first energy.In contrast, verticalseismicprofling (Kennett, Ireson, and Conn, 1980;Cassell,1984;Fitch, 1984)involvesrecording the complete waveform at regularly and closelyspaceddepth stations.Extracting velocity information is only one of the objectivesof VSPs.They becamemore common in the late 1970sand 1980s. but the cost of occupyinga boreholefor the time required continuesto deter their greateruse. A VSP generallygivesbetterdata than surfaceseismic methods becausethe energy does not have to travel as far and thereforeundergoeslessattenuation. the resolutionof a VSP is usuallyapConsequently, preciablybetter than that of surfaceseismicdata. 13.4.2VSP typesund their uses
UNROINTEO
l l R I B. , , . , . ^, ,^. .. . .
...,1.11'
I nl8 ^rAr,rr,ur lr r"vf ^ilill^^1,^^l,,,llllr, .r-"r.rrvy' vffyilv,||eiluilll\, \ t r \
',\*"1\\
The most common VSP in vertical (or near-vertical) holes,a zero-offsetZSP (figs. 13.23aand 13.23b),uses a singlesourcelocatednear the wellhead.ln an ofset ZSP (fig. 13.23c), the sourceis locatedsomedistance from the wellhead,often 900 2100 m, to give data away from the borehole. An alternativeway of obtaining such data is a walkaway VSP (fi9. 13.23d),in which the sourcelocationsare moved to successively farger distancesfrom the wellhead. Azimuthal VSP surveyslocatesourcesin different directionsfrom the wellheadto investigate changeswith azimuth.Combinationsof the foregoingare usedin deviatedholes in directionalZSP surveys($13.6.5);in marine directional VSP surveys,a sourceboat often travelsso that it is verticallyabovethe geophonewith anothersource locatednear the wellhead.Balch and Lee (1984)and Hardage(1985)describevariousVSP techniques.
8O]FIEO
T
2()() (c)
Fig.13.22 Records from orthogonal geophoneswithin a channel. (From Reguiero, 1990.) (a) Unrotated records, (b) hodograms of portions of the wavetrains involving Krey waves (left) and Evison waves (right), and (c) records after rotation.
Fig. 13.23 VSP raypaths. (a and b) Zero-offset VSPs (WS is small); (c) offset VSP (l/,S large); and (d) walkaway VSP (tr/S, >> WS,). Downgoing arrivals at a well geophone G are shown in part (a) and upgoing waves in (b, c, and d). A, a downgoing direct wave (first arrival); B and C, downgoing multiples involving reflectors above or below the geophone; O an upgoing primary reflection; and E, an upgoing multiple.
S P E C I A L IZ E D T E C H N I Q U E S
488 The basictask of a zero-offsetVSP is to match seismic eventsto specificinterfaces.Becausethe depth of the well geophoneis accuratelyknown, time-depth relationshipsare establishedprecisely,and thus reliable reflectionidentificationand subsurfaceseismicvelocities are obtained(seefig. 12.13).Zero-offsetVSPsare also used to identify multiples (see fig. 13.29) and other events,and to study reflectionsfrom below the bottom ofthe borehole(becauseofthe increasedresolution) to aid in decidingif a well should be deepened ("looking aheadof the bit"). Payne(1994)claimsl525-m resolutionwhen looking ahead600-1200m. "look to the Offsetand walkawayVSPsare usedto side" of the boreholeto seeif a major change,suchas a fault or reef. occurs near the borehole and hence that the findings from the borehole may not apply to the nearby region. The greater resolution of a VSP may help delineate small faults, stratigraphic changes,and thin reservoirsands.An objectiveformation may havebeenfaulted out or a well may be on a nonproductiveside of a fault so that sidetracking may encounterproduction (Puckett, | 99| ). Detection of reservoirsjust missedis especiallyusefulwherehydrocarbon indicators($10.8)are observed.Surveys usinggeophonesin deepholesare also usedin searching for and defining nearby features such as salt d o m e s( s e e$ l l . l . 3 a n d 1 3 . 7I.) . Use of a three-componentborehole geophone yieldsadditional information as to the direction from which energyapproachesthe geophoneand also helps distinguish converted-waveenergy (Noble et al., 1988).S-waveVSPscan be acquiredon land using Swave sources and a three-component geophone ( $ l- ? . 2 . 1 ) . Much work is now underway(Hardage,1992;Massell. 1992)to find a source that can be used in the borehole.This would allow a multitude of geophones to be located on the surface. Such a reverseVSP
o.o
nilE (d
o.4
13.24 ReverberatoryVSP tracesin a casedhole wherethe cement bond betweenthe casingand the boreholewall is absent. (Balchand Lee,1984:158.)
would markedlyreducesurveytime and cost.By using multiple-sourcelocationson the surface,one can generate a 3-D VSP; however,such surveystoday would requireso much time in the boreholethat they are run only rarely, but they should be feasible once more effectivedownholesourcesare developed.A borehole energysourcemust be nondestructiveto the well. One schemeusesthe vibrationsof the activedrill bit as the energysource;this involvescontinuousrecording for several minutes and cross-correlationof geophone outputs with the signal that travelsup the drill stem, somewhatsimilar to Vibroseisprocessing. VSPs can also be used(at least in theory) to study absorption(from amplitudeand waveformchangesin the downgoing wave; see $6.5), crack orientation (from S-wavebirefringence;see$2'6.2),permeability (from tube waves),dip, variationsof reflectivitywith incident angle,convertedwaves,and so on' 13.4.3Recordinga VSP Ordinarily, the well geophoneis lowered to the botwell tom ofthe boreholeon standardseven-conductor cablesand stoppedfor eachrecordingon the way out of the hole. Both open and casedholes are used for recording VSPs.The geophonemust be firmly coupled to the formation for recording(unlessthe phone is locked to the boreholewall upgoing reflectionsare usually too weak to be recordedbecauseof the noise often present).It is important that the casingbe well cementedto the formation(fig. l3.24),althoughsatisfactory resultsare sometimesobtainedin older poorly cementedholes where the formations have collapsed onto the casingover time. Recordingoften cannot be done wheremultiple-casingstringshavebeen set (see fig.13.27b). The depth sampling should conform to sampling theoremconstraints;when V: 2000m/s and u : 100 Hz, \ : 20 m, so the samplinginterval should be less than 10 m ($9.2.2c).However, sampling is usually coarserthan this in order to cut costs,and 20 to 50 m depth samplingis common. Someslackis givento the cable at each recording to prevent disturbancefrom energytravelingdown the cable.Thus, only one (or at most a very few) geophonelocationscan be occupied at a time. Consequently,a VSP survey is timeconsumingand expensive,the cost of occupying the boreholebeingthe major exPense. To achievethe samewaveform for each of the many sourceimpulsesrequired,the sourcewaveformshould be very repeatable.Sourcesare usually kept small becausetheseare richer in high frequencies.The most common marine sourceis a small air-gun array,but a single,largeair gun is preferredby somebecauseit is more repeatable,although its spectrumis poorer. On land a water-filledpit 5 m deep and 6 to 7 m across can be usedwith an air gun 2 to 4 m deep; the mud pit is sometimesused for this. The waveformsfrom explosivesin boreholesare generallynot sufficiently reproducible unless special precautions are taken,
VERTICAL SEISMICPROFILING (VSP) such as centeringsmall chargesinside a heavycasing or a borehole of large (-l-m) diameter. Explosive chargesare usuallysmall.often0.I to 1.5kg: the vertical stackingofrecords ofseveralsmall chargesis preferable to using a larger charge. Impulsive surface sourcessuch as weight droppersare sometimesused. The most common land sourceis Vibroseis,which has the added advantageof distributing the energy over time so that backgroundnoise,often largenear a well, is averagedout. Usually, severalsource impulsesor Vibroseissweepsare stackedto build up t-hesignal strength. Much of the surfacenoise is attenuatedby stacking the recordsfrom severalsourceimpulsesat eachdepth. A monitor geophone(or hydrophone)located near the sourceis usedto verify the constancy of the sourcewaveform. Well geophonesare necessarilyrather massive(fig. 13.25)in order to withstandwell pressures and temperatures.An ideal VSP phone (Hardage,lgg5: 47 52) would have (l) three orthogonal sensorswith identicalresponsecharacteristics, (2) a meansof determiningsondeorientation(tilt and azimuth),(3) a retractabledevicefor locking to the boreholewall, (4) a mechanismto determinethe coupling,(5) downhole digitizing(now ofren l2 bits),(6) smalldiameterand weight, and (7) meansfor measuringat severaldownhole locationssimultaneously. A boreholegeophone with all thesefeaturesdoesnot yet exist. A boreholeis an efficienttransmitterof tube waves becausethese attenuate very slowly with distance. Tube waves(92.5.5)can be generatedwheneverthe boreholefluid is disturbed,as by the interactionof groundroll (the most likelycause)or of a p-waveat a contrast in the borehole (e.g., air water surface, changein boreholediameteras at the baseof surface casing,boreholesonde,bottom of borehole,or at a particularly permeableformation). Tube waves are also reflectedat suchcontrasts.The most troublesome tube waves, which sometimesobscure reflections. are Stoneleywaves($2.5.3)that travelat about the pwave velocity in the borehole ffuid. Generally,tube wavescannot be eliminatedby frequencyfiltering, but often their generationby ground roll can be weakened considerablyby lowering the fluid level in the borehole. Tube-waveinterferenceis substantiallyreduced by firmly clampingthe well geophoneto the borehole wall becauseaxial tube-wavemotion is very much smaller in the wall than in the boreholefluid. Although in theory tube wavesgive information about formation permeability,this is usually not a VSp objective. The needfor detailedinformation about the region immediatelysurroundinga boreholeis often greatest in the marine environmentwhere well costs are very high and many wells are drilled from a platform. Thus, deviatedwells are common and many VSps are run in deviatedholes.Well geophonesmust be gimbalmounted to maintain correct vertical attitude. Schimschal(1986)makesthe following points regardingVSP acquisition:(l) Make suresondedepth
489
D O W N H O LVES P S P I K EP L A N T E D .AN'GEOPHONE GEOPHONEPACKAGE PACKAGE T Y P I C A LP A R A M E T E R S : T Y P I C A LP A R A M E T E R S : L € N G T H- 3 m L E N G T H- l O c m D I A M E T E R l- O c m OIAMETER-3cm MASS - | O0 kg g m s MASS 2OO
F'ig. 13.25 Comparison to scale of conventional land geophone and well geophone. The well geophone has a pivot arm for locking the geophone against the borehole wall. (From Har-
dage, 1985: 36.) is zeroedat the well head; (2) record five to six levels as the tool is being lowered;(3) checkthe depth reading, and determinethe gain and numberof recordsto be stackedto achievethe requiredsignal-to-noiseratio at total depth; (4) take at least five records and monitor at everylevel;(5) slackthe cableafteranchoring; (6) reoccupythe down levelsand checkboth times and waveforms:(7) avoid washed-outzoneseven if it causesunevenspacing;and (8) recheckdepth at well head. 13.4.4VSPproces.sing A portion of a zero-offset VSP is shownin fig. 13.26a. The slopeof the first breaks(direct-wavetraveltimes) givesthe velocity.Reflectionshavea slopeoppositeto the first breaks.By using this difference,it is possible to separatedowngoingwaves(which consistof direct wavesand multiples involving an evennumber of reflections,as in fig. 13.23a)from upgoing waves(reflections and multiples involving an odd number of reflections;seefig. 13.23b).The upgoing wavesmay be 30 dB belowthe downgoingwaves.One way of separating downgoingfrom upgoing wavesis to subtract or add the direct arrival times.Subtractingaligns the traveltimes of the downgoing waves horizontally, making theseeventsmuch more readily seen.Adding the traveltimesof the direct arrival emphasizesthe upward-travelingwaves(fig. 13.26b),but the downgoing wavesare usually still evident becausethey are stronger.The separationcan be done more completely by apparentvelocity filtering (fig. 13.27);it is usually
SP E C I A L I Z E D T E C H N I Q U E S
490
Velocity (m/s)
888
oooil 1; i t : 7 '
ti tl
^ :
o : 2.0
t+ . t , t 1800 i
) I.
l i i{--
i1 l]
t l
1 l 3000I { t . !
1 I
(h\
and Fig. 13.26 Vertical seismicprofile. (After Kennett, lreson' geoC o n n . 1 9 8 0 : 6 8 0 , 6 8 2 , 6 8 3 . )( a ) E a c h t r a c e i s r e c o r d e db y a (b) The ohone in the borehole using an air gun at the surface travdirect-wave by the shifted has been iame except each trace
more effectiveto attenuatethe downgoingwaveswith a narrow band-rejectfk filter than to simply passthe upward-travelingwavesthrough a narrow band-pass however,in.fk filter. Filtering in the fk domain, 'volves smearingand wraparoundaliasing($9'9)'Median filtering(Hardage,1985:189-94)often produces better separation.Downgoing and upgoing S-waves can be separatedin the sameway as P-waves' All the downgoingenergy(exceptfor the P- and Swavefirst arrivals and tube waves)must be multiples' Becausewe know both the input and the desiredoutput (a singlespike),a Wienerfilter ($9'5'5)can be designedto ..-ou. surfacemultiplesalmost completely and lisP deconrolution).Moreover, the downgoing upgoing multiples differ mainly by an additional reRection at ot n.u. the surface(which is apt to be a simpleinterface);therefore,the upgoingmultiple pattern will be nearly the sameas that of the downgoing multiples, so that the deconvolution filter for the downgoingmultipleswill effectivelyremovethe upgoing multiples.The samedeconvolutionoperator may be appliedto nearby surfaceseismicdata (fig' l3'28)' Th. t.uc.. of the upgoing VSP are often stacked togetherto yield the pattern of primary reflectionsfor coirelatingto conventionalsurfaceseismicdata' Only the portionsjust below the well geophone(CC' in fig'
(c)
\d)
reeltime, thus horizontally aligning upcoming eventsincluding the flections. (c) Portion of the surface reflection record across well. (d) Sonic log in the well.
13.29)are stackedin a coruidor'slack,theseportlons are most apt to be relativelyfree of peg-legmultiples' Corridor itacks are usually better than synthetic (fig' ,.ir-ogrurn, made from well-log measurements the because i::Ol iot relatingreflectionsto interfaces and frequencies measurementsare made at seismic ofthe are not sensitiveto logginguncertainties'Stacks points reflection involving VSPs offset fo.tions of nearestthe boreholeare also usedfor this purpose' With offset and walkaway VSPs, the reflection points move awayfrom the boreholeas the geophoneio-reflectordistanceincreases'For a vertical borehole points and horizontal reflectors,this gives reflection VSPA l3'3lb' iocatedas shownin figs. 13'31aand (and (fig' 13'32) data the rc-inp tans/brm relocates place the.reflections grid) to regular a resamplesto at theieflecting points assuminghorizontal reflectors' also' This transform incorporatesa NMO correction combined be can VSPs Vuttioffs.t (but copianar) be exwith this transform, and conceptuallyit can tended to 3-D for azimuthal VSPs' VSP-Io-CRP or untransforms can accommodatedeviated holes can geophysicist experienced u.uul g.o.n.tries, and an seelng lrom geometry recording the often figure out the transformPattern. reMigration of offset VSP data to move dipptng
-6?
o
W A V E L E N G T (HM E T E R S ) -lOO -250 (I) 250 IOO
6?
.,,.' .;,',;,,, ;.:';,;',;;'.t.:;/l I
#',,t,;l$ t',.'t..tll
AMPLITUDE
N F t!
z
t! D g trJ
4o
L
5o
=-a
I ffl
oro-2odB -zo ro -40dB
E|
-40 ro -60dB
l-]
rESSrHAN--60dB
6
-16
-10 0 10 (per km) WAVENUMBER (a)
16
T | M E( S ) l.o
2.o
,H-
q9
3.O
4.O
+ CEMENT
* rTrOusPtC, 'EcMAESNrTN c
T F
+ CEMENT
oLJ
o
2300
2900
+ O P E NH O L E
3500 |
(b) F i g . 1 3 . 2 7 f k f i l t e r i n g o f V S P d a t a . ( A f t e r H a r d a g e , 1 9 8 5 :l l l , l 1 3 . ) ( a ) f k p l o t o f V S P d a t a ; a n a p p a r e n tv e l o c i t yf i l t e r p a s s i n g only data between the straight lines (lz: 1800 and 4000 m/s)
rejects most of the nonupgoing energy. (b) VSP data after the indicated /:k filtering and AGC; the shallow data are poor because of a double-casing string.
SPECIALIZED TECHNIQUES
492
F U
DEPTH
T I
3 0 -
c
U
t
I
T c Fig. 13.28 Surface seismicdata (a) after conventional deconvolution and (b) after deconvolution with VSP-deriveddeconvolution operator. (From Kennett, Ireson, and Conn, 1980:
fie.10.) flectionsto the reflectorlocationsis somewhatdifferent from that of CMP data. After a VSP-Io-CRP transform, reflectionsare horizontal if the reflectors are horizontal but curve if the reflectors dip (fig. 13.33).VSP migrationcorrectsthis. Alignments on a VSP are not straight becausevelocity varieswith depth.They can be made straightby stretchingthe time scale(fig. 13.34).Such stretching beforeseparatingdowngoingfrom upgoingwavefields improvesthe separation.VSPsoften contain gapsbecauseof acquisitionproblems(suchas causedby poor contact with the formations);interpolation along the straight alignmentsof upgoing or downgoing waves can fill in for the missingdata. Much VSP processingis the sameas usedwith conventional seismic data. This includes wavelet processingto shortenthe embeddedwaveletand shapeit to the surfacedata to which it is to be matched.Data are often displayedusing AGC with a fairly long time constant,or, whererelativeamplitude is required(for example,beforeinversion),a correctionassumingthat amplitude variesproportionally to llV2t ($6.5'l) may be applied,followed by a small exponentialramp (or very slow AGC) to allow for absorption,transmission, and other losses. 13.4.5VSPplanning Ray-tracemodeling is used in planning VSP surveys to determinesourceoffsetsfor the requiredsubsurface coverage,frequencycontent required to resolvefeatures,Fresnel-zoneeffects,eventsto be expected,and so on, to make sure that objectivesare achieved.It is also used as an aid in understandingthe VSP evidencesofgeologic featuressuchas dip, faults,angular
Fig. 13.29 Model of a VSP showing all multiples for four layers-.Data from the region CC' just following the first arrivals is relatively free from intrabed multiples.
unconformities,diffractions,and so on. The objectivesof VSP surveys(paraphrasedfrom Gilpatrick and Fouquet,1989)are listed in table l3' l ' Examplesof VSP applicationsto thesevarious objectives can be found in Balch and Lee (1984)and Hardage(1985).Cramer(1988)appliesVSP to the mapping of a point-bar sand and Noble et al. (1988)to resolvingstructuralproblemsin the Vulcan Gas Field'
13.5 Setsmic tomograPhY 13.5.1General "tomos," or "section") Tomography(from the Greek rn.uni t picture of a cross-sectionof an object' In practice, the term denotes determining the internal propertiesof an object from external measurements on rays that passedthrough the object' X-ray tomography has beenusedfor sometime in medicalexamination and in nondestructivetesting.The computerassistedtomography (CAT-scan) technique uses Xrays that have penetrateda body along many raypaths in many directionsand tomographyis usedto,explain the losi in intensity of the X-rays becauseof the absorptivepropertiesof differentparts of the body' Tomographicanalysisusually assumeseither that the propirty being determinedis a continuousfunction of position (transform methods) or that a medium is composed'ofa finite numberof elements,each of which hai a discretevalue of the property' The first method implies a continuous distribution of rays
S E I S M I CT O M O G R A P H Y
493
WELL P 0.5
VSP
SYN
WELL z VSP
ONE MI L E
SYN
ffi
*it,;.,li,,iiijFI? t'ry-qnirrt .tiq._rFf
rh,r ry>k>l+
t t ||
I#:Si']
?.
2. Fig. 13.30 Surlace seismic data with inserted VSP corridor stacks and synthetic seismograms.The match with the corridor
(From at thearrows. stacksis betterthanwith the synthetics H a r d a g1e9, 8 5 : 2 8 3 . ) (hence,an infinite number of rays).Seismictomography,which usesa quite limited numberof rays,clearly is bettersuitedto the secondclassof techniques.However,to introduce some important concepts,we shall first discussintegralmethods.Our discussionfollows closelythat of Stewart( l99l ) exceptfor notation. I 3.5.2 Tomographicconcepts In fig. 13.35a,we show several rays passing from sourcesS, to receiversR, that registervaluesthat depend on someproperty C(x,y) of the medium M. The recordedvaluesare those of the Radon transform of g(x, y) along raypathssuch as R,S, in fig. 13.35b(see also eq. (9.21)). In the following, we use G(d, 0) for the Radon transform (projection) of C(x, y), Gr(u, v) : Gr(p, 0) for the 2-D Fourier transform of g(x, y), G,(p,O) for the l-D Fourier transform of qe, q We wish to find the valuesof g(x,y) usingonly the projections.We start with the Fourier projection theorem,which statesthat the 2-D Fourier transform of the object C@,y) is equal to the l-D transform of the projectionsG(1, 0). The proof is as follows. The 2-D Fourier transform of g(x, y) is (see eq. (9.19))
Fig. 13.31 Loci ofreflection points for VSPs for flat reflectors. (From Balch and Lee, 1984: 82-5.) (a) For an offset VSP, (b) a walkaway VSP, (c) a VSP in a directional well, and (d) a VSP in a directional well where the source moves to stay above the well geophone.
G,(u,v):
fJ
j2'("*'1')dxdJ, (13.8) tO,.,,)e
(note that g(r, l) : 0 outsidethe object,so the infinite
S P E CI A L I Z E D T E C H N I Q U E S
494
OFFSET (Kft) 0.00
0 . 50
r.00
|.60
2.00
2.t0
t . 00
g,
o UJ
;
tr
tr
=
5.0 (b)
(a)
Fig. 13.32 The VSP-to-CRP transtbrm. (Frorn Dillon and T h o m s o n , 1 9 8 4 :t i g s . I I a n d 1 4 . )( a ) I l l u s t r a t i n gt h e c o n c e p to f d i s p l a y i n go f T s e V t S P t r a c e sa l o n g m i d p o i n t l o c i c u r v e ss u c h a s
s h o w n i n l i g . l 3 . 3 l a . ( b ) V S P - t o - C R Pt r a n s l t r r m e dd a t a l i o m a n ofl.setVSP
f- rl- l-
0 + l sin0 c,tr 0) : I ll I r(,t,r) E(-r'cos J _ L J - J -
{ ) d Y d' ll l e ' " ' ' d { . lnterchangingthe order of integration(see5s15.2.31 gives
c,,(p,e) : F i g . 1 3 . 3 3 D i p p i n g r e f l e c t i o n sa l i e r V S P - t o - C R P t r a n s l b r m h a v ec u r v e d a l i g n m e n t s R . e f l e c t i o ni n t e r s e c t i o n w s ith thc downg o i n g d i r e c t w a v c ( 1 . & a n d ( ' ) d o n o t r e q u i r em i g r a t i o n .( F r o m H a r d a g e .1 9 8 5 : 2 1 0 . )
r'pD(r o cos Jli" ,,,[J_. + y sino - e)dl] dx o;, c" o+'sin0)dx dL]' ..v)sr2'otr [f_t-
limits are merelya convenience and the actuallimits are the boundsof the medium M).Replacing (u, r,) with polar coordinates(p, 0), wherer.r: p cos 0, and , : p sin 0, Gr@,r,)becomesG-(p,0): G-t O 0) :
i- f|
|
ft r, f')e
jhp(\ cos0+' sino) d,r d.t'
Thel-D,runr*rl Jt,n. prol...ionin eq.(9.21) is
(becausethe inner integrandis zeroexceptwhen ( : ,r cos 0 * ,r'sin 0). Thus. G , , ( pe.) : G - ( p ,0 ) ,
(13.9)
that is. the 2-D Fburiertransformof g(.t,t') is equal to the l-D Fouriertransformofthe projection. is the mapping from the ((, 0) doBat'kpro.jet'tion main back to the (.r, r) domain; it is approximately equivalentto inversetransformation.Backprojection
495
S E I S M I CT O M O G R A P H Y Table 13.1Objectiveso.f VSP surveys
I
Objective
How achieved
Refleclorrdentification \ Surface-to-borehole correlationI Increased resolutionat depth t
Upgoing wavestudieson zero-offsetVSP
Time depthconversion ) Enhanced v e l o c i t ya n a l y s i s) Log calibrarion t
First-breakstudieson zero-offsetVSP
Multipleidentification \ Deconvolutionoperator t
Downgoing wavestudieson zero-offsetVSP
Improve poor data area
All types,especiallyoffsetVSP
Predict aheadof bit
Upgoing wavestudieson zero-offsetVSP
Structuralimaging
Walkawayor offsetVSP with presurveymodeling
Delineatesalt dome
Proximity surveywith sourceover dome
Seeingabove/belowbit on deviatedwells
Zero-offset.offset,or walkawayVSP Stratigraphic imaging (channels. faults,reeli, pinchouts) Multiple-source locationswith offsetVSP AVO studies Researchstudy on offsetVSP with prcsurveymodeling P/S-wave analvsis \ Polarization studies t Fractureorientation t
Researchstudy on offsetVSP,three-componentphonc
Attenuationanalysi(
Rescarchstudy on zero-offsctVSP
Secondaryrecovery Tomographicstudies Permeability studies
Researchstudy on offsetVSP M u l t i p l cw c l l s m . u l t i p l eo f f s e r s Tube-waveanalysisresearchstudy
Alier Gilpatrickand Fouquet,1989
consistsof summingall projectionsto which a certain property value g(.r,,,r',)has contributed,that rs, we sum the measuredvalues lor all rays that passed through the point (.r,,-l',).This operationcan be expressedby an integral, the backprojectionl(.r, 1') being
: ir(.r, 1'y
J"
: J,
",r, o,oo "r coso r -r'sino,g)do,
(r3.r0)
w h e r eG ( ( , 0 ) i s g i v e nb y e q . ( 9 . 2 1 ) . Althougheq.( 13.l0) doesnot reproducethe object, that is, i(,r, ,r') is not equal to g(.r.,r'),it does give an approximatepictureof g(r, 1').By usinga ratherloose analogy.just as a seismicreflectionappearsas a ringy embeddedwaveletratherthan as a spike,the backprojection is a blurredimage,and we can sharpenthe imageby deconvolution(filtering).We obtain g(,x,1,)exactly by transformingthe projections,filtering,and then takingthe backprojection. To showthis.we start with the inverse2-D Fourier transform of G..(u,r') (see e q .( 1 3 . 8 ) ) :
ATr
TIM[+ ATt
x !J
F (L U
l
v
I
F i g . 1 3 . 3 4 S t r e t c h i n gt h e V S P t i m e s c a l et o g e t c o n s i s t e n t i m e i n c r e m c n t sb e t w e e nt r a c e ss t r a i g h t e n sa l i g n m e n t s .
i.t
. s ( . \ r- . ): |
l.''
l 1 . 1 s , , ' ',,",d' r d r : | G..{r,
J - J .
(p. 0). we have Changingto polar coordinates g(-r, .lr,l :
fi
G_(p,e)e,r""pdp d0, ( l3.l I )
S P E C I A L IZ E D T E C H N I Q U E S
496
R3
R4
R1
R1
R2
R2
(a)
(b)
F i g . 1 3 . 3 5 T o m o g r a p h i cc o n c e p t s .( a ) R a y p a t h sf r o m v a r l o u s s o u r c e st o v a r i o u sr e c e i v e r ssl o l u t i o n c a n b c o b t a i n e d i f e n o u g h
raypaths penetrate the medium in all directions. (b) 1n practice a grid of uniform cells are usually assumed.
wherewe have usedthe relations{ : "xcos 0 * .1'sin "area" : dp(pd0). We wish to 0, and that dy d,y : changethe limits of the integrals;recallthat replacing 0 with 0 * n changesthe signsof cos 0, sin 0, and (, g) - l( p, 0 + t). and that in polar coordinates,.f(p, W e n o w s e p a r a t et h e 0 i n t e g r a li n e q . ( l 3 . l l ) i n t o parts;thus,
| -D Fourier transform of the projections.Moreover,
t r i.-
dp de s(.Y. l') : I I G"(e.0)er:",',p J,,J,, fr" l.
-
ndpo . | | c _ ( e . g 1 s , :d" p J" J., Thelowerintegralis equalto
-J,lo'-
0+T)e+r' "p,pdp d0
:II
dp d0, G,(-p, 0+rr)e i:'r',lpl
because-p : lpl when p is negative.Therefore,eq ( 1 3 . 1 l )c a nb e w r i t t e n tf
f -
l
l
st.r,ut : | | G"(p.0)o' *'lpldPd0. ,ltt ,l
s(x,-y):
ulot, J"",tr,
(13.12)
so that g(.r,l) is obtainedby the backprojectionof the Fourier-transformedfi ltered projections. 13.5.3Solution.fbru limitetl nunrbero.fdixrate cells We divide the medium M into m cellsor pixelsand assume17rayspassingthrough M (fi9. 13.35b).Each pixel has a property value g(.t, 1') and the recorded value at R, is a projectionequal to the sum of the productsr{g,, wherer{ is the path length of the ith ra1 in thejth cell.Assumingthe usualcasewhere8, is the we write for the traveltime slowness. t ' : t l i g , + r t ' t g t + ' ' ' + r t , , s , :, 2 d ' ,g , , (13.13) i:1.2.....n. Of course.any givenray will not passthroughall cells so that many of the r{ are zero. If we measureamplitude insteadof traveltime,we can take the logarithm o f e q . ( 2 . 1 1 0 )a,n d e q .( 1 3 . 1 3b) e c o m e s
\n(A;tA'):Lair,
(13.14;
-
o r b y e q .( 1 3 . 9 ) ,
: o)d"o;o1ar]ae. s(r,.v) [[l_o,The inner integral,which we shall denoteby Gr,(f, 0), is a filtered version of C,(p, 0), which in turn is the
Equation(13.14)can be written in matrix form as T : %9,
(13.15)
whereI is a n X ,fl matrix relating column matrices T and 9. Given 9, we wish to find L This is onll possibleif we know 9, at least approximately.When 3 is known exactlyand n : ,?1,an exact solution can
SEISMICTOMOGRAPHY be obtained.However,the important caseis when the number of raypathsexceedsthe number of cells (r > m) and I is known only approximately;in this situation, a numberof solutionmethodsare available(Herman, 1980).A least-squares solutionis possiblebut is time-consuming.Stewart(1991: 2-21, 2-28) describes a solution basedon backprojectionthat givesan approximateresult.More suitablesolutionsare siven bv the algebraicreconstructiontechnique(ARTJand simultaneousreconstructiontechnique(SIRT) or one of the methodsdescribedby Justiceet al. (1992). The basicproblem is to solvea setof n linear equations with n unknowns(n > m), where the m \ n coefficientsare known only approximately.ART starts by guessingvaluesof the parametersgj and usesthese valuesto calculatet1. The differences"between calculated and observedvaluesof t2 are usedto vary the g, so as to minimize the error (difference).The adjusted valuesof q are used in the secondequation and another adjustmentof g, is made.The processis continued until all ofthe equationshavebeenusedand then the entire processis iterated.Stewart ,1991:2- 2g to 2 34)givesfurtherdetails;seealsoGordon (1983)and Herman, Lent, and Rowland (1913\. In using ART, the adjusted parametersobtained from one equation are used in the next eouation. In S I R T ( S t e w a r t 1, 9 9 1 . . 2 - 3t4o 2 3 6 ; D i n e sa n d L y t l e , 1979),the errors are calCulatedfor all equationsusins the first guess,and the average..ro., ui. usedto ad] just the parametersfor a secondpassthrough the set of equations. I 3.5.4 Cross-hole measurements Unlike well-loggingand VSP measurementsthat involve a single borehole, cross-holestudies involve sources and detectors in different boreholes (fig. 13.36).Usually,severalreceiverlocationsin one borehole recorddata from a number of sourcelocationsin another borehole,and sometimesrecording is done on the surfaceat the sametime. The recordingprocedure is time-consumingbecauseusually only one or a very few receiverand source locations can be occupied at a time, but developmentsare underwayto permit the simultaneoususe of severalreceiversand to increasethe sourceenergy.The objectiveofcross-hole studiesis to learn about the region betweenthe boreholes(Wonget al., 1987;Rutledge,1989;Lines,l99l). Nearby boreholesare most often availablein developing and producing oil fields, so cross-holestudies usually havereservoirgeophysicsobjectives. Tomography is usually employed in interpreting cross-holedata. Both slowness(l/velocity) and absorption satisfythe requirementsfor tomographicimage reconstruction(Deans, 1983).In theory. we can measureboth traveltimeand attenuationand solvefor the unknown velocity field and absorption distribu_ tion (Q-map)in the interveningregion. However,usually, we try only to determinethe velocity distribution in the interveningregion from measurementsof seis-
497 mic traveltimesbecauseamplitudescannot be measured with sufficientaccuracyto determine absorption. Most applications to date use only the firstarrival information in their solutions. The often-madeanalogybetweenseismictomography and CAT-scanningshould take into account that in a CAT-scan,the X-rays travel in straight lines in many directions,whereasin seismictomography,the different directionsraypathscan take are limited and the raypathsare not straight (fig. 13.36b). Although generallythe number of observationsis much largerthan the number of cellsand the problem is overdetermined,somecellsmay not have been traversed.so that their slownesses cannot be determined and many of the travel paths may have traversedthe samesubsetof cells so that their individual contributions cannot be separated.All measurementsinvolve uncertainty,and the reliability of a determinationdepends on the number and range of directions of the raypathstraversinga cell. In CAT-scanning,we can haveraypathstraversingthe body in many directions, but seismicapplicationsare constrainedby the boreholes availablefor measurement.Also, the zone of major interest is often near the bottom of the boreholes,so that only nearly horizontal travel is possible for raypathsin this zone. The seismicproblem is unlike the CAT-scanproblem in another very important regard: Seismicraypaths bend (fig. 13.36b)appreciablyas the velocity changes.This makes the seismicproblem nonlinear becausea changein the slownessof any cell changes not only the traveltime,but also the raypath.Forward modeling to recompute the traveltimesthrough the modified model has to be carried out anew for each ofthe variousraypathsbeforeeachiteration ofthe tomographicalgorithm. Many ray-tracingmethodsare not suitablefor forward modeling becauseSnell'slaw does not apply at the cell boundaries,which exist only as a mathematical device and do not correspondwith actual interfaces(that is, they have arbitrary rather than natural orientations).Figure 13.37aillustratesthis problem; rays only incrementallydifferent can strike near the corner of a cell where the velocity contrast is large. The ray that strikes the upper boundary first will be bent in an entirely differentdirection from that of the ray that strikesthe side boundary first, and hencethe corner will producea major discontinuitywith no raypaths at all entering a fairly large region unless diffraction is taken into account. To accuratelyaccount for the actual observedarrivals, the forwardmodeling algorithm must include arrivals that result from diffraction and critical refraction.The procedure of Justice et al. (1992) involves computing the full acoustic wavefield at closely spaced increments in time, thus allowing for diffraction, and then tracing rays along orthogonaltrajectoriesbackward(in time) through the wavefronts to find the minimum-time ray connectinga sourceto a receiver. The tomographic solution is almost always itera-
lV!ll
-1i-
ro. 2
Tfansilla? Ldtbna
(d)
(a)
L CO18
LAco 26
L A C Q1 8
LAco 26
zs?
377 a3? a17 521 55? 58? 6l? 647 671 1a1
?95
(b)
F i g . 1 3 . 3 6 C r o s s - b o r e h o l em e t h o d s ( a ) S o u r c e s a n d g e o phones in nearby boreholes provide criss-crossingraypaths (b) in an actual situation, raypaths bend and concentrate in high-
(c)
(c) Velocity vclocity cells. leaving rnany cells poorly sampled(b) (from Bois +(Yri+\ (r517) h,h-h,'Au,\h, au,l 15.1.3Matrix analysis (a) Definitions. A matrix is a rectangular array of numbersa,, arrangedin r rows and s columns;an entire matrix is here indicatedby script type:
520
BACKGROUND MATHEMATICS
,:11,,' :;,,,ll llo"o" o'' ll
(ls.l8)
The orderof a matrix is r X s. If r : I, we havea row matrix; if s : I , a columnmatrix; theseare also called vectorsof thefirst and secondkinds, respectively.A null matrix t has zerosfor all elements.The transposeof a matrix has rows and columns interchanged;thus,
dtt d:t '.' t r
-
i l r- l o4o- 2, tI l l
ll ll ..r o l l :ll" ./ ' : l l t 2| -' oll ll' ll,
ll
at: a:: ar: ...Il
at,d:,r,,
.4 ism x n and thatof ,t9 isnx p, theorder of 6 is m x p.When more than two matricesare multiplied, products can be formed in pairs; thus, . I '/9't : (, A.8)6 -- .'Z (.-196). The transposeof a product is the product of the transposesof the individual ma: ./tr,'l'r tricesin inverseorder,that is, (,'l',8)' (seeproblem 15.10b). It is sometimesconvenientto partition a matrix, that is, to representit as a matrix whoseelementsare submatricesof the original matrix. For example,
(l5l9t
: : , lll l
A matrix of order r X r is a squarematrix. The printipal diagonalof a squarematrix has the elementsa,,.A diagonalmatrix is a squarematrix with zeros for all elementsthat are not on the principaldiagonal,that is, a,, -- 0 if i + j, and at least one of the a,, t 0. An identitymatrix .V is a diagonalmatrix wherea,,: I for all i. A matrix with zerosbelow (above)the principal diagonal is called an upper (lower) triangularmatrix. A ,symmetric matix equalsits transpose,that is, , I : , lr, and a skeu,-symmetit'matrix equalsthe negative of its transpose,. I : -. I r. A symmetric matrix where all the elementsalong any diagonal parallel to the principal diagonal are the same is a Toeplitz matrix. The colactorof an elementa,. of a squarematrix is (- lft' timesthe determinantformed by deletingthe rth row and the ,rth column. The adjoint of a square matrix, adj(. I ), is the transposeof the matrix . I with eachelementreplacedby its cofactor.The determinant of a ,square matrix, det(. I ), is a singlenumber given by det(. I ) = L, a*A r : 2r a,rA, wherelu is the cofactor of a,*.The inverseof a squarematrix can be found by dividing the adjoint by the determinant [if de(. I ) + 0], that is, . 'l | : [/det(, I )ladj( /),. /-t. I : ,V (15.20) (seeproblem 15.2b). (b) Matrix operations. Operations performed on matrices change the values of the matrix elements. Corresponding elementscan be added,that is, if { : , 1, + ,.8 , c,, : a,, * b,.;matricesmust be of the same order to be added.Matrices can be multiplied by scalars,that is,if U : k, 1',d,,: ka,,.In matrixmultiplication, the ith row of the first matrix is multiplied element by element by the jth column of the second matrix and the products are summedto give the yth elementof the product matrix, that is, if 5 : . l./9 , e,,:Lre,rbo,. The first matrix must havethe samenumber of columnsas the secondmatrix has rows for matricesto be multiplied. ln 5 : . l.B , if the order of
ll'ololl
where
;iil ": l i-2' o' l,lll o : -'*ll' 0Oil
il,
.n : ll0 o r l l , . / : l l I 0 l l To add , 'l to a similar 4 x 5 matrix .'4, 'A must be partitioned in the sameway,that is,
ull /) : l l . r v/ llv ll' where.Vis3 x 3. lt is 3 x 2, and so on. Then
l l. r * . 7 Q - / / l lr l ./ +., =ll rn -V .'t+7t'll When partitioning matricesthat are to be multiplied, the submatricesmust be comformable.Thus, if '6 :. /.'8. w h e r e . I i s m x n , , . t i i s n x p , w e c a np a r t i t i o n . I and.tl as follows:
, : ,l lt l " = l l ; 1 , 1
' f b e i n g a x bU; , a \ c ' ; 5 , d x b ; . 7 , d x t : ;! ( , 6 x i ; , i l . b x k ; 7 , r ' x j , . V / , c x k ; a + d : m ,b *c:n,j+k:p,then
' ' : l ll lrr ': tt ++.vu 77
't.7i + q.vlll ;t .vl + .v.v/ ll
Matrices can be used to solve simultaneousequations. lf we write a set of linear equationsas atit
+ er.x, I aBx3+ "' :
a"rx, * errx, I ar.x. I
-t "'
-
at:xz t
41.x3
antXr t
anzxz t
Q,txz t
attxt
"' : :
(15.211
SUMMARIES OF BASIC CONCEPTS
521
and let , 4 be the elementsa,,,JL- be a column matrix with elementsx,r : x,, '6 be a column matrix with elementsc,.then we can write
0",(0) 0",(+l) +"0G,!) 0
.4,X:' 6 and solve for ,I':
0 . r ' t .l . ! , ' : , y ' - t { , .r' : .4-t6 b e c a u s e, l , t , i
I (15.22) : .v.l ) This solution requiresthat, 4 be a squarematrix and that the equationsare independent,that is, det(.'t) * 0 (seeproblem 15.1b). Convolution, e, * b, : c,, can be performedby the : '6 if ,4 is a matrix of the form operation,4,8 indicated in eq. (15.23) and ./9 and 5 are column matrices.For simplicity,we assumethat a, and 6, both haven * I data points, zerosbeing added to achieve this. Then, 0 "'
ao 0
0
:
:
:
'
.
.
Q , a , t 0
a
,
a
l
ll*ll_ ll,.ll ,:,
Lr+
".an
0
ll'i' " tl
"' ll"' €r €, € o - .€. .t llo
#*(-n) ;
l|;lt 0",(- l) 0"r(0) 0"r(+l)
( 1s.25)
Q"uftn)
Autocorrelationis given by
I
(ts.26)
6uu: UrU.
, ( l 5.23)
:
0
"' o ll". o o,
cl
0 Q o
This gives the same values as eq. (9.42). The crosscorrelation matrix is a Toeplitz matrix. Another schemefor cross-correlating e, with d, is given by
llo o '.'"u
co
a t a o 0 " ' 0
(ts.24)
The autocorrelationis also a Toeplitzmatrix. The Wienerfilter normal equations,eq. (9.73),can be expressedin matrix form as
vl"
(ts.27l w h e r er ' ,: L r a , o b r : Z o a r b - ^ .T h u s ,e q .( 1 5 . 2 3g) i v e s the sameresultas eq. (9.23).Note that matrix. I is o f o r d e rp x ( n + l ) , w h e r ep : 2 n + l . Cross-correlationcan be written as i4 rU : $",,, that is.
eo et
0
0 e"
e,,
€o €t
0 0
where
0""=
0 u
eo 0 r u
v:
en €n-r
ll:: -":lll:l?11; il1il ,
(ts.29)
llo-,t,1 ll
The filter .7 is givenby
o " o
.v: do 0 dt do
0
0
0
' d l
0 do o
d, 0
d
,
d
d,,
o ,
d,,l
J
(1 5 . 2 8 )
0
6;"'610.
( 15.30)
Sometimes,the solution of a matrix equation rnvolvesthe inversionof a matrix that is not square,as in.'l.B:6,where. / isofsizemXn,,B of size n x p, and t of size m x p. To solve for .B , we multiply by . .l', . 1,r,.1 .4 :.
/,r{
(note that , l'r. .l is alwayssquare),then multiply by (. l'. l) | to get..4: ../):(. lr.'l)-t. lr' {.
(15.31)
BACKGROUND MATHEMATICS
s22 (c) Characteristic equation of a matrix; eigenvalues. On replacingc, with /i, we can write eq. (15.21) in matrix form as
, ' a . r:' a
(1 5 . 3 2 )
Column matrices .,5- and '/ are vectorsof the second a linear transformakind, and eq. (15.32)represents tion of veclor .-l' into vectolq .If U : \,Jf,', \ beinga constant,1/ is saidto be in the samedirection as .,{'. The condition for this is that
.1,-{.:a:},.t. or
( . . r- | \ . v ) . t ' : ( . arrxr* "' I
-t (azz - ^]]' *
"*"
a,,x. + "' + (a,,-\)x,
anit +
100,. :
0.
( r5 . 3 3 ) Theseequationshave one or more solutionsif and only if the determinant of the coefficientsvanishes ( $ 1 5 . 1 . 1E ) .x p a n d i n gt h e d e t e r m i n a n tw, e g e t a n n t h order equation in \ of the form
x "- 9 , \ ,' * g . t r ,-:. . . + ( - l r p " : 0 .
Maclaurin'sseriescan be used to derive many useful infinite series.For example,rf "f(x) : e', then/'(0) : | : f"(0) /"(0), so e ' : I + x l l t + x 2 l 2 !+ x 3 l 3 t+ " ' . ( 1 5 . 3 7 ) cos .rr, (d' ldx' ) Similarly, since (d/dx)(sin x) ( s i nx ) : - s i n x , a n d s o o n , / ( 0 ) : 0 : .f"(0): "', f' (0) : +l, f"'(10): -l, . . . ; therefore, f"(Ol : (15.38) t x 5 l 5 !- x 1 l 7 t+ . . . . sinx : x - x3l3+ (15.39)
(c) Binomial series. The binomial seriesis obtained by the expansionof the function (a + b)'. We can write this in the form a'(l * x)", wherex: bla. Let lal > 16lso that lxl < l, then we can expand(l + .r)'in a seriesthat is finite ifn is a positiveintegerbut is otherwise infinite. Writing/(x) : (1 + "r)', we have ' 1 . = :u n , f'tO1: n(l + x)'' , f ( 0 ): I , -- n(n - l), and so on, .f"(x) so that
(15.34)
This is the characteristicequationof matrix . 1, and its roots are called the characteristicroots (values)or eigenvaluesof , 'l . Becausethe determinant of the coeflicientsin eq. ( 1 5 . 3 3v) a n i s h ew s h e n e v e\r i s a r o o t o f e q . ( 1 5 . 3 4 )i,f a root happensto be zero,the determinantreducesto det(.I ) so that det(.I ) : 0. In this case,eq. (15.20) showsthat . I ' is infinite(doesnot exist).
l . x 1= t + n x + +
n(n ' l'l , ., .r-+"'
n ( n - l ) \ n - 2 ) " ' ( n -r + l ) x'+ "'. (15.40) yl.
This seriesis valid for all finite values of n (Wylie. 1966: 695). The binomialseriesis usedfrequentlyto obtain approximations,especiallyof the following functions: l l l ( l + . Y ) r ' r :| + - r - . . r t+ - - . Y-l " ' . ( 1 5 . 4 1 ) 2 8 16
I 5.1.4 Seriesexpansion,s (a) Taylor's series. Taylor's series is discussedin most advancedmathematicstexts,for example,Potter and Goldberg(1987:84)and Pipesand Harvill (1970: 34l 3). The seriesenablesus to find the changein/(x) when x changesby ft in terms of powersof ft and the derivativesoflr). The seriescan be written .f(r + h) :/(r)
(15.36)
ar,x,: 0,
. ]
. . .:':'
"f(x): l0) + x/'(0) + (x' l2l)f'(O)+ "' + (x'lnl)f(0) + "'.
In the sameway, c o sn : | - x 2 l 2 t+ x a l 4 l- x 6 l 6 !+ " ' .
equations: This is equivalentto n homogeneous (a,,-\)x, *
placeh with x in eq. (15.35),we get
+ hf'(x) + (h' l2r.)f'(x)
+ . . . + f h ' - t l ( n- r ) l l J ' ' ( x ) + R ( € ) ,
(1 5 . 3 s )
wheref'(x), f'(x), . . . ,-f' '(x) are derivativesof orders 1 , 2 , .. . , n - l , t : k h ,w h e r e 0< k < l , a n dR ( { ): (h'lnl)fG) : remainderafter n terms.Obviously,R({) is the error when we truncate the seriesafter r terms; hence,the error is of the order of ft'. The larger /r, the more terms we require to achievea given accuracy.In practice,two or three terms are usually sufficient. (b) Maclaurin'sseries. If we set,t : 0 and then re-
1 3 5 (l + v) rir: | - ^t - lx'- '"r'- "" (15'42) 2 8 16 (15.43) (l + x) t: I -,t *.x: - tr * "', ( l + . r ) : : I - 2 - r* 3 x 2- 4 , r r+ " ' . ( 1 5 . 4 4 ) 15.1.5Complernumbers The squareroots of negativenumbers are imaginar.t numbers,and numbersthat are partly real and partl] imaginary arecomplexnumbers.If we write j : { Ithat is, j' : - I (somewriters usei insteadof i), rie can write, for example, the imaginary number
rl-s:{t{-r:3j. A complexnumber,z : (1+ jb, can be represented by plotting in the complexplane where the direction of imaginarynumbersis at right anglesto the real direction,as in fig. 15.2.We can also expresscompler n u m b e r si n p o l a rf o r m : ::
a+j6:
r ( c o s 0+ j s i n0 ) : 1 s t o
(l5.4it
SUMMARIES OF BASIC CONCEPTS - modulus (seeproblem 15.l2a),wherer : (a2* b2.)t/2 of z : lzl and 0 : tan t(bla) : arg(z).The conjugate complexof ;, :-, is definedas Z : a - jb = rlcos e-- j sin 0; : re jo(seefig. 15.2). The sum (or difference)of complexnumbersis ob_ tained by adding (or subtracting)the real and imagr_ nary parts.lf z,: a -t jb, z.: c + jd, then(:, t ,.) : (a t 4 + j(b -+ d). A complex number is zero oniy if both its real and imaginaryparts are zero;hence,rwo complexnumbersare equal only if both their real and lmaglnaryparts are equal.Multiplication and division obey the usual algebraicrules. For example(seealso p r o b l e mI 5 . l 2 b ) ,
:i. = (a+ jhtrc+ jd) :(uc-hdlLj(atl-bcy : r , r , [ c o s ( g+, 0 , )+ j s i n ( o + , 0.)] :1",1,9j{ot*o:).
_t_ :u
I I
(15'46)
f )
+ jh _ {u+ jbtg.- jd) (c+ jd(c- jd1 c.Jd
:(qc+bd)+j(bc-ad) c 1+ d : (r,/r,)[cos (0, - 0.) + j sin(0,- 0,)] o:r. : (r,/r,)eit{}r
BecauseE is a function of the parametersa* only, the minimum is given by dE 6ar
2\(/-,
- cto-
alxi
... -o,,*,)(-rf)
: o,
- T ri + a , \ x f * t + . . . + o , , ) * f - , ": I r f r , , k:0,1,2,...,m.
(15.50)
There are m * | such normal equations,so we can solvefor the m * I unknowns,a,. Sometimeswe wish to find a least-squares solution subjectto a certainconditionon the unknownDarameters(constraint ), for example,we could require that at: eqand/or a, I a, + at 0. We can write each constraintin the form C(a,,ar, . . . , a,,) : 0. Because the a,'sare chosenso that |Eli)a : 0 (and OCl\a : 0), we can write the least-squares conditionwith con_ straintsin the form A
+ \C;:9, al,o,(E
( ts . 4 7 )
The rth root of :, ;0, can be found by writing : : rero- .i: (r,,e,nu;, [r,,(cos0,, + j sin 0,,)],, : rfi(cosn8,,I j sin r0,,) by de Moivre'stheorem(seeproblem l5.l2a). Hence. :"" : zt : r,,(cos0,,* j sin 0,,), r,,: r"n, 0,,: (0 + 2nk)ln, k : 0 , 1 , 2 , 3 ., . . n - t .
s23
i:0,
l, ...,m,
(15.51)
\ havingthe samesignificancehereas in the Lagrange methodof undeterminedmultipliers(pipesand Hu.vill, 1970:968).Thesem * l equationsand the equa_ tron C(a,,a., , a,,,): 0 sufficeto solve for L and
€ 'a
(1 s . 4 8 )
Figure 15.3showsroots plottedin polar form for the casewhere: : r : rei2.: real.n : 5 and6.
I 5.I .6 MethodoJ'leastsquares ( a) Basicmethod. Let us assumethat we wish to ob_ tain the "best-fit" curve of orderm, l i = a o* a l , i
a . x i + . . . t a , , , r , (, ,1' 5 . 4 9 )
to representa setof r pairs of measuredvalues(-ru -y,). If n : m + l, the curvewill passthroughall r points, (x,,,t,).If n > m + l, the curvewill not passthrough all n points and we seekthe ',best-fit"curve such that the sum of the squaresof the ,,errors" betweenthe curveand eachpoint (.r,,1,) is a minimum,the errors e, being the differencesbetweenthe measuredvalues 1, and thosegivenby the curve.Thus,
Fig. 15.2 Geometrical representationof complex numbers.
€ i : ! , - ( a u* a r r * . . . I a , , , x ' , , , ) , i:1,2,3,...,n, and we wish to minimize E. where .i : ) , | y , - ( a , , t a ) x i+ . . . + a , , , x ' i , ) l r . E: 1,ei i:i i
Fig. 15.3 Roots of a complex number.
524
BACKGROUND MATHEMATI CS
the m * I valuesof a,. The extensionto severalconstraintsinvolvessolving
This can be partitioned thus:
,-u,illl ;ll=,:"ll;ll
! ( t * } , c \'l : o d./,\ 7'
Equation(15.50)can be written in matrix form as
'f
: .)t'*' l*'
(1 s . 5 2 )
where
rl"l l'il ,, ll e,:il,,"illl,, :il-,y,",, "-,'||ll
Tr,', !.''*r .,{'+
il ll il",-llll,-ll
:
-''il il; ll ll -, = .. "; llI d,--.o)lll llll : il. ,""ll" ", ,,,ll","llll","l and
! "r"'
,|[|I ' r:
Then,
, 1 )
s-,,
L'' ,.' '
_, /il ll
!r',,1,
Because..{,'* is square,
. -l* : (.I*) ,a*
where the first column of ..8 is - :/, and the rest is .I) We can accommodatethis by taking the first column as the Othcolumn, that is, b,, : - ! , and bu : xu, i>0. Individual errors are given by
(1 s . 5 3 )
:llI tt , t(il E:fe; ;,,ll
x'-v,Y")ll
problem usingmatrices If we solvethe least-squares from the beginning,we can obtain a more generalresult that is alsowell adaptedto computercalculations. We write eq. (15.49)in the form
/ll,,,,ll
.rt;.: a,
:ilr /,|.nll ;ll
where
Yr: '''-ll lllx,, l .Y..... x,, ll lllo, l ' lll l lllll,' ' l l / ' : l l : : , l l . , r =, ll ll . a =, llll il ll ll*",*.,...x,,,, ll
i ,,,, lil ll ll
il ll llr, ll
xi,, /, being known, rz,unknown, and n ) m. (In general, x, can be any m x n known quantities,including powersof x, as in eq. (15.49). Becausewe have more equationsthan unknowns, the equationscannot hold exactly; writing I as the c o l u m nm a t r i xo f t h e e r r o r se , ,i : 1 , 2 , . . . , n , w e obtain
, t ;t - u : r .
,r?,:.,ll 1tl
t,,,,ll: ./?r'8.
(15.54)
Setting derivativesof C with respectto a, equal to zero gives
fo:o:llo..oro oll./?. 0
This can be simplified by writing (Claerbout, 1976:
r07)
lll:,,.,,,llllj lflI
+l1 l i
t' ll ' ' ' 2
0 I 0 0
SUMMARIES OF BASIC CONCEPTS
il ll/ 1 tl ll
: -rll r r 0... " o | 0..'oll.,? 1t 2a,
525 do this by multiplying the error e, and the ith row of ..r')by a weightingfactor {u',. Then,
because.4 : ..4r.8 is symmetrical.This resultcan be written
ll't
l l r l l ',,,, llll -- ll = o.
r = r. 2 , 3 , . . . m .
"ll.
\
.x, , y ,., \ - ,, l,ll l l l l l : t I . / ' l l . / ?-ll ll -l -l ,l ll-,r, l l l /. l l l l / llll . lll. ll ll I
ll'lll
If we combine the m equations,we get
:/ lll: , "ll ll l
(15.58)
except that we lack the Oth row of 'y'|. We define a quantity u by the relation
= r,,,' ro,,llll 11r,,, ; il v ;
(I 5.55)
we now have
llJll o'",, ,l 4lt'l:l[[[[[[ ll: l; ll ll'll
:tl;.,,llll u t't tt11 :tl- ) , / / , . )l l l l " ) - /y''ll
E : \ n ' , c i : lt l . / ' l l >
ll I
where.l?,* is the weightedform of .4 : ..r']t.4, that is, the product of ..r']r and./]when the ith row of ./] and the ith column of .4 | are multiplied by {u',. Equation(15.57)is still valid exceptthat the ith row of .l'and '/y'andtheith columnof .11 aremultiplied by {n',. Constraintscan be consideredas additionalequaexactly, tionsin the unknownsa, that must be satisfied that is, they have infinite weightsin comparisonwith the error equations.We can write k linear constraint equations,k < m, in the form
: (' .
(15.59)
(l 5 . 5 6 ) where
/y',//-r/, / llll I
r :
that is,
llvll
l | l lrl' :'u | /+- .1,'r.1," 'U/' ' t "Il llll
F b l l o w i n gC l a e r b o u t( 1 9 1 6 :I l 2 l 3 ) . w e a s s i g nt h e weight {l' to each constraintequation,insert the weightedleft-hand side of eq. (15.59)in the error equations.derivethe result,and then let l approach infinity. Without constraints,we had the result (seeeqs. ( 1 5 . 5 4a) n d ( 1 5 . 5 6 ) ) .
ll'll Thus. we have
v : '/y'' '// - /y''.2'. t ' and
ll:ll ll,ll hence, . I : ('l'r'1,) '.)r'''2/.
il'll1ll ,rll,illl:ll
' ll lll ; (15.57)
At timeswe wish to giveextra weightto one or (-r',,-x,,,-r,:,. . , -r,,,,). moresetsof observations Wecan
ll -r', -',,
t , , , )
B A CK G R O U N D M A T H E M A T I C S
s26
Equations(15.59)and (15.62),which give the solutions for the nr unknowns a, and the k unknowns \,, can be combinedin the form
with constraints,this becomes
['il:
ll -r, -t,,
\
t,,,"1 I
.r'([1
l lo ' n/ I * / ' / l l )]
llr
iltlll
"ll-
t15.60t
llt that is.
(../)r., +
i l ,=ll, l t l=7* l;.ll 1s/'/ ll,ll ll
We write
, l l - r :l . tlt + e ' / ' f lr':', ll
"
ll
+x:'1'!+"'
lil l ' /tll l
where . lif is the matrix that gives the desiredsolution, . 1,f is a similar matrix with different unknowns' and so on. Substituting,we get
"'):
V*
e t'.'{r'6,l'tr : a lt + 6r{.'/rl: xo'.,/9r./9, Because
r**
Y^*l*)
: : r - L x , x r , _ Z Y , Y r, , the sumsbeingoverall appropriatevaluesof i' Squaring E, gives
-E^):
: ] - ( t . " . r ,) ( I r ' , \7''' 1\7
V*'
]
, , ,u , ,
,)
+2(Ix,r- ,)(l r'-.,) Summtng over the full range of k gives the total squarederror:
' 1i:"ll ;ll:'
from eq. (15.59),the first equationis satisfiedautomatically; hence,it provides no new information' In 't : ''/,whete the secondequation,we substitute /f / is a k x I matrix whose elementsare the equivalents of Lagrangianundeterminedmultipliers'Then
lt + '{1'/' -- Vx. ..r']r..4,
,t)
+(I r,r-,)(;,r'- ,) - z r r ( \ x , r ^ ,* I t r -
Equatingpowersof e gives
( I 5.63)
(b) Multitraceleastsquates. ln $9'5'5and 15'l'6a' filtering of a single trace' we discussedleast-squares Extensionto multitracesituationsinvolvesconsiderably more complexmathematics,so we shall consider the caseof two tracesfirst and then discussgeneralization to ,?traces.Our treatmentis basedlargely on that of Schneideret al. ( l964)' but we havesimplified their notation; to do so, we have departedliom our usualnotatlon. We considertwo tracesx, and y,, which are inputs * to two filters X, and I,. The filter outputs are X, x, close be as output each that and Y, * y,, and we require as possibleto a singledesiredoutput' We write z, for the sum of the desired outputs; hence, the error at t i m e I : k i s ( s e ee q . ( 9 . 2 3 ) ) Er:ir-(X^*
(.r,,,+1'r''t) 0, or r < 0 (Weast,"l975, integral 621);hence,the right sideequalssgn(l).Thus, s t e p f t ) : [ + s g n ( r ) ] / 2 e n 6 ( r , r ) +l / j c o ( l 5 . l 2 l ) (using the transform pair I If g(r) is also causal(see$15.5'6),C"Q) g.(t) for I -C.(l) for I < 0, that is' 0 and g.(l) : c"(l) : g.(r) sgn(t)' g"(r) : s"(t) sgn(/) t h a t s g n ( r I' Thus,changingthe limits to +- would not changethe value of the integral. The convolution theorem, eq. (15.195),can be proved as follows: I "dr' sJlls2l- r)dtle 1 | Jo "lo f-rl'
f-rf. I "dr' - r)drle - r)step(r .tl 1l g,(r)s2(I tJ" J"
t - a,
: .-"'Jsfr)" "'d.v: e "'qs).
wherethe changeof the upper limit and the insertion of step(t - t) have not changedthe value of the integral becausestep(f- r) is unity for r ( / and zero for t > L Changingthe order of integrationgives
r-
b y p a r t s .g e t t i n g F o r e q .( l 5 . l 9 l ) . w e i n t e g r a t e
o.t "l- - ,-r,|.-r(I)e.,d/. = g(r)e * l?.t. ,161 " dr J,,dr J,, I -c(0+) : + sG(s). By successiveapplicationsof this result, the general formulais obtained.For eq. (15.192),we write G(s): Jlg(r)e "dl, and then differentiatewith respectto s', giving
t't"'' "o' s{r)j,te";dt: J,,tI
d :G i - a
::
and hence -tg(t) dG(s)/ds.Successivedifferentia)' ewrite ) .o p r o v ee q .( 1 5 . 1 9 3 w t i o n sg i v ee q .( 1 5 . 1 9 2 T 1,,g(t) dt e->G,(s),then differentiate,obtaining s(t) sG,(s):G(s);hence,G,(s): (lis)G(r). The conversets proved by writing f-
f-rf" d rr f IJ . c o t o . ' J= |. lLlJrNr ( r ) e J d s . l-
rf*
I
: I g t r rI le " a s l o r ' ) tJ' Jn
on changingthe order of integration'Then i'-
f-
J.
J,,-
^r,,-
f-/r\
"dr: I c 6 ) 0 . ' =| g ( r-)1"rI,a t : I l l l s ( r ) e J,,\1/
hence,(l/r)g(r) n). If we let q : e r2'h, then 2 = s irtzrtnt : q,. The various values of G(), G,, can be written in matrix form
c. llG,
ll
ll I
l
-- illlr ;
q'
ll":
ll'
q
l q
2 qo
il'
llo l l '
ntn 1
(cos0l + j sin 0/) step(r)
cos ur steD(I)e
Amplitude
t-..12-j4..la
Aaa
: - nL); g(t) : e('step(,r) ie*"^a (t ' J ' ; : et'step(/) e+ )er'r:'
Qz)
t)
n2\n q
tt
TIilI il (ts.2t9)
This method requires12 multiplicationsand n2 addi_ tions. Becausea seismictrace often has a few thou_ sand values, millions of calculationsare necessary. The fast Fourier transform (FFT) is an ingeniousal_ gorithm for calculatingG(z)with only n logrn calcula_ tions. For n - 2to : 1024,the difference'i, b",*."n lOaand2x106. The fast Fourier transform (Cooley and Tukey, 1965)dependsupon doublingprocesses ty which a se_
BACKGROUND MATHEMATICS
550 ries is built up from (or decomposedinto) shorter series. Let us take the time series C1:Co,CpC2,..
tCzn,t'
C(z): co I crz * crz2+ "' * ct, ,z2n-t,
X, p l,
X o ,1 6 , X 1 ,l v . . . ,
r,
We write x6; x1'
x,:
. . 1 Jfn 1i
X(z) : xo I x'z + "' + xn 'zn-t' rr f O ' t l "
l t
l) ' ) n ' l '
Thus.
Y(z): yo * y,z * "' * ln,,z'-', where the valuesx,, Jrioccur at intervalsof 2A, not A as in c,. r : 0, 1,2, We calculateC(z) fot z : Q',Q : s-izrt2n, . . . (2n - l), whereasX(z), Y(z)are calculatedfor the : q 2 ,r : 0 ' l , 2 , . . . , ( n - l ) . v a l u e s( q ' ) 'q, ' : s i z t t n Writing x, for the value of X(z) for z : q'',
x,: > r,q"'1
,ls'2201 I ' : 0 . 1 . . . . .n I '
;i
Y,: > y,s"'I i:n
)
(15.223)
The utility of z-transformsfor digital processing arisesbecausethey can be written by inspectionand manipulatedas simple polynomials.For example,in g 9 . 2L. .w e c o n v o l v e d f: ( l . - t . j t w i t t rg , = t l . ] . - j l . 'r:2and G(z) : I The z-transformsare F(:) : I - z I - jz2;we have * ),
.f,* &,a F(z)G(z):,r._:i):t..,r! _ ::;,, ll _ As anotherexample,in $9.2.4,eq. (9'38) gavethe water reverberationfilter for n : I as - 2 R , 3 R ' , - 4 R 3 , 5 R 4 ,. . . ) .f,: (1,
2 n l
^ \ C , : L c , Q , ' .=r 0 . 1 . . .. . ( 2 n- l ) t=0 Forr:0,1,...,(n-l),
so that
't) C,: (xn* *,qt'* ,.qo'+ "' + x, fl'\' * q'(y,,* y,q" * Yrqo'+ "' + !,-rq''" "),
:
+ q'\Y'q"" \''0"' : X,+ q,Y,.
(ts.22t)
Whenr : n,(n 1' l), . . ., (2n- l),wemustmanipulate the exponentsto expressC, in terms of X,, Y,. Thus, 2 n l
: ( 2 n- l ) . (n I/ : U c i q ' 'r. n , * l ) . . . . .
: We write r : n + lr? so that qri : q\n+n)I: q"'q''' . ence, l ) b e c a u s eq n t : ( e - t n ) tH (-l),q-',m:0,1, fr n-l
H(z) : F(z)G(z) l, the seriesis divergent.Thus, for minimumphase,lal > lbl.The wavelet(b, a) is maximum-phase. When a: tb, the transformis a(l + z) and the inversebecomesinfinite when lonl; ] Band-pass: flro;:
+l' lo,l < lol o, | [g'(") g'(t + t)]' dt expandand iJentify the various integralsas S,,(0) or 0,,(l).) (b) Sameas (a) exceptfor a random function. 15.23 Two functions,X(o) and R( (l - ; coshkA)/(22- 2: coshkA + 1). ) nd (15.187b ) e1 5 . 2 7( a ) S h o w t h a t e q s .( 1 5 . 1 3 6 a come for z-transforms g, " ro,
is identicalwith that of eq. (15.251)exceptthat/l(l) is shifted by k time units. 15.41 Obtain the digital filter correspondingto the Butterworth filter for n : 3. 15.42 Verify the transforms in eqs. (15.262) to (15.269).(Hint: ln eq. (15.263),multiply sinc (ntlZ) by boxr, (r) and useeq. (15.1a6); for eq. (15.264), note the resultin eq. (15.268);for eq. (15.269),note problem6.21a.) 15.a3 (a) Verify eq. (15.216).(Hint: Follow the same procedure as in the derivation of eq. (9.73a) except that there is no equationcorrespondingtof because it is constant.) (b) Verify eq. (15.278). References Andersen. N. O. 1974. On the calculation of filter coefficients for maximum entropy spectral analysis.Geophysics,39l69 72. Beth, M. 1974. Spectral Analysis in Geophysit's. Amsterdam: Elsevier. Bendat, J. S., and A. G. Piersol. 1966.Measurementand Analysis of Random Data. New York: Wiley. Blackman, R. B., and J. W. Tukey. 1958. The MeasurementoJ' Power Spectra. New York: Dover. Burg, J. P. 1972. The relationship between maximum entropy spectra and maximum likelihood spectra. Geophysics, 31:. 31s 6. Burg, J. P. 1975. Maximum entropy spectral analysis.Ph.D. thesis, Department of Geophysics, Stanford University, Palo Alto, California. Cassand,J., B. Damotte, A. Fontanel, G. Grau, C. Hemon, and M. Lavergne. 1971. Seismic Filtering. Tulsa: Society of Exploration Geophysicists.(Translated by N. Rothenburg from Le Filtrage en Sismique. Paris: Editions Technip, 1966.) Cheng, D. K. 1959.Analysisof Linear Systems.Reading, Mass.: Addison-Wesley. Churchill, R. V 1963. Fourier Series and Boundary Value ProbIems,2d ed. New York: McGraw-Hill. Claerbout, J. F. 1963. Digital filtering and applications to seismic detection and discrimination. M.Sc. thesis, Massachusetts Institute of Technology,Cambridge, Mass. Claerbout, J.F. 1976. Funtlamentals of Geophysical Data Processlng New York: McGraw-Hill. Claerbout, J. F., and F. Muir. 1973. Robust modeling with erratic data. Geophysics,38: 826-44. Cooley, J. W, and J. W. Tukey. 1965.Algorithm for the machine calculation of complex Fourier series. Math. Comput., 19:
297-301. Fail, J. P, and G. Grau. 1963. Les filtres en eventail. Geophys. Prosp., ll:131 63.
561
REFERENCES
Finetti, I., R. Nicolich, and S. Sancin. 1971.Review on the basic theoretical assumptions in seismic digital filtering. Geophys. Prosp., 19: 292 320. Kanasewich, E. R. 1973. Time SequenceAnalysis in Geophysics. Edmonton: University of Alberta Press. Kaplan, W. 1952. Advanced Calculus. Reading, Addison-Wesley.
Mass.:
Kulh6nek, O. 1976. Introtluction to Digital Filtering in Geophlts' lc.r Amsterdam: Elsevier. Kurita, T. 1969. Spectral analysisof seismicwaves,Part I, Data windows for the analysis oftransient waves. Spec. Contrib. Geophys. Inst., Kyoto Univ.,9:9'7 122. Lee, Y. W 1960. Statistical Theory of Communication. New York: John Wiley. Papoulis, A. 1962. The Fourier Integral and its Applications. New York: McGraw-Hill. Pipes, L. A., and L. R. Harvill. 1970. Applied MathematicsJor Engineersand Physicists,3ded. New York: McGraw-Hill. Postic, A., J. Fourmann, and J. Claerbout. 1980. Parsimonrous deconvolution. Preprint of paper presented at the SEG 50th Annual Meeting, Houston.
of Communications. lJrbana: University of Illinois Press. Silvia, M. T., and E. A. Robinson. 1979. DeconvolutionoJ Geophysical Time Series in the Explorationfor Oil and Natural Gas Amsterdam: Elsevier. Simpson, S. M., E. A. Robinson, R. A. Wiggins, and C. I. Wunsch. 1963.Studiesin optimum filtering of single and multiple stochastic processes, Science Report 7' Contract AFl9(604)7378. Cambridge, Mass.: Massachusetts lnstitute of Technology. Smylie, D. 8., C. K. G. Clarke, and T. J. Ulrych. 1973. Analysis of irregularities in the earth's rotation. In Methods in Computa' tional Physics,Vol. 13,Geophysics,B.A Bolt. ed., pp. 391 430' New York: Academic Press. Stoffa, P L., P Buhl, and G. M. Bryan. 1974. The application of homomorphic deconvolution to shallow-water marine seismology. Geophysics,39:401 26. Taylor, H. 1981.The /, norm in seismicdata distribution. In De,ilop^rnrt in Geophysical Exploration Methods-2' A. A. Fitch' ed., pp. 53 76. London: Applied SciencePublishers. Treitel, S., and E. A. Robinson. 1964.The stability of digital filters. IEEE Trans. Geosti. Electron., GE-2: 6 18.
Potter, M. C., and J. L. Goldberg. 1987.Mathematital Methods. Englewood Cliffs, N.J.: Prentice Hall.
Treitel. S., and E. A. Robinson. 1981. Maximum entropy spectral decomposition of a seismograminto its minimum entropy component plus noise. Geophysit's,46:I 108 15.
Rietsch, E. 1979. Geophone sensitivities for Chebyshev optimized arrays. Geophysics,44:ll42 3.
Treitel, S., J. L. Shanks, and C. W Frasier. 1967' Some aspects of fan filtering. Geophltsics,32:789-800.
Robinson, E. A. 1962. Random Waveletsand Cv'bernetit' S1'stezrs London: Griffin.
Ulrych, T. J. 1971.Application of homomorphic deconvolution to seismology. Geophysics,36: 650-60.
Robinson, E. A. 1967a. Multichannel Time SeriesAnalysis v'ith Digital Computer Progrums.San Francisco: Holden-Day.
Weast, R. C., ed. 1975.Hundbook oJ'Chemistryand Physir'.r,56th ed. Cleveland. CRC Press.
Robinson, E. A. 1967b.Predictive decomposition of time series with application to seismic exploratio+ Geophysits, 32: 418 84.
Wiggins, R. A. 1977. Minimum entropy deconvolution. In ProoJ- the Internationu! Symposium on Computer-Aided ,udirgt Seismit' Analysis and Distrimination, pp. 7 14. New York: IEEE Computer SocietY.
Robinson. E. A. 1967c. Statisticul Communi(dtion ttnd Detection. London: Griffin. Robinson, E. A., and S. Treitel. 1973. The Rohinson Treitel Reatler. Tulsa: Seismograph Service. Robinson, E. A., and S. Treitel. 1980. GeophysicalSignul Anuly.in. Englewood Cliffs, N.J.: Prentice Hall. Schneider.W. A., K. L. Larner, J. P Burg, and M. M. Backus. 1964. A new data-processingtechnique for the elimination of ghost arrivals on reflection seismograms. Ceophysits, 29: 783 805. Shannon. C. E., and W Weaver. 1949. The Mathematicul Theory
Wiggins, R. A. 1978. Minimum entropy deconvolution Geoexplorution, 16: 21 35. Wiggins, R. A., and E. A. Robinson. lg65 Recursive solution to ihe multichannel liltering problem. J. Ceophys Res, 70:
r 8 8 59 1 . Wylie, C. R., Jr. 1966. Advanced Engineering Mathematics, 3d ed. New York: McGraw-Hill. Yilmaz. O. 1987.Seismk'Data Protessing.Tulsa: Society of Exploration Geophysicists.
Index
Note; Pagenumbers in italics indicate definitions, in boldfaceindicate figures Abbott, H. L., 3 abbreviations,list of, 569 ABC refraction method, 433, 506 abnormal pressure(overpressure),108, l l 8 1 9 , 1 2 6 ,1 2 8 , 1 2 9 , 1 3 0 , 3 5 1 d e t e c t i o no i I l 8 1 9 , 1 2 8 ,1 2 9 , 1 3 0 effect on velocity, 108, 128, 129, 130 role in diapiric flow and faulting, 365, 368.372 absorption, 59 60, J9 coefficient of,59, 180 effect on waveshape, 60 expressionsfor, 59 60 frequency dependenceof, 59, 177, 1 8 0 ,l 8 l in LYL, 124 measurement of, 180 relative importance vs. spreading, 60, 6l values of constants, 180 acceleration-cancelinghydrophone, 223 accelerometerto measure earth motion, 7t5 ?51 used in inertial positioning, 198 accommodation, 401 acoustic impedance, 75 calculation by inversion, I 36 8, I 39 contrast, 76..7: drc to chemical changesor recrystalization, 128, l 3 l , 1 5 2 .1 5 3 a c o u s t i c( s o n i c )p o s i t i o n i n g ,1 9 7 8 o f s t r e a m e r ,1 8 , 1 9 8 ,1 9 9 u s i n g D o p p l e r - s o n a r ,1 9 5 , 1 9 7 8 using transponders, 197 activity, seismic,23 8, 29, 30 A/D (analog-to-digital) conversion, 230 Adachi's refraction method, 433 4 adaptive filtering, 299 addition of complex numbers, 523 of matrices, 520 of traces,see stacking ofvectors,518 adjoint (matrix), 520 AGC (automatic gain control), AVC, 1 5 , 1 8 , 2 2 6 , 2 2 7 - 82, 2 7 age, effect on velocity, 120 aggradation,409 alr gun: arrays, 21 1, 213, 214, 216 far-lield signature of , 214, 211 land,204,205, 218 marine, 18, 68, 21 l, 213, 214, 215, 216,217 use in profiling, 507 waveshape, 214, 216, 217 air shooting, 204,206
airwave,6,8,l47 Airy phase,54,485, 485,486, 510 365,365 alaucogen, Alford rotation,476 technique reconstruction algebraic (ART),497 alias,2'79,282 aliasfilter, 230, 233, 282 aliaslobe,248 aliasing,146,282-3,451 2 spatial,252-3,4512 ambientnoise,225,254 353 ambiguityin interpretation, AmeradaPetroleumCo.,8, l4 Ameradatree,14 200,201, ammoniumnitrate(explosive), 203 226 9.230 2,233 amplifier, analog,2279,231 digital,230,232,234 dynamicrangeof,226 gainconlrol.typesof: automatic ( A G C ,A V C ) ,1 5 ,1 8 , 2 2 6 , 2 2 87 : b r 226:instantanary.230:ganged. neousfloating-point(lFP), 230; 226; manual,I 5; preprogrammed, quaternary, 230 recordingaccuracy,226 for, 226 requirements 24-bit,226,230 amplitude,-i4 in processing, 303,313, adjustments 3I 5, 338,341,392 affectedby changewithin Fresnel zone,155 build-upnearcriticalangle,77-8, 1 6 8 ,1 7 0 on traveltime,177 dependence effectof bedthicknesson, 174,176, 118,179,464:reflectorcurvature on, 156,157;tuningon,174,116, t77,118,119,464 325 of envelope, factorsaffecting , 58 9, 177, I 80, 313 ashydrocarbonindicator,79, 81, t2t 2, 152,415 18,475,478 363,460;seealso mapping(displays), horizonslice as net thicknessmeasure,174,176' 417 preservation, 3l3, 315 2 ,7 8 , 5 3 1 , 5 3 3 spectrum of stackedsectionsvs.normalincidence,3l5 standout,145,146 303,315 surface-consistent,
515
v a r i a t i o nw i t h o f f s e t( A V O ) , 1 8 , 2 1 , 78 81,321,415,418,476 ANA, I93 analog amplifier, 227 9, 231 analog-to-digital conversion (A/D, digitizing),230 analytical Irace,325 anchored transponders(pingers), 197, 453 angle: of approach, 88, 89 of incidence,62, 63 of reflection (refraction), 62, 63 angular frequency, 34 angular wavenumber, .J4 a n i s o t r o p y .3 8 . 5 5 8 . 5 5 , 1 2 2 . 1 2 5 anticipation filter, 2 97 anticlinal trap, 351, 352 antinode, Jj antisymmetric wavelet, l8l aperture, migration, 326, 328 9, 457 aplanatic surface (curve), 428, 429' 500 a p p a r e n td i p , 8 8 , 8 9 apparent dip moveout, 248 apparent truncation, 404 apparent velocity, 88, 130 a p p a r e n t - v e l o c i t yf i l t e r i n g , 1 8 5 ,3 1 5 1 6 , 315,317,318,319 apparent wavelength,88 apparent wavenumber, 88 Aquapulse (sleeveexploder), 217. 507 Aquaseis, 204, 218 arbitrary line (3-D), 4J9 archaeologicalsurveys, 512 a r e a l a r r a y s ,2 4 7 , 2 5 0 1 , 2 5 2 Argo, 193 a r r a y - s o n i ct o o l , 1 3 3 , 1 3 4 array stack, 250 arrays,247-252 areal, 247, 250-1,252 attenuating noise, 184 basic concepts,247 causing high-frequency loss, 253 directivity of,247-51 effect on transients,250 effective length of 248,250 of geophonesvs. source points, 251 harmonic wave response of,24'7 50 lobes, 248 of marine sources, 213' 214, 216 maximum length oi 254 practical constraints on, 251 2, 254 reject region of, 248 responseof, 247-50, 247 tapered (weighted), 250, 251
516 uniform linear,247-50 use in refraction, 252 arrival time (traveltime), 2 ART (algebraic reconstruction technique), 497 artificial illumination display, 460 artillery ranging, 4 aspect ratio (pore), 122,475 asymmetric spread, 88, 243, 268 at-the-geophonedigitization, 18, 223, 224 Atlantic Refining, 8 atomic clock in radiopositioning, 192, 194,195 atomic rveight. effect on velocity, I 16, I19 attenuation: o f c o h e r e n t n o i s e b y a r r a y s ,1 8 4 , 2 5 1 compensation for, 177 o f h i g h f r e q u e n c i e s1, 8 4 , 1 8 5 , 2 5 3 of multiples, 166, 168-9, 320, 321 ofnoise by adding signals. 184-5 of noise by arrays, I 84, 250, 25 I seea/so absorption attenuation mechanisms, I 77 attic oil, 500,514 attribute, -125 complex trace, J2J display,460 inversion to velocity, see seismiclog 3-D (dip magnitude, azimuth, artific i a l i l l u m i n a t i o n ) , 1 8 ,4 6 0 , 4 6 1 , 463, plate 6 autocorrelation, 285 7. 285, 542. 543 calculation using rrratrices,521 normalized, 286 7 of random functions, J4J a u t o m a t i cg a i n c o n t r o l ( A G C ) , 1 5 , 1 8 , ))A ))1 R ))7 automatic picking, tracking, 18, 325, 460 t,460 automatic statics determination, 303 5, 306,307 Autotape, 193 AVA (amplitude variation with angle), 1 8 ,2 1 , 7 8 - 8 r , 3 2 1 ,4 1 5 ,4 t 8 , 4 7 6 AVC (automatic volume control) 15, 18, ))6 ))'7-9, )27 average(equivalent) velocity, 91, 128, 140 AVO (amplitude variation with offset), 1 8 ,2 1 , 7 8 8 1 , 3 2 1 , 4 t 5 , 4 t 8 , 4 7 6 azimuth display, 18, 460,461,463 azimuthal anisotropy, 55 azimuthal VSP,487 B/o ratio: used to determine lithology, I 16, 119 used to distinguish fluids, 122,124 backprojection, 324, 494 5, 494, 496 backreef, J8J, 3M,385 Backus filter, 284 backward branch of diffraction, 68 backward (forward) Gregory-Newton formula, 528 backward prediction filter, 560 balancing sections,370 band-passfilter, 556-7, 5J6 Barbers Hill Dome, l0 barrier reef, 384, 385 Barry's method, 439 40, 441 Barton, Donald C., 5, 10, 15 base of gas-hydratereflection, 128, 131
INDEX
baseof LVL, 124;seealsolow-velocity (weathered) layer(LVL) basemap,J57 basesurvey(time lapse),499 basementthrusts,364 5, 366 basin-floorfan, 405, 408 Bauer'smethodoffinding intervalvelocity, 140 I Bean-bagenergysource,207 beats,44 bed thicknessdetermination,173-7, 178,179 BelleIsle,5 BetsySeisgun(energysource),207,209 bilinearinterpolation,3/ / bin.451,452 binarygaincontrol,2-10 binary scale,229 binomialseriesexpansions, 522 bioherm(reef),383 Biot equations,I l2 "bird dog,"241 (S-wavesplitting),56, 57, birefringence 476,480.482 bit (binary),230 bit (drill),199 blaster,2, 201,242 blastingcap,2, 201,203 blastphone,6, S blind (hidden)zone,95,433, 437,446 block(3-D).453 Blondeaumethod,I 24, 126,2723 Body,J. 8., 5 body force,40 body wave,41, 44 9 Boomer,2l4.2l8 borehole: salt proximitysurveysfrom, 428,429, 500,s02 sonicloggingin, 500 sourcesin, 205 velocitysurveyin, 130 l. 135,14l, 142 borehole-compensated sonde,l3l 2, 133 boreholegeophone,130,488 boreholeteleviewer, 500,503 borehole-to-borehole studies.21, 497 9 bottomcable,260 boundaryconditions,47, 70 lor Lovewaves,52 lor normal-modepropagation, 483 at planeinterface,73,74, 75 for Rayleighwaves,49 for Stoneleywaves,50 lor stretchedstring,35 boxcar,28l, 535 boxcarwindow,558 principle,152 brachistochrone branchof diffraction,68 multiple,156,159 reverse, 156,159 breaks,first, 228,232 brightspot,18,363,415 examples of, 416,plates2, 3, 5, 10,12 broadsidereflectionspread,243 broadsiderefraction spread,42 7 brutestack,452 Brutusenergysource,207,209 bubbleeffect,2ll, 213-14 214,216,217 effecton waveshape, Buffalo gun (energysource),207, 209 bulk modulus,-i8
burial depth: effecton porosity,108,1l8 effecron velocity,118-20,l2l,122 buriedfocus,I 56, 157,158,160,392, 393 for long offsets,156,158 phaseshift at, 157 253 buryinggeophones, butterflyfilter,315 Butterworthfilter,557 8, JJZ cable,geophone, 2, 223,242,244,268; seea/sostreamer cable(streamer)reel,2l3, 225 cablestrumming,225 Cagniard,L., 82 camera: 233-4 electrostatic, photographic, 10,233 rastertype,234 CameronMeadowsfield(casehistory), l0 l3 cap,electricblasting,2,201,203 flooding,500 carbon-dioxide CarterOil Co., l9 CAT scanning,492 comparedwith seismictomography, 497 Cauchy,Baron,3 Cauchyprincipalvalue,544 causalwavelet(function),181,550 CDP,seecommonmidpoint(CMP) celestialnavigation,192 cement-bond log, 133 centraldifference, J28 cepstralanalysis(deconvolution), 298 9,554,5 cepstrumdomain,291J,554 chain(survey),l9l, 241 changesin waveshape: due to absorption,60, 180 dueto filtering,l8l, 182,236,237 due to ghosts,163-5,168,292-3 due to peg-legmultiples,163,168 401, in reflection-character analysis, 412 t3,415 channelwaves(normal-modepropagation, seamwaves),53, 483 6,483, 487,510,511,512 usedto locatefaultsin coal seams, 5t0l2 (erosional), channels 386,388,389,413, 415,463,509, 510,plates8, 10,15, l6 (recording), 8, 10,l l, l4 channels minimumnumberof, 254 chaoticreflections, 409 character(of event),145,146 roots(eigenvalues), 522 characteristic characteristics of events,seedistinguishing featuresof events of faulting,373,375,376 characteristics charge{explosive ). seeexplosives chargesizeand depth,202,254 chart: stacking,244-5 wavefront,91, 95,267 8, 269 Chebyshevnorm (fit), 342 Cheopspyramid,318,320 chirp filter,552 circularraypath,equationsfo1 93 circularshooting(marine3-D acquisition),453,456,plate9
I {
INDE,I-
clay, elTecton velocity, 116, 117 18 client represent ative, 241 clients/contractors, 239, 240 | climate, effect on deposition, 402 clock, aromic, 192, 194, 195 closing contour, 351 c l o s i n gl o o p s , 1 8 , 3 5 2 closure,35l CMP, see common midpoint coal: e x p l o r a t i o nf b r , 2 3 , 4 8 6 , 5 0 8 , 1 2 l o c a t i n gf a u l t s i n , 5 0 9 1 0 , 5 1 2 longwall mining of, 23, 508 properties of, 508 u s eo f i n - s e a m m e t h o d s . 5 0 9 l 2 use of surface methods, 508 9, 510 coastal onlap, 404,406 COCORP,4I8 coefficient of absorption, 59, 180 coefficient of reflection, 35, 63,76 7. 78, lt6, ll7 coefllcient of transmission, 35, 76, 77, 78 cofactor (determinant, matrix), 517. 520 coherence1 , 45 6,145 multichannel. 288 9, 290 coherent noise, 18J a t t e n u a t i o no l I 8 4 , 1 8 5 , 2 5 1 coinc ide n t-t ime curve, 412, 443, 41 7 c o l l i s i o n ( s u b d u c t i o n )z o n e , 3 6 4 5 , 3 6 8 , 418,4t9 color used in displays, 138, 234, 362, 363,460, 464, sae plates,especially p l a t e s1 4 , 1 5 C o l o r a d o S c h o o lo f M i n e s , l 0 comb (sampling lunction), 28I , 536, 539 t r a n s f o r mo f , 2 8 1 , 5 3 9 combination (composite) displays (3-D), 459-60, plate 7 c o m b i n e d{ i n t e g r a t e d )n a v i g a l i o ns y s tems,195 combining geophone and hydrophone records, 293,294 common-depth point, .ieecommonmidpoint (CMP) common-geophone gather,24J common midpoint (CMP), l3 14, 18,
t9, t83,2423,2445 common-midpoint field operations, 242 3,244-5 common-midpoinl galher, 2 45 common-midpoint multiplicity, 2zl4 common-midpoint section, relation to zero-offsetsection, 321 common-midpoint stacking, 244, 320 | e f f e c to i d i p o n , 3 1 6 1 8 ,3 1 9 , 3 2 0 common-midpoint stacking chart,
244 s common-offset galher. 245 common-source galher, 2 45 common-tangent migration method, 328 compaction: differential, 351, 367, 370, 385 effect on velocity, I 18 20 Compagnie G6n6rale de G6ophysique,
t4 in streamer,198,199,225, compasses 453 complexnumber,522 3,522 complexplane,522 complextraceanalysis,325 6 complexvelocity,60
compliance, 3Z component of dip moveout, 89 component of a vector, 518 compositing,229 compressibility,38 compressional leatures (structures), 364 5,366 compressional (P-) wave,44 velocity of, 44 computer: modeling, 391 2 used in survey planning, 241 concentric folding, 370 concordance,404 condensed seclion, 407, 4O9 conjugate complex, 523 conjugate filter, 557 Consortium of Continental Reflection P r o f i l i n g( C O C O R P ) . 4 1 8 constraints (least squares),525 6 continuous coverage(profrling), l, 244 continuous linear source, 203 4 continuous velocity log, see sonic log contouring map data, 356 contracting industry, development ol, t 3 1 4 , 2 34 , 2 6 contractors/clients,239, 240, 241 con trast: acoustic impedance, 76 7 velocity, 76 conventional well-velocity survey, 130 I, t32, t4t,l42 convergent boundary, 164, 366, 367 converted waves, Z-i energy distribution at interface, 76, 78 c o n v o l u t i o n ,2 T 9 8 1 , 5 3 8 , 5 4 0 l , 5 4 5 , 546,548 c a l c u l a t i o nu s i n g m a l r i c e s ,5 2 1 formulas for, 280 l, 548 multidimensional2 , 85,542 relation to cross-correlation,285, 541 of' sampled functions, 548 c o n v o l u t i o nt h e o r e m ,2 8 0 l , 5 3 8 , 540 1.545.546 o o n v o l u t i o n a lm o d e l , 3 7 , 1 4 1 . 2 8 3 4 correcting for: a b s o r p t i o na n d p e g - l e gm u l t i p l e s ,3 1 3 near-surfacevariations, 261 2, 263.
266.303 6, 307,338 sourcesignature,338 sphericaldivergence, 315, 492 usingfirst breaks,256,259 usingrefractionprofile,266 vtr vB,256,258 correctingreflecliondata: 262 differentialweathering, dip moveout(DMO), 18,91,306, .ll6 18.319,320:rulesfor applying,3 I 8 for geophones in betweensource points,266 normalmoveout(NMO), I9, 146, 303 specialrefractionprofile for, 266 weathering),15,l8 statics(elevation, 1 9 ,1 4 6 , 2 6 21 , 2 6 3 , 2 6 6 , 3 063, 307,338 staticsfor marinedata,457 at sourcepoints. for traveltimes 261 2,263,26 for waveletvariations,292,295.298, 299 300
correcting refraction data, 429 correlation (mathematical), 285 8, 289,
s38,s412,543 autocorrelation, 2857, 542,543 calculation using matrices, 521 cross-correlation, .reecrosscorrelation multichannel coherence,288-9 normalized, 286-7 ofVibroseis data, 208, 261,287 8, 289 correlation function, 285, 541 normalized, 287 correlation ghost, 208 correlation reflection method, 15, l8 correlation of reflections, 15, 268 a c r o s sf a u l t s , 3 7 3 , 3 1 7 with refractions, 429 corridor stack, 490, 492, 493 cosine transform, 533 cosine window, 559 costs, 26 8, 30 coupled waves,57 coverage,redundant, 242 C r a m e r ' sr u l e , 5 l 7 l 8 C r a w f o r d ,J o h n M . , l 9 creep strain, 38 crew: activity: 23, 21, 25, 26. 28. 29 organization of,239 40 criterion (norm) for goodnessof fit, 259,342,559 critical angle, 63 damping (geophone),220 distance, 9J crooked-line methods, 246, 248 oross-oorrelation,285, 287 8, 538,
s4t 2, s43 calculation using matrices, 521 cycle skip, 304 normalized, 287 of random functions, 543 relation 1o convolution, 285, 541 of sampled functions, 548 of Vibroseis recordings, 208, 261, 287 8,289 cross-correlationtheorem, 285, 538, 54t 2 cross-dip,8890 cross-energyspectrum, 542 cross-equalizetraces,295 cross-holemeasurements,497, 498, 499 orossline (3-D slice),459 c r o s s - p r o d u c(t v e c t o r s ) ,5 1 8 1 9 ,5 / 8 cross-secttons: correlating reflectionson, 268 drawing phantoms on, 268 effect of not migraIing,267 record sections, 18, 19,268,429 types of (depth, time, migrated, unmigrated),267 crossover distance.96 cross-spread,89, 243 crossline(3-D),459 crow's foot array,252 c r u s t a ls t u d i e s , 4 l 8 l 9 subsidence,40l2,403 cubic packing, 107, 108 curl, J19 curvature of reflector, see reflector curvature curve of maximum convexity. -l2Z
578 curved-raypathweatheringcorrections (Blondeaumethod),124, 126, curvedvelocity surfacesproducinglocusing,156-7,160 gutoff,229 cutoff frequency,229 cycle,eustatic,402, 404-5, 406 cycleskip: in cross-correlation, 304 in S-waveprocessing,474 in velocity logging,132 cylindrical divergence,59 cylindrical-wave simulation(Simplan section),322 4 D/A converter,233 d'Alembert's solutionof waveequalion. 34,41, damping(geophone) critical,220 electromagnetic, 15,219,221 mechanical, 218,219 oil,l5 dampingfacIor,60 dataacquisition,239 data block (on seismicsection),353,354 data display,.reecamera;displaymodes data ownership, 239 data processing, 229,275 343 apparentvelocityfiltering,185,315 1 6 ,3 1 7 , 3 1 8 , 3 1 9 automaticstaticscorrection,303 6, 307 convolution,279 8l; srz a/.roconvolution correlation,285-8 ' data reduction.reflection,261 2, 266 8; seealso data reduction,reflection deconvolution, 21, 285,292 303;see a/.sodeconvolution earlyhistoryof, 275 fieldprocessing, 261 flow chart, 341 frequencyfiltering,18,229,233,300, 301 interactiveprocessing, 340 migrationmethods,267 8,326-35. 336.337;seeaisomigration objectiveof, 276 phaseconsiderations, 290 I preservation of amplitude,313, 3l 5 sequence, typical,335,338,340,341 signatureprocessing, 297 stacking,19,244-5,316 24;seealso stacking velocityanalysis,18,306 13,314, 315;seeaisovelocityanalysis workstations, 340 data rate,223 data recording,226 34 analog,227 9, 231,232,233 digital, 18,20 1, 230,232,233,234 data reduction,reflection,261 2,266 8 drawinghorizonson sections, 268 elevationand weathering corrections. 15,261,2,266 fieldprocessing, 261 picking and gradingrelections,266 7 preparingcross-sections, 267-8 useof recordsections, 268 datum, reference,261
INDEX
De Golyer,EverettLee, 5, 8 de Moivre'stheorem,523,564 deadreckoning,I92, I97 Decca,193,194 decibel,59 conversiontable for, 571 (detachment d6collement zone),365, 367,369 deconvolution, 21, 285,292 303 analog,l8 cascading,292 choosingparameters for, 302 3 delayedspike,287 deterministic inverse-fi ltering,292 gapped,298 homomorphic(cepstral),298 9,298 multichannel,303 phasedetermination in, 291,296 predictive,166,168,298,341 spiking(whitening),295 8 time-variant(TV), 300,302 waveletshaping,298,299-300,301 deghosting, 292'3, 294 del(vectoroperator), 519 delaycap,203 delayoperator,528 delaytime,439 methods of refraction computation: Barry'smethod,439,40,44li Tarrant'smethod,440,441;Wyrobek's method,441,2,M,447 delayedspike(deconvolution), 297 demultiplexing, 230, 335 Denham'slormulafor high-frequency limit, 188,235,253 densities of minerals, I 16,I 17,I t9 of rocks,I 16,I 17,I 18,ll9; relation to mineraldensities, I16, lt9 density,relationto velocity,ll2, ll4, i l 5 , l 1 6 ,l 1 7 ,l 1 9 Gardner'srule, I 16,I 19 densitylogs,I l4 depositional energy,398 depositional models,404-5,406,407 depositionaltime line (surface), 403 4, 40s depthof burial: effecton porosity,108,l18 effecton velocity,118-20,l2l,122 depthcontroller,18,225,226,221 depthconversion factor,433,436 ,u {r P- (^r r, h . l - ur r-L^! !+r v^r .,
1f
=o F ;
';i
i6 i >E d o q >
a , E ; 6 o 0 2 .:q:ls'Y
! c F V X E E - i
;o ,F E E 'i o ? - . , 4 -
H e. ' E : E5 6
.=
-.= k h
EHEE a o O t r -; tra: b^9 6 o *i>,G o =
' :
=
_^tr q)u :
qH
E)
Eg;: 6 F.-'q. L
Q =
q 9 U E E F } I ? ; - ! o x
h
U
f , : i a f * , * q s * r * s : 5 6 ! *
t
, . , ' , , : l , : , : ' ', , i ,
'rr'*#*flsd**
o o
E
tr
3150
9250 Llnc
3300
Plate 2 Bicolor display showing stackedhydrocarbon accumulations.Note high amplitudes (bright spots),polarity reversals,flat spots,time sagsdue to the increasedtime to traversethe hydrocarbonaccumulations.(From Brown, l99l: 163.)
-fT
ll
I
WELLA
t.xs -'lr
it I
) ) )l
L ;
i , l I Ir ) ) ) t >
) l I ? )) )! )' ' ) I D l} ) ] I I ; t I t
i , i )t
ir
!t
iiriiiilliiri
I r )r , ; ) l EEEIr ) r l, T.rll pl r -t:r-:
D )
> -
l r : l ) ) ); t ) Ir I
l F I
I
l
ili
ii
I
t
tt, ; D D
t t
I
lr
I
I t D D t D 1 l
) ,
D ! ' D ) , t ! t 't I ' ) l ) ) ) lr t
b > * !
l
l
r
l l
l b > - D >
I
) a l ) t I
t
l
l
I
r
I
I
t
l
ir
t
l l L F D D p t, t - l p > t
l
t ] ) D t t
)
,
>)
!
r
r tr rr
l
D
|1
l
l|-
I
i.l! i i l )
I
' ' ) ) I r) ; ) )
I
J- f*
I I I i I t) ) I I t Di ) I
I
i i l i t ; r,
I
l
r . 8s
) ll )l , ) ) I) I I
)D )p ) ;
I
a
I
l ; a l
}'.
il
I
t l
) r )
r'.
a
l
I r l '
)r tf i; )) > ) r)
l
I l
iil
l}
t
)t l ; ; l ; - ) )I )) . t ' I I r f t , r r ) ) ) ! It I f ! ) > F; l ; t l > , ;.) ) L ) ; l - frF 7 ' ; ) r i & I P t l. ,r t I ll F ttD ; ll ' )l It ?t l i l lfi )' D;e , I ; )l lr I :) I t , ) l ) ] Dl I t ' ) D D pl} I ) I ;, t t ) ) I ) ) ) ) l| |- f r r ' ;' ) t- rt ) )D )I )t I I ) t ) t r l )>' t, l )) ) ) )) )) )l ,I! ' I l I i t i l t ) D ) ) ' l I F l ) l I l) ) I l ) D ) ) , l ) ) )) Il ) ; L D )) ) l D I t I ) ) I t
ID I)
I
,
,
I' , I l I I l l ; ) t l ) ) l>
I ;
"} I . ) D. I l
) ),
l ! I
l I
, .
t
D
t I
I
l
l
I
t I
I
rrFt"
'
I
lI
r l
;
t
l >t
'
7 |
I
I
l I
t
I
,
|- t- ;) ) l , ? ' tl I l ) l D I I t ) I t-._l t a
r
I
D
' I l
I
r.2s h
.; ,H! ;A; sl ' E ! sI ;i ; ;! ??r=: p "FF i Ft:t " I ' r l -I C H A N G E . ) tNP:
. rrl,{JE.
t+#*:iT-S
l
i
r
) p F l '
p t
I
I
l
t b
r)
b
)
D
s
) )
t
D DD pD I
3i,ii s
I t l lr
i l
I ;
D
:
? ' FLAT I
't"D . &F * r r ) '* . p i.* t l$ & tr l D > I l ) l t D lp ) t ) l ) ' ) 2 I I !F )r ) * * t ; ; l r I p L ;, p F )N} ) ) r r a D i, F b ' r'u I : v F"tsI t* r .1- !- .. * r I* t ! sr} r t 3 l ; L * ' l p '* & r s* I I : ) D l ? p 7lf t ? f"t * pr l r a ) ) 7 P pD I * ) t ) )2 t )I t I l D l t ; ? I'lt )}) | , ) ) F ' , t ; D> F } }} ) > l I h I 7 l l t- t r i. rI r )t +I I I F t l ) ) ;; )l l l ) > ) > i ,t i ? ) * I t ) * p i* ) , )* )b ) aI fl ) ' ) ) ) l. p )p DIt F * l$ )r l; t ; l I ) l l I > )r )* I t ) ) r F, ) ) I I l ). > t
,
I
I
tI tI
p
I !
t
I
"
l 5
I
*f
I
F
I
rr l
I
l
'l-
)
I t
D
ili
I
$
I
I
I
l I
l
l
l
F
I
I
t
l
l t
ll
l
r.ss
t
WATTRSANT}
lf eas sAND
Plate 3 Hydrocarbon indicators shown on dual-polarity variable-areasection. (From Brown, 1991: 139.) (a) Variable-areasection; (b) interpretation.
Plate4 A vertical section(top) from a 3-D volumeinverted to seismicJogform and a horizon slice(bottom) over a hydrocarbon accumulation.(Courtesyof CGG.)
COMPOSITE ,rf SP !&rs
-. s
1't000-
w'" !3]*df,;:
*'*!f..
"f
j* ''-.Ad
'*ffi"s-' Plate 5 Fault slice,Nun-River Field, Nigeria. This section 75 m from a complexlycurved fault plane showsbright spots and flat spots to indicate hydrocarbonstrapped againstthe fault. (From Bouvier et aI..1989.)
H*" tlr,{tr$ \
l ,$0*
!ru
{& itl s
:3 &f) {&
s
{_}
I
rm
, *"'m:11*
l W
I
tN" Lr!{fis \
I rmo{n l& g to {o () $
*-:lm':-f-nlr Plate 6 Dip and azimuth displaysfor a horizon slicehelp locatefaults. Somefaults show better on one display,someon the other,many equallywell on both. (From Bouvier et al., 1989.)(a) Dip-magnitude display;(b) dip-azimuthdisplay.
Plate 7. Compositedisplaysat a workstation help in understandingfeatures.(from Brown, 1991;70, 71.) (a) Portion of a time slice(top half) and vertical section(bottom half); (b) cubedisplayshowingline and crosslineon sidesand time sliceon top.
"
i '
,,"-r;,1
Plate 9
Time slice from a circle shoot about a salt dome. (From Brown, 1991:63.)
l ' l a t c l 0 H o r i z o n s l i c c s h o w i n g a s t r e a mc h a n n c l .T h e s u p c r - i m p o s ect o l n l o u r s i l l u s t - r a t ct l l c s l n l c t r . l r c a r t d t h e b r i , s l t t n e sisn t h c h i g h p o r t i o n o f t h c c h a n n e l i n d i c a t c sh y d r o c a r b o n si l t a c h a n n e ls a n t l r e s e r v o i r ' ( F r o m B r o w n . 1 9 8 5 :1 2 3 . )
Plate 11 Horizon sliceal,ongan angularunconformity reflection.The NW-SE lineationsindicatethe subcropof differentmembersdipping to the SW,and the W-E lineationsindicatefaults. (From Brown, 1991:135.)
Plate l2 Horizon slicewith overlainstructuralcontoursshowingbright spots indicatingstratigraphic hydrocarbon-gas accumulations, in a turbiditefan. (From srown, t99l: t3b.)
Plate 13 Fault slice showing structure adjacent to the fault plane and secondary splinter faults. (From Brown. Edwards. and Howard, 1987.)
o
1 I o E t o
E
?
(a)
#m O
w !t80 1480
u o It I
€00
a
(E
FN tt40 sI80 6g) (b)
T
Plate i4 Portion ofa seismicline showingthe useofa nearbyprominentreflectionto flatten the event associatedwith the l9C reservoir.The eventassociatedwith the reservoirwasidentifiedusing a VSP (fig. 12.13).'(AfterHardage,1993;courtesyof TexasBureauof EconomicGeology.)(a) Common variabledensitycolor coding; (b) biasedcolor coding that helpsshowup geologicallysignificantfeatures.
E't 'l J
I
oJ
d
50 o .E C
40 s0 2A 10
Plate 15 Horizon slicesmade as indicatedin plate 14.An interpretationis shownin plate 16.(After Hardage,1993;courtesyof TexasBureauof EconomicGeology.)(a) Common variable-densitycolor coding; (b) biasedcolor coding that helpsdefineancientstreamdeposition.
N
CROSSLINES 19C FESEFVOIB REFLECTIONAMPLITUDE-SEELIGSON
Plate 16 Pre- and post-3-D interpretations.(After Hardage,1993;courtesyofTexas BureauofEconomic Geology.)(a) Interpretationbasedon well control and2-D seismicdata (blue lines.;,superimposed on horizon slice;(b) interpretationbasedon 3-D horizon sliceand well data. Display parametersfor (a) and (b) are slightly different.
I
L s6 l ; ( J
(\
t
r
I
d
l
&
l-E W
\o €
i{ri
^ q
- a . N
:
* 8 H I
.0O
d
€'oo
>E
l
EEF6E
F ,rl'Fl16l
c : ) v - '
HE si:B.g 6
X
:
o
EF,Edg Fgi33
- * O
I
;
=
ct (\l
Hb * - r y E
€;5
"qs
i>aoE t
P
o
?
t \
c B . - ; *
c . ^ . : :
ciEbi-t
o \o o € ' (o\ (\ )